
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 全球老龄化趋势日益加剧,健康生活理念深入人心,居民对居家健康监测的需求也随之而来。为了减少健康监测对日常活动的影响,非接触式监测系统的需求量激增。然而,目前主流的检测方法存在隐私信任度低、电磁兼容性差和制造成本高等问题。对此,该文提出一种基于超声波雷达的非接触式生命体征信号测量系统——U-Sodar,包括一套基于3发4收MIMO架构的硬件和一套信号处理算法。其中U-Sodar本振采用分频技术,相位噪声低,检测精度高;接收机采用前端直接采样技术,在简化结构的同时有效减少外部噪声;发射采用可调PWM直接驱动,可发射多种超声波形,具备软件定义超声波系统特性。U-Sodar的信号处理算法采用信号弦长的图处理技术,利用图片滤波后重构的方法可在5 dB信噪比下实现信号相位的准确恢复。试验测试了U-Sodar系统的抗干扰性能与穿透性能,证明了超声穿透是依赖材料孔隙而非跨介质振动传导。并推导了给定信噪比与正确解调概率下的最小可测量位移。实际生命体征信号测量实验中,U-Sodar可分别在3.0 m和1.5 m距离内实现呼吸率和心率的准确测量,在1.0 m内可测得心跳波形。实验结果证明了U-Sodar超声波雷达在非接触式生命体征检测应用中的可行性及发展潜力。Abstract: Amidst the global aging trend and a growing emphasis on healthy living, there is an increased demand for unobtrusive home health monitoring systems. However, the current mainstream detection methods in this regard suffer from low privacy trust, poor electromagnetic compatibility, and high manufacturing costs. To address these challenges, this paper introduces a noncontact vital signal collection device using Ultrasonic radar (U-Sodar), including a set of hardware based on a three-transmitter four-receiver Multiple Input Multiple Output (MIMO) architecture and a set of signal processing algorithms. The U-Sodar local oscillator uses frequency division technology with low phase noise and high detection accuracy; the receiver employs front-end direct sampling technology to simplify the involved structure and effectively reduce external noise, and the transmitter uses an adjustable PWM direct drive to emit various ultrasonic waveforms, possessing software-defined ultrasonic system characteristics. The signal processing algorithm of U-Sodar adopts the graph processing technique of signal chord length and realizes accurate recovery of signal phase under 5 dB Signal-to-Noise Ratio (SNR) using picture filtering and then reconstruction. Experimental tests on the U-Sodar system demonstrated its anti-interference and penetration capabilities, proving that ultrasonic penetration relies on material porosity rather than intermedium vibration conduction. The minimum measurable displacement for a given SNR with correct demodulation probability is also derived. The results of actual human vital sign signal measurement experiments indicate that U-Sodar can accurately measure respiration and heartbeat at 3.0 m and 1.5 m, respectively, and the heartbeat waveforms can be measured within 1.0 m. Overall, the experimental results demonstrate the feasibility and application potential of U-Sodar in noncontact vital sign detection.
-
Key words:
- Non-contact detection /
- Vital signals detection /
- CW radar /
- Ultrasound /
- U-Sodar
-
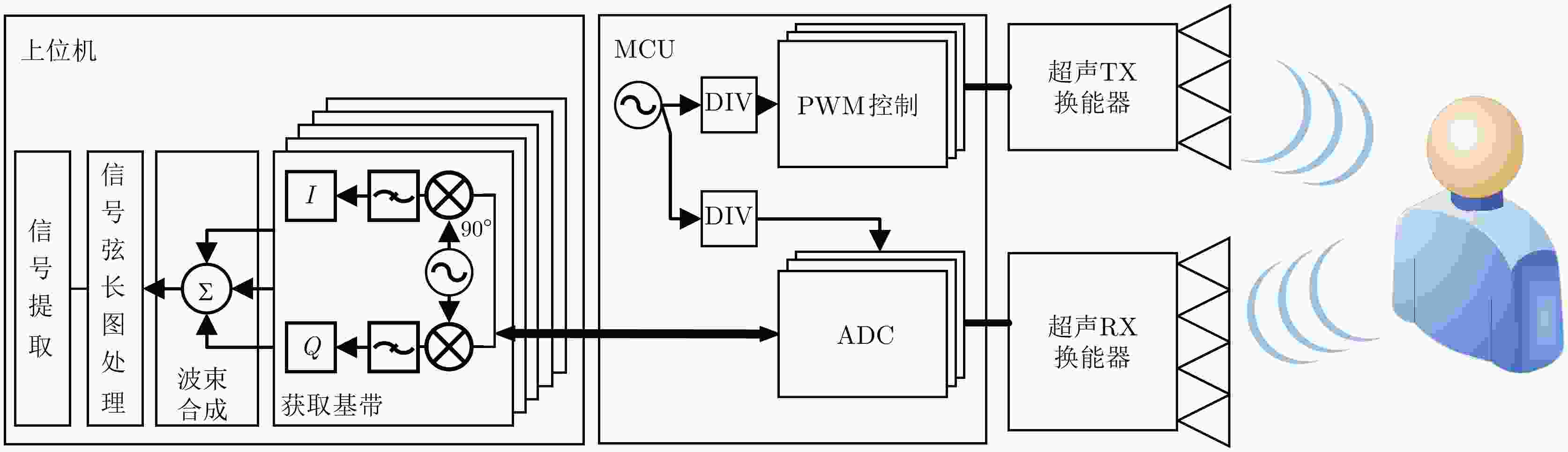
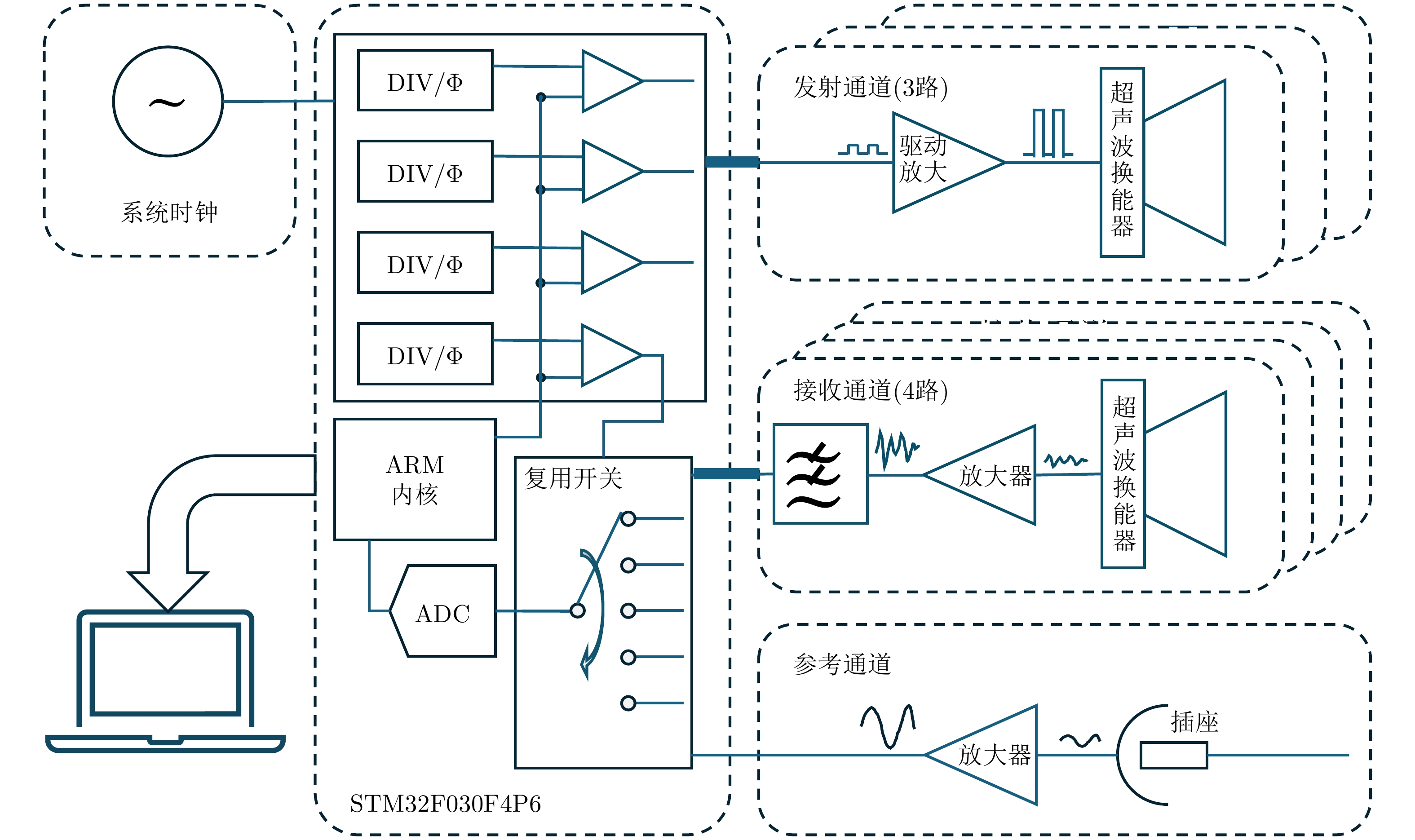
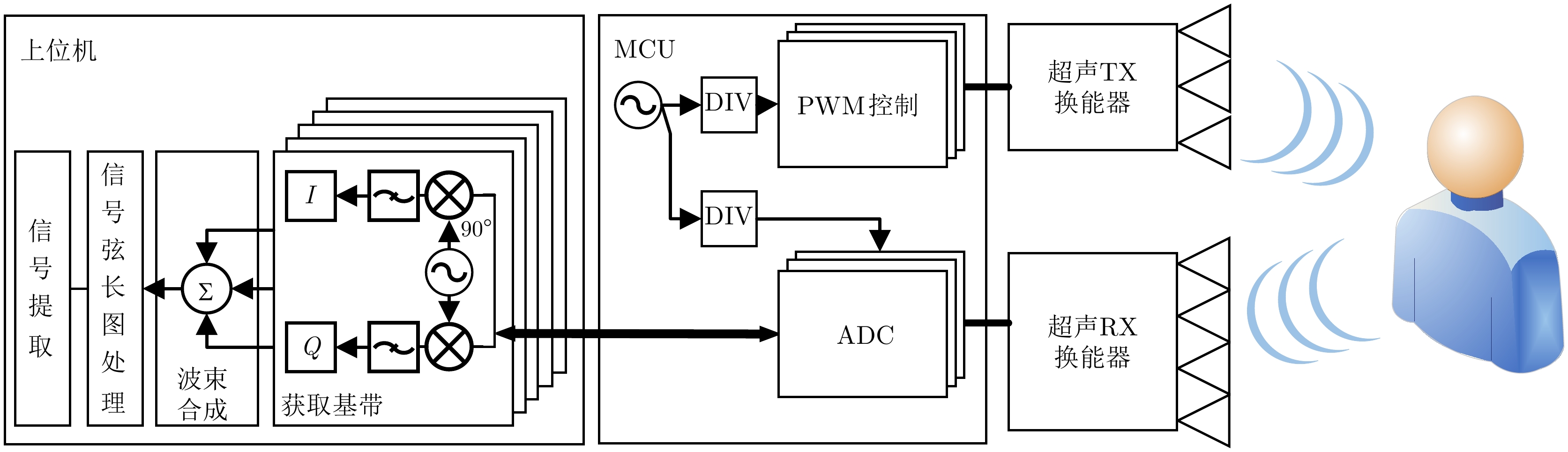
图 1 基于U-Sodar的人体生命体征信号测量示意图
Figure 1. Overview of U-Sodar vital signal monitoring system
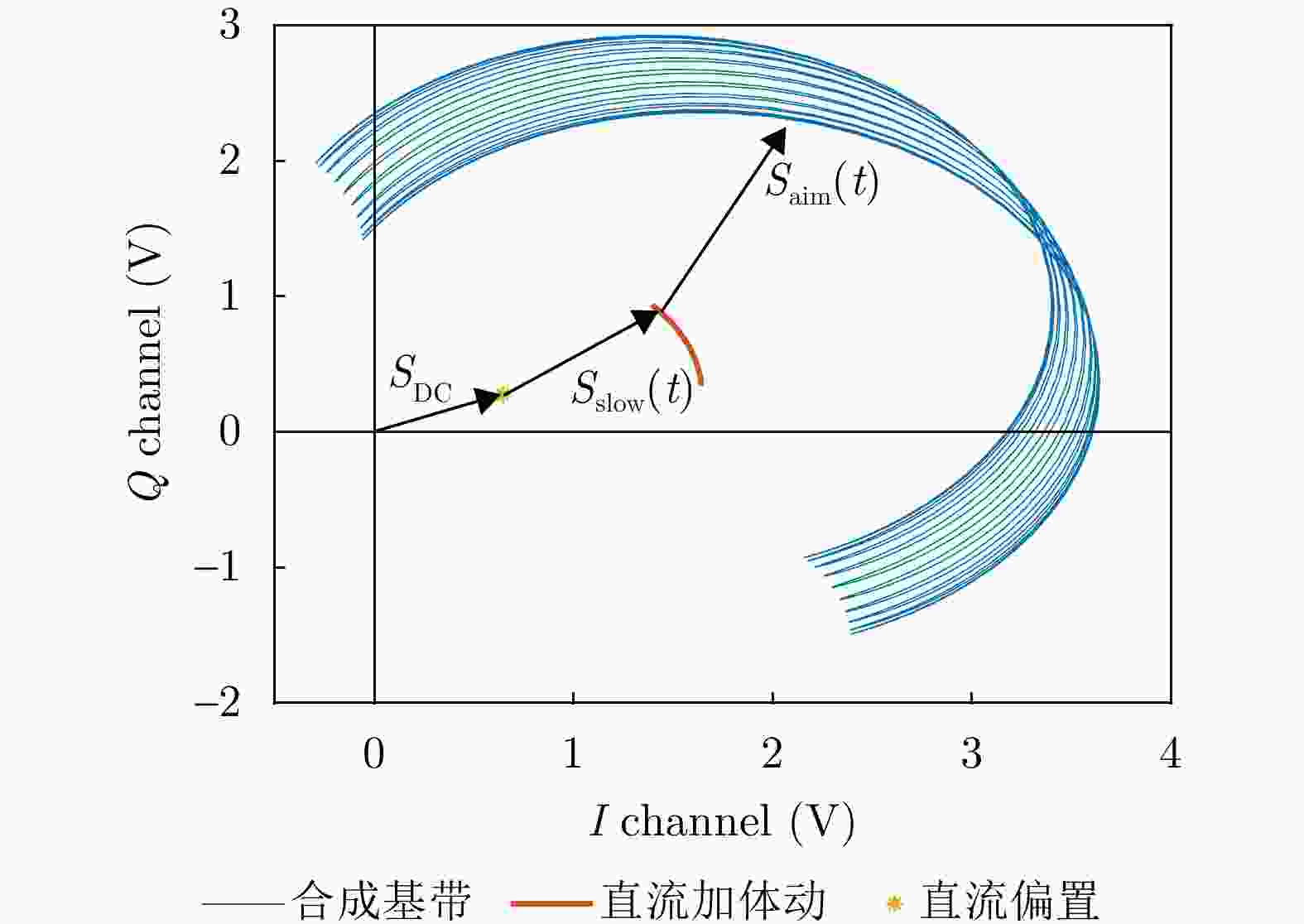
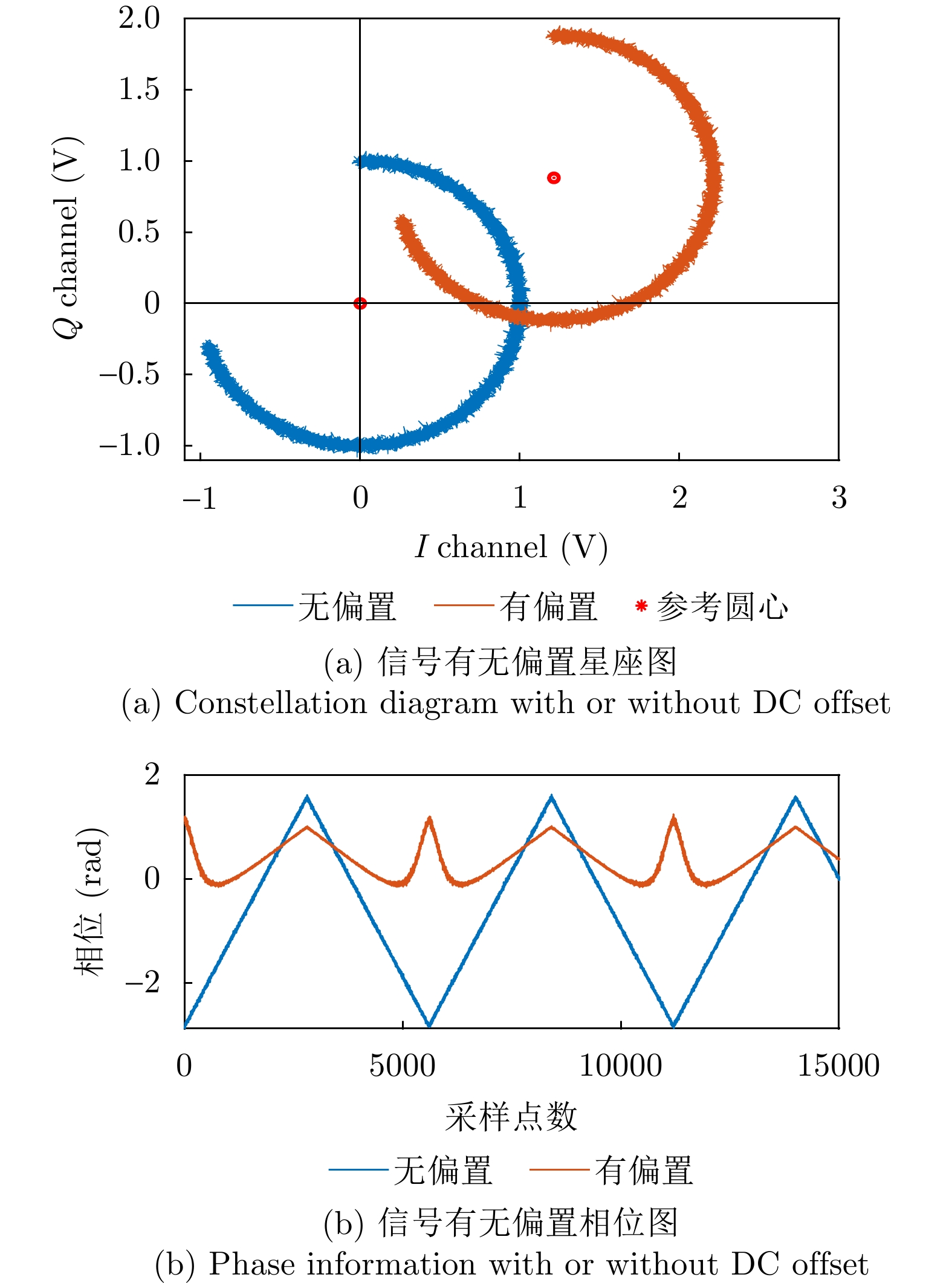
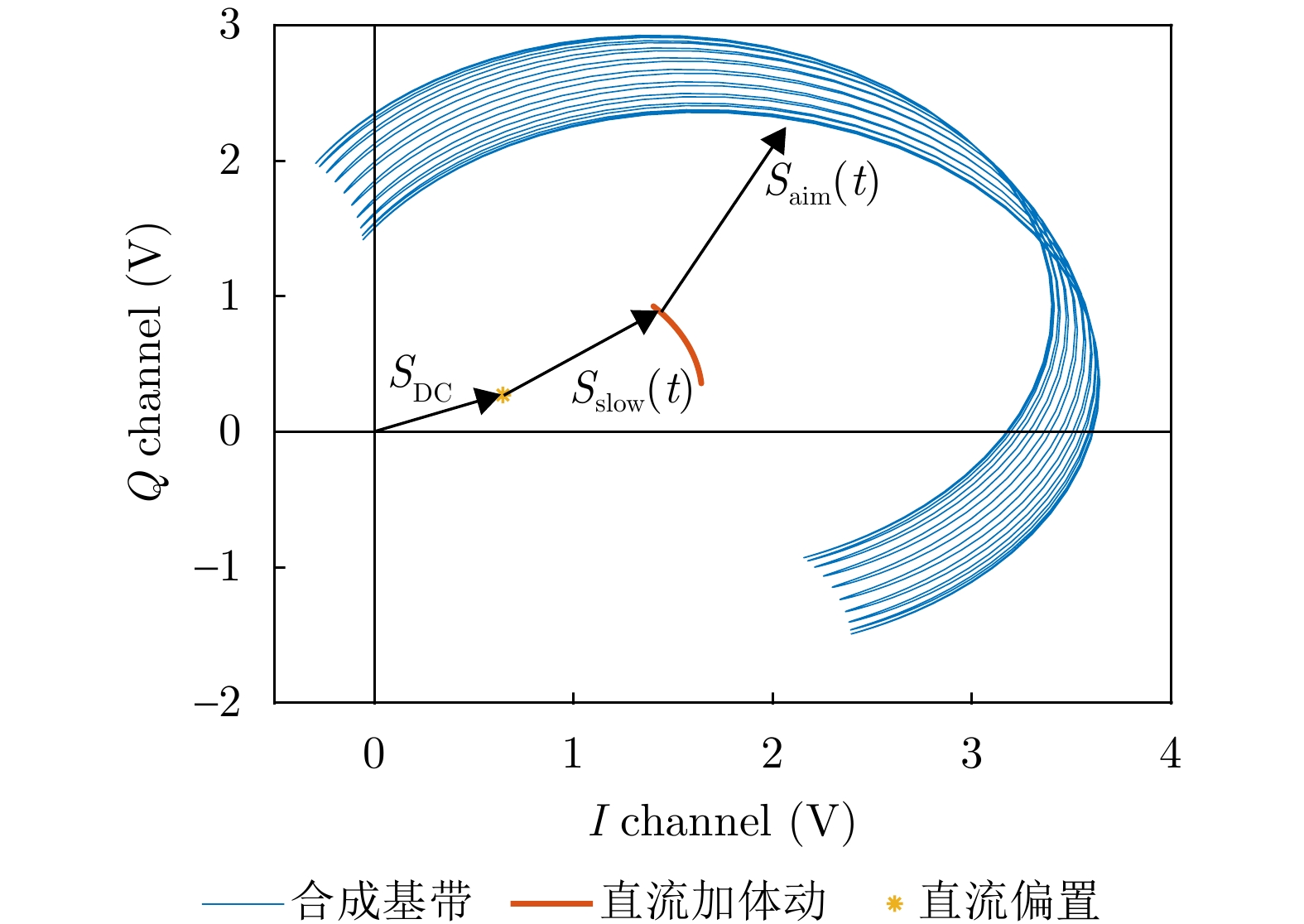
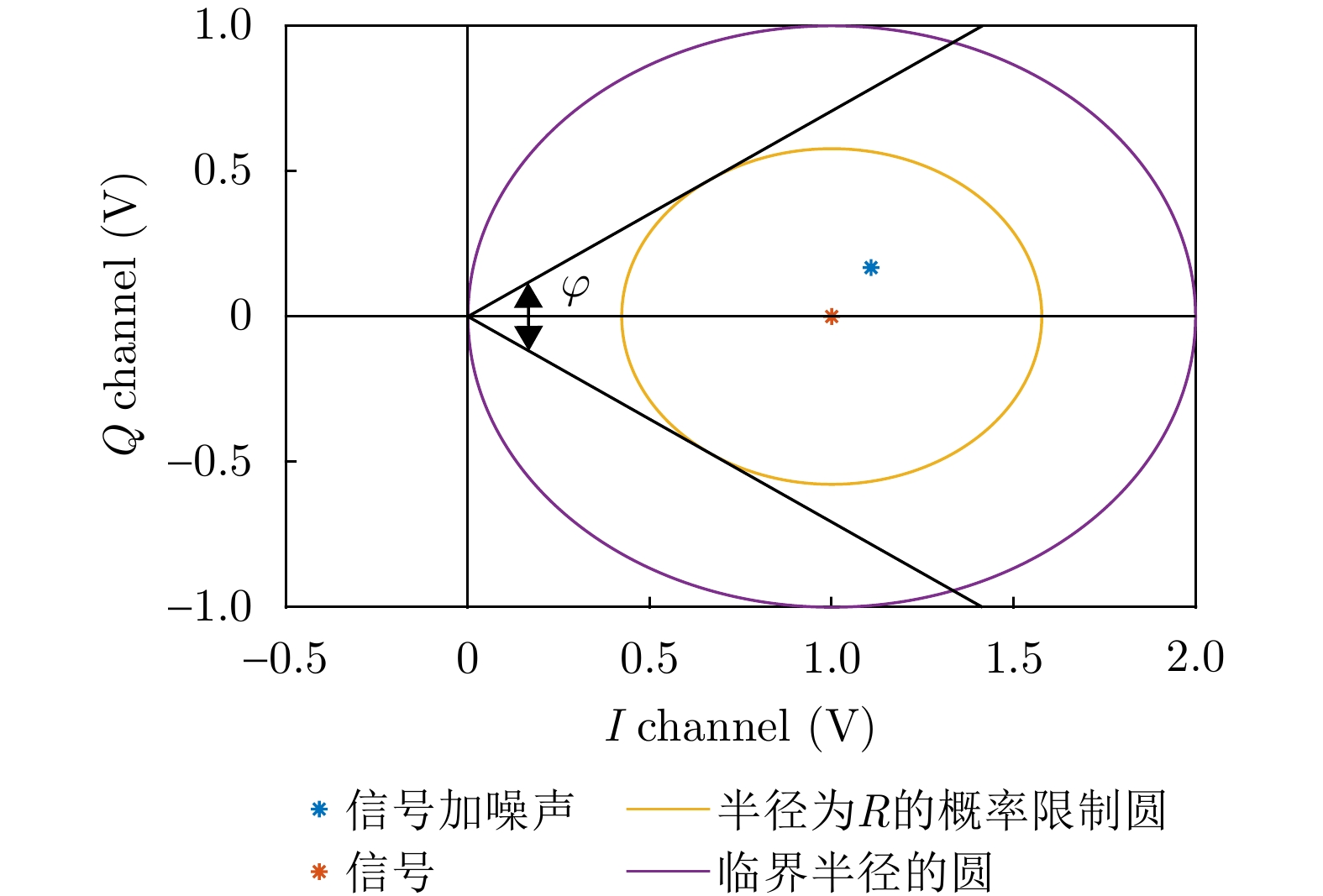
图 3 回波信号基带组成的星座图示意图
Figure 3. Constellation diagram depicting the baseband composition of the echo signal
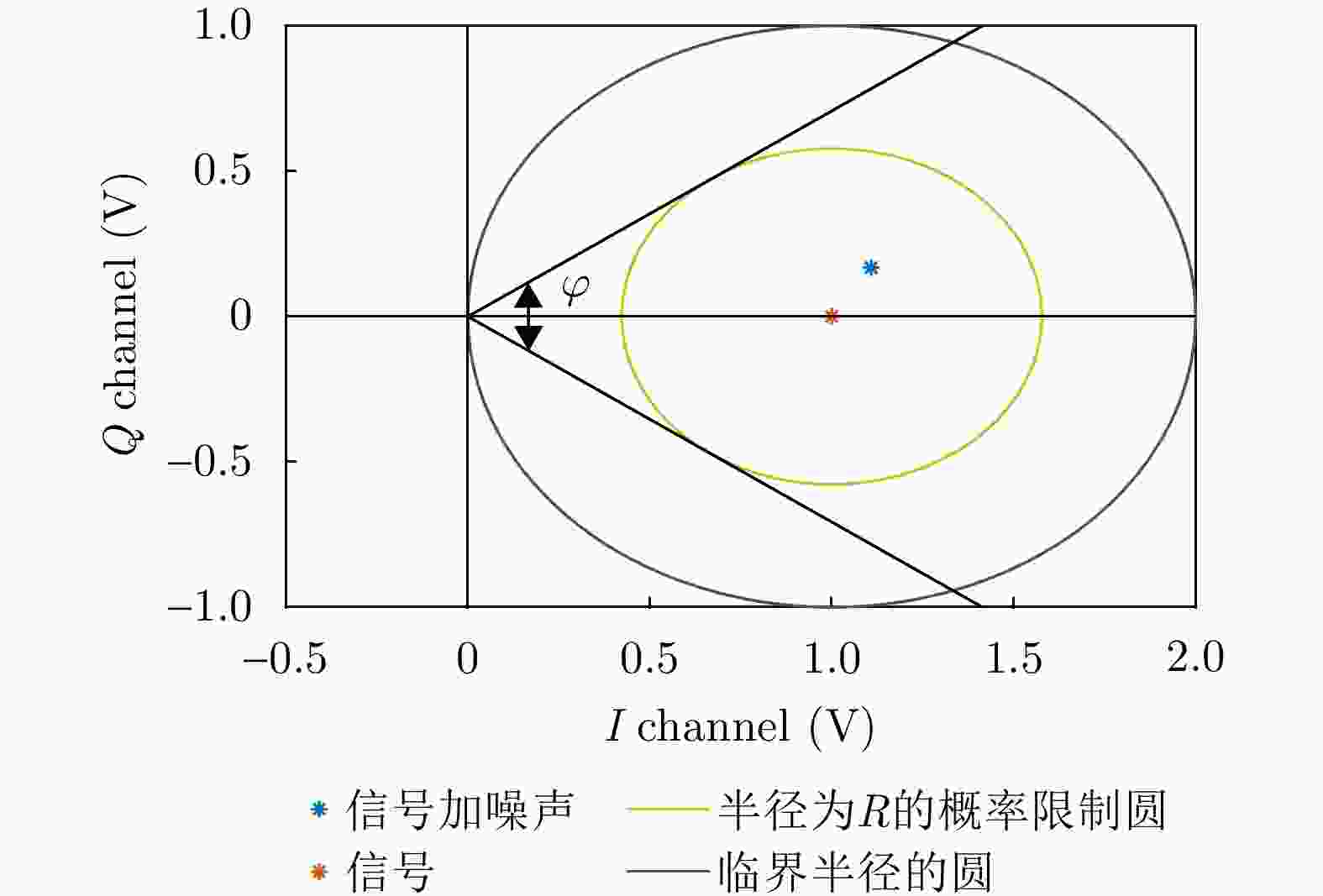
图 4 含噪信号在相位解调中的解调误差示意图
Figure 4. Schematic of demodulation error in phase demodulation of noise-containing signals

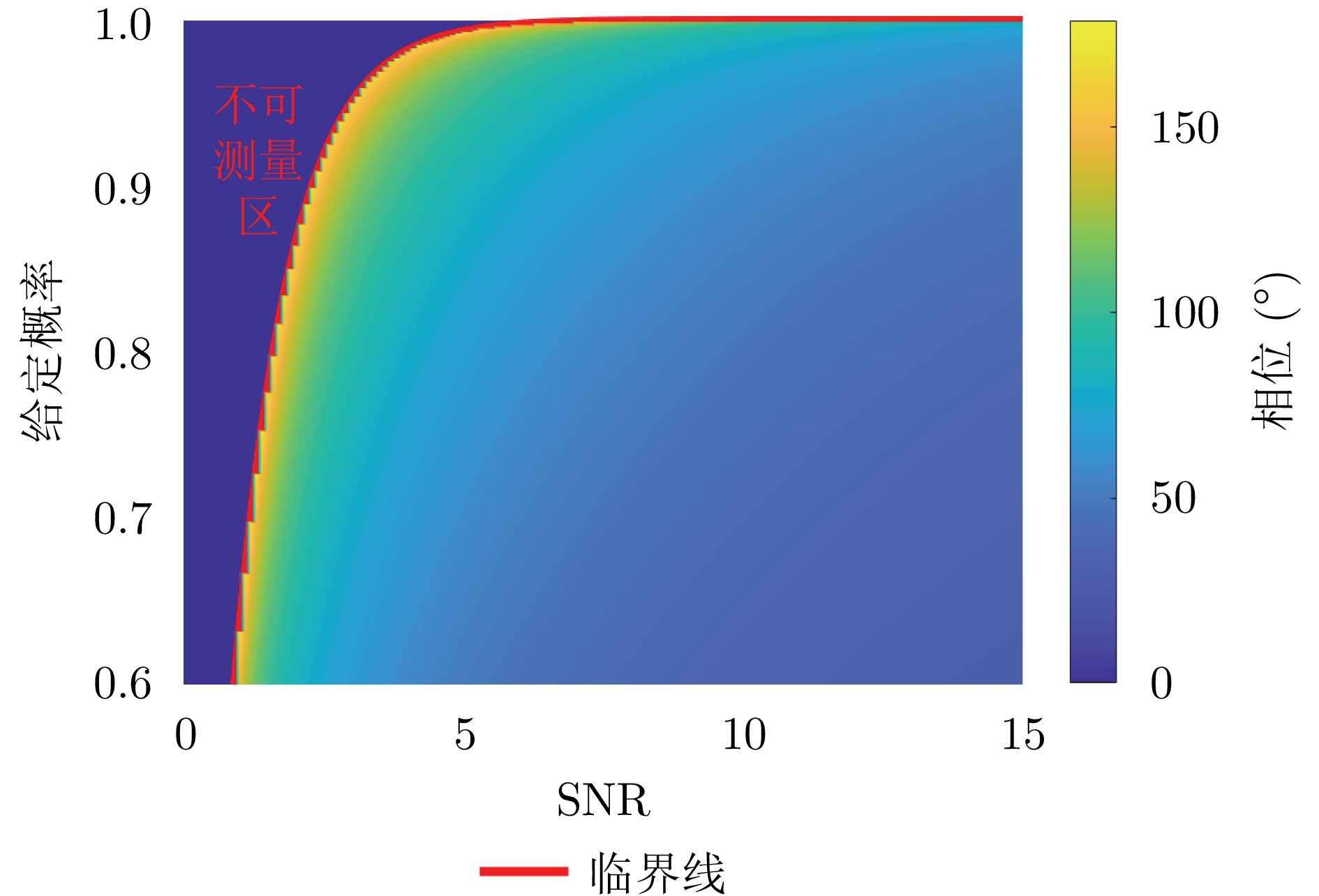
图 5 给定信噪比与解调正确概率下的最小可测量相差图
Figure 5. The minimum measurable phase difference for a given SNR and probability of correct demodulation
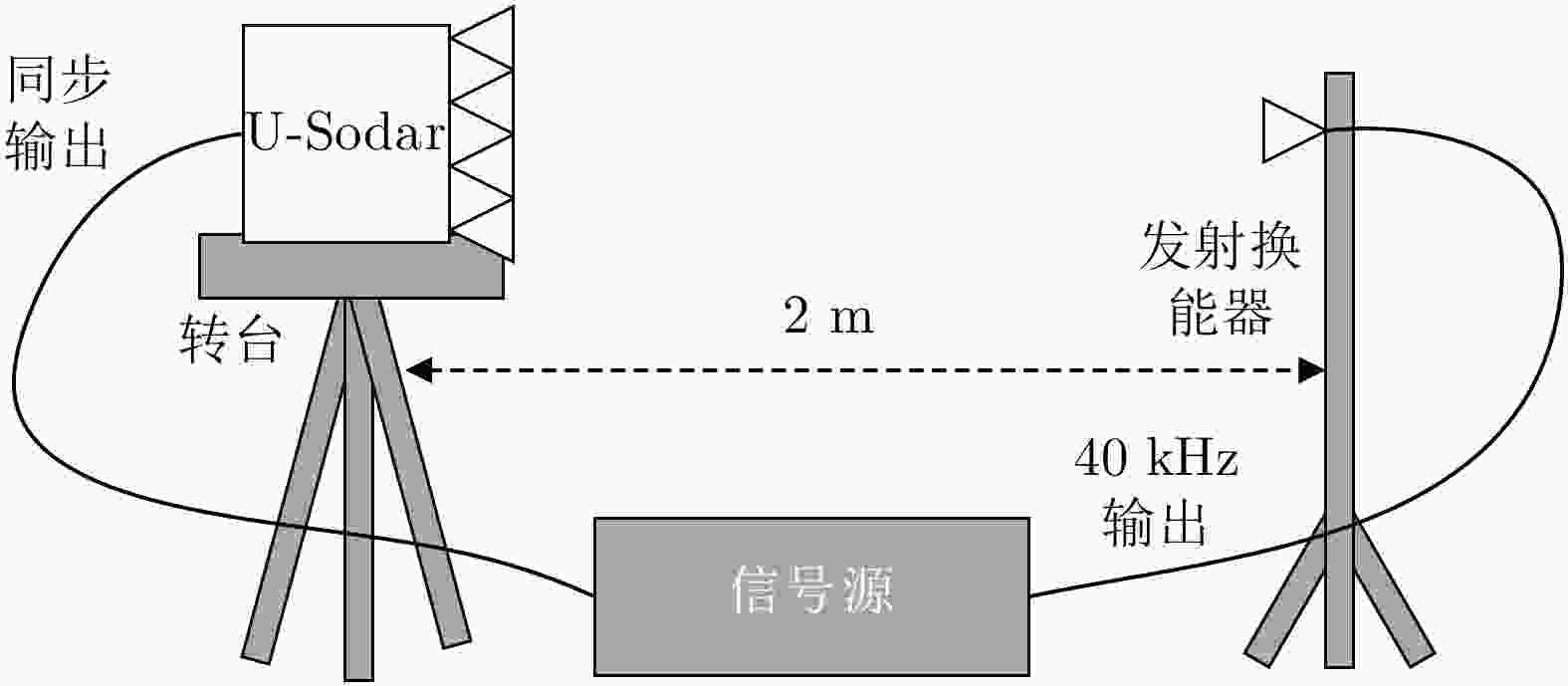
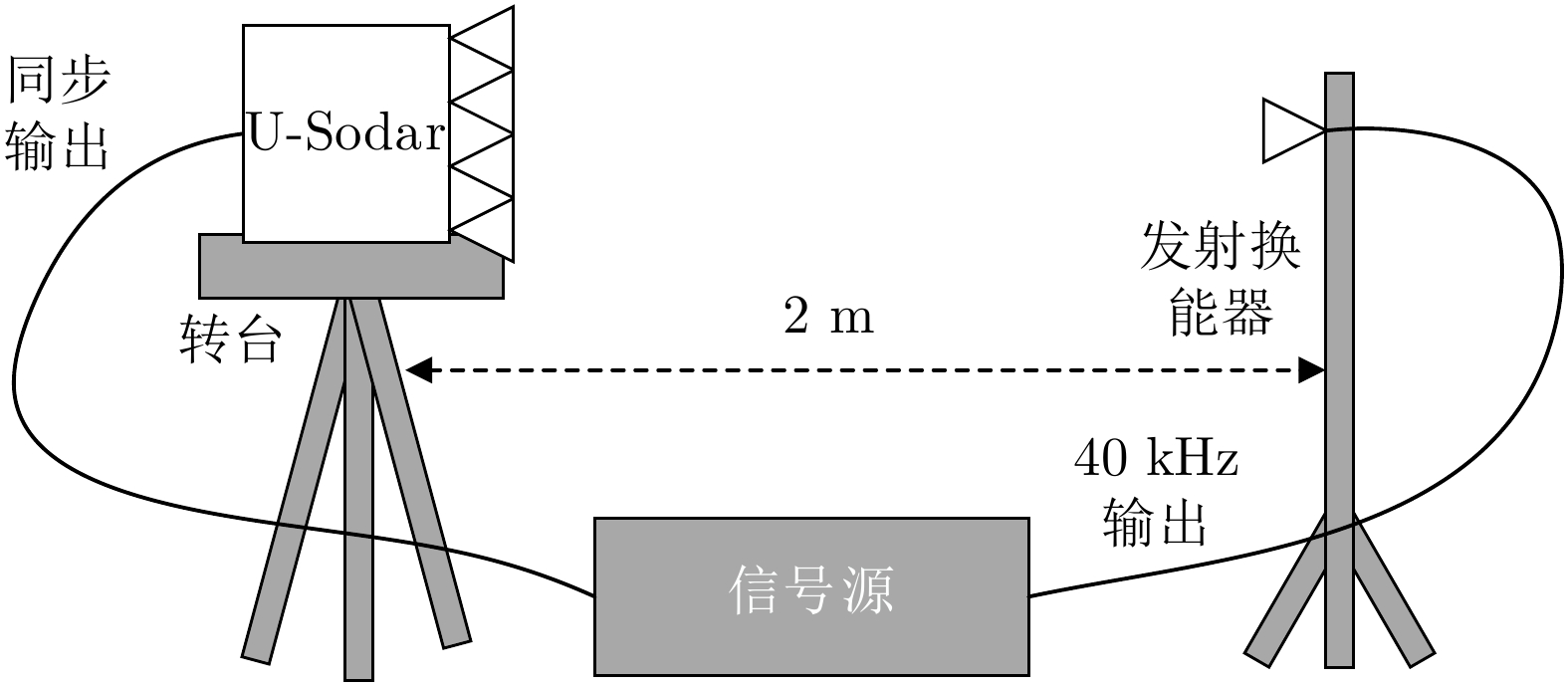
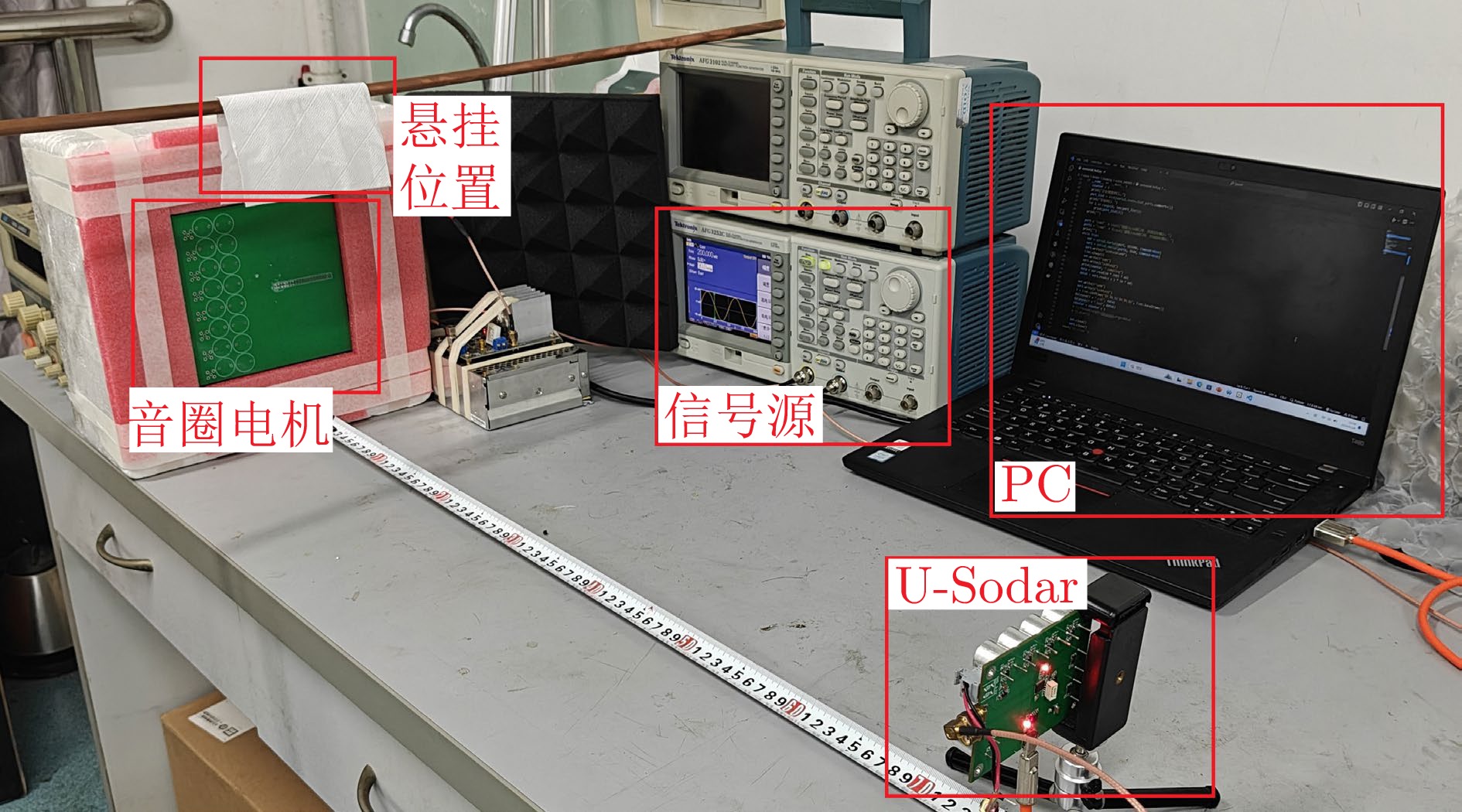
图 8 U-Sodar方向图测试场景布置
Figure 8. Arrangement of the test scene for U-Sodar directional diagram testing
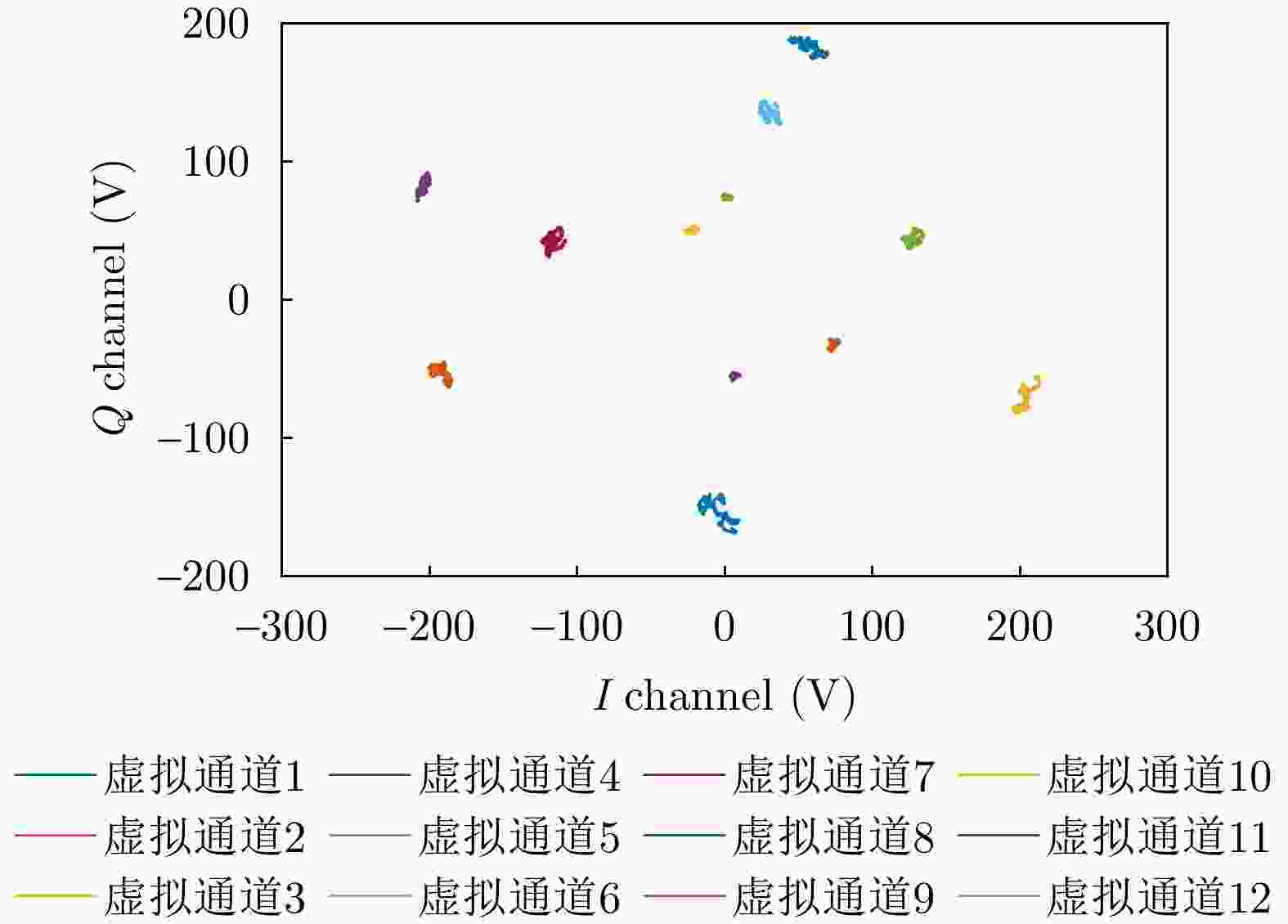
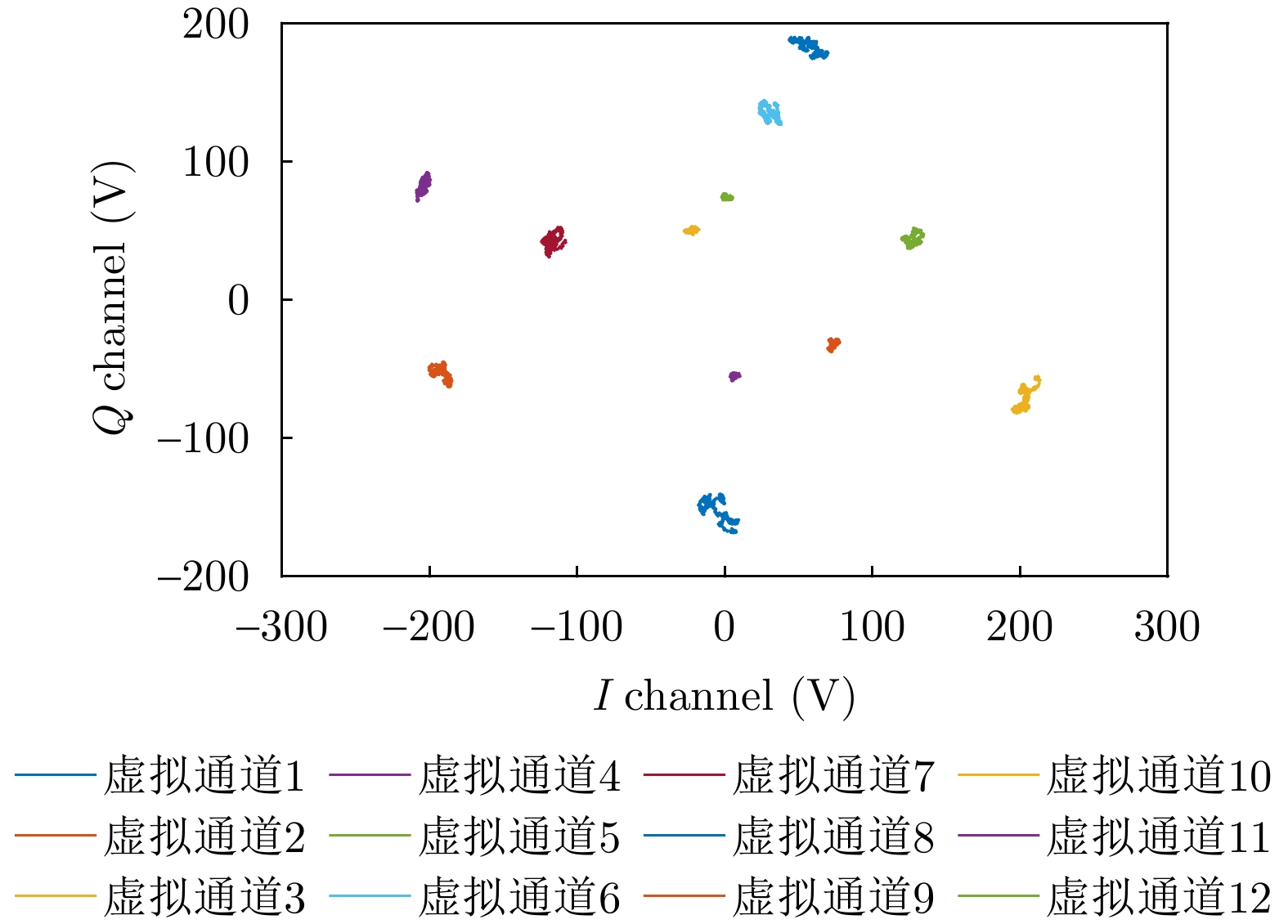
图 15 各通道测量静止墙面信号矢量图
Figure 15. Measurement of stationary wall signal vector diagram for each channel

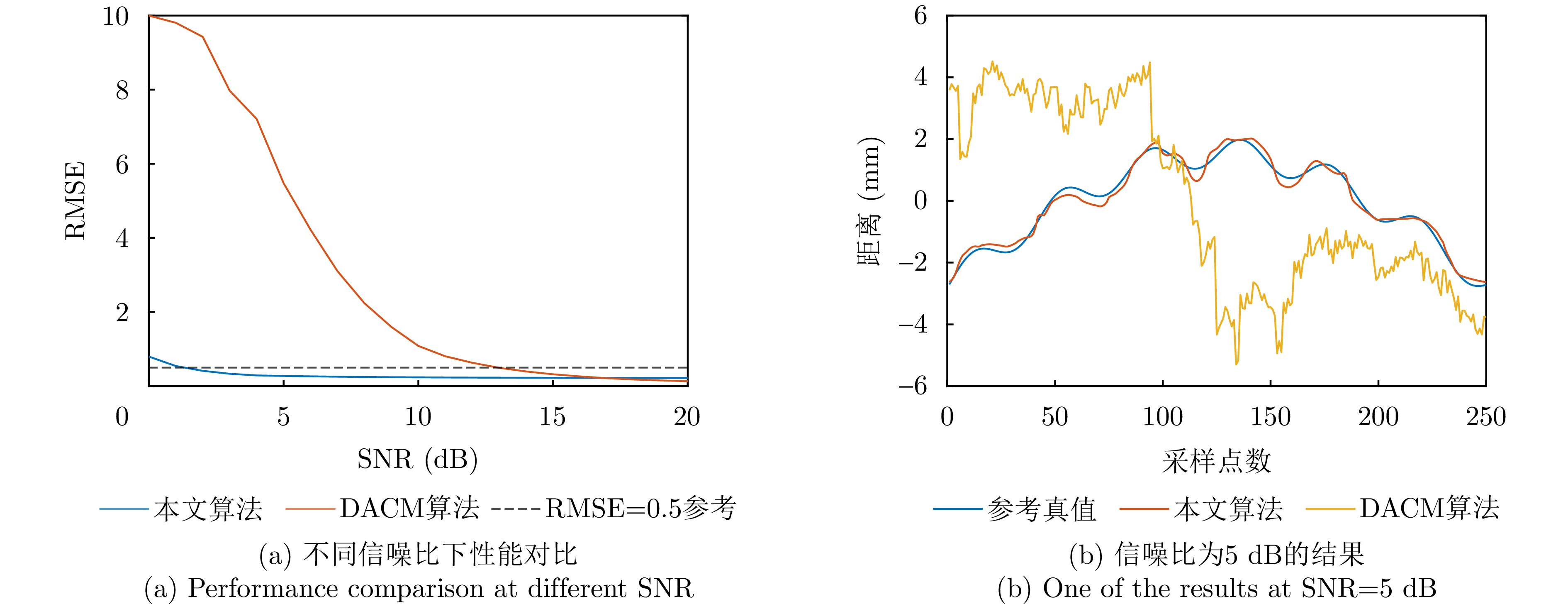
图 20 不同信噪比信号处理结果对比
Figure 20. Comparison of signal processing results with different signal-to-noise ratios

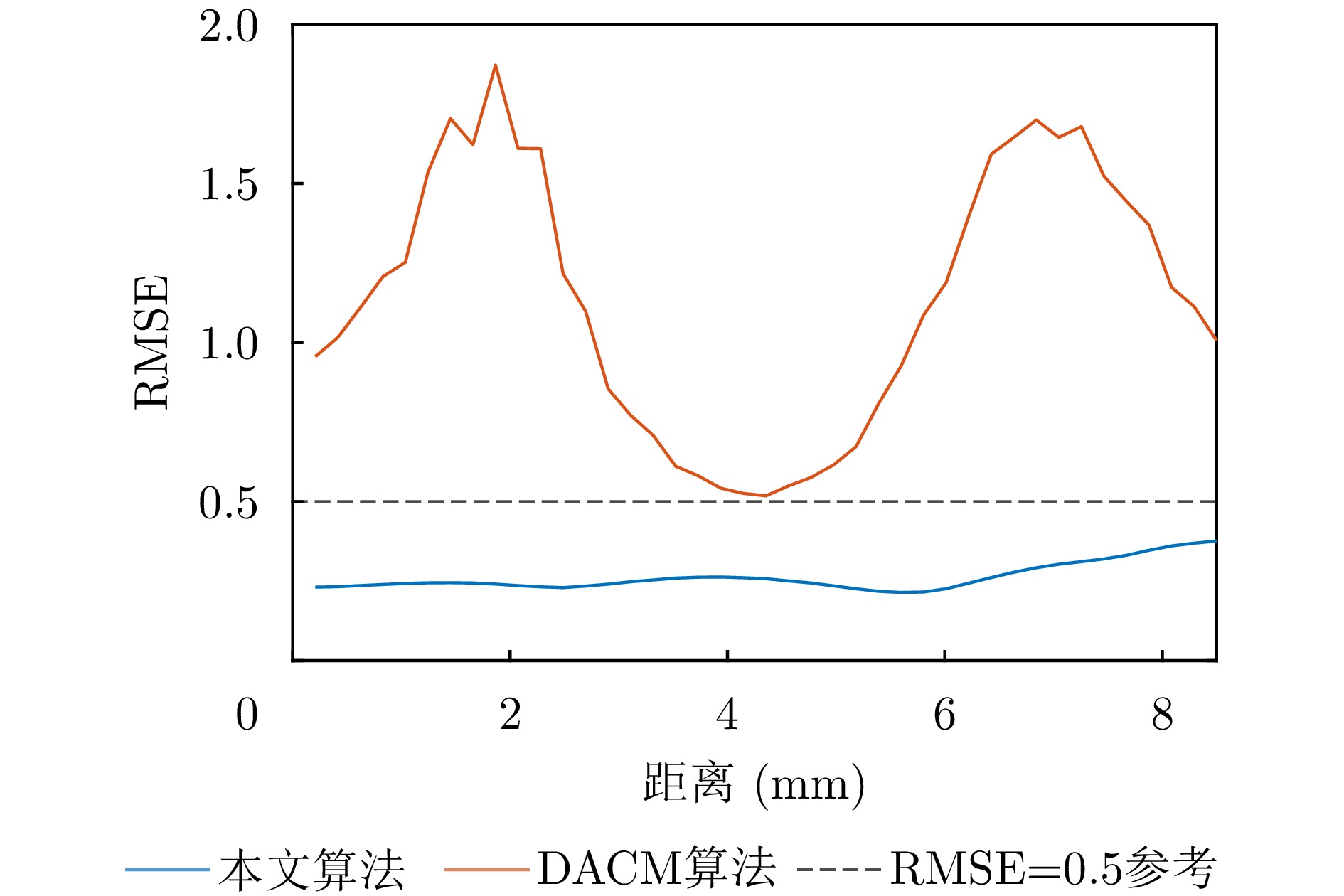
图 21 不同体动幅度模拟结果对比
Figure 21. Comparison of simulation results for different body movement distances
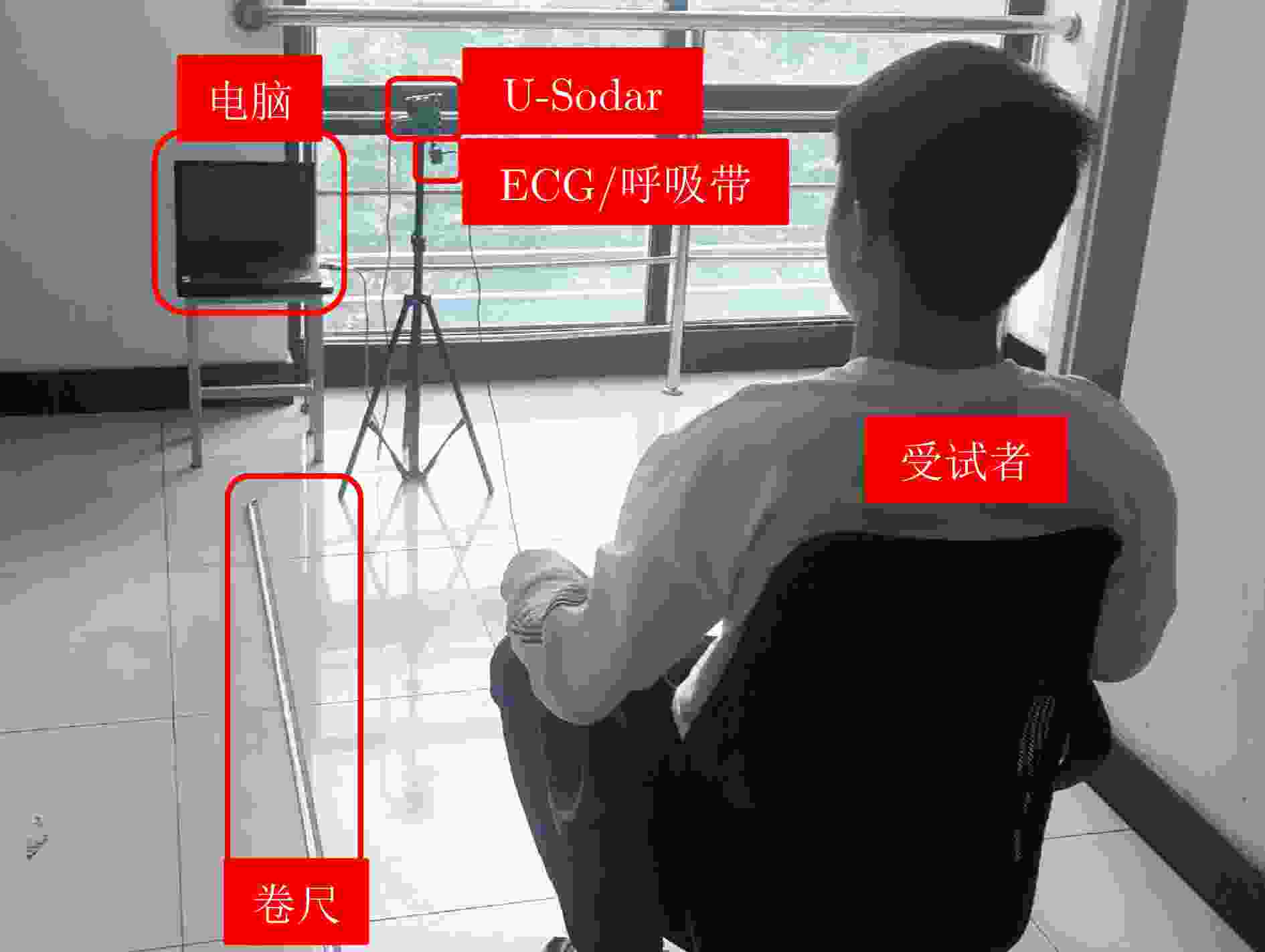
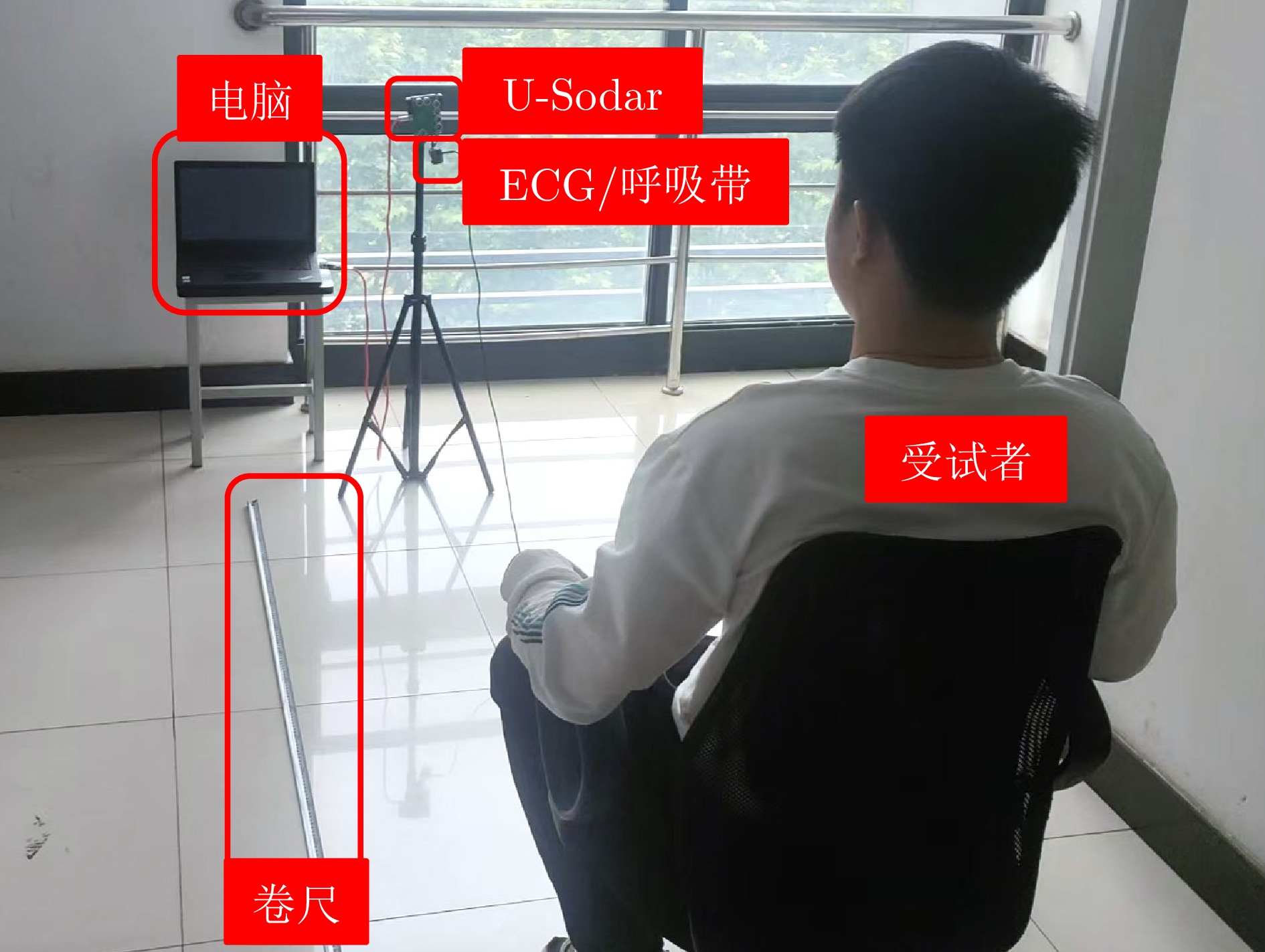
图 22 基于U-Sodar的生命体征测量实验场景示意图
Figure 22. Schematic of the experimental setup for measuring vital signs with U-Sodar
表 1 各类型非接触测量方案比较
Table 1. Comparing various types of non-contact measurement schemes
比较内容 可见光/红外光 微波雷达 声学信号 U-Sodar 隐私保护 – • – • 毫米级位移测量 – • – • 信号来向区分 • • – • 抗电磁干扰 • – • • 无电磁辐射 • – • • 穿透能力 – • • • 环境适应能力 – • – – 目前设备体积 • • • – 设备成本 – – • • 注:•为优秀,–为较差。  下载: 导出CSV
下载: 导出CSV
表 2 U-Sodar系统的关键芯片型号
Table 2. U-Sodar system key chip models
芯片功能 芯片型号 主控芯片 STM32F030F4P6 发射驱动芯片 SRV8837 接收放大器芯片 MS8051 LDO电源芯片 RT9193 逻辑门芯片 SN74LVC1G02DCKR USB串口转换芯片 CH340N 收发换能器探头 TCT40-16
下载: 导出CSV
表 3 受试者信息
Table 3. Volunteer information
受试者编号 性别 年龄 身高(cm) 体重(kg) BMI (kg/m2) 标识色 1 男 26 173 60.0 20.0 棕 2 男 24 180 78.5 24.2 蓝 3 男 23 178 71.0 22.4 红 4 女 24 166 63.0 22.9 绿 5 女 22 155 46.0 19.1 紫 注:根据中国BMI标准:≤18.4为偏瘦、18.5~23.9为正常、24.0~27.9为过重、≥28为肥胖。
下载: 导出CSV
-
[1] United Nations. Ageing[EB/OL]. https://www.un.org/en/global-issues/ageing, 2024. [2] 民政部, 全国老龄办. 2022年度国家老龄事业发展公报[EB/OL]. https://www.gov.cn/lianbo/bumen/202312/P020231214405906944856.pdf, 2023.Ministry of Civil Affairs of China, National Office for Aging of China. 2022 national report on the development of aging services[EB/OL] https://www.gov.cn/lianbo/bumen/202312/P020231214405906944856.pdf, 2023. [3] PIRZADA P, WILDE A, and HARRIS-BIRTILL D. Remote photoplethysmography for heart rate and blood oxygenation measurement: A review[J]. IEEE Sensors Journal, 2024, 24(15): 23436–23453. doi: 10.1109/JSEN.2024.3405414. [4] WANG Wenjin, DEN BRINKER A C, STUIJK S, et al. Algorithmic principles of remote PPG[J]. IEEE Transactions on Biomedical Engineering, 2017, 64(7): 1479–1491. doi: 10.1109/TBME.2016.2609282. [5] KOBAYASHI L, CHUCK C C, KIM C K, et al. Comparison of video photoplethysmography, video motion analysis, and passive infrared thermography against traditional contact methods for acquiring vital signs in emergency department populations[C]. 2023 IEEE 14th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference, New York, USA, 2023: 134–141. doi: 10.1109/UEMCON59035.2023.10316088. [6] PEREIRA C B, YU Xinchi, BLAZEK V, et al. Robust remote monitoring of breathing function by using infrared thermography[C]. 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Milan, Italy, 2015: 4250–4253. doi: 10.1109/EMBC.2015.7319333. [7] 方震, 简璞, 张浩, 等. 基于FMCW雷达的非接触式医疗健康监测技术综述[J]. 雷达学报, 2022, 11(3): 499–516. doi: 10.12000/JR22019.FANG Zhen, JIAN Pu, ZHANG Hao, et al. Review of noncontact medical and health monitoring technologies based on FMCW radar[J]. Journal of Radars, 2022, 11(3): 499–516. doi: 10.12000/JR22019. [8] XIONG Junjun, HONG Hong, XIAO Lei, et al. Vital signs detection with difference beamforming and orthogonal projection filter based on SIMO-FMCW radar[J]. IEEE Transactions on Microwave Theory and Techniques, 2023, 71(1): 83–92. doi: 10.1109/TMTT.2022.3181129. [9] MA Yuanren, ZHAO Heng, ZHUANG Zhongxu, et al. Sleep-disordered breathing detection based on radar-pulse oximeter sensor fusion[C]. 2023 Asia-Pacific Microwave Conference, Taipei, China, 2023: 260–262. doi: 10.1109/APMC57107.2023.10439668. [10] SUN Li, BAI Ge, LUO Changhao, et al. A large-scale movement path fitting based phase compensation algorithm for FMCW radar vital sign detection[C]. 2024 IEEE Topical Conference on Wireless Sensors and Sensor Networks, San Antonio, USA, 2024: 37–40. doi: 10.1109/WiSNeT59910.2024.10438585. [11] 工业和信息化部. 中华人民共和国无线电频率划分规定[EB/OL]. https://www.gov.cn/zhengce/zhengceku/2018-12/31/content_5439640.htm, 2023.Ministry of Industry and Information Technology of China. Provisions on the allocation of radio frequencies of the People’s Republic of China[EB/OL]. https://www.gov.cn/zhengce/zhengceku/2018-12/31/content_5439640.htm, 2023. [12] 国际电信联盟. ITU-R SM.2093-4[EB/OL]. https://www.itu.int/dms_pub/itu-r/opb/rep/R-REP-SM.2093-4-2021-PDF-C.pdf, 2021.ITU. ITU-R SM.2093-4[EB/OL]. https://www.itu.int/dms_pub/itu-r/opb/rep/R-REP-SM.2093-4-2021-PDF-C.pdf, 2021. [13] 国家药品监督管理局. YY 9706.102-2021 医用电气设备 第1-2部分: 基本安全和基本性能的通用要求 并列标准: 电磁兼容 要求和试验[S]. 北京: 中国标准出版社, 2021.National Medical Products Administration. YY 9706.102-2021 Medical electrical equipment—Part 1-2: General requirements for basic safety and essential performance—collateral standard: Electromagnetic compatibility—requirements and tests[S]. Beijing: Standards Press of China, 2021. [14] Micradar. Healthy care radar[EB/OL]. https://en.micradar.cn/, 2024. [15] NAM Y, REYES B A, and CHON K H. Estimation of respiratory rates using the built-in microphone of a smartphone or headset[J]. IEEE Journal of Biomedical and Health Informatics, 2016, 20(6): 1493–1501. doi: 10.1109/JBHI.2015.2480838. [16] FUJITA Y, WATANABE K, KOBAYASHI K, et al. Development of system for unrestrained measurement of vital signs in the bathroom[C]. SICE Annual Conference 2011, Tokyo, Japan, 2011: 2322–2325. [17] DAFNA E, HALEVI M, BEN OR D, et al. Estimation of macro sleep stages from whole night audio analysis[C]. Annu Int Conf IEEE Eng Med Biol Soc 2016, Florida, USA, 2016: 2847–2850. doi: 10.1109/EMBC.2016.7591323. [18] WANG Zhi, ZHANG Fusang, LI Siheng, et al. Exploiting passive beamforming of smart speakers to monitor human heartbeat in real time[C]. 2021 IEEE Global Communications Conference, Madrid, Spain, 2021: 1–6. doi: 10.1109/GLOBECOM46510.2021.9685922. [19] 王军强. 噪声敏感建筑隔声与声舒适性要求[J]. 声学技术, 2023, 42(1): 57–61. doi: 10.16300/j.cnki.1000-3630.2023.01.010.WANG Junqiang. Requirements for sound insulation and sound comfort of noise-sensitive buildings[J]. Technical Acoustics, 2023, 42(1): 57–61. doi: 10.16300/j.cnki.1000-3630.2023.01.010. [20] 国家环境保护总部. GB 22337-2008 社会生活环境噪声排放标准[S]. 北京: 中国环境科学出版社, 2008.National Environmental Protection Headquarters. GB 22337-2008 Emission standard for community noise[S]. Beijing: China Environmental Press, 2008. [21] AL-NAJI A, AL-ASKERY A J, GHARGHAN S K, et al. A system for monitoring breathing activity using an ultrasonic radar detection with low power consumption[J]. Journal of Sensor and Actuator Networks, 2019, 8(2): 32. doi: 10.3390/jsan8020032. [22] AMBROSANIO M, FRANCESCHINI S, GRASSINI G, et al. A multi-channel ultrasound system for non-contact heart rate monitoring[J]. IEEE Sensors Journal, 2020, 20(4): 2064–2074. doi: 10.1109/JSEN.2019.2949435. [23] WANG Yili. Vital signs estimation scheme based on autocorrelation and variational mode decomposition using ultra-wide band radar[C]. 2023 8th International Conference on Intelligent Computing and Signal Processing, Xi’an, China, 2023: 350–354. doi: 10.1109/ICSP58490.2023.10248772. [24] MA Shaopeng, XUE Wei, CHEN Kehui, et al. Radar vital signs detection method based on variational mode decomposition and wavelet transform[C]. 2021 China Automation Congress, Beijing, China, 2021: 7469–7474. doi: 10.1109/CAC53003.2021.9728129. [25] XIA Ziliang, WANG Xinhuai, WEI Hongbo, et al. Detection of vital signs based on variational mode decomposition using FMCW radar[C]. 2021 International Conference on Microwave and Millimeter Wave Technology, Nanjing, China, 2021: 1–3. doi: 10.1109/ICMMT52847.2021.9617967. [26] YANG Xuan, WANG Ziying, ZHANG Li, et al. A novel arc-chord approximation demodulation based on green’s theorem[C]. 2023 IEEE MTT-S International Wireless Symposium, Qingdao, China, 2023: 1–3. doi: 10.1109/IWS58240.2023.10222839. [27] LV Qinyi, CAO Congqi, and ZHOU Deyun. Wireless vital-sign detection based on improved arc-chord approximation demodulation[C]. 2022 IEEE MTT-S International Microwave Biomedical Conference, Suzhou, China, 2022: 57–59. doi: 10.1109/IMBioC52515.2022.9790242. [28] LV Qinyi, MIN Lingtong, CAO Congqi, et al. Time-domain Doppler biomotion detections immune to unavoidable DC offsets[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 8505010. doi: 10.1109/TIM.2021.3125096. [29] ZHANG Li, FU Changhong, ZHUANG Zhongxu, et al. Kalman filter and cross-multiply algorithm with adaptive DC offset removal[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 4002710. doi: 10.1109/TIM.2022.3147317. [30] CAO Zhiyuan, ZHANG Chengcheng, JIN Zirui, et al. A DC offset cancellation circuit using digital assistance technique and self-calibrating comparator for RF transceiver[C]. 2023 IEEE 15th International Conference on ASIC, Nanjing, China, 2023: 1–4. doi: 10.1109/ASICON58565.2023.10396145. [31] HAZRA S, FUSCO A, KIPRIT G N, et al. Robust radar-based vital sensing with adaptive sinc filtering and random body motion rejections[J]. IEEE Sensors Letters, 2023, 7(5): 7001604. doi: 10.1109/LSENS.2023.3266237. [32] TARIQ A and GHAFOURI-SHIRAZ H. Vital signs detection using Doppler radar and continuous wavelet transform[C]. 5th European Conference on Antennas and Propagation, Rome, Italy, 2011: 285–288. [33] ZHANGI T, VALERIO G, SARRAZIN J, et al. Wavelet-based analysis of 60 GHz Doppler radar for non-stationary vital sign monitoring[C]. 2017 11th European Conference on Antennas and Propagation, Paris, France, 2017: 1876–1877. doi: 10.23919/EuCAP.2017.7928689. [34] FU Yangye, SUN Lijuan, GUO Jian, et al. EEMD-MICA based heart rate extraction algorithm for radar signals[C]. 2023 35th Chinese Control and Decision Conference, Yichang, China, 2023: 1649–1655. doi: 10.1109/CCDC58219.2023.10327001. [35] INDU S, GUPTA A, KAW A, et al. Life detection system using continuous wave Doppler radar and blind source separation[C]. 2017 Devices for Integrated Circuit, Kalyani, India, 2017: 711–715. doi: 10.1109/DEVIC.2017.8074043. [36] LIU Heng, WANG Yong, ZHOU Mu, et al. Millimeter-wave radar vital signs detection based on modified independent component analysis[C]. 2023 IEEE 11th Asia-Pacific Conference on Antennas and Propagation, Guangzhou, China, 2023: 1–2. doi: 10.1109/APCAP59480.2023.10470254. [37] CHOWDHURY J H, SHIHAB M, PRAMANIK S K, et al. Separation of heartbeat waveforms of simultaneous two-subjects using independent component analysis and empirical mode decomposition[J]. IEEE Microwave and Wireless Technology Letters, 2024, 34(8): 1059–1062. doi: 10.1109/LMWT.2024.3420253. [38] HUANG C Y, FANG Guanwei, CHUANG H R, et al. Clutter-resistant vital sign detection using amplitude-based demodulation by EEMD-PCA-correlation algorithm for FMCW radar systems[C]. 2019 49th European Microwave Conference, Paris, France, 2019: 928–931. doi: 10.23919/EuMC.2019.8910730. [39] YU Xiaogang, LI Changzhi, and LIN J. Noise analysis for noncontact vital sign detectors[C]. 2010 IEEE 11th Annual Wireless and Microwave Technology Conference, Melbourne, USA, 2010: 1–4. doi: 10.1109/WAMICON.2010.5461889. [40] MARZO A, CORKETT T, and DRINKWATER B W. Ultraino: An open phased-array system for narrowband airborne ultrasound transmission[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2018, 65(1): 102–111. doi: 10.1109/TUFFC.2017.2769399. [41] MÄKINEN Y, AZZARI L, and FOI A. Collaborative filtering of correlated noise: Exact transform-domain variance for improved shrinkage and patch matching[J]. IEEE Transactions on Image Processing, 2020, 29: 8339–8354. doi: 10.1109/TIP.2020.3014721. [42] WANG Jingyu, WANG Xiang, ZHU Zhongbo, et al. 1-D microwave imaging of human cardiac motion: An ab-initio investigation[J]. IEEE Transactions on Microwave Theory and Techniques, 2013, 61(5): 2101–2107. doi: 10.1109/TMTT.2013.2252186. [43] YANG Xiufang, JIAO Zhen, and YANG Yankang. Researchon linear demodulation method of Doppler radar vital signal[C]. 2022 IEEE International Conference on Electrical Engineering, Big Data and Algorithms, Changchun, China, 2022: 1381–1385. doi: 10.1109/EEBDA53927.2022.9744892. [44] WANG Jingyu, WANG Xiang, CHEN Lei, et al. Noncontact distance and amplitude-independent vibration measurement based on an extended DACM algorithm[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(1): 145–153. doi: 10.1109/TIM.2013.2277530. -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

