
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Analysis of the Influence of Distributed Interrupted-sampling Repeating Signals on Airborne Interferometer Parameter Measurements
-
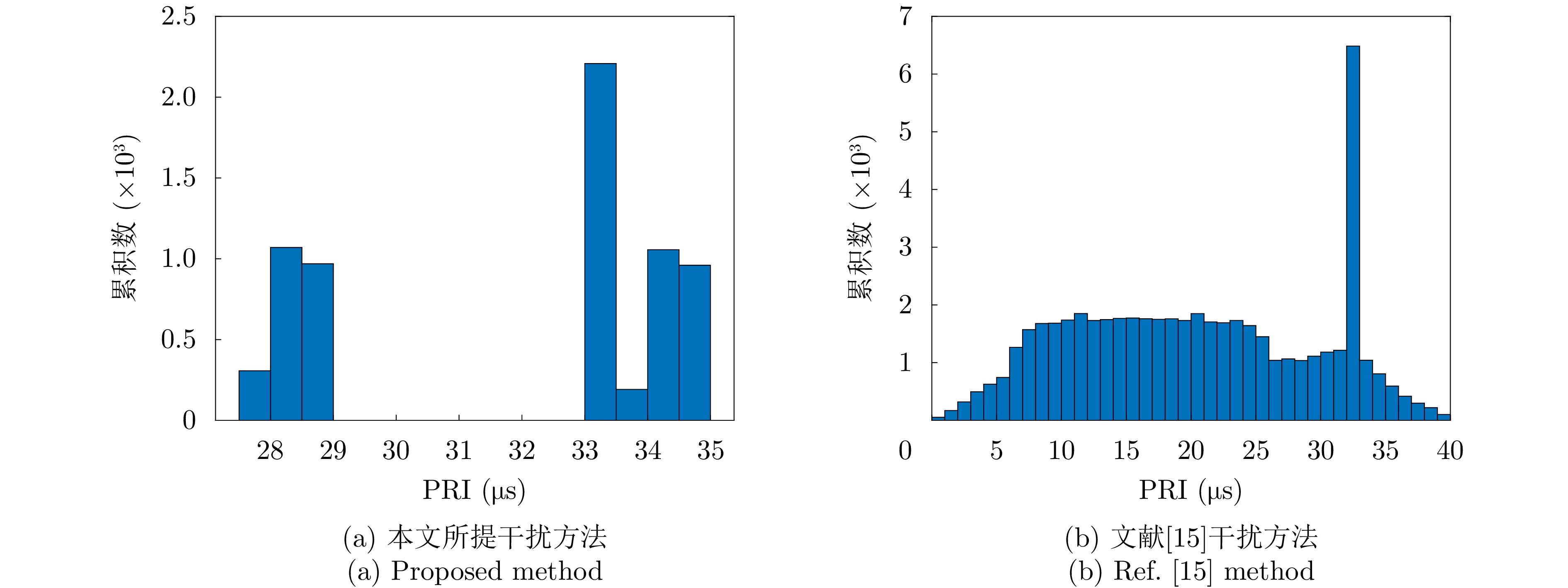
摘要: 针对反机载干涉仪侦察场景,该文提出一种基于间歇采样转发技术生成分布式信号对干涉仪参数测量施加干扰的方法。辐射源与转发干扰机分布部署构成干扰系统,转发干扰机对辐射源脉冲信号进行间歇采样并向干涉仪转发,转发信号与辐射源信号准同步到达干涉仪,实现对干涉仪空域参数和时域参数的同时干扰。对于机载干涉仪运动过程中与干扰系统发生的位置关系变化,给出信号准同步约束并构建分布式信号叠加模型。然后针对干涉仪体制对脉冲空域和时域参数的测量机理,分析分布式信号实施干扰的原理,并分析信号参数对干扰效果的影响,进而提出分布式信号设计原则。仿真实验和暗室实验结果表明,该文所提出分布式波形可有效扰乱干涉仪对信号到达方位角、脉宽和脉冲重复周期等空时域参数的正确测量。Abstract: In the context of counter-reconnaissance against airborne interferometers, this study proposes a jamming method designed to disrupt the parameter measurement capabilities of interferometers by generating distributed signals based on an interrupted-sampling repeating technique. An emitter and a transmitting jammer are combined to form a distributed jamming system. The transmitting jammer samples the emitter signal and transmits the repeating signal to an interferometer. A quasi-synchronization constraint is established according to the change in the positional relation between the airborne interferometer and the jamming system. Additionally, a model for the superposition of distributed signals is provided. Then, the mathematical principle underlying distributed signal jamming is expounded according to the pulse spatial and temporal parameter measurement using the interferometer system. Moreover, the influence of various signal parameters on the jamming effect is analyzed to propose a principle for distributed signal design. Simulation and darkroom experiments show that the proposed method can effectively disrupt the accurate measurement of the pulse spatial domain and time domain parameters, such as azimuth-of-arrival, pulse width, and repetition interval.
-
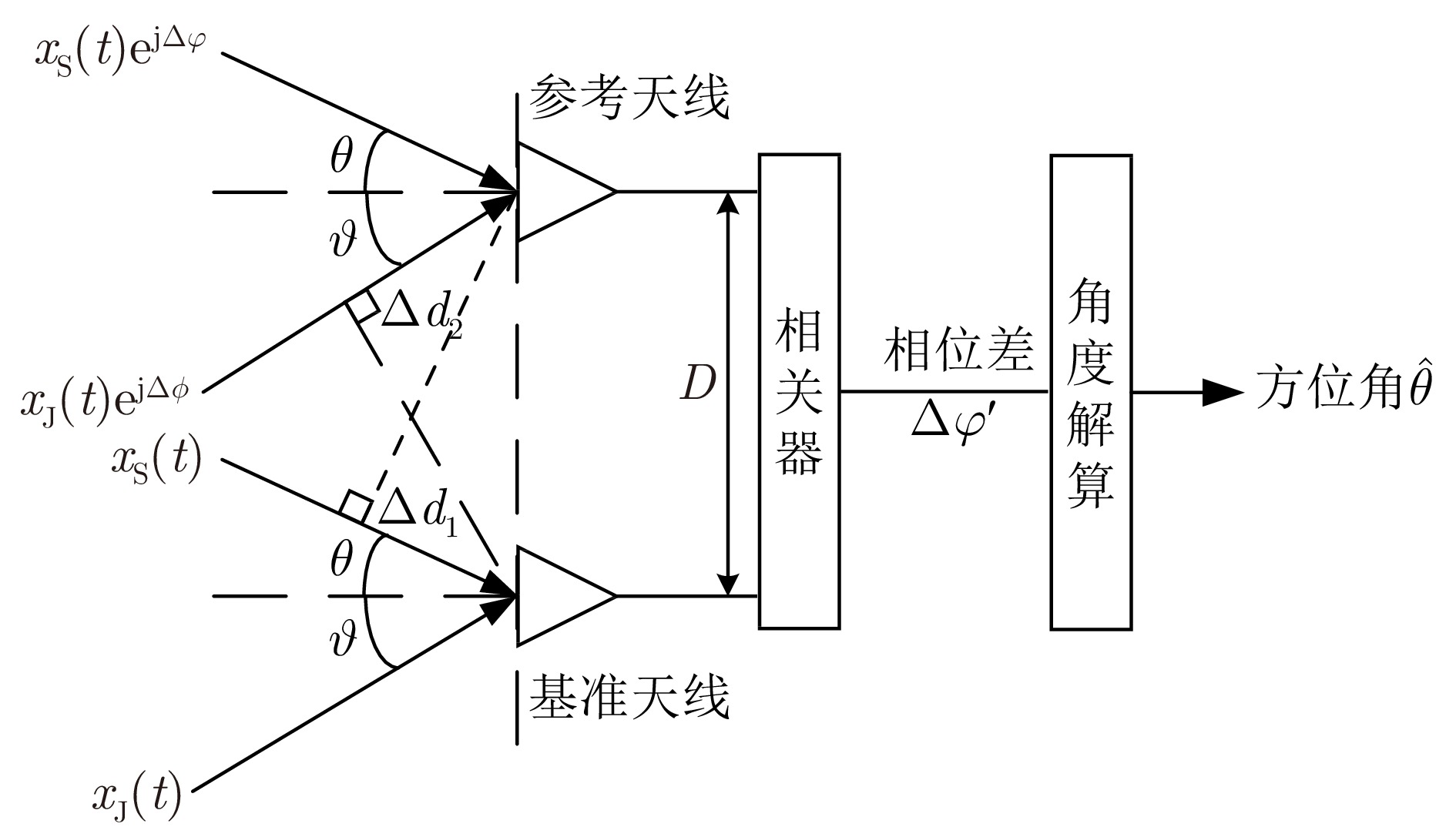
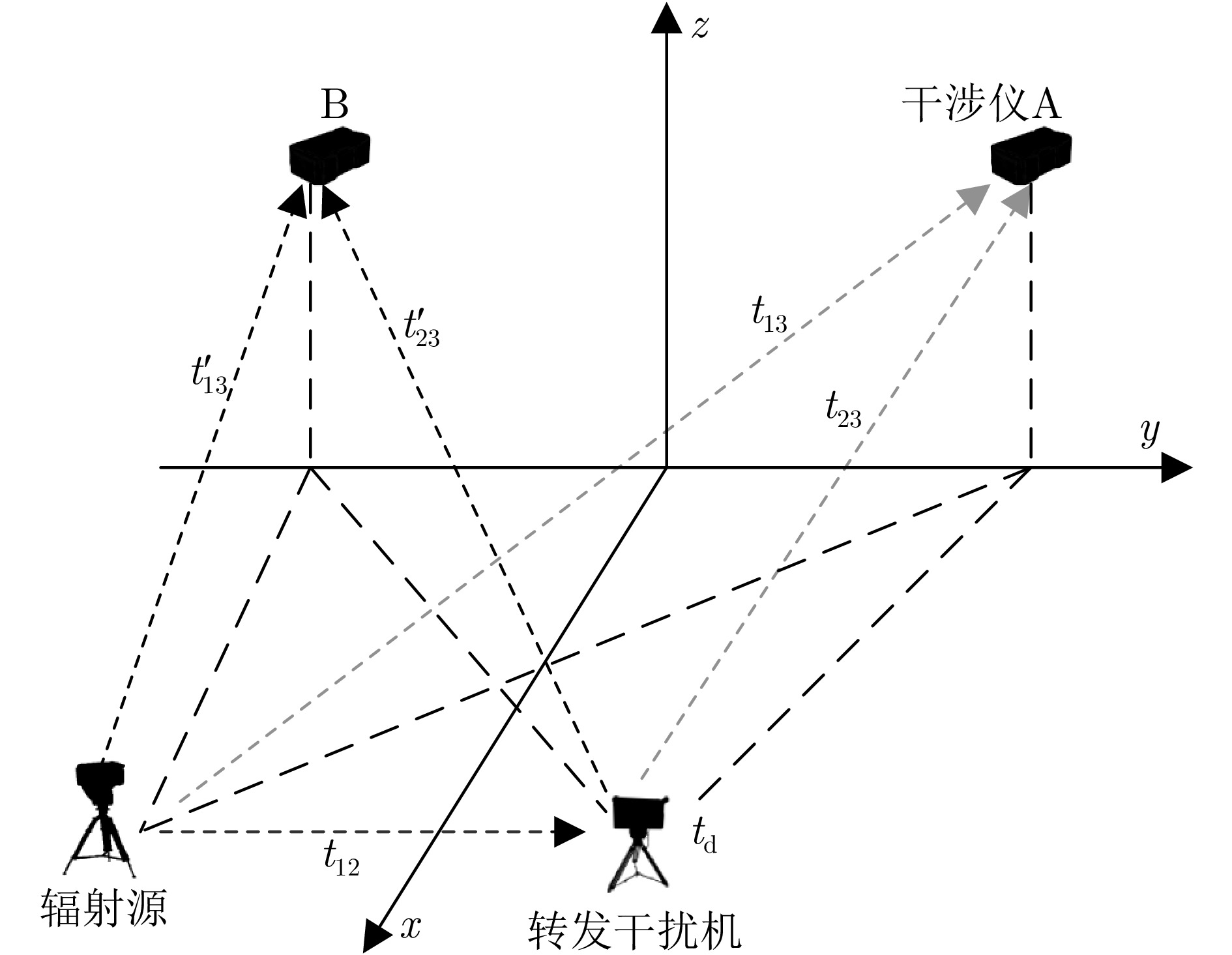
图 1 干涉仪运动过程中辐射源和转发干扰机信号传播路径变化
Figure 1. Changes of the signal propagation path of radiation source and jammer during interferometer movement
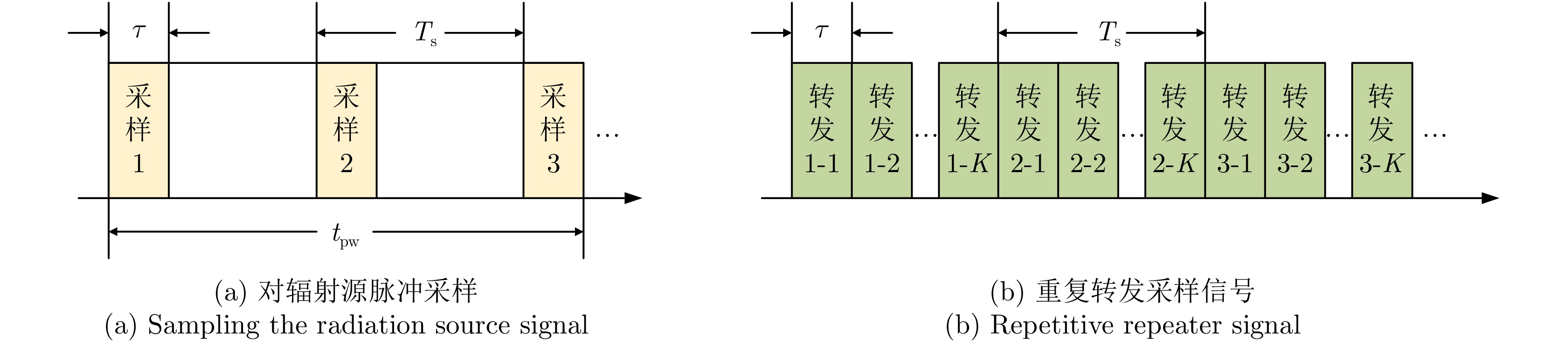
图 3 间歇采样重复转发示意图
Figure 3. Schematic of interrupted-sampling repetitive repeater jamming
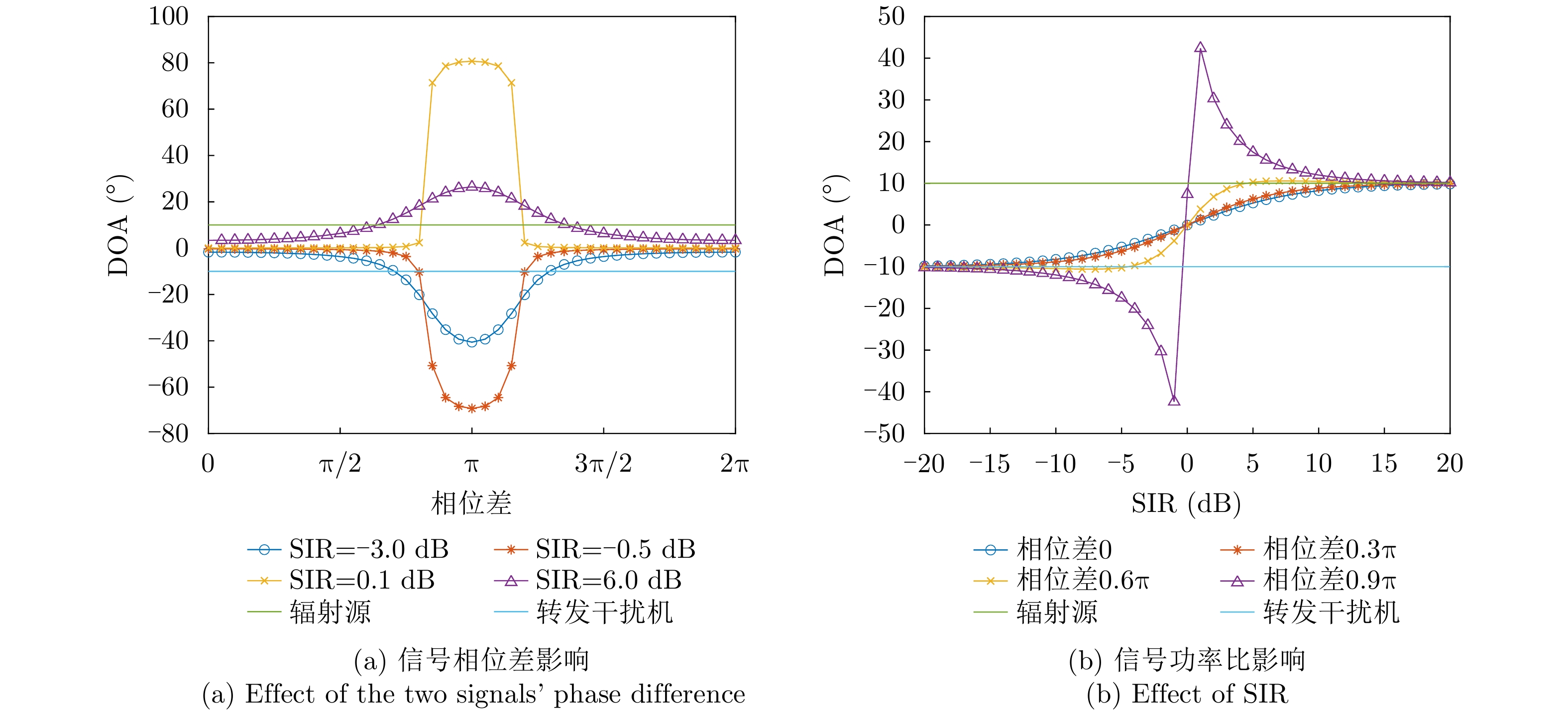
图 5 信号相位差、功率比对角度测量影响分析
Figure 5. Analysis of phase difference and SIR between two signals
表 1 辐射源参数
Table 1. Parameters of the radiation source
参数 数值 发射功率(kW) 200 工作频率(GHz) 10 码片宽度(μs) 0.1 码片个数 64 脉宽(μs) 6.4 重复周期(μs) 32  下载: 导出CSV
下载: 导出CSV
表 2 转发干扰机参数
Table 2. Parameters of the transmitter
参数 数值 发射功率(kW) 150 采样长度(μs) 0.8 重复转发次数 2 采样次数 4
下载: 导出CSV
表 3 干涉仪对不同信号测量结果
Table 3. Results of different signals measured by the interferometer
信号 幅度(dBm) 到达方位角(°) 脉宽(μs) 单脉冲 统计值 单脉冲 统计值 单脉冲 统计值 仅辐射源信号 –76.4600 –75.7 39.5862 39.5 4.94691 5.0 – 76.0225 39.9849 4.94691 – 75.7725 39.8660 4.94691 – 75.7725 39.4743 5.06692 – 75.7725 39.2365 5.01358 仅转发信号 –72.4600 –72.5 – 22.5355 –22.5 9.96050 10.0 – 72.6475 – 22.6194 10.02720 –72.4600 – 22.5985 10.01380 –72.3350 – 23.0321 9.97383 –72.3350 – 22.6684 10.00050 合成信号1 – 68.6475 –68.7 29.1440 29.0 10.3472 10.0 – 68.6475 29.2559 10.2805 – 68.7725 29.2419 10.3205 – 68.6475 29.5427 10.2538 –68.8350 29.3608 10.0672 合成信号2 – 70.3975 –70.0 27.4095 27.0 10.4139 10.0 –70.3350 26.3464 10.1472 –70.2100 27.1926 10.1338 –70.3350 26.8919 10.0538 –69.9600 27.1507 10.0938
下载: 导出CSV
-
[1] 谭华有. 电子侦察装备概述[J]. 无线电工程, 1993(2): 55–61.TAN Huayou. Overview of electronic reconnaissance equipment[J]. Radio Engineering of China, 1993(2): 55–61. [2] 韩建立, 杨荣芳, 沈吉明, 等. 机载雷达侦察的情报分析与处理[J]. 海军航空工程学院学报, 2002, 17(3): 364–366. doi: 10.3969/j.issn.1673-1522.2002.03.019.HAN Jianli, YANG Rongfang, SHEN Jiming, et al. The intelligence analysis and disposal of airborne radar reconnaissance[J]. Journal of Naval Aeronautical Engineering Institute, 2002, 17(3): 364–366. doi: 10.3969/j.issn.1673-1522.2002.03.019. [3] 顾敏剑. 多波束比幅测向系统精度分析[J]. 舰船电子对抗, 2007, 30(3): 70–73. doi: 10.3969/j.issn.1673-9167.2007.03.020.GU Minjian. Accuracy analysis on multi-beam amplitude-comparison direction finding system[J]. Shipboard Electronic Countermeasure, 2007, 30(3): 70–73. doi: 10.3969/j.issn.1673-9167.2007.03.020. [4] 袁孝康. 相位干涉仪测向定位研究[J]. 上海航天, 1999(3): 3–9.YUAN Xiaokang. Study on direction-finding and position with phase interferometers[J]. Aerospace Shanghai, 1999(3): 3–9. [5] 陈旗, 黄高明, 宋士琼, 等. 基于空间谱估计的测向技术[J]. 火力与指挥控制, 2010, 35(8): 41–44. doi: 10.3969/j.issn.1002-0640.2010.08.011.CHEN Qi, HUANG Gaoming, SONG Shiqiong, et al. Research on direction finding based on spatial spectrum estimation[J]. Fire Control & Command Control, 2010, 35(8): 41–44. doi: 10.3969/j.issn.1002-0640.2010.08.011. [6] 刘治甬, 徐海洋. 基于数字波束形成侦察技术研究[J]. 现代信息科技, 2020, 4(15): 70–72, 75. doi: 10.19850/j.cnki.2096-4706.2020.15.022.LIU Zhiyong and XU Haiyang. Research on reconnaissance technology based on digital beamforming[J]. Modern Information Technology, 2020, 4(15): 70–72, 75. doi: 10.19850/j.cnki.2096-4706.2020.15.022. [7] 于周吉. 电子侦察设备整机设计与发展趋势探究[J]. 舰船电子对抗, 2021, 44(5): 6–11. doi: 10.16426/j.cnki.jcdzdk.2021.05.002.YU Zhouji. Research into machine design and development trend of electronic reconnaissance equipment[J]. Shipboard Electronic Countermeasure, 2021, 44(5): 6–11. doi: 10.16426/j.cnki.jcdzdk.2021.05.002. [8] 隋金坪, 刘振, 刘丽, 等. 雷达辐射源信号分选研究进展[J]. 雷达学报, 2022, 11(3): 418–433. doi: 10.12000/JR21147.SUI Jinping, LIU Zhen, LIU Li, et al. Progress in radar emitter signal deinterleaving[J]. Journal of Radars, 2022, 11(3): 418–433. doi: 10.12000/JR21147. [9] MARDIA H K. New techniques for the deinterleaving of repetitive sequences[J]. IEE Proceedings F (Radar and Signal Processing), 1989, 136(4): 149–154. doi: 10.1049/ip-f-2.1989.0025. [10] MILOJEVIĆ D J and POPOVIC B M. Improved algorithm for the deinterleaving of radar pulses[J]. IEE Proceedings F (Radar and Signal Processing), 1992, 139(1): 98–104. doi: 10.1049/ip-f-2.1992.0012. [11] 陈涛, 王天航, 郭立民. 基于PRI变换的雷达脉冲序列搜索方法[J]. 系统工程与电子技术, 2017, 39(6): 1261–1267. doi: 10.3969/j.issn.1001-506X.2017.06.12.CHEN Tao, WANG Tianhang, and GUO Limin. Sequence searching methods of radar signal pulses based on PRI transform algorithm[J]. Systems Engineering and Electronics, 2017, 39(6): 1261–1267. doi: 10.3969/j.issn.1001-506X.2017.06.12. [12] 蒋平虎, 苏萍贞, 赵乾海. 一种针对干涉仪测向系统的反电子侦察技术方法探讨[J]. 中国电子科学研究院学报, 2019, 14(5): 488–491. doi: 10.3969/j.issn.1673-5692.2019.05.009.JIANG Pinghu, SU Pingzhen, and ZHAO Qianhai. Discussion on an anti-electronic reconnaissance technique for interferometer direction-finding system[J]. Journal of CAEIT, 2019, 14(5): 488–491. doi: 10.3969/j.issn.1673-5692.2019.05.009. [13] 郑坤, 汪兵. 同时同频多源信号对干涉仪测角的影响分析[J]. 电子信息对抗技术, 2018, 33(6): 1–5. doi: 10.3969/j.issn.1674-2230.2018.06.001.ZHENG Kun and WANG Bing. Influences analysis on interferometer direction-finding of simultaneous multiple source signals under common-frequency[J]. Electronic Information Warfare Technology, 2018, 33(6): 1–5. doi: 10.3969/j.issn.1674-2230.2018.06.001. [14] 张保群. 一种抗SDIF分选的脉冲重复间隔参差设计方法[J]. 兵器装备工程学报, 2016, 37(9): 87–91, 114. doi: 10.11809/scbgxb2016.09.021.ZHANG Baoqun. A design method of PRI stagger countering the SDIF sorting algorithm[J]. Journal of Ordnance Equipment Engineering, 2016, 37(9): 87–91, 114. doi: 10.11809/scbgxb2016.09.021. [15] 徐梁昊, 姜秋喜, 潘继飞, 等. 一种抗重频分选的反侦察方法[J]. 四川兵工学报, 2015, 36(7): 117–120. doi: 10.11809/scbgxb2015.07.030.XU Lianghao, JIANG Qiuxi, PAN Jifei, et al. Method of counter reconnaissance based on PRI sorting algorithm[J]. Journal of Sichuan Ordnance, 2015, 36(7): 117–120. doi: 10.11809/scbgxb2015.07.030. [16] 曾涛, 殷丕磊, 杨小鹏, 等. 分布式全相参雷达系统时间与相位同步方案研究[J]. 雷达学报, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104.ZENG Tao, YIN Pilei, YANG Xiaopeng, et al. Time and phase synchronization for distributed aperture coherent radar[J]. Journal of Radars, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104. [17] 刘晓瑜, 王彤, 吴建新, 等. 基于MIMO直达波的无人机分布式相参雷达相位同步方法[J]. 系统工程与电子技术, 2020, 42(5): 1014–1025. doi: 10.3969/j.issn.1001-506X.2020.05.07.LIU Xiaoyu, WANG Tong, WU Jianxin, et al. Phase synchronization method based on MIMO direct path wave for UAV distributed coherent aperture radar[J]. Systems Engineering and Electronics, 2020, 42(5): 1014–1025. doi: 10.3969/j.issn.1001-506X.2020.05.07. [18] 王雪松, 刘建成, 张文明, 等. 间歇采样转发干扰的数学原理[J]. 中国科学: E辑, 2006, 36(8): 891–901. DOI: 10.3969/j.issn.1674-7259.2006.08.007.WANG Xuesong, LIU Jiancheng, ZHANG Wenming, et al. Mathematic principles of interrupted-sampling repeater jamming (ISRJ)[J]. Science in China Series F: Information Sciences, 2007, 50(1): 113–123. DOI: 10.3969/j.issn.1674-7259.2006.08.007. [19] 刘巧玲, 刘忠, 傅其祥, 等. 基于DRFM的间歇采样转发干扰系统设计与实现[J]. 雷达与对抗, 2007(3): 20–24. doi: 10.19341/j.cnki.issn.1009-0401.2007.03.006.LIU Qiaoling, LIU Zhong, FU Qixiang, et al. A DRFM-based repeater jammer with interrupted sampling[J]. Radar & ECM, 2007(3): 20–24. doi: 10.19341/j.cnki.issn.1009-0401.2007.03.006. [20] 刘忠. 基于DRFM的线性调频脉冲压缩雷达干扰新技术[D]. [博士论文], 国防科学技术大学, 2006: 75–84.LIU Zhong. Jamming technique for countering LFM pulse compression radar based on digital radio frequency memory[D]. [Ph.D. dissertation], National University of Defense Technology, 2006: 75–84. [21] CHEN Wenwu, CAI Zhengyu, CHEN Rushan, et al. Optimizing polyphase sequences for Orthogonal netted radar systems[J]. Journal of Systems Engineering and Electronics, 2012, 23(4): 529–535. doi: 10.1109/JSEE.2012.00067. [22] JIA Jinwei, LIU Limin, and HAN Zhuangzhi. Anti-sorting signal design applied to radio frequency stealth radar based on pulse repetition interval slide[C]. 2022 IEEE 4th International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 2022: 453–457. DOI: 10.1109/icpics55264.2022.9873748. -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

