
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Novel Forward-looking Three-dimensional Imaging Based on Vortex Electromagnetic Wave Radar
-
摘要: 涡旋电磁波具有独特的波前相位调制特性,其作为一种新的雷达发射端分集模式,可实现目标雷达截面积 (RCS)分集、提升信号与信息处理维度和性能,其探测与成像性能在多种雷达体制中得到了验证。该文针对前视雷达成像的应用背景,基于均匀圆阵发射与圆阵中心单天线接收的收发体制,在建立了电磁涡旋前视雷达信号模型与成像模型的基础上,提出了一种分时多模态扫描的成像方法,利用多模态涡旋电磁波在不同俯仰角的幅度差异性和在不同方位角的相位差异性,以及雷达与目标相对运动产生的多普勒效应,提出了改进的后向投影-距离多普勒算法,实现了目标三维成像。由于涡旋电磁波的能量发散特点,随着俯仰角增大,高模态方向图增益急剧下降,该文所提方法通过对多个模态在空域能量分布的有效利用,在较大视场角下具有较高的稳定性。基于点目标成像结果,验证了在多模态涡旋波覆盖的较大视场范围内,目标成像结果的归一化等效增益在低俯仰角与高俯仰角处基本相当。所提方法通过对飞机目标的实验验证,根据成像结果可较为准确地重构目标的三维结构。Abstract: Vortex Electromagnetic Waves (VEMWs) have unique wavefront phase modulation characteristics. As a new degree of freedom in the diversity of radar transmitters, the VEMW Radar (VEMWR) provides Radar Cross-Section (RCS) diversity and improves signal and information processing dimensions and performances. The detection and imaging performances of VEMWR have been verified in various radar systems. This article focuses on the applying background of forward-looking radar imaging and proposes a time-division multiplemode scanning imaging method based on a Uniform Circular Array (UCA) system with multiple transmitters and a single receiver at the UCA center. First, we establish the forward-looking VEMWR imaging mode and corresponding signal mode. Next, an improved three-Dimensional (3D) back-projection and range-Doppler algorithm is proposed, which utilizes the magnitude difference at various elevation angles of multimode VEMW, phase difference at different azimuth angles, and Doppler effect resulting from the relative motion of the radar and target to achieve 3D imaging of the target. As the elevation angle increases, the beam pattern gain of the high-mode VEMW decreases sharply due to the energy divergence of the VEMW. The proposed method can maintain stability at low or high elevation angles using the energy distribution of multiple modes in the spatial domain. Imaging results of point targets revealed that the normalized gain of target-imaging results is equivalent either at low or high elevation angles within the multimode VEMW field of view. The proposed method is validated through experiments with an aircraft target. Based on the imaging results, it is verified that the proposed method can accurately reconstruct the 3D structure of complex targets.
-
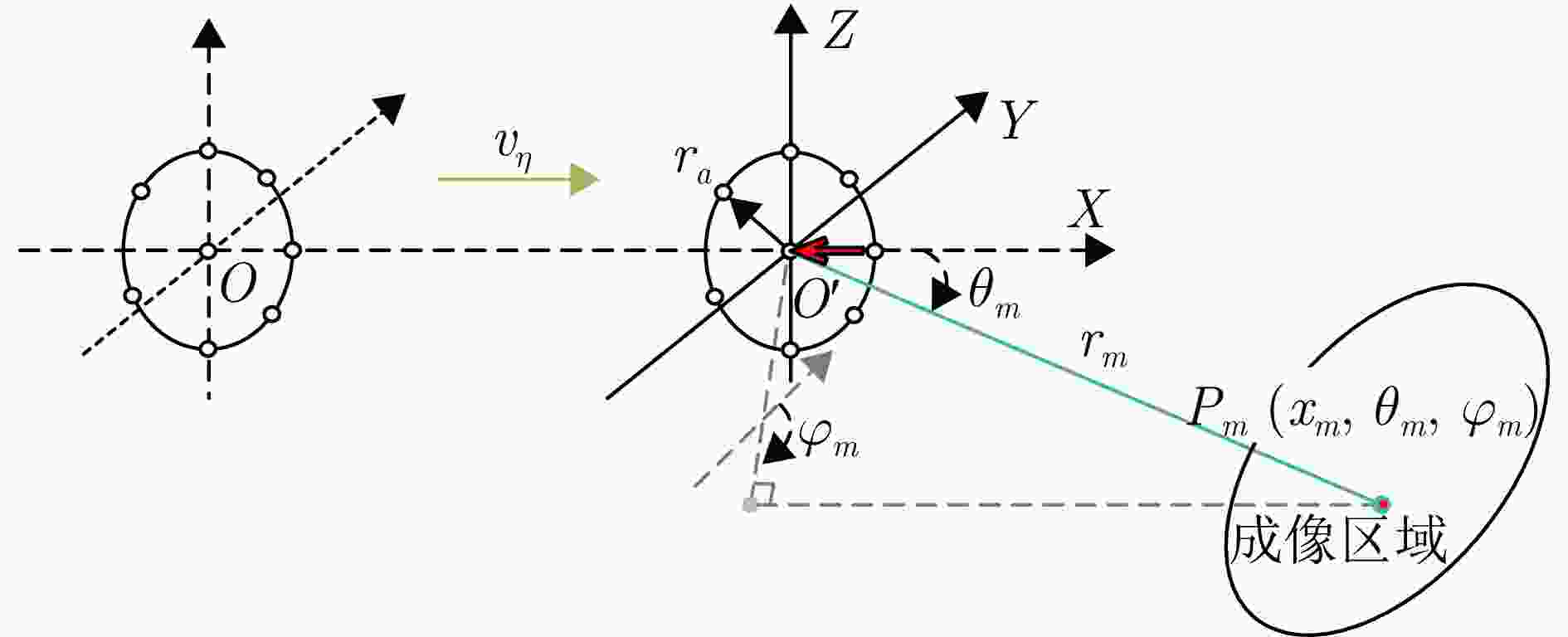
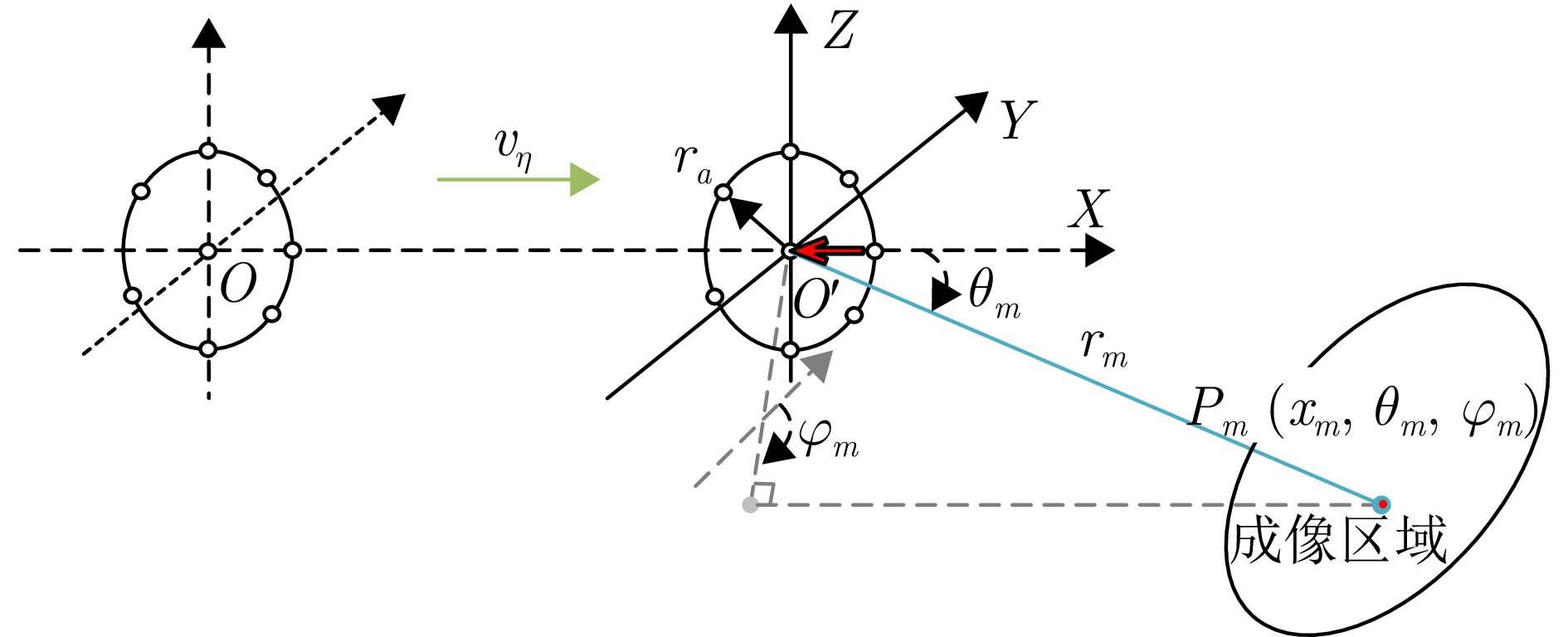
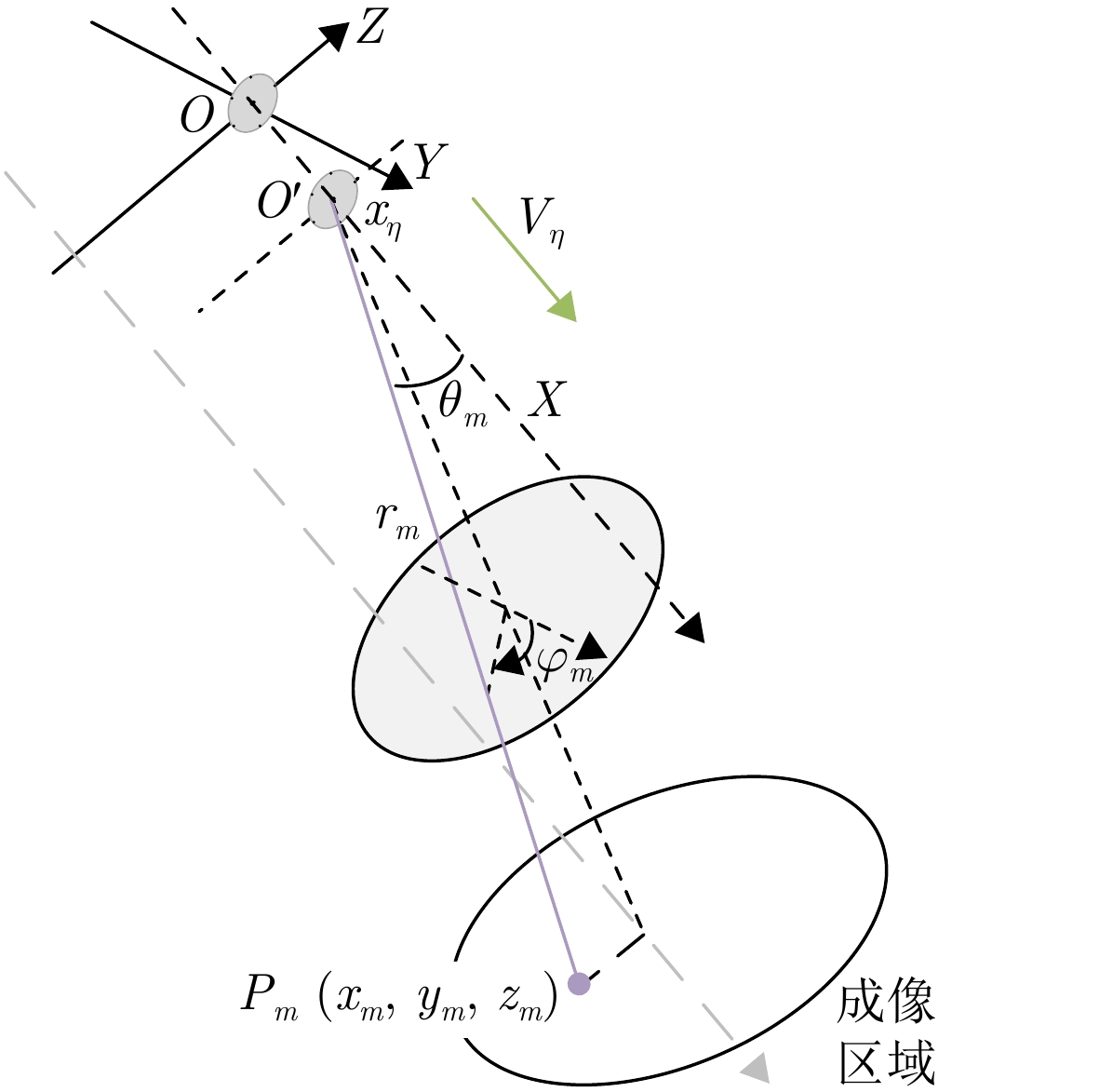
图 2 涡旋雷达前视成像坐标系
Figure 2. The coordinate system of vortex radar forward-looking imaging

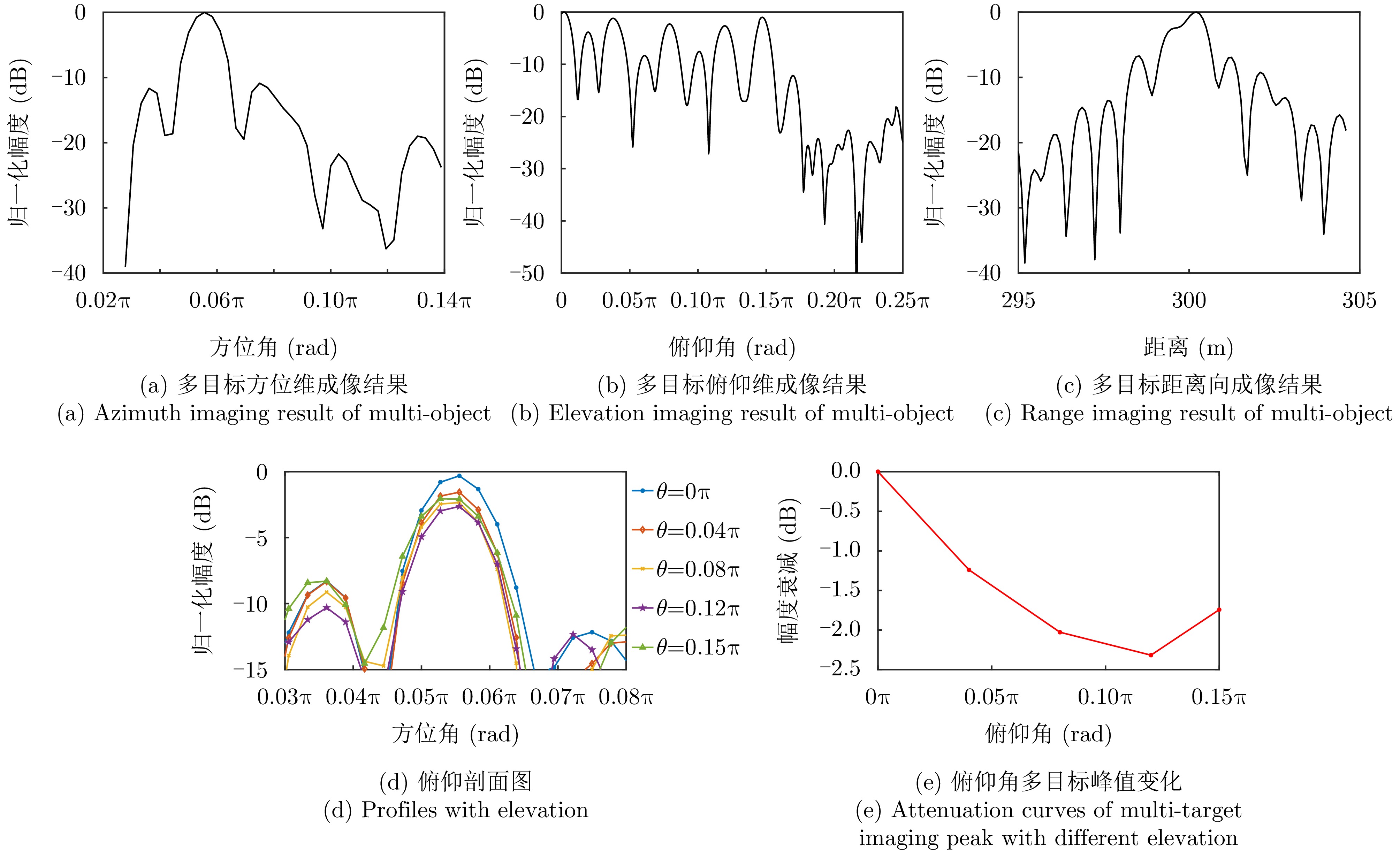
图 9 归一化信号处理增益变化图(以俯仰角θ=0为参考点进行归一化)
Figure 9. Signal processing gain curves with different elevation (based on zero angle, normalized signal processing gain)
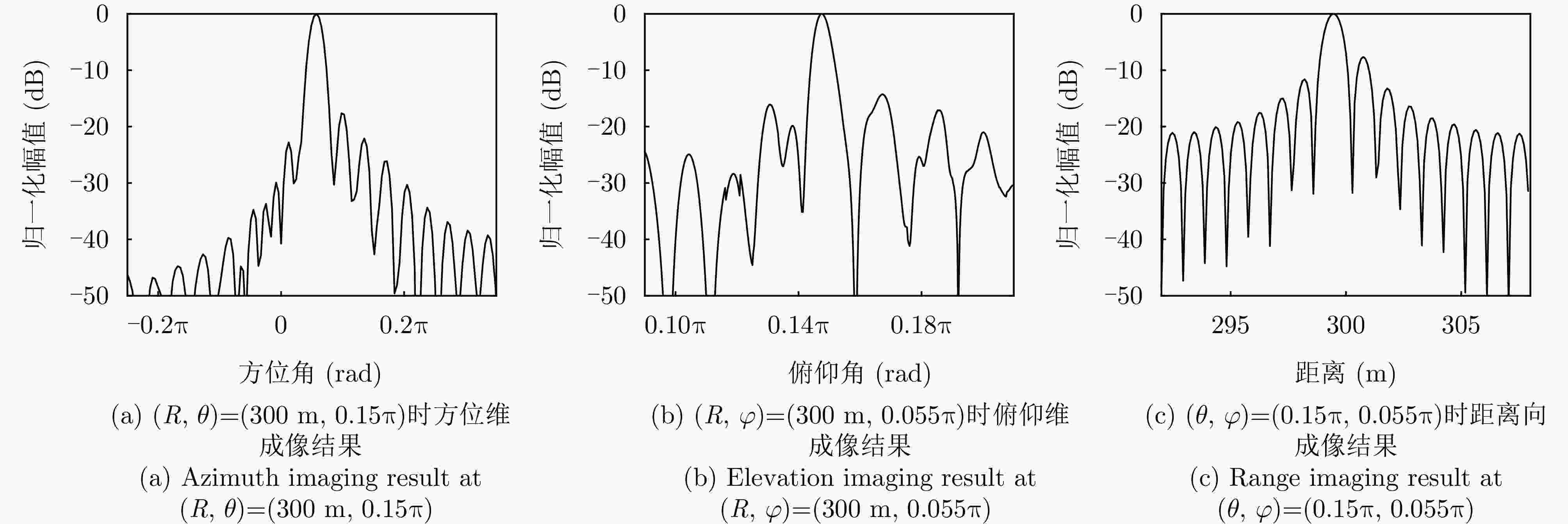
图 13 目标2不同维度的成像结果($ \theta =0.15\mathrm{\pi } $)
Figure 13. Point target 2 imaging results in different dimensions ($ \theta =0.15\mathrm{\pi } $)

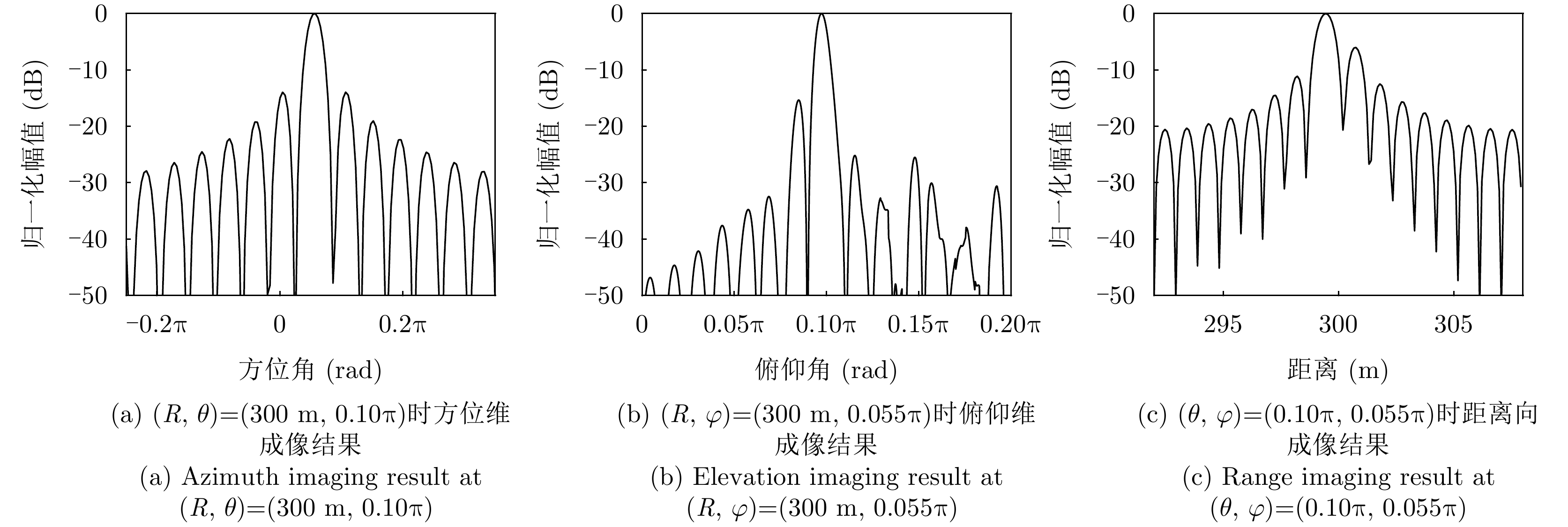
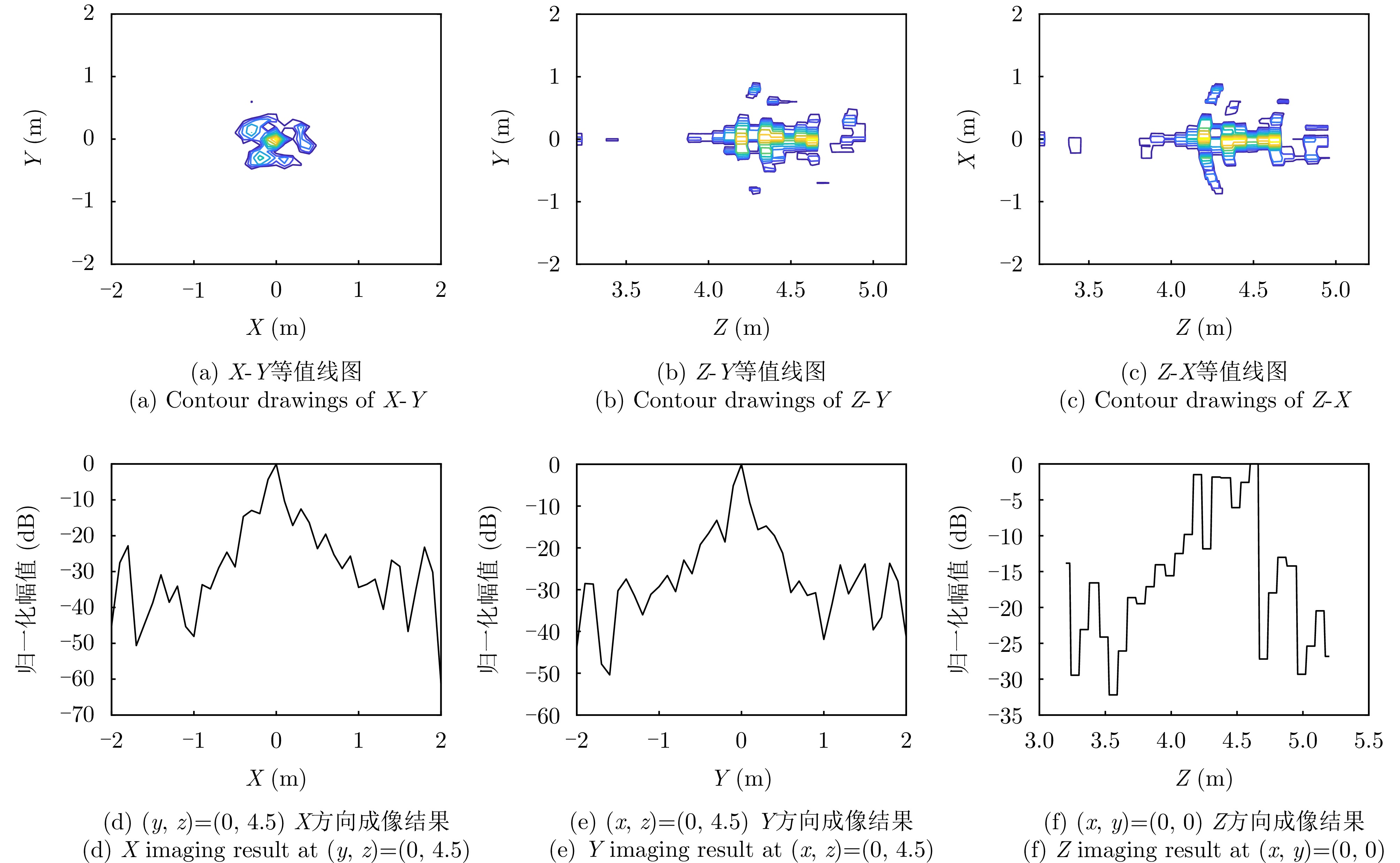
图 12 目标1不同维度的成像结果($ \theta =0.1\mathrm{\pi } $)
Figure 12. Point target 1 imaging results in different dimensions ($ \theta =0.1\mathrm{\pi } $)
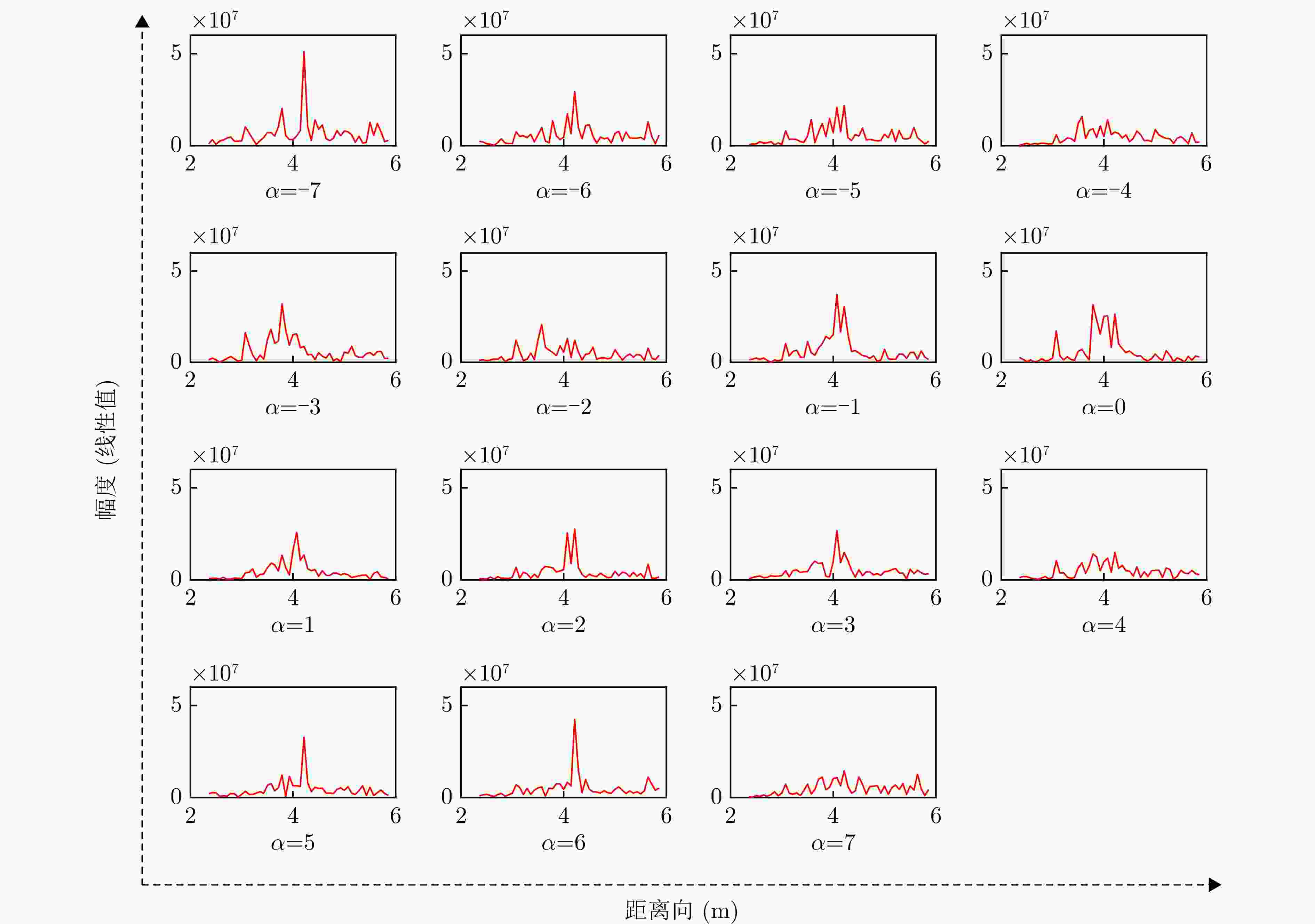
图 16 实测数据在不同模态下的脉压结果
Figure 16. Pulse pressure results of measured data with different modes

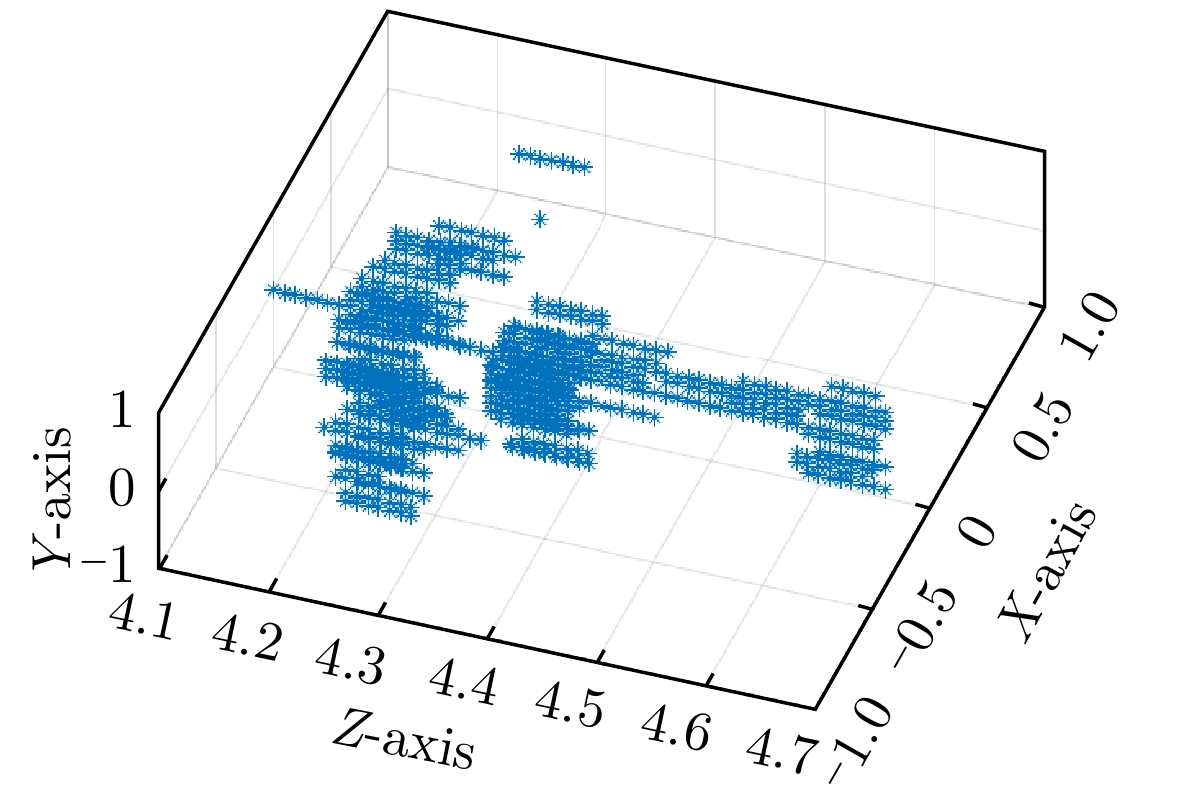
图 18 飞机目标三维成像的二维切面图
Figure 18. Aircraft target imaging results in different dimensions
表 1 不同俯仰位置下信号处理增益变化
Table 1. Signal processing gain of different elevation
俯仰角θ
(rad)有效模态 输入信
噪比(dB)输出信
噪比(dB)归一化信号处理
增益(dB)0 [0] 12.4140 52.3270 39.9130 0.01$\pi $ [–2, 2] 12.4140 52.3231 39.9091 0.02$\pi $ [–4, 4] 12.4140 52.3115 39.8975 0.03$\pi $ [–6, 6] 12.4140 52.2922 39.8782 0.04$\pi $ [–8, 8] 12.4140 52.2653 39.8513 0.05$\pi $ [–10, 10] 12.4140 52.2307 39.8167 0.06$\pi $ [–12, 12] 12.4140 52.1887 39.7747 0.07$\pi $ [–14, 14] 12.4140 52.1393 39.7253 0.08$\pi $ [–16, 16] 12.4140 52.0826 39.6686 0.09$\pi $ [–18, 18] 12.4140 52.0188 39.6048 0.10$\pi $ [–20, 20] 12.4140 51.9482 39.5342 0.11$\pi $ [–23, 23] 12.4133 51.8693 51.4341 0.12$\pi $ [–25, 25] 12.4010 51.7580 39.3570 0.13$\pi $ [–27, 27] 12.2969 51.4341 39.1372 0.14$\pi $ [–28, 28] 11.9384 50.5159 38.5775 0.15$\pi $ [–30, 30] 11.7014 49.8458 38.1444 0.16$\pi $ [–32, 32] 12.2512 51.0137 38.7625 0.17$\pi $ [–34, 34] 12.2907 50.9907 38.7001  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数
Table 2. Simulation parameters
参数 数值 目标1的$R - \theta - \varphi $坐标(m, rad, rad) (300, 0.10$\pi $, 0.055$\pi $) 目标2的$R - \theta - \varphi $坐标(m, rad, rad) (300, 0.15$\pi $, 0.055$\pi $) 雷达UCA阵元数量N (个) 64 UCA半径${r_a}$ (m) 0.09 信号载频${f_{\mathrm{c}}}$ (GHz) 35 信号脉冲周期${T_{\mathrm{p}}}$ ($ \text{μ}\text{s} $) 0.54 带宽B (MHz) 300 OAM范围 [–30, 30]
下载: 导出CSV
表 3 实测参数
Table 3. Experimental parameters
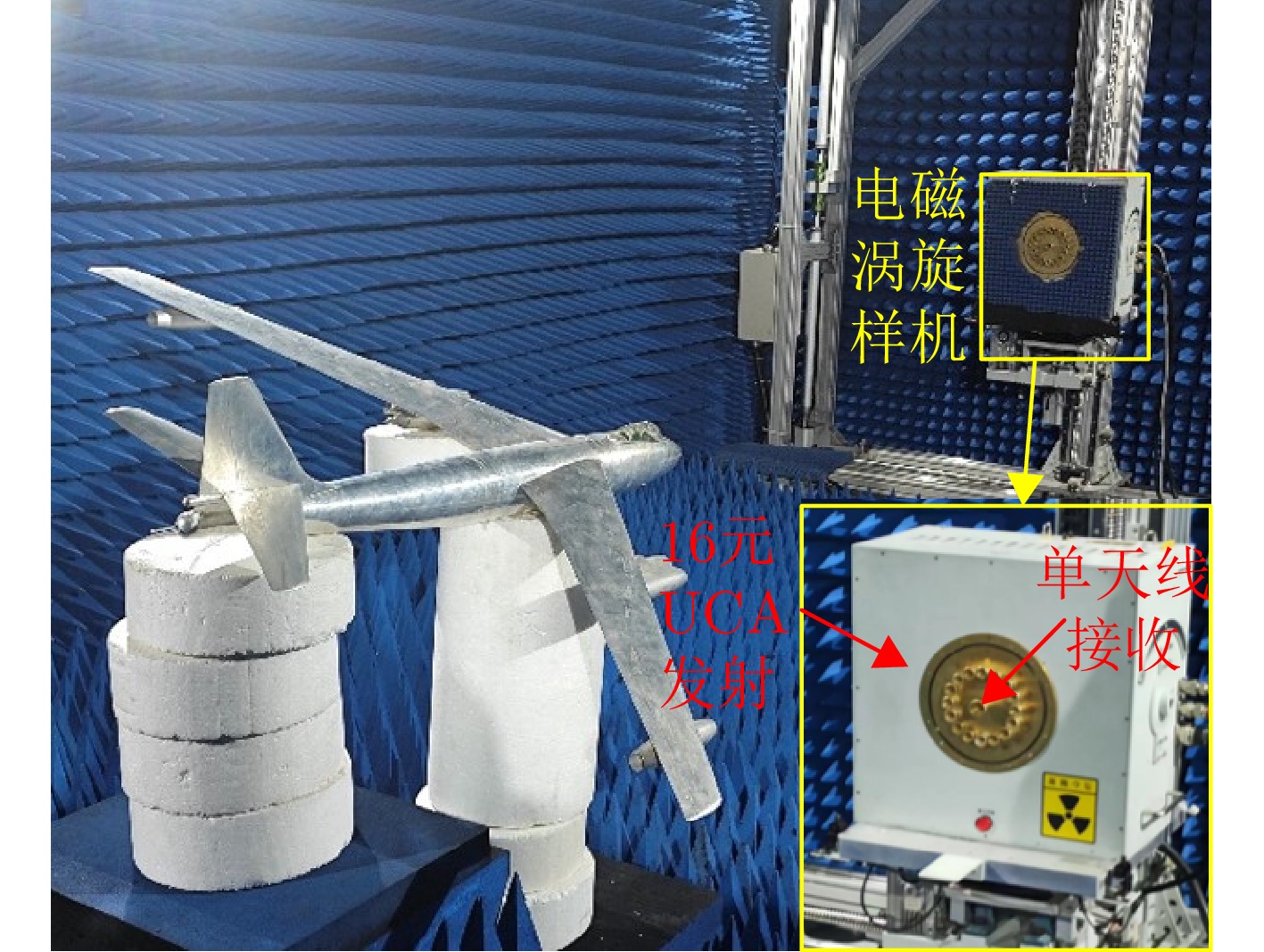
参数 数值 飞机模型中心位置(m) 4.5 飞机模型在XYZ上的跨度(m) (1.5, 0.08, 1.15) 阵元数量N (个) 16 UCA半径${r_a}$ (m) 0.0615 信号载频${f_{\mathrm{c}}}$ (GHz) 35.025 信号脉冲周期${T_{\mathrm{p}}}$ ($ \text{μ}\text{s} $) 0.54 带宽B (MHz) 300 OAM范围 [–7, 7]
下载: 导出CSV
-
[1] SUN Guangcai, XING Mengdao, XIA Xianggen, et al. Multichannel full-aperture azimuth processing for beam steering SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(9): 4761–4778. doi: 10.1109/TGRS.2012.2230267. [2] 宗竹林, 胡剑浩, 朱立东, 等. 编队卫星合成孔径雷达空时二维压缩感知成像[J]. 电波科学学报, 2012, 27(3): 626–636.ZONG Zhulin, HU Jianhao, ZHU Lidong, et al. Formation-flying small satellites SAR imaging algorithm using space-time compressive sensing[J]. Chinese Journal of Radio Science, 2012, 27(3): 626–636. [3] YANIK M E, WANG Dan, and TORLAK M. Development and demonstration of MIMO-SAR mmWave imaging testbeds[J]. IEEE Access, 2020, 8: 126019–126038. doi: 10.1109/ACCESS.2020.3007877. [4] YAO A M and PADGETT M J. Orbital angular momentum: Origins, behavior and applications[J]. Advances in Optics and Photonics, 2011, 3(2): 161–204. doi: 10.1364/AOP.3.000161. [5] ALLEN L, BEIJERSBERGEN M W, SPREEUW R J C, et al. Orbital angular momentum of light and the transformation of Laguerre-Gaussian laser modes[J]. Physical Review Applied, 1992, 45(11): 8185–8189. doi: 10.1103/PhysRevA.45.8185. [6] LIU Kang, LI Xiang, GAO Yue, et al. Microwave imaging of spinning object using orbital angular momentum[J]. Journal of Applied Physics, 2017, 122(12): 124903. doi: 10.1063/1.4991655. [7] 吕坤, 马晖, 刘宏伟. 基于涡旋电磁波体制的三维SAR成像方法[J]. 雷达学报, 2021, 10(5): 691–698. doi: 10.12000/JR21125.LYU Kun, MA Hui, and LIU Hongwei. Three-dimensional imaging using the electromagnetic vortex synthetic aperture radar[J]. Journal of Radars, 2021, 10(5): 691–698. doi: 10.12000/JR21125. [8] GONG Ting, CHENG Yongqiang, LI Xiang, et al. Micromotion detection of moving and spinning object based on rotational Doppler shift[J]. IEEE Microwave and Wireless Components Letters, 2018, 28(9): 843–845. doi: 10.1109/LMWC.2018.2858552. [9] 王建秋, 刘康, 王煜, 等. 涡旋电磁波雷达成像分辨力研究[J]. 雷达学报, 2021, 10(5): 680–690. doi: 10.12000/JR21054.WANG Jianqiu, LIU Kang, WANG Yu, et al. Resolution analysis of vortex electromagnetic radar imaging[J]. Journal of Radars, 2021, 10(5): 680–690. doi: 10.12000/JR21054. [10] 郭桂蓉, 胡卫东, 杜小勇. 基于电磁涡旋的雷达目标成像[J]. 国防科技大学学报, 2013, 35(6): 71–76. doi: 10.3969/j.issn.1001-2486.2013.06.013.GUO Guirong, HU Weidong, and DU Xiaoyong. Electromagnetic vortex based radar target imaging[J]. Journal of National University of Defense Technology, 2013, 35(6): 71–76. doi: 10.3969/j.issn.1001-2486.2013.06.013. [11] BU Xiangxi, ZHANG Zhuo, CHEN Longyong, et al. Implementation of vortex electromagnetic waves high-resolution synthetic aperture radar imaging[J]. IEEE Antennas and Wireless Propagation Letters, 2018, 17(5): 764–767. doi: 10.1109/LAWP.2018.2814980. [12] JIANG Xuefeng, ZHAO Yufei, and ZHANG Chao. Capacity evaluation on the long-distance orbital angular momentum non-orthogonal transmission[C]. 2018 IEEE MTT-S International Wireless Symposium (IWS), Chengdu, China, 2018: 1–4. doi: 10.1109/IEEE-IWS.2018.8400839. [13] FANG Yue, CHEN Jie, WANG Pengbo, et al. A novel image formation method for electromagnetic vortex SAR with orbital-angular-momentum[J]. Progress in Electromagnetics Research M, 2019, 82: 129–137. doi: 10.2528/PIERM19011704. [14] BU Xiangxi, ZHANG Zhuo, CHEN Longyong, et al. Synthetic aperture radar interferometry based on vortex electromagnetic waves[J]. IEEE Access, 2019, 7: 82693–82700. doi: 10.1109/ACCESS.2019.2908209. [15] 袁航, 倪嘉成, 荣楠, 等. 基于单频涡旋电磁波雷达的人体目标步态精细识别[J]. 空军工程大学学报(自然科学版), 2020, 21(6): 39–45. doi: 10.3969/j.issn.1009-3516.2020.06.007.YUAN Hang, NI Jiacheng, RONG Nan, et al. Fine gait recognition of human target with single-frequency vortex electromagnetic wave radar[J]. Journal of Air Force Engineering University (Natural Science Edition), 2020, 21(6): 39–45. doi: 10.3969/j.issn.1009-3516.2020.06.007. [16] WANG Zhaji, SUN Guanqun, ZHANG Fangzheng, et al. Microwave-photonics-based vortex electromagnetic wave generation for high resolution radar imaging[C]. 2022 Asia Communications and Photonics Conference (ACP), Shenzhen, China, 2022: 1687–1690. doi: 10.1109/ACP55869.2022.10088880. [17] MA Hui and LIU Hongwei. Waveform diversity-based generation of convergent beam carrying orbital angular momentum[J]. IEEE Transactions on Antennas and Propagation, 2020, 68(7): 5487–5495. doi: 10.1109/TAP.2020.2981724. [18] 袁铁柱. 涡旋电磁波在雷达成像中的应用研究[D]. [博士论文], 国防科学技术大学, 2017.YUAN Tiezhu. Research on radar imaging using electromagnetic vortex wave[D]. [Ph.D. dissertation], National University of Defense Technology, 2017. [19] LIU Kang, CHENG Yongqiang, GAO Yue, et al. Super-resolution radar imaging based on experimental OAM beams[J]. Applied Physics Letters, 2017, 110(16): 164102. doi: 10.1063/1.4981253. [20] WANG Jianqiu, LIU Kang, LIU Hongyan, et al. 3-D object imaging method with electromagnetic vortex[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 2000512. doi: 10.1109/TGRS.2021.3069914. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

