
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
HRT-Net: A Cell-free Cooperative Sensing Method Based on Attention-weighted Hierarchical Network
-
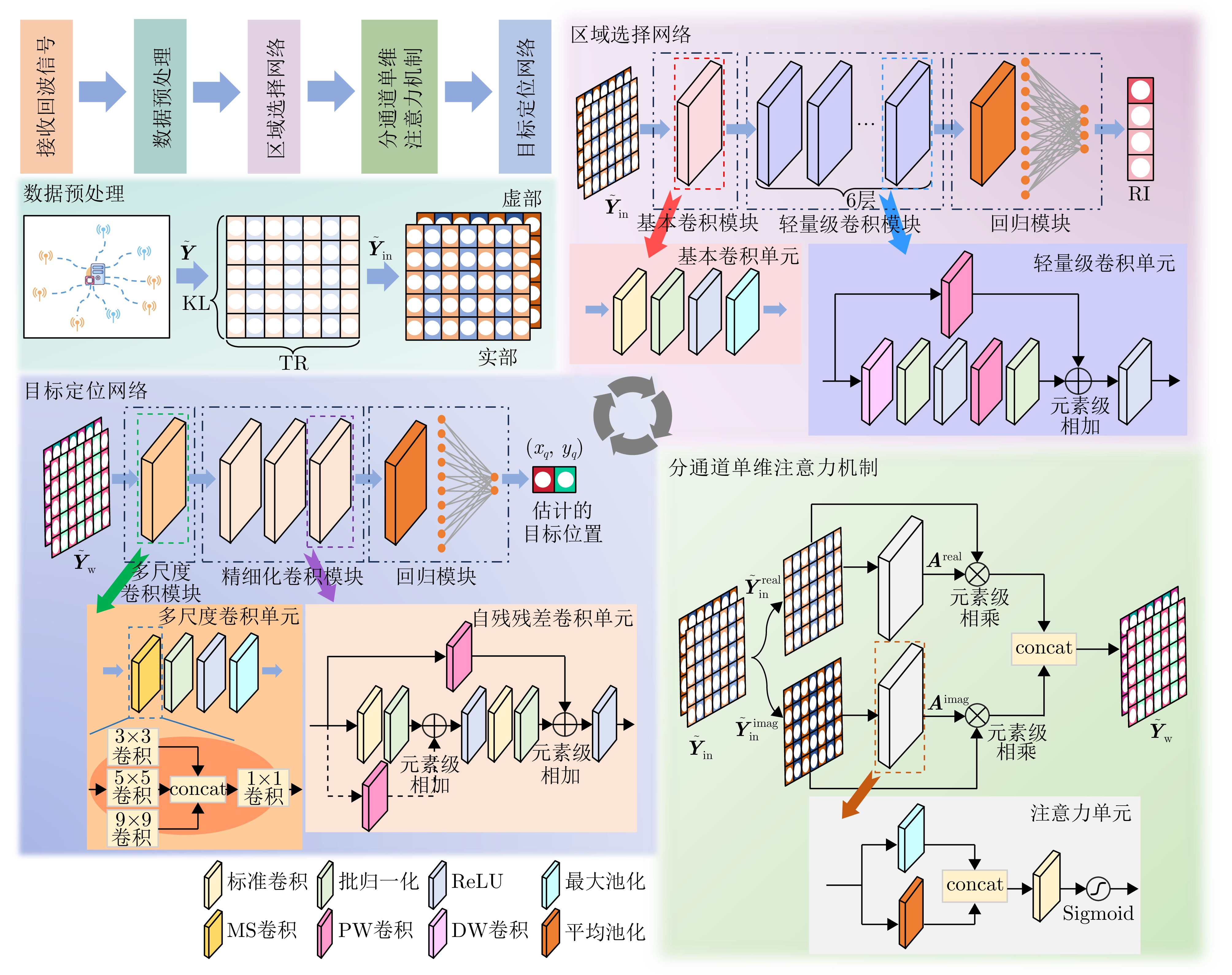
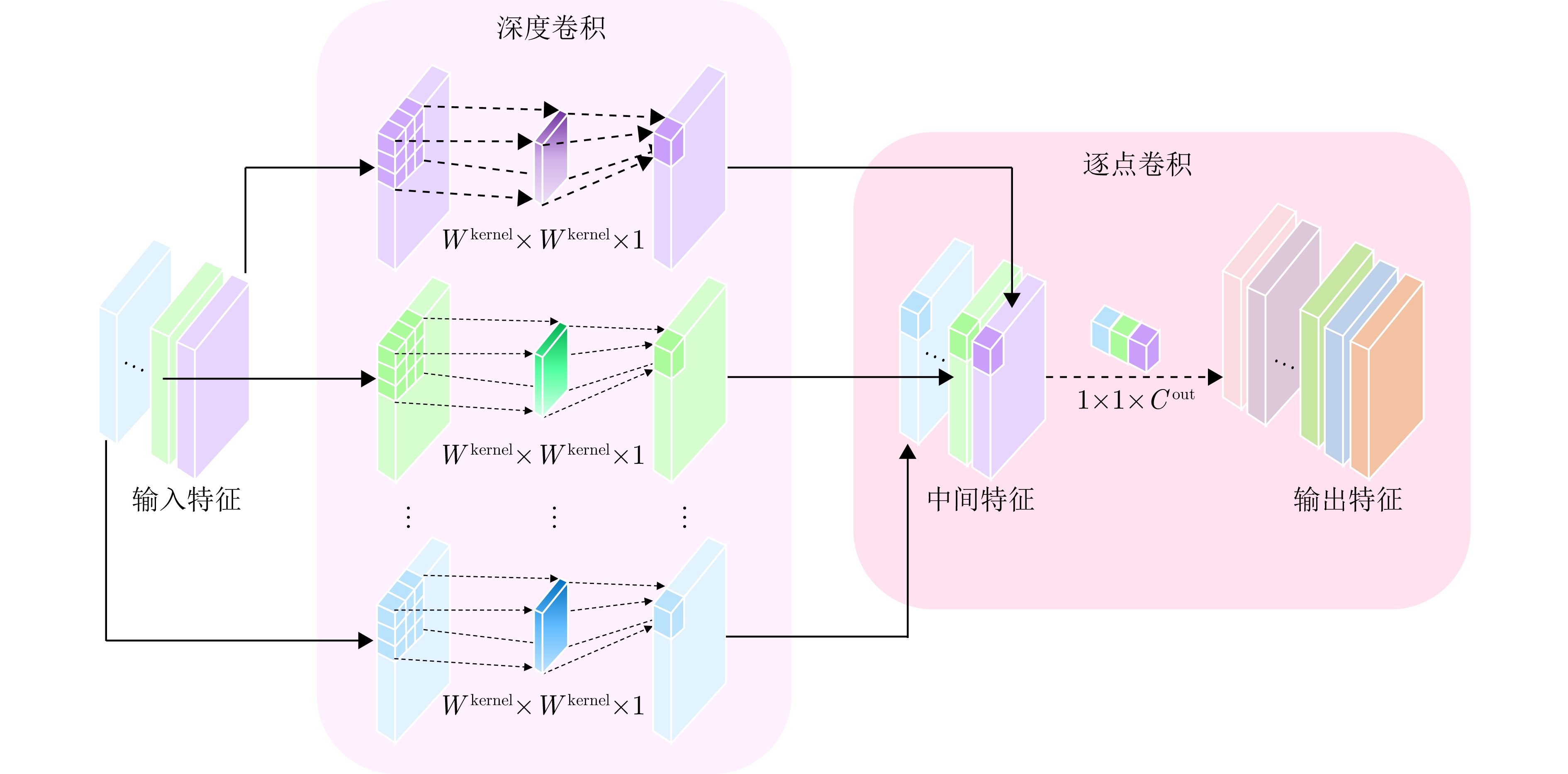
摘要: 该文针对雷达通信一体化系统中多站协作感知的问题,提出了一种基于无蜂窝网络架构的智能框架HRT-Net,用于实现准确且资源高效的位置估计。具体而言,该文首先将感知区域划分为多个子区域,并基于深度可分离卷积设计了一个轻量级的区域选择网络,以识别目标所属的子区域,从而减少计算负担并实现广域覆盖。其次,考虑到多站数据差异性的隐式问题,该文设计了一种分通道单维注意力机制,旨在有效聚合多站的感知数据并增强特征的提取和表示能力,从而生成注意力权重图以加权修正原始特征。最后,基于多尺度和多重残差连接设计了一个目标定位网络,该网络能够提取更加全面和深层的特征并实现多级特征融合,进而可靠地将其映射到目标的位置坐标。仿真及实测实验结果表明,相比于现有方法,HRT-Net在较低计算复杂度和存储开销下,能够实现厘米级的目标定位。Abstract: This paper proposes an intelligent framework based on a cell-free network architecture, called HRT-Net. HRT-Net is designed to enhance multi-station collaborative sensing problems for Dual-Functional Radar-Communication (DFRC) systems, offering accurate and resource-efficient target location estimation. First, the sensing area is divided into sub-regions and a lightweight region selection network employing depthwise separable convolution; this approach coarsely identifies the target’s sub-region, reducing computational demands and enabling extensive area coverage. To tackle interstation data disparity, we propose a channel-wise unidimensional attention mechanism. This mechanism aggregates multi-station sensing data effectively, enhancing feature extraction and representation by generating attention weight maps that refine the original features. Finally, we design a target localization network featuring multi-scale and multi-residual connections. This network extracts comprehensive, deep features and achieves multi-level feature fusion, allowing for reliable mapping of data to the target coordinates. Extensive simulations and real-world experiments validate the effectiveness and robustness of our scheme. The results show that compared with the existing methods, HRT-Net achieves centimeter-level target localization with low computational complexity and minimal storage overhead.
-
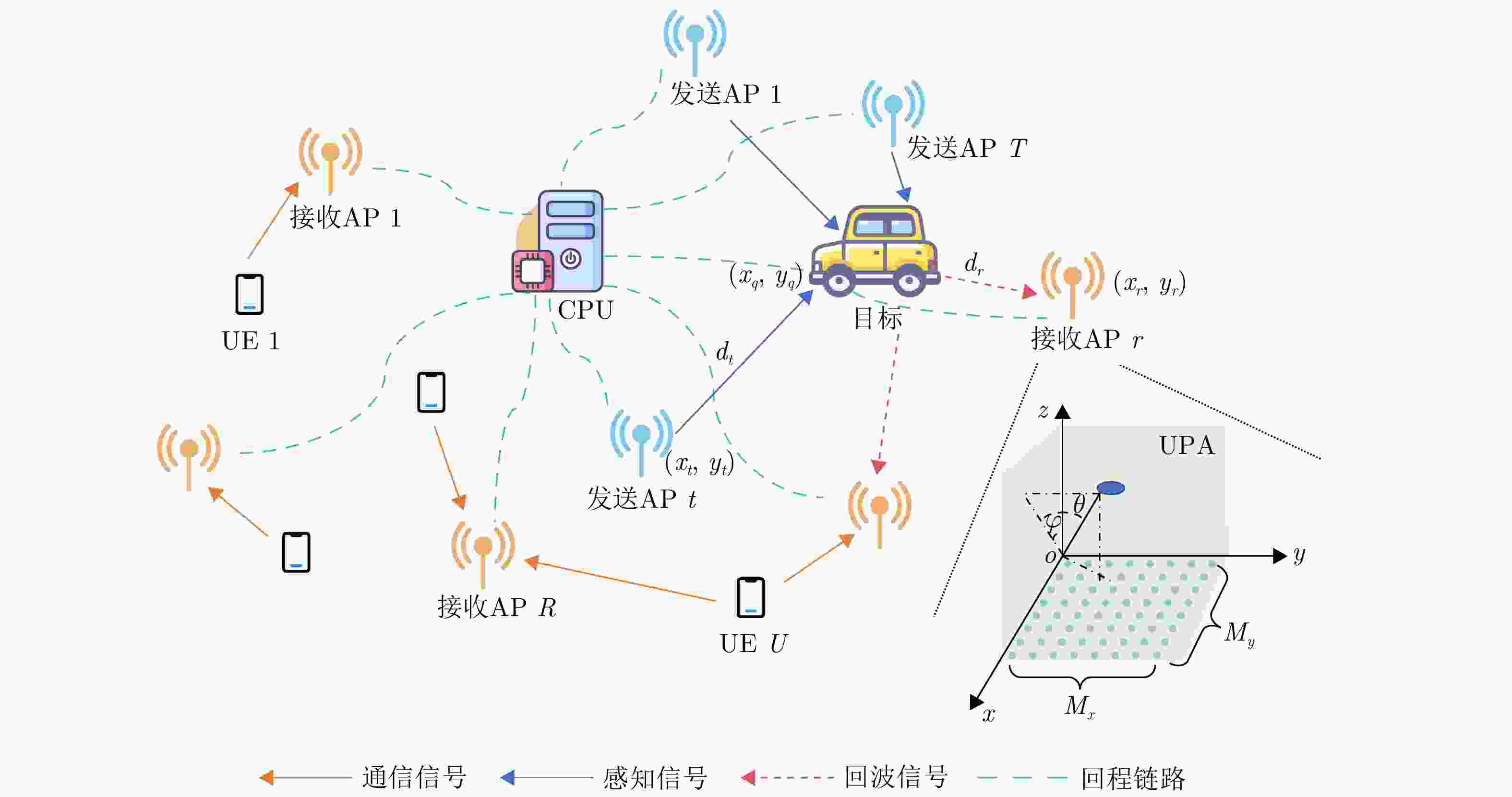
图 1 CF-mMIMO雷达通信一体化系统示意图
Figure 1. Schematic diagram of CF-mMIMO joint radar and communications system
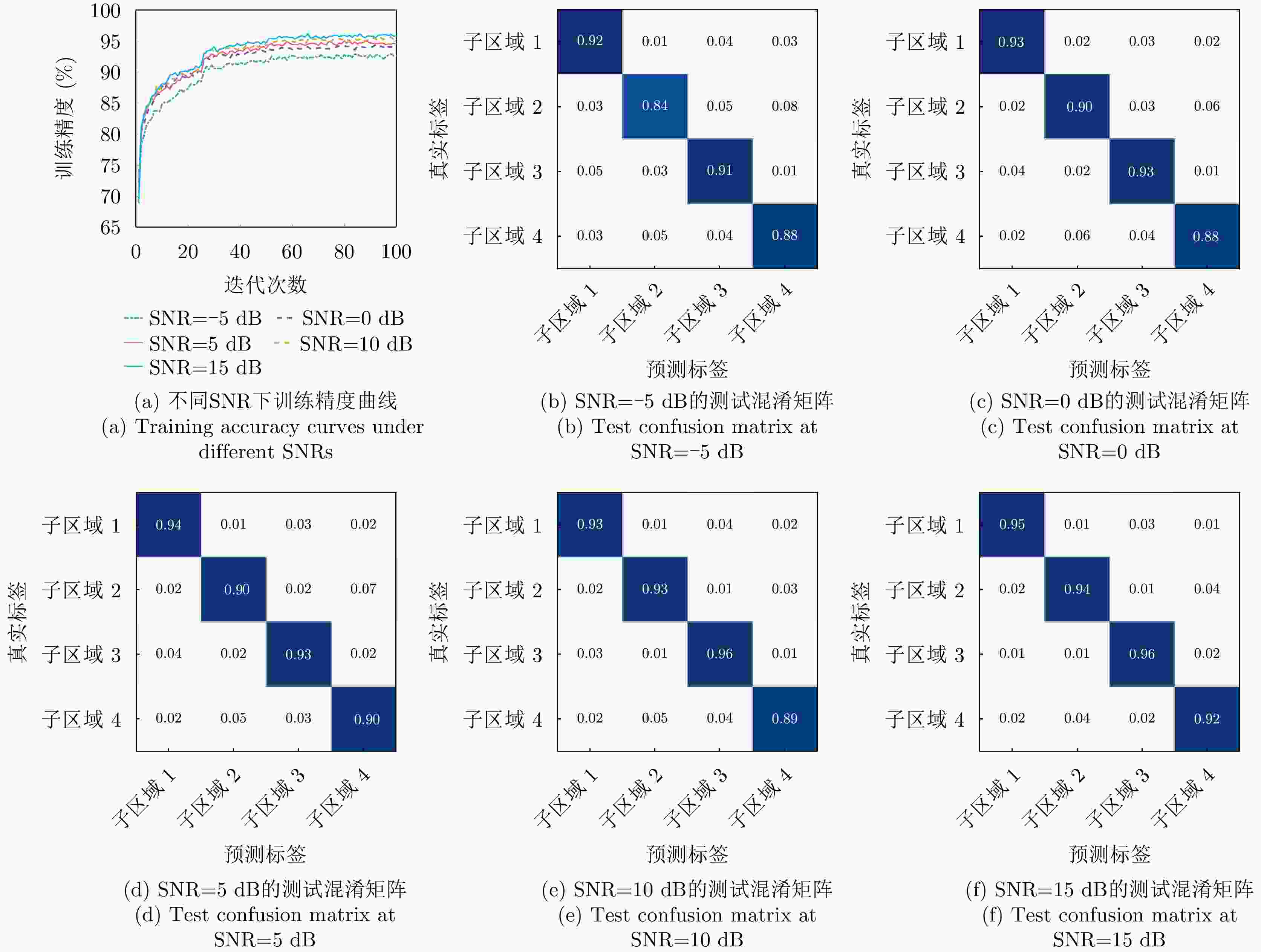
图 5 不同SNR下区域选择网络的性能对比
Figure 5. Performance comparison of region selection network under different SNRs
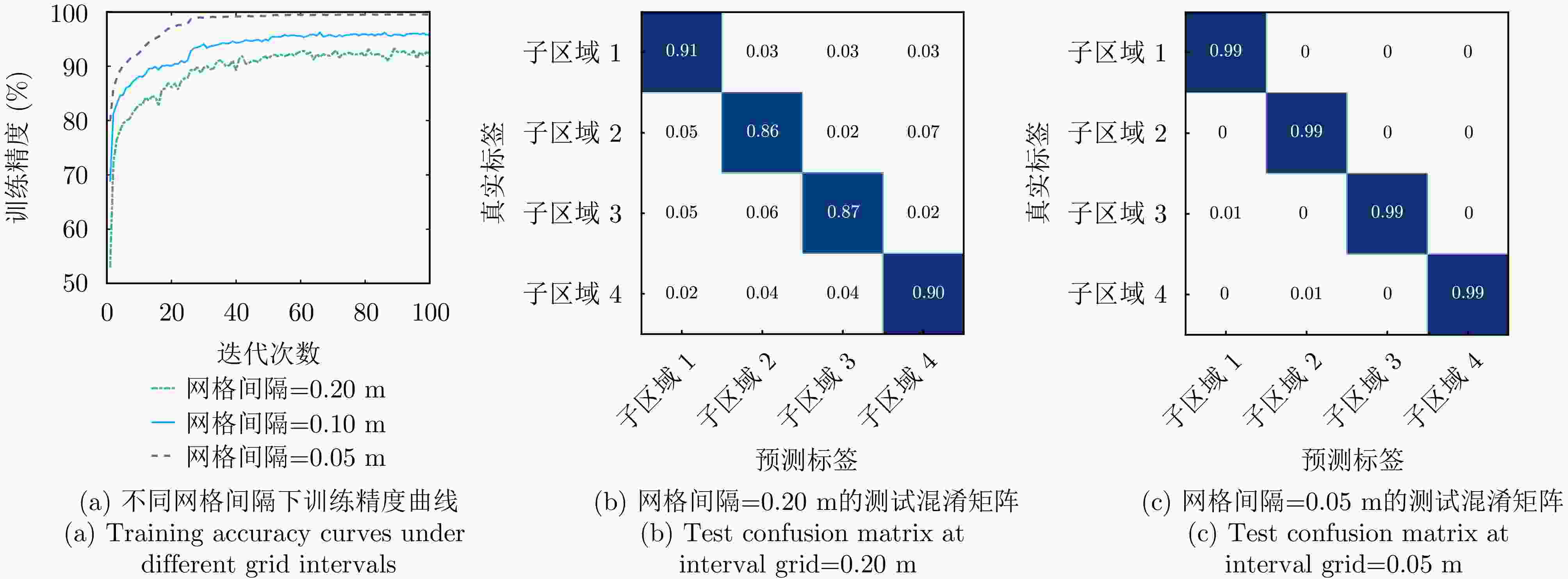
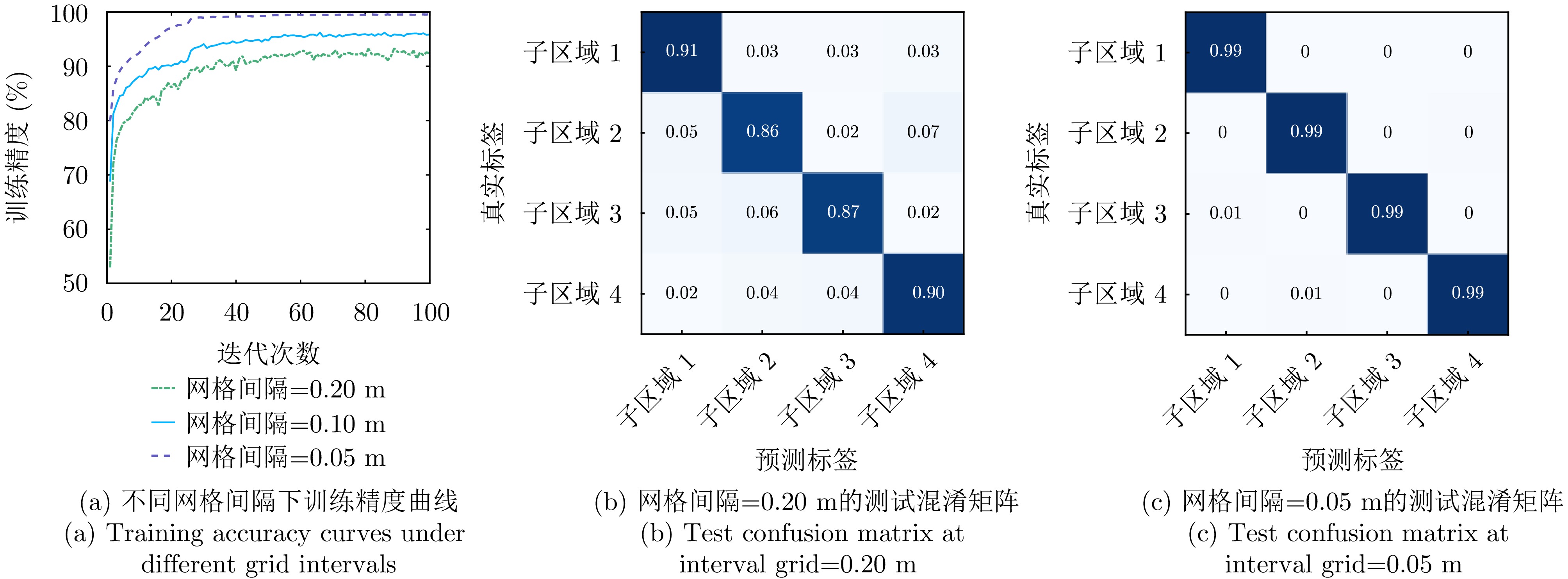
图 6 不同网格间隔下区域选择网络的性能对比
Figure 6. Performance comparison of region selection network under different grid intervals
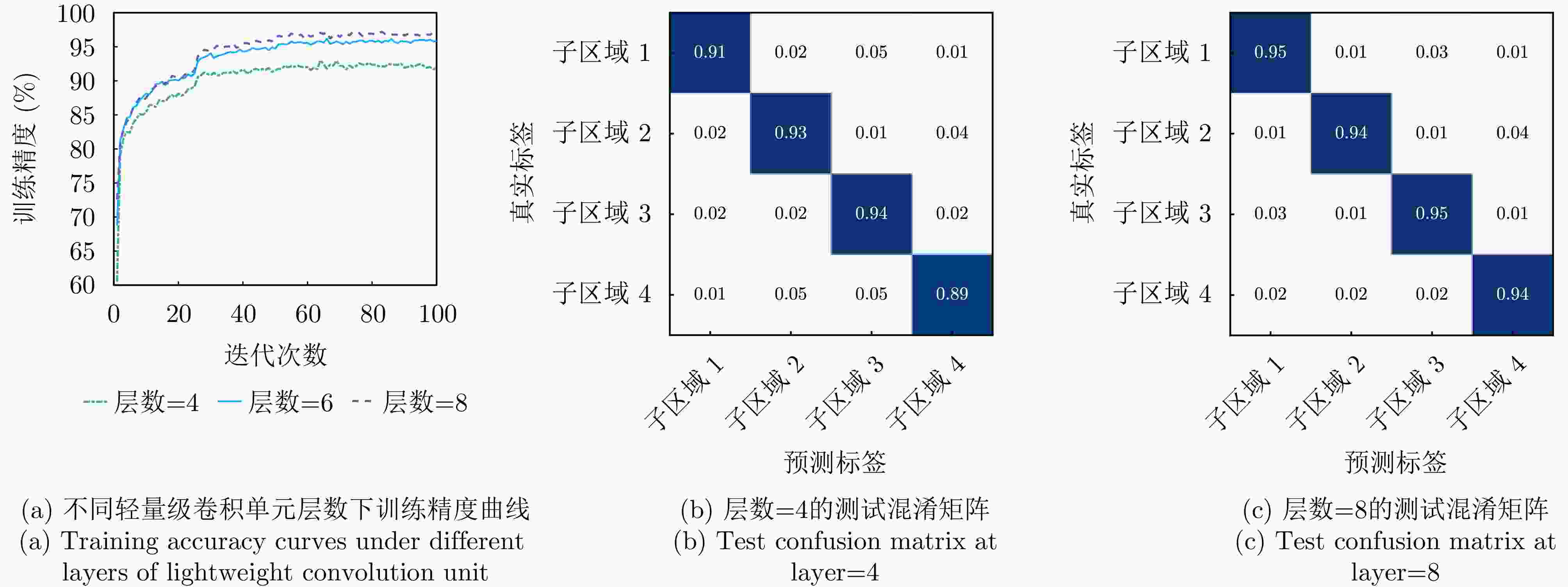
图 7 不同轻量级卷积单元层数下区域选择网络的性能对比
Figure 7. Performance comparison of region selection network under different layers of lightweight convolution unit
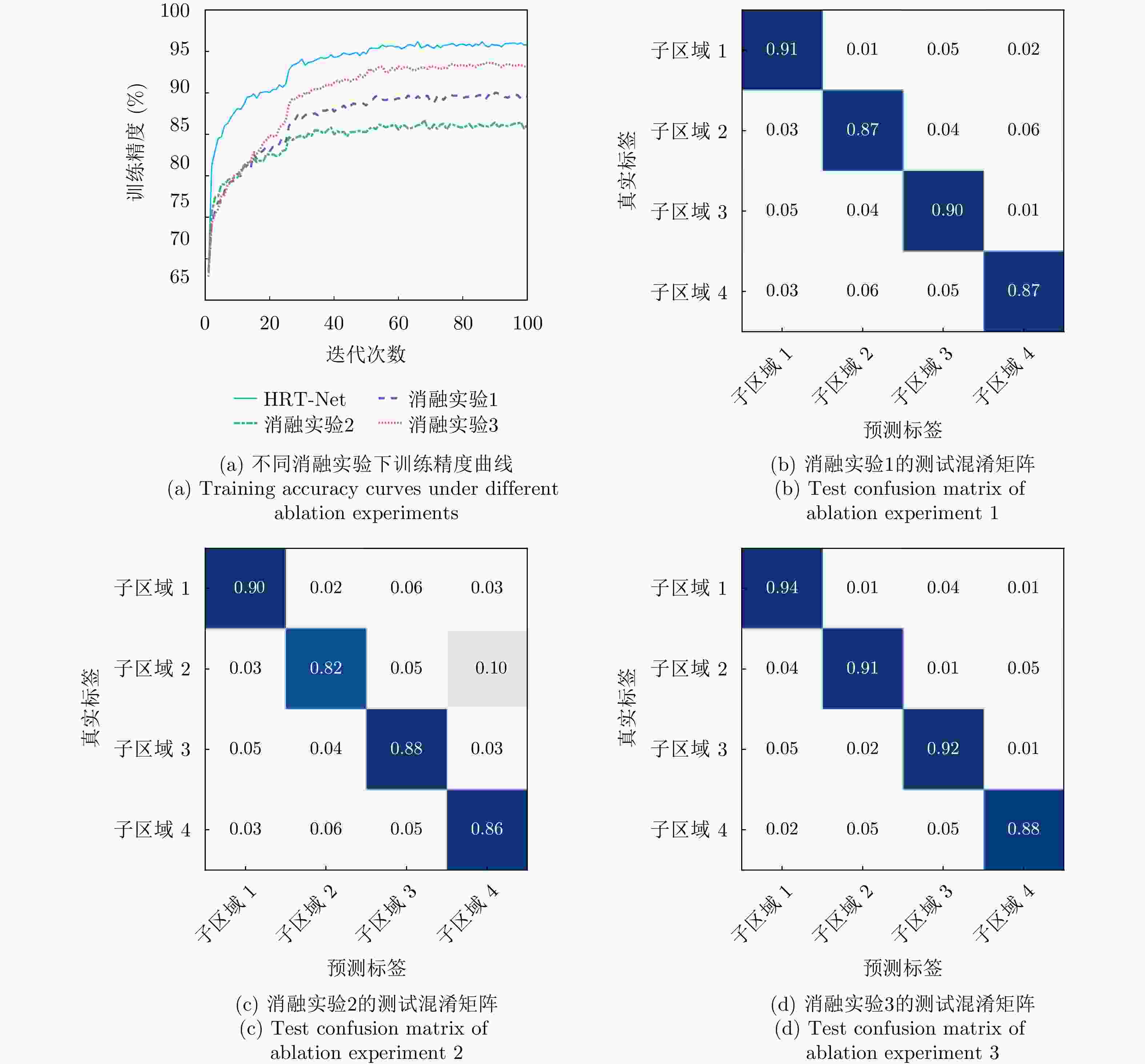
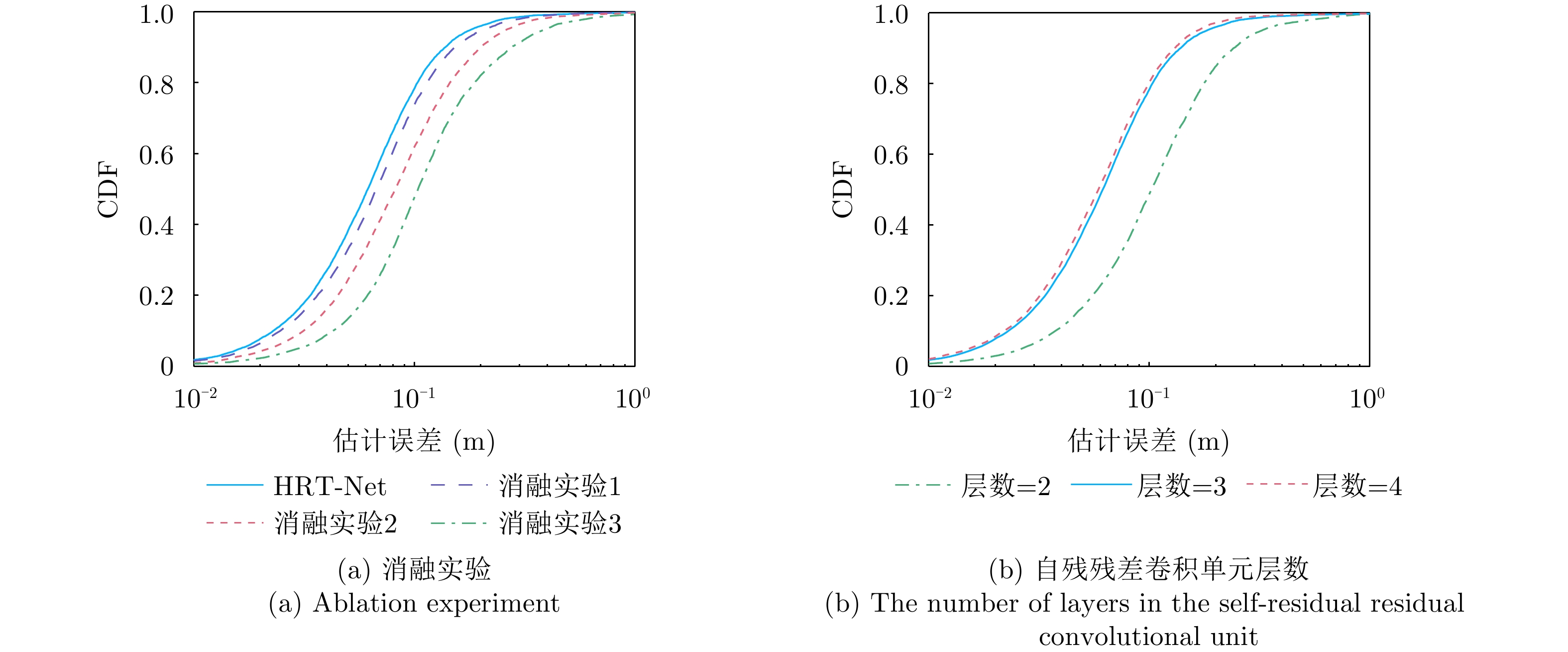
图 8 不同消融实验下区域选择网络的性能对比
Figure 8. Performance comparison of region selection network under different ablation experiments
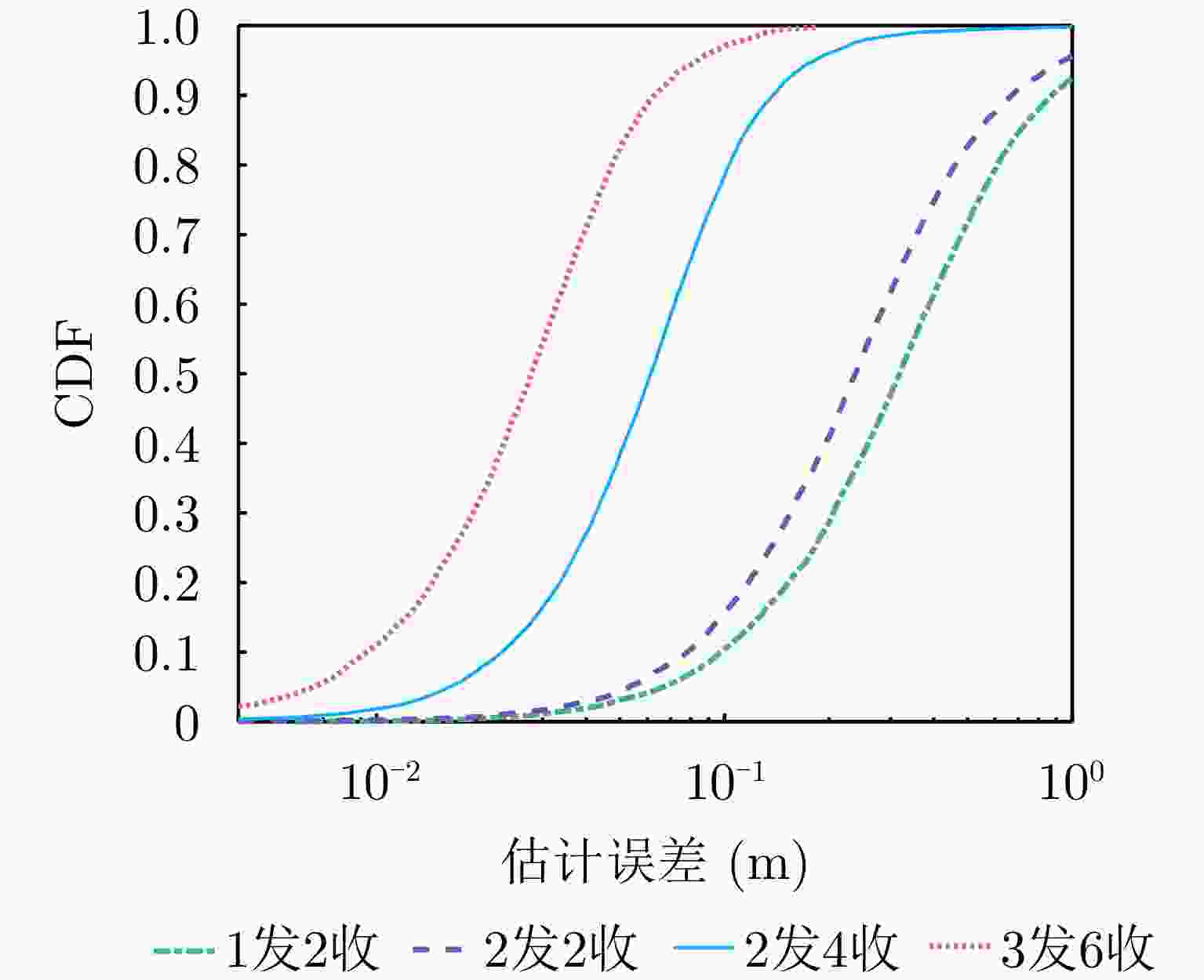
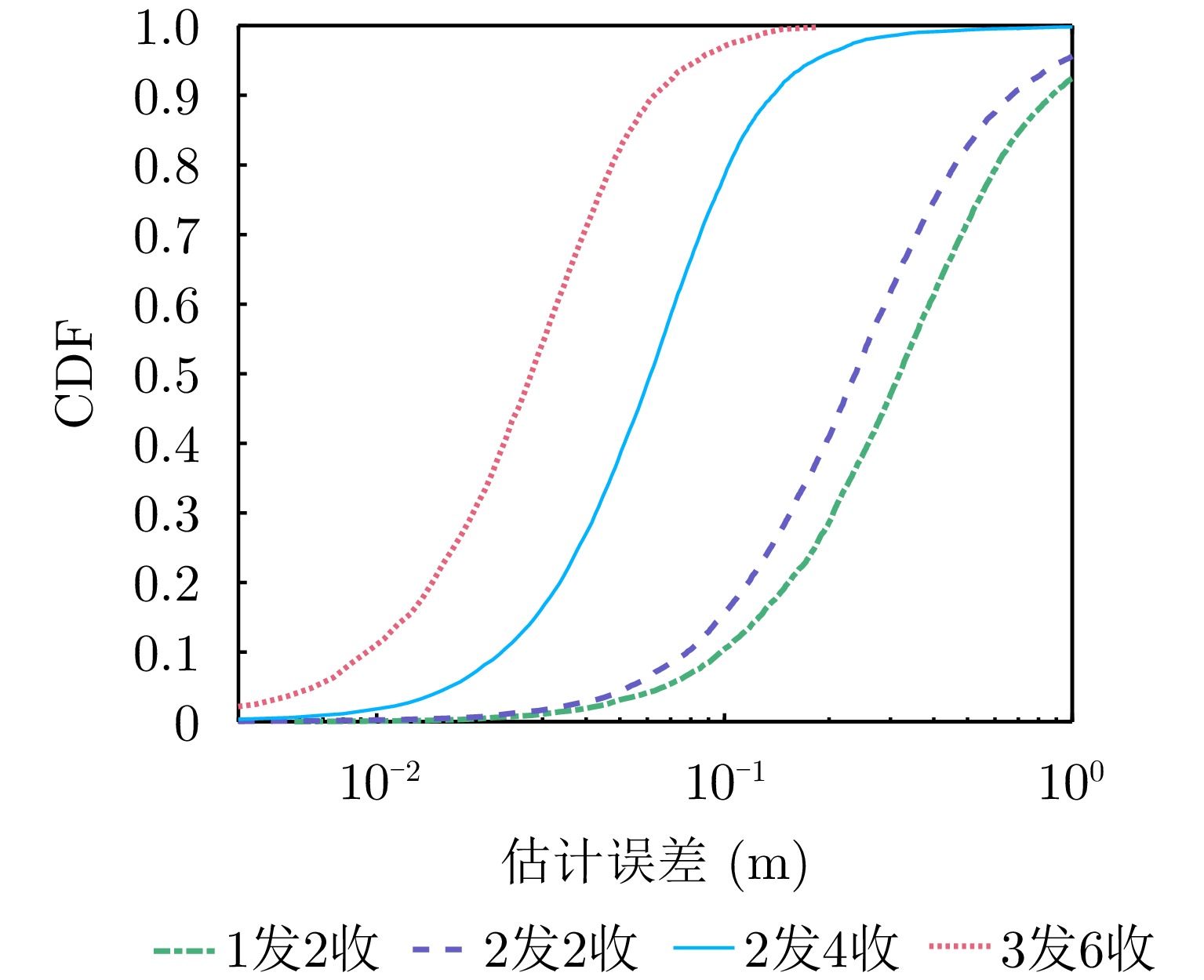
图 11 不同发送和接收AP数量下HRT-Net的精度对比
Figure 11. Accuracy comparison of HRT-Net under different numbers of transmitting and receiving APs
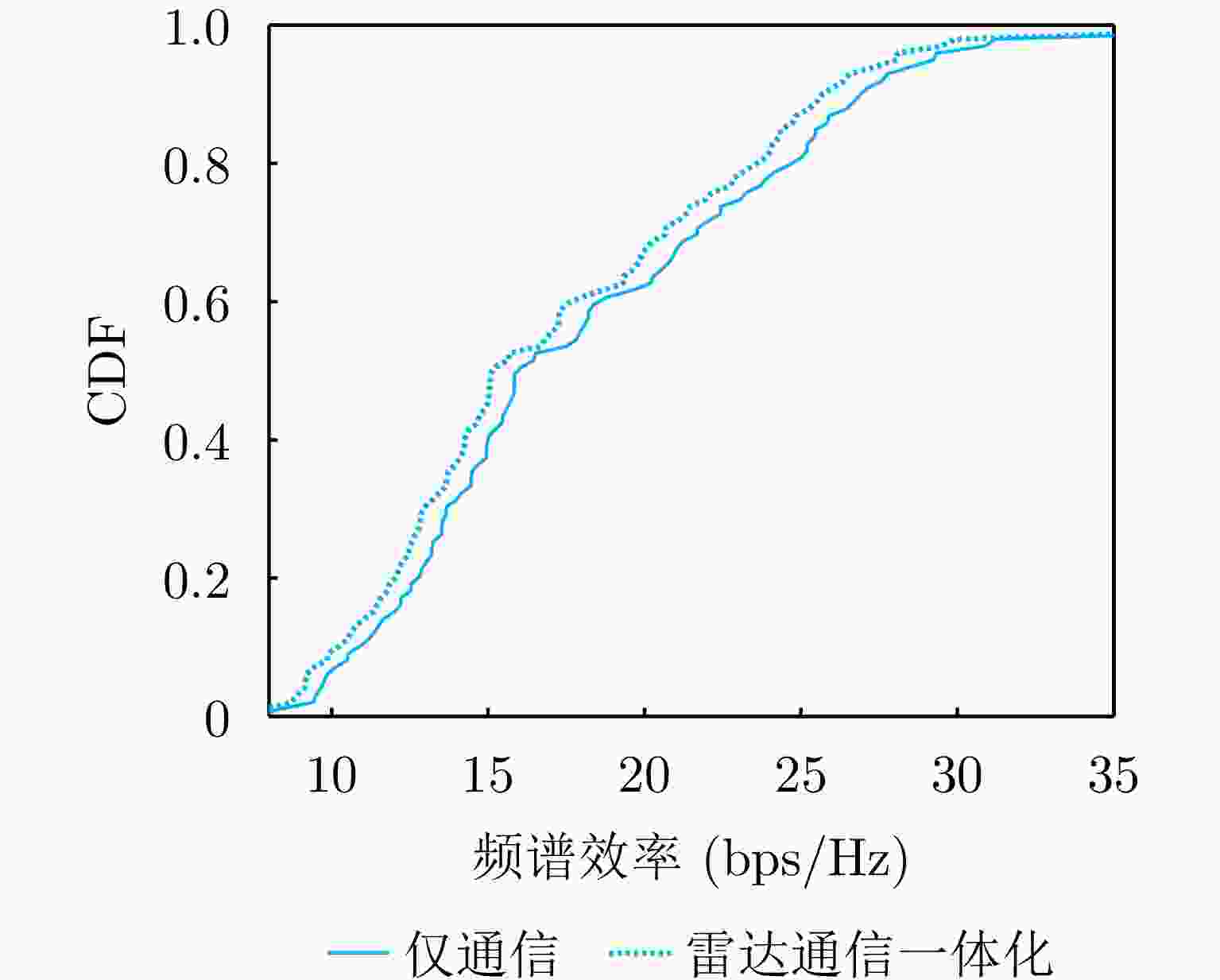
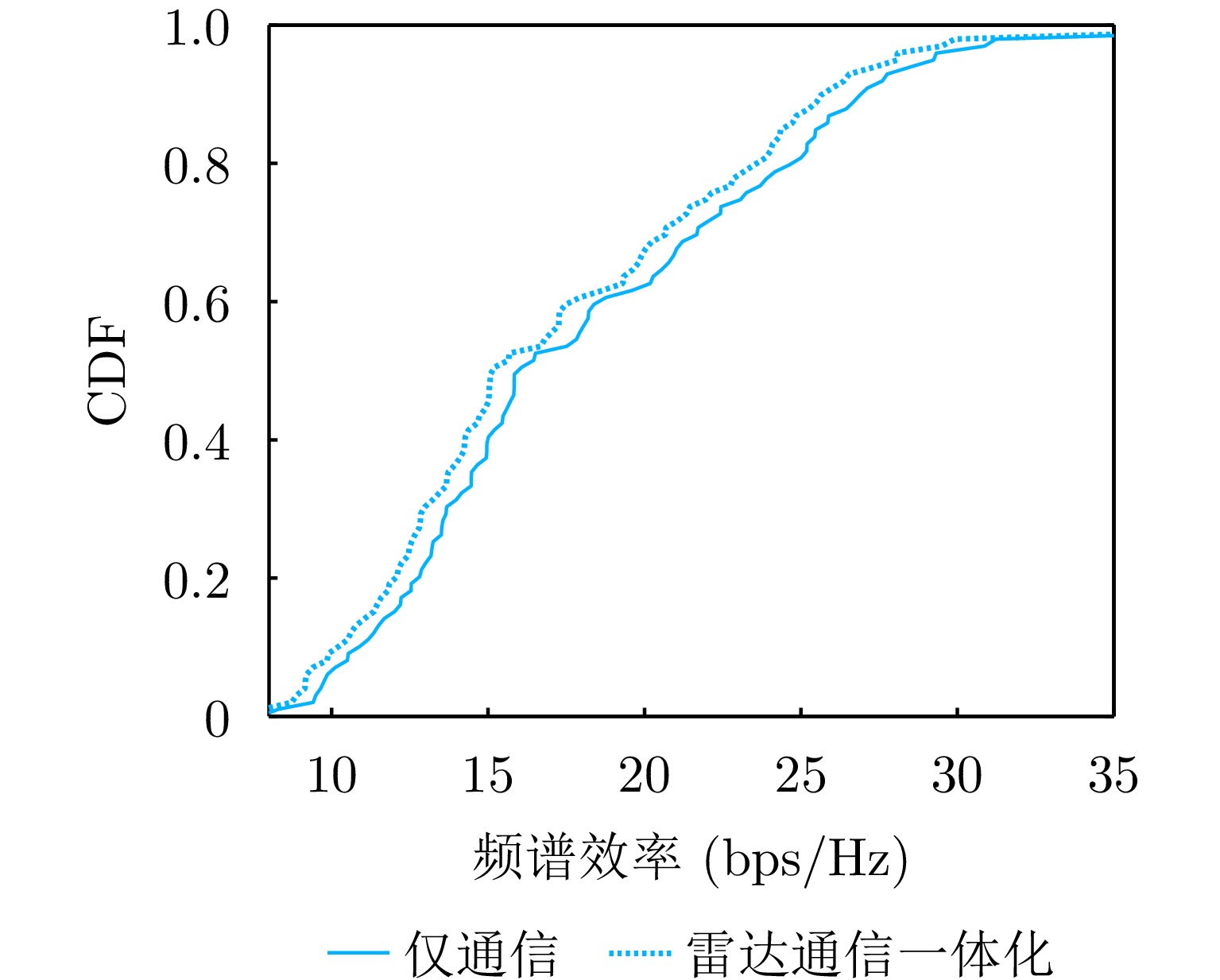
图 14 3%的通信资源占用率对频谱效率的影响
Figure 14. Influence of 3% communication resources occupancy on the sum spectral efficiency
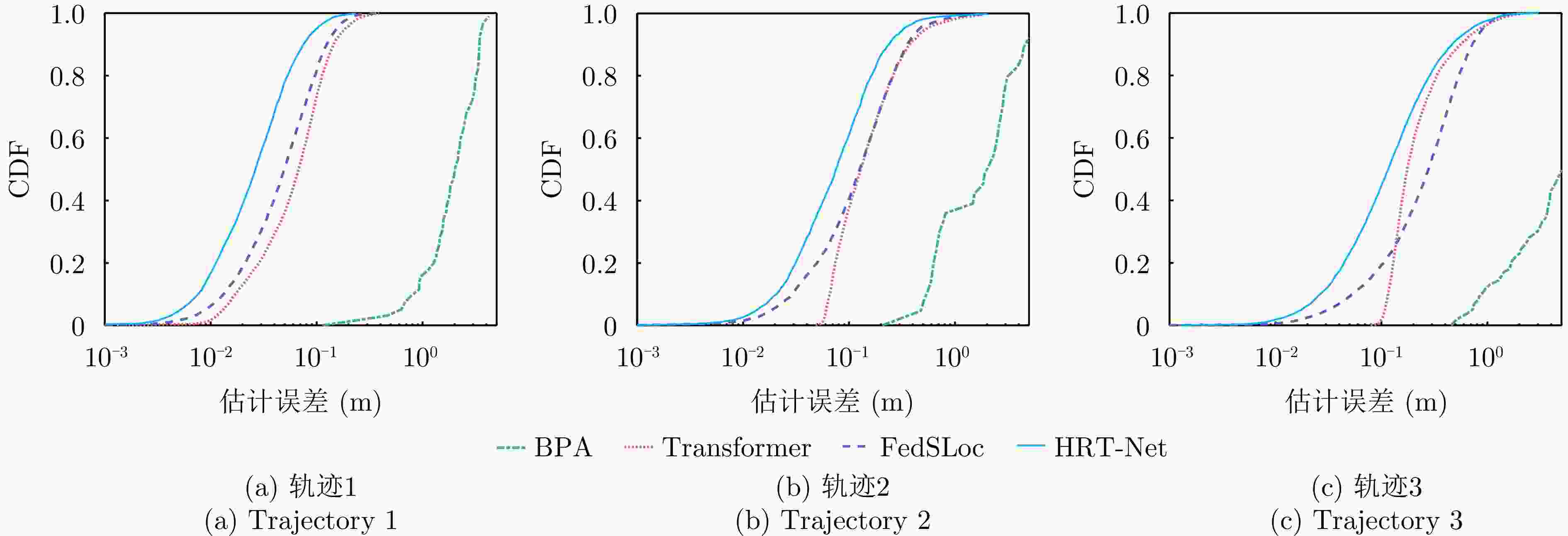
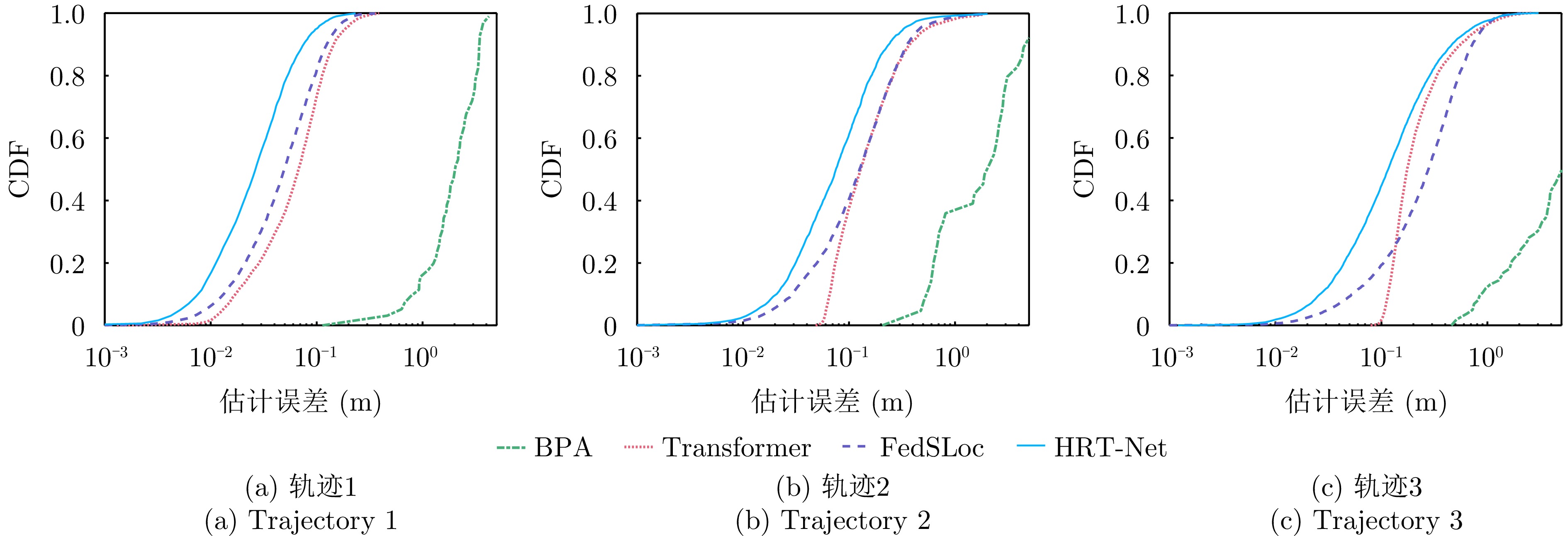
图 15 各轨迹在不同定位方法下的CDF
Figure 15. CDF of each trajectory under different localization methods
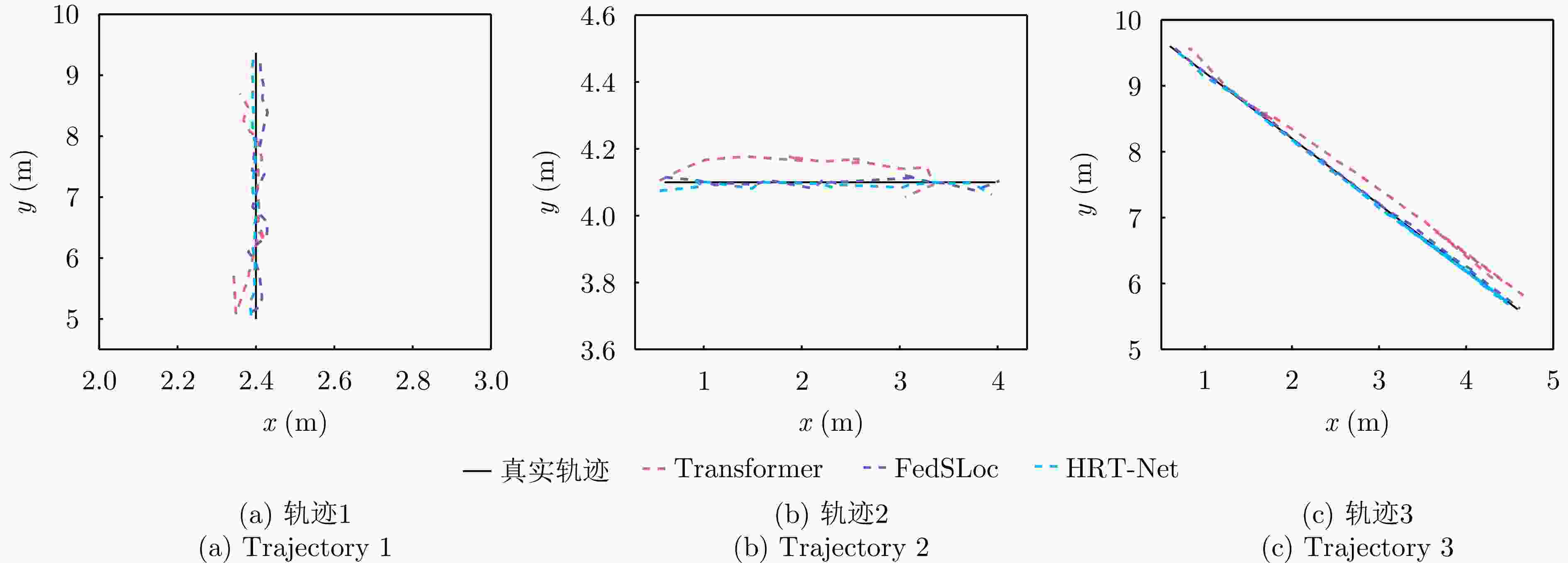
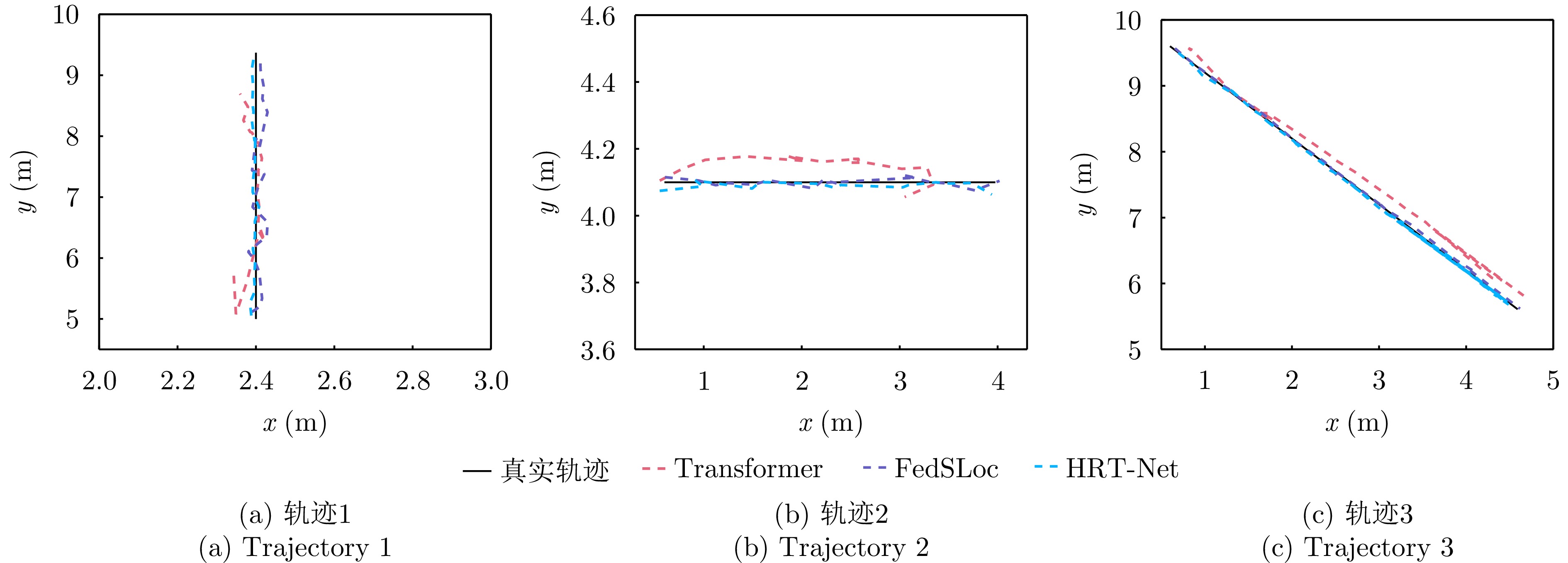
图 16 不同定位方法下的轨迹预测
Figure 16. Trajectory prediction under different localization methods
1 分通道单维注意力机制的计算流程
1. Calculation process of sub-channel single dimensional attention mechanism
输入:输入特征$ {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}} $ 输出:加权特征$ {\tilde {\boldsymbol{Y}}_{\mathrm{w}}} $ 初始化参数:$ {\bf{aw}}_{\max}^{{\mathrm{real}}} $, $ {\bf{aw}}_{\max}^{{\mathrm{imag}}} $, $ {\bf{aw}}_{{\mathrm{avg}}}^{{\mathrm{real}}} $, $ {\bf{aw}}_{{\mathrm{avg}}}^{{\mathrm{imag}}} $, $ {{\boldsymbol{A}}^{{\mathrm{real}}}} $, $ {{\boldsymbol{A}}^{{\mathrm{imag}}}} $,
$ \tilde {\boldsymbol{Y}}_{\mathrm{w}}^{{\mathrm{real}}} $, $ \tilde {\boldsymbol{Y}}_{\mathrm{w}}^{{\mathrm{imag}}} $1. for $ {\mathrm{ch}} = 1,2 $ //1和2分别代表实部和虚部 2. for $ {\mathrm{tr}} = 1,2, \cdots ,{\mathrm{TR}} $ 3. $ {\bf{aw}}_{\max}^{{\mathrm{ch}}}({\mathrm{tr}}) = \max\left( {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}^{{\mathrm{ch}}}(1:{\mathrm{KL}},{\mathrm{tr}})} \right) $ 4. $ {\bf{aw}}_{{\mathrm{avg}}}^{{\mathrm{ch}}}({\mathrm{tr}}) = \dfrac{1}{{{\mathrm{KL}}}}\displaystyle\sum\limits_{{\mathrm{kl}} = 1}^{{\mathrm{KL}}} {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}^{{\mathrm{ch}}}({\mathrm{kl}},{\mathrm{tr}})} $ 5. end 6. //$ {\mathrm{conv}} $函数和$ {\mathrm{expand}} $函数分别代表标准卷积操作和扩展维
度操作7. $ {{\boldsymbol{A}}^{{\mathrm{ch}}}} = {\mathrm{expand}}({\mathrm{sigmoid}}({\mathrm{conv}}({\mathrm{concat}}({\bf{aw}}_{\max }^{{\mathrm{ch}}},{\bf{aw}}_{{\mathrm{avg}}}^{{\mathrm{ch}}})))) $ 8. $ \tilde {\boldsymbol{Y}}_{\mathrm{w}}^{{\mathrm{ch}}} = {A^{{\mathrm{ch}}}} \odot \tilde {\boldsymbol{Y}}_{{\mathrm{in}}}^{{\mathrm{ch}}} $ //符号$ \odot $代表元素级相乘 9. end 10. $ {\tilde {\boldsymbol{Y}}_{\mathrm{w}}} = {\mathrm{concat}}(\tilde {\boldsymbol{Y}}_{\mathrm{w}}^{{\mathrm{real}}},\tilde {\boldsymbol{Y}}_{\mathrm{w}}^{{\mathrm{imag}}}) $  下载: 导出CSV
下载: 导出CSV
2 HRT-Net的实现过程
2. Implementation procedure of HRT-Net
数据预处理过程 1. 将总的区域划分成S个子区域 2. 收集每个子区域内的各个点位对应的接收信号矩阵$ \tilde {\boldsymbol{Y}} $和目标
位置坐标$ ({{x}_{q}},{{y}_{q}}) $3. 将接收信号矩阵$ \tilde {\boldsymbol{Y}} $的实部和虚部拆开,形成输入特征$ {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}} $,区
域选择网络和目标定位网络的标签分别为子区域索引RI和目标位置坐标$ ({{x}_{q}},{{y}_{q}}) $ 4. 按照$ 8:2 $的比例划分训练集和测试集 训练过程 1. 设置迭代次数$ {{\mathrm{epoch}}_1} $和$ {{\mathrm{epoch}}_2} $,批次$ {{\mathrm{batch}}_1} $和$ {{\mathrm{batch}}_2} $,损失
函数$ {{\mathrm{loss}}_1} $和$ {{\mathrm{loss}}_2} $,优化器$ {{O}_1} $和$ {O_2} $2. for $ e = 1,2, \cdots ,{{\mathrm{epoch}}_1} $ 3. for $ b = 1,2, \cdots ,{{\mathrm{batch}}_1} $ 4. 基于$ {{\mathrm{loss}}_1} $和$ {{O}_1} $训练区域选择网络 5. end 6. end 7. for $ s = 1,2, \cdots ,S $ 8. for $ e = 1,2, \cdots ,{{\mathrm{epoch}}_2} $ 9. for $ b = 1,2, \cdots ,{{\mathrm{batch}}_2} $ 10. 基于$ {{\mathrm{loss}}_2} $和$ {{O}_2} $训练第s个子区域的分通道单维注意力
机制和目标定位网络11. end 12. end 13. end 预测过程 1. if 需要目标定位 2. 基于$ {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}} $通过训练好的区域选择网络识别目标所属的
子区域RI3. 基于$ {\tilde {\boldsymbol{Y}}_{{\mathrm{in}}}} $和$ {\bf{RI}} $通过训练好的分通道单维注意力机制和目标定
位网络实现高精度的目标定位$ ({{x}_{q}},{{y}_{q}}) $4. end
下载: 导出CSV
表 1 仿真参数设置
Table 1. Simulation parameter settings
参数 数值 参数 数值 载波频率 30 GHz 天线间距 半波长 子载波间隔 60 kHz 循环前缀长度 64 子载波数 1024 发送AP坐标 $ (4.8,1.2),(5.2,9.2) $ 符号数 2 接收AP坐标 $ (2.4,0),(7.2,0),(2.8,10),(7.6,10) $
下载: 导出CSV
表 2 HRT-Net主要网络参数设置
Table 2. Main network parameter settings of HRT-Net
模块名称 操作 超参数 核尺寸 步长 填充 输入通道 输出通道 区域选择网络 基本卷积模块 标准卷积 $ (3,3) $ 1 2 2 32 轻量级卷积模块 第1层DW卷积 $ (3,3) $ 1 1 2 2 第2层DW卷积 $ (3,3) $ 1 1 32 32 第3层DW卷积 $ (3,3) $ 1 1 32 32 第4层DW卷积 $ (3,3) $ 1 1 64 64 第5层DW卷积 $ (3,3) $ 1 1 64 64 第6层DW卷积 $ (3,3) $ 1 1 128 128 回归模块 全连接层 \ \ \ 128 4 目标定位网络 多尺度卷积模块 标准卷积1 $ (3,3) $ 1 $ (1,1) $ 2 32 标准卷积2 $ (5,5) $ 1 $ (2,2) $ 2 32 标准卷积3 $ (9,9) $ 1 $ (4,4) $ 2 32 精细化卷积模块 第1层标准卷积1 $ (3,3) $ 2 1 2 32 第1层标准卷积2 $ (3,3) $ 2 1 32 32 第2层标准卷积1 $ (3,3) $ 2 1 32 64 第2层标准卷积2 $ (3,3) $ 2 1 64 64 第3层标准卷积1 $ (3,3) $ 2 1 64 128 第3层标准卷积2 $ (3,3) $ 2 1 128 128 回归模块 全连接层 \ \ \ 128 2 分通道单维注意力机制 标准卷积 $ (1,3) $ 1 $ (0,1) $ 2 1
下载: 导出CSV
表 3 实测场景参数设置
Table 3. Experimental scenario parameter settings
参数 数值 参数 数值 发送AP坐标 $ (2.4,1.2) $ 轨迹1 $ (2.4,5.0) \to (2.4,9.6) $ 接收AP坐标 $ (0,0),(1.2,0),(3.0,0),(4.8,0) $ 轨迹2 $ (0.6,4.1) \to (4.2,4.1) $ \ \ 轨迹3 $ (0.6,9.6) \to (4.8,5.4) $
下载: 导出CSV
-
[1] MAO Weihao, LU Yang, LIU Jingxian, et al. Beamforming design in cell-free massive MIMO integrated sensing and communication systems[C]. GLOBECOM 2023-2023 IEEE Global Communications Conference, Kuala Lumpur, Malaysia, 2023: 546–551. doi: 10.1109/GLOBECOM54140.2023.10437290. [2] 马丁友, 刘祥, 黄天耀, 等. 雷达通信一体化: 共用波形设计和性能边界[J]. 雷达学报, 2022, 11(2): 198–212. doi: 10.12000/JR21146.MA Dingyou, LIU Xiang, HUANG Tianyao, et al. Joint radar and communications: Shared waveform designs and performance bounds[J]. Journal of Radars, 2022, 11(2): 198–212. doi: 10.12000/JR21146. [3] LIU Fan, ZHENG Le, CUI Yuanhao, et al. Seventy years of radar and communications: The road from separation to integration[J]. IEEE Signal Processing Magazine, 2023, 40(5): 106–121. doi: 10.1109/MSP.2023.3272881. [4] YOU Xiaohu, HUANG Yongming, LIU Shengheng, et al. Toward 6G TKμ extreme connectivity: Architecture, key technologies and experiments[J]. IEEE Wireless Communications, 2023, 30(3): 86–95. doi: 10.1109/MWC.004.2200482. [5] LU Shihang, LIU Fan, LI Yunxin, et al. Integrated sensing and communications: Recent advances and ten open challenges[J]. IEEE Internet of Things Journal, 2024, 11(11): 19094–19120. doi: 10.1109/JIOT.2024.3361173. [6] 尹浩, 黄宇红, 韩林丛, 等. 6G通信–感知–计算融合网络的思考[J]. 中国科学: 信息科学, 2023, 53(9): 1838–1842. doi: 10.1360/SSI-2023-0135.YIN Hao, HUANG Yuhong, HAN Lincong, et al. Thoughts on 6G integrated communication, sensing and computing networks[J]. SCIENTIA SINICA Informationis, 2023, 53(9): 1838–1842. doi: 10.1360/SSI-2023-0135. [7] WANG Yunlong, WU Ying, and SHEN Yuan. Cooperative tracking by multi-agent systems using signals of opportunity[J]. IEEE Transactions on Communications, 2020, 68(1): 93–105. doi: 10.1109/TCOMM.2019.2944605. [8] XIE Lei, SONG Shenghui, ELDAR Y C, et al. Collaborative sensing in perceptive mobile networks: Opportunities and challenges[J]. IEEE Wireless Communications, 2023, 30(1): 16–23. doi: 10.1109/MWC.005.2200214. [9] NGO H Q, ASHIKHMIN A, YANG Hong, et al. Cell-free massive MIMO versus small cells[J]. IEEE Transactions on Wireless Communications, 2017, 16(3): 1834–1850. doi: 10.1109/TWC.2017.2655515. [10] MENG Kaitao, MASOUROS C, PETROPULU A P, et al. Cooperative ISAC networks: Opportunities and challenges[J]. IEEE Wireless Communications, 2024, 1–8. doi: 10.1109/MWC.008.2400151. [11] WANG Xinhua, ASHIKHMIN A, and WANG Xiaodong. Wirelessly powered cell-free IoT: Analysis and optimization[J]. IEEE Internet of Things Journal, 2020, 7(9): 8384–8396. doi: 10.1109/JIOT.2020.2990378. [12] WEI Chen, XU Kui, SHEN Zhexian, et al. Fingerprint-based localization and channel estimation integration for cell-free massive MIMO IoT systems[J]. IEEE Internet of Things Journal, 2022, 9(24): 25237–25252. doi: 10.1109/JIOT.2022.3195899. [13] 王鼎, 尹洁昕, 高路, 等. 一种协同二维DOA和TDOA观测量的超视距短波辐射源定位新方法[J]. 雷达学报(中英文), 2024, 13(6): 1135–1156. doi: 10.12000/JR24136.WANG Ding, YIN Jiexin, GAO Lu, et al. A novel cooperative positioning method for over-the-horizon shortwave emitter based on two-dimensional direction-of-arrival and time-difference-of-arrival measurements[J]. Journal of Radars, 2024, 13(6): 1135–1156. doi: 10.12000/JR24136. [14] XU Sheng, WU Linlong, DOĞANÇAY K, et al. A hybrid approach to optimal TOA-sensor placement with fixed shared sensors for simultaneous multi-target localization[J]. IEEE Transactions on Signal Processing, 2022, 70: 1197–1212. doi: 10.1109/TSP.2022.3152232. [15] YUAN Weijie, WU Nan, GUO Qinghua, et al. TOA-based passive localization constructed over factor graphs: A unified framework[J]. IEEE Transactions on Communications, 2019, 67(10): 6952–6965. doi: 10.1109/TCOMM.2019.2930517. [16] 朱丹, 徐威远, 陈文娟, 等. 基于光波分复用网络的分布式多目标定位系统[J]. 雷达学报, 2019, 8(2): 171–177. doi: 10.12000/JR19028.ZHU Dan, XU Weiyuan, CHEN Wenjuan, et al. Distributed multi-target localization system based on optical wavelength division multiplexing network[J]. Journal of Radars, 2019, 8(2): 171–177. doi: 10.12000/JR19028. [17] DAI Zichao, WANG Gang, JIN Xiaoping, et al. Nearly optimal sensor selection for TDOA-based source localization in wireless sensor networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 12031–12042. doi: 10.1109/TVT.2020.3011118. [18] MENG Fan, LIU Shengheng, GAO Songtao, et al. TDoA positioning with data-driven LoS inference in mmWave MIMO communications[J]. Signal Processing, 2024, 220: 109447. doi: 10.1016/j.sigpro.2024.109447. [19] LIU Shengheng, LI Xingkang, MAO Zihuan, et al. Model-driven deep neural network for enhanced AoA estimation using 5G gNB[C]. The 38th AAAI Conference on Artificial Intelligence, Vancouver, Canada, 2024: 214–221. doi: 10.1609/aaai.v38i1.27773. [20] WANG Shengchu, JIANG Xianbo, and WYMEERSCH H. Cooperative localization in wireless sensor networks with AOA measurements[J]. IEEE Transactions on Wireless Communications, 2022, 21(8): 6760–6773. doi: 10.1109/TWC.2022.3152426. [21] MENG Kaitao, HAN K, MASOUROS C, et al. Network-level ISAC: Performance analysis and optimal antenna-to-BS allocation[J]. arXiv: 2410.06365, 2024. doi: 10.48550/arXiv.2410.06365. [22] ZUO Peiliang, PENG Tao, WU Hao, et al. Directional source localization based on RSS-AOA combined measurements[J]. China Communications, 2020, 17(11): 181–193. doi: 10.23919/JCC.2020.11.015. [23] ZHANG Zhenkun, REN Hong, PAN Cunhua, et al. Target localization in cooperative ISAC systems: A scheme based on 5G NR OFDM signals[J]. IEEE Transactions on Communications, 2024, 1. doi: 10.1109/TCOMM.2024.3486981. [24] YIN Lu, NI Qiang, and DENG Zhongliang. Intelligent multisensor cooperative localization under cooperative redundancy validation[J]. IEEE Transactions on Cybernetics, 2021, 51(4): 2188–2200. doi: 10.1109/TCYB.2019.2900312. [25] FIGUEROA M R, BISHOYI P K, and PETROVA M. Optimal weight scheme for fusion-assisted cooperative multi-monostatic object localization in 6G networks[J]. arXiv: 2408.16464, 2024. doi: 10.48550/arXiv.2408.16464. [26] JIA Ruo, XU Kui, XIA Xiaochen, et al. Time-sequential cooperative localization for moving sensor in millimeter-wave cell-free massive MIMO system[J]. IEEE Sensors Journal, 2022, 22(22): 22008–22019. doi: 10.1109/JSEN.2022.3211743. [27] WEI Zhiqing, XU Ruizhong, FENG Zhiyong, et al. Symbol-level integrated sensing and communication enabled multiple base stations cooperative sensing[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 724–738. doi: 10.1109/TVT.2023.3304856. [28] PUCCI L, BACCHIELLI T, and GIORGETTI A. Cooperative maximum likelihood target position estimation for MIMO-ISAC networks[J]. arXiv: 2411.05187, 2024. doi: 10.48550/arXiv.2411.05187. [29] GAO Peng, LIAN Lixiang, and YU Jinpei. Cooperative ISAC with direct localization and rate-splitting multiple access communication: A Pareto optimization framework[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(5): 1496–1515. doi: 10.1109/JSAC.2023.3240714. [30] JIANG Wangjun, WEI Zhiqing, LI Bin, et al. Improve radar sensing performance of multiple roadside units cooperation via space registration[J]. IEEE Transactions on Vehicular Technology, 2022, 71(10): 10975–10990. doi: 10.1109/TVT.2022.3184182. [31] TAGLIAFERRI D, MANZONI M, MIZMIZI M, et al. Cooperative coherent multistatic imaging and phase synchronization in networked sensing[J]. IEEE Journal on Selected Areas in Communications, 2024, 42(10): 2905–2921. doi: 10.1109/JSAC.2024.3414609. [32] HUANG Yanru, MAZUELAS S, GE Feng, et al. Indoor localization system with NLOS mitigation based on self-training[J]. IEEE Transactions on Mobile Computing, 2023, 22(7): 3952–3966. doi: 10.1109/TMC.2022.3148338. [33] LIU Guanying, LIU An, ZHANG Rui, et al. Angular-domain selective channel tracking and Doppler compensation for high-mobility mmWave massive MIMO[J]. IEEE Transactions on Wireless Communications, 2021, 20(5): 2902–2916. doi: 10.1109/TWC.2020.3045272. [34] WYMEERSCH H and SECO-GRANADOS G. Radio localization and sensing—part II: State-of-the-art and challenges[J]. IEEE Communications Letters, 2022, 26(12): 2821–2825. doi: 10.1109/LCOMM.2022.3206846. [35] LIU Junchen, WANG Tianyu, LI Yuxiao, et al. A transformer-based signal denoising network for AoA estimation in NLoS environments[J]. IEEE Communications Letters, 2022, 26(10): 2336–2339. doi: 10.1109/LCOMM.2022.3187661. [36] HE Hangchuan, TANG Yupeng, and GUO Wensheng. Target localization in ISAC system based on BP neural network[C]. 2023 IEEE International Conference on Image Processing and Computer Applications (ICIPCA), Changchun, China, 2023: 444–450. doi: 10.1109/ICIPCA59209.2023.10257773. [37] TEDESCHINI B C, KWON G, NICOLI M, et al. Real-time Bayesian neural networks for 6G cooperative positioning and tracking[J]. IEEE Journal on Selected Areas in Communications, 2024, 42(9): 2322–2338. doi: 10.1109/JSAC.2024.3413950. [38] ZENG Fan, LIU Ruoyun, SUN Xiaoyu, et al. Multi-static ISAC based on network-assisted full-duplex cell-free networks: Performance analysis and duplex mode optimization[J]. arXiv: 2406.08268, 2024. doi: 10.48550/arXiv.2406.08268. [39] ADHIKARY A, RAHA A D, QIAO Yu, et al. Holographic MIMO with integrated sensing and communication for energy-efficient cell-free 6G networks[J]. IEEE Internet of Things Journal, 2024, 11(19): 30617–30635. doi: 10.1109/JIOT.2024.3411695. [40] 郭帅, 陈婷, 王鹏辉, 等. 基于角度引导Transformer融合网络的多站协同目标识别方法[J]. 雷达学报, 2023, 12(3): 516–528. doi: 10.12000/JR23014.GUO Shuai, CHEN Ting, WANG Penghui, et al. Multistation cooperative radar target recognition based on an angle-guided Transformer fusion network[J]. Journal of Radars, 2023, 12(3): 516–528. doi: 10.12000/JR23014. [41] WOO S, PARK J, LEE J Y, et al. CBAM: Convolutional block attention module[C]. The 15th European Conference on Computer Vision (ECCV), Munich, Germany, 2018: 3–19. doi: 10.1007/978-3-030-01234-2_1. [42] TEMIZ M, ALSUSA E, and BAIDAS M W. A dual-function massive MIMO uplink OFDM communication and radar architecture[J]. IEEE Transactions on Cognitive Communications and Networking, 2022, 8(2): 750–762. doi: 10.1109/TCCN.2021.3128599. [43] HOWARD A G, ZHU Menglong, CHEN Bo, et al. Mobilenets: Efficient convolutional neural networks for mobile vision applications[J]. arXiv: 1704.04861, 2017. doi: 10.48550/arXiv.1704.04861. [44] ZHANG Haokui, LI Ying, JIANG Yenan, et al. Hyperspectral classification based on lightweight 3-D-CNN with transfer learning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(8): 5813–5828. doi: 10.1109/TGRS.2019.2902568. [45] KUMAR A, SHARMA A, BHARTI V, et al. MobiHisNet: A lightweight CNN in mobile edge computing for histopathological image classification[J]. IEEE Internet of Things Journal, 2021, 8(24): 17778–17789. doi: 10.1109/JIOT.2021.3119520. [46] AMMAR H A, ADVE R, SHAHBAZPANAHI S, et al. User-centric cell-free massive MIMO networks: A survey of opportunities, challenges and solutions[J]. IEEE Communications Surveys & Tutorials, 2022, 24(1): 611–652. doi: 10.1109/COMST.2021.3135119. [47] LU Zhilin, WANG Jintao, and SONG Jian. Multi-resolution CSI feedback with deep learning in massive MIMO system[C]. ICC 2020-2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 2020: 1–6. doi: 10.1109/ICC40277.2020.9149229. [48] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770–778. doi: 10.1109/CVPR.2016.90. [49] KINGMA D P and BA J L. Adam: A method for stochastic optimization[C]. The 3rd International Conference on Learning Representations, San Diego, USA, 2015. [50] SAKHNINI A, DE BAST S, GUENACH M, et al. Near-field coherent radar sensing using a massive MIMO communication testbed[J]. IEEE Transactions on Wireless Communications, 2022, 21(8): 6256–6270. doi: 10.1109/TWC.2022.3148035. [51] DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[C]. The 9th International Conference on Learning Representations, 2021. [52] LIU Rui, LI Jiamin, LIU Feiyang, et al. Scalable fingerprint-based localization framework for 3D cell-free radio access networks[J]. IEEE Communications Letters, 2024, 28(8): 1840–1844. doi: 10.1109/LCOMM.2024.3414991. [53] YIN Jun and VERHELST M. CNN-based robust sound source localization with SRP-PHAT for the extreme edge[J]. ACM Transactions on Embedded Computing Systems, 2023, 22(3): 55. doi: 10.1145/3586996. [54] CAO Yang, WANG Pan, ZHENG Kang, et al. Experimental performance evaluation of cell-free massive MIMO systems using COTS RRU with OTA reciprocity calibration and phase synchronization[J]. IEEE Journal on Selected Areas in Communications, 2023, 41(6): 1620–1634. doi: 10.1109/JSAC.2023.3276057. [55] WANG Dongming, YOU Xiaohu, HUANG Yongming, et al. Full-spectrum cell-free RAN for 6G systems: System design and experimental results[J]. Science China Information Sciences, 2023, 66(3): 130305. doi: 10.1007/s11432-022-3664-x. -







计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

