
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
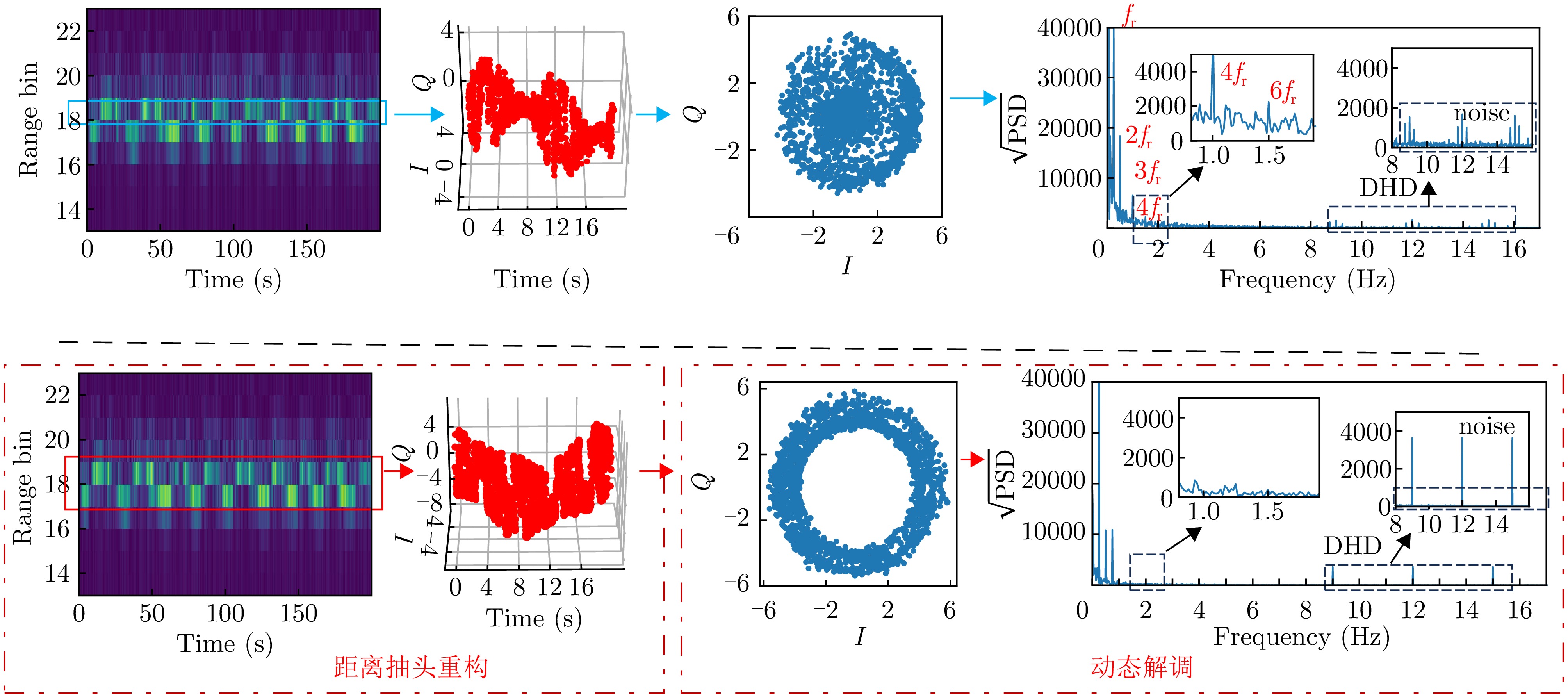
摘要: 在无感雷达体征监测中,与连续波(CW)雷达相比,调频式雷达(如FMCW和UWB)能实现对目标与杂波在距离上的有效区分。通过距离傅里叶变换,可以从不同距离区间提取出准静态目标的心跳和呼吸信号,从而提高监测精度。在已有研究中被广泛使用的距离快速傅里叶变换(FFT)存在一些缺陷:首先,当受试者的呼吸幅度过大,胸腔反射面可能会跨越距离仓的边界,从而影响信号的完整性。其次,受试者的呼吸运动会对生理信号造成幅度上的调制,不利于体征信号的波形恢复。基于上述原因该文提出了基于距离抽头重构和动态解调的算法架构,针对上述两种情况,在仿真和实验中对算法性能进行了评估。仿真分析表明发生跨距离仓的信号经过所提出算法处理后,信噪比(SNR)提升了17±5 dB。此外,实验通过获取8名受试者的多普勒心跳图(DHD)信号,定量分析了DHD信号与心冲击图 (BCG)的一致性,DHD信号中心跳间隔相对于BCG信号的心跳间隔的均方根误差(RMSE)为21.58±13.26 ms (3.40%±2.08%)。Abstract: In non-inductive radar vital sign monitoring, frequency-modulated radars (such as Frequency Modulated Continuous Wave (FMCW) and Ultra-WideBand (UWB)) are more effective than Continuous Wave (CW) radars at distinguishing targets from clutter in terms of distance. Using range Fourier transform, the heartbeat and breathing signals can be extracted from quasi-static targets across various distance intervals, thereby improving monitoring accuracy. However, the commonly used range Fast Fourier Transform (FFT) presents certain limitations: The breathing amplitude of the subject may cross the range bin boundary, compromising signal integrity, while breathing movements can cause amplitude modulation of physiological signals, hindering waveform recovery. To address these reasons, we propose an algorithm architecture featuring range tap reconstruction and dynamic demodulation. We tested the algorithm performance in simulations and experiments for the cross range bin cases. Simulation results indicate that processing signals crossing range bins with our algorithm improves the signal-to-noise ratio by 17±5 dB. In addition, experiments recorded Doppler Heartbeat Diagram (DHD) signals from eight subjects, comparing the consistency between the DHD signals and the ballistocardiogram. The root means square error of the C-C interval in the DHD signal relative to the J-J interval in the BallistoCardioGram (BCG) signal was 21.58±13.26 ms (3.40%±2.08%).
-
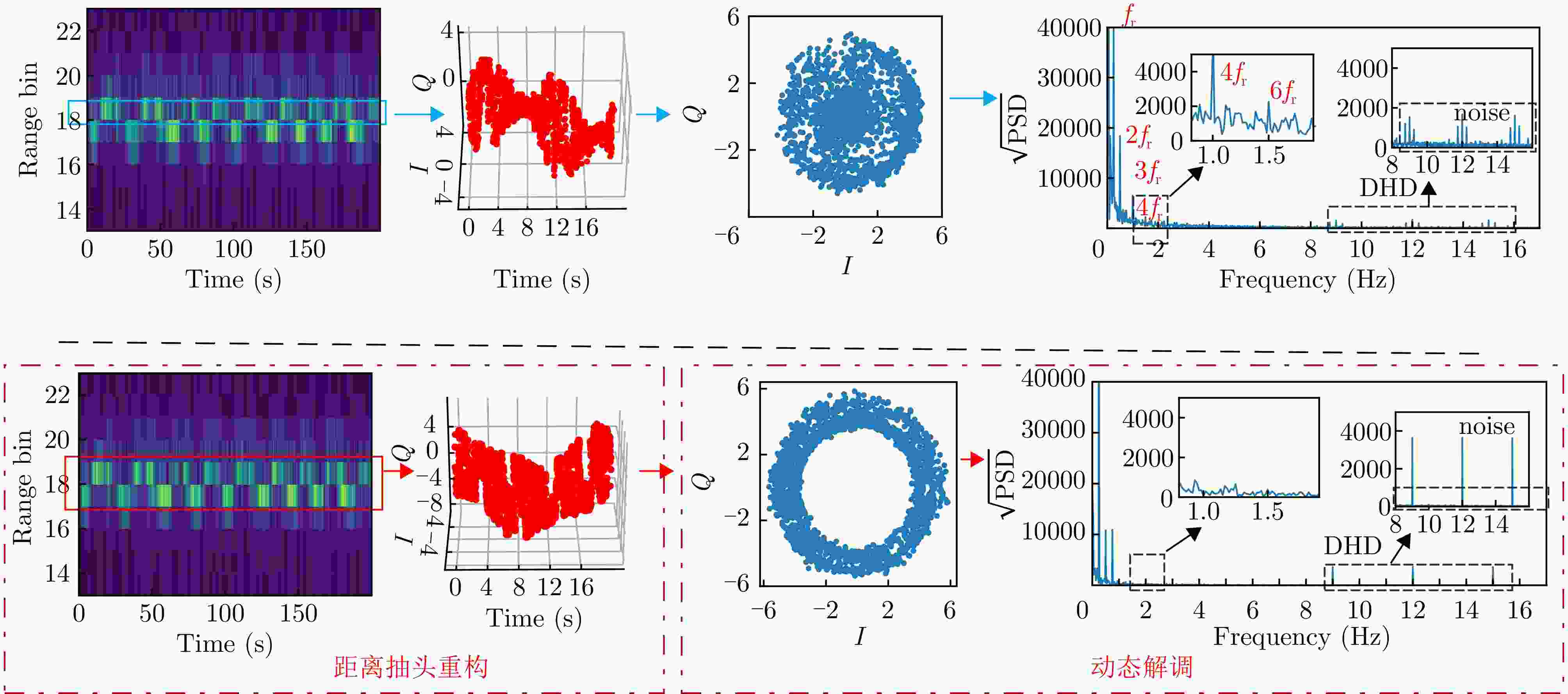
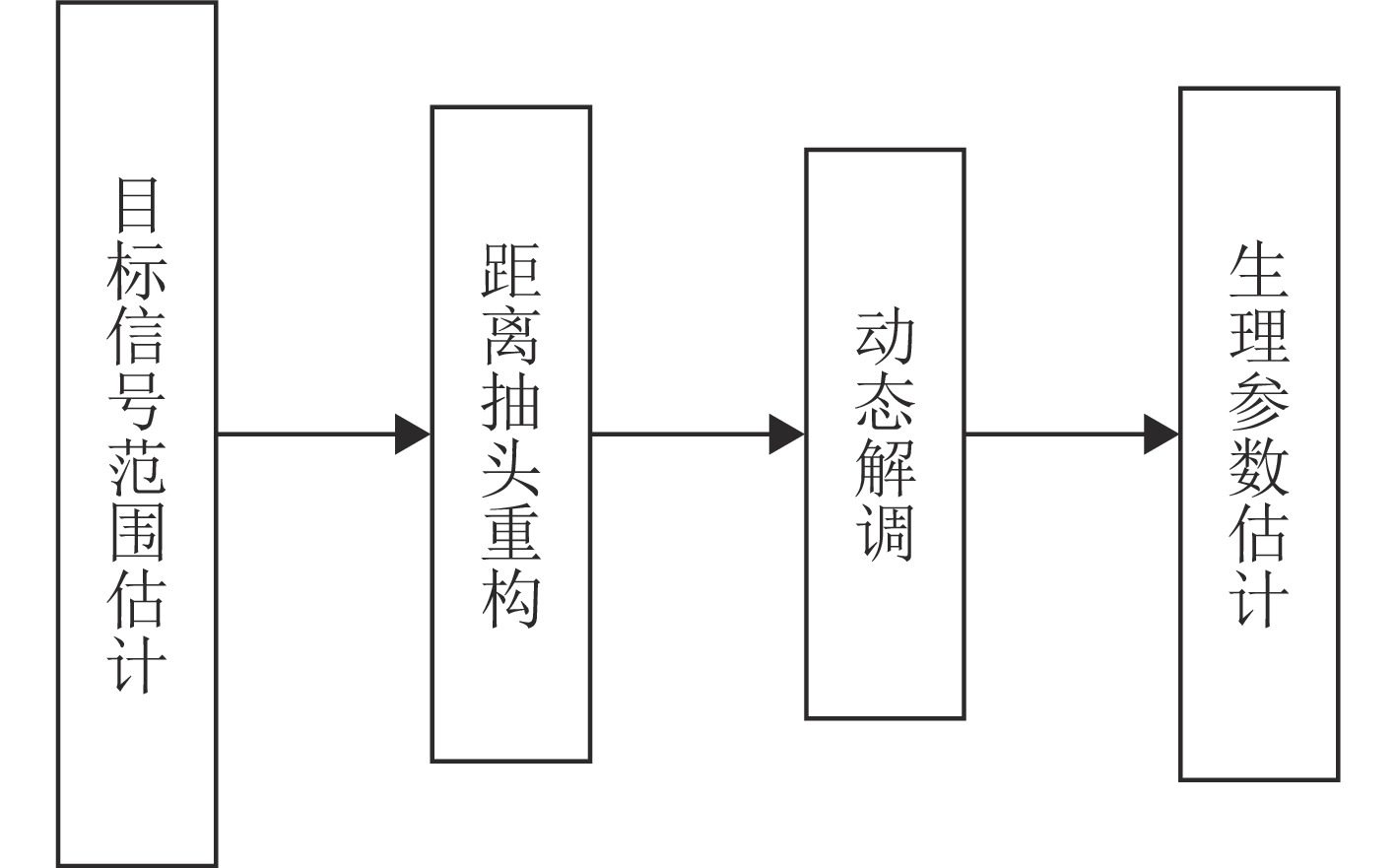
图 1 距离抽头重构与动态解调算法
Figure 1. Range tapper refactoring and dynamic demodulation algorithms
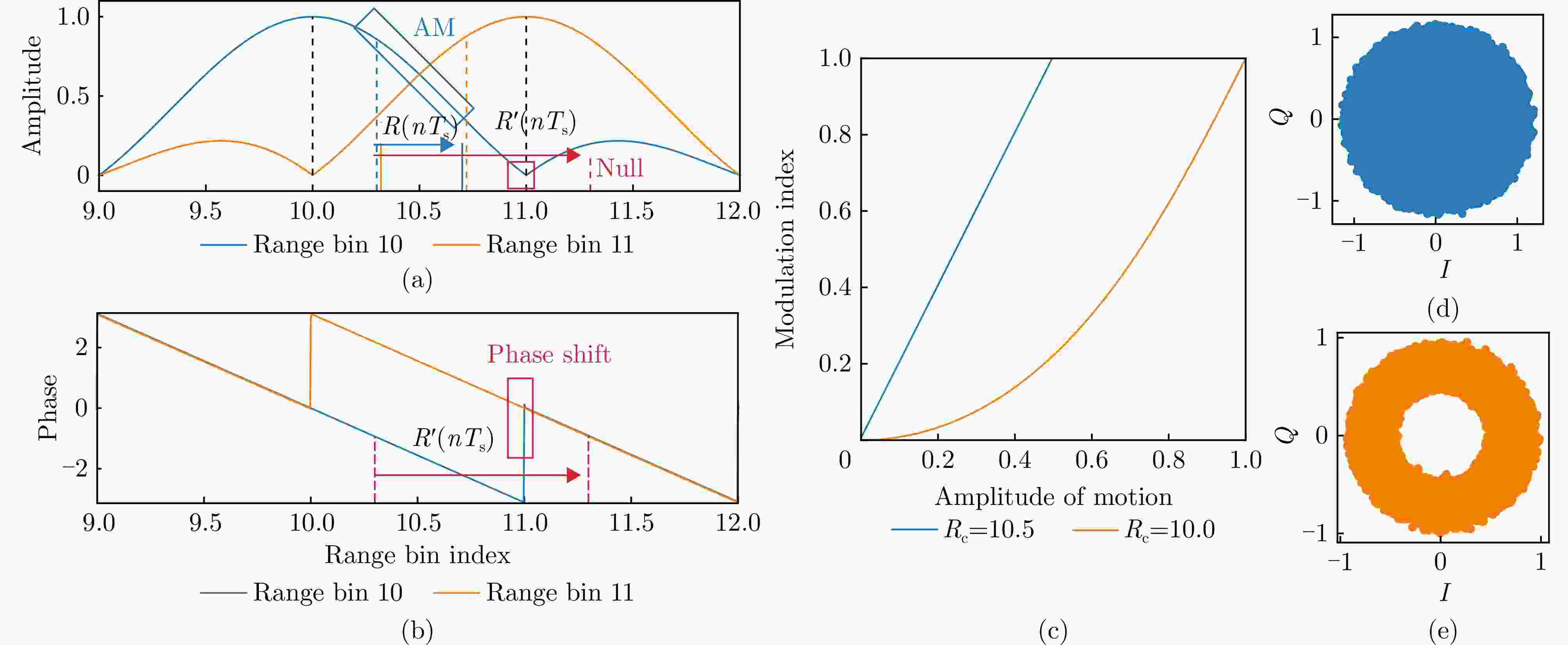
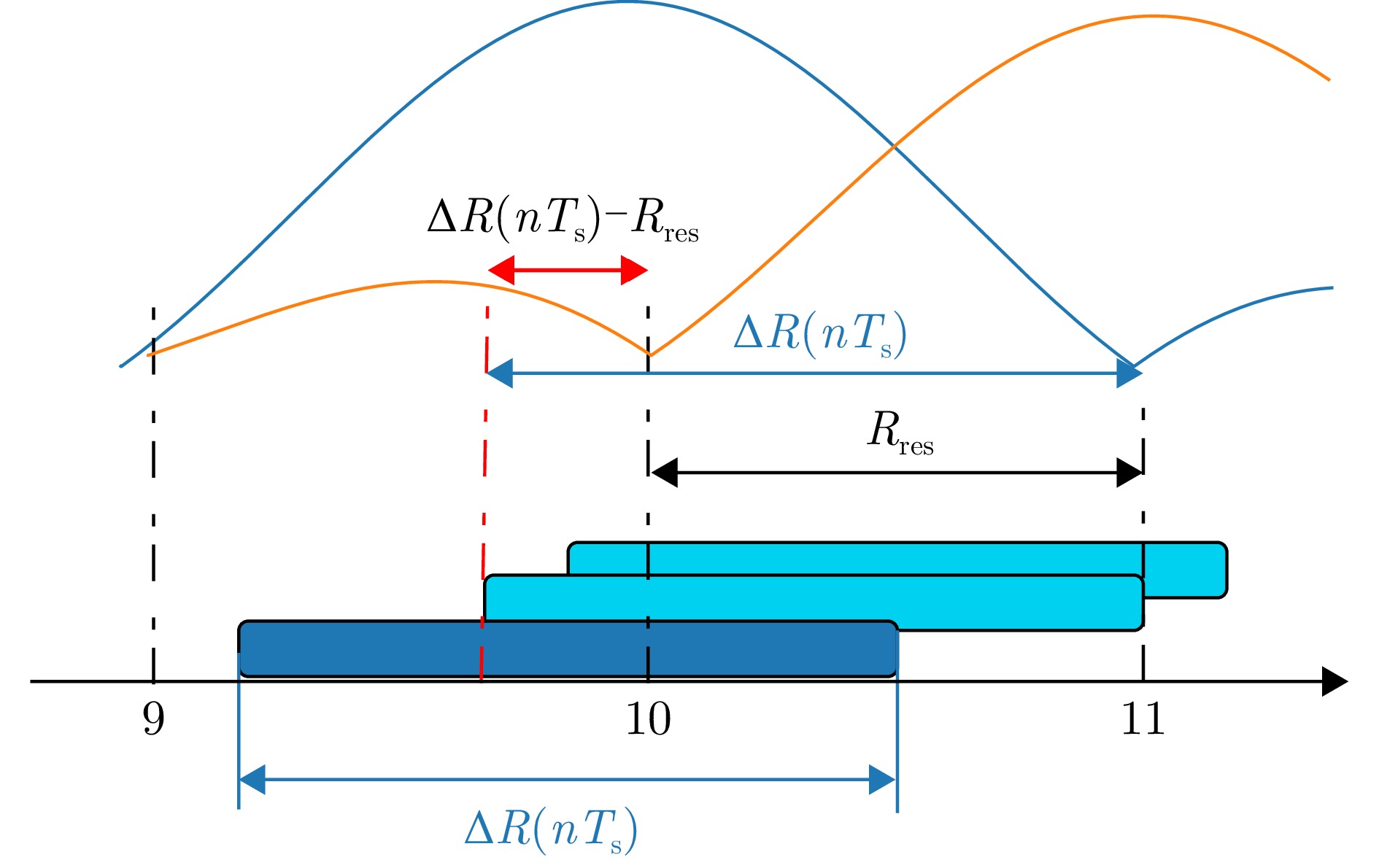
图 2 距离FFT引发的幅度信号幅度调制以及跨距离仓的问题 (a) 距离仓10和距离仓11对目标的幅度响应;(b) 距离仓10和距离仓11对目标的相位响应;(c) 当目标运动的中心点分别位于距离仓10.5和距离仓10.0时幅度调制系数与运动幅度的关系;(d) 当目标运动的中心点分别位于距离仓10.5且位移达到一个距离仓宽度时的星座图;(e) 当目标运动的中心点分别位于距离仓10.0且位移达到一个距离仓宽度时的星座图
Figure 2. Amplitude modulation of the signal caused by range FFT and the problem of spanning range bins (a) Amplitude response of range bin 10 and range bin 11; (b) Phase response of range bin 10 and range bin 11; (c) Relationship between the amplitude modulation coefficient and the motion amplitude when the center point of the target motion is located in the range bin 10.5 and the range bin 10.0 respectively; (d) Constellation diagram when the center point of the target motion is located in the range bin 10.5 and the displacement reaches the width of one range bin; (e) Constellation diagram when the center point of the target motion is located in the range bin 10.0 and the displacement reaches the width of one range bin

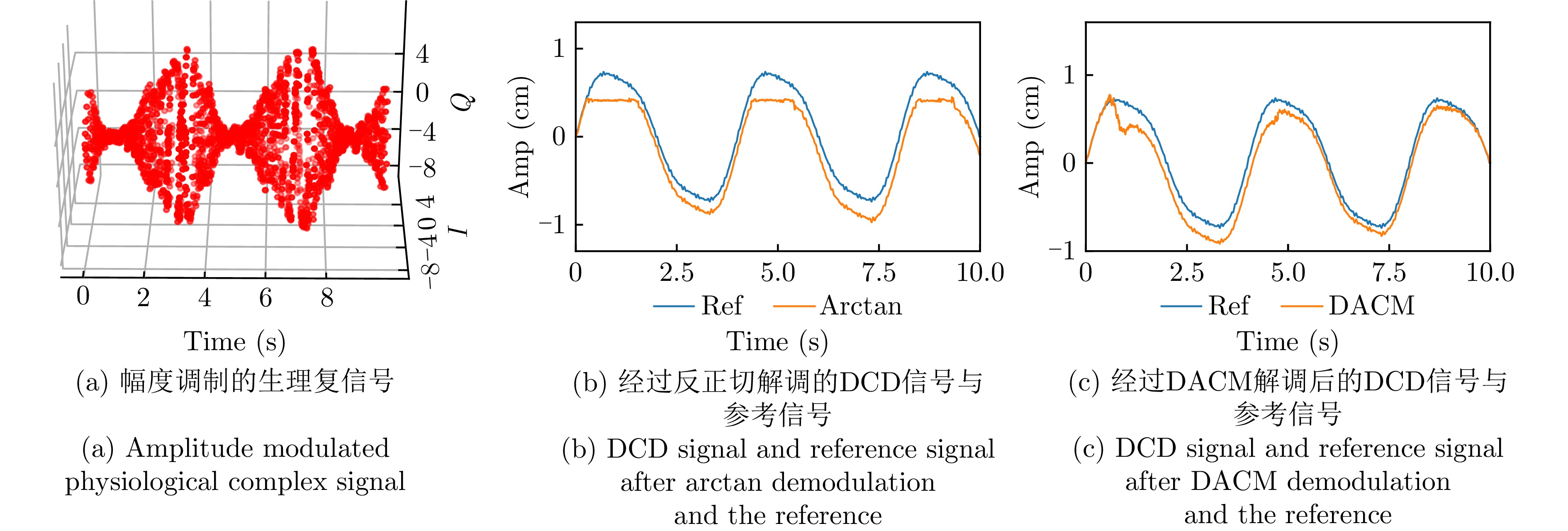
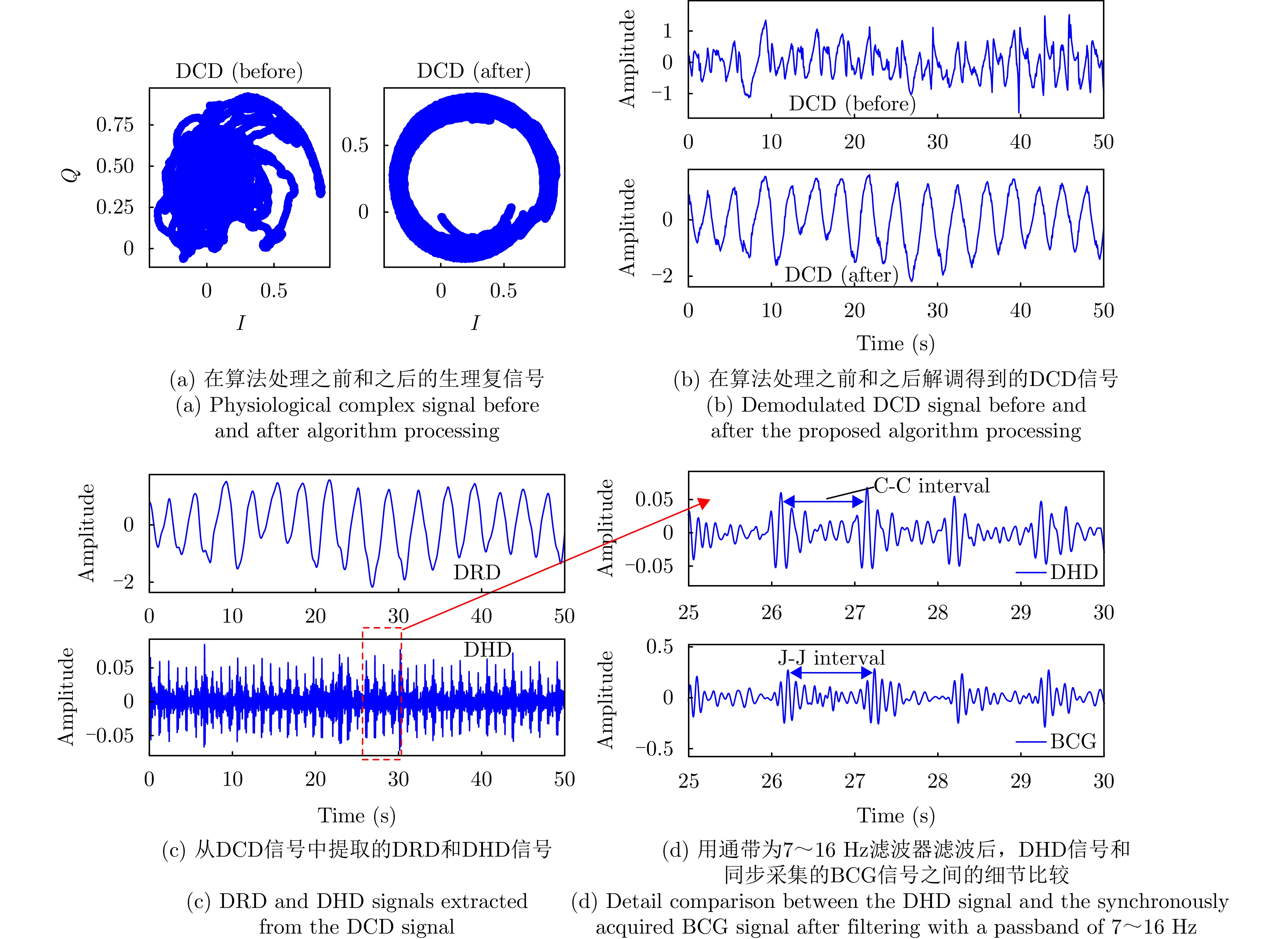
图 4 幅度调制信号经过不同解调算法提取的DCD
Figure 4. DCD extracted from amplitude modulated signals using different demodulation algorithms

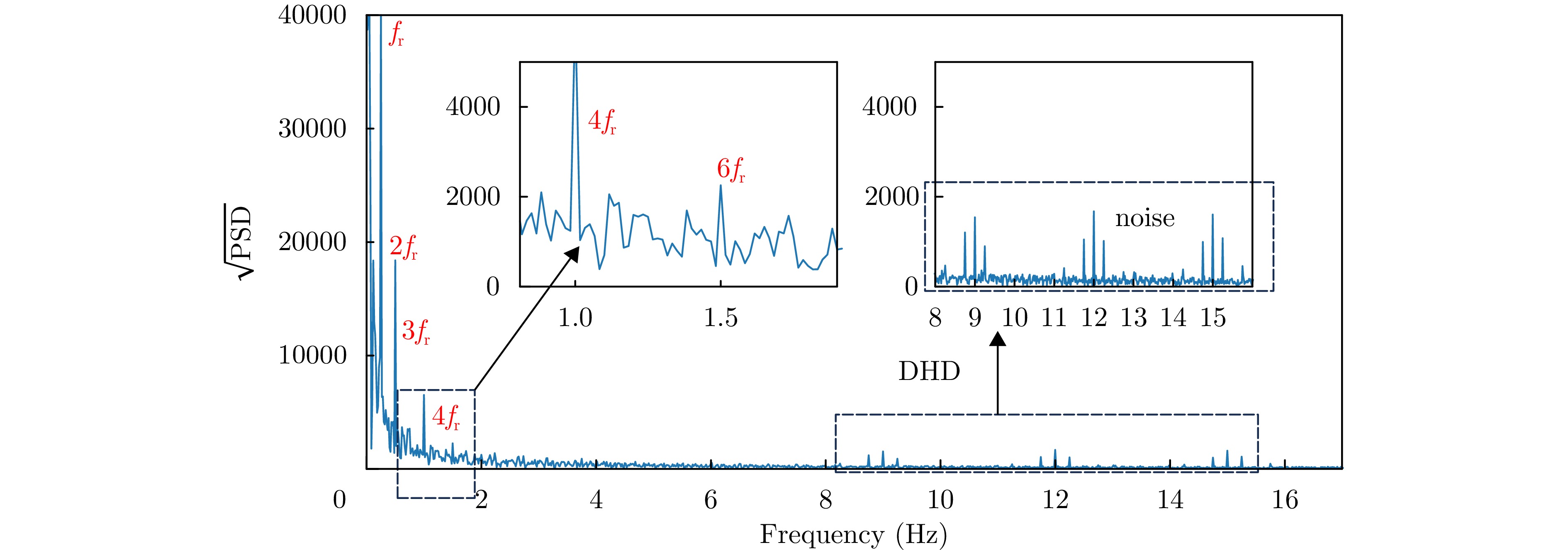
图 5 幅度调制生理复信号解调后的功率谱密度
Figure 5. Power spectral density of amplitude modulated physiological complex signal after arctan demodulation
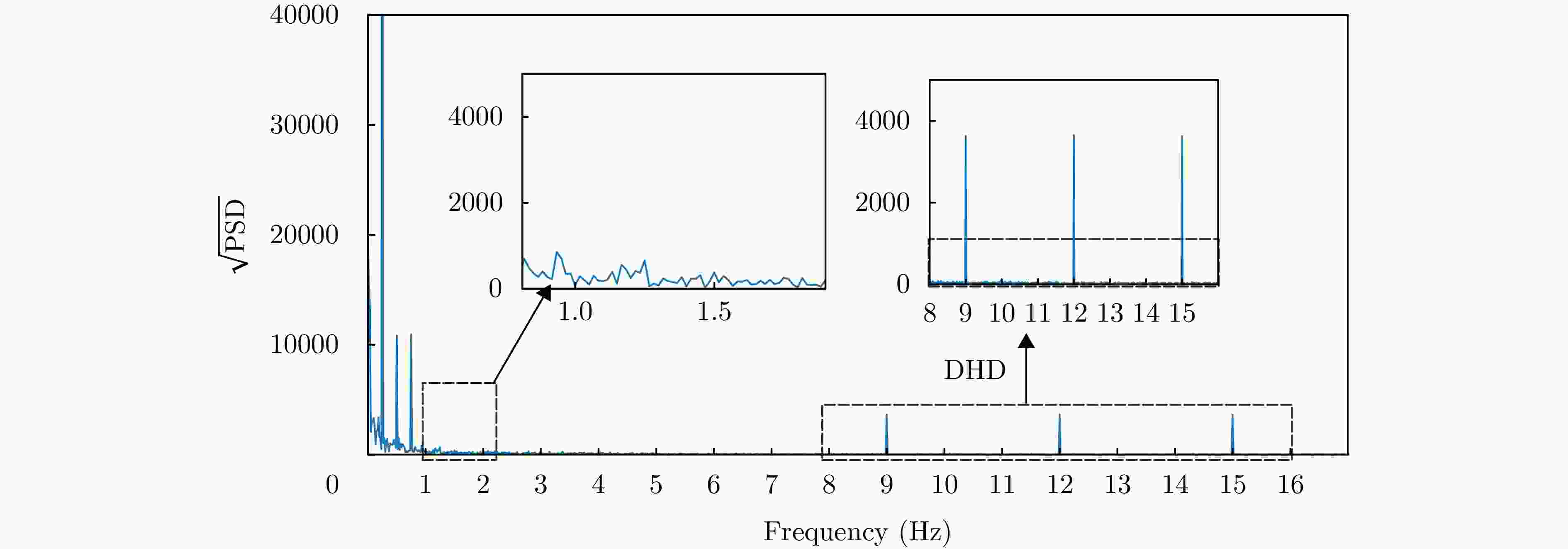
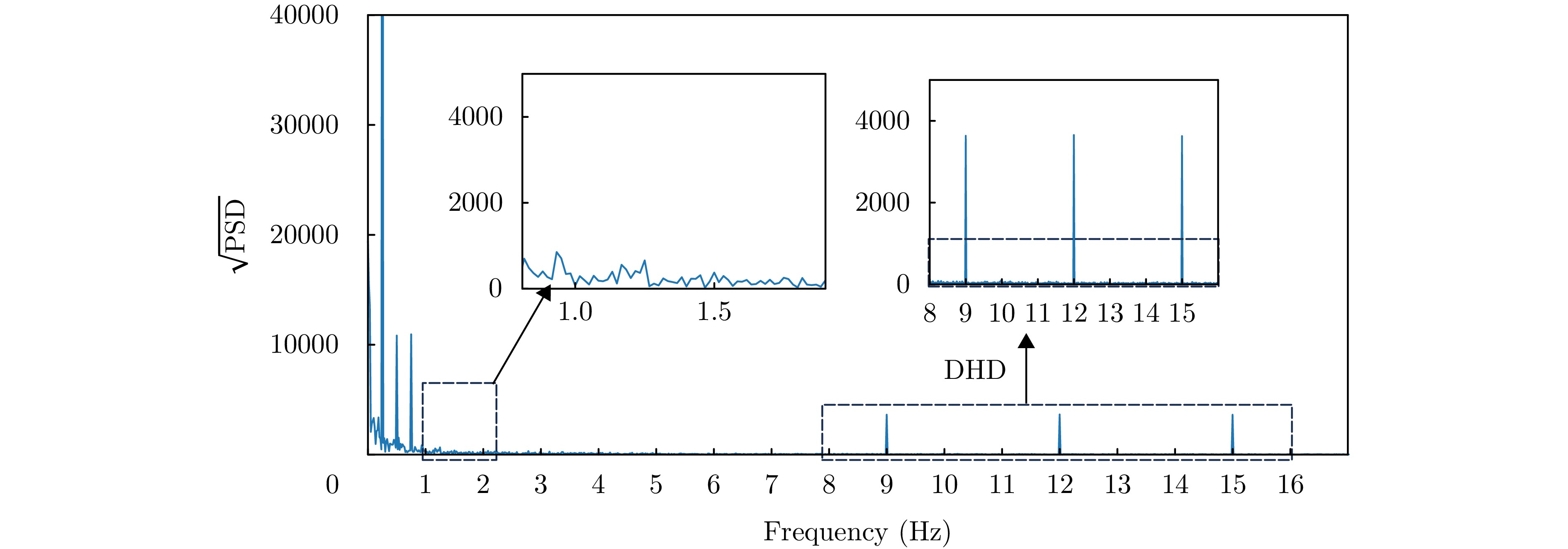
图 6 本文算法处理后DCD信号的功率谱密度
Figure 6. Power spectral density of DCD signal after processed by the proposed algorithm
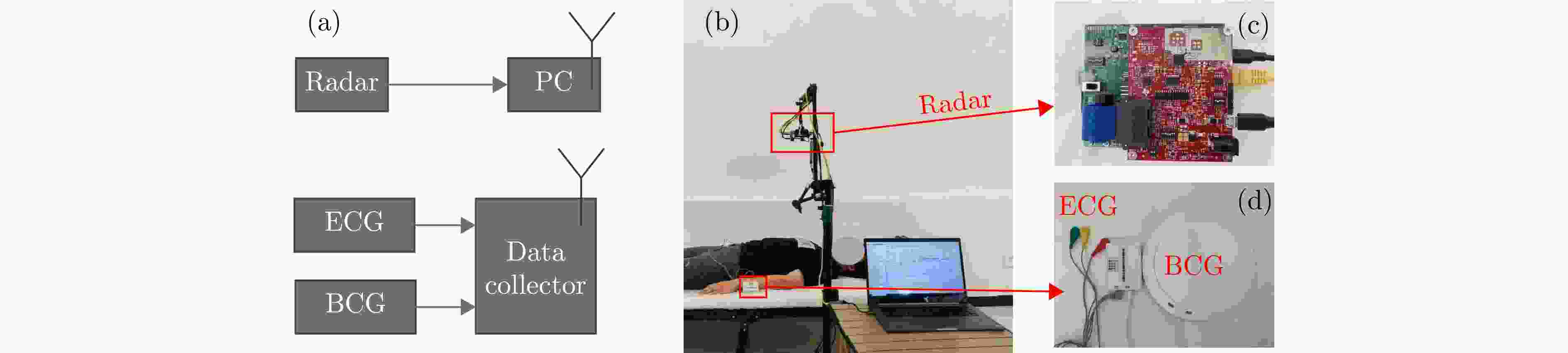
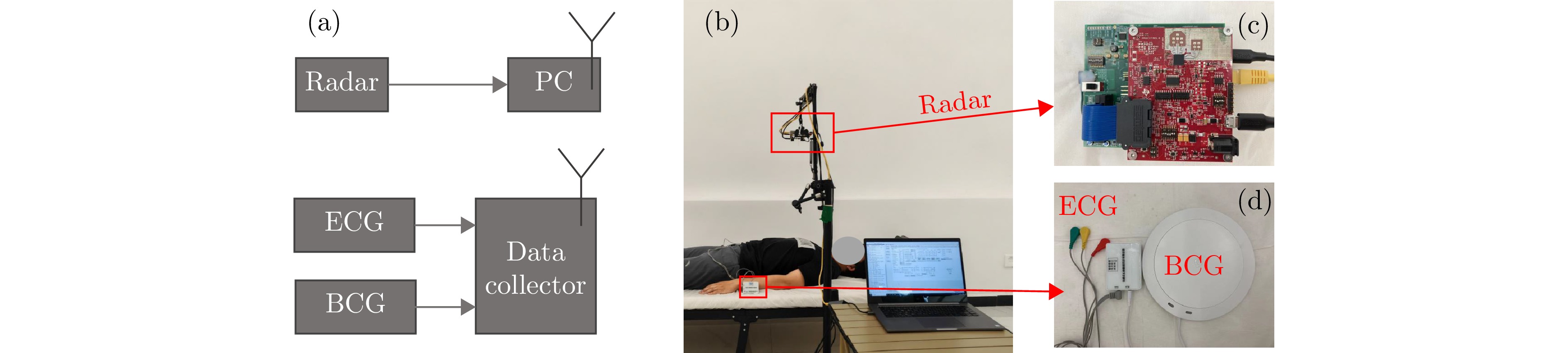
图 8 实验设置框图与实验设置 (a) 实验设置框图;(b) 实验设置照片;(c) 雷达传感器通过数据采集板连接到PC并通过无线网获取时间戳;(d) 数据采集器通过ADC同步采集ECG和BCG并通过无线网获取时间戳
Figure 8. Block diagram of the experimental setup and the experimental setup (a) Block diagram of the experimental setup; (b) Photo of the experimental setup; (c) The radar sensor is connected to the PC through the data acquisition board and obtains timestamps through the wireless network; (d) The data collector synchronously collects ECG and BCG through ADC and obtains timestamps through the wireless network
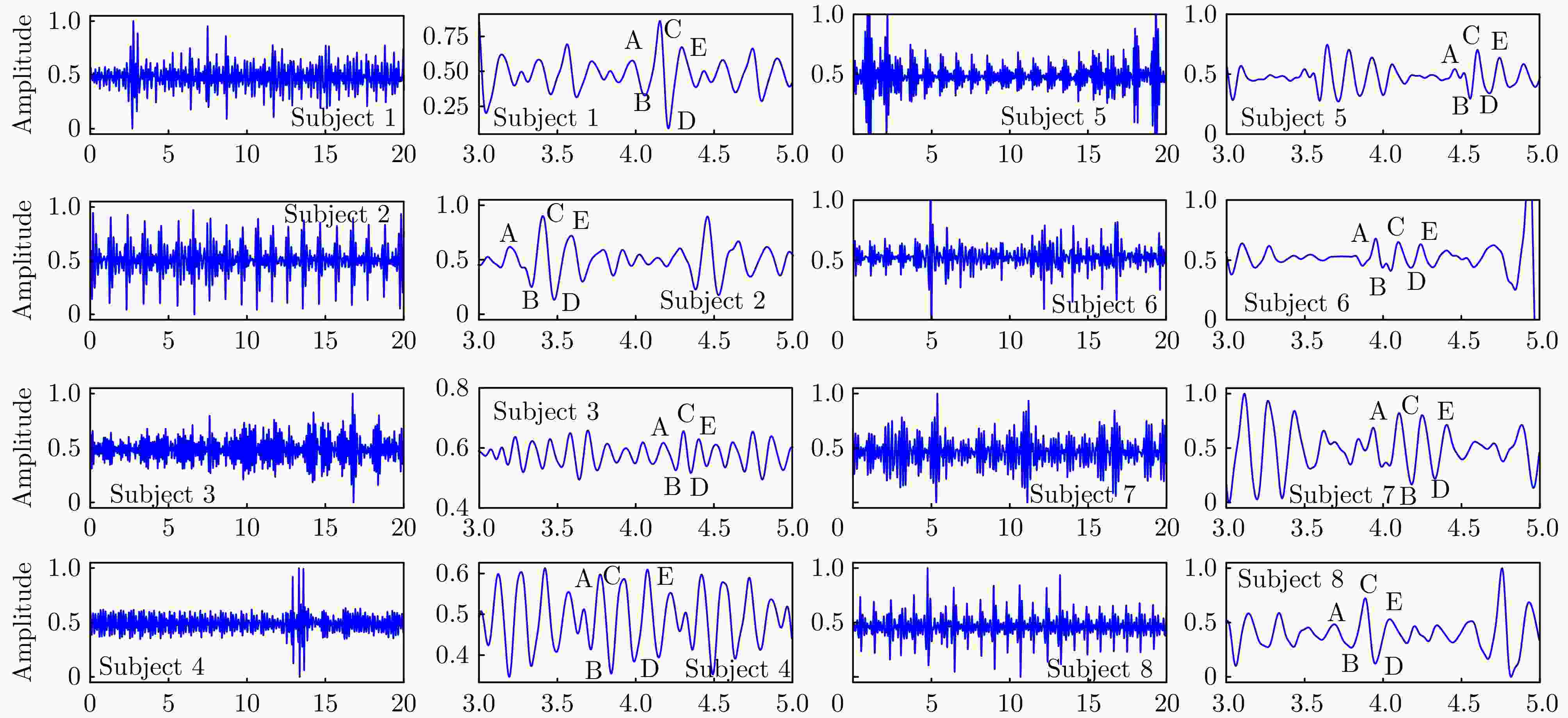
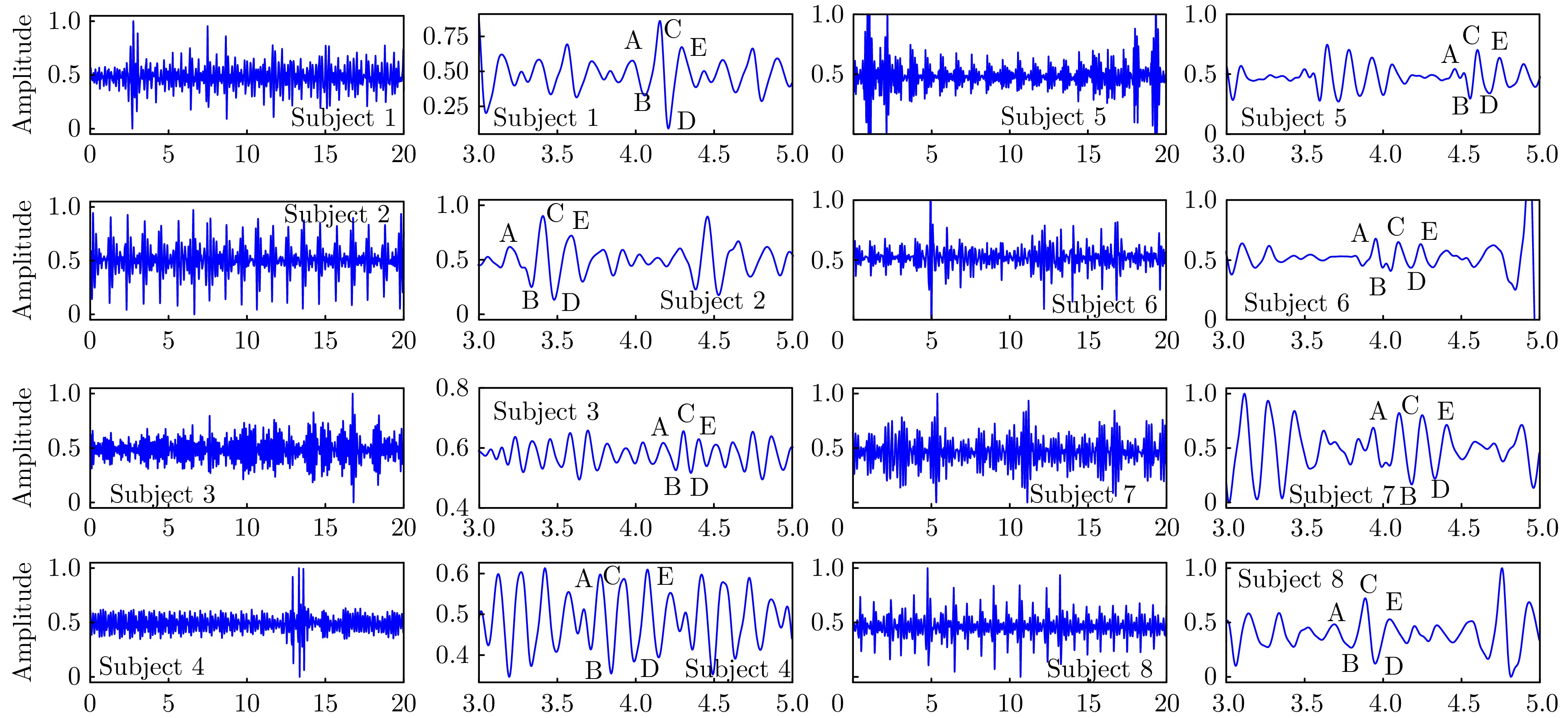
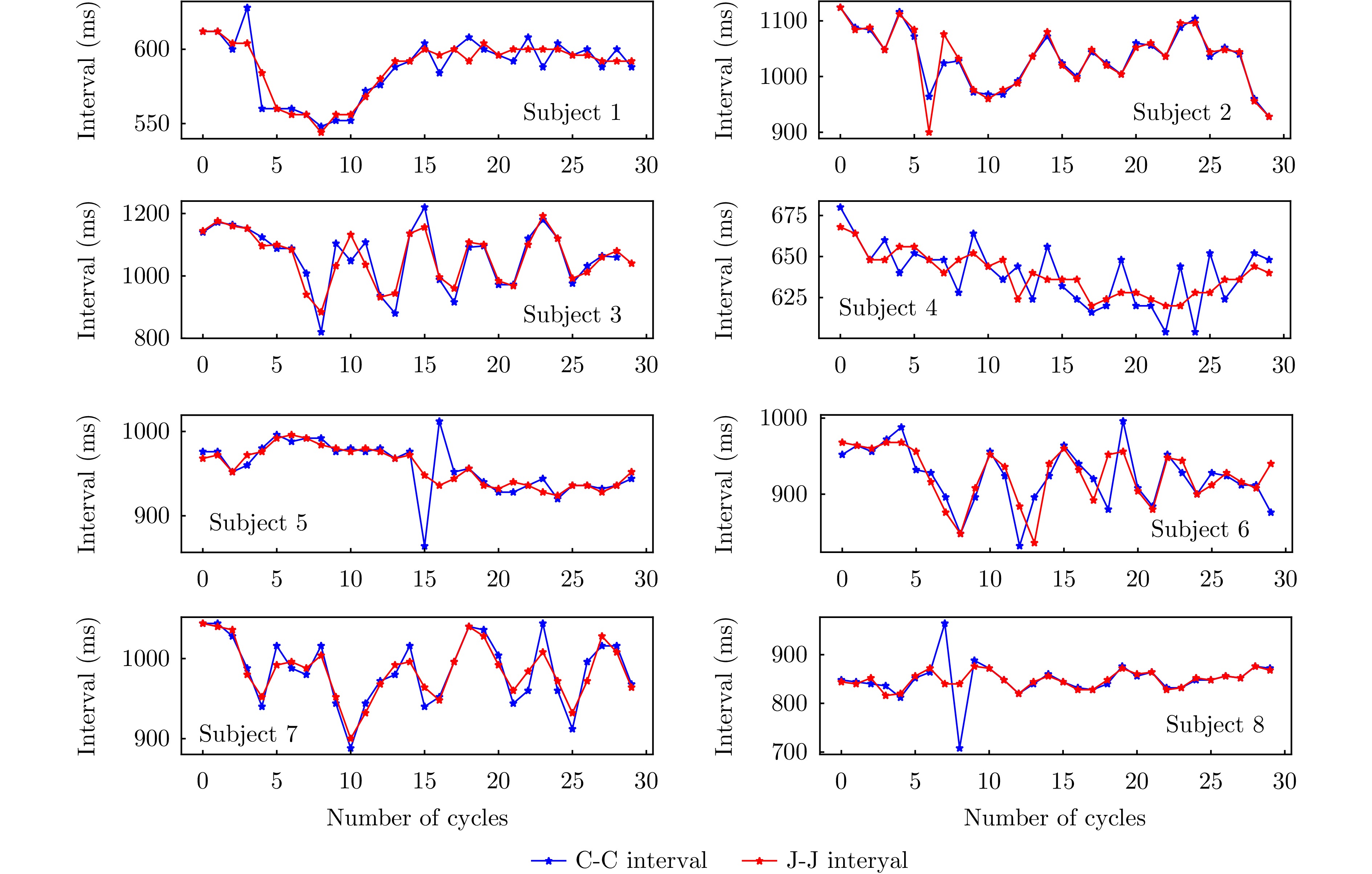
图 13 检测到的8名受试者的DHD信号(滤波器通带为8~20 Hz以及每段信号3~5 s的DHD信号细节)
Figure 13. Detected DHD signals for each eight subjects (details of the DHD signals between 3 and 5 s where the filter passband is 8~20 Hz)
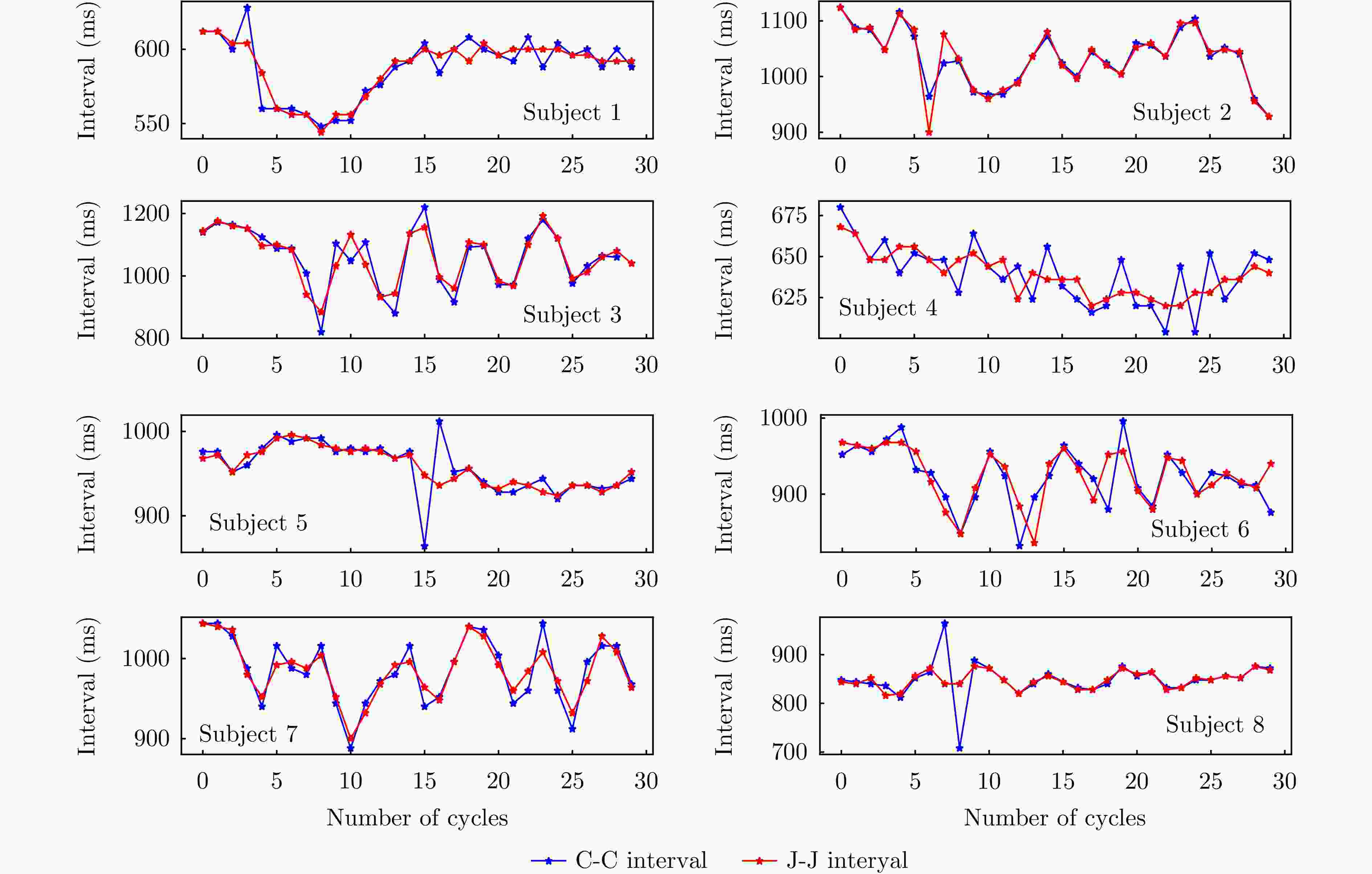
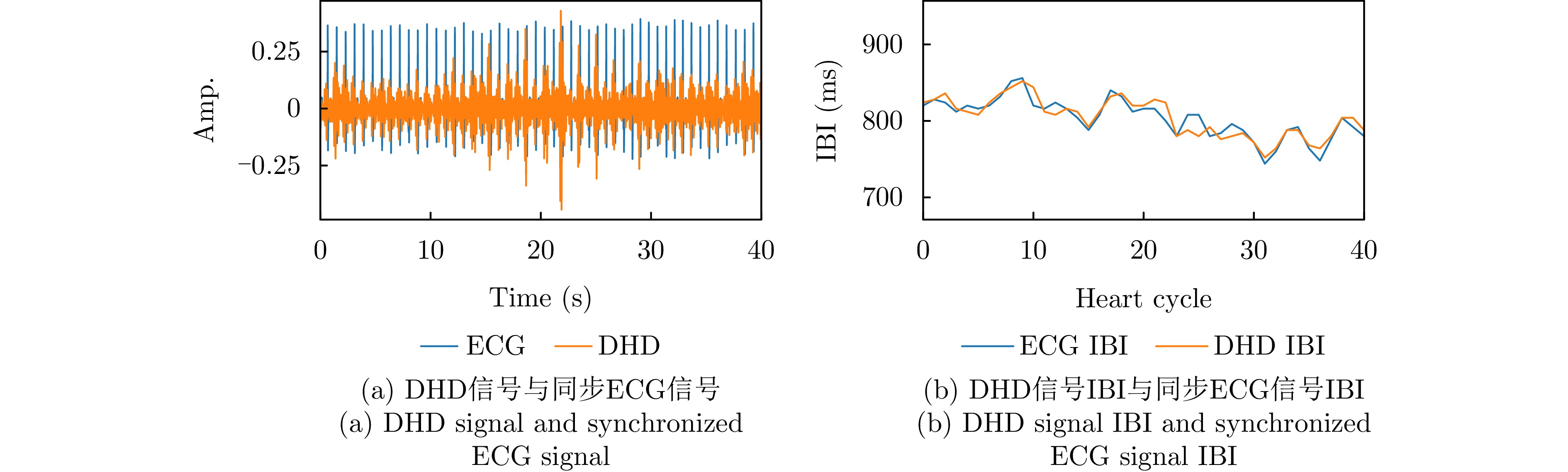
图 14 DHD信号中C-C间隔与BCG信号中J-J间隔的关系
Figure 14. Relationship between C-C interval in DHD signal and J-J interval in BCG signal
表 1 毫米波雷达IWR6843的主要参数
Table 1. Key parameters of millimeter-wave radar IWR6843
参数 数值 载波频率 60 GHz 带宽 3.8 GHz 帧周期 4 ms 啁啾采样点数 100 距离仓宽度 3.94 cm  下载: 导出CSV
下载: 导出CSV
表 2 毫米波雷达WRL6432的主要参数
Table 2. Key parameters of millimeter-wave radar IWR6432
参数 数值 载波频率 60 GHz 带宽 6.63 GHz 帧周期 4 ms 啁啾采样点数 512 距离仓宽度 2.26 cm
下载: 导出CSV
表 3 仿真主要参数
Table 3. Key parameters of simulation
参数 数值 载波频率 60 GHz 带宽 3.8 GHz 帧周期 10 ms 啁啾采样点数 128 距离仓宽度 3.94 cm
下载: 导出CSV
表 4 距离FFT与本文算法处理信号的SNR对比
Table 4. 4 SNR comparison of the signal processed by range FFT and the proposed algorithm
Pos Amp SNR before (dB) SNR after (dB) 0 1.00 24.69 42.05 0.25 1.00 23.50 35.60 0.50 1.00 24.29 36.87 0 0.50 22.91 43.44 0.25 0.50 27.73 42.16 0 0.25 26.54 45.66 0.50 0.50 29.84 43.04 0.25 0.25 32.28 44.69
下载: 导出CSV
表 5 DHD信号的C-C间隔相对于BCG信号的 J-J间隔的RMSE
Table 5. RMSE of the C-C interval of the DHD signal relative to the J-J interval of the BCG signal
人员 RMSE (ms) 平均偏差(%) Subject 1 8.32 0.96 Subject 2 15.90 0.77 Subject 3 34.85 2.36 Subject 4 22.15 2.07 Subject 5 21.92 1.07 Subject 6 28.28 2.07 Subject 7 12.97 1.01 Subject 8 19.12 1.22
下载: 导出CSV
-
[1] LIU Lin, YU Dongfang, LU Hongzhou, et al. Camera-based seismocardiogram for heart rate variability monitoring[J]. IEEE Journal of Biomedical and Health Informatics, 2024, 28(5): 2794–2805. doi: 10.1109/JBHI.2024.3370394. [2] YU Xinchi, LAURENTIUS T, BOLLHEIMER C, et al. Noncontact monitoring of heart rate and heart rate variability in geriatric patients using photoplethysmography imaging[J]. IEEE Journal of Biomedical and Health Informatics, 2021, 25(5): 1781–1792. doi: 10.1109/JBHI.2020.3018394. [3] XIAO Yanming, LIN J, BORIC-LUBECKE O, et al. A Ka-band low power Doppler radar system for remote detection of cardiopulmonary motion[C]. 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 2005: 7151–7154. doi: 10.1109/IEMBS.2005.1616156. [4] GU Changzhan, LI Ruijiang, ZHANG Hualiang, et al. Accurate respiration measurement using DC-coupled continuous-wave radar sensor for motion-adaptive cancer radiotherapy[J]. IEEE Transactions on Biomedical Engineering, 2012, 59(11): 3117–3123. doi: 10.1109/TBME.2012.2206591. [5] GU Changzhan, HE Yuchu, and ZHU Jiang. Noncontact vital sensing with a miniaturized 2.4 GHz circularly polarized Doppler radar[J]. IEEE Sensors Letters, 2019, 3(7): 3501204. doi: 10.1109/LSENS.2019.2924695. [6] ZHAO Heng, HONG Hong, MIAO Dongyu, et al. A noncontact breathing disorder recognition system using 2.4 GHz digital-IF Doppler radar[J]. IEEE Journal of Biomedical and Health Informatics, 2019, 23(1): 208–217. doi: 10.1109/JBHI.2018.2817258. [7] 方震, 简璞, 张浩, 等. 基于FMCW雷达的非接触式医疗健康监测技术综述[J]. 雷达学报, 2022, 11(3): 499–516. doi: 10.12000/JR22019.FANG Zhen, JIAN Pu, ZHANG Hao, et al. Review of noncontact medical and health monitoring technologies based on FMCW radar[J]. Journal of Radars, 2022, 11(3): 499–516. doi: 10.12000/JR22019. [8] 张群, 胡健, 罗迎, 等. 微动目标雷达特征提取、成像与识别研究进展[J]. 雷达学报, 2018, 7(5): 531–547. doi: 10.12000/JR18049.ZHANG Qun, HU Jian, LUO Ying, et al. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions[J]. Journal of Radars, 2018, 7(5): 531–547. doi: 10.12000/JR18049. [9] AHMAD A, ROH J C, WANG Dan, et al. Vital signs monitoring of multiple people using a FMCW millimeter-wave sensor[C]. 2018 IEEE Radar Conference, Oklahoma City, USA, 2018: 1450–1455. doi: 10.1109/RADAR.2018.8378778. [10] SHIN M, JUNG Y, KIM J, et al. FMCW Radar-based vital signal monitoring technique using adaptive range-bin selection[C]. 2023 IEEE Radar Conference, San Antonio, USA, 2023: 1–6. doi: 10.1109/RadarConf2351548.2023.10149752. [11] RONG Yu and BLISS D W. Remote sensing for vital information based on spectral-domain harmonic signatures[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(6): 3454–3465. doi: 10.1109/TAES.2019.2917489. [12] PARK J H and YANG J R. Multiphase continuous-wave Doppler radar with multiarc circle fitting algorithm for small periodic displacement measurement[J]. IEEE Transactions on Microwave Theory and Techniques, 2021, 69(11): 5135–5144. doi: 10.1109/TMTT.2020.3041264. [13] WANG Fukang, ZHONG Jixun, and SHIH J Y. IQ signal demodulation for noncontact vital sign monitoring using a CW Doppler radar: A review[J]. IEEE Journal of Electromagnetics, RF and Microwaves in Medicine and Biology, 2022, 6(4): 449–460. doi: 10.1109/JERM.2022.3214753. [14] ZHANG Hao, JIAN Pu, YAO Yicheng, et al. Radar-Beat: Contactless beat-by-beat heart rate monitoring for life scenes[J]. Biomedical Signal Processing and Control, 2023, 86: 105360. doi: 10.1016/j.bspc.2023.105360. [15] DAI T K V, OLEKSAK K, KVELASHVILI T, et al. Enhancement of remote vital sign monitoring detection accuracy using multiple-input multiple-output 77 GHz FMCW radar[J]. IEEE Journal of Electromagnetics, RF and Microwaves in Medicine and Biology, 2022, 6(1): 111–122. doi: 10.1109/JERM.2021.3082807. [16] WANG Guochao, GU Changzhan, INOUE T, et al. A hybrid FMCW-interferometry radar for indoor precise positioning and versatile life activity monitoring[J]. IEEE Transactions on Microwave Theory and Techniques, 2014, 62(11): 2812–2822. doi: 10.1109/TMTT.2014.2358572. [17] XU Zhaoyi, SHI Cong, ZHANG Tianfang, et al. Simultaneous monitoring of multiple people’s vital sign leveraging a single phased-MIMO radar[J]. IEEE Journal of Electromagnetics, RF and Microwaves in Medicine and Biology, 2022, 6(3): 311–320. doi: 10.1109/JERM.2022.3143431. [18] MERCURI M, LORATO I R, LIU Yaohong, et al. Vital-sign monitoring and spatial tracking of multiple people using a contactless radar-based sensor[J]. Nature Electronics, 2019, 2(6): 252–262. doi: 10.1038/s41928-019-0258-6. [19] SACCO G, PIUZZI E, PITTELLA E, et al. An FMCW radar for localization and vital signs measurement for different chest orientations[J]. Sensors, 2020, 20(12): 3489. doi: 10.3390/s20123489. [20] SHANG Xiaolei, LIU Jian, and LI Jian. Multiple object localization and vital sign monitoring using IR-UWB MIMO radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(6): 4437–4450. doi: 10.1109/TAES.2020.2990817. [21] ADIB F, MAO Hongzi, KABELAC Z, et al. Smart homes that monitor breathing and heart rate[C]. The 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul Republic of Korea, 2015: 837–846. doi: 10.1145/2702123.270220. [22] ZHENG Tianyue, CHEN Zhe, CAI Chao, et al. V2iFi: In-vehicle vital sign monitoring via compact RF sensing[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2020, 4(2): 70. doi: 10.1145/3397321. [23] KHAN U M, RIGAZIO L, and SHAHZAD M. Contactless monitoring of PPG using radar[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2022, 6(3): 123. doi: 10.1145/3550330. [24] HA U, ASSANA S, and ADIB F. Contactless seismocardiography via deep learning radars[C]. The 26th Annual International Conference on Mobile Computing and Networking, London, United Kingdom, 2020: 62. doi: 10.1145/3372224.3419982. [25] CHEN Jinbo, ZHANG Dongheng, WU Zhi, et al. Contactless electrocardiogram monitoring with millimeter wave radar[J]. IEEE Transactions on Mobile Computing, 2024, 23(1): 270–285. doi: 10.1109/TMC.2022.3214721. [26] ALIZADEH M, SHAKER G, DE ALMEIDA J C M, et al. Remote monitoring of human vital signs using mm-wave FMCW radar[J]. IEEE Access, 2019, 7: 54958–54968. doi: 10.1109/ACCESS.2019.2912956. [27] WANG Yong, WANG Wen, ZHOU Mu, et al. Remote monitoring of human vital signs based on 77-GHz mm-wave FMCW radar[J]. Sensors, 2020, 20(10): 2999. doi: 10.3390/s20102999. [28] PARK B K, BORIC-LUBECKE O, and LUBECKE V M. Arctangent demodulation with DC offset compensation in quadrature Doppler radar receiver systems[J]. IEEE Transactions on Microwave Theory and Techniques, 2007, 55(5): 1073–1079. doi: 10.1109/TMTT.2007.895653. [29] WANG Jingyu, WANG Xiang, CHEN Lei, et al. Noncontact distance and amplitude-independent vibration measurement based on an extended DACM algorithm[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(1): 145–153. doi: 10.1109/TIM.2013.2277530. [30] WANG Haoyu, CHEN Jinbo, ZHANG Dongheng, et al. Contactless radar heart rate variability monitoring via deep spatio-temporal modeling[C]. 2024 IEEE International Conference on Acoustics, Speech and Signal Processing, Seoul, Korea, Republic of, 2024: 111–115. doi: 10.1109/ICASSP48485.2024.10447570. [31] ZHANG Binbin, ZHANG Dongheng, SONG Ruiyuan, et al. RF-search: Searching unconscious victim in smoke scenes with RF-enabled drone[C]. The 29th Annual International Conference on Mobile Computing and Networking, Madrid, Spain, 2023: 91. doi: 10.1145/3570361.3613305. [32] IWR1642数据表、产品信息和支持|德州仪器TI.com.cn[EB/OL]. https://www.ti.com.cn/product/cn/IWR1642. [33] IWRL6432数据表、产品信息和支持|德州仪器TI.com.cn[EB/OL]. https://www.ti.com.cn/product/cn/IWRL6432. [34] TAMIYA H, MITANI A, ISAGO H, et al. Measurement of chest wall motion using a motion capture system with the one-pitch phase analysis method[J]. Scientific Reports, 2021, 11(1): 21497. doi: 10.1038/s41598-021-01033-8. [35] ZHU Chengkai, BALLE M, ZHANG Bin, et al. Doppler cardiogram detected by a V-band Doppler radar sensor[J]. IEEE Transactions on Microwave Theory and Techniques, 2022, 70(1): 521–531. doi: 10.1109/TMTT.2021.3128591. [36] INAN O T, MIGEOTTE P F, PARK K S, et al. Ballistocardiography and seismocardiography: A review of recent advances[J]. IEEE Journal of Biomedical and Health Informatics, 2015, 19(4): 1414–1427. doi: 10.1109/JBHI.2014.2361732. [37] DCA1000EVM evaluation board|TI.com[EB/OL]. https://www.ti.com/tool/DCA1000EVM. [38] PAN Jiapu and TOMPKINS W J. A real-time QRS detection algorithm[J]. IEEE Transactions on Biomedical Engineering, 1985, BME-32(3): 230–236. doi: 10.1109/TBME.1985.325532. -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

