
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Multiband FMCW Radar LSS-target Detection Dataset (LSS-FMCWR-1.0) and High-resolution Micromotion Feature Extraction Method
-
摘要: 无人机等低慢小目标探测对雷达目标检测和识别技术提出了很高的挑战,迫切需要构建相关数据集,支撑低慢小探测技术的发展和应用。该文公开了一个多波段调频连续波(FMCW)雷达低慢小目标探测数据集,基于Ku波段和L波段的FMCW雷达采集6种类型的无人机回波数据,通过雷达调制周期和调制带宽,具备不同时域和频域分辨和测量能力,构建了多波段FMCW雷达低慢小探测数据集(LSS-FMCWR-1.0)。为了进一步提升无人机微动特征提取能力,该文提出基于局部极大值同步提取变换的无人机微动提取和参数估计方法,在短时傅里叶变换的基础上提取时频能量最大值,保留有用信号分量,实现精细化时频表示。基于LSS-FMCWR-1.0进行验证分析,结果表明该方法相较于传统时频方法,熵值平均降低了5.3 dB,旋翼叶长估计误差降低了27.7%,所提方法兼顾高时频分辨率和较高的参数估计精度,为后续目标识别奠定了基础。
-
关键词:
- 低慢小目标 /
- 调频连续波雷达 /
- 微动特性 /
- 局部极大值同步提取变换 /
- 公开数据集
Abstract: Detection of small, slow-moving targets, such as drones using Unmanned Aerial Vehicles (UAVs) poses considerable challenges to radar target detection and recognition technology. There is an urgent need to establish relevant datasets to support the development and application of techniques for detecting small, slow-moving targets. This paper presents a dataset for detecting low-speed and small-size targets using a multiband Frequency Modulated Continuous Wave (FMCW) radar. The dataset utilizes Ku-band and L-band FMCW radar to collect echo data from six UAV types and exhibits diverse temporal and frequency domain resolutions and measurement capabilities by modulating radar cycles and bandwidth, generating an LSS-FMCWR-1.0 dataset (Low Slow Small, LSS). To further enhance the capability for extracting micro-Doppler features from UAVs, this paper proposes a method for UAV micro-Doppler extraction and parameter estimation based on the local maximum synchroextracting transform. Based on the Short Time Fourier Transform (STFT), this method extracts values at the maximum energy point in the time-frequency domain to retain useful signals and refine the time-frequency energy representation. Validation and analysis using the LSS-FMCWR-1.0 dataset demonstrate that this approach reduces entropy on an average by 5.3 dB and decreases estimation errors in rotor blade length by 27.7% compared with traditional time-frequency methods. Moreover, the proposed method provides the foundation for subsequent target recognition efforts because it balances high time-frequency resolution and parameter estimation capabilities. -
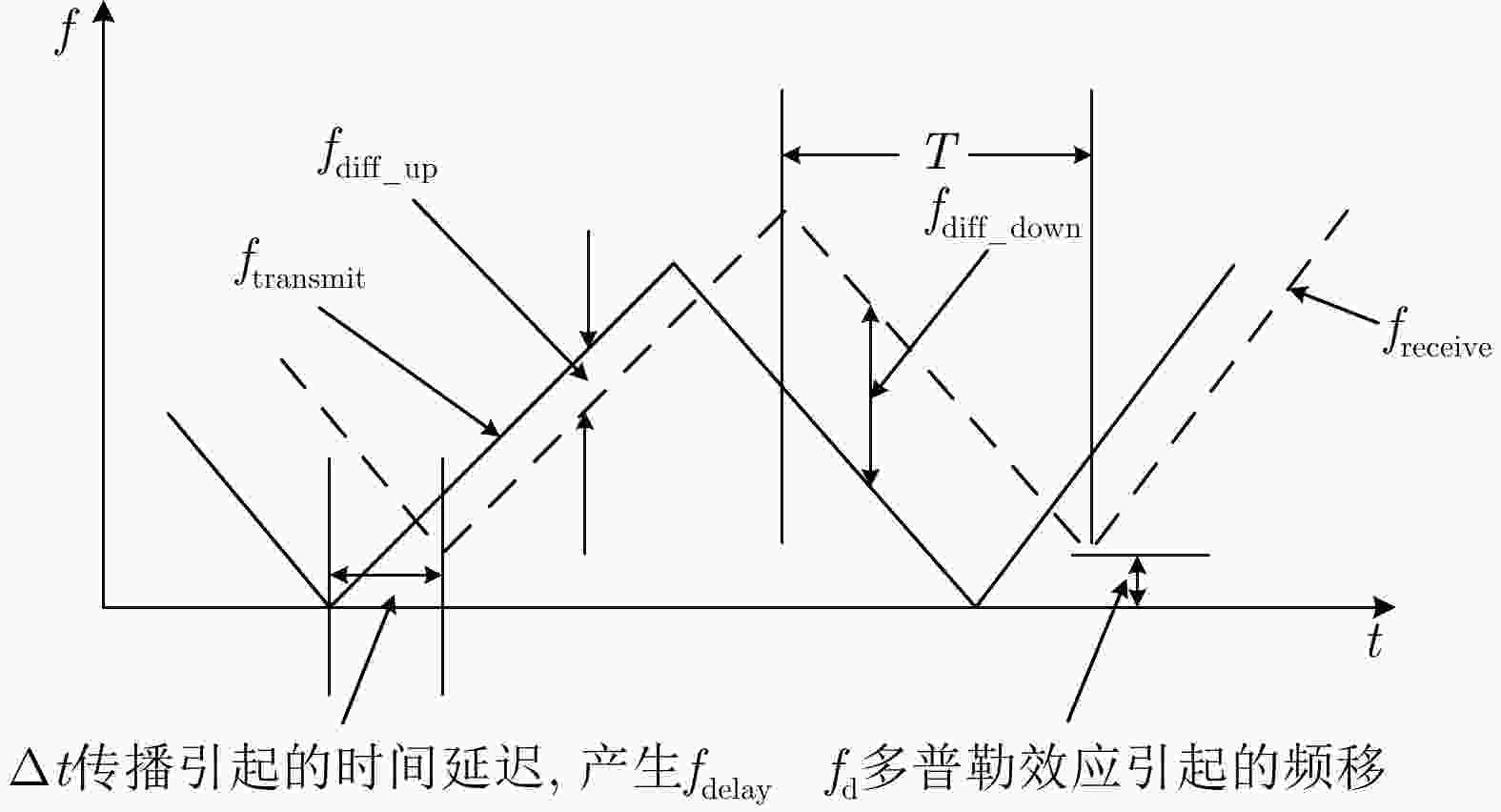
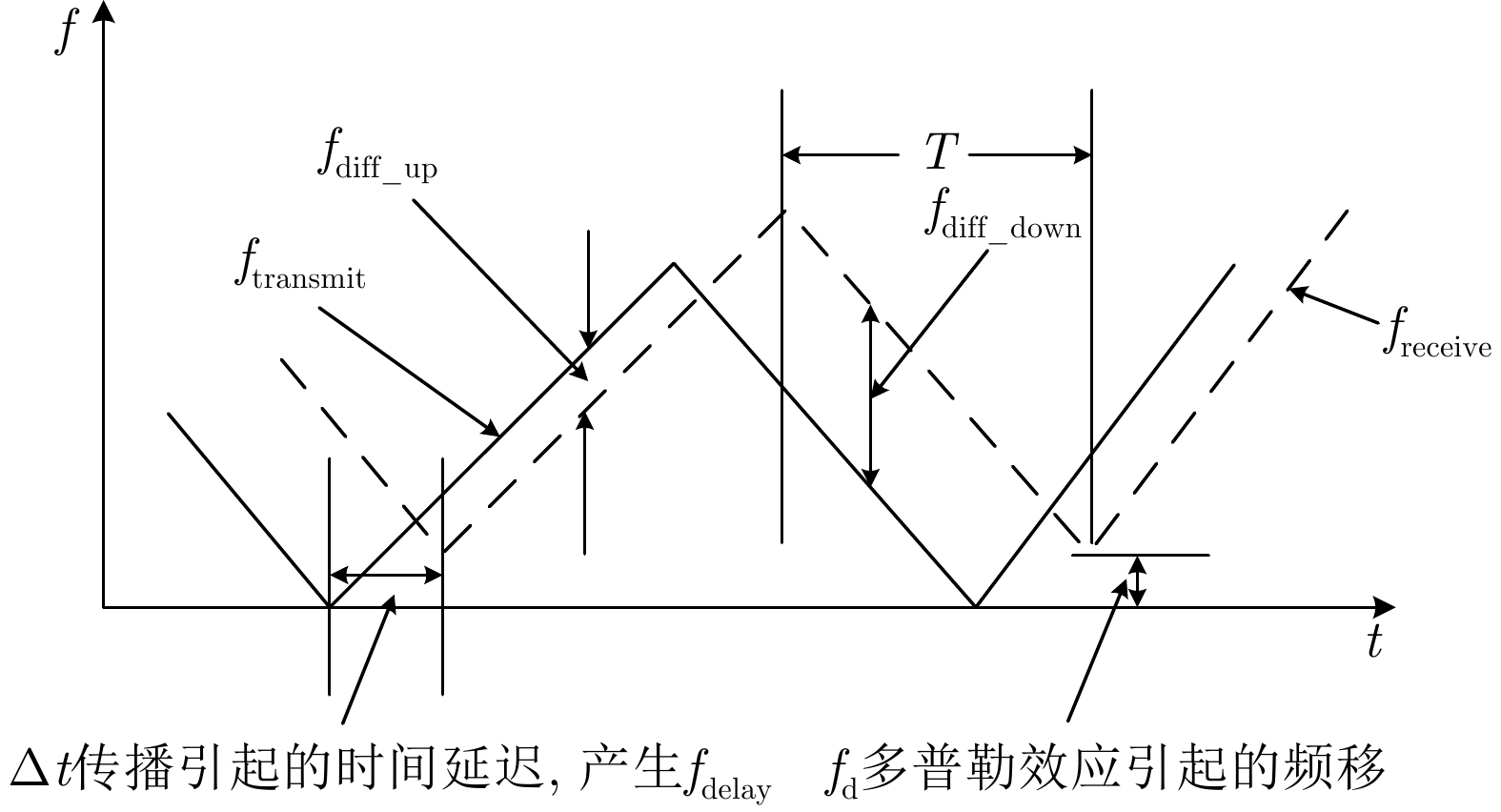
图 3 三角波调制FMCW雷达发射和接收信号示意图
Figure 3. Diagram of the transmitted and received signals of the triangular wave modulated FMCW radar
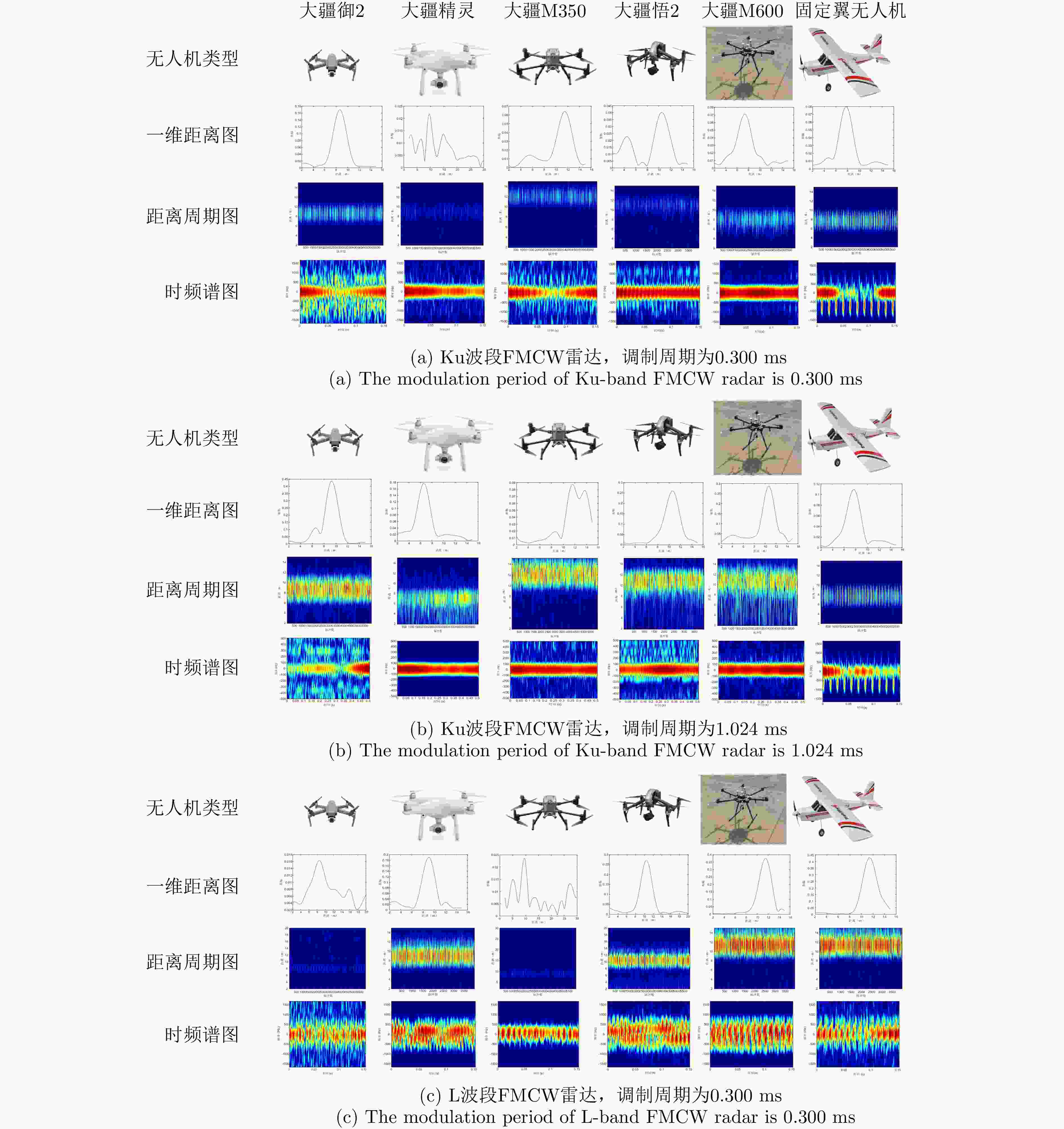
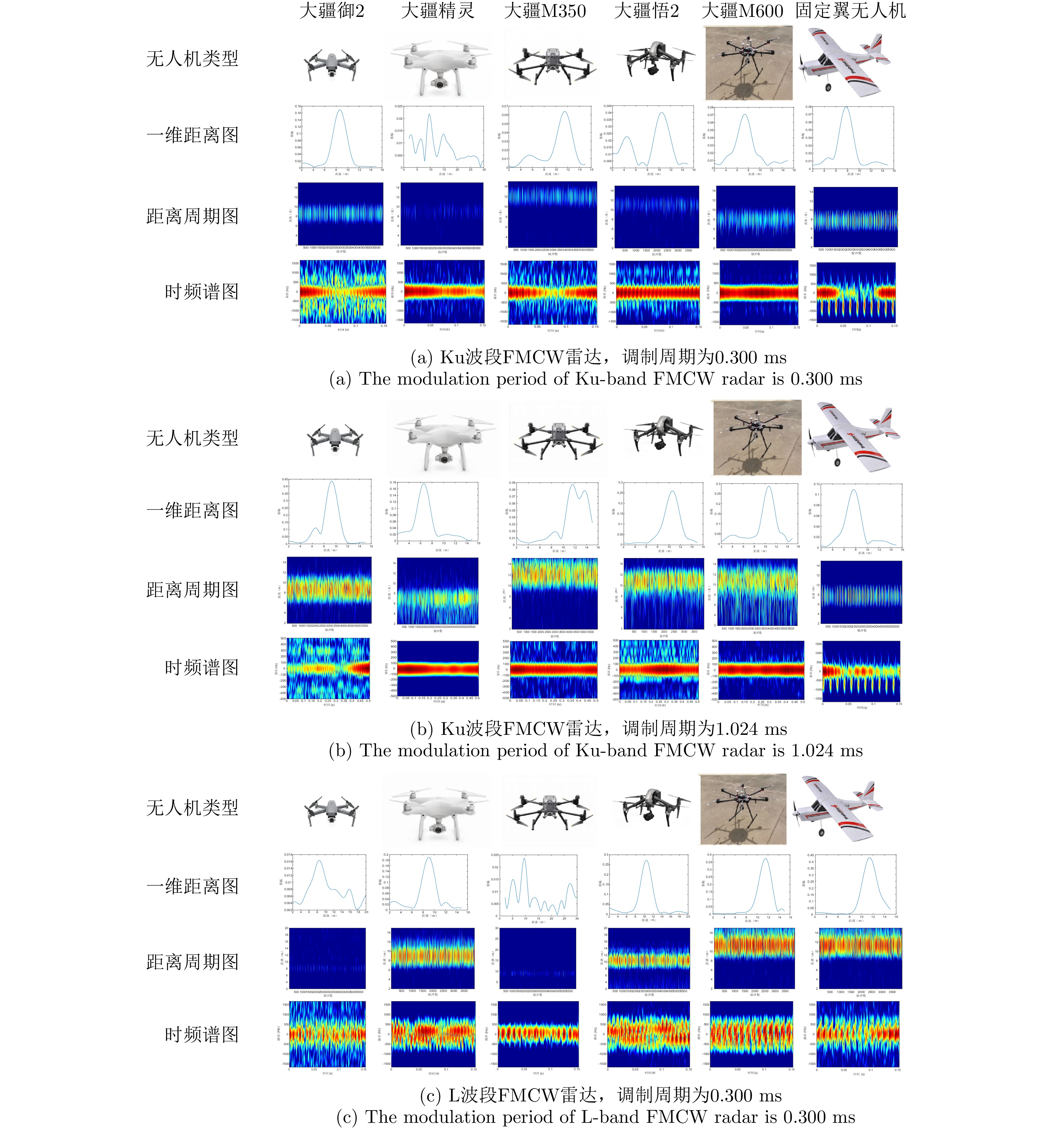
图 5 各类型无人机时频谱图及距离周期图
Figure 5. Time spectrum and range Doppler of various types of unmanned aerial vehicles
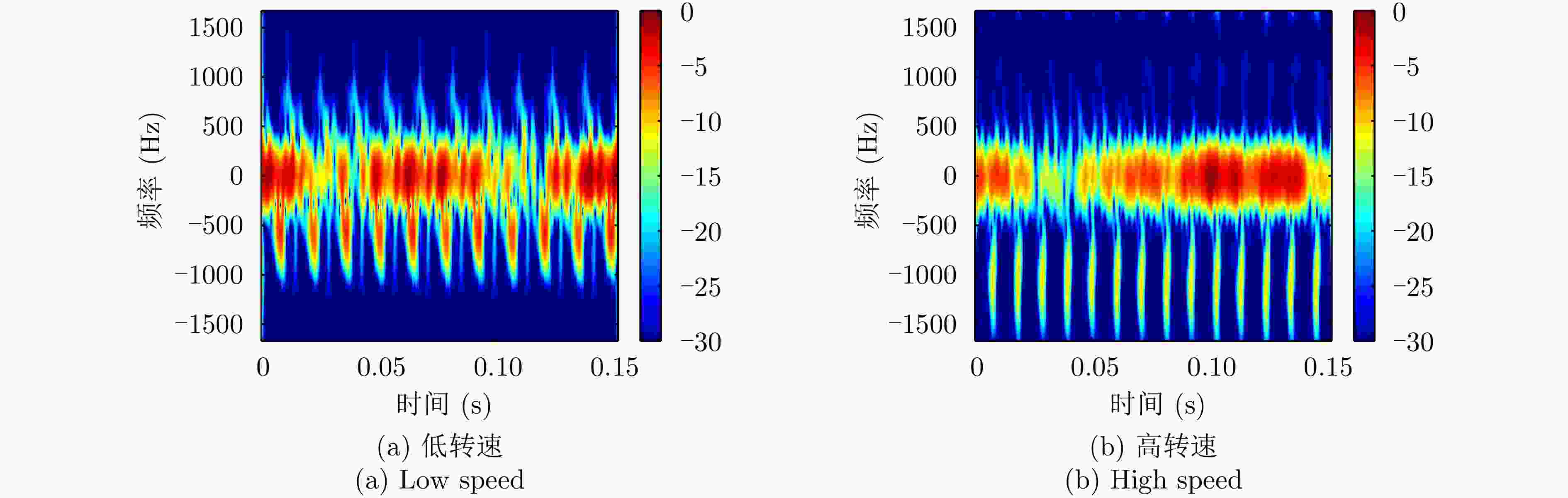
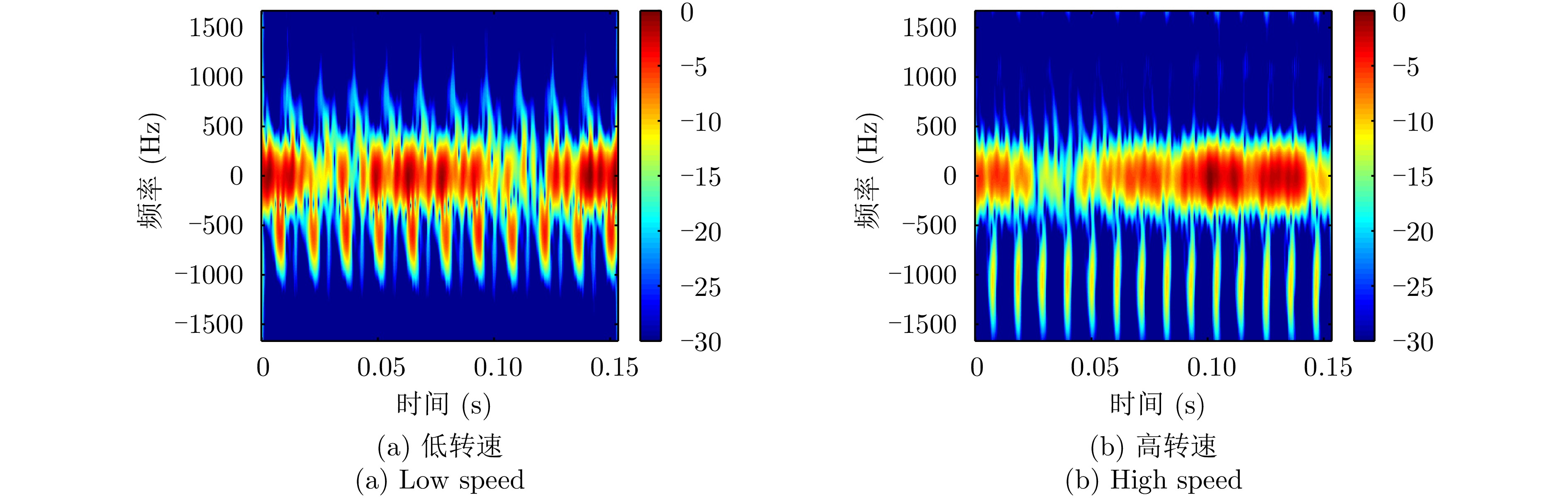
图 6 固定翼无人机的时频图(06-2023.5.8-0.3-100-9-K (1))
Figure 6. Time spectrum diagram of fixed wing UAV
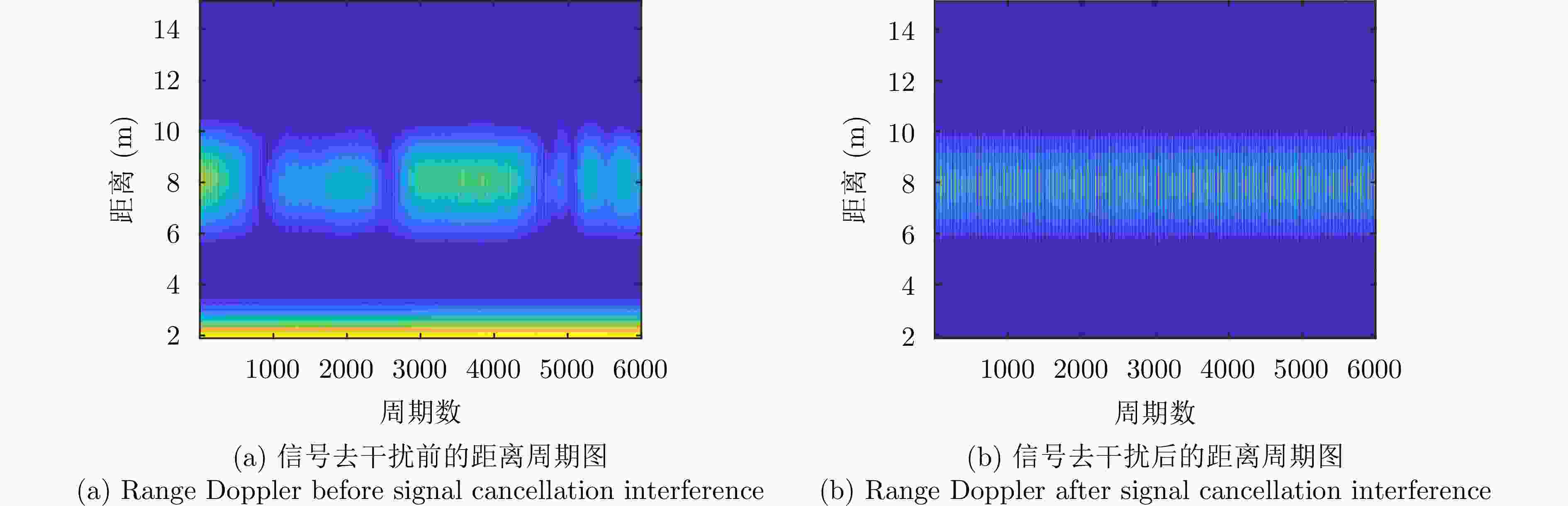
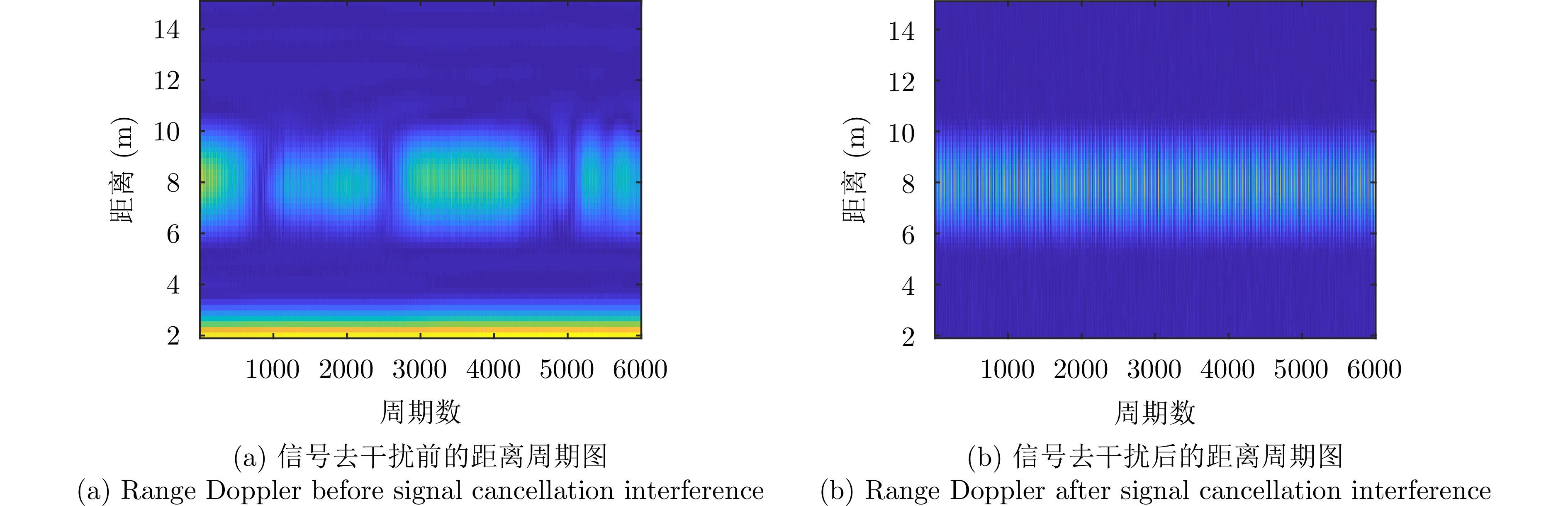
图 11 去抖动干扰前和去抖动干扰后的距离周期图(LSS-FMCWR-1.0:06-2023.5.8-0.3-100-9-K (1).mat)
Figure 11. Data before and after removing jitter interference (LSS-FMCWR-1.0:06-2023.5.8-0.3-100-9-K (1).mat)
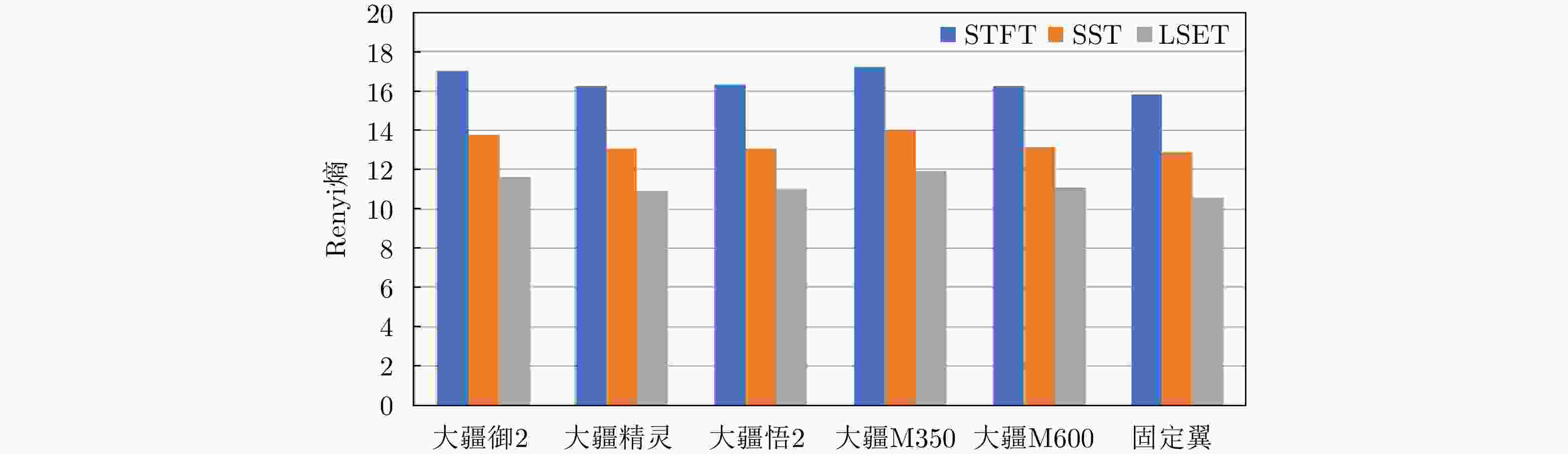
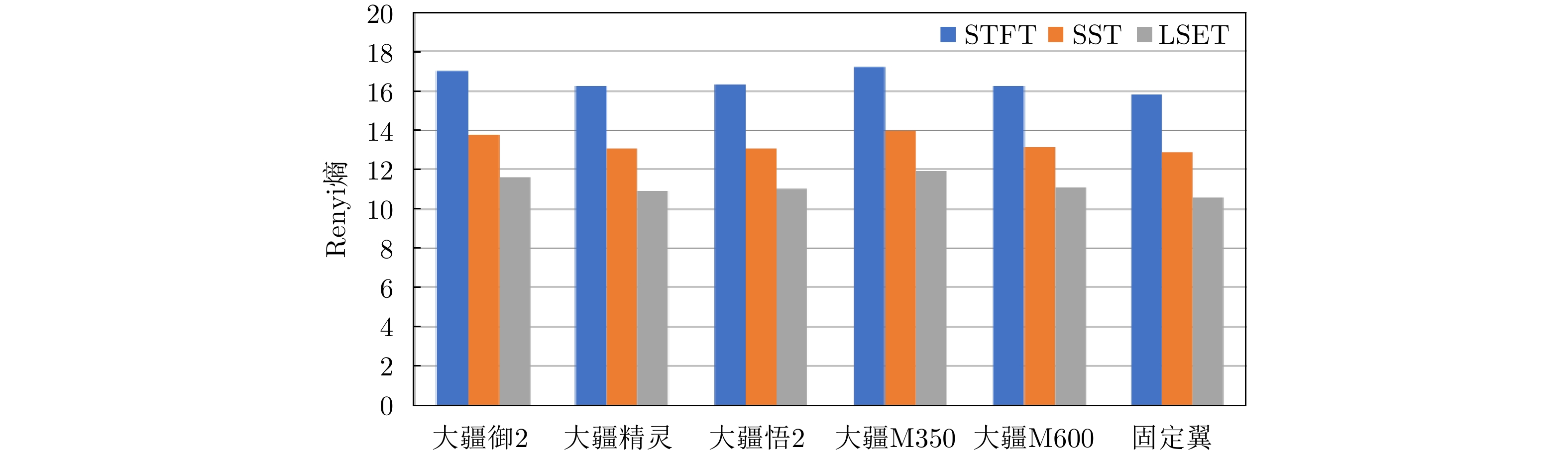
图 12 不同时频方法的Renyi熵值
Figure 12. Renyi entropy values for different time-frequency methods

图 13 在不同信噪比下,不同时频方法的Renyi熵值
Figure 13. Under different SNRs, the Renyi entropies of the different time-frequency analysis methods
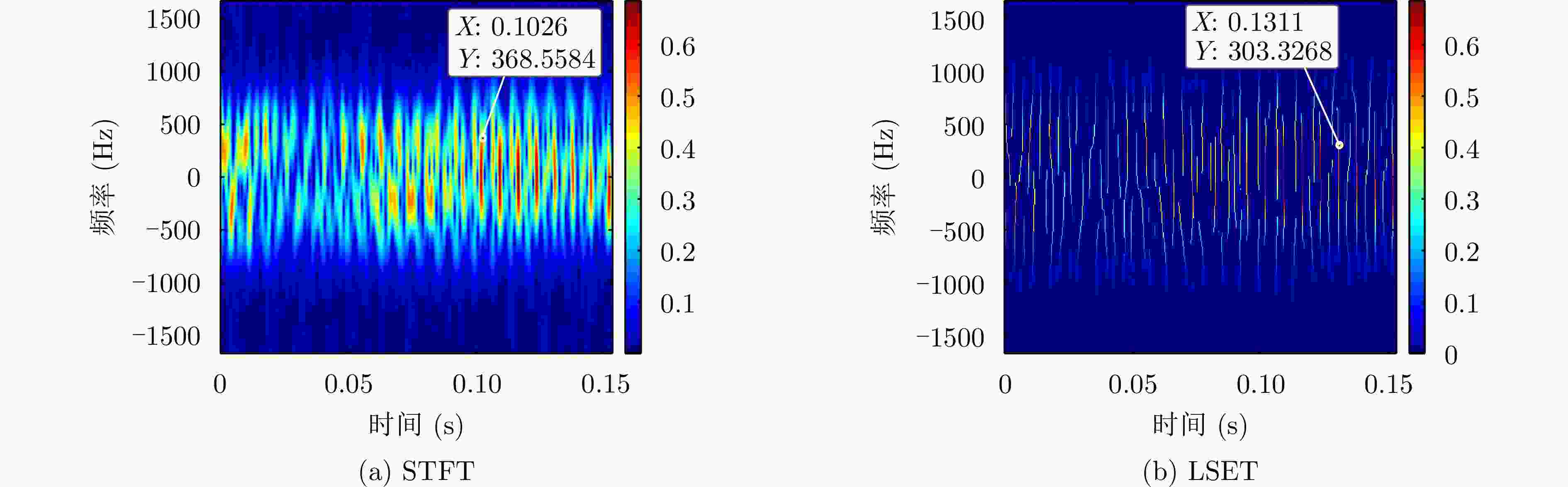
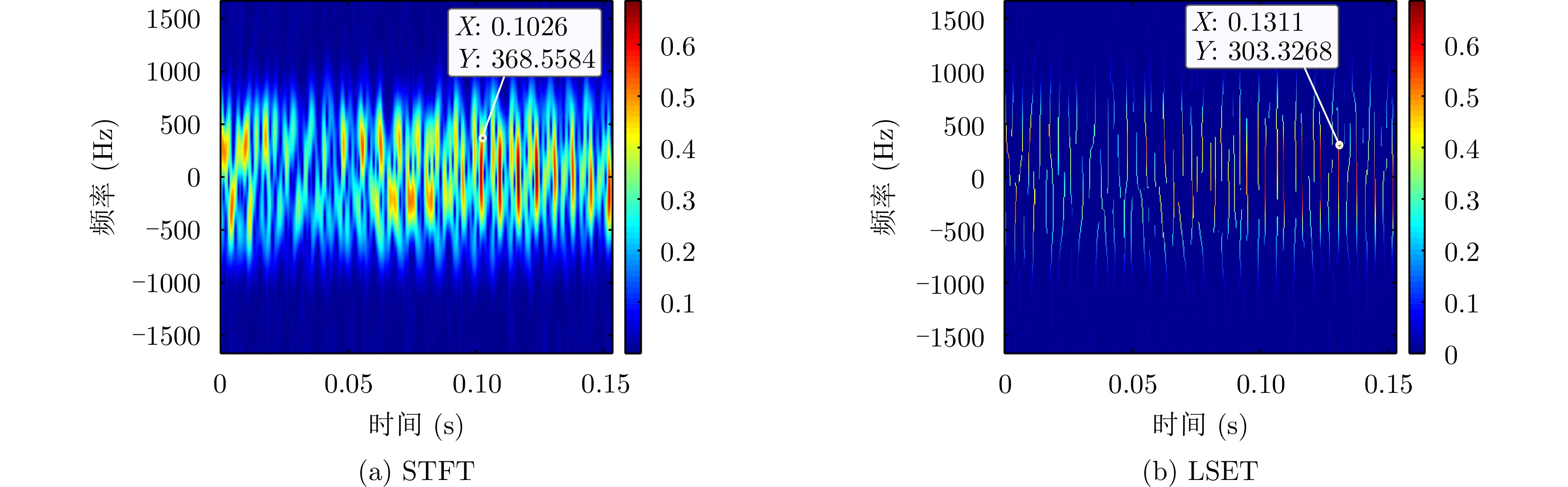
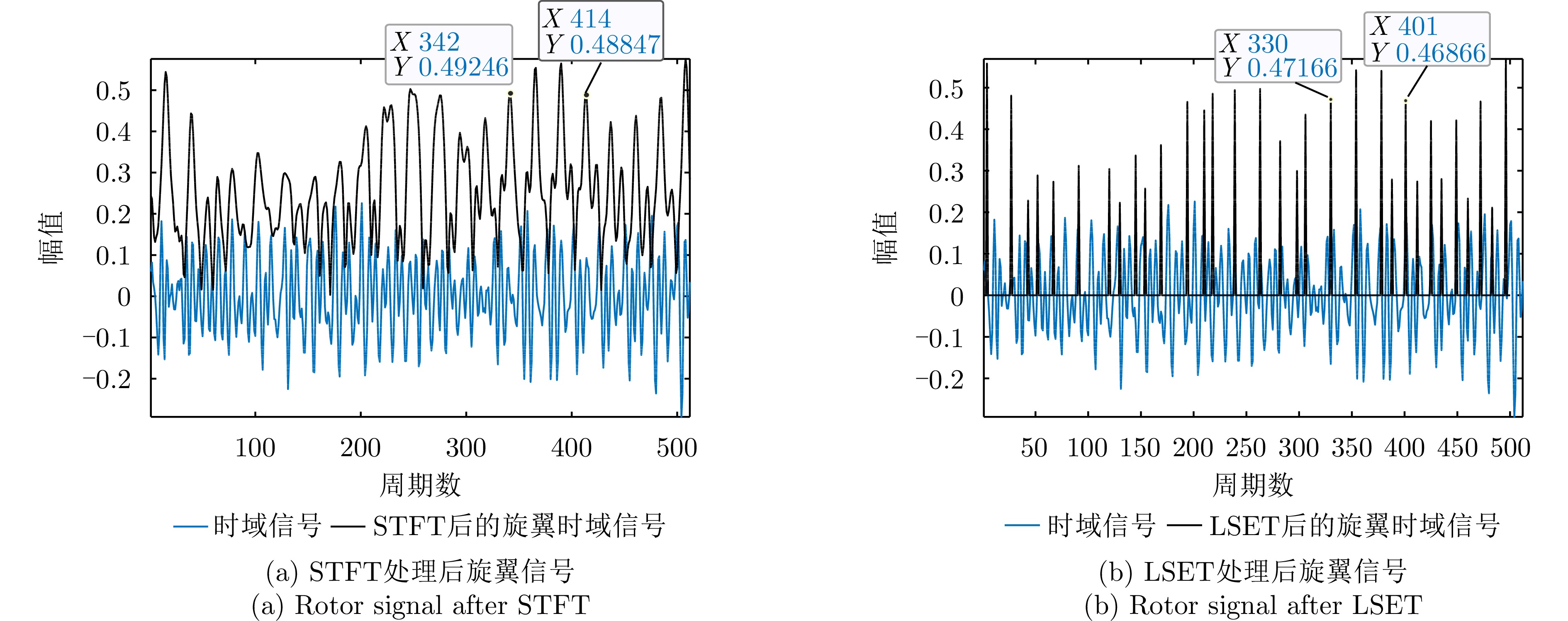
图 14 悟2无人机信号STFT和LSET (LSS-FMCWR-1.0: 04-2023.5.8-0.3-100-13-L (18).mat)
Figure 14. STFT and LSET of Wu 2 UAV signal (LSS-FMCWR-1.0: 04-2023.5.8-0.3-100-13-L (18).mat)

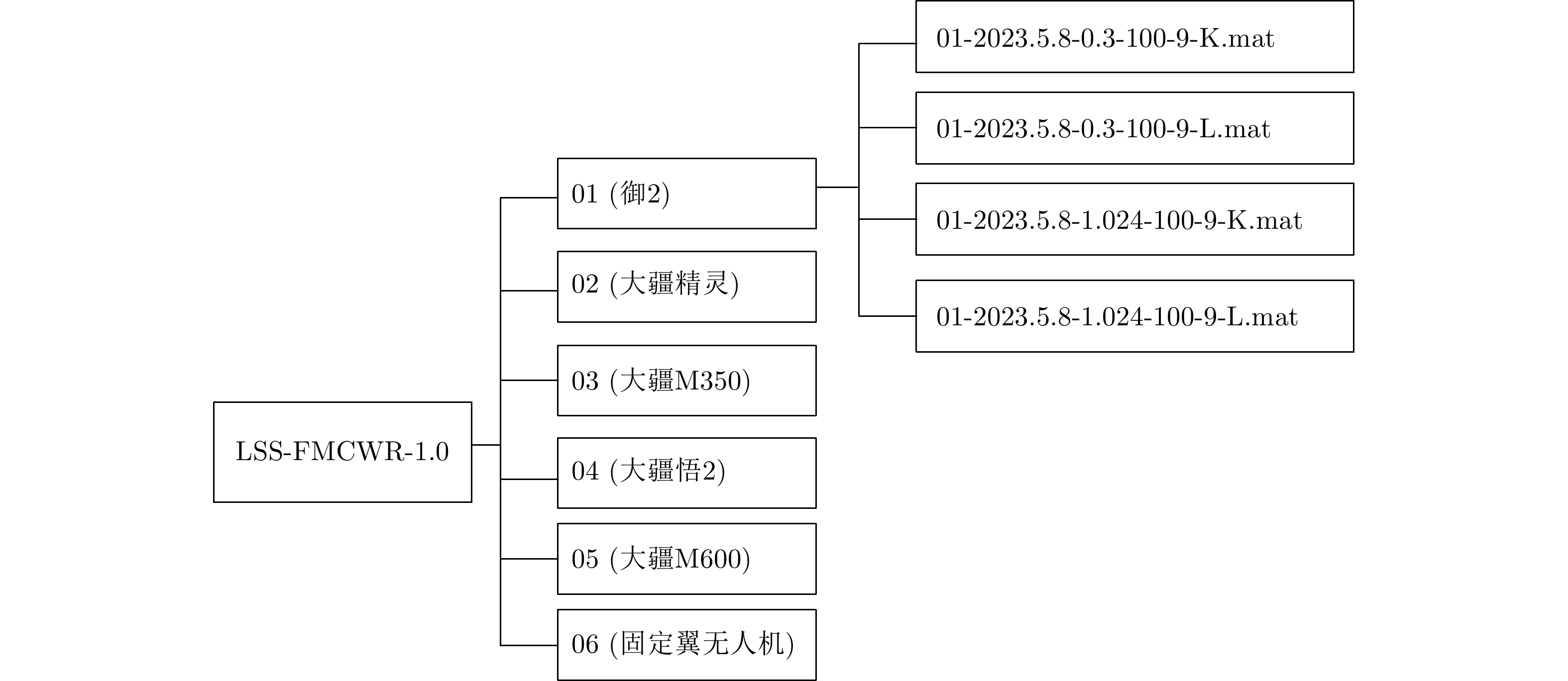
图 17 LSS-FMCWR-1.0:多波段FMCW雷达低慢小探测数据集
Figure 17. Release webpage of LSS-FMCWR-1.0: Multiband FMCW radar LSS-target echo dataset
表 1 Ku波段和L波段FMCW雷达主要技术参数
Table 1. Ku-band and L-band FMCW radar main technical indicators
FMCW雷达
波段工作频率(GHz) 调制带宽(MHz) 调制周期
(ms)采样频率(kHz) Ku波段 23.7 10~2000 0.200~10.000 500 L波段 1.4~1.5 100 0.300~8.192 500  下载: 导出CSV
下载: 导出CSV
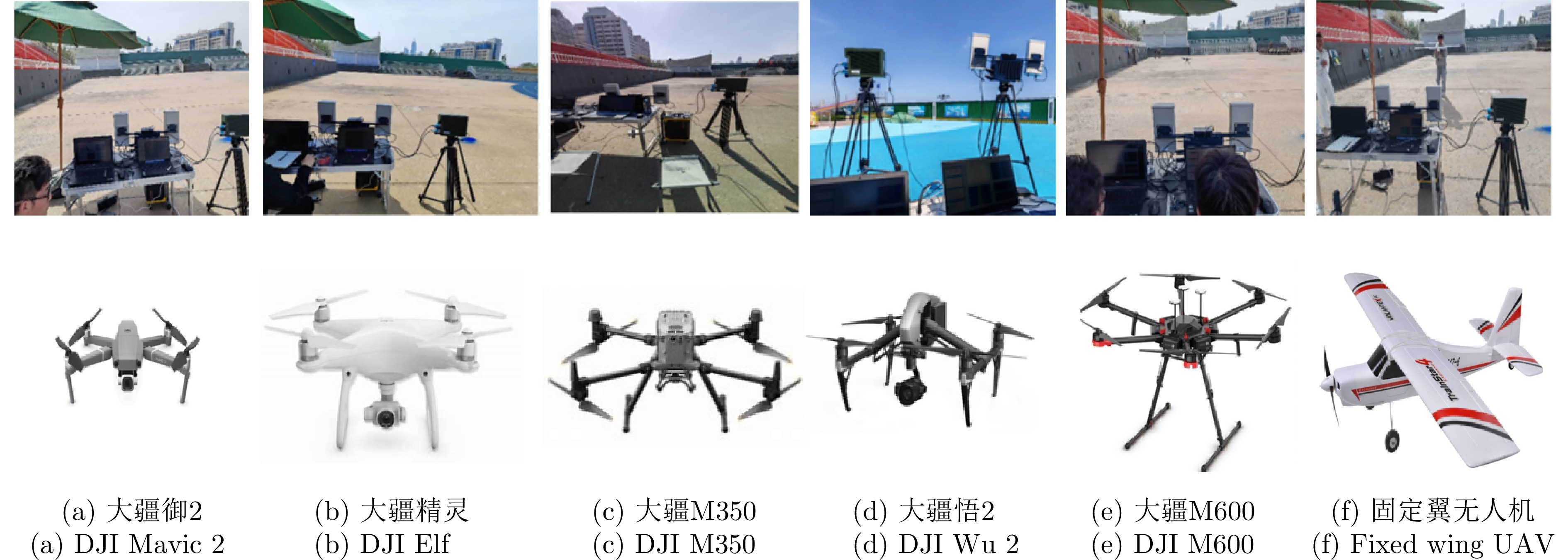
表 2 无人机主要技术参数
Table 2. The main technical parameters of the UAV
无人机类型 旋翼个数 转速(r/min) 叶片长度(cm) 大疆御2 4 1950 11 大疆精灵 4 1320 13 大疆M350 4 1750 11 大疆悟2 4 1500 19 大疆M600 6 1620 12 固定翼无人机 1 360 12
下载: 导出CSV
表 3 无人机采集参数设置(目标距离为估值)
Table 3. UAV acquisition parameter settings
无人机类型及编号 调制带宽(MHz) 调制周期(ms) 目标距离(m) 雷达波段
Ku/L大疆御2(01) 100 0.300 9 Ku+L 1.024 9 Ku+L 大疆精灵(02) 100 0.300 9 Ku+L 1.024 9 Ku+L 大疆M350(03) 100 0.300 12 Ku+L 1.024 12 Ku+L 200 0.300 12 Ku 1.024 12 Ku 300 0.300 12 Ku 1.024 12 Ku 大疆悟2(04) 100 0.300 11 Ku+L 1.024 11 Ku+L 大疆M600(05) 100 0.300 8 Ku 11 L 1.024 11 Ku 13 L 固定翼无人机(06) 100(正视) 0.300(低速) 9 Ku+L 0.300(高速) 9 Ku+L 4.192 9 Ku+L 500 4.192 9 Ku 100(侧视) 0.300(低速) 9 Ku+L 0.300(高速) 9 Ku+L 4.192 9 Ku+L 500 4.192 9 Ku
下载: 导出CSV
表 4 时频方法的运算时间
Table 4. Time-frequency method execution time
时频方法 运行时间(s) STFT 0.019 SST 1.053 SET 0.063 LSET 0.503
下载: 导出CSV
表 5 悟2无人机叶片转速和长度的估计
Table 5. Estimation of blade speed and length for Wu2 UAV
时频分析方法 转速(r/s) 叶片长度(cm) 理论值 估计值 相对误差 理论值 估计值 相对误差 STFT 25 22.83 8% 19 25.6 34.7% LSET 25 23.4 6% 19 20.5 7.0%
下载: 导出CSV
-
[1] 陈小龙, 南钊, 张海, 等. 飞鸟与旋翼无人机雷达微多普勒测量实验研究[J]. 电波科学学报, 2021, 36(5): 704–714. doi: 10.12265/j.cjors.2020192.CHEN Xiaolong, NAN Zhao, ZHANG Hai, et al. Experimental research on radar micro-Doppler of flying bird and rotor UAV[J]. Chinese Journal of Radio Science, 2021, 36(5): 704–714. doi: 10.12265/j.cjors.2020192. [2] 陈小龙, 陈唯实, 饶云华, 等. 飞鸟与无人机目标雷达探测与识别技术进展与展望[J]. 雷达学报, 2020, 9(5): 803–827. doi: 10.12000/JR20068.CHEN Xiaolong, CHEN Weishi, RAO Yunhua, et al. Progress and prospects of radar target detection and recognition technology for flying birds and unmanned aerial vehicles[J]. Journal of Radars, 2020, 9(5): 803–827. doi: 10.12000/JR20068. [3] 何炜琨, 孙景波, 王晓亮, 等. 基于RSP-CFD方法的小型旋翼无人机微动特征提取[J]. 信号处理, 2021, 37(3): 399–408. doi: 10.16798/j.issn.1003-0530.2021.03.010.HE Weikun, SUN Jingbo, WANG Xiaoliang, et al. Micro-motion feature extraction of micro-rotor UAV based on RSP-CFD method[J]. Journal of Signal Processing, 2021, 37(3): 399–408. doi: 10.16798/j.issn.1003-0530.2021.03.010. [4] 宋晨, 周良将, 吴一戎, 等. 基于时频集中度指标的多旋翼无人机微动特征参数估计方法[J]. 电子与信息学报, 2020, 42(8): 2029–2036. doi: 10.11999/JEIT190309.SONG Chen, ZHOU Liangjiang, WU Yirong, et al. An estimation method of micro-movement parameters of UAV based on the concentration of time-frequency[J]. Journal of Electronics & Information Technology, 2020, 42(8): 2029–2036. doi: 10.11999/JEIT190309. [5] SONG Chen, WU Yirong, ZHOU Liangjiang, et al. A multicomponent micro-Doppler signal decomposition and parameter estimation method for target recognition[J]. Science China Information Sciences, 2019, 62(2): 29304. doi: 10.1007.s11432-0180-9491-y. [6] 马娇, 董勇伟, 李原, 等. 多旋翼无人机微多普勒特性分析与特征提取[J]. 中国科学院大学学报, 2019, 36(2): 235–243. doi: 10.7523/j.issn.2095-6134.2019.02.011.MA Jiao, DONG Yongwei, LI Yuan, et al. Multi-rotor UAV’s micro-Doppler characteristic analysis and feature extraction[J]. Journal of University of Chinese Academy of Sciences, 2019, 36(2): 235–243. doi: 10.7523/j.issn.2095-6134.2019.02.011. [7] HE Weikun, SUN Jingbo, ZHANG Xinyun, et al. Micro-Doppler feature extraction of micro-rotor UAV under the background of low SNR[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1127–1139. doi: 10.23919/JSEE.2022.000138. [8] YANG Degui, LI Jin, LIANG Buge, et al. A multi-rotor drone micro-motion parameter estimation method based on CVMD and SVD[J]. Remote Sensing, 2022, 14(14): 3326. doi: 10.3390/rs14143326. [9] KANG K B, CHOI J H, CHO B L, et al. Analysis of micro-Doppler signatures of small UAVs based on Doppler spectrum[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 3252–3267. doi: 10.1109/TAES.2021.3074208. [10] AUGER F and FLANDRIN P. Improving the readability of time-frequency and time-scale representations by the reassignment method[J]. IEEE Transactions on Signal Processing, 1995, 43(5): 1068–1089. doi: 10.1109/78.382394. [11] LI Zhen, GAO Jinghuai, LI Hui, et al. Synchroextracting transform: The theory analysis and comparisons with the synchrosqueezing transform[J]. Signal Processing, 2020, 166: 107243. doi: 10.1016/j.sigpro.2019.107243. [12] YU Gang, YU Mingjin, and XU Chuanyan. Synchroextracting transform[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8042–8054. doi: 10.1109/TIE.2017.2696503. [13] 章鹏飞, 李刚, 霍超颖, 等. 基于双雷达微动特征融合的无人机分类识别[J]. 雷达学报, 2018, 7(5): 557–564. doi: 10.12000/JR18061.ZHANG Pengfei, LI Gang, HUO Chaoying, et al. Classification of drones based on micro-Doppler radar signatures using dual radar sensors[J]. Journal of Radars, 2018, 7(5): 557–564. doi: 10.12000/JR18061. [14] PARK J, JUNG D H, BAE K B, et al. Range-Doppler map improvement in FMCW radar for small moving drone detection using the stationary point concentration technique[J]. IEEE Transactions on Microwave Theory and Techniques, 2020, 68(5): 1858–1871. doi: 10.1109/TMTT.2019.2961911. [15] 杜兰, 陈晓阳, 石钰, 等. MMRGait-1.0: 多视角多穿着条件下的雷达时频谱图步态识别数据集[J]. 雷达学报, 2023, 12(4): 892–905. doi: 10.12000/JR22227.DU Lan, CHEN Xiaoyang, SHI Yu, et al. MMRGait-1.0: A radar time-frequency spectrogram dataset for gait recognition under multi-view and multi-wearing conditions[J]. Journal of Radars, 2023, 12(4): 892–905. doi: 10.12000/JR22227. [16] 金添, 宋永坤, 戴永鹏, 等. UWB-HA4D-1.0: 超宽带雷达人体动作四维成像数据集[J]. 雷达学报, 2022, 11(1): 27–39. doi: 10.12000/JR22008.JIN Tian, SONG Yongkun, DAI Yongpeng, et al. UWB-HA4D-1.0: An ultra-wideband radar human activity 4D imaging dataset[J]. Journal of Radars, 2022, 11(1): 27–39. doi: 10.12000/JR22008. [17] LEONARDI M, LIGRESTI G, PIRACCI E, et al. Drones classification by the use of a multifunctional radar and micro-Doppler analysis[J]. Drones, 2022, 6(5): 124. doi: 10.3390/drones6050124. [18] RAVAL D, HUNTER E, HUDSON S, et al. Convolutional neural networks for classification of drones using radars[J]. Drones, 2021, 5(4): 149. doi: 10.3390/drones 5040149. -







计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

