
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 雷达通信一体化通过资源共享机制,在提高系统频谱利用率的同时实现了轻量化设计,广泛应用于空中交通管制、医疗监测、自动驾驶等领域。传统的雷达通信一体化算法通常依赖于精确的数学建模和信道估计,无法适应难以刻画的动态复杂环境。人工智能凭借其强大的学习能力直接从大量数据中自动学习特征,无需对数据进行显式建模,促进了雷达通信的深度融合。该文围绕人工智能驱动的雷达通信一体化研究展开系统的综述。具体而言,首先阐述了雷达通信一体化系统模型与核心问题。在此基础上,从雷达通信共存和双功能雷达通信一体化两个方面梳理了人工智能驱动的雷达通信一体化最新研究进展。最后,总结全文并对该领域潜在的技术挑战和未来的研究方向进行了展望。Abstract: Joint radar communication leverages resource-sharing mechanisms to improve system spectrum utilization and achieve lightweight design. It has wide applications in air traffic control, healthcare monitoring, and autonomous vehicles. Traditional joint radar communication algorithms often rely on precise mathematical modeling and channel estimation and cannot adapt to dynamic and complex environments that are difficult to describe. Artificial Intelligence (AI), with its powerful learning ability, automatically learns features from large amounts of data without the need for explicit modeling, thereby promoting the deep fusion of radar communication. This article provides a systematic review of the research on AI-driven joint radar communication. Specifically, the model and challenges of the joint radar communication system are first elaborated. On this basis, the latest research progress on AI-driven joint radar communication is summarized from two aspects: radar communication coexistence and dual-functional radar communication. Finally, the article is summarized, and the potential technical challenges and future research directions in this field are described.
-
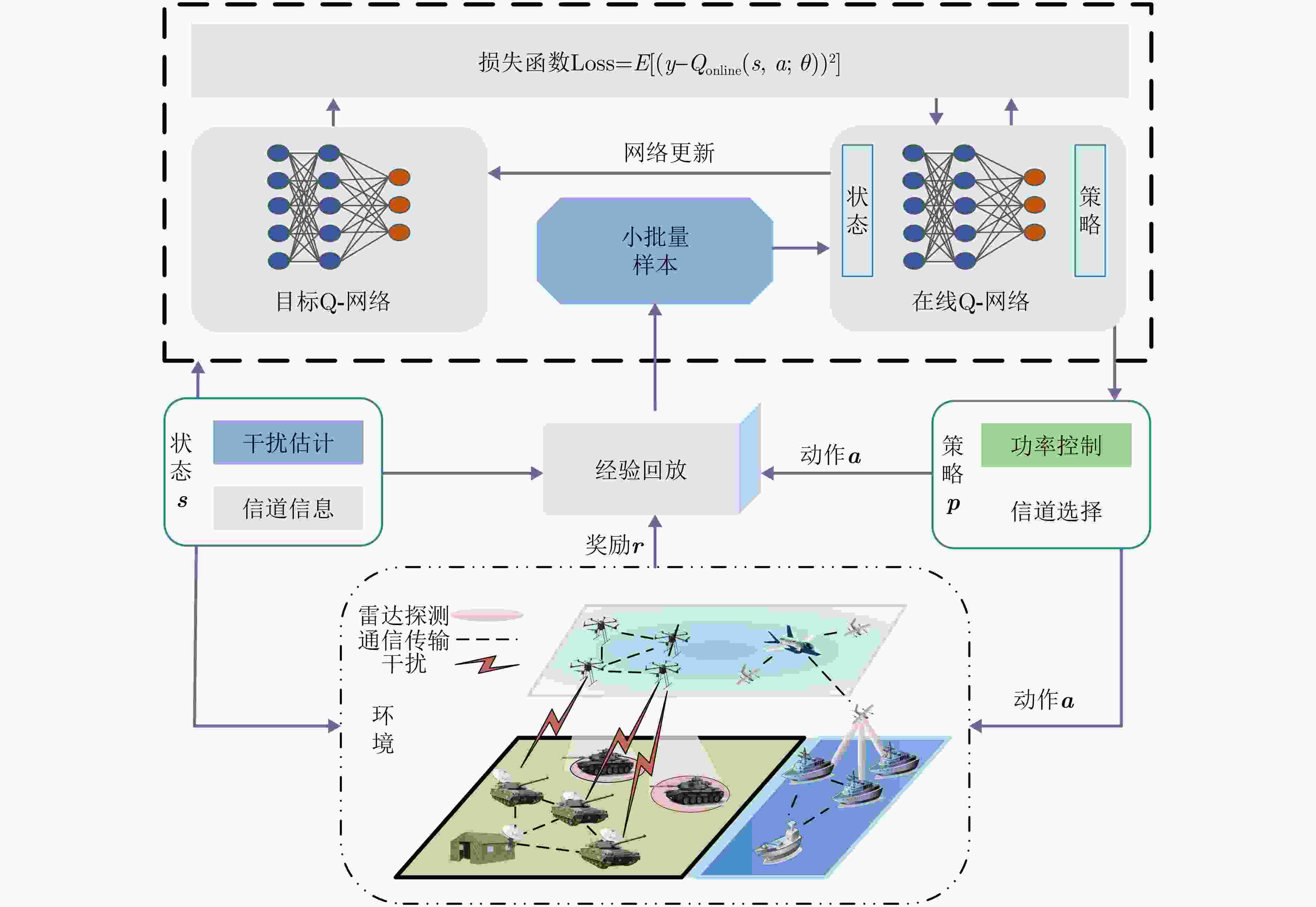
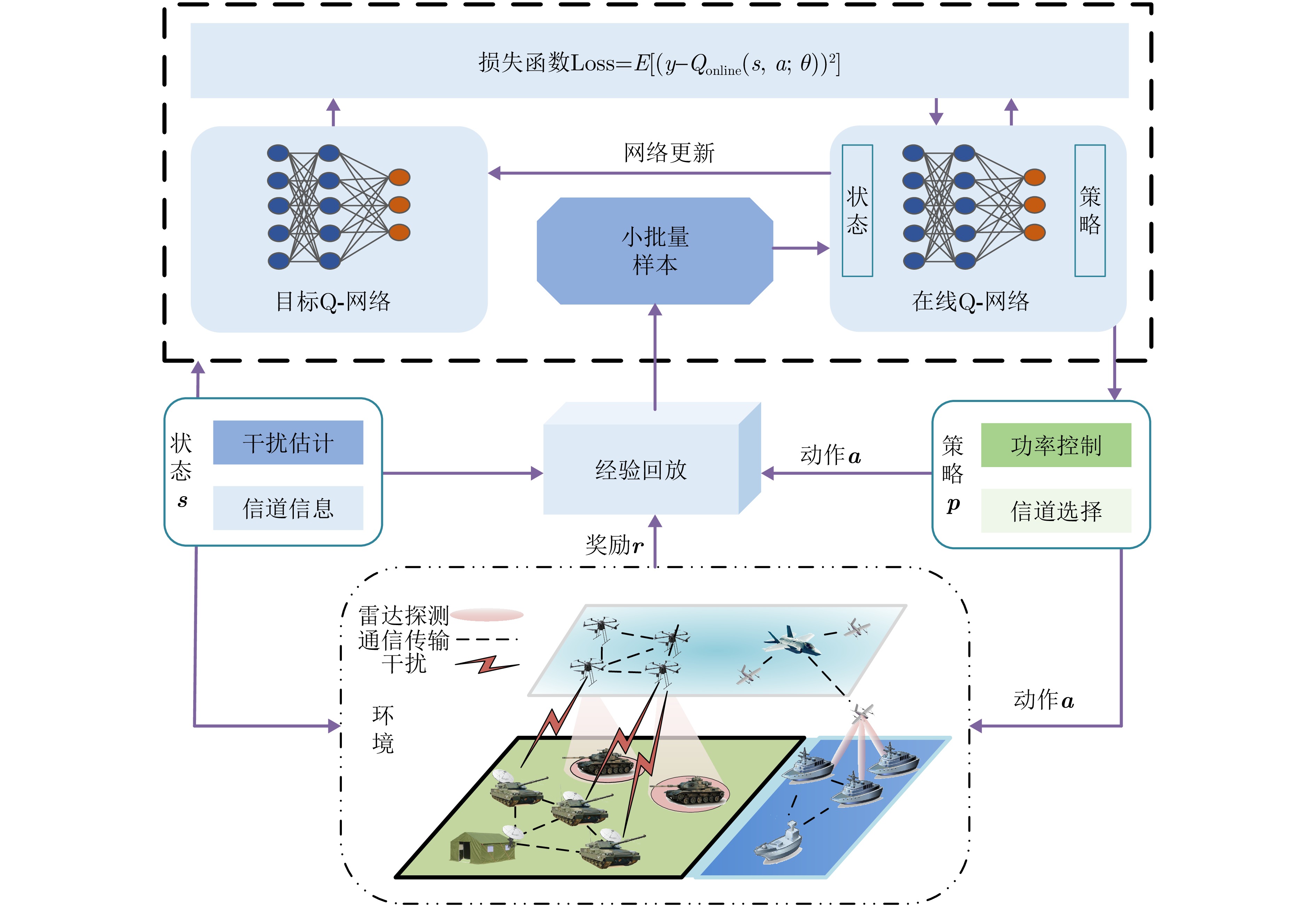
图 4 基于资源分配的智能干扰管控策略
Figure 4. Intelligent interference control strategy based on resource allocation
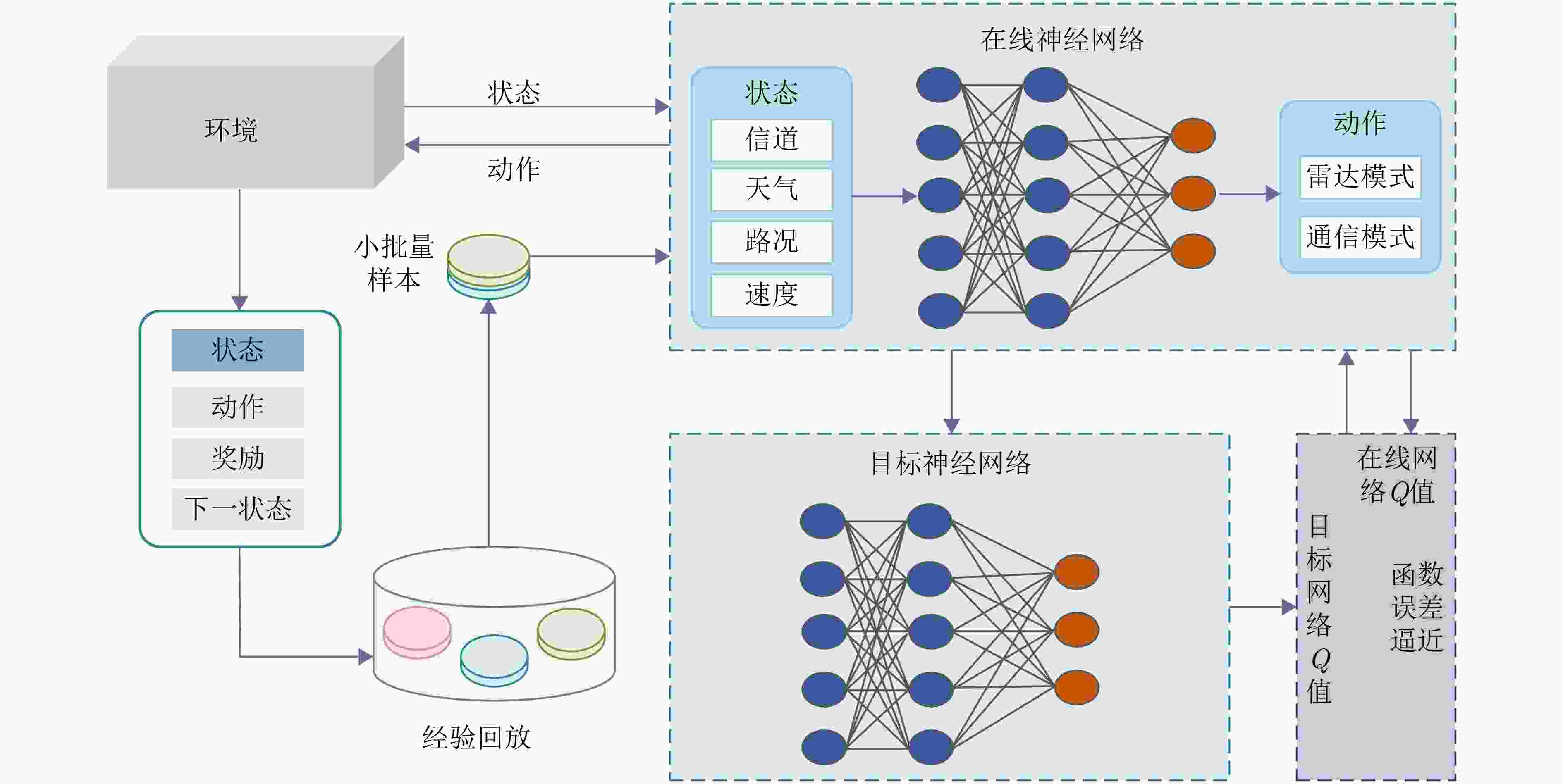
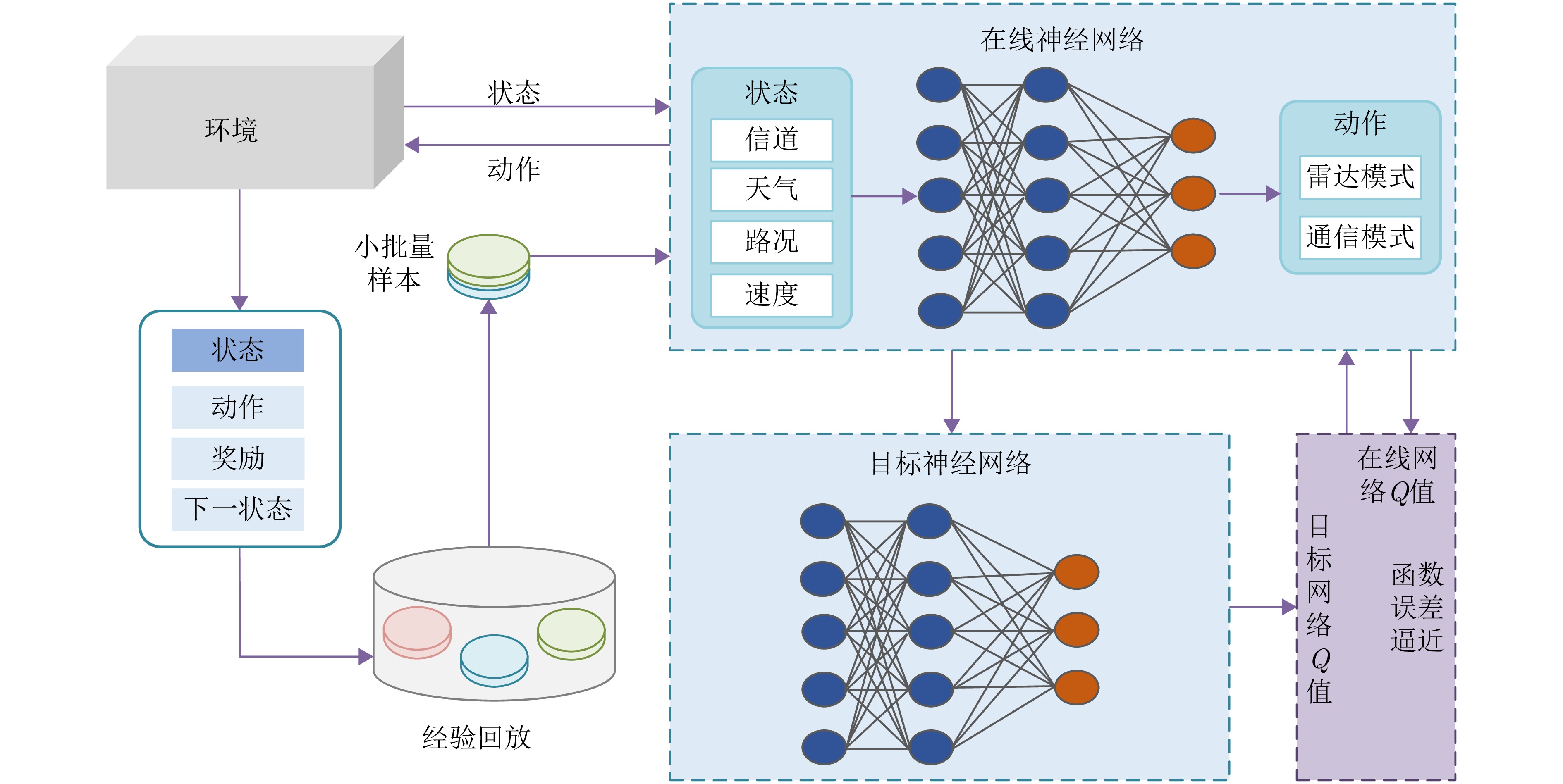
图 7 面向动态需求的智能资源管控策略
Figure 7. Intelligent resource management and control policies for dynamic requirements
表 1 人工智能驱动的雷达通信共存算法比较
Table 1. Comparison of AI-driven radar communication coexistence algorithms
算法类型 适用的核心问题 优点 缺点 文献 强化学习 基于资源分配的干扰管控 通过与环境交互,适应频谱状态的快速变化,
能处理不确定的干扰问题RL与环境大量交互带来了
高昂的成本问题[46] 在线学习 基于资源分配的干扰管控 通过持续学习以缓解频谱冲突,且每步训练
的计算复杂度较低易错失全局最优解 [58] 深度强化学习 基于资源分配的干扰管控 通过强化学习适应频谱状态的快速变化,
利用深度学习处理高维状态空间计算复杂度较高 [38,59,60,61,64] 元学习 基于资源分配的干扰管控 缩短模型训练时间,快速获取干扰抑制决策 当新任务与训练任务差异较大时,
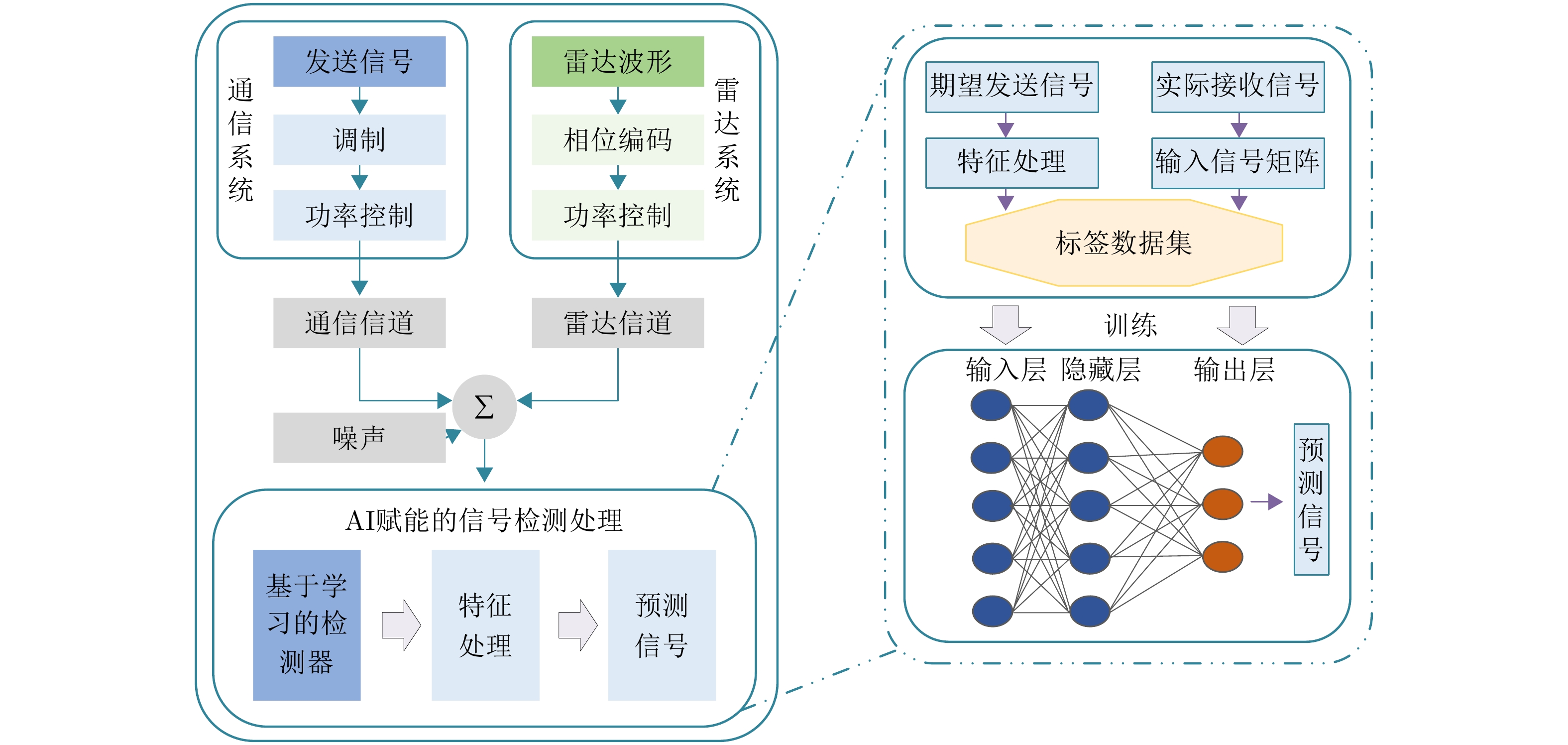
效果不佳[65] 深度学习 信号检测处理 直接从原始数据中学习特征,避免了对信
道状态信息的依赖计算资源需求大 [48,67−69] 模型驱动的
深度学习信号检测处理 将雷达通信的物理底层原理与深度学习
框架相结合,更易于模型训练模型的表达能力受制于理论假设 [70]  下载: 导出CSV
下载: 导出CSV
表 2 基于人工智能的双功能雷达通信一体化算法比较
Table 2. Comparison of dual-functional radar communication algorithms based on AI
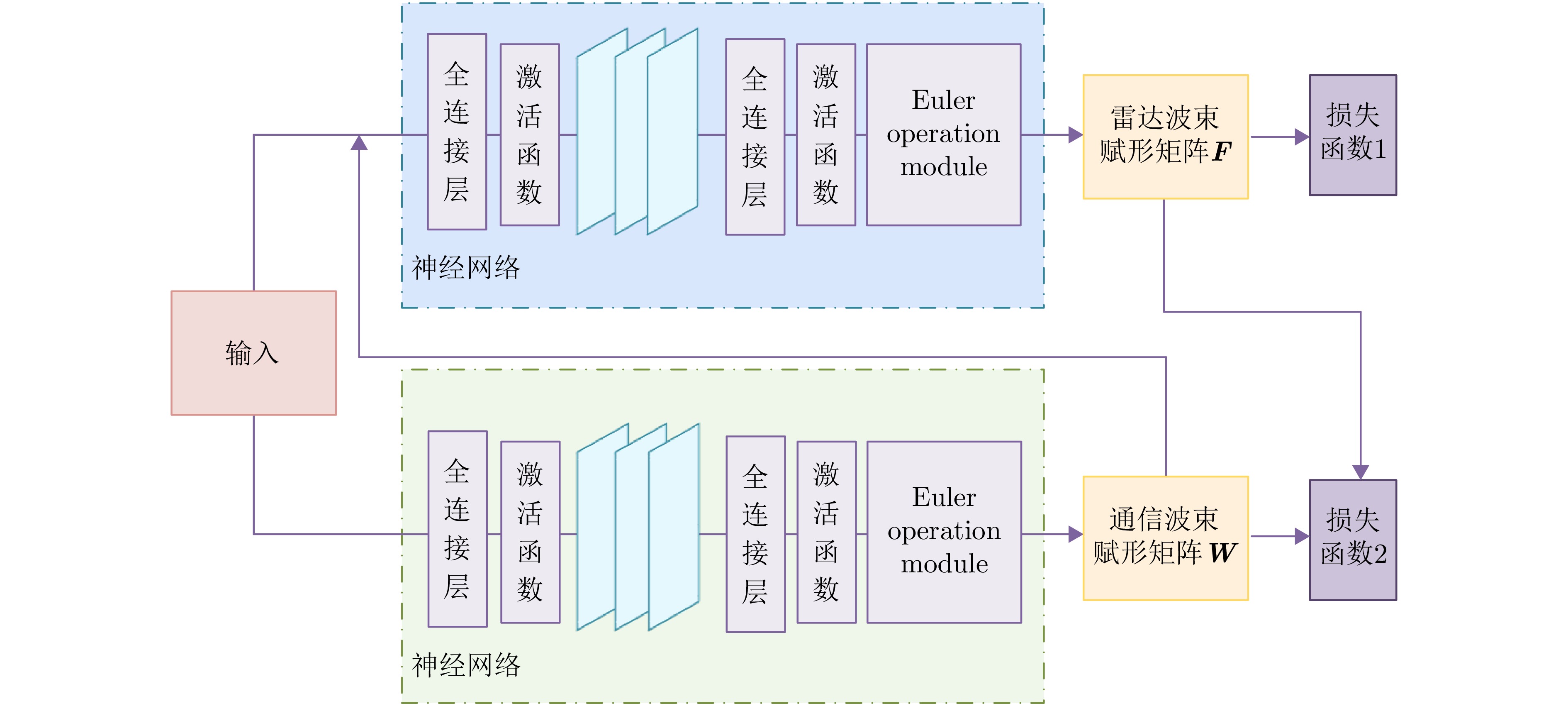
算法类型 适用的核心问题 优点 缺点 文献 深度学习 波束赋形优化 通过损失函数设计实现性能折中,
可解决复杂的非凸优化问题模型易过拟合,泛化能力不足 [76,77,79,81] 在线学习 波束赋形优化、面向动态
需求的资源管控通过处理小批样本,实时捕捉环境变化,
可动态优化波束指向与管控策略难以处理高维度优化问题 [78,84] 强化学习 波束赋形优化 具备较强的全局优化能力,可用于时
变信道下的波束赋形数据采样效率较低 [82] 深度强化学习 面向动态需求的资源管控 利用神经网络处理高维度状态空间,
通过强化学习动态调整分配策略算法收敛速度较慢 [10,13] 多智能体深度强化学习 面向动态需求的资源管控 引入GNN的结构信息捕获能力,
可协调多智能体间的资源分配图结构快速变化会引起模型的
泛化能力下降[86] 迁移学习 面向动态需求的资源管控 加快了切换到新环境中的策略收敛速度 负迁移会导致学习性能下降 [37]
下载: 导出CSV
-
[1] YANG Ping, XIAO Yue, XIAO Ming, et al. 6G wireless communications: Vision and potential techniques[J]. IEEE Network, 2019, 33(4): 70–75. doi: 10.1109/MNET.2019.1800418. [2] LIU Fan, CUI Yuanhao, MASOUROS C, et al. Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(6): 1728–1767. doi: 10.1109/JSAC.2022.3156632. [3] ZHANG J A, RAHMAN M L, WU Kai, et al. Enabling joint communication and radar sensing in mobile networks—a survey[J]. IEEE Communications Surveys & Tutorials, 2022, 24(1): 306–345. doi: 10.1109/COMST.2021.3122519. [4] LIU An, HUANG Zhe, LI Min, et al. A survey on fundamental limits of integrated sensing and communication[J]. IEEE Communications Surveys & Tutorials, 2022, 24(2): 994–1034. doi: 10.1109/COMST.2022.3149272. [5] XIAO Zhiqiang and ZENG Yong. An overview on integrated localization and communication towards 6G[J]. Science China Information Sciences, 2022, 65(3): 131301. doi: 10.1007/s11432-020-3218-8. [6] 霍曼, 邓中卫. 国外军用飞机航空电子系统发展趋势[J]. 航空电子技术, 2004, 35(4): 5–10. doi: 10.3969/j.issn.1006-141X.2004.04.002.HUO Man and DENG Zhongwei. Development trend of foreign military avionics[J]. Avionics Technology, 2004, 35(4): 5–10. doi: 10.3969/j.issn.1006-141X.2004.04.002. [7] QUAN Siji, QIAN Weiping, GUO J, et al. Radar-communication integration: An overview[C]. The 7th IEEE/International Conference on Advanced Infocomm Technology, Fuzhou, China, 2014: 98–103. doi: 10.1109/ICAIT.2014.7019537. [8] FENG Zhiyong, FANG Zixi, WEI Zhiqing, et al. Joint radar and communication: A survey[J]. China Communications, 2020, 17(1): 1–27. doi: 10.23919/JCC.2020.01.001. [9] LIU Keqin and ZHAO Qing. Indexability of restless bandit problems and optimality of whittle index for dynamic multichannel access[J]. IEEE Transactions on Information Theory, 2010, 56(11): 5547–5567. doi: 10.1109/TIT.2010.2068950. [10] HIEU N Q, HOANG D T, LUONG N C, et al. iRDRC: An intelligent real-time dual-functional radar-communication system for automotive vehicles[J]. IEEE Wireless Communications Letters, 2020, 9(12): 2140–2143. doi: 10.1109/LWC.2020.3014972. [11] ZHANG J A, LIU Fan, MASOUROS C, et al. An overview of signal processing techniques for joint communication and radar sensing[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(6): 1295–1315. doi: 10.1109/JSTSP.2021.3113120. [12] LIU Fan, MASOUROS C, PETROPULU A P, et al. Joint radar and communication design: Applications, state-of-the-art, and the road ahead[J]. IEEE Transactions on Communications, 2020, 68(6): 3834–3862. doi: 10.1109/TCOMM.2020.2973976. [13] WANG Min, CHEN Peng, CHEN Zhimin, et al. Reinforcement learning-based UAVs resource allocation for radar-communication integrated system[C]. 2021 IEEE International Conference on Radar, Haikou, Hainan, China, 2021: 2212–2215. doi: 10.1109/Radar53847.2021.10028618. [14] MU Junsheng, GONG Yi, ZHANG Fangpei, et al. Integrated sensing and communication-enabled predictive beamforming with deep learning in vehicular networks[J]. IEEE Communications Letters, 2021, 25(10): 3301–3304. doi: 10.1109/LCOMM.2021.3098748. [15] YANG Liu, WEI Yifei, FENG Zhiyong, et al. Deep reinforcement learning-based resource allocation for integrated sensing, communication, and computation in vehicular network[J]. IEEE Transactions on Wireless Communications, 2024, 23(12): 18608–18622. doi: 10.1109/TWC.2024.3470873. [16] ZHAI Weitong, WANG Xiangrong, CAO Xianbin, et al. Reinforcement learning based dual-functional massive MIMO systems for multi-target detection and communications[J]. IEEE Transactions on Signal Processing, 2023, 71: 741–755. doi: 10.1109/TSP.2023.3252885. [17] FRI C and ELOUAHBI R. Machine learning and deep learning applications in E-learning systems: A literature survey using topic modeling approach[C]. 2020 6th IEEE Congress on Information Science and Technology, Agadir-Essaouira, Morocco, 2020: 267–273. doi: 10.1109/CiSt49399.2021.9357253. [18] THOMAS R N and GUPTA R. A survey on machine learning approaches and its techniques[C]. 2020 IEEE International Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 2020: 1–6. doi: 10.1109/SCEECS48394.2020.190. [19] JANIESCH C, ZSCHECH P, and HEINRICH K. Machine learning and deep learning[J]. Electronic Markets, 2021, 31(3): 685–695. doi: 10.1007/s12525-021-00475-2. [20] JAGANNATH J, POLOSKY N, JAGANNATH A, et al. Machine learning for wireless communications in the Internet of things: A comprehensive survey[J]. Ad Hoc Networks, 2019, 93: 101913. doi: 10.1016/j.adhoc.2019.101913. [21] XIE Junfeng, YU F R, HUANG Tao, et al. A survey of machine learning techniques applied to software defined networking (SDN): Research issues and challenges[J]. IEEE Communications Surveys & Tutorials, 2019, 21(1): 393–430. doi: 10.1109/COMST.2018.2866942. [22] FENG Xu, NGUYEN K A, and LUO Zhiyuan. A survey of deep learning approaches for WiFi-based indoor positioning[J]. Journal of Information and Telecommunication, 2022, 6(2): 163–216. doi: 10.1080/24751839.2021.1975425. [23] TAVIK G C, HILTERBRICK C L, EVINS J B, et al. The advanced multifunction RF concept[J]. IEEE Transactions on Microwave Theory and Techniques, 2005, 53(3): 1009–1020. doi: 10.1109/TMTT.2005.843485. [24] 刘闯, 杜自成, 王伟. 多功能综合射频技术在地面无人战车上的应用[J]. 火控雷达技术, 2020, 49(4): 23–26. doi: 10.19472/j.cnki.1008-8652.2020.04.005.LIU Chuang, DU Zicheng, and WANG Wei. Application of multifunctional integrated RF technology on ground unmanned combat vehicles[J]. Fire Control Radar Technology, 2020, 49(4): 23–26. doi: 10.19472/j.cnki.1008-8652.2020.04.005. [25] CIFTLER B S, ALWARAFY A, and ABDALLAH M. Distributed DRL-based downlink power allocation for hybrid RF/VLC networks[J]. IEEE Photonics Journal, 2022, 14(3): 8632510. doi: 10.1109/JPHOT.2021.3139678. [26] 朱伟强, 王克让, 许华健, 等. 多功能综合一体化技术发展综述[J]. 航天电子对抗, 2020, 36(3): 1–10. doi: 10.16328/j.htdz8511.2020.03.001.ZHU Weiqiang, WANG Kerang, XU Huajian, et al. Development of multifunctional integration technology[J]. Aerospace Electronic Warfare, 2020, 36(3): 1–10. doi: 10.16328/j.htdz8511.2020.03.001. [27] GUPTA D, KIRICHENKO D E, DOTSENKO V V, et al. Modular, multi-function digital-RF receiver systems[J]. IEEE Transactions on Applied Superconductivity, 2011, 21(3): 883–890. doi: 10.1109/TASC.2010.2095399. [28] FILIP A and SHUTIN D. Cramér-Rao bounds for L-band digital aeronautical communication system type 1 based passive multiple-input multiple-output radar[J]. IET Radar, Sonar & Navigation, 2016, 10(2): 348–358. doi: 10.1049/iet-rsn.2015.0202. [29] FIORANELLI F, LE KERNEC J, and SHAH S A. Radar for health care: Recognizing human activities and monitoring vital signs[J]. IEEE Potentials, 2019, 38(4): 16–23. doi: 10.1109/MPOT.2019.2906977. [30] ORLANDO V A. The mode S beacon radar system[J]. The Lincoln Laboratory Journal, 1989, 2(3): 345–362. [31] HUANG Yuhong. Challenges and opportunities of sub-6 GHz integrated sensing and communications for 5G-Advanced and beyond[J]. Chinese Journal of Electronics, 2024, 33(2): 323–325. doi: 10.23919/cje.2023.00.251. [32] STROHMEIER M, SCHÄFER M, LENDERS V, et al. Realities and challenges of nextgen air traffic management: The case of ADS-B[J]. IEEE Communications Magazine, 2014, 52(5): 111–118. doi: 10.1109/MCOM.2014.6815901. [33] 王飞, 于超鹏, 熊伟. 面向机载综合监视系统的ADS-B技术综述[J]. 航空工程进展, 2024, 15(2): 142–151. doi: 10.16615/j.cnki.1674-8190.2024.02.16.WANG Fei, YU Chaopeng, and XIONG Wei. ADS-B technology overview for the airborne integrated surveillance system[J]. Advances in Aeronautical Science and Engineering, 2024, 15(2): 142–151. doi: 10.16615/j.cnki.1674-8190.2024.02.16. [34] FORTINO G and PATHAN M. Integration of cloud computing and body sensor networks[J]. Future Generation Computer Systems, 2014, 35: 57–61. doi: 10.1016/j.future.2014.02.001. [35] JIANG Xikang, ZHANG Lin, and LI Lei. Multi-task learning radar transformer (MLRT): A personal identification and fall detection network based on IR-UWB radar[J]. Sensors, 2023, 23(12): 5632. doi: 10.3390/s23125632. [36] SLIZOV V and ANISHCHENKO L. Evaluating the effectiveness of using the 4-radar system for the contactless fall detection[C]. 2022 Ural-Siberian Conference on Biomedical Engineering, Radioelectronics and Information Technology, Yekaterinburg, Russian Federation, 2022: 048–051. doi: 10.1109/USBEREIT56278.2022.9923404. [37] HIEU N Q, HOANG D T, NIYATO D, et al. Transferable deep reinforcement learning framework for autonomous vehicles with joint radar-data communications[J]. IEEE Transactions on Communications, 2022, 70(8): 5164–5180. doi: 10.1109/TCOMM.2022.3182034. [38] YAO Yu, ZHAO Junhui, LI Zeqing, et al. Jamming and eavesdropping defense scheme based on deep reinforcement learning in autonomous vehicle networks[J]. IEEE Transactions on Information Forensics and Security, 2023, 18: 1211–1224. doi: 10.1109/TIFS.2023.3236788. [39] KHAWAR A, ABDELHADI A, and CLANCY C. Target detection performance of spectrum sharing MIMO radars[J]. IEEE Sensors Journal, 2015, 15(9): 4928–4940. doi: 10.1109/JSEN.2015.2424393. [40] XIAO Zhiqiang and ZENG Yong. Waveform design and performance analysis for full-duplex integrated sensing and communication[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(6): 1823–1837. doi: 10.1109/JSAC.2022.3155509. [41] 刘凡, 袁伟杰, 原进宏, 等. 雷达通信频谱共享及一体化: 综述与展望[J]. 雷达学报, 2021, 10(3): 467–484. doi: 10.12000/JR20113.LIU Fan, YUAN Weijie, YUAN Jinhong, et al. Radar-communication spectrum sharing and integration: Overview and prospect[J]. Journal of Radars, 2021, 10(3): 467–484. doi: 10.12000/JR20113. [42] GUERRA A, GUIDI F, DARDARI D, et al. Reinforcement learning for UAV autonomous navigation, mapping and target detection[C]. 2020 IEEE/ION Position, Location and Navigation Symposium, Portland, USA, 2020: 1004–1013. doi: 10.1109/PLANS46316.2020.9110163. [43] LUONG N C, LU Xiao, HOANG D T, et al. Radio resource management in joint radar and communication: A comprehensive survey[J]. IEEE Communications Surveys & Tutorials, 2021, 23(2): 780–814. doi: 10.1109/COMST.2021.3070399. [44] QIAN Junhui, LOPS M, ZHENG Le, et al. Joint system design for coexistence of MIMO radar and MIMO communication[J]. IEEE Transactions on Signal Processing, 2018, 66(13): 3504–3519. doi: 10.1109/TSP.2018.2831624. [45] GRIFFITHS H, COHEN L, WATTS S, et al. Radar spectrum engineering and management: Technical and regulatory issues[J]. Proceedings of the IEEE, 2015, 103(1): 85–102. doi: 10.1109/JPROC.2014.2365517. [46] MA O, CHIRIYATH A R, HERSCHFELT A, et al. Cooperative radar and communications coexistence using reinforcement learning[C]. 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, USA, 2018: 947–951. doi: 10.1109/ACSSC.2018.8645080. [47] FARSAD N and GOLDSMITH A. Neural network detection of data sequences in communication systems[J]. IEEE Transactions on Signal Processing, 2018, 66(21): 5663–5678. doi: 10.1109/TSP.2018.2868322. [48] HE Hengtao, WEN Chaokai, JIN Shi, et al. A model-driven deep learning network for MIMO detection[C]. 2018 IEEE Global Conference on Signal and Information Processing, Anaheim, USA, 2018: 584–588. doi: 10.1109/GlobalSIP.2018.8646357. [49] GUO Xianzhen, SHI Qin, LIU Liang, et al. User-assisted networked sensing in OFDM cellular network with erroneous anchor position information[C]. 2024 IEEE International Conference on Acoustics, Speech and Signal Processing, Seoul, Korea, 2024: 8556–8560. doi: 10.1109/ICASSP48485.2024.10445920. [50] ROBERTON M and BROWN E R. Integrated radar and communications based on chirped spread-spectrum techniques[C]. IEEE MTT-S International Microwave Symposium Digest, Philadelphia, USA, 2003: 611–614. doi: 10.1109/MWSYM.2003.1211013. [51] HASSANIEN A, HIMED B, and RIGLING B D. A dual-function MIMO radar-communications system using frequency-hopping waveforms[C]. 2017 IEEE Radar Conference, Seattle, USA, 2017: 1721–1725. doi: 10.1109/RADAR.2017.7944485. [52] LV Xin, WANG Jinqi, JIANG Zhisheng, et al. A joint radar-communication system based on OCDM-OFDM scheme[C]. 2018 International Conference on Microwave and Millimeter Wave Technology, Chengdu, China, 2018: 1–3. doi: 10.1109/ICMMT.2018.8563361. [53] GAUDIO L, KOBAYASHI M, BISSINGER B, et al. Performance analysis of joint radar and communication using OFDM and OTFS[C]. 2019 IEEE International Conference on Communications Workshops, Shanghai, China, 2019: 1–6. doi: 10.1109/ICCW.2019.8757044. [54] WEN C K, SHIH W T, and JIN Shi. Deep learning for massive MIMO CSI feedback[J]. IEEE Wireless Communications Letters, 2018, 7(5): 748–751. doi: 10.1109/LWC.2018.2818160. [55] KUMARI P, GONZALEZ-PRELCIC N, and HEATH R W. Investigating the IEEE 802.11 ad standard for millimeter wave automotive radar[C]. 2015 IEEE 82nd Vehicular Technology Conference, Boston, USA, 2015: 1–5. doi: 10.1109/VTCFall.2015.7390996. [56] CHIRIYATH A R, PAUL B, and BLISS D W. Radar-communications convergence: Coexistence, cooperation, and co-design[J]. IEEE Transactions on Cognitive Communications and Networking, 2017, 3(1): 1–12. doi: 10.1109/TCCN.2017.2666266. [57] LI Bo, PETROPULU A P, and TRAPPE W. Optimum co-design for spectrum sharing between matrix completion based MIMO radars and a MIMO communication system[J]. IEEE Transactions on Signal Processing, 2016, 64(17): 4562–4575. doi: 10.1109/TSP.2016.2569479. [58] PULKKINEN P and KOIVUNEN V. Model-based online learning for resource sharing in joint radar-communication systems[C]. 2022 IEEE International Conference on Acoustics, Speech and Signal Processing, Singapore, Singapore, 2022: 4103–4107. doi: 10.1109/ICASSP43922.2022.9747269. [59] SELVI E, BUEHRER R M, MARTONE A, et al. Reinforcement learning for adaptable bandwidth tracking radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(5): 3904–3921. doi: 10.1109/TAES.2020.2987443. [60] THORNTON C E, KOZY M A, BUEHRER R M, et al. Deep reinforcement learning control for radar detection and tracking in congested spectral environments[J]. IEEE Transactions on Cognitive Communications and Networking, 2020, 6(4): 1335–1349. doi: 10.1109/TCCN.2020.3019605. [61] THORNTON C E, BUEHRER R M, MARTONE A F, et al. Experimental analysis of reinforcement learning techniques for spectrum sharing radar[C]. 2020 IEEE International Radar Conference, Washington, USA, 2020: 67–72. doi: 10.1109/RADAR42522.2020.9114698. [62] ZHENG Le, LOPS M, and WANG Xiaodong. Adaptive interference removal for uncoordinated radar/communication coexistence[J]. IEEE Journal of Selected Topics in Signal Processing, 2018, 12(1): 45–60. doi: 10.1109/JSTSP.2017.2785783. [63] LIU Fan, MASOUROS C, LI Ang, et al. MIMO radar and cellular coexistence: A power-efficient approach enabled by interference exploitation[J]. IEEE Transactions on Signal Processing, 2018, 66(14): 3681–3695. doi: 10.1109/TSP.2018.2833813. [64] VAN HUYNH N, NGUYEN D N, HOANG D T, et al. “Jam me if you can:” Defeating jammer with deep dueling neural network architecture and ambient backscattering augmented communications[J]. IEEE Journal on Selected Areas in Communications, 2019, 37(11): 2603–2620. doi: 10.1109/JSAC.2019.2933889. [65] SHAN Zhao, LIU Pengfei, WANG Lei, et al. A cognitive multi-carrier radar for communication interference avoidance via deep reinforcement learning[J]. IEEE Transactions on Cognitive Communications and Networking, 2023, 9(6): 1561–1578. doi: 10.1109/TCCN.2023.3306854. [66] OTTER D W, MEDINA J R, and KALITA J K. A survey of the usages of deep learning for natural language processing[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(2): 604–624. doi: 10.1109/TNNLS.2020.2979670. [67] HE Hengtao, WEN Chaokai, JIN Shi, et al. Model-driven deep learning for MIMO detection[J]. IEEE Transactions on Signal Processing, 2020, 68: 1702–1715. doi: 10.1109/TSP.2020.2976585. [68] HUYNH-THE T, PHAM Q V, NGUYEN T V, et al. Deep learning for coexistence radar-communication waveform recognition[C]. 2021 International Conference on Information and Communication Technology Convergence, Jeju Island, Korea, 2021: 1725–1727. doi: 10.1109/ICTC52510.2021.9620950. [69] LIU Chenguang, CHEN Yunfei, and YANG Shuanghua. Deep learning based detection for communications systems with radar interference[J]. IEEE Transactions on Vehicular Technology, 2022, 71(6): 6245–6254. doi: 10.1109/TVT.2022.3158692. [70] JIANG Wangjun, MA Dingyou, WEI Zhiqing, et al. ISAC-NET: Model-driven deep learning for integrated passive sensing and communication[J]. IEEE Transactions on Communications, 2024, 72(8): 4692–4707. doi: 10.1109/TCOMM.2024.3375818. [71] WU Yongzhi, LEMIC F, HAN Chong, et al. Sensing integrated DFT-spread OFDM waveform and deep learning-powered receiver design for terahertz integrated sensing and communication systems[J]. IEEE Transactions on Communications, 2023, 71(1): 595–610. doi: 10.1109/TCOMM.2022.3225920. [72] RAVITEJA P, HONG Y, VITERBO E, et al. Effective diversity of OTFS modulation[J]. IEEE Wireless Communications Letters, 2020, 9(2): 249–253. doi: 10.1109/LWC.2019.2951758. [73] O’SHEA T and HOYDIS J. An introduction to deep learning for the physical layer[J]. IEEE Transactions on Cognitive Communications and Networking, 2017, 3(4): 563–575. doi: 10.1109/TCCN.2017.2758370. [74] ZHU Zhengyu, GONG Mengfei, SUN Gangcan, et al. AI-enabled STAR-RIS aided MISO ISAC secure communications[J]. Tsinghua Science and Technology, 2025, 30(3): 998–1011. doi: 10.26599/TST.2024.9010086. [75] XU Jiarui, JERE S, SONG Yifei, et al. Learning at the speed of wireless: Online real-time learning for AI-enabled MIMO in NextG[J]. IEEE Communications Magazine, 2025, 63(1): 92–98. doi: 10.1109/MCOM.001.2300529. [76] ELBIR A M and MISHRA K V. Deep learning design for joint antenna selection and hybrid beamforming in massive MIMO[C]. 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, USA, 2019: 1585–1586. doi: 10.1109/APUSNCURSINRSM.2019.8888753. [77] YANG Ruming, ZHU Zhiming, ZHANG Jiexin, et al. Deep learning-based joint transmit beamforming for dual-functional radar-communication system[J]. IEEE Transactions on Wireless Communications, 2024, 23(10): 15198–15211. doi: 10.1109/TWC.2024.3427368. [78] LIANG Jiachao and HUANG Yongwei. Online learning network methods for a joint transmit waveform and receive beamforming design for a DFRC system[C]. 2023 IEEE Statistical Signal Processing Workshop, Hanoi, Vietnam, 2023: 482–486. doi: 10.1109/SSP53291.2023.10207956. [79] ZHAO Yifei, WANG Zixin, WANG Zhibin, et al. Learning to beamform for dual-functional MIMO radar-communication systems[C]. IEEE International Conference on Communications, Rome, Italy, 2023: 3572–3577. doi: 10.1109/ICC45041.2023.10279159. [80] YUAN Weijie, LIU Fan, MASOUROS C, et al. Bayesian predictive beamforming for vehicular networks: A low-overhead joint radar-communication approach[J]. IEEE Transactions on Wireless Communications, 2021, 20(3): 1442–1456. doi: 10.1109/TWC.2020.3033776. [81] LIU Chang, YUAN Weijie, LI Shuangyang, et al. Learning-based predictive beamforming for integrated sensing and communication in vehicular networks[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(8): 2317–2334. doi: 10.1109/JSAC.2022.3180803. [82] ZHAO Chonghao, WU Gang, and XIONG Wenhui. Decentralized multiagent reinforcement learning-based cooperative perception with dual-functional radar-communication V2V links[C]. 2023 IEEE International Conference on Communications Workshops, Rome, Italy, 2023: 1100–1105. doi: 10.1109/ICCWorkshops57953.2023.10283653. [83] CHOI J, VA V, GONZALEZ-PRELCIC N, et al. Millimeter-wave vehicular communication to support massive automotive sensing[J]. IEEE Communications Magazine, 2016, 54(12): 160–167. doi: 10.1109/MCOM.2016.1600071CM. [84] PULKKINEN P and KOIVUNEN V. Model-based online learning for joint radar-communication systems operating in dynamic interference[C]. The 30th European Signal Processing Conference, Belgrade, Serbia, 2022: 992–996. doi: 10.23919/EUSIPCO55093.2022.9909601. [85] GRONAUER S and DIEPOLD K. Multi-agent deep reinforcement learning: A survey[J]. Artificial Intelligence Review, 2022, 55(2): 895–943. doi: 10.1007/s10462-021-09996-w. [86] LEE J, CHENG Yanyu, NIYATO D, et al. Intelligent resource allocation in joint radar-communication with graph neural networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(10): 11120–11135. doi: 10.1109/TVT.2022.3187377. [87] SELVI E, BUEHRER R M, MARTONE A, et al. On the use of Markov decision processes in cognitive radar: An application to target tracking[C]. 2018 IEEE Radar Conference, Oklahoma City, USA, 2018: 537–542. doi: 10.1109/RADAR.2018.8378616. [88] ZHANG Xi and ZHU Qixuan. Federated learning based integrated sensing, communications, and powering over 6G massive-MIMO mobile networks[C]. IEEE Conference on Computer Communications Workshops, Vancouver, Canada, 2024: 1–6. doi: 10.1109/INFOCOMWKSHPS61880.2024.10620738. [89] CHU N H, HOANG D T, NGUYEN D N, et al. Joint speed control and energy replenishment optimization for UAV-assisted IoT data collection with deep reinforcement transfer learning[J]. IEEE Internet of Things Journal, 2023, 10(7): 5778–5793. doi: 10.1109/JIOT.2022.3151201. -

计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

