
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
An Identification Method of Polarization Modulation for Ship and Combined Corner Reflector Based on Civil Marine Radar
-
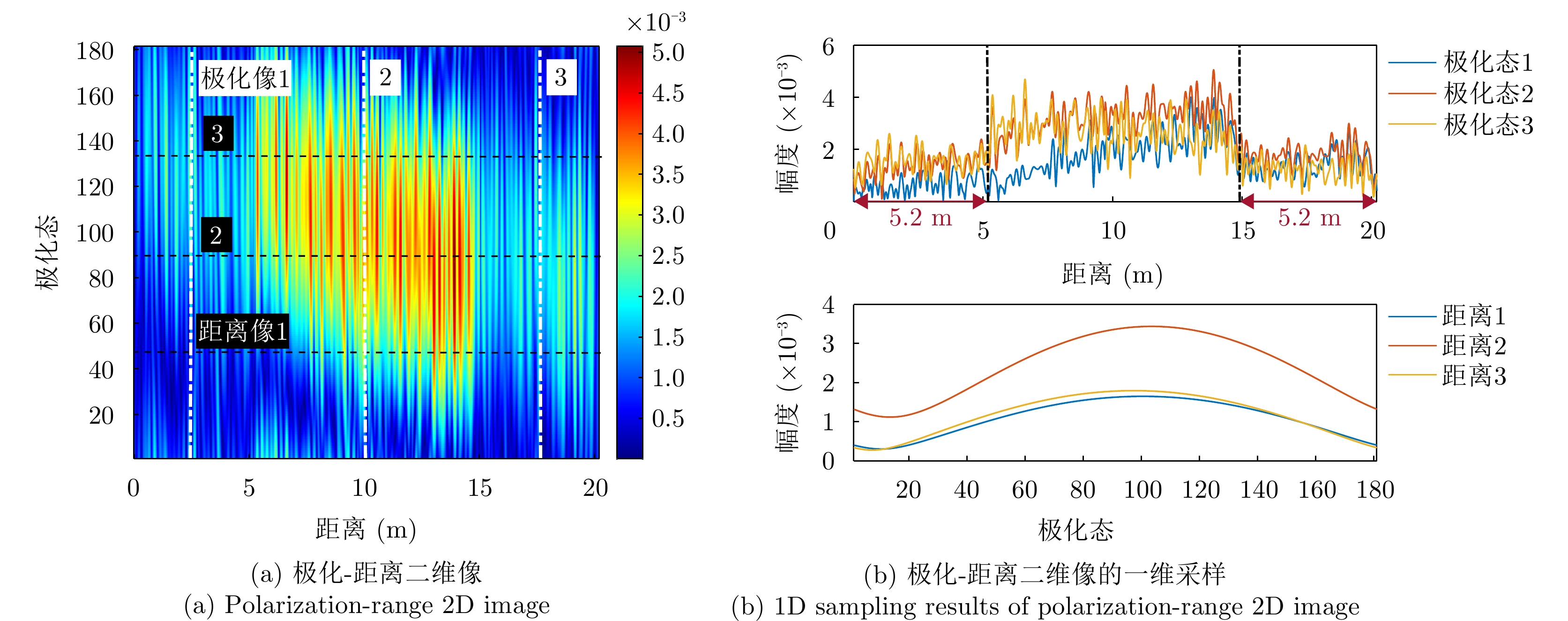
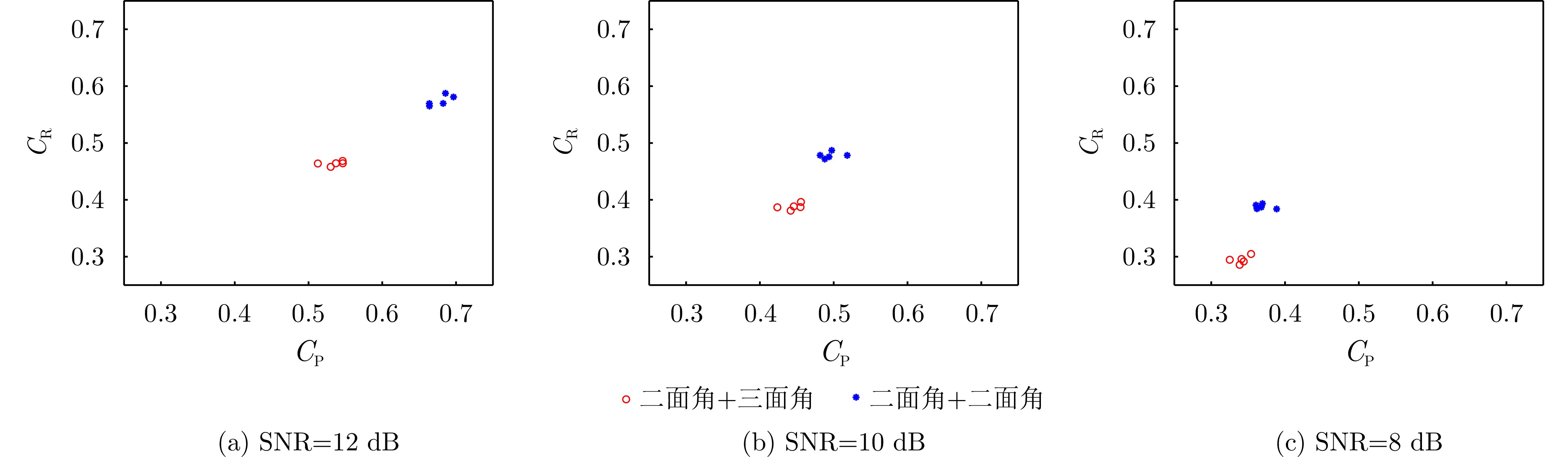
摘要: 舰船与角反射器的鉴别问题是一项具有挑战性的任务。常用的鉴别方法包括一维距离像、极化分解、极化域变焦等,基本思想均是通过发射大带宽信号提高距离分辨能力,后两种方法利用极化提升了目标鉴别的稳健性。单载频脉冲因距离分辨率低、脉压增益小,鲜有利用该信号鉴别舰船与角反的有关研究。但得益于较低的硬件成本,这种信号仍广泛应用于船用导航雷达。该文提出了一种基于船用导航雷达的舰船与角反组合体鉴别的极化调控方法,旨在充分挖掘窄带信号联合极化调控技术的目标鉴别潜力,通过构造极化-距离二维像,利用舰船和角反极化散射特性的差异实现鉴别。通过计算各个极化像和距离像之间皮尔逊相关系数的平均值,作为相关特征参数,利用支持向量机实现了目标鉴别。电磁仿真数据表明,在现有导航雷达所需目标探测信噪比(15 dB)和采样率(100 MHz)的基础上,增大设备带宽至信号带宽(2 MHz)的2~6倍,综合鉴别率可达90.18%~92.31%。探究了训练集俯仰角、方位角数据缺失50%对鉴别率的影响,4种情况在信噪比15 dB以上时鉴别率均高于85%;同时,在同等的窄带观测条件下对比该方法与极化分解方法的鉴别性能表明,在信噪比为15 dB及以上和6倍设备带宽的情况下,该方法综合鉴别率的平均值提升22.67%,这都充分证明了所提方法的有效性。此外,利用二面角和三面角在暗室构造了极化散射特性存在差异的两种场景,5组实测数据表明,回波信噪比为8~12 dB时,实验结果具有良好的类内聚合性和类间可分性,可作为电磁仿真鉴别结果的有效支撑。Abstract: Distinguishing between ships and corner reflectors is challenging in radar observations of the sea. Traditional identification methods, including high resolution range profiles, polarization decomposition, and polarization modulation, improve radial range resolution to the target by transmitting signals with a large bandwidth. The latter two methods use polarization to improve target identification. Single-carrier pulse signals, often used in civil marine radars owing to their low hardware cost, pose challenges in identifying ships and corner reflectors owing to their low range resolution and pulse compression gain. This article proposes a novel method for identifying ships and corner reflectors using polarization modulation in civil marine radars. This approach aims to fully exploit the target identification potential of the narrowband signal joint polarization modulation technology. Through constructing the polarization-range 2D images, the method differentiates between ships and corner reflectors through their unique polarization scattering characteristics. The process involves calculating the average Pearson correlation coefficient between each polarization image and the range image, which serves as the correlation feature parameter. A support vector machine is then employed to achieve accurate target identification. Electromagnetic simulations show that by increasing the device bandwidth to 2~6 times the original signal bandwidth (2 MHz), civil marine radar can achieve a comprehensive identification rate of 90.18%~92.31% at a Signal to Noise Ratio (SNR) of 15 dB and a sampling rate of 100 MHz. The study also explores the influence of missing 50% of pitch angle and azimuth angle data in the training set, finding that identification rates in all four cases exceed 85% when the SNR is above 15 dB. Comparisons with the polarization decomposition method under the same narrowband observation conditions show that when the SNR is 15 dB or higher and the device bandwidth is increased sixfold, the average identification rate of the proposed method improves by 22.67%. This strongly supports the effectiveness of the proposed method. In addition, two cases with different polarization scattering characteristics are constructed in the anechoic chamber using dihedral and trihedral setups. Five sets of measured data show that when the SNR of the echo is 8~12 dB, the experiments demonstrate strong intra-class aggregation and clear inter-class separability. These results effectively support the electromagnetic simulation findings.
-
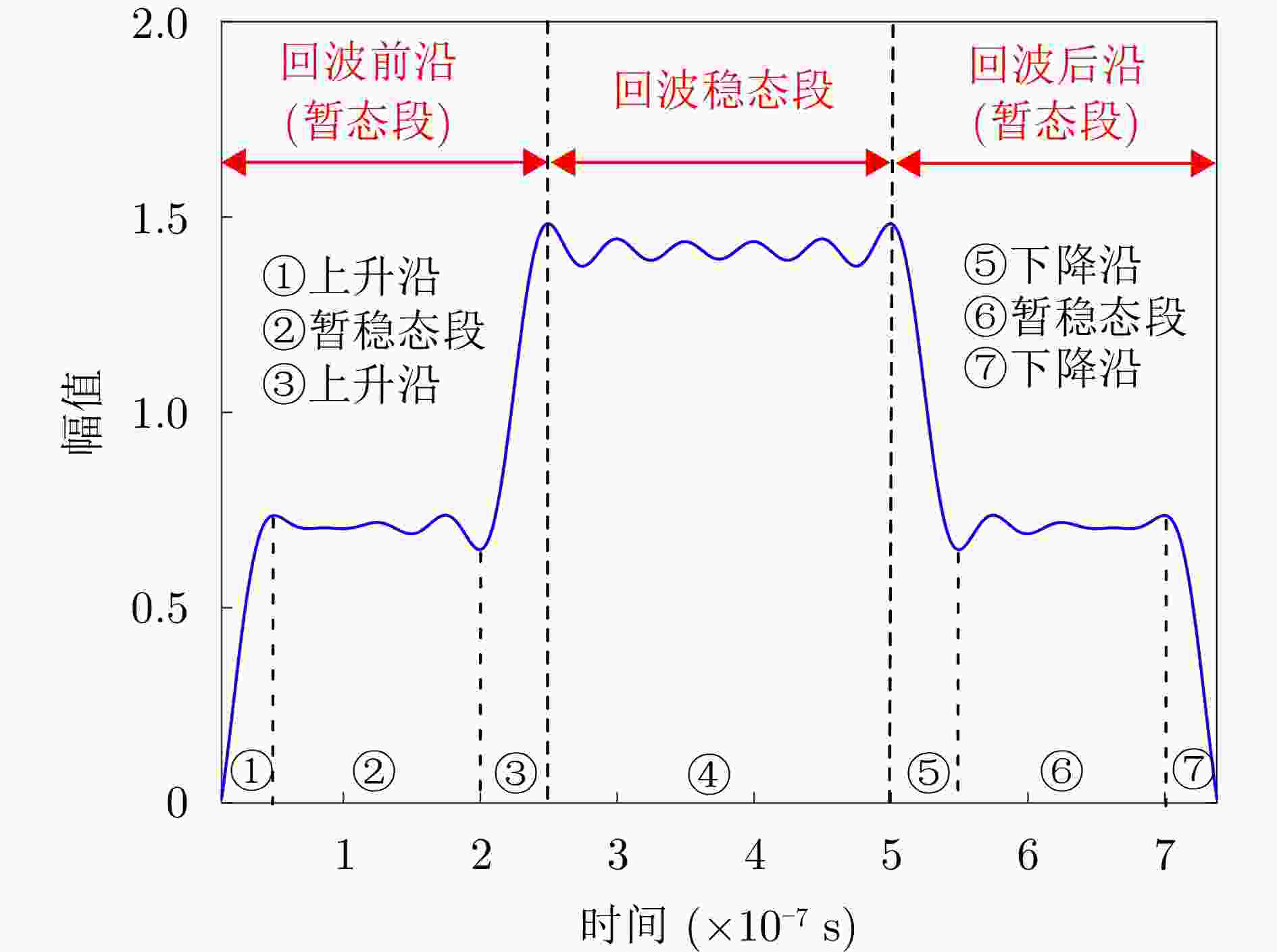
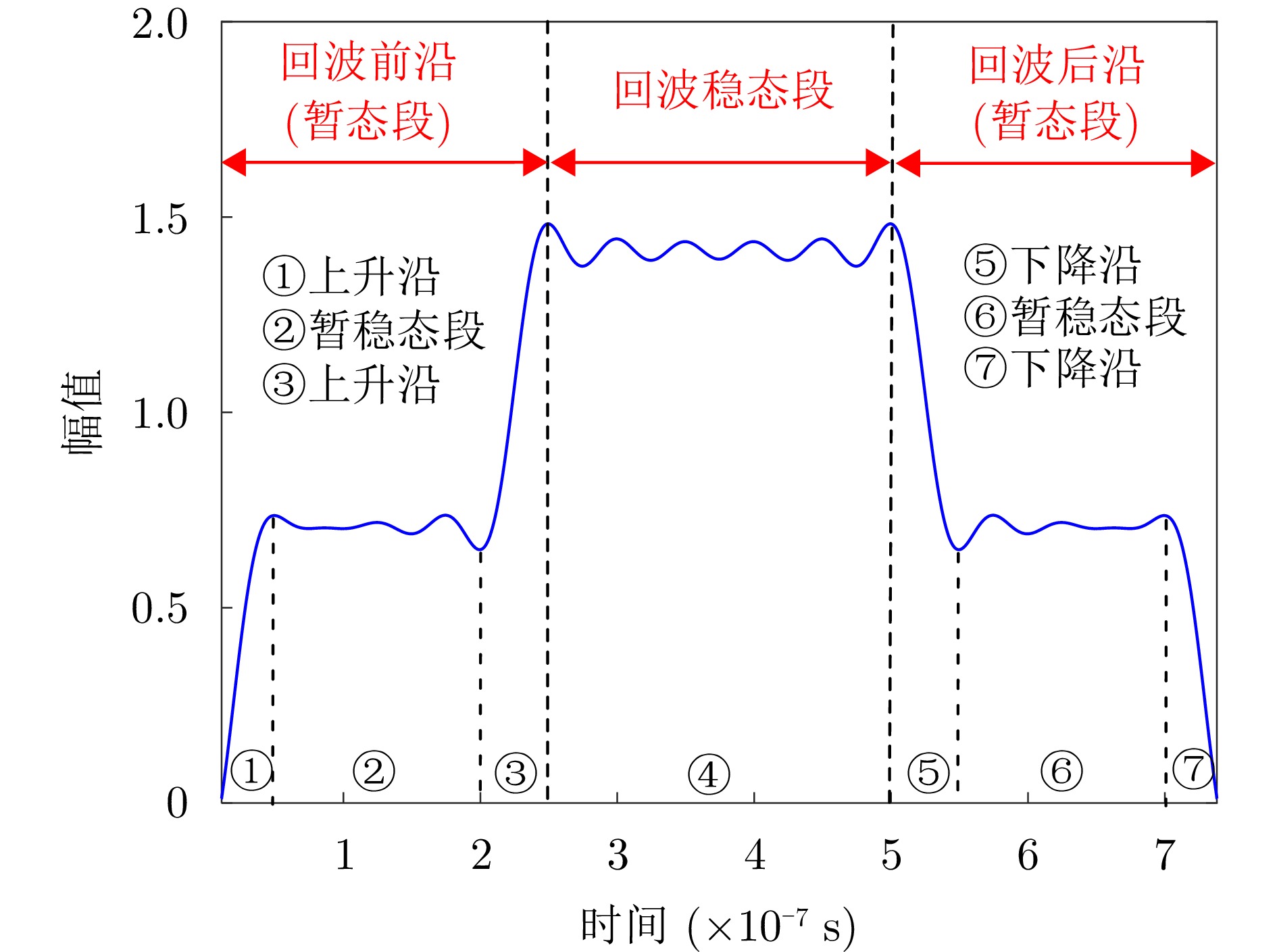
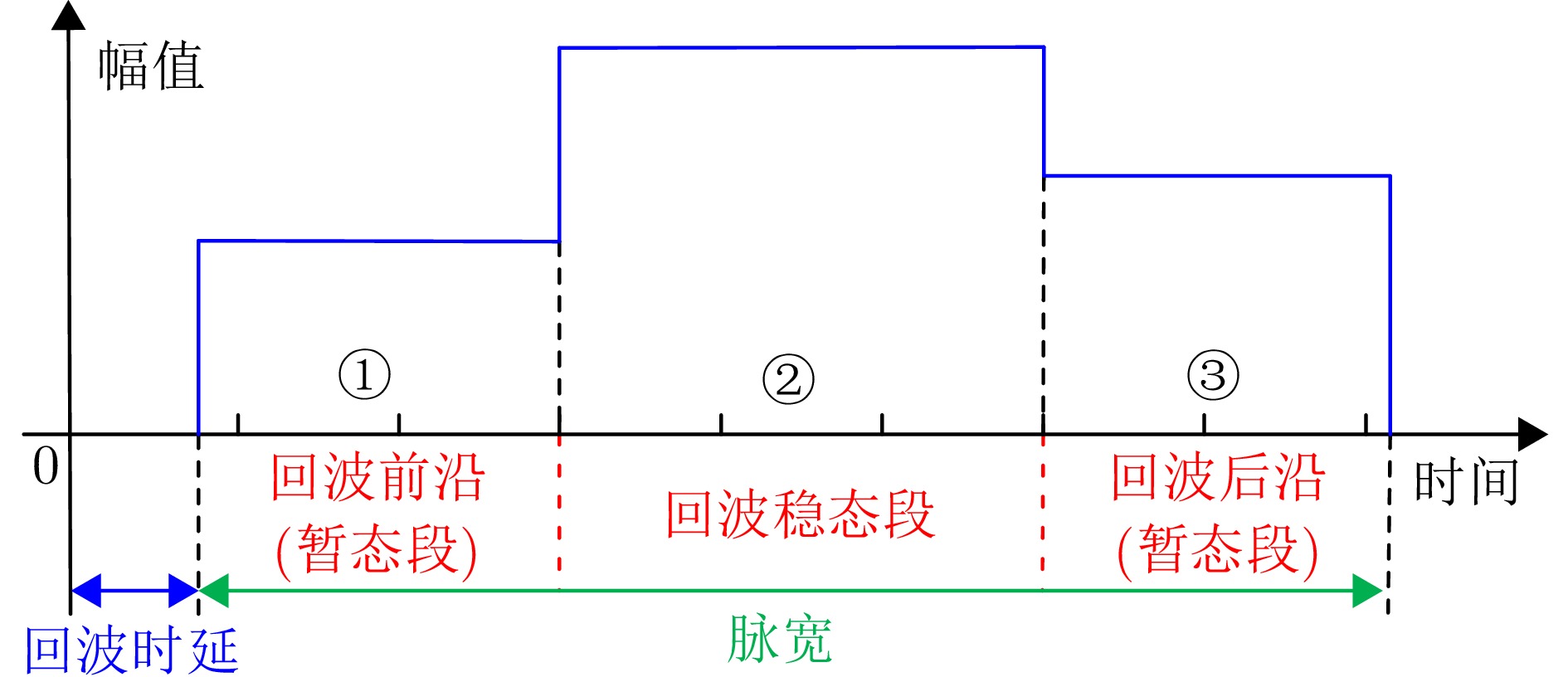
图 4 经带限设备滤波后两点目标回波各阶段的示意图
Figure 4. Echo of two-point targets after passing through the band-limited device
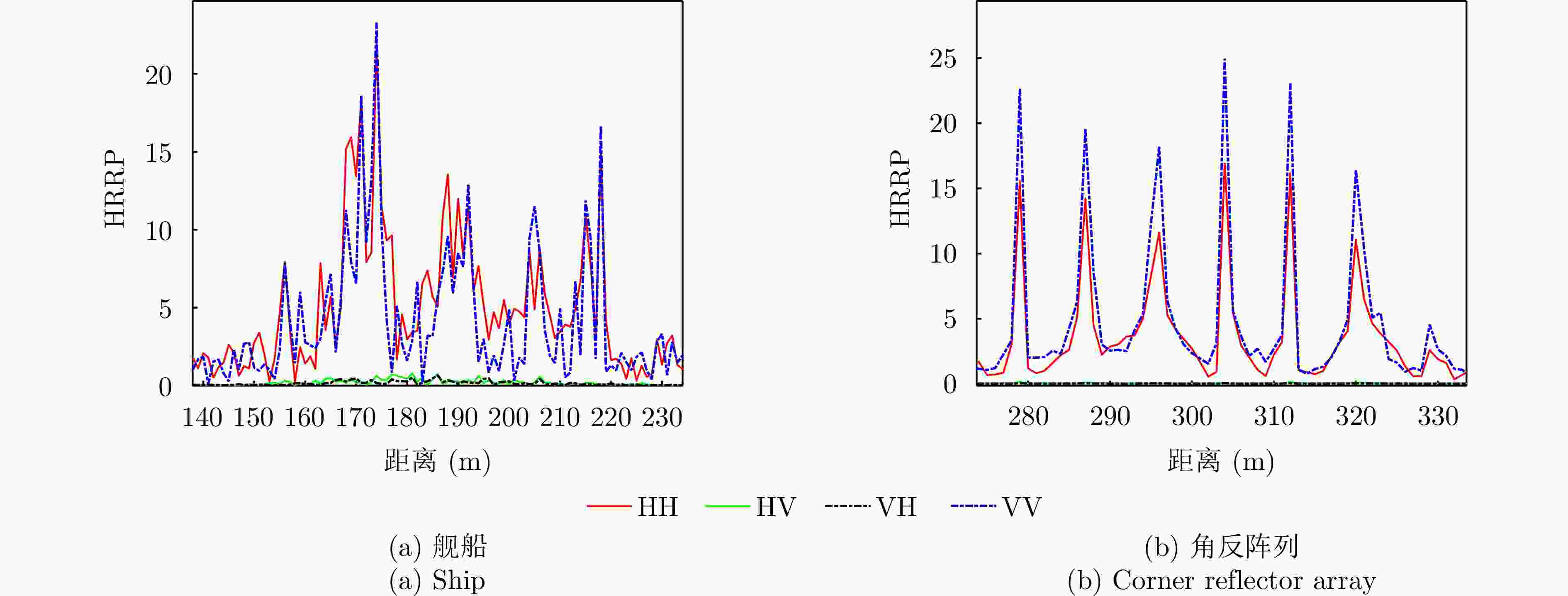
图 6 舰船1和角反阵列1的全极化HRRP(俯仰角40°、方位角50°)
Figure 6. Full-polarization HRRPs of ship 1 and corner reflector array 1 (pitch angle 40°, azimuth angle 50°)
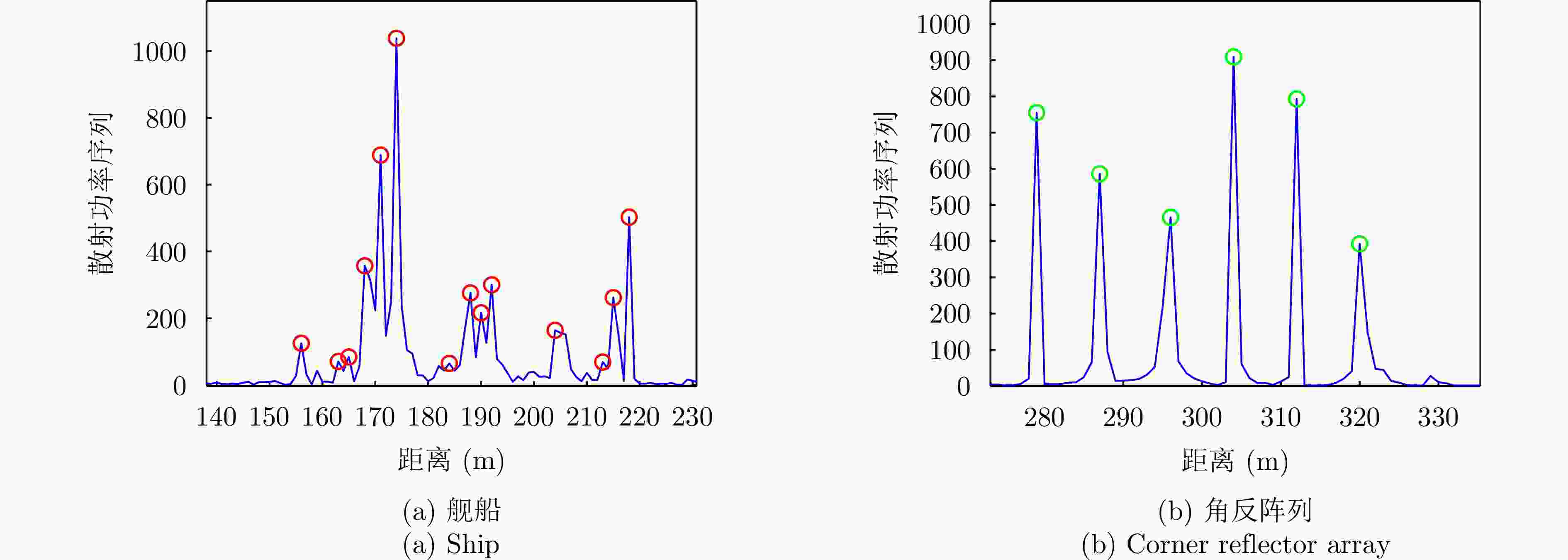
图 7 舰船和角反阵列散射功率序列的阈值检测结果
Figure 7. Threshold detection results of span sequence of the ship and corner reflector array
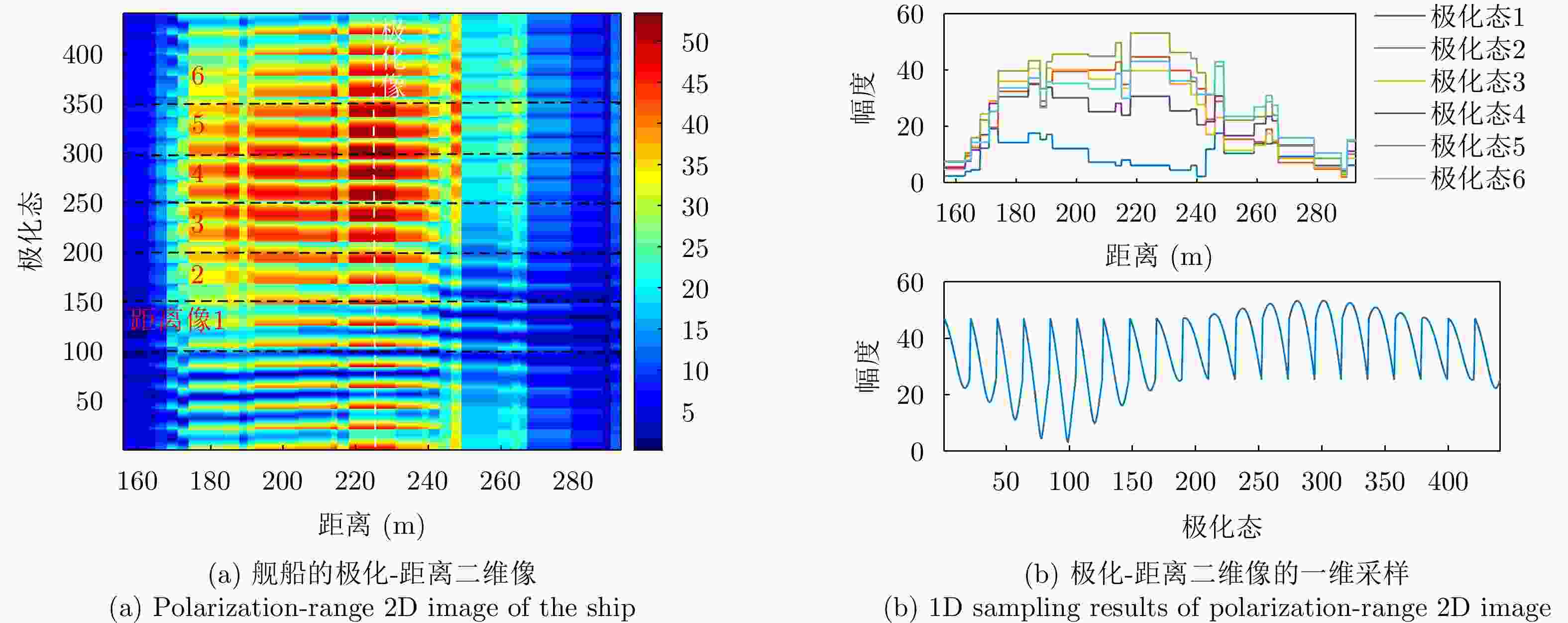
图 8 舰船的仿真结果(俯仰角40°、方位角50°)
Figure 8. Simulation results of the ship (pitch angle 40°, azimuth angle 50°)
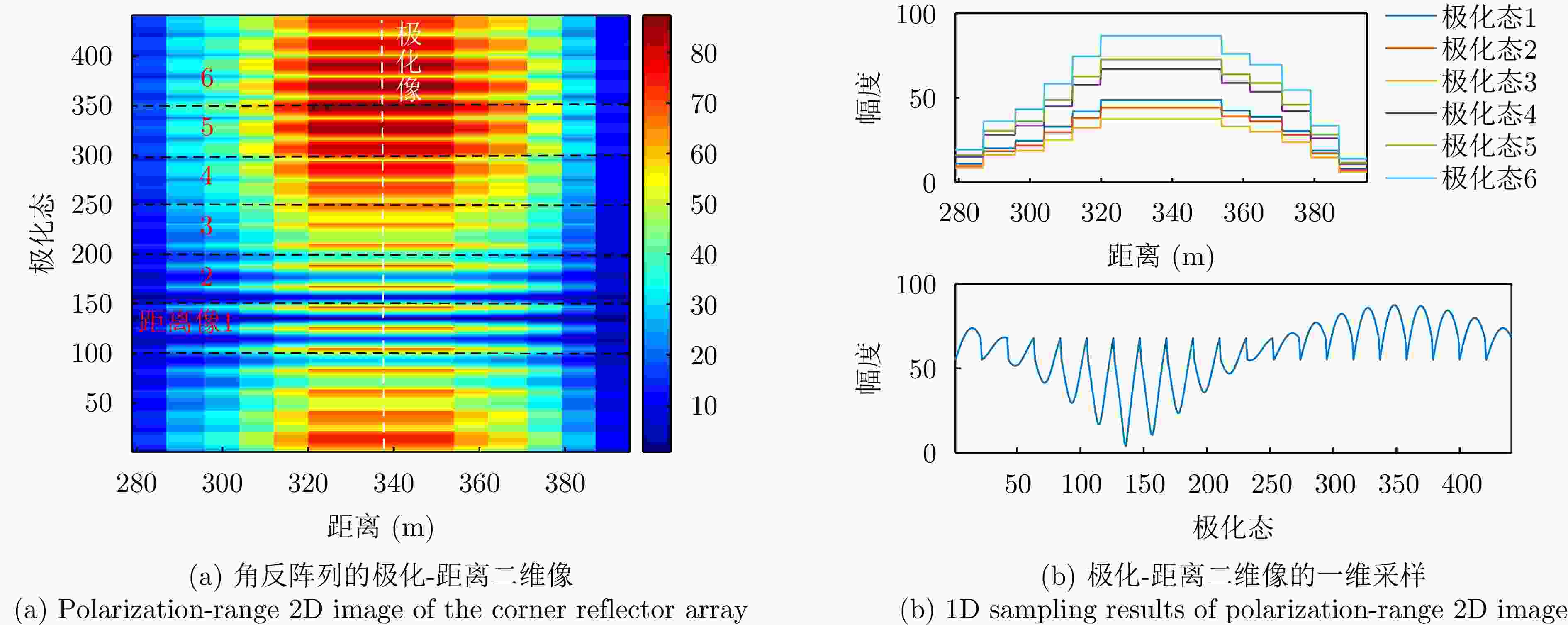
图 9 角反阵列的仿真结果(俯仰角40°、方位角50°)
Figure 9. Simulation results of the corner reflector array (pitch angle 40°, azimuth angle 50°)
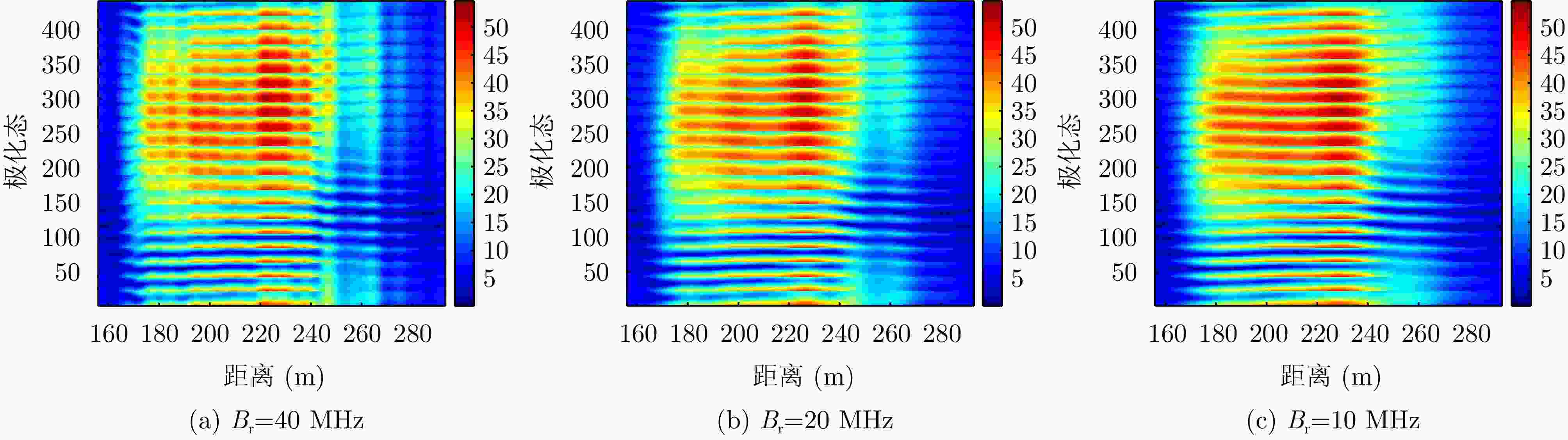
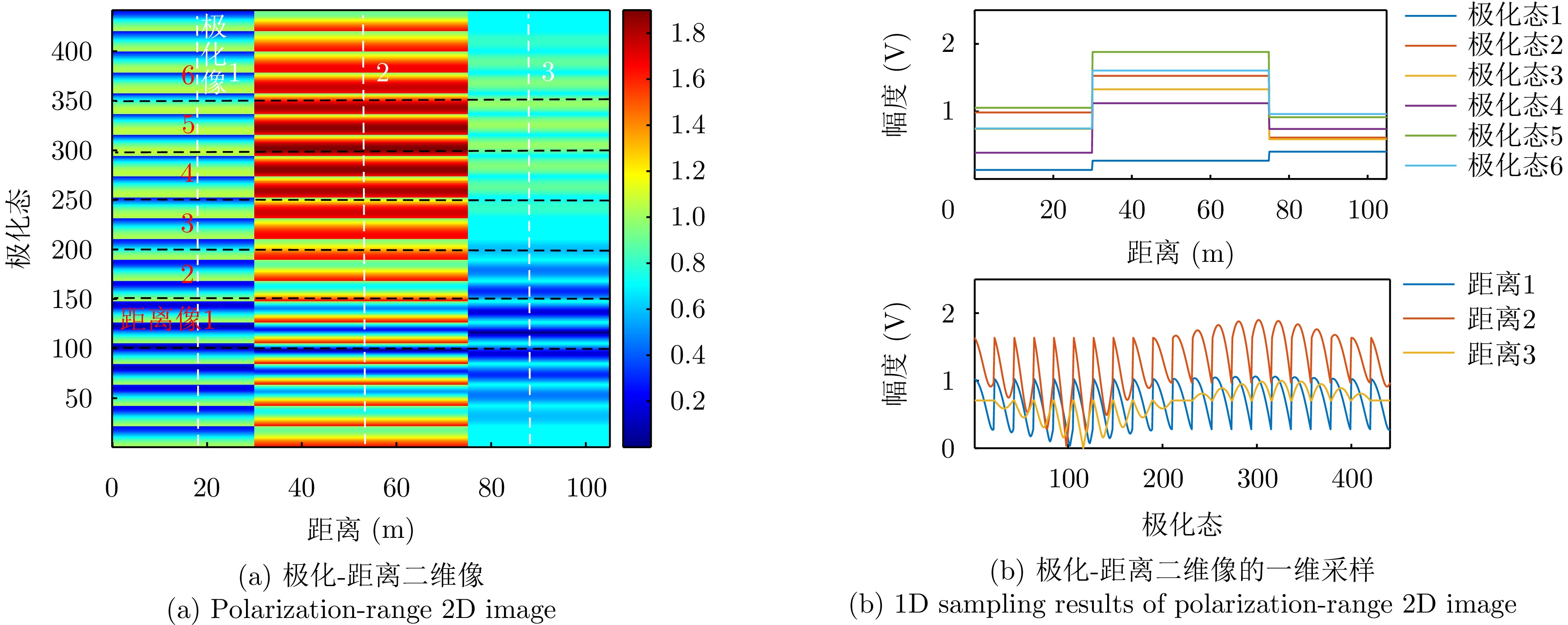
图 10 舰船的极化-距离二维像(SNR=30 dB)
Figure 10. Polarization-range 2D image of the ship (SNR=30 dB)
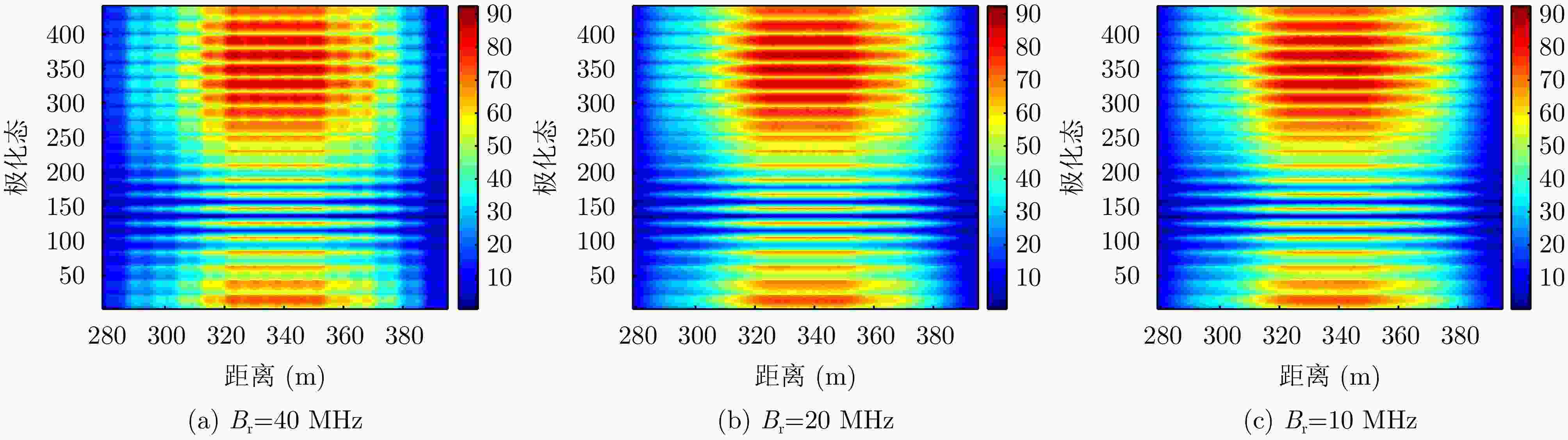
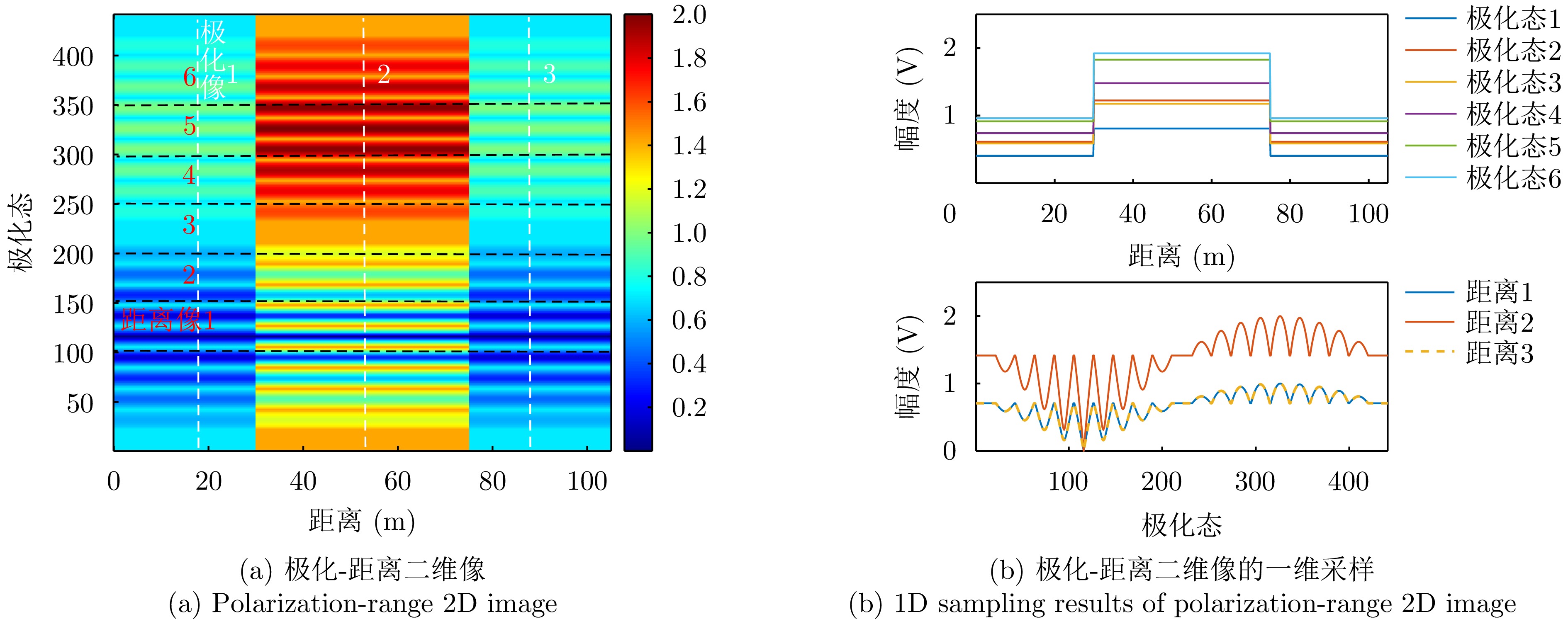
图 11 角反阵列的极化-距离二维像(SNR=30 dB)
Figure 11. Polarization-range 2D image of the corner reflector array (SNR=30 dB)
图 12 舰船的极化-距离二维像(${B_{\text{r}}} = 40\;{\text{MHz}}$)
Figure 12. Polarization-range 2D image of the ship (${B_{\text{r}}} = 40\;{\text{MHz}}$)
图 13 角反阵列的极化-距离二维像(${B_{\text{r}}} = 40\;{\text{MHz}}$)
Figure 13. Polarization-range 2D image of the corner reflector array (${B_{\text{r}}} = 40\;{\text{MHz}}$)
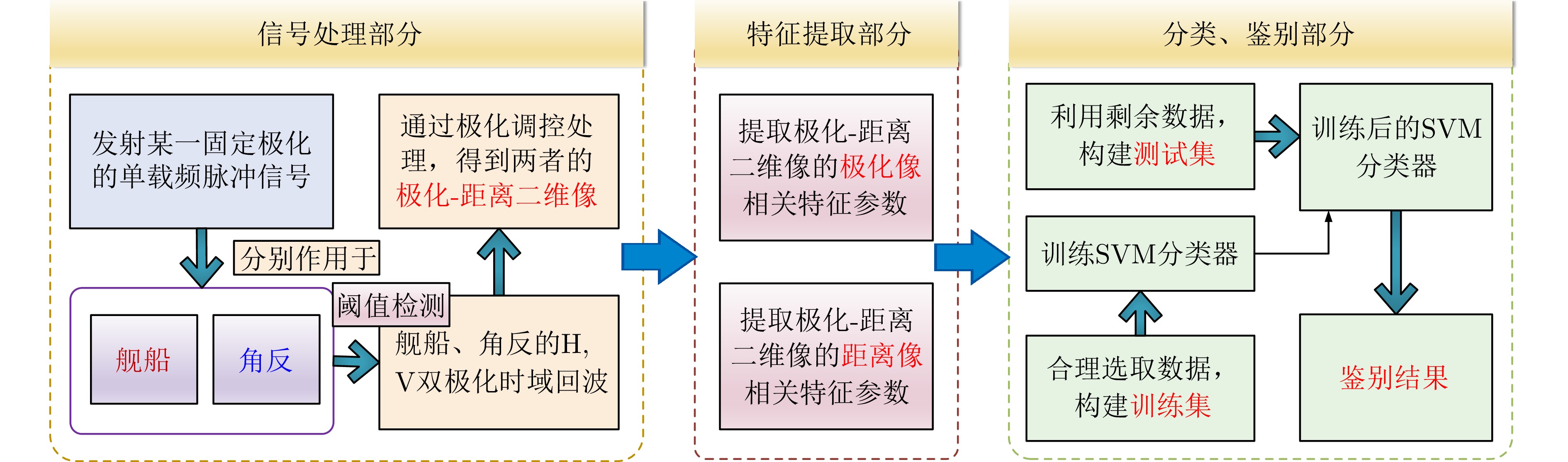
图 14 基于单载频脉冲的极化调控鉴别流程图
Figure 14. The identification flow chart of polarization modulation based on the single carrier pulse
图 16 舰船和角反相关特征参数的二维表征结果(理想情况)
Figure 16. 2D characterization results of the ship and corner reflector correlation parameters (ideal condition)
图 17 鉴别率随SNR的变化曲线(${B_{\text{r}}} = 40\;{\text{MHz}}$, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
Figure 17. Curves of identification rate changes with SNR (${B_{\text{r}}} = 40\;{\text{MHz}}$, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
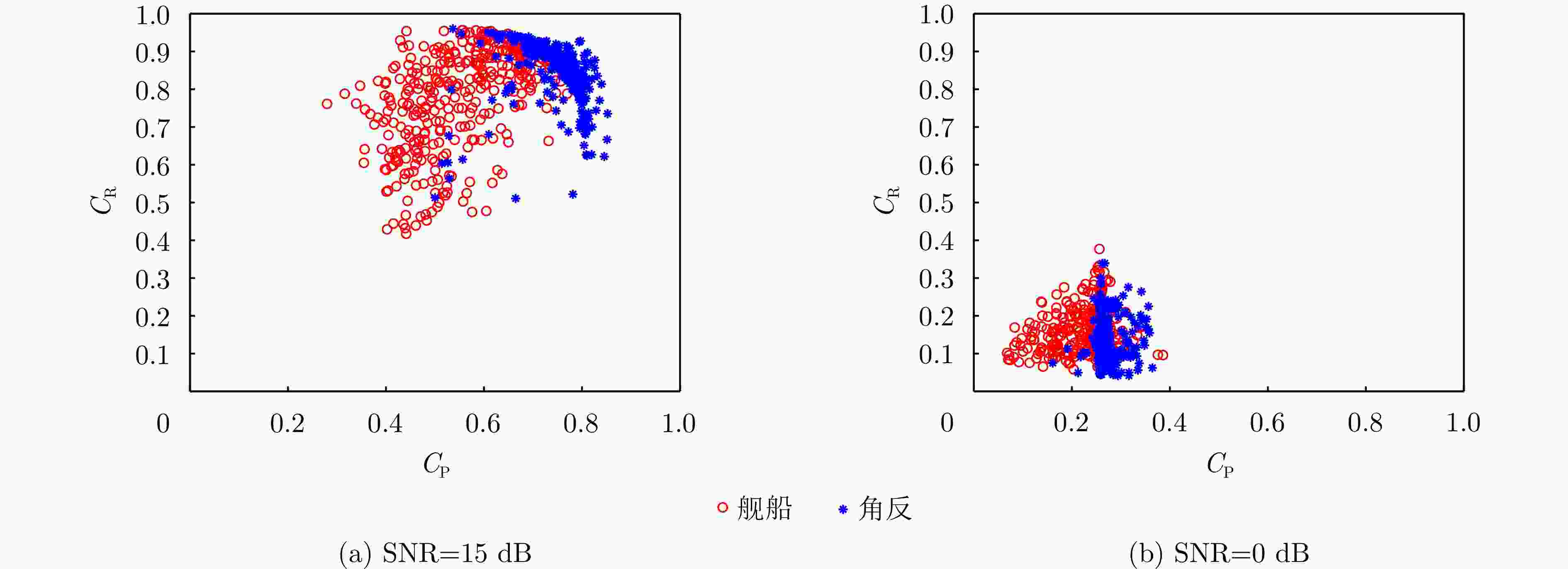
图 18 舰船和角反相关特征参数的二维表征结果(${B_{\text{r}}} = 40\;{\text{MHz}}$, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
Figure 18. 2D characterization results of the ship and corner reflector correlation parameters (${B_{\text{r}}} = 40\;{\text{MHz}}$, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
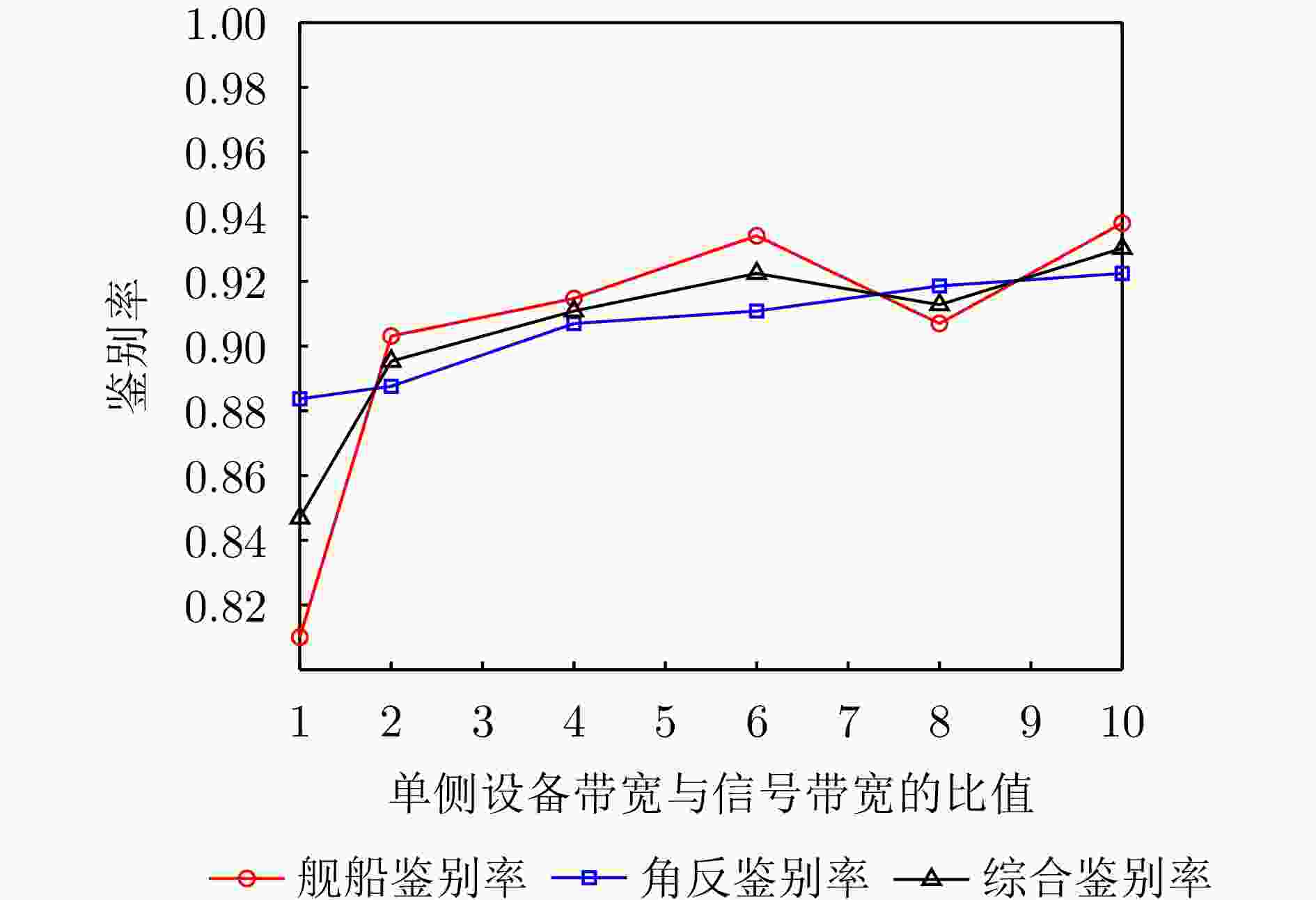
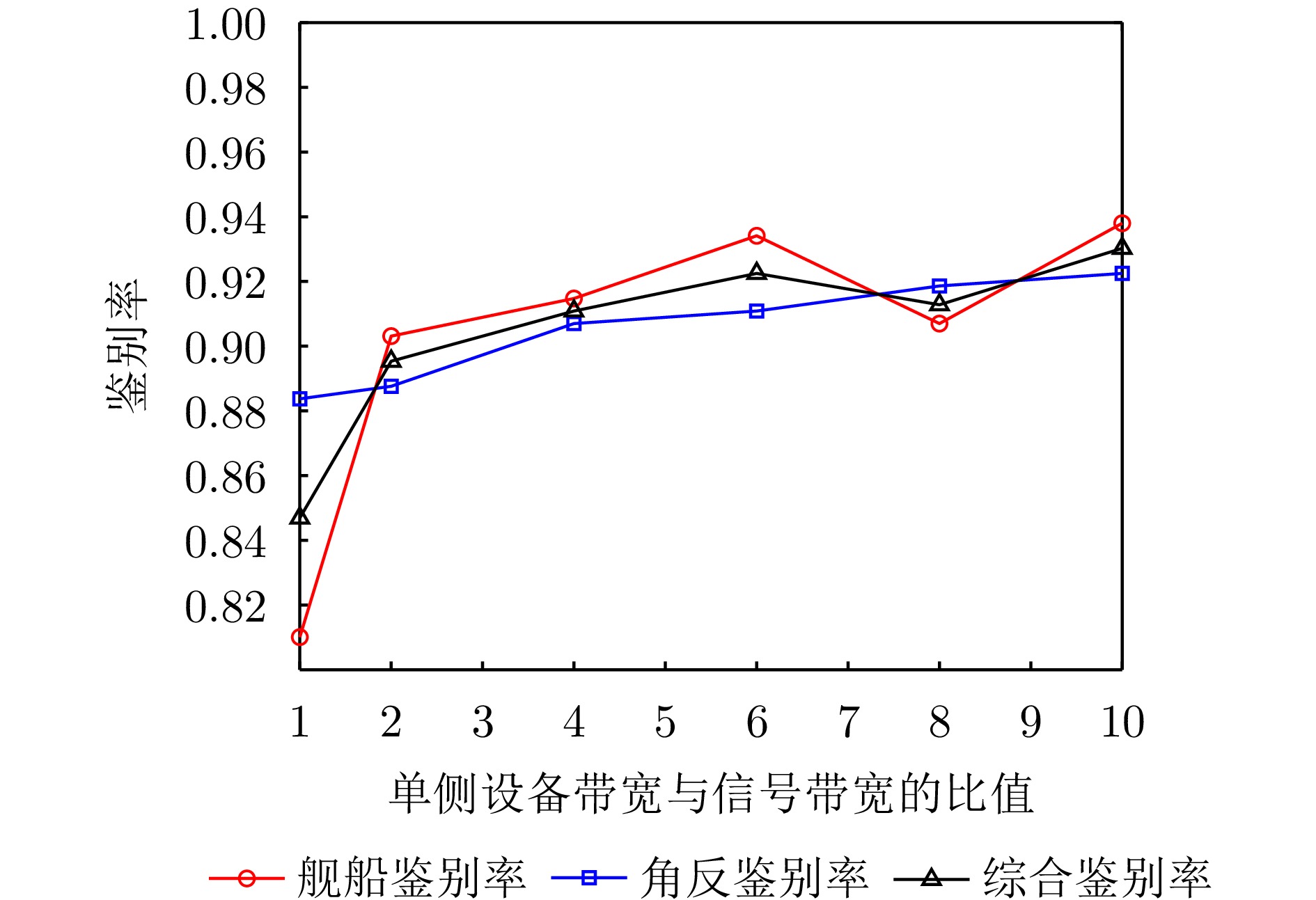
图 19 鉴别率随${B_{\text{r}}}$的变化曲线(SNR=15 dB, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
Figure 19. Curves of identification rate changes with ${B_{\text{r}}}$ (SNR=15 dB, ${f_{\text{s}}} = 1\;{\text{GHz}}$)
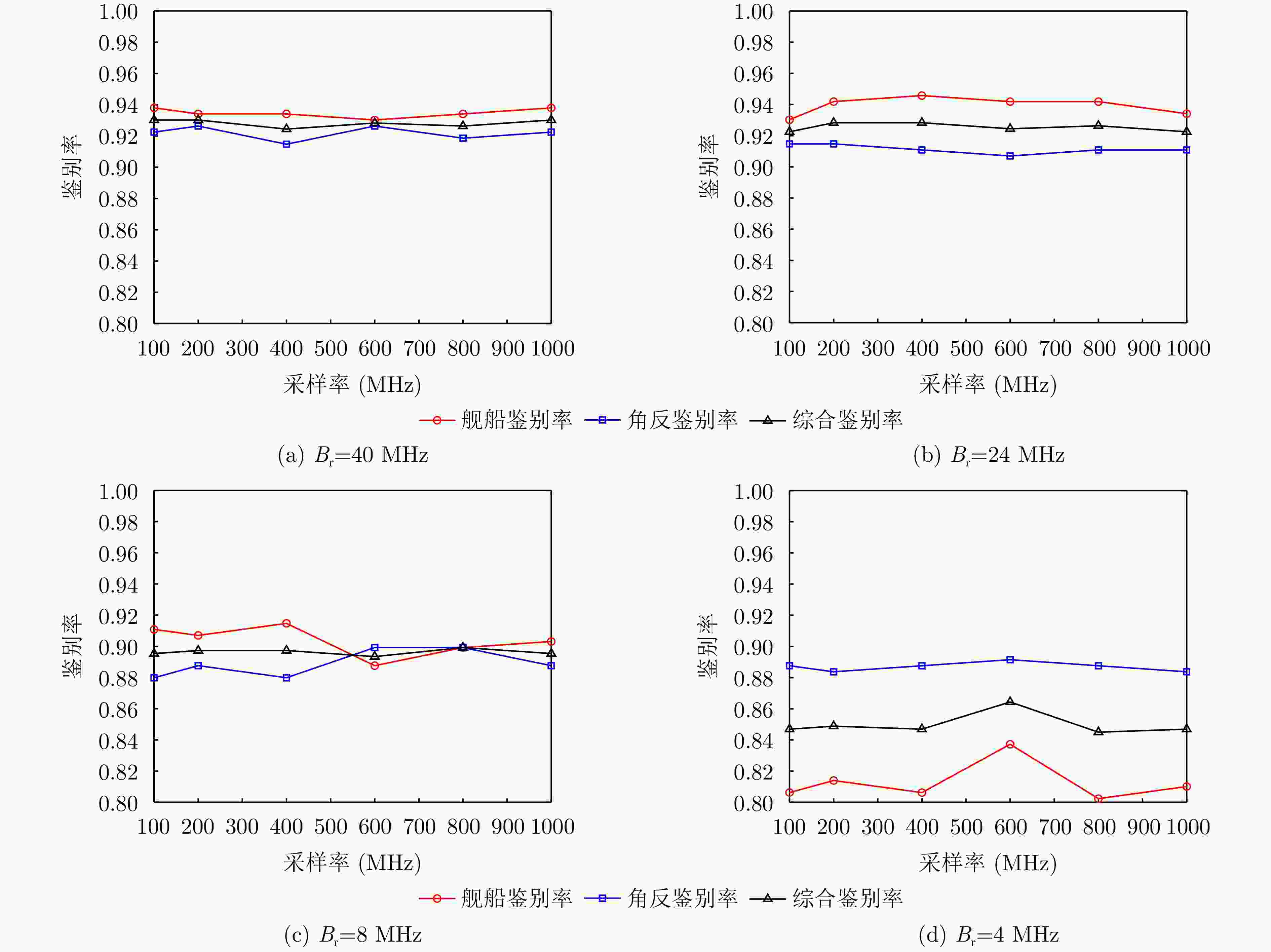
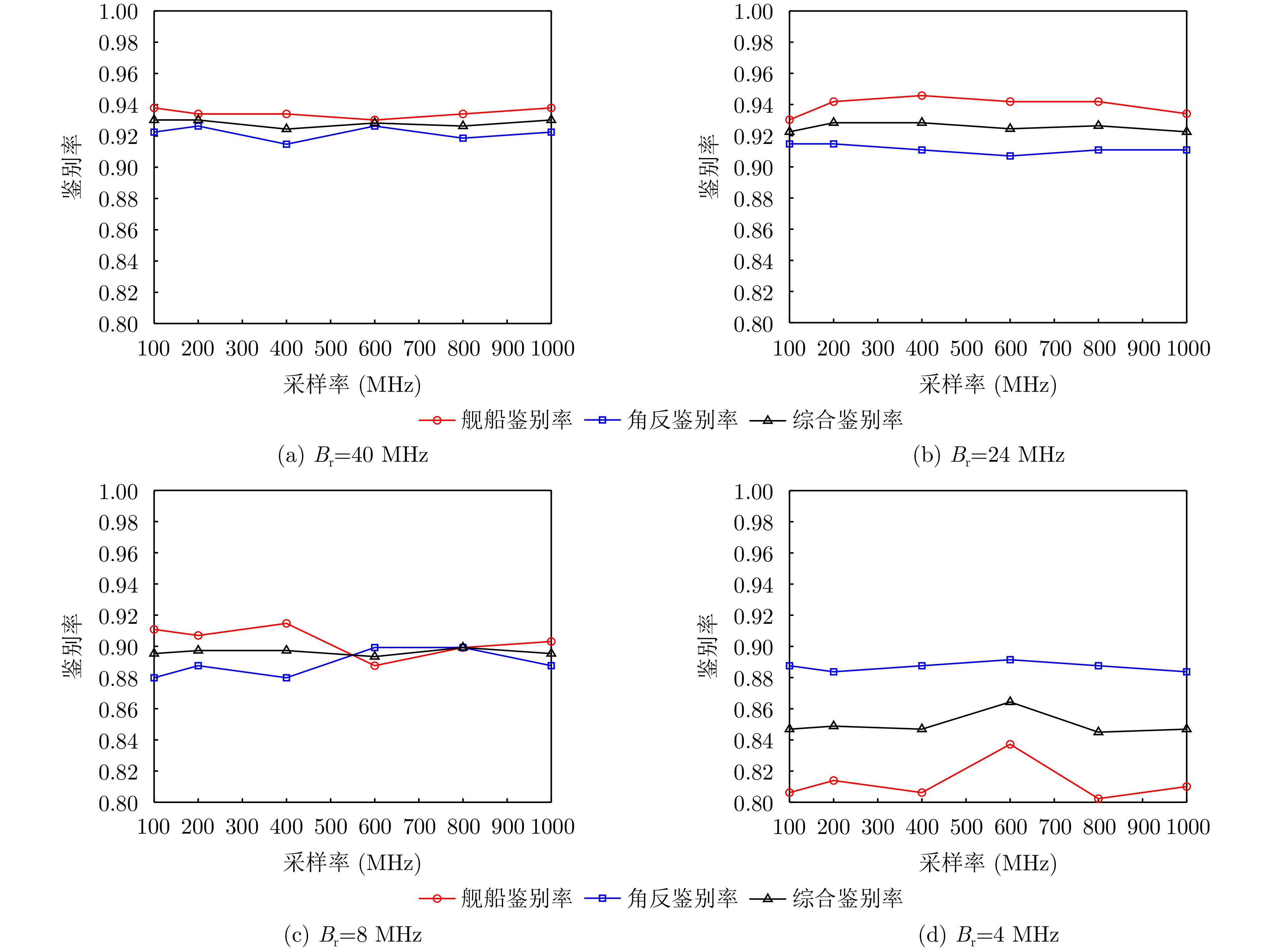
图 20 鉴别率随${f_{\text{s}}}$的变化曲线(SNR=15 dB)
Figure 20. Curves of identification rate changes with ${f_{\text{s}}}$ (SNR=15 dB)
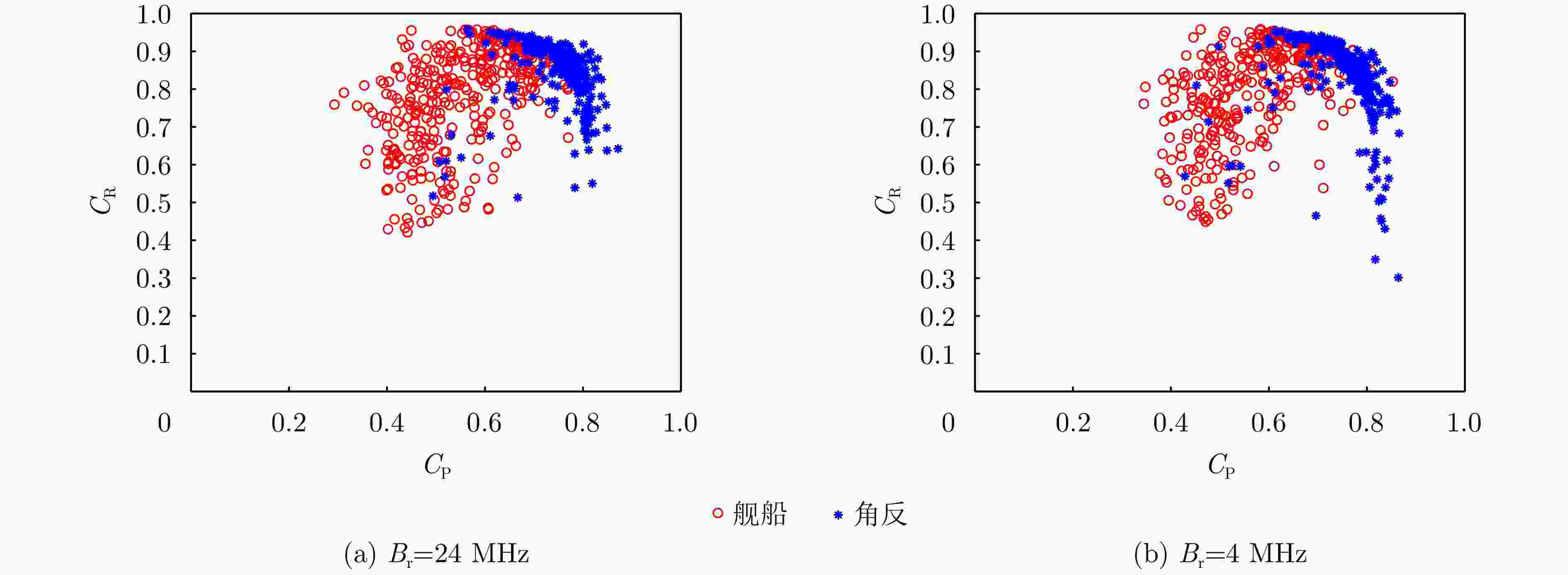
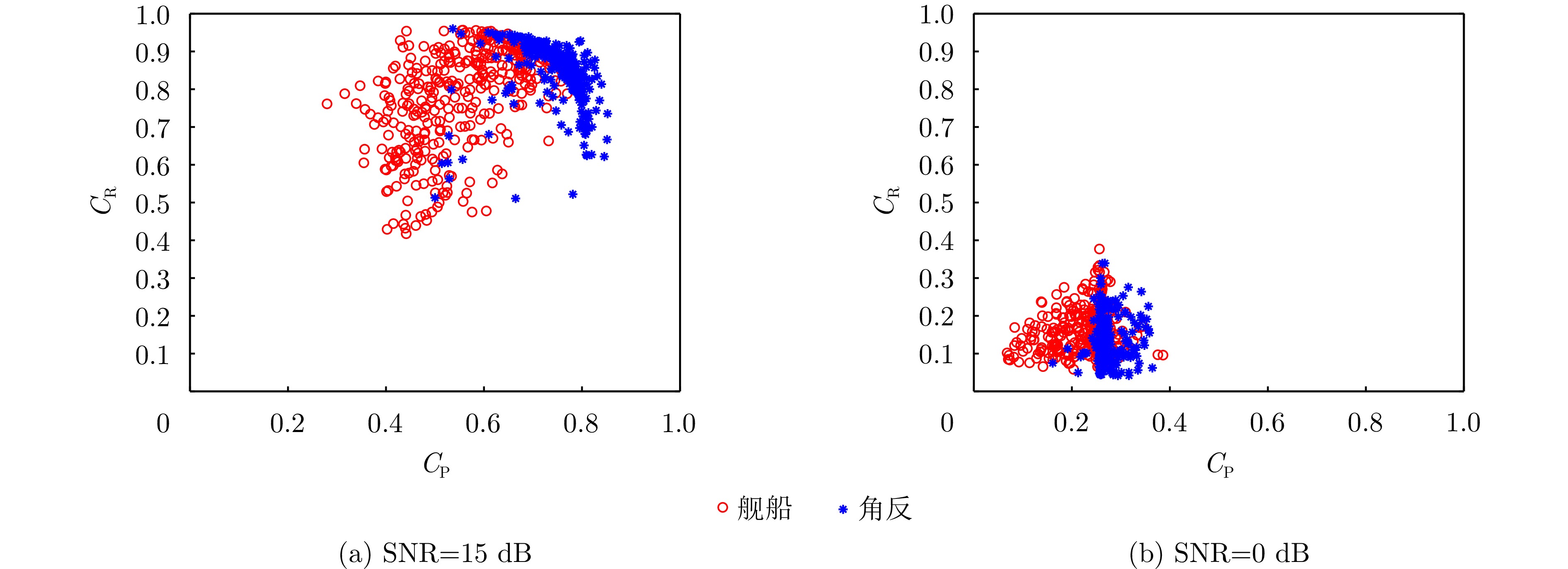
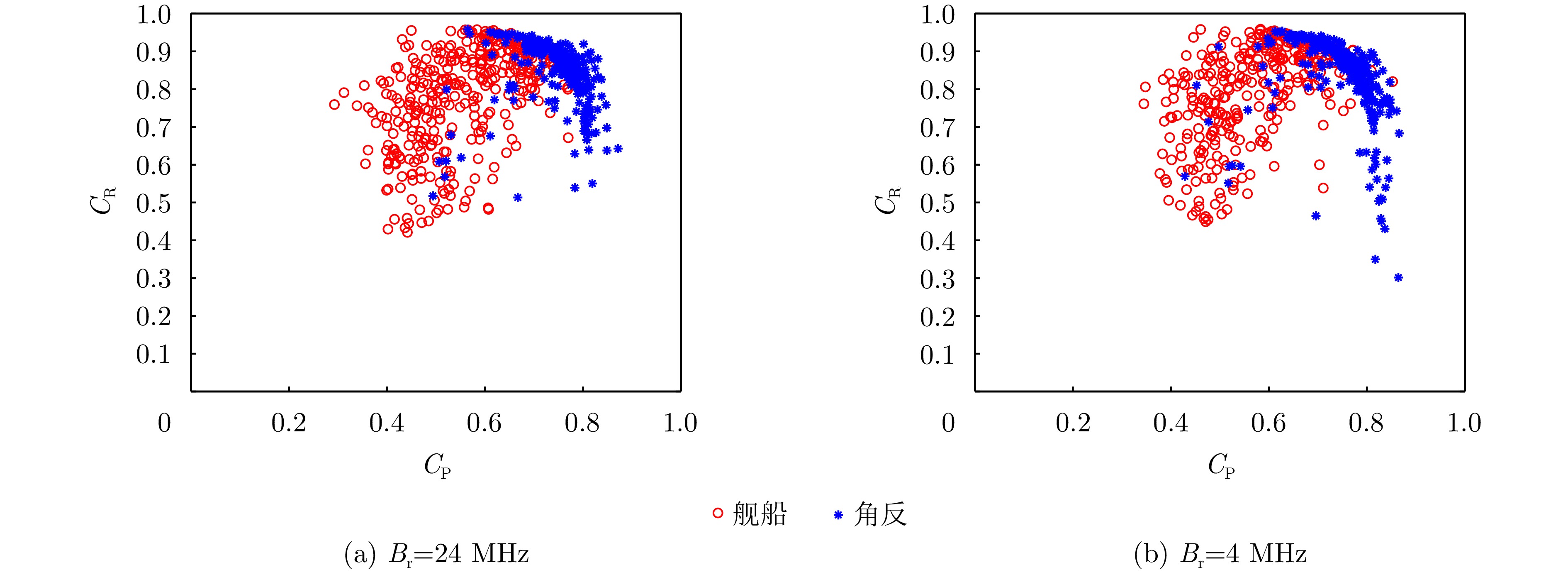
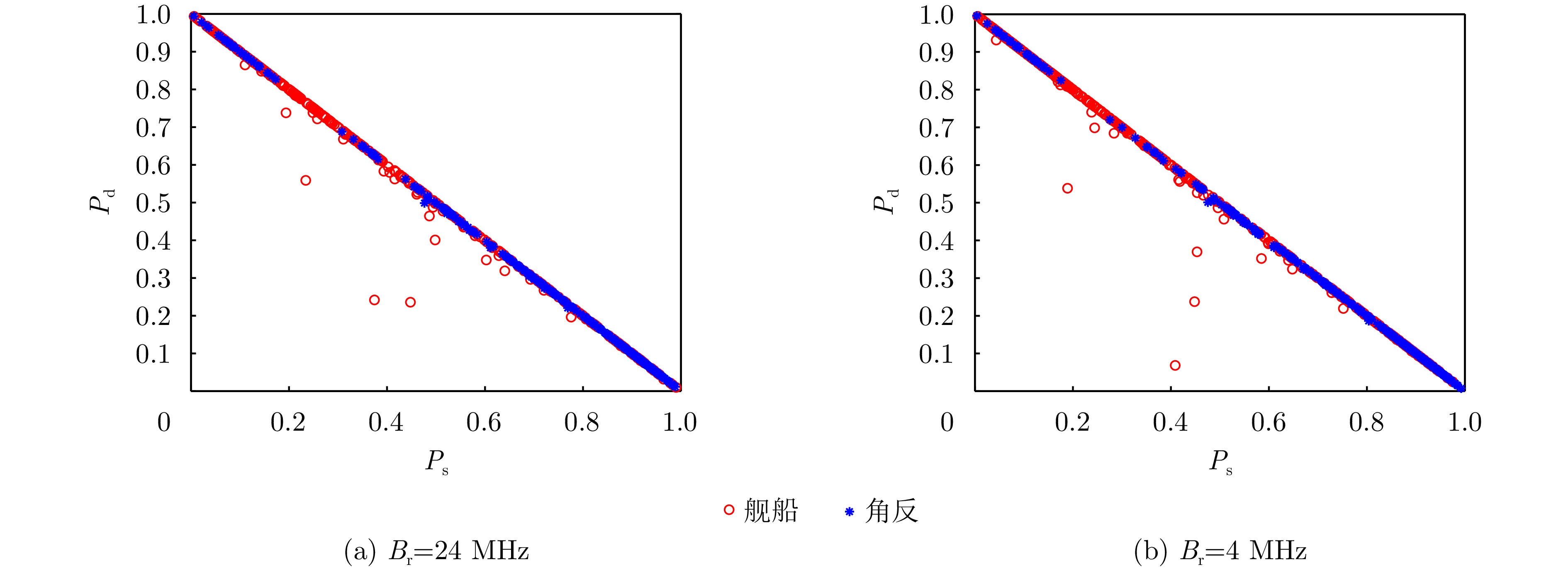
图 21 舰船和角反相关特征参数的二维表征结果(SNR=15 dB, ${f_{\text{s}}} = 100\;{\text{MHz}}$)
Figure 21. 2D characterization results of the ship and corner reflector correlation parameters (SNR=15 dB, ${f_{\text{s}}} = 100\;{\text{MHz}}$)
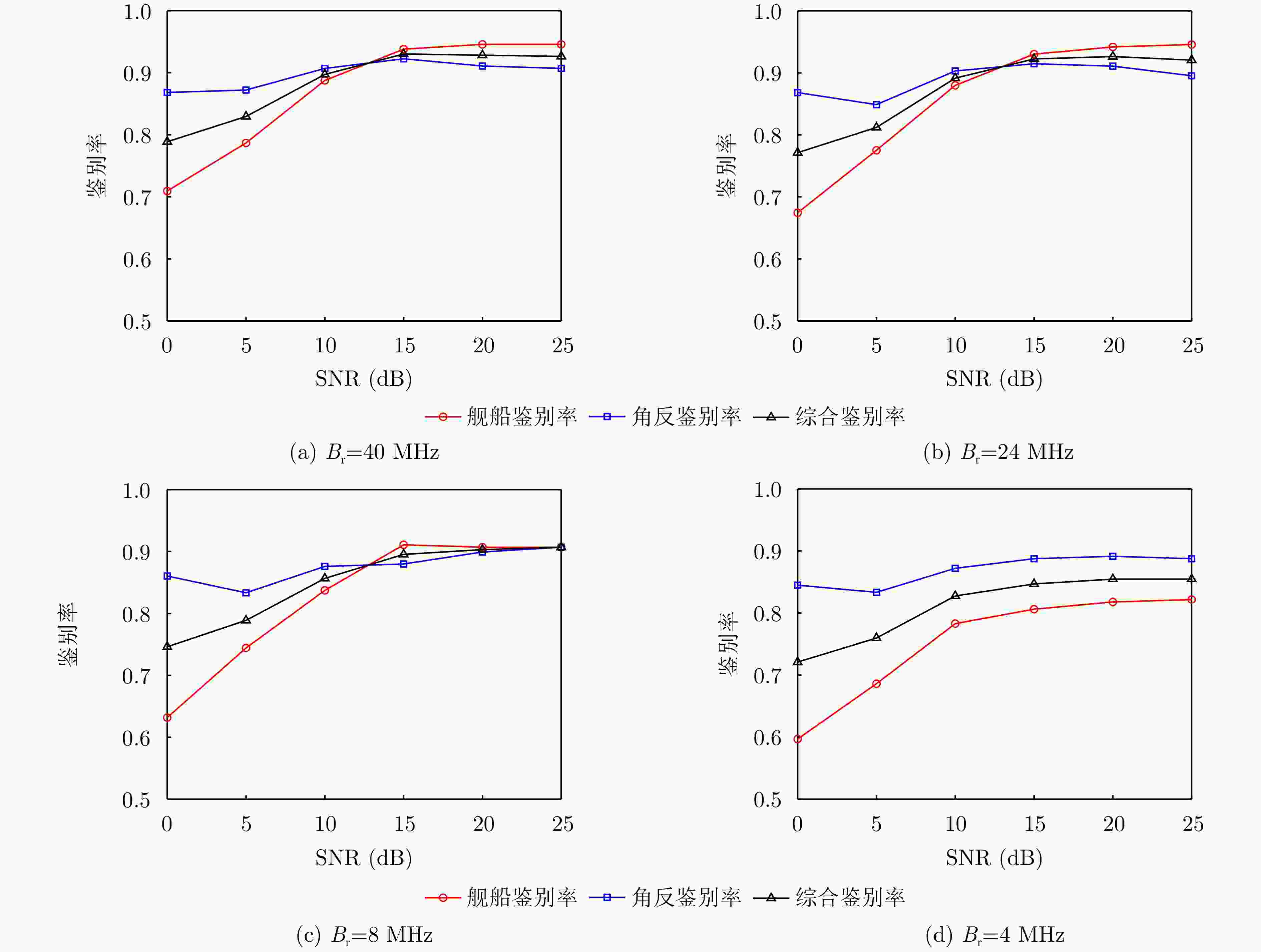
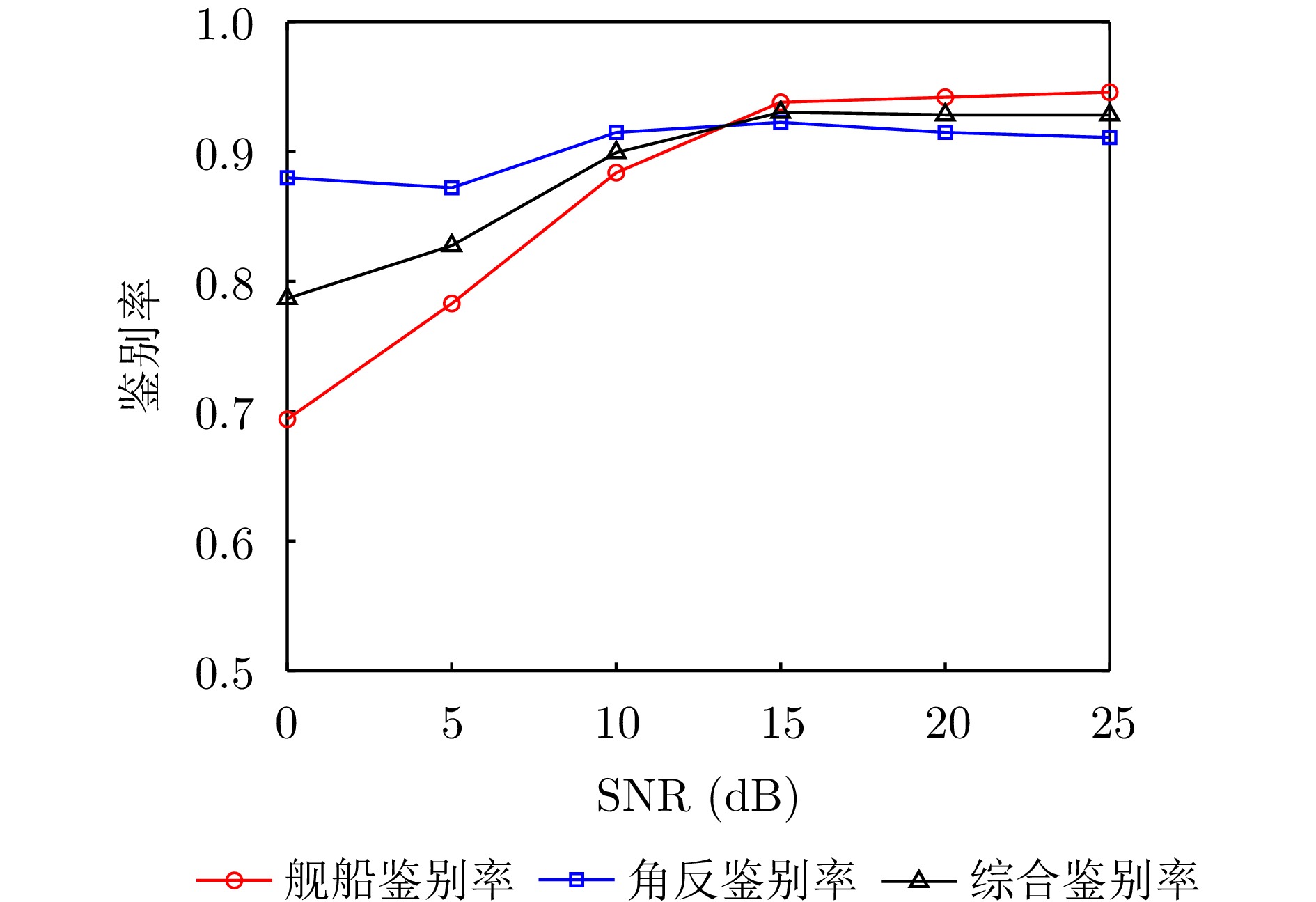
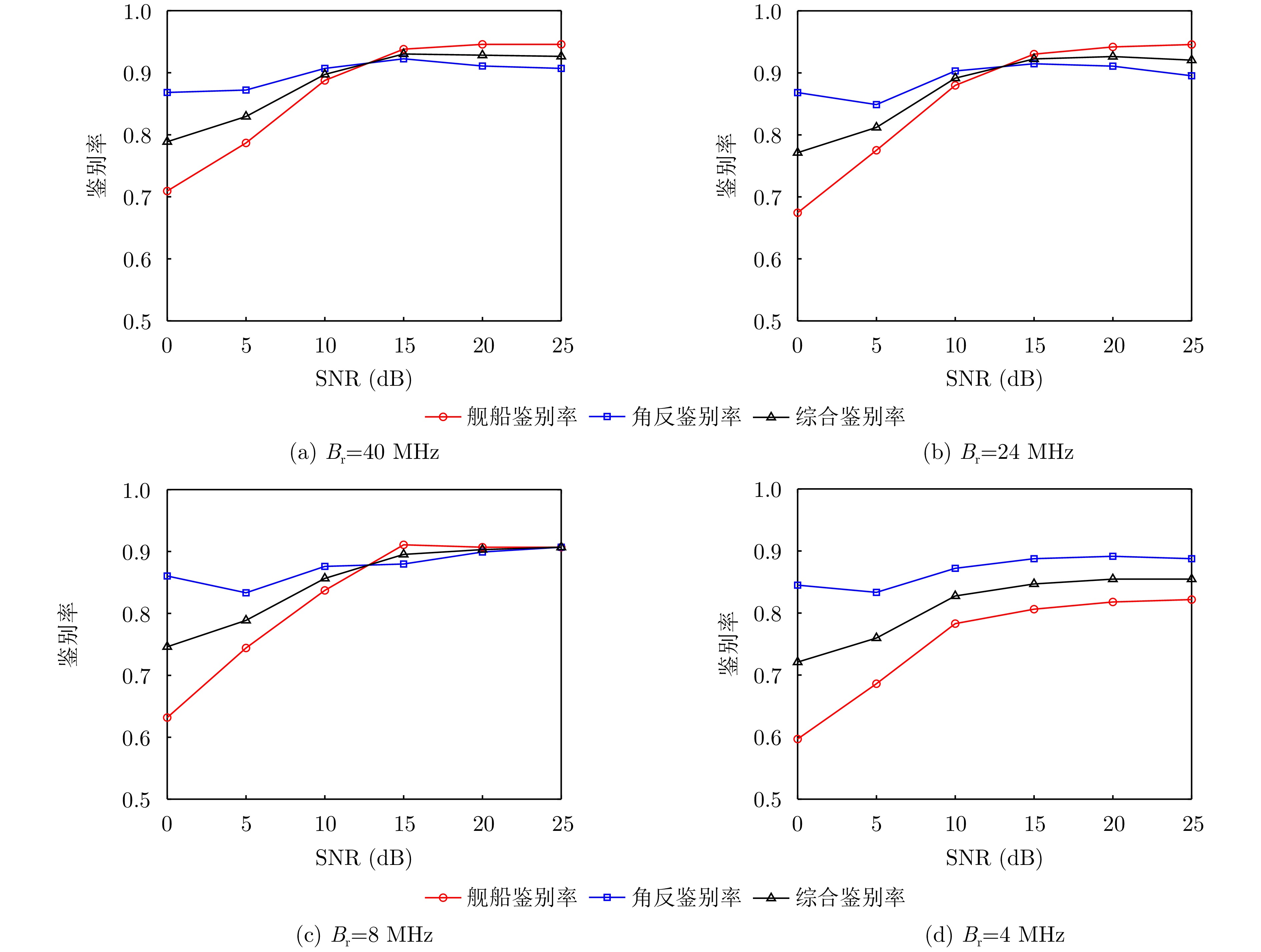
图 22 鉴别率随SNR的变化曲线(${f_{\text{s}}} = 100\;{\text{MHz}}$)
Figure 22. Curves of identification rate changes with SNR (${f_{\text{s}}} = 100\;{\text{MHz}}$)
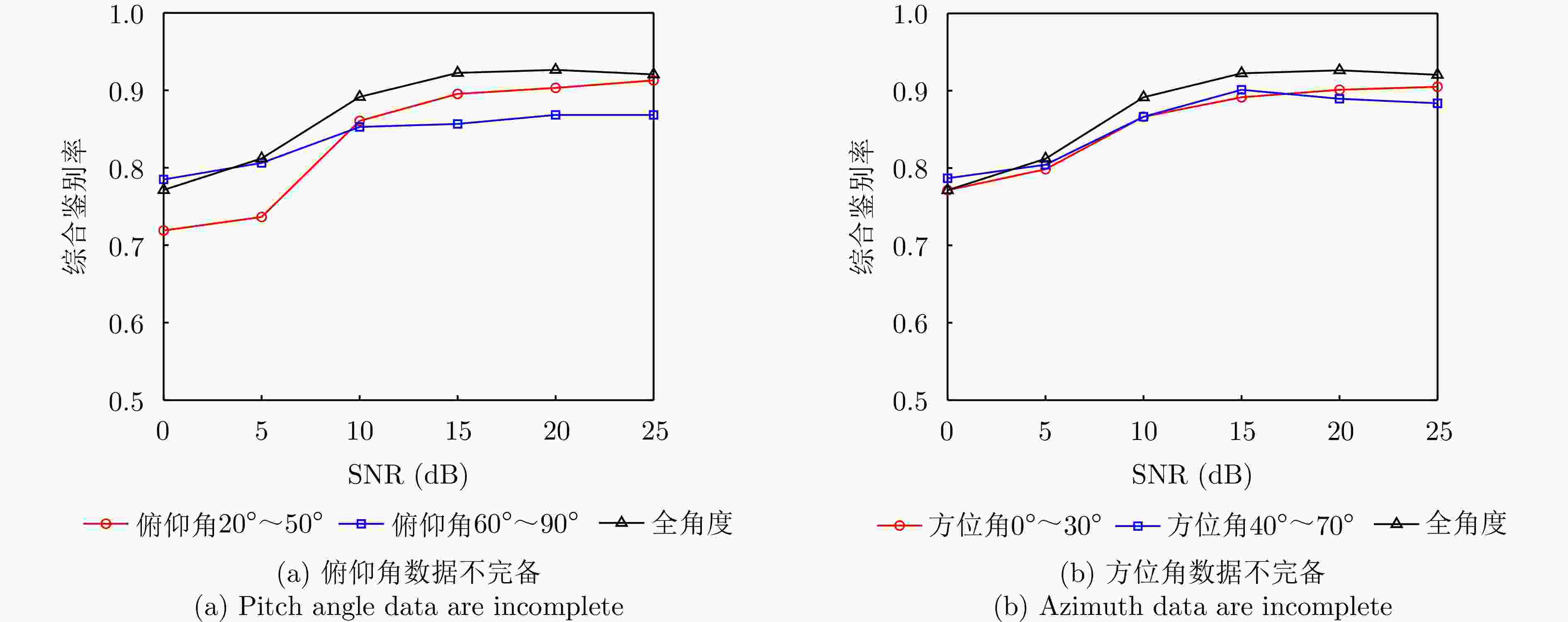
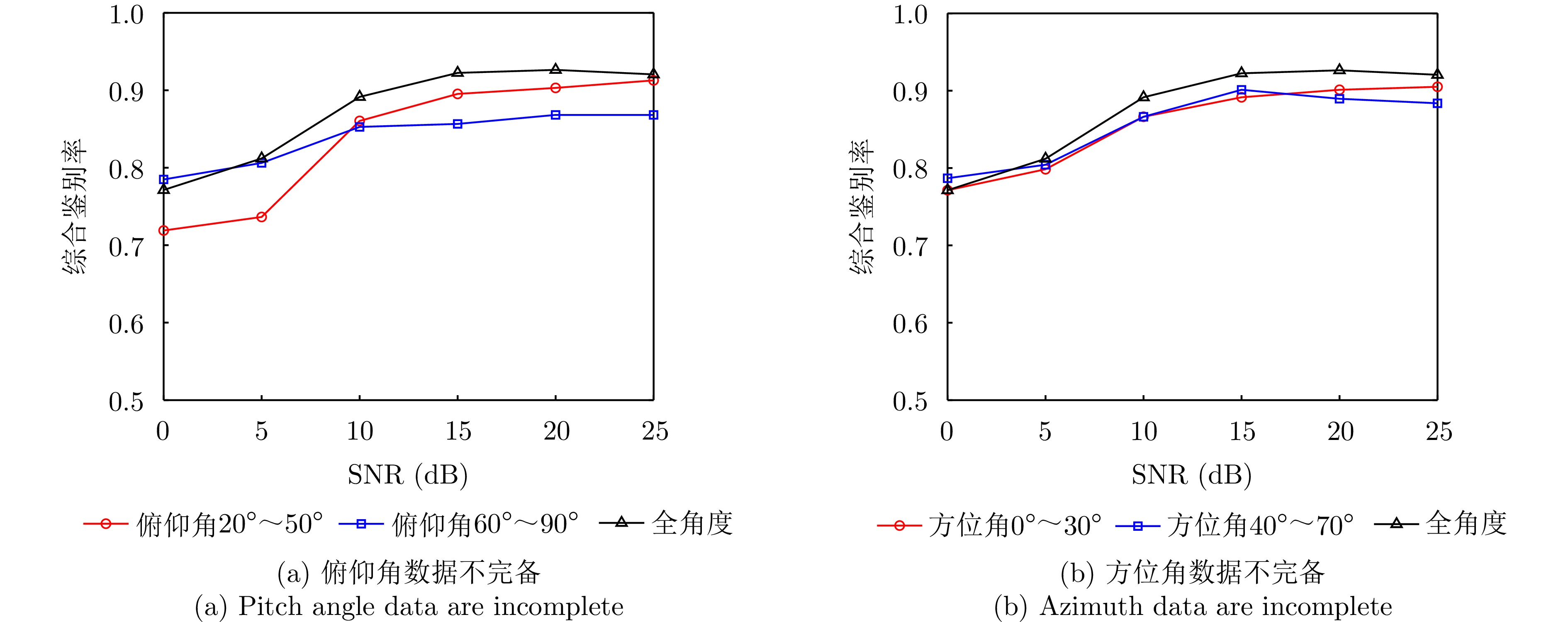
图 23 综合鉴别率随SNR的变化曲线(训练集不完备)
Figure 23. Curves of identification rate changes with SNR (the training set is incomplete)
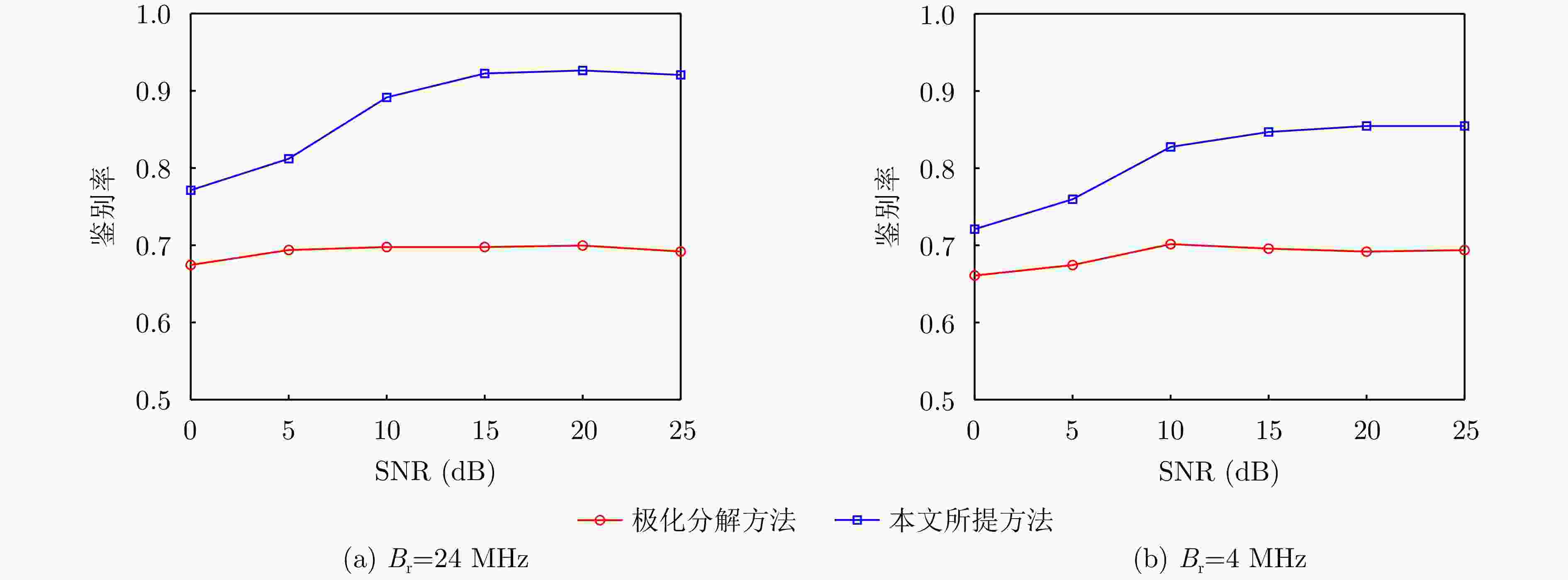
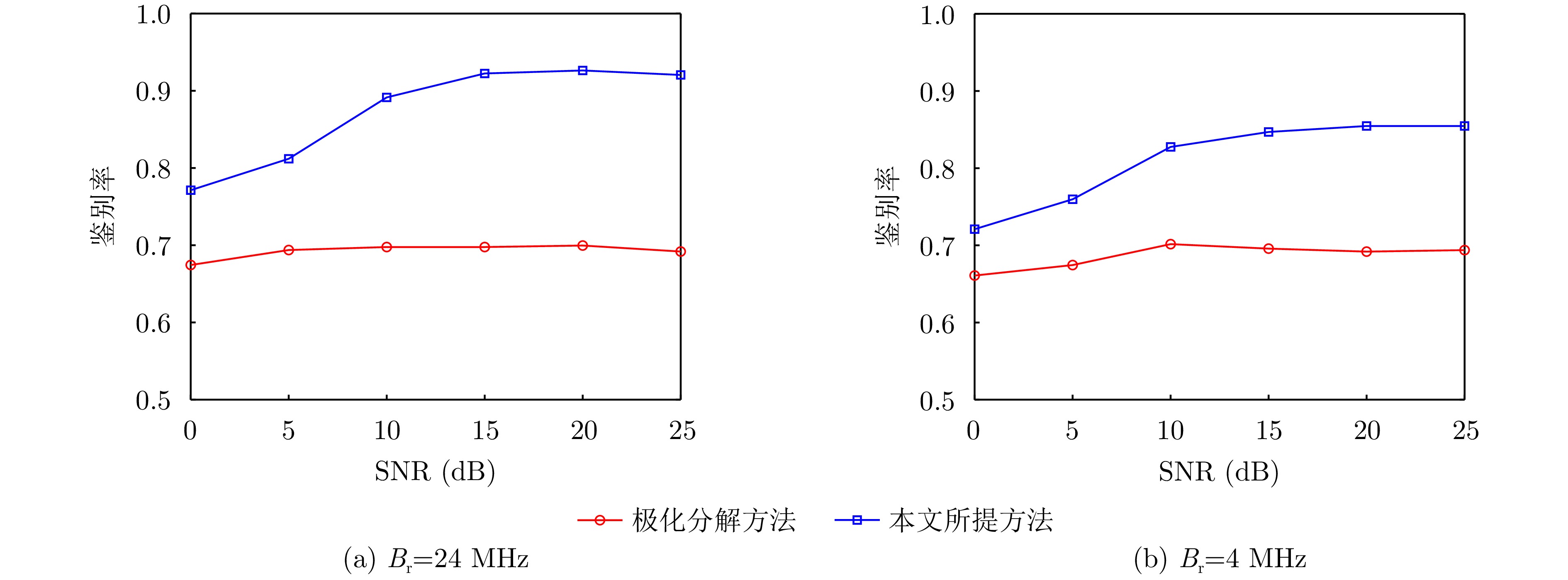
图 24 鉴别率随SNR的变化曲线(${f_{\text{s}}} = 100\;{\text{MHz}}$,方法比较)
Figure 24. Curves of identification rate changes with SNR (${f_{\text{s}}} = 100\;{\text{MHz}}$, comparison)
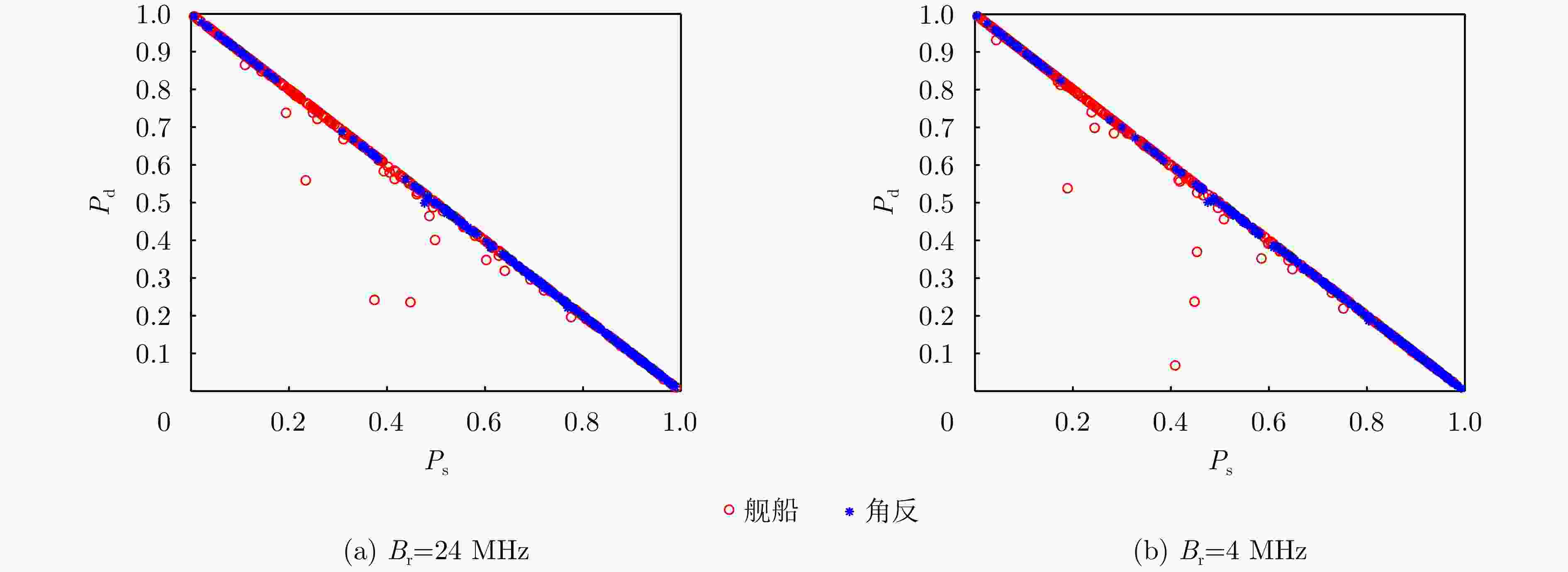
图 25 舰船和角反相关特征参数的二维表征结果(SNR=15 dB,${f_{\text{s}}} = 100\;{\text{MHz}}$,极化分解方法)
Figure 25. 2D characterization results of the ship and corner reflector correlation parameters (SNR=15 dB, ${f_{\text{s}}} = 100\;{\text{MHz}}$, polarimetric decomposition)
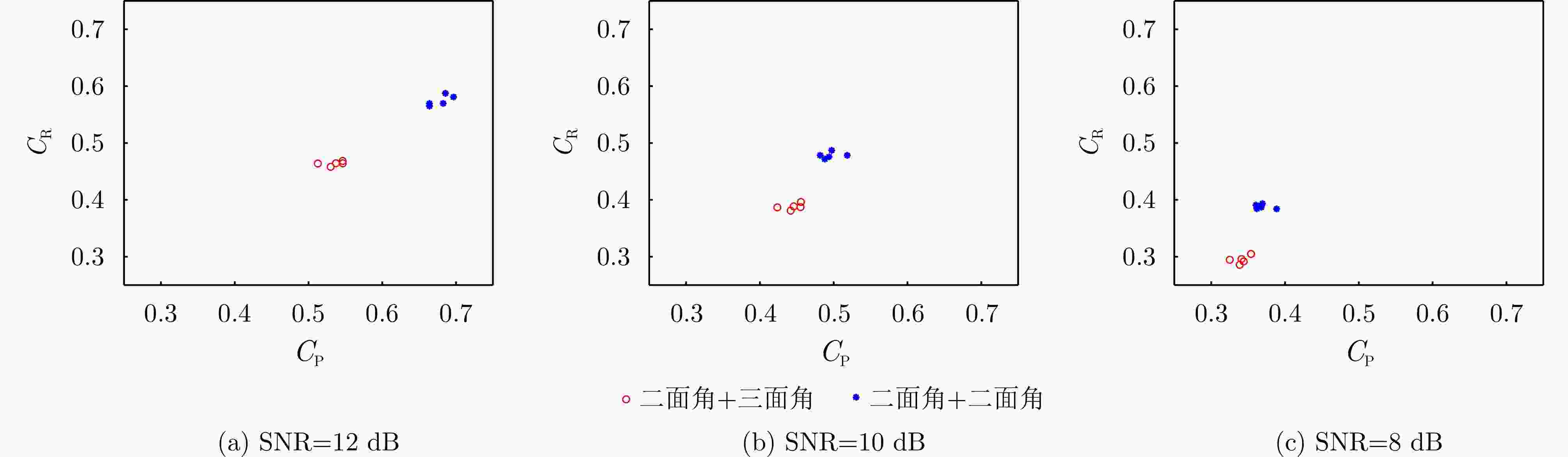
图 29 两类场景暗室数据相关特征参数的二维表征结果(5组数据)
Figure 29. Correlation parameter 2D characterization results of two cases of the measured data (five sets of data)
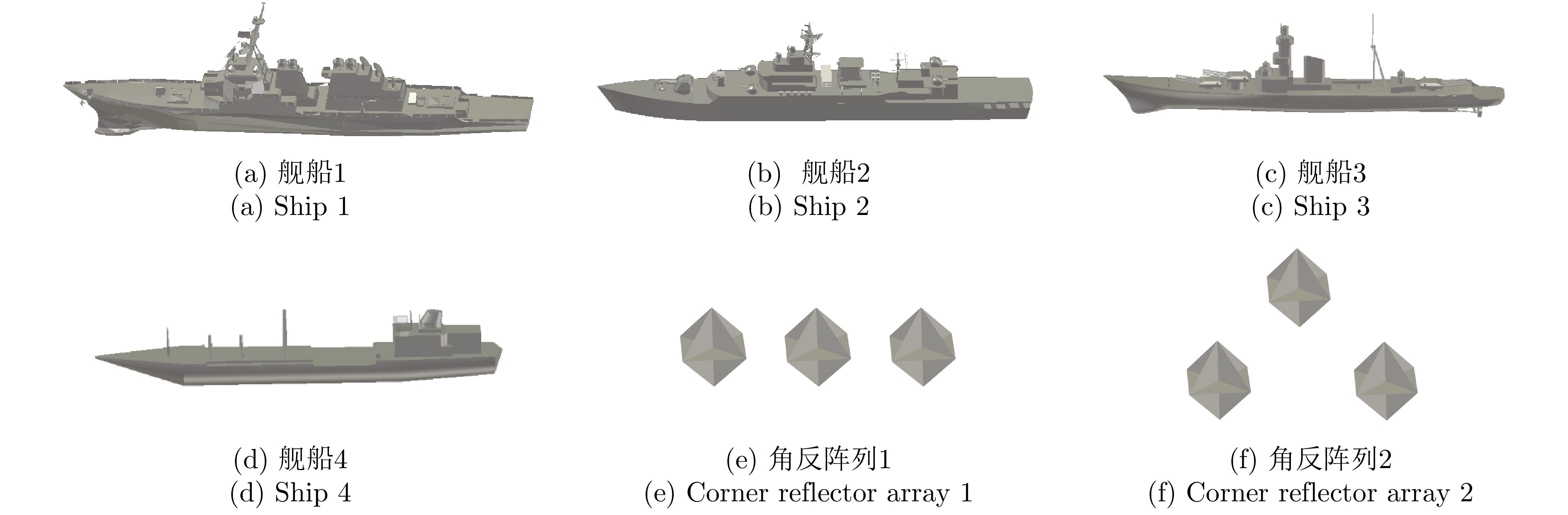
表 1 4种舰船模型的尺寸参数(m)
Table 1. Size of four ship models (m)
种类 长度 宽度 高度 舰船1 169.69 22.90 56.25 舰船2 145.36 17.74 34.27 舰船3 107.74 11.39 29.14 舰船4 130.80 10.00 23.30  下载: 导出CSV
下载: 导出CSV
表 2 鉴别率随SNR的变化统计表(Br= 40 MHz, fs= 1 GHz)
Table 2. The table of identification rate changes with SNR (Br= 40 MHz, fs= 1 GHz)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 舰船鉴别率 69.38% 78.29% 88.37% 93.80% 94.19% 94.57% 角反鉴别率 87.98% 87.21% 91.47% 92.25% 91.47% 91.09% 综合鉴别率 78.68% 82.75% 89.92% 93.02% 92.83% 92.83%
下载: 导出CSV
表 3 鉴别率随Br的变化统计表(SNR=15 dB, fs = 1 GHz)
Table 3. The table of identification rate changes with Br (SNR=15 dB, fs = 1 GHz)
鉴别率 Br=4 MHz
(1倍)Br=8 MHz
(2倍)Br=16 MHz
(4倍)Br=24 MHz
(6倍)Br=32 MHz
(8倍)Br=40 MHz
(10倍)舰船鉴别率 81.01% 90.31% 91.47% 93.41% 90.70% 93.80% 角反鉴别率 88.37% 88.76% 90.70% 91.09% 91.86% 92.25% 综合鉴别率 84.69% 89.53% 91.09% 92.25% 91.28% 93.02%
下载: 导出CSV
表 5 鉴别率随SNR的变化统计表(Br = 24 MHz, fs = 100 MHz)
Table 5. The table of identification rate changes with SNR (Br = 24 MHz, fs = 100 MHz)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 舰船鉴别率 67.44% 77.52% 87.98% 93.02% 94.19% 94.57% 角反鉴别率 86.82% 84.88% 90.31% 91.47% 91.09% 89.53% 综合鉴别率 77.13% 81.20% 89.15% 92.25% 92.64% 92.05%
下载: 导出CSV
表 6 鉴别率随SNR的变化统计表(Br = 8 MHz, fs = 100 MHz)
Table 6. The table of identification rate changes with SNR (Br = 8 MHz, fs = 100 MHz)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 舰船鉴别率 63.18% 74.42% 83.72% 91.09% 90.70% 90.70% 角反鉴别率 86.05% 83.33% 87.60% 87.98% 89.92% 90.70% 综合鉴别率 74.61% 78.88% 85.66% 89.53% 90.31% 90.70%
下载: 导出CSV
表 4 鉴别率随SNR的变化统计表(Br = 40 MHz, fs = 100 MHz)
Table 4. The table of identification rate changes with SNR (Br = 40 MHz, fs = 100 MHz)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 舰船鉴别率 70.93% 78.68% 88.76% 93.80% 94.57% 94.57% 角反鉴别率 86.82% 87.21% 90.70% 92.25% 91.09% 90.70% 综合鉴别率 78.88% 82.95% 89.73% 93.02% 92.83% 92.64%
下载: 导出CSV
表 7 鉴别率随SNR的变化统计表(Br = 4 MHz, fs = 100 MHz)
Table 7. The table of identification rate changes with SNR (Br = 4 MHz, fs = 100 MHz)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 舰船鉴别率 59.69% 68.60% 78.29% 80.62% 81.78% 82.17% 角反鉴别率 84.50% 83.33% 87.21% 88.76% 89.15% 88.76% 综合鉴别率 72.09% 75.97% 82.75% 84.69% 85.47% 85.47%
下载: 导出CSV
表 8 综合鉴别率随SNR的变化统计表(俯仰角或方位角数据不完备)
Table 8. The table of identification rate changes with SNR (pitch angle or azimuth data are incomplete)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 俯仰角20°~50° 71.90% 73.64% 86.05% 89.53% 90.31% 91.28% 俯仰角60°~90° 78.49% 80.62% 85.27% 85.66% 86.82% 86.82% 方位角0°~30° 77.13% 79.85% 86.63% 89.15% 90.12% 90.50% 方位角40°~70° 78.68% 80.43% 86.63% 90.12% 88.95% 88.37% 综合鉴别率(全角度) 77.13% 81.20% 89.15% 92.25% 92.64% 92.05%
下载: 导出CSV
表 9 鉴别率随SNR的变化统计表(Br = 24 MHz, fs = 100 MHz,方法比较)
Table 9. The table of identification rate changes with SNR (Br = 24 MHz, fs = 100 MHz, comparison)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 极化分解方法 67.44% 69.38% 69.77% 69.77% 69.96% 69.19% 本文所提方法 77.13% 81.20% 89.15% 92.25% 92.64% 92.05% 精度提升 9.69% 11.82% 19.38% 22.48% 22.68% 22.86%
下载: 导出CSV
表 10 鉴别率随SNR的变化统计表(Br = 4 MHz, fs = 100 MHz,方法比较)
Table 10. The table of identification rate changes with SNR (Br = 4 MHz, fs = 100 MHz, comparison)
鉴别率 SNR=0 dB SNR=5 dB SNR=10 dB SNR=15 dB SNR=20 dB SNR=25 dB 极化分解方法 66.09% 67.44% 70.16% 69.57% 69.19% 69.38% 本文所提方法 72.09% 75.97% 82.75% 84.69% 85.47% 85.47% 精度提升 6.00% 8.53% 12.59% 15.12% 16.28% 16.09%
下载: 导出CSV
-
[1] 陈静. 雷达无源干扰原理[M]. 北京: 国防工业出版社, 2009: 42–51.CHEN Jing. Principles of Radar Passive Jamming[M]. Beijing: National Defense Industry Press, 2009: 42–51. [2] 王聘, 胡生亮, 姚强, 等. 浮空式角反射体阵列布放间隔寻优研究[J]. 指挥控制与仿真, 2018, 40(3): 32–35. doi: 10.3969/j.issn.1673-3819.2018.03.008.WANG Pin, HU Shengliang, YAO Qiang, et al. Optimal laying interval of the array of floating-type corner reflectors[J]. Command Control & Simulation, 2018, 40(3): 32–35. doi: 10.3969/j.issn.1673-3819.2018.03.008. [3] 张俊, 胡生亮, 杨庆, 等. 基于RCS幅值特性相似度的浮空式角反射体布放态势寻优[J]. 海军工程大学学报, 2019, 31(2): 32–36. doi: 10.7495/j.issn.1009-3486.2019.02.006.ZHANG Jun, HU Shengliang, YANG Qing, et al. Optimization of position situation of air-floating corner reflectors based on similarity of RCS amplitude characteristic[J]. Journal of Naval University of Engineering, 2019, 31(2): 32–36. doi: 10.7495/j.issn.1009-3486.2019.02.006. [4] 汤广富, 李华, 甘荣兵, 等. 海战场环境下角反射器干扰分析[J]. 电子信息对抗技术, 2015, 30(5): 39–45, 84. doi: 10.3969/j.issn.1674-2230.2015.05.008.TANG Guangfu, LI Hua, GAN Rongbing, et al. Analysis of corner reflector under naval battlefield[J]. Electronic Information Warfare Technology, 2015, 30(5): 39–45, 84. doi: 10.3969/j.issn.1674-2230.2015.05.008. [5] 张志远, 张介秋, 屈绍波, 等. 雷达角反射器的研究进展及展望[J]. 飞航导弹, 2014(4): 64–70. doi: 10.16338/j.issn.1009-1319.2014.04.021.ZHANG Zhiyuan, ZHANG Jieqiu, QU Shaobo, et al. Research progress and prospect of radar corner reflector[J]. Aerodynamic Missile Journal, 2014, (4): 64–70. doi: 10.16338/j.issn.1009-1319.2014.04.021. [6] 吴林罡, 胡生亮, 刘忠, 等. 舰载射频角反射器装备现状与发展趋势[J]. 现代防御技术, 2023, 51(6): 36–44. doi: 10.3969/j.issn.1009-086x.2023.06.005.WU Lingang, HU Shengliang, LIU Zhong, et al. Present situation and development trend of shipborne RF corner reflector equipment[J]. Modern Defense Technology, 2023, 51(6): 36–44. doi: 10.3969/j.issn.1009-086x.2023.06.005. [7] ZHOU Xiao, ZHU Jiyue, YU Weming, et al. Time-domain shooting and bouncing rays method based on beam tracing technique[J]. IEEE Transactions on Antennas and Propagation, 2015, 63(9): 4037–4048. doi: 10.1109/TAP.2015.2448757. [8] YUAN Haodong, FU Xiongjun, ZHAO Congxia, et al. Ship and corner reflector identification based on extreme learning machine[C]. 2019 IEEE International Conference on Signal, Information and Data Processing, Chongqing, China, 2019: 1–5. doi: 10.1109/ICSIDP47821.2019.9173150. [9] 吕方方. 海面目标动态回波仿真与特性分析[D]. [硕士论文], 西安电子科技大学, 2019. doi: 10.27389/d.cnki.gxadu.2019.002034.LV Fangfang. Dynamic echo simulation and characteristic analysis of sea surface targets[D]. [Master dissertation], Xidian University, 2019. doi: 10.27389/d.cnki.gxadu.2019.002034. [10] 朱珍珍, 汤广富, 程翥, 等. 基于极化分解的舰船和角反射器鉴别方法[J]. 舰船电子对抗, 2010, 33(6): 15–21. doi: 10.16426/j.cnki.jcdzdk.2010.06.022.ZHU Zhenzhen, TANG Guangfu, CHENG Zhu, et al. Discrimination method of ship and corner reflector based on polarization decomposition[J]. Shipboard Electronic Countermeasure, 2010, 33(6): 15–21. doi: 10.16426/j.cnki.jcdzdk.2010.06.022. [11] 张俊, 胡生亮, 范学满, 等. 基于HRRP和PA的浮空式角反射体布放态势寻优[J]. 战术导弹技术, 2018(3): 105–109. doi: 10.16358/j.issn.1009-1300.2018.7.167.ZHANG Jun, HU Shengliang, FAN Xueman, et al. Optimization of the position situation of the air-floating corner reflector based on HRRP and PA[J]. Tactical Missile Technology, 2018(3): 105–109. doi: 10.16358/j.issn.1009-1300.2018.7.167. [12] 潘哲. 一种反舰导弹抗无源假目标干扰算法[J]. 海军航空工程学院学报, 2010, 25(3): 285–288. doi: 10.3969/j.issn.1673-1522.2010.03.011.PAN Zhe. An anti-jamming algorithm for passive false targets of anti-ship missile[J]. Journal of Naval Aeronautical and Astronautical University, 2010, 25(3): 285–288. doi: 10.3969/j.issn.1673-1522.2010.03.011. [13] CUI Kaibo, WANG Wei, CHEN Xi, et al. A kind of method of anti-corner reflector interference for millimeter wave high resolution radar system[C]. 2016 Progress in Electromagnetic Research Symposium, Shanghai, China, 2016: 1900–1906. doi: 10.1109/PIERS.2016.7734824. [14] 黄孟俊, 赵宏钟, 付强, 等. 一种基于微多普勒特征的海面角反射器干扰鉴别方法[J]. 宇航学报, 2012, 33(10): 1486–1491. doi: 10.3873/j.issn.1000-1328.2012.10.018.HUANG Mengjun, ZHAO Hongzhong, FU Qiang, et al. A sea corner-reflector jamming identification method based on micro-Doppler feature[J]. Journal of Astronautics, 2012, 33(10): 1486–1491. doi: 10.3873/j.issn.1000-1328.2012.10.018. [15] 黄孟俊, 陈建军, 赵宏钟, 等. 海面角反射器干扰微多普勒建模与仿真[J]. 系统工程与电子技术, 2012, 34(9): 1781–1787. doi: 10.3969/j.issn.1001-506x.2012.09.06.HUANG Mengjun, CHEN Jianjun, ZHAO Hongzhong, et al. Micro-doppler modeling and simulating of corner reflector in sea surface[J]. Systems Engineering and Electronics, 2012, 34(9): 1781–1787. doi: 10.3969/j.issn.1001-506x.2012.09.06. [16] ZHU Hong, WANG Qingping, PAN Yujian, et al. A sea corner-reflector jamming identification method based on time-frequency feature[C]. 2015 IEEE International Conference on Signal Processing, Communications and Computing, Ningbo, China, 2015: 1–6. doi: 10.1109/ICSPCC.2015.7338803. [17] HURTADO M and NEHORAI A. Polarimetric detection of targets in heavy inhomogeneous clutter[J]. IEEE Transactions on Signal Processing, 2008, 56(4): 1349–1361. doi: 10.1109/TSP.2007.909046. [18] NOVAK L M, SECHTIN M B, and CARDULLO M J. Studies of target detection algorithms that use polarimetric radar data[J]. IEEE Transactions on Aerospace and Electronic Systems, 1989, 25(2): 150–165. doi: 10.1109/7.18677. [19] JIONG Chen and JIAN Yang. Super-resolution of polarimetric SAR images for ship detection[C]. 2007 International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Hangzhou, China, 2007: 1499–1502. doi: 10.1109/MAPE.2007.4393565. [20] WANG Luoshengbin, XU Zhenhai, DONG Wei, et al. A scheme of polarimetric superresolution for multitarget detection and localization[J]. IEEE Signal Processing Letters, 2021, 28: 439–443. doi: 10.1109/LSP.2021.3058007. [21] YIN Jiapeng, CHEN Haonan, LI Yongzhen, et al. Clutter mitigation based on spectral depolarization ratio for dual-polarization weather radars[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 6131–6145. doi: 10.1109/JSTARS.2021.3088324. [22] MA Jiazhi, SHI Longfei, LI Yongzhen, et al. Angle estimation of extended targets in main-lobe interference with polarization filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 169–189. doi: 10.1109/TAES.2017.2649783. [23] SHARMA J J, HAJNSEK I, PAPATHANASSIOU K P, et al. Polarimetric decomposition over glacier ice using long-wavelength airborne polSAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(1): 519–535. doi: 10.1109/TGRS.2010.2056692. [24] PALLOTTA L and ORLANDO D. Polarimetric covariance eigenvalues classification in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(5): 746–750. doi: 10.1109/LGRS.2018.2881485. [25] LIANG Zhuorui, WANG Yong, ZHANG Xiaofeng, et al. Identification of ship and corner reflector in sea clutter environment[C]. 2020 15th IEEE International Conference on Signal Processing, Beijing, China, 2020: 622–626. doi: 10.1109/ICSP48669.2020.9321063. [26] CHEN Siwei, WANG Xuesong, and SATO M. Uniform polarimetric matrix rotation theory and its applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4756–4770. doi: 10.1109/TGRS.2013.2284359. [27] 陈思伟, 李永祯, 王雪松, 等. 极化SAR目标散射旋转域解译理论与应用[J]. 雷达学报, 2017, 6(5): 442–455. doi: 10.12000/JR17033.CHEN Siwei, LI Yongzhen, WANG Xuesong, et al. Polarimetric SAR target scattering interpretation in rotation domain: Theory and application[J]. Journal of Radars, 2017, 6(5): 442–455. doi: 10.12000/JR17033. [28] 李郝亮, 陈思伟, 王雪松. 海面角反射器的极化旋转域特性研究[J]. 系统工程与电子技术, 2022, 44(7): 2065–2073. doi: 10.12305/j.issn.1001-506X.2022.07.01.LI Haoliang, CHEN Siwei, and WANG Xuesong. Study on characterization of sea corner reflectors in polarimetric rotation domain[J]. Systems Engineering and Electronics, 2022, 44(7): 2065–2073. doi: 10.12305/j.issn.1001-506X.2022.07.01. [29] 涂建华, 汤广富, 肖怀铁, 等. 基于极化分解的抗角反射器干扰研究[J]. 雷达科学与技术, 2009, 7(2): 85–90. doi: 10.3969/j.issn.1672-2337.2009.02.002.TU Jianhua, TANG Guangfu, XIAO Huaitie, et al. A study of anti-corner reflector based on polarization decomposition[J]. Radar Science and Technology, 2009, 7(2): 85–90. doi: 10.3969/j.issn.1672-2337.2009.02.002. [30] LIANG Ziyao, YU Yong, and ZHANG Bin. Anti-corner reflector array method based on Pauli polarization decomposition and BP neural network[C]. 2021 IEEE 2nd International Conference on Pattern Recognition and Machine Learning, Chengdu, China, 2021: 1–5. doi: 10.1109/PRML52754.2021.9520744. [31] FANG Maojin, ZHU Yongfeng, HUANG Mengjun, et al. Sea surface target polarization feature extraction based on modified odd-time and even-time scattering models[C]. 2013 2nd International Conference on Measurement, Information and Control, Harbin, China, 2013: 500–504. doi: 10.1109/MIC.2013.6758013. [32] 王罗胜斌, 王雪松, 徐振海. 雷达极化域调控超分辨的原理与方法[J]. 中国科学: 信息科学, 2023, 53(4): 993–1007. doi: 10.1360/SSI-2022-0141.WANG Luoshengbin, WANG Xuesong, and XU Zhenhai. Principle and approach to polarization modulation for radar super-resolution[J]. SCIENTIA SINICA Informationis, 2023, 53(4): 993–1007. doi: 10.1360/SSI-2022-0141. [33] 吴国庆, 王罗胜斌, 庞晨, 等. 雷达极化域变焦角反组合体对抗方法: 抗冲淡式干扰[J]. 电子学报, 2022, 50(12): 2969–2983. doi: 10.12263/DZXB.20220979.WU Guoqing, WANG Luoshengbin, PANG Chen, et al. Radar polarization modulation countermeasures for combined corner reflector: Anti diluted jamming[J]. Acta Electronica Sinica, 2022, 50(12): 2969–2983. doi: 10.12263/DZXB.20220979. [34] 韩静雯, 杨勇, 连静, 等. 基于极化与距离像特征融合的雷达导引头角反射器鉴别方法[J/OL]. 系统工程与电子技术. http://kns.cnki.net/kcms/detail/11.2422.tn.20230928.1538.012.html, 2024.HAN Jingwen, YANG Yong, LIAN Jing, et al. Identification method of corner reflector based on polarization and HRRP feature fusion for radar seeker[J/OL]. Systems Engineering and Electronics. http://kns.cnki.net/kcms/detail/11.2422.tn.20230928.1538.012.html, 2024. [35] SKOLNIK M I. Radar Handbook[M]. 3rd ed. New York: McGraw-Hill, 2008: 909–937. [36] 彭祥龙. 船用导航雷达的技术发展及最新应用[J]. 电讯技术, 2013, 53(9): 1247–1252. doi: 10.3969/j.issn.1001-893x.2013.09.025.PENG Xianglong. Technology evolution and new applications of marine navigation radar[J]. Telecommunication Engineering, 2013, 53(9): 1247–1252. doi: 10.3969/j.issn.1001-893x.2013.09.025. [37] 刘文明. 船用导航雷达技术现状与发展展望(上篇)[J]. 船舶经济贸易, 2020(12): 35–40.LIU Wenming. The status and prospect of marine radar technology (Part 1)[J]. Ship Economy & Trade, 2020(12): 35–40. [38] 刘文明. 船用导航雷达技术现状与发展展望(下篇)[J]. 船舶经济贸易, 2021(2): 26–33.LIU Wenming. The status and prospect of marine radar technology (Part 2)[J]. Ship Economy & Trade, 2021(2): 26–33. [39] ZHU Di, XU Zhiming, LI Nanjun, et al. Principles and methods of radar super-resolution based on instantaneous polarization response[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5110116. doi: 10.1109/TGRS.2023.3323411. [40] RICHARDS M A. Fundamentals of Radar Signal Processing[M]. New York: McGraw-Hill, 2005: 20–21. [41] 吴林罡, 胡生亮, 张俊, 等. 双棱锥型角反射器RCS快速预估方法[J]. 战术导弹技术, 2021(5): 29–35. doi: 10.16358/j.issn.1009-1300.2021.1.108.WU Lingang, HU Shengliang, ZHANG Jun, et al. Fast RCS estimation method for bipyramid corner reflector[J]. Tactical Missile Technology, 2021(5): 29–35. doi: 10.16358/j.issn.1009-1300.2021.1.108. [42] YANG Junyou, PENG Yingning, and LIN Shiming. Similarity between two scattering matrices[J]. Electronics Letters, 2001, 37(3): 193–194. doi: 10.1049/el:20010104. [43] 房茂金. 基于极化相参雷达的抗组合干扰技术研究[D]. [硕士论文], 国防科学技术大学, 2013.FANG Maojin. Study on the suppression of compound jamming based on polarization coherent radar[D]. [Master dissertation], National University of Defense Technology, 2013. [44] 周志华. 机器学习[M]. 北京: 清华大学出版社, 2016: 121–139.ZHOU Zhihua. Machine Learning[M]. Beijing: Tsinghua University Press, 2016: 121–139. [45] DE ROSAL IGNATIUS MOSES SETIADI, RAHARDWIKA D S, RACHMAWANTO E H, et al. Effect of feature selection on the accuracy of music genre classification using SVM classifier[C]. 2020 International Seminar on Application for Technology of Information and Communication, Semarang, Indonesia, 2020: 7–11. doi: 10.1109/iSemantic50169.2020.9234222. [46] 张学工. 关于统计学习理论与支持向量机[J]. 自动化学报, 2000, 26(1): 32–42. doi: 10.16383/j.aas.2000.01.005.ZHANG Xuegong. Introduction to statistical learning theory and support vector machines[J]. Acta Automatica Sinica, 2000, 26(1): 32–42. doi: 10.16383/j.aas.2000.01.005. [47] 舒鹏云. 民用航海雷达占空比在信号分选中的应用[J]. 兵工自动化, 2015, 34(4): 52–55. doi: 10.7690/bgzdh.2015.04.015.SHU Pengyun. Application of civil marine radar’s duty ratio in de-interleaving process[J]. Ordnance Industry Automation, 2015, 34(4): 52–55. doi: 10.7690/bgzdh.2015.04.015. -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

