
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
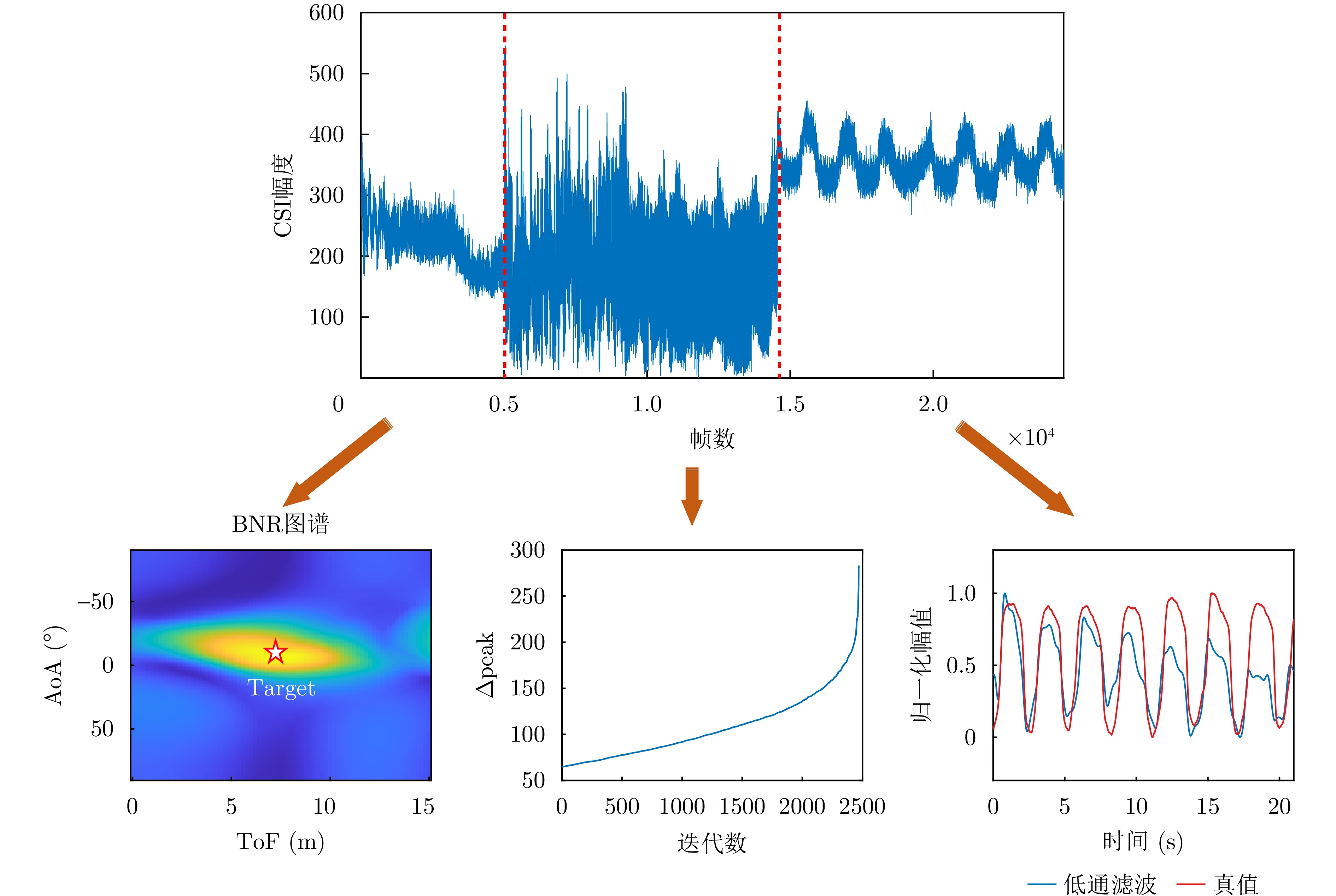
摘要: 2010年以来,基于商用WiFi设备实现非接触式呼吸监测得到了广泛关注。然而,现有的方法受人体反射信号强度制约,通常要求人正面朝向WiFi设备,当人体侧向或背部朝向设备时,胸腔反射信号的减弱使得呼吸监测变得困难。为了解决这个问题,该文提出了一种基于智能反射表面(IRS)的新型呼吸监测系统。该系统利用智能反射表面控制WiFi信号在环境中的传播路径,增强了人体的反射,最终实现了姿势鲁棒地呼吸监测。此外,该系统易于部署,无需事先知道收发天线与智能反射表面的确切位置和相应的环境信息。实验验证,与现有的方法相比,该系统显著改善了不同姿势下人体的呼吸监测效果。Abstract: Since 2010, the utilization of commercial WiFi devices for contact-free respiration monitoring has garnered significant attention. However, existing WiFi-based respiration detection methods are susceptible to constraints imposed by hardware limitations and require the person to directly face the WiFi device. Specifically, signal reflection from the thoracic cavity diminishes when the body is oriented sideways or with the back toward the device, leading to complexities in respiratory monitoring. To mitigate these hardware-associated limitations and enhance robustness, we leveraged the signal-amplifying potential of Intelligent Reflecting Surfaces (IRS) to establish a high-precision respiration detection system. This system capitalizes on IRS technology to manipulate signal propagation within the environment to enhance signal reflection from the body, finally achieving posture-resilient respiratory monitoring. Furthermore, the system can be easily deployed without the prior knowledge of antenna placement or environmental intricacies. Compared with conventional techniques, our experimental results validate that this system markedly enhances respiratory monitoring across various postural configurations in indoor environments.
-

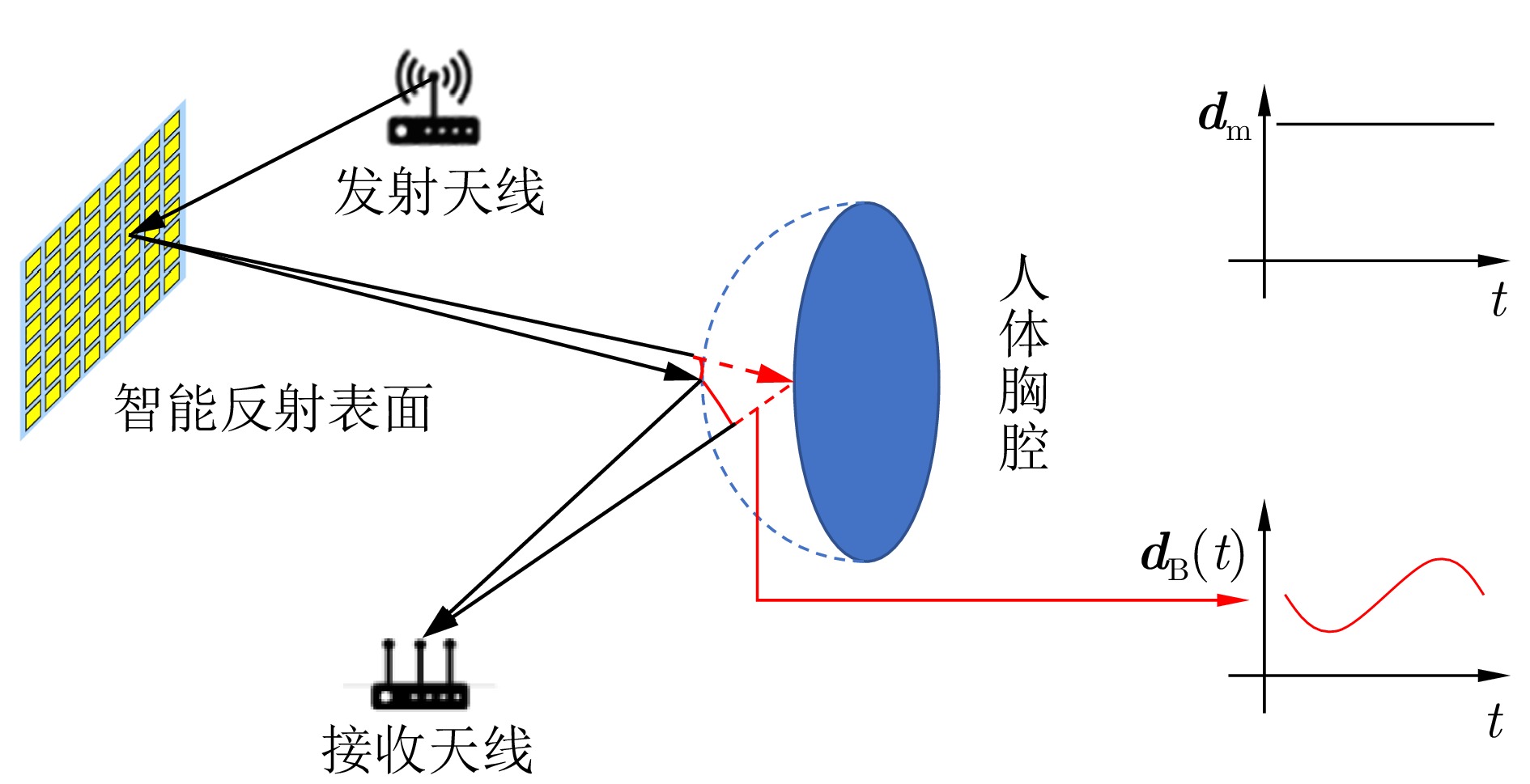
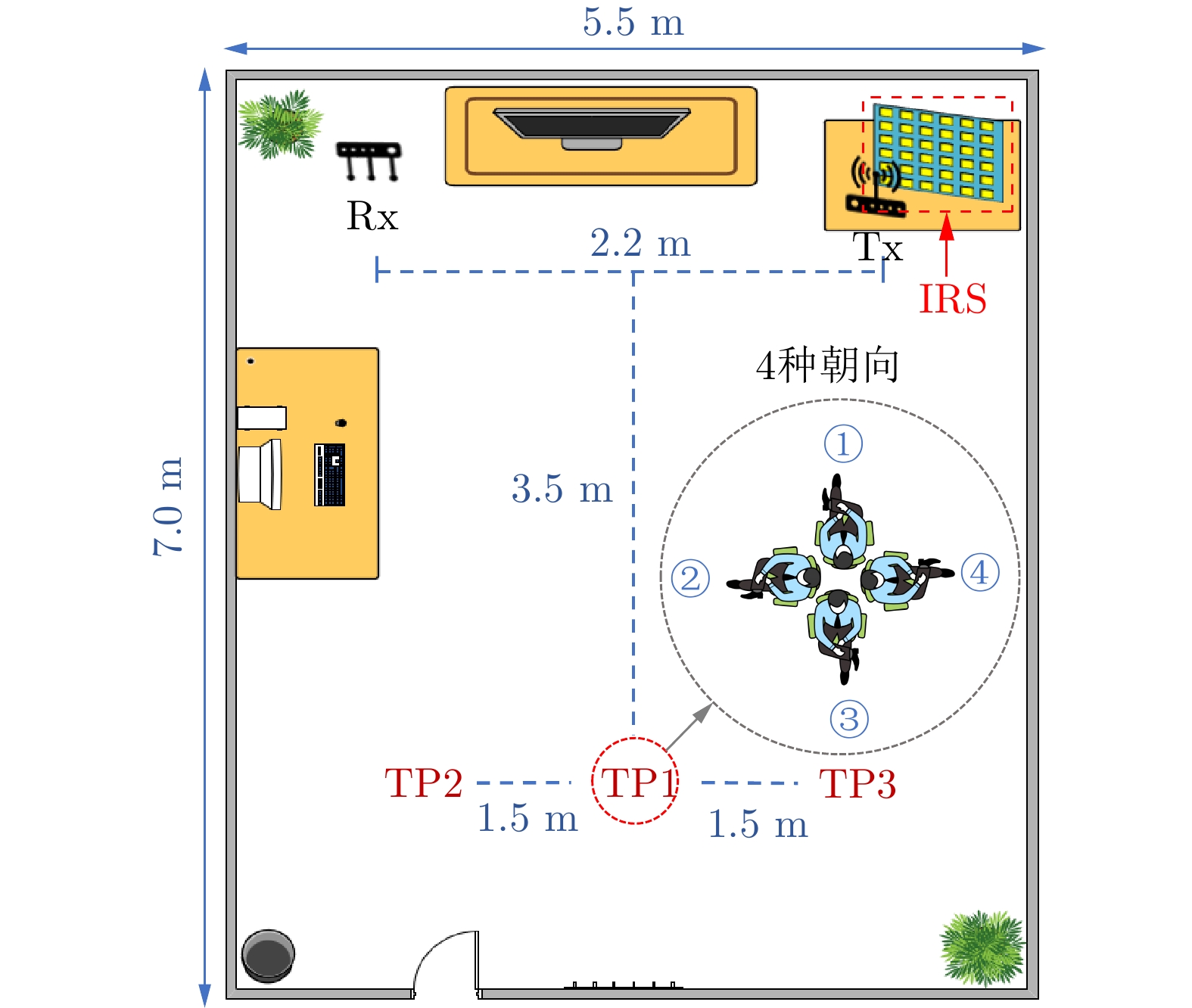
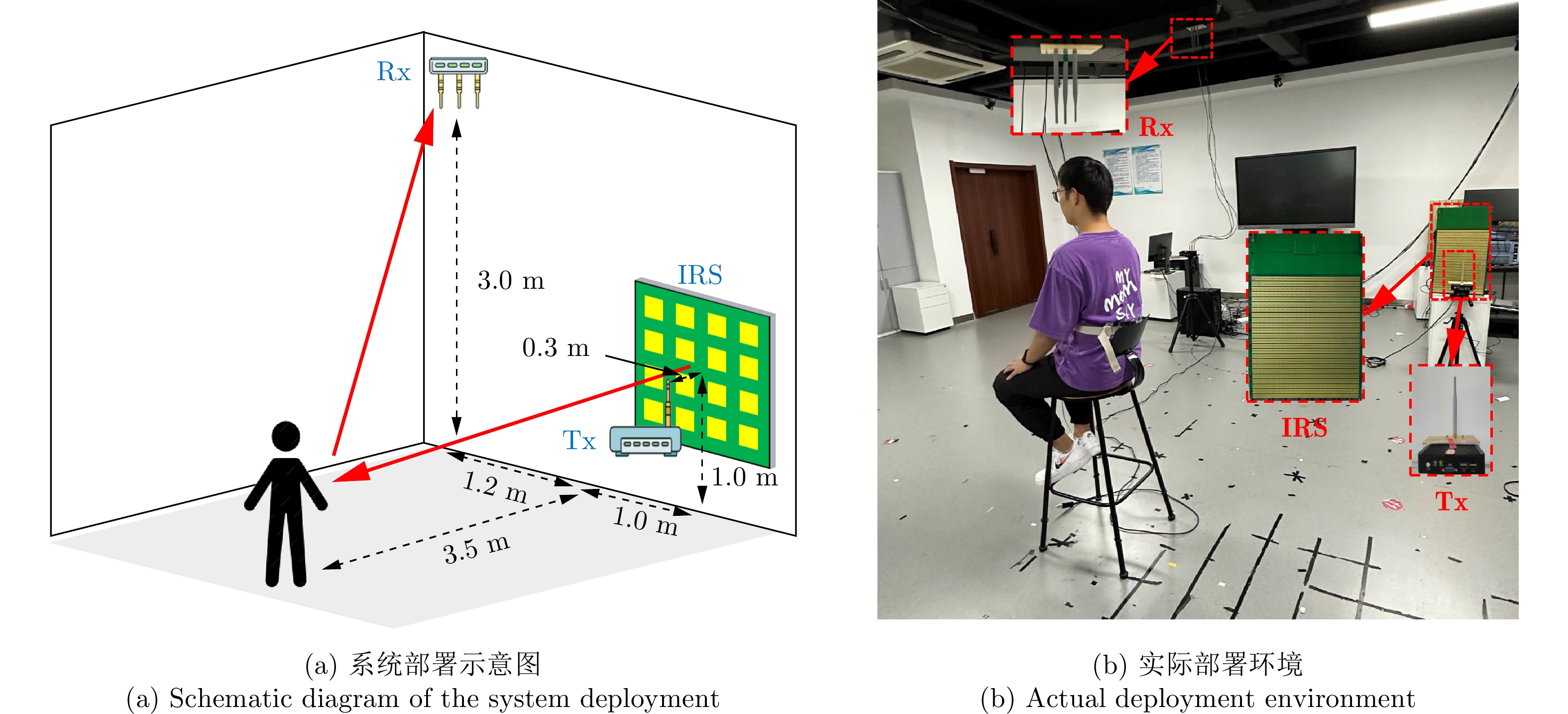
图 1 在室内基于智能反射表面辅助的呼吸感知部署场景
Figure 1. Deployment scenario of an indoor respiration sensing system assisted by IRS
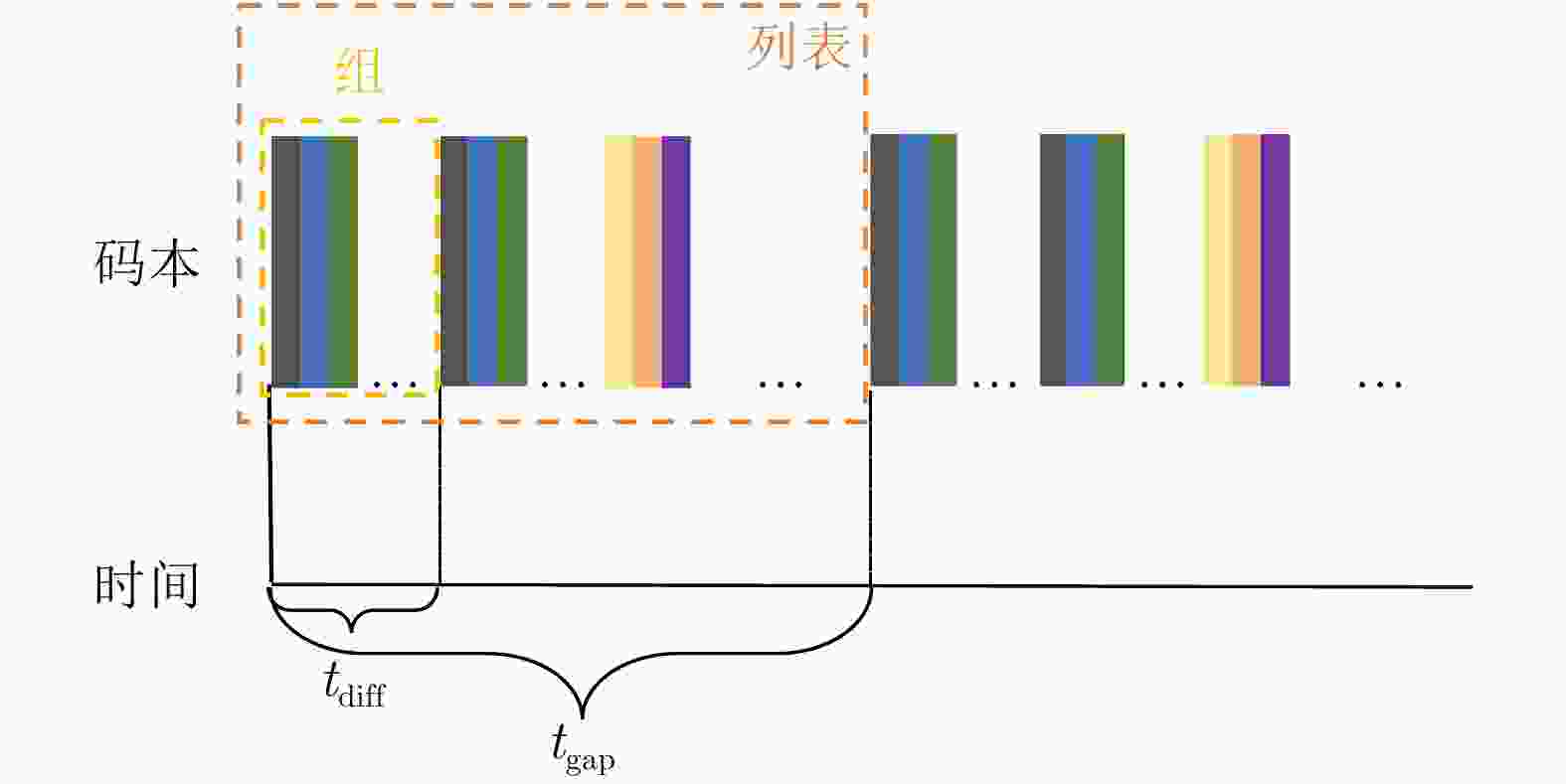
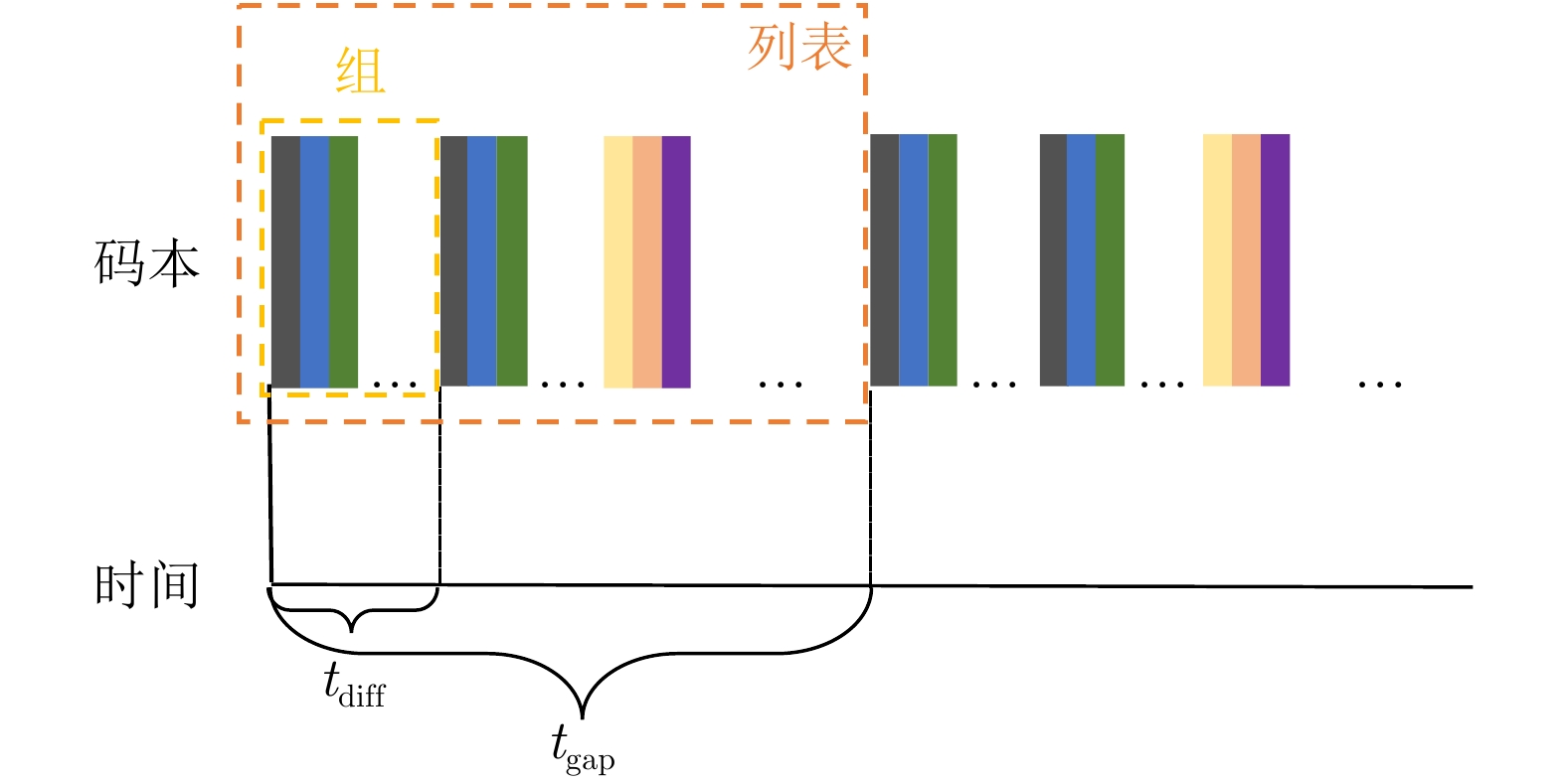
图 5 利用时分复用来评估码本(每种颜色代表一个智能反射表面码本)
Figure 5. We utilize time division to evaluate the codebooks (each color represents a codebook)
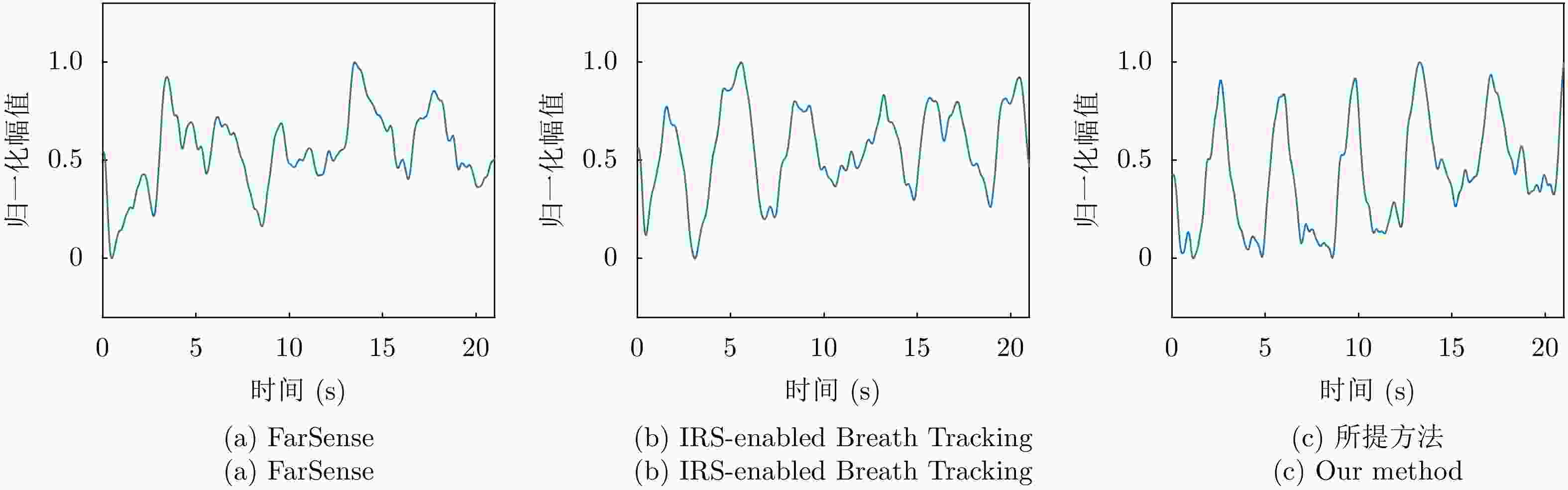
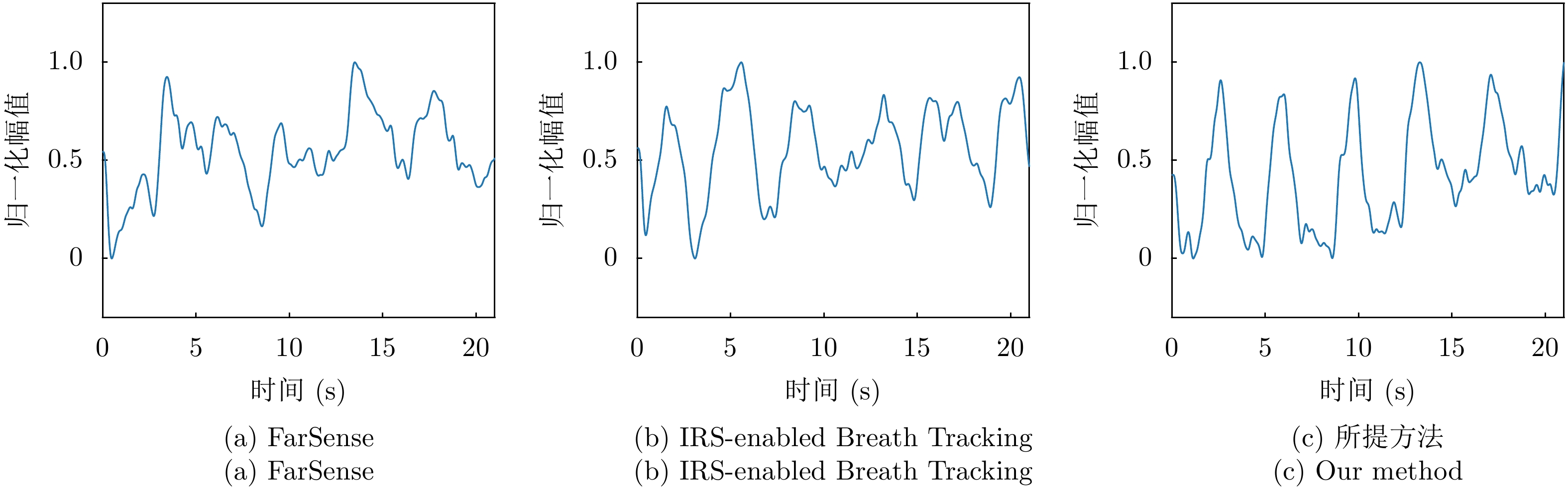
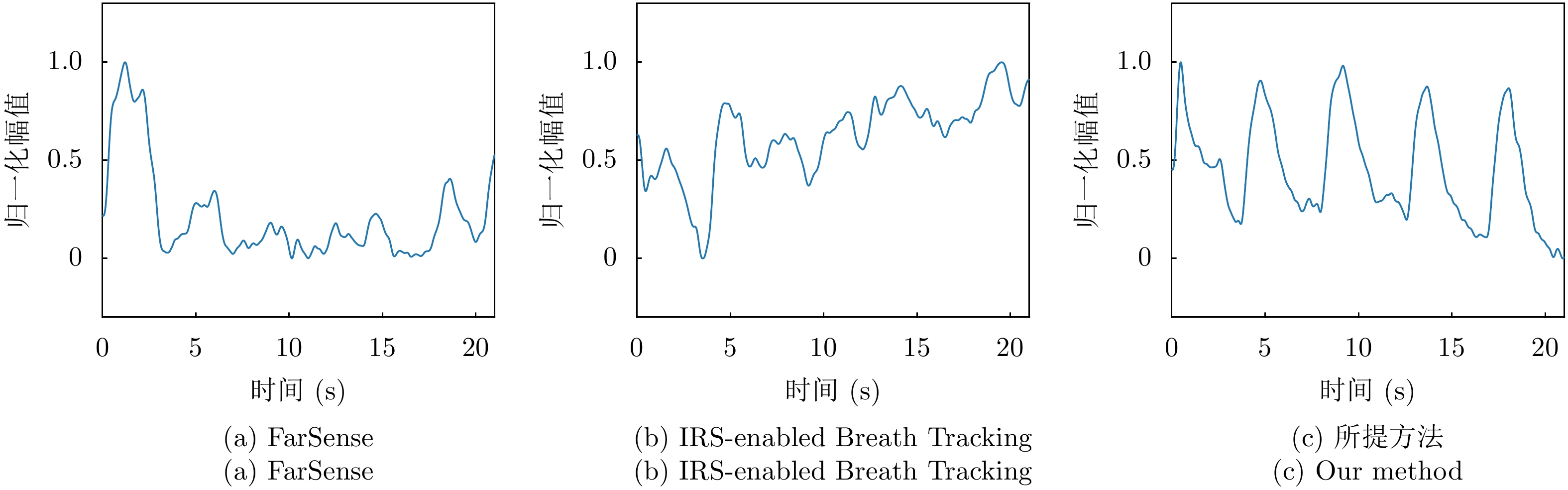
图 13 人体在TP2位置正对WiFi的检测结果
Figure 13. Different results when the target person at location TP2 faces the WiFi device
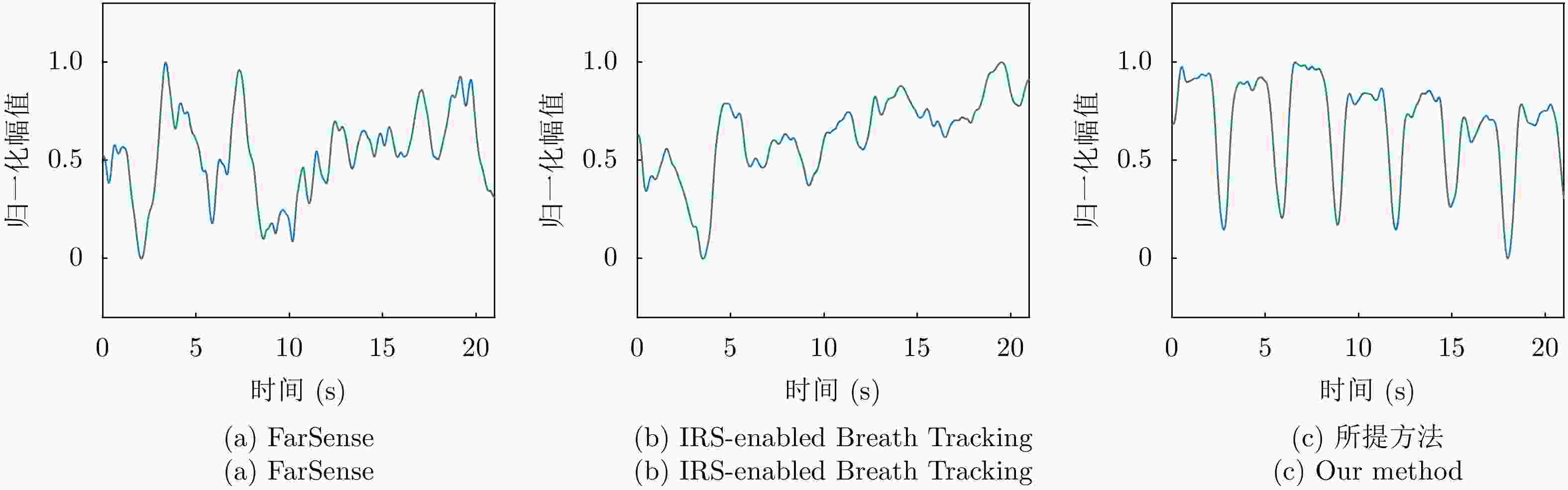
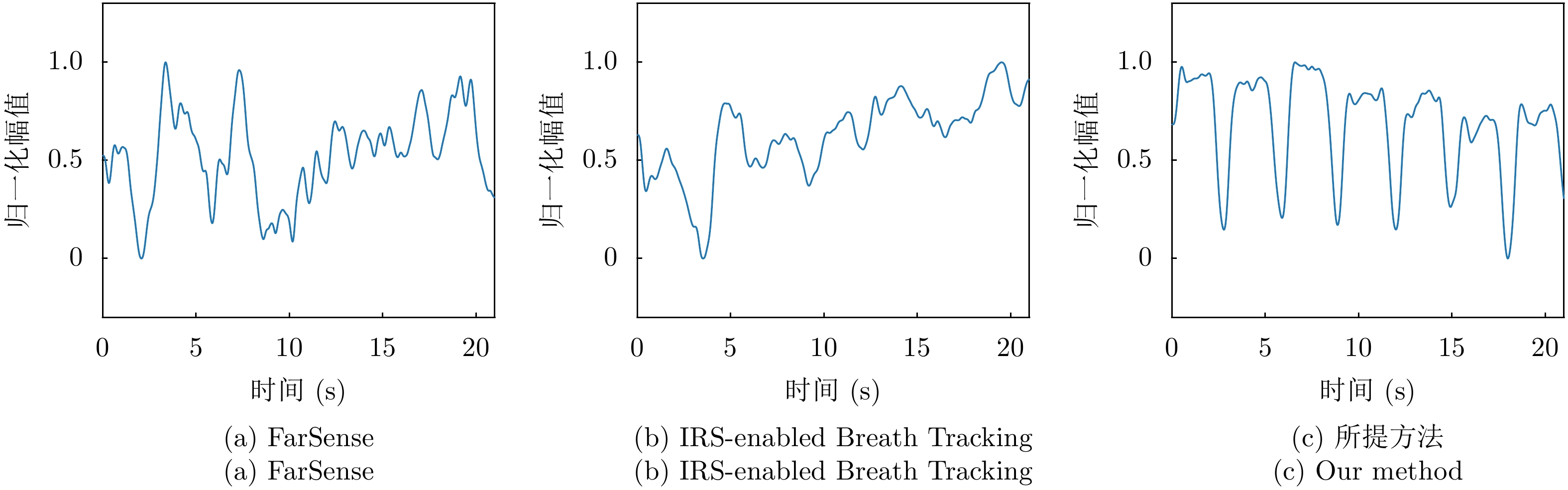
图 14 人体在TP2位置左侧对WiFi的检测结果
Figure 14. Different results when the target person at location TP2 left to the WiFi device
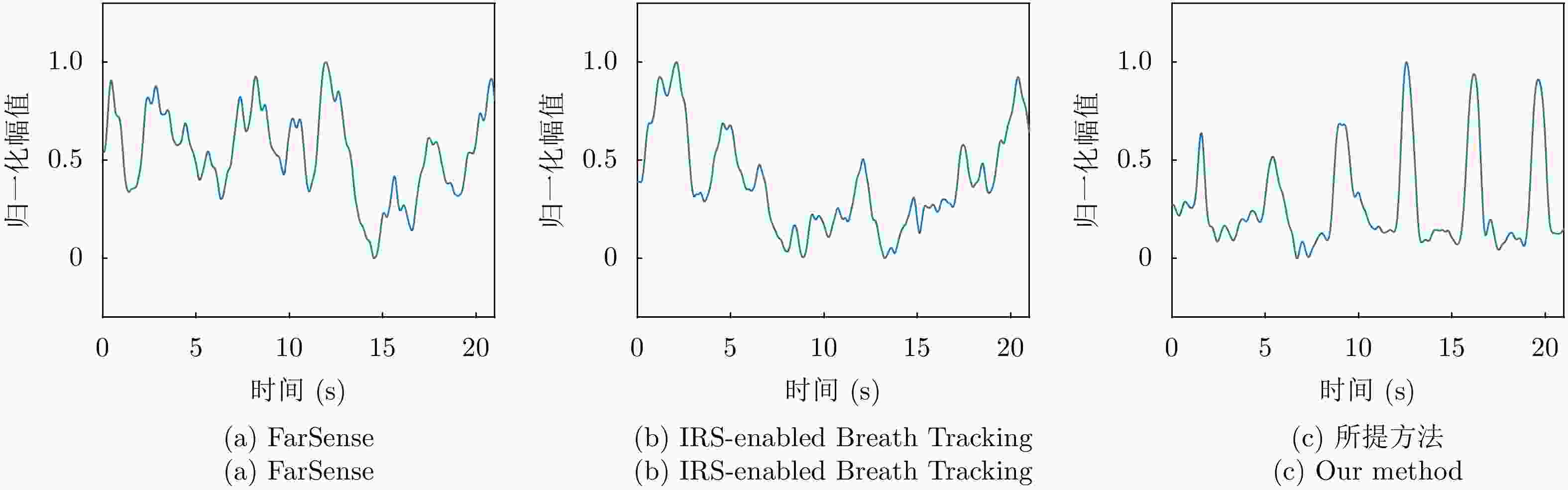
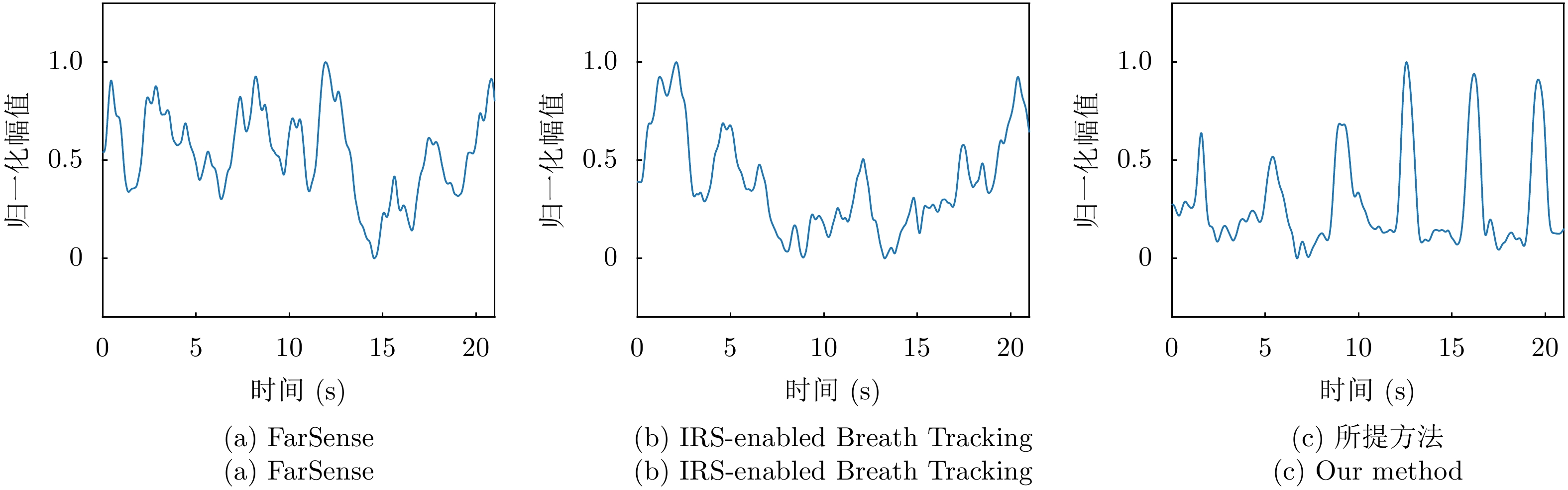
图 15 人体在TP2位置右侧对WiFi的检测结果
Figure 15. Different results when the target person at location TP2 right to the WiFi device

图 16 人体在TP1位置背对WiFi的检测结果
Figure 16. Different results when the target person at location TP1 backs to the WiFi device
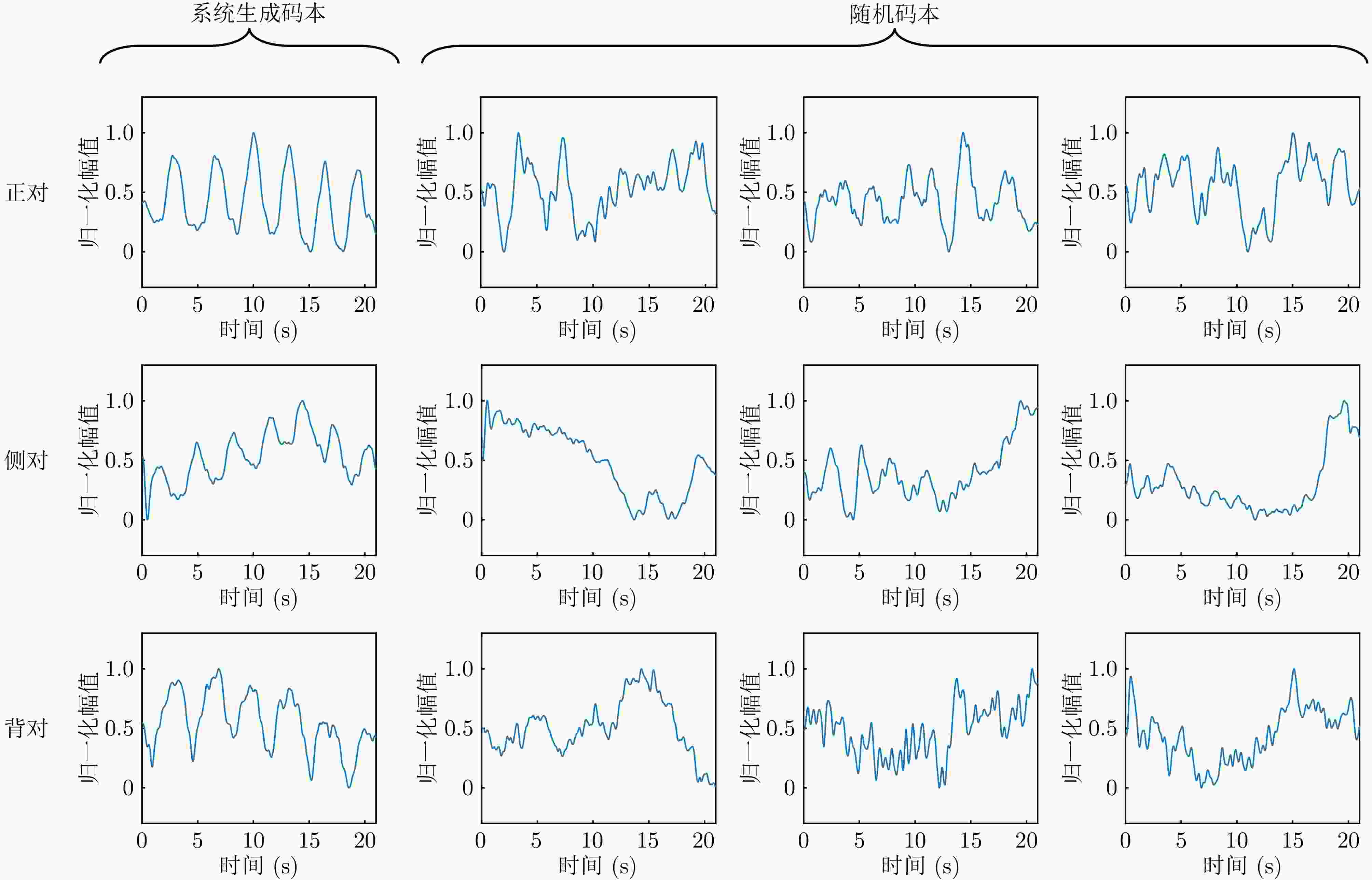
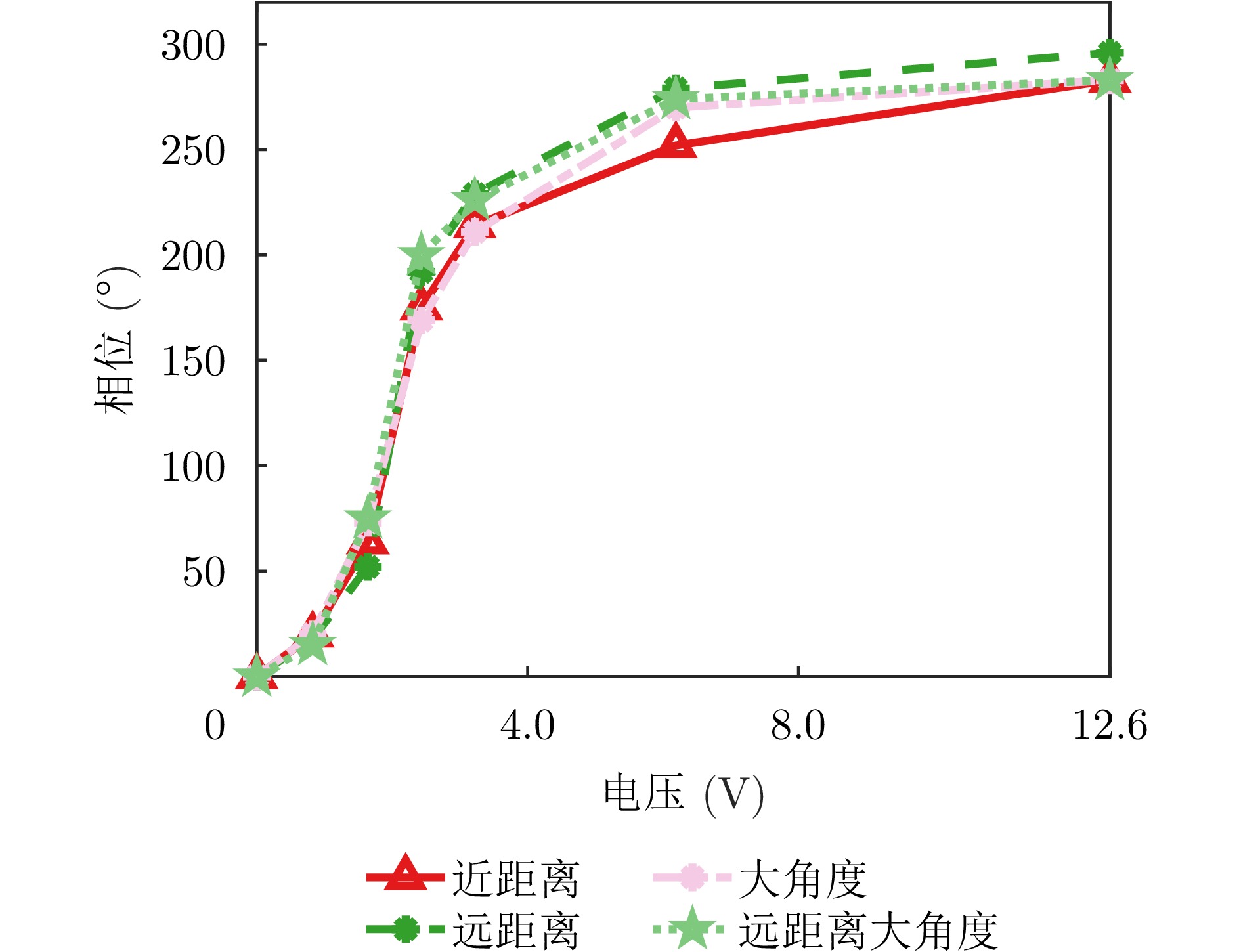
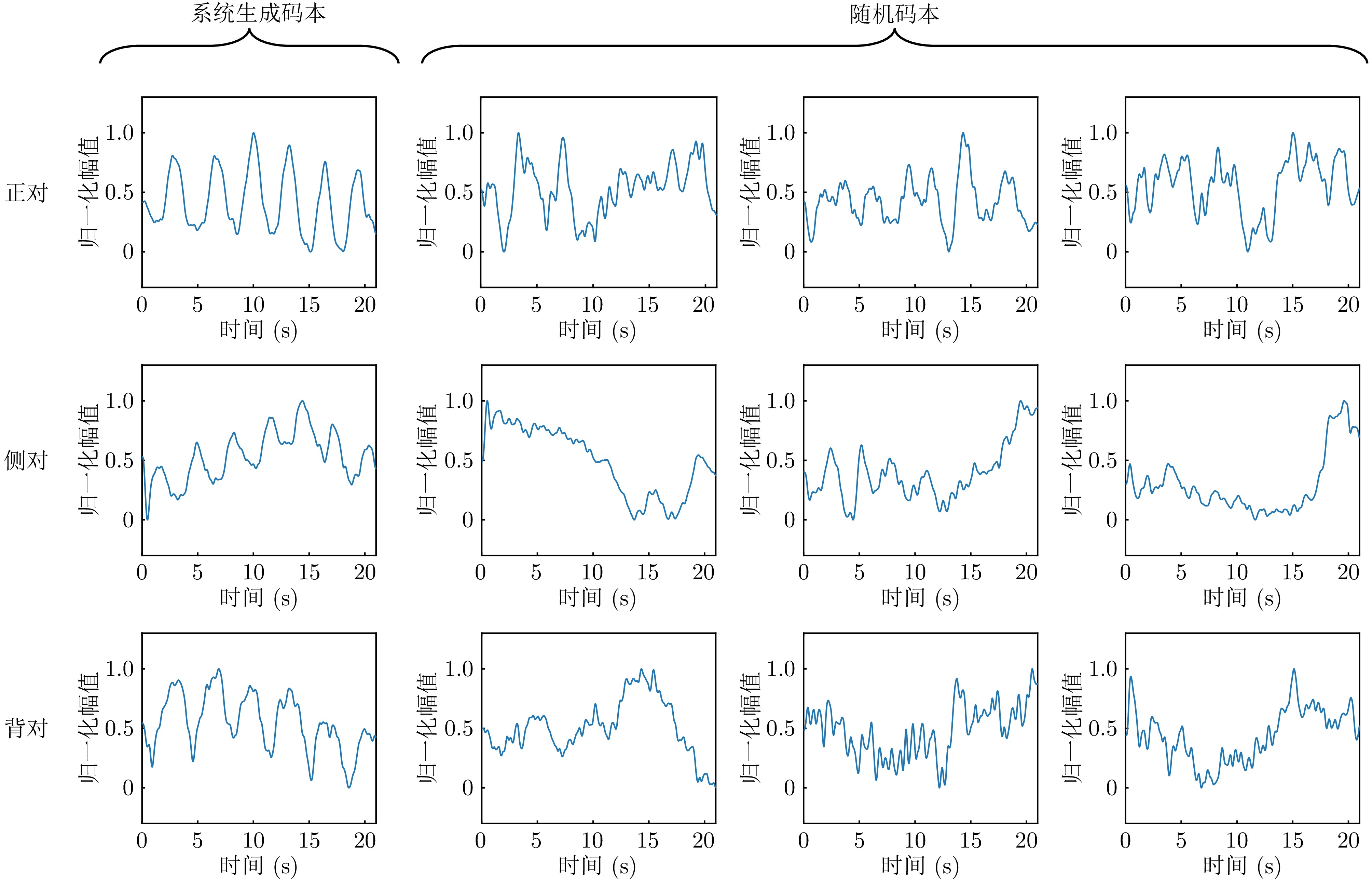
图 17 目标在距离检测设备4 m处,在系统生成码本和随机码本的实验结果
Figure 17. Results of the codebook generated by the proposed system and the random approach, with the target positioned 4 m away from the detection device
1 智能反射表面码本优化迭代算法
1. IRS codebook optimization iterative algorithm
输入:码本池容量L,码本维度$ {N}_{x} $, $ {N}_{y} $,循环阈值$ {\eta }_{{\mathrm{lowest}}} $,
列表长度$ {N}_{{\mathrm{list}}} $输出:最优智能反射表面码本 1: for k = 1 $\to $ L do 2: S[k,:,:] =threshold(random($ {N}_{x},{N}_{y} $), 0.5·ones($ {N}_{x},{N}_{y} $)) 3: end for 4: $ {{S}}_{{\mathrm{peak}}} $ = evaluateCodebook(S) 5: [$ {{S}}_{{\mathrm{peak}}} $,$ \mathrm{i}\mathrm{d} $] = sort($ {{S}}_{{\mathrm{peak}}} $) 6: $ {{S}}_{{\mathrm{pool}}} $=S($ \mathrm{i}\mathrm{d} $) 7: loopFlag = True 8: while loopFlag == True do 9: $ \delta $ = normalize($ {{S}}_{{\mathrm{peak}}} $) 10: $ {\boldsymbol{P}}_{\mathrm{n}\mathrm{e}\mathrm{w}}=\dfrac{2}{{L}^{2}+L}\displaystyle\sum _{i=1}^{L}{\delta }_{i}{\boldsymbol{p}}_{i} $ 11: for I = 1 $\to\; {N}_{{\mathrm{list}}} $ do 12: $ {{S}}_{{\mathrm{new}}} $[i,:,:] = threshold(random($ {N}_{x},{N}_{y} $),$ {\boldsymbol{P}}_{\mathrm{n}\mathrm{e}\mathrm{w}} $) 13: end for 14: $ {{\mathrm{peak}}}_{{\mathrm{new}}} $ = evaluateCodebook($ {{S}}_{{\mathrm{new}}} $) 15: $ {{\mathrm{id}}}_{{\mathrm{replace}}} $ = find($ {{\mathrm{peak}}}_{{\mathrm{new}}} $< $ {{S}}_{{\mathrm{peak}}} $) 16: $ \eta $ = size($ {{\mathrm{id}}}_{{\mathrm{replace}}} $)/$ {N}_{{\mathrm{list}}} $ 17: if $ \eta $ < $ {\eta }_{{\mathrm{lowest}}} $ then 18: loopFlag = Flase 19: end if 20: end while 21: ($ {{S}}_{{\mathrm{pool}}} $(1,:,:))  下载: 导出CSV
下载: 导出CSV
表 1 不同方位的呼吸频率估计的平均绝对误差(bpm)
Table 1. The MAE breath rate estimation with different orientations of human (bpm)
方法 正对 左侧对 右侧对 背对 FarSense 0.816 2.327 2.213 2.331 IRS-enabled Breath Tracking 0.706 1.892 1.957 2.101 所提方法 0.664 0.753 0.681 0.787
下载: 导出CSV
表 2 不同受试者的呼吸频率估计的平均绝对误差(bpm)
Table 2. The MAE breath rate estimation in different people (bpm)
方法 受试者1 受试者2 受试者3 FarSense 2.188 1.656 1.767 IRS-enabled Breath Tracking 1.192 1.407 1.404 所提方法 0.657 0.706 0.654
下载: 导出CSV
-
[1] 方震, 简璞, 张浩, 等. 基于FMCW雷达的非接触式医疗健康监测技术综述[J]. 雷达学报, 2022, 11(3): 499–516. doi: 10.12000/JR22019.FANG Zhen, JIAN Pu, ZHANG Hao, et al. Review of noncontact medical and health monitoring technologies based on FMCW radar[J]. Journal of Radars, 2022, 11(3): 499–516. doi: 10.12000/JR22019. [2] HUFF A, KARLEN-AMARANTE M, PITTS T, et al. Optogenetic stimulation of pre-Bötzinger complex reveals novel circuit interactions in swallowing-breathing coordination[J]. Proceedings of the National Academy of Sciences of the United States of America, 2022, 119(29): e2121095119. doi: 10.1073/pnas.2121095119. [3] MEHRA R, CHUNG M K, OLSHANSKY B, et al. Sleep-disordered breathing and cardiac arrhythmias in adults: Mechanistic insights and clinical implications: A scientific statement from the American Heart Association[J]. Circulation, 2022, 146(9): e119–e136. doi: 10.1161/CIR.0000000000001082. [4] VAN RUITEN C C, SMITS M M, KOK M D, et al. Mechanisms underlying the blood pressure lowering effects of dapagliflozin, exenatide, and their combination in people with type 2 diabetes: A secondary analysis of a randomized trial[J]. Cardiovascular Diabetology, 2022, 21(1): 63. doi: 10.1186/S12933-022-01492-X. [5] LIN Yunan, NOBLE E, LOH C H, et al. Respiration monitoring using a motion tape chest band and portable wireless sensing node[J]. Journal of Commercial Biotechnology, 2022, 27(1). doi: 10.5912/jcb1026. [6] LI Chengyu, XU Zijie, XU Shuxing, et al. Miniaturized retractable thin-film sensor for wearable multifunctional respiratory monitoring[J]. Nano Research, 2023, 16(9): 11846–11854. doi: 10.1007/s12274-023-5420-1. [7] MOLINARO N, SCHENA E, SILVESTRI S, et al. Multi-roi spectral approach for the continuous remote cardio-respiratory monitoring from mobile device built-in cameras[J]. Sensors, 2022, 22(7): 2539. doi: 10.3390/s22072539. [8] WANG Haowen, HUANG Jia, WANG Guowei, et al. Surveillance camera-based cardio-respiratory monitoring for critical patients in icu[C]. 2022 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Ioannina, Greece, 2022: 1–4. doi: 10.1109/BHI56158.2022.9926954. [9] LIM C, KIM J, KIM J, et al. Estimation of respiratory rate in various environments using microphones embedded in face masks[J]. The Journal of Supercomputing, 2022, 78(17): 19228–19245. doi: 10.1007/s11227-022-04622-0. [10] GONG Hanqin, ZHANG Dongheng, CHEN Jinbo, et al. Enabling orientation-free mmwave-based vital sign sensing with multi-domain signal analysis[C]. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Korea, 2024: 8751–8755. doi: 10.1109/ICASSP48485.2024.10448323. [11] ZHAI Qian, HAN Xiangyu, HAN Yi, et al. A contactless on-bed radar system for human respiration monitoring[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 4004210. doi: 10.1109/TIM.2022.3164145. [12] KREJ M, BARAN P, and DZIUDA Ł. Detection of respiratory rate using a classifier of waves in the signal from a FBG-based vital signs sensor[J]. Computer Methods and Programs in Biomedicine, 2019, 177: 31–38. doi: 10.1016/j.cmpb.2019.05.014. [13] JANUSZ M, ROUDJANE M, MANTOVANI D, et al. Detecting respiratory rate using flexible multimaterial fiber electrodes designed for a wearable garment[J]. IEEE Sensors Journal, 2022, 22(13): 13552–13561. doi: 10.1109/JSEN.2022.3175645. [14] XIE Xuecheng, ZHANG Dongheng, LI Yadong, et al. Robust WiFi respiration sensing in the presence of interfering individual[J]. IEEE Transactions on Mobile Computing, 2024, 23(8): 8447–8462. doi: 10.1109/TMC.2023.3348879. [15] ZHANG Binbin, ZHANG Dongheng, LI Yadong, et al. Unsupervised domain adaptation for RF-based gesture recognition[J]. IEEE Internet of Things Journal, 2023, 10(23): 21026–21038. doi: 10.1109/JIOT.2023.3284496. [16] HE Ying, CHEN Yan, HU Yang, et al. WiFi vision: Sensing, recognition, and detection with commodity MIMO-OFDM WiFi[J]. IEEE Internet of Things Journal, 2020, 7(9): 8296–8317. doi: 10.1109/JIOT.2020.2989426. [17] WANG Xuyu, YANG Chao, and MAO Shiwen. PhaseBeat: Exploiting CSI phase data for vital sign monitoring with commodity WiFi devices[C]. 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, USA, 2017: 1230–1239. doi: 10.1109/ICDCS.2017.206. [18] ZHANG Dongheng, HU Yang, CHEN Yan, et al. BreathTrack: Tracking indoor human breath status via commodity WiFi[J]. IEEE Internet of Things Journal, 2019, 6(2): 3899–3911. doi: 10.1109/JIOT.2019.2893330. [19] WANG W H, ZENG Xaolu, WANG Beibei, et al. Improved wifi-based respiration tracking via contrast enhancement[C]. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 2023: 1–2. doi: 10.1109/ICASSP49357.2023.10094823. [20] ZENG Youwei, WU Dan, XIONG Jie, et al. FarSense: Pushing the range limit of WiFi-based respiration sensing with CSI ratio of two antennas[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2019, 3(3): 121. doi: 10.1145/3351279. [21] 李廉林, 崔铁军. 智能电磁感知的若干进展[J]. 雷达学报, 2021, 10(2): 183–190. doi: 10.12000/JR21049.LI Lianlin and CUI Tiejun. Recent progress in intelligent electromagnetic sensing[J]. Journal of Radars, 2021, 10(2): 183–190. doi: 10.12000/JR21049. [22] ZHANG Ganlin, ZHANG Dongheng, HE Ying, et al. Multi-person passive WiFi indoor localization with intelligent reflecting surface[J]. IEEE Transactions on Wireless Communications, 2023, 22(10): 6534–6546. doi: 10.1109/TWC.2023.3244369. [23] 田团伟, 邓浩, 鲁建华, 等. 智能反射面辅助雷达通信双功能系统的多载波波形优化方法[J]. 雷达学报, 2022, 11(2): 240–254. doi: 10.12000/JR21138.TIAN Tuanwei, DENG Hao, LU Jianhua, et al. Multicarrier waveform optimization method for an intelligent reflecting surface-assisted dual-function radar-communication system[J]. Journal of Radars, 2022, 11(2): 240–254. doi: 10.12000/JR21138. [24] ZHANG Lei, CHEN Xiaoqing, LIU Shuo, et al. Space-time-coding digital metasurfaces[J]. Nature Communications, 2018, 9(1): 4334. doi: 10.1038/s41467-018-06802-0. [25] HE Ying, ZHANG Dongheng, and CHEN Yan. High-resolution wifi imaging with reconfigurable intelligent surfaces[J]. IEEE Internet of Things Journal, 2023, 10(2): 1775–1786. doi: 10.1109/JIOT.2022.3210686. [26] 蒋卫祥, 田翰闱, 宋超, 等. 数字编码超表面: 迈向电磁功能的可编程与智能调控[J]. 雷达学报, 2022, 11(6): 1003–1019. doi: 10.12000/JR22167.JIANG Weixiang, TIAN Hanwei, SONG Chao, et al. Digital coding metasurfaces: Toward programmable and smart manipulations of electromagnetic functions[J]. Journal of Radars, 2022, 11(6): 1003–1019. doi: 10.12000/JR22167. [27] XIA Dexiao, GUAN Lei, LIU Haixia, et al. MetaBreath: Multitarget respiration detection based on space-time-coding digital metasurface[J]. IEEE Transactions on Microwave Theory and Techniques, 2024, 72(2): 1433–1443. doi: 10.1109/TMTT.2023.3297413. [28] LI Zhi, JIN Tian, GUAN Dongfang, et al. MetaPhys: Contactless physiological sensing of multiple subjects using RIS-based 4-D radar[J]. IEEE Internet of Things Journal, 2023, 10(14): 12616–12626. doi: 10.1109/JIOT.2023.3252587. [29] TEWES S, HEINRICHS M, KRONBERGER R, et al. IRS-enabled breath tracking with colocated commodity WiFi transceivers[J]. IEEE Internet of Things Journal, 2023, 10(8): 6870–6886. doi: 10.1109/JIOT.2022.3228158. [30] ZHANG Dongheng, HU Yang, CHEN Yan, et al. Calibrating phase offsets for commodity WiFi[J]. IEEE Systems Journal, 2020, 14(1): 661–664. doi: 10.1109/JSYST.2019.2904714. [31] CHEN Yan, SU Xiang, HU Yang, et al. Residual carrier frequency offset estimation and compensation for commodity WiFi[J]. IEEE Transactions on Mobile Computing, 2020, 19(12): 2891–2902. doi: 10.1109/TMC.2019.2934106. [32] CHEN Yan, DENG Hongyu, ZHANG Dongheng, et al. SpeedNet: Indoor speed estimation with radio signals[J]. IEEE Internet of Things Journal, 2021, 8(4): 2762–2774. doi: 10.1109/JIOT.2020.3022071. [33] HAN Yi, CHEN Yan, WANG Beibei, et al. Enabling heterogeneous connectivity in internet of things: A time-reversal approach[J]. IEEE Internet of Things Journal, 2016, 3(6): 1036–1047. doi: 10.1109/JIOT.2016.2548659. [34] XU Qinyi, CHEN Yan, WANG Beibei, et al. TRIEDS: Wireless events detection through the wall[J]. IEEE Internet of Things Journal, 2017, 4(3): 723–735. doi: 10.1109/JIOT.2017.2663318. [35] ZHANG Tianyu, ZHANG Dongheng, WANG Guanzhong, et al. RLoc: Towards robust indoor localization by quantifying uncertainty[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2023, 7(4): 200. doi: 10.1145/3631437. [36] REA M, FAKHREDDINE A, GIUSTINIANO D, et al. Filtering noisy 802.11 time-of-flight ranging measurements from commoditized wifi radios[J]. IEEE/ACM Transactions on Networking, 2017, 25(4): 2514–2527. doi: 10.1109/TNET.2017.2700430. [37] XIE Yaxiong, XIONG Jie, LI Mo, et al. mD-track: Leveraging multi-dimensionality for passive indoor Wi-Fi tracking[C]. The 25th Annual International Conference on Mobile Computing and Networking, Los Cabos, Mexico, 2019: 8. doi: 10.1145/3300061.3300133. [38] YUE Shichao, HE Hao, WANG Hao, et al. Extracting multi-person respiration from entangled RF signals[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2018, 2(2): 86. doi: 10.1145/3214289. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

