
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 多径利用雷达(MER)目标探测技术主要基于电磁波在介质表面的反射、衍射等非直视(NLOS)多路径传播特性,实现对城市街角、车辆遮挡等“视觉”盲区内隐蔽目标的有效探测,其能够为城市作战、智能驾驶等多种应用提供服务,具有重要的现实意义和研究价值。为获知该领域的发展脉络,并预测未来可能的发展趋势,该文对21世纪初以来该领域国内外公开文献进行了归纳总结。相关文献的梳理结果表明,根据探测平台类型的不同,多径利用雷达目标探测技术目前主要包括两类:基于空中平台的多径探测技术和基于地面平台的多径探测技术。这两类技术均已取得一定具有实际意义的研究成果。针对空中平台,该文围绕可行性验证、影响因素分析、建筑环境感知和非视距目标探测4个方面展开梳理;针对地面平台,该文则从目标检测与识别、目标二维定位、目标三维信息获取及新型探测方法4个方面展开论述。最后,对多径利用雷达目标探测技术进行总结和展望,指出该技术在目前实际应用中所面临的潜在问题和挑战。这些结果表明,多径利用雷达目标探测技术正朝着多样化、智能化的方向发展。
-
关键词:
- 城市遮蔽环境 /
- 非直视(NLOS) /
- 多径利用雷达(MER) /
- 目标探测 /
- 未来发展
Abstract: The Multipath Exploitation Radar (MER) target detection technology is primarily based on the Non-Line-Of-Sight (NLOS) multipath propagation characteristics of electromagnetic waves, such as reflection and diffraction on the surface of the medium, enabling the effective detection of targets hidden in the “visually” blind area, such as urban street corners and vehicle occlusion. Thus, the technology can be feasible for various applications, including urban combat and intelligent driving. Further, it has significant practical and research implications. This paper summarizes the domestic and foreign literature in this field since the beginning of the 21st century to keep abreast of developments in this field and predict future development trends. The literature review revealed that according to the different types of detection platforms, MER target detection technology primarily consists of multipath detection technologies based on air and ground platforms. Both these technologies have achieved certain produced research results of practical significance. For air platforms, the following aspects are discussed: feasibility verification, analysis of influencing factors, architectural environment perception, and NLOS target detection. Further, for ground platforms, these four aspects are covered: target detection and recognition, two-dimensional target positioning, three-dimensional target information acquisition, and new detection methods. Finally, the prospects of MER target detection technology are summarized, and the potential issues and challenges in the current practical application of this technology are highlighted. These results show that MER target detection technology is evolving toward diversification and intelligence. -

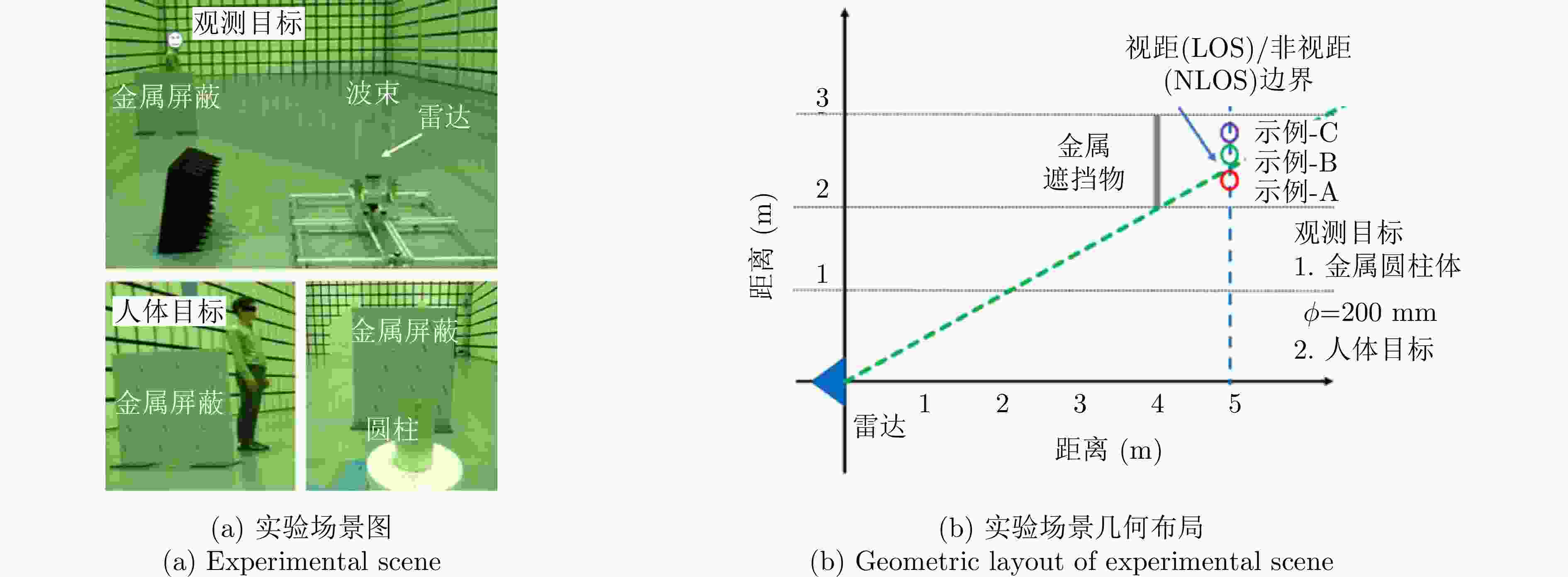



表 1 不同极化电磁波双程路径衰减随频率和材质变化[9] (dB)
Table 1. Two-way attenuation of different polarized EM waves varies with frequency and material[9] (dB)
极化方式 材质 X波段 Ku波段 Ka波段 垂直 胶合板 10~23 8~19 13~38 泥灰 5~17 6~18 10~25 混凝土块 10~22 5~20 5~20 砖 5~18 7~24 10~25 水平 胶合板 15~33 15~40 20~60 泥灰 3~17 15~30 17~50 混凝土块 10~35 11~43 12~57 砖 12~35 16~45 20~54  下载: 导出CSV
下载: 导出CSV
表 2 时变的特征向量在LOS和NLOS情况下对人体和圆柱体的分类结果[34]
Table 2. Classification results of human body and cylinder under LOS and NLOS by time-varying eigenvectors[34]
示例 准确度(%) SNR (dB) 特征1
(原始回波)特征2
(时间倒数)特征3
(时间偏移)特征4
(STFT)人体 圆柱体 示例A(LOS) 100 99 100 100 27.73 35.43 示例B(部分NLOS) 100 99 100 93 8.35 9.33 示例C(全部NLOS) 60 64 83 81 1.51 –0.30
下载: 导出CSV
-
[1] 李松林. 城市环境多路径信号联合探测技术[D]. [硕士论文], 电子科技大学, 2021: 1–8.LI Songlin. Multipath signals joint detection technology in urban environment[D]. [Master dissertation], University of Electronic Science and Technology of China, 2021: 1–8. [2] MARTONE A F, RANNEY K, and LE C. Noncoherent approach for through-the-wall moving target indication[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 193–206. doi: 10.1109/TAES.2013.120329 [3] SMITH G E and MOBASSERI B G. Multipath exploitation for radar target classification[C]. 2012 IEEE Radar Conference, Atlanta, USA, 2012: 623–628. [4] DEBES C, RIEDLER J, ZOUBIR A M, et al. Adaptive target detection with application to through-the-wall radar imaging[J]. IEEE Transactions on Signal Processing, 2010, 58(11): 5572–5583. doi: 10.1109/TSP.2010.2063027 [5] 郭世盛. 建筑环境多径信号抑制与利用方法研究[D]. [博士论文], 电子科技大学, 2019: 1–11.GUO Shisheng. Multipath signals suppression and exploitation algorithms in urban environment[D]. [Ph.D. dissertation], University of Electronic Science and Technology of China, 2019: 1–11. [6] KROLIK J L, FARRELL J, and STEINHARDT A. Exploiting multipath propagation for GMTI in urban environments[C]. 2006 IEEE Conference on Radar, Verona, USA, 2006: 4. [7] LINNEHAN R, DEMING R, and SCHINDLER J. Multipath analysis of dismount radar responses[C]. 2011 IEEE RadarCon (RADAR), Kansas City, USA, May, 2011: 474–479. [8] LINNEHAN R and SCHINDLER J. Multistatic scattering from moving targets in multipath environments[C]. 2009 IEEE Radar Conference, Pasadena, USA, 2009: 1–6. [9] TAHMOUSH D, SILVIOUS J, and BENDER B. Radar surveillance in urban environments[C]. 2012 IEEE Radar Conference, Atlanta, USA, 2012: 220–225. [10] NOUVEL J F, VAIZAN B, DU PLESSIS O R, et al. Ka band measurements over urban area, a study of NLOS back-scattering[C]. 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 3615–3618. [11] NOUVEL J F and LESTURGIE M. Study of NLOS detection over urban area at Ka band through multipath exploitation[C]. 2014 International Radar Conference, Lille, France, 2014: 1–5. [12] CHENG Ruichang, LIANG Xingdong, ZHANG Fubo, et al. Multipath scattering of typical structures in urban areas[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(1): 342–351. doi: 10.1109/TGRS.2018.2854660 [13] CHENG Ruichang, LIANG Xingdong, ZHANG Fubo, et al. Multiple-bounce modeling of high-rise buildings with airborne tomography array[C]. 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 2018: 791–796. [14] LI Xiaowan, ZHANG Fubo, LIANG Xingdong, et al. Fourfold bounce scattering-based reconstruction of building backs using airborne array TomoSAR point clouds[J]. Remote Sensing, 2022, 14(8): 1937. doi: 10.3390/rs14081937 [15] FERTIG L B, BADEN M J, KERCE J C, et al. Localization and tracking with multipath exploitation radar[C]. 2012 IEEE Radar Conference, Atlanta, USA, 2012: 1014–1018. [16] FERTIG L B, BADEN J M, and GUERCI J R. Knowledge-aided processing for multipath exploitation radar (MER)[J]. IEEE Aerospace and Electronic Systems Magazine, 2017, 32(10): 24–36. doi: 10.1109/MAES.2017.160035 [17] NOUVEL J F, DUPUIS X, and LESTURGIE M. Non line of sight signal analysis: Investigation of interferometry modes over urban area[C]. 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 2016: 1–5. [18] CHAKRABORTY B, LI Ying, ZHANG J J, et al. Multipath exploitation with adaptive waveform design for tracking in urban terrain[C]. 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, USA, 2010: 3894–3897. [19] 胡刘博. 基于多径利用的城区目标探测方法研究[D]. [硕士论文], 西安电子科技大学, 2019: 19–40.HU Liubo. Research on urban target detection based on multipath exploitation[D]. [Master dissertation], Xidian University, 2019: 19–40. [20] XIE Peng and PETOVELLO M G. Measuring GNSS multipath distributions in urban canyon environments[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(2): 366–377. doi: 10.1109/TIM.2014.2342452 [21] KO H, KIM B, and KONG S H. GNSS multipath-resistant cooperative navigation in urban vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2015, 64(12): 5450–5463. doi: 10.1109/TVT.2015.2481509 [22] ZHANG Shiwen, LO S, CHEN Y H, et al. GNSS multipath detection in urban environment using 3D building model[C]. 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, USA, 2018: 1053–1058. [23] OBST M, BAUER S, and WANIELIK G. Urban multipath detection and mitigation with dynamic 3D maps for reliable land vehicle localization[C]. 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, USA, 2012: 685–691. [24] NG Y and GAO G X. Direct position estimation utilizing non-line-of-sight (NLOS) GPS signals[C]. 29th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, USA, 2016: 1279–1284. [25] SUME A, GUSTAFSSON M, JÄNIS A, et al. Radar detection of moving objects around corners[C]. SPIE 7308, Radar Sensor Technology XIII, Orlando, USA, 2009: 73080V. [26] DEIANA D, KOSSEN A S, and VAN ROSSUM W L. Multipath exploitation in an urban environment using a MIMO surveillance radar[C]. 11-th International Radar Symposium, Vilnius, Lithuania, 2010: 1–4. [27] RABASTE O, COLIN-KOENIGUER E, POULLIN D, et al. Around-the-corner radar: Detection of a human being in non-line of sight[J]. IET Radar, Sonar & Navigation, 2015, 9(6): 660–668. doi: 10.1049/iet-rsn.2014.0337 [28] SUME A, GUSTAFSSON M, HERBERTHSON M, et al. Radar detection of moving targets behind corners[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6): 2259–2267. doi: 10.1109/TGRS.2010.2096471 [29] JOHANSSON T, ÖRBOM A, SUME A, et al. Radar measurements of moving objects around corners in a realistic scene[C]. SPIE 9077, Radar Sensor Technology XVIII, Baltimore, USA, 2014: 90771Q. [30] GUSTAFSSON M, ANDERSSON Å, JOHANSSON T, et al. Extraction of human micro-doppler signature in an urban environment using a “sensing-behind-the-corner” radar[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(2): 187–191. doi: 10.1109/LGRS.2015.2504623 [31] LINNEHAN R and SCHINDLER J. Validating multipath responses of moving targets through urban environments[C]. 2010 IEEE Radar Conference, Arlington, USA, 2010: 1036–1041. [32] GUSTAFSSON M, ANDERSSON Å, JOHANSSON T, et al. Micro-Doppler extraction of a small UAV in a non-line-of-sight urban scenario[C]. SPIE 10188, Radar Sensor Technology XXI, Anaheim, USA, 2017: 101880U. [33] HE Jianghaomiao, TERASHIMA S, YAMADA H, et al. Human body recognition method using diffraction signal in NLOS scenario for millimeter wave radar[C]. 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, USA, 2020: 766–769. [34] HE Jianghaomiao, TERASHIMA S, YAMADA H, et al. Diffraction signal-based human recognition in non-line-of-sight (NLOS) situation for millimeter wave radar[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 4370–4380. doi: 10.1109/JSTARS.2021.3073678 [35] TIAN Yifan, NJILLA L, RAJA A, et al. Cost-effective NLOS detection for privacy invasion attacks by consumer drones[C]. 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, USA, 2019: 1–7. [36] LI Songlin, CUI Guolong, GUO Shisheng, et al. NLOS targets imaging with UWB radar[C]. 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 2019: 1–5. [37] 樊士豪. 城市非直视盲区遮蔽目标定位方法研究[D]. [硕士论文], 电子科技大学, 2020: 40–62.FAN Shihao. Research on target location method of urban non-line-of-sight blind area[D]. [Master dissertation], University of Electronic Science and Technology of China, 2020: 40–62. [38] LI Songlin, GUO Shisheng, CHEN Jiahui, et al. Multiple targets localization behind L-shaped corner via UWB radar[J]. IEEE Transactions on Vehicular Technology, 2021, 70(4): 3087–3100. doi: 10.1109/TVT.2021.3068266 [39] GUO Shisheng, LI Songlin, CUI Guolong, et al. MIMO radar localization of targets behind L-shaped corners[C]. IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 2020: 1–4. [40] TANG Quan, LI Jun, WANG Lingyu, et al. Multipath imaging for NLOS targets behind an L-shaped corner with single-channel UWB radar[J]. IEEE Sensors Journal, 2022, 22(2): 1531–1540. doi: 10.1109/JSEN.2021.3131665 [41] WANG Lingyu, TANG Quan, JIA Yong, et al. Multipath imaging for NLOS targets behind a T-shaped corridor with single-channel SFCW radar[C]. IEEE 6th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 2021: 396–400. [42] YANG Yiping, CHEN Chuan, JIA Yong, et al. Non-line-of-sight target detection based on dual-view observation with single-channel UWB radar[J]. Remote Sensing, 2022, 14(18): 4532. doi: 10.3390/rs14184532 [43] DU Huagui, FAN Chongyi, CHEN Zhen, et al. NLOS target localization with an L-band UWB radar via grid matching[J]. Progress in Electromagnetics Research M, 2020, 97: 45–56. doi: 10.2528/PIERM20071801 [44] FAN Shihao, CUI Guolong, GUO Shisheng, et al. Corner target positioning with unknown walls' positions[J]. The Journal of Engineering, 2019, 2019(19): 6143–6146. doi: 10.1049/JOE.2019.0176 [45] FUJITA S, SAKAMOTO T, and SATO T. An accurate UWB radar imaging method using indoor multipath echoes for targets in shadow regions[C]. 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 2010: 1–7. [46] FUJITA S, SAKAMOTO T, and SATO T. 2-dimensional accurate imaging with UWB radar using indoor multipath echoes for a target in shadow regions[J]. IEICE transactions on communications, 2011, E94.B(8): 2366–2374. doi: 10.1587/transcom.E94.B.2366 [47] FUJITA S, SAKAMOTO T, and SATO T. Accurate imaging of a moving target in shadow regions with UWB radar using Doppler effect[C]. 2012 6th European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 2012: 2130–2134. [48] SETLUR P, NEGISHI T, DEVROYE N, et al. Multipath exploitation in non-LOS urban synthetic aperture radar[J]. IEEE Journal of Selected Topics in Signal Processing, 2014, 8(1): 137–152. doi: 10.1109/JSTSP.2013.2287185 [49] GENNARELLI G and SOLDOVIERI F. A linear inverse scattering algorithm for radar imaging in multipath environments[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1085–1089. doi: 10.1109/LGRS.2012.2230314 [50] GUSTAFSSON M. Positioning of objects behind corners using X-band radar[C]. 2011 30th URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 2011: 1–4. [51] DODDALLA S K and TRICHOPOULOS G C. Non-line of sight terahertz imaging from a single viewpoint[C]. 2018 IEEE/MTT-S International Microwave Symposium-IMS, Philadelphia, USA, 2018: 1527–1529. [52] WEN Yanbo, WEI Shunjun, WEI Jinshan, et al. Non-line-of-sight imaging of hidden moving target using millimeter-wave inverse synthetic aperture radar[C]. 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 2022: 555–558. [53] WEI Jinshan, WEI Shunjun, LIU Xinyuan, et al. Non-line-of-sight imaging by millimeter wave radar[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 2021: 2983–2986. [54] ZETIK R, RÖDING M, and THOMÄ R S. UWB localization of moving targets in shadowed regions[C]. European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 2012: 1729–1732. [55] JOHANSSON T, ANDERSSON Å, GUSTAFSSON M, et al. Positioning of moving non-line-of-sight targets behind a corner[C]. 2016 European Radar Conference (EuRAD), London, UK, 2016: 181–184. [56] ZHAO Qingsong, CUI Guolong, GUO Shisheng, et al. Millimeter wave radar detection of moving targets behind a corner[C]. 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 2018: 2042–2046. [57] 赵青松. 基于毫米波雷达的隐蔽目标多径探测方法[D]. [硕士论文], 电子科技大学, 2019: 41–59.ZHAO Qingsong. Non-line-of-sight target multipath detection method based on millimeter wave radar[D]. [Master dissertation], University of Electronic Science and Technology of China, 2019: 41–59. [58] GUO Shisheng, ZHAO Qingsong, CUI Guolong, et al. Behind corner targets location using small aperture millimeter wave radar in NLOS urban environment[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 460–470. doi: 10.1109/JSTARS.2020.2963924 [59] WEI Yilin, SUN Bing, ZHOU Yuetong, et al. Non-line-of-sight moving target detection method based on noise suppression[J]. Remote Sensing, 2022, 14(7): 1614. doi: 10.3390/rs14071614 [60] DU Huagui, FAN Chongyi, CAO Chun, et al. A novel NLOS target localization method with a synthetic bistatic MMW radar[C]. 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 2020: 1–5. [61] LI Gen, GE Yun, WANG Yiyu, et al. Detection of human breathing in non-line-of-sight region by using mmWave FMCW radar[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1–11. doi: 10.1109/TIM.2022.3208266 [62] CHEN Jiahui, GUO Shisheng, LUO Haolan, et al. Non-line-of-sight multi-target localization algorithm for driver-assistance radar system[J]. IEEE Transactions on Vehicular Technology, 2023, 72(4): 5332–5337. doi: 10.1109/TVT.2022.3227971 [63] LI Songlin, CUI Guolong, GUO Shisheng, et al. On the electromagnetic diffraction propagation model and applications[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 884–895. doi: 10.1109/JSTARS.2020.2974529 [64] LI Songlin, WANG Yumiao, CUI Guolong, et al. NLOS target localization with a UWB radar[C]. 2019 IEEE Radar Conference (RadarConf), Boston, USA, 2019: 1–5. [65] DU Huagui, FAN Chongyi, CAO Chun, et al. The characteristic analysis and localization application of multipath diffraction signals under a corner[C]. 2020 IEEE 5th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 2020: 665–669. [66] ZETIK R, ESCHRICH M, JOVANOSKA S, et al. Looking behind a corner using multipath-exploiting UWB radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1916–1926. doi: 10.1109/TAES.2015.140303 [67] WU Peilun, GUO Shisheng, JIAN Qiang, et al. Human target localization in the U-shaped structure via UWB radar[C]. International Conference on Autonomous Unmanned Systems, Changsha, China, 2021: 3103–3112. [68] FAN Shihao, WANG Yumiao, CUI Guolong, et al. Moving target localization behind L-shaped corner with a UWB radar[C]. 2019 IEEE Radar Conference (RadarConf), Boston, USA, 2019: 1–5. [69] YANG Xiaoqing, FAN Shihao, GUO Shisheng, et al. NLOS target localization behind an L-shaped corner with an L-band UWB radar[J]. IEEE Access, 2020, 8: 31270–31286. doi: 10.1109/ACCESS.2020.2973046 [70] WU Kewei, FAN Chongyi, HUANG Xiaotao, et al. Multistatic radars locating a human being behind corners based on the method of mirror localization[C]. 8th International Conference on Signal Processing Systems, Auckland, New Zealand, 2016: 110–113. [71] WU Kewei, FAN Chongyi, HUANG Xiaotao, et al. The application of the method of TDOA localization in locating a human being behind corners based on the multistatic radar system[C]. 8th International Conference on Signal Processing Systems, Auckland, New Zealand, 2016: 199–202. [72] 吴科苇. 多基地雷达拐角目标定位误差分析与研究[D]. [硕士论文], 国防科学技术大学, 2016: 50–64.WU Kewei. Research on localization error around the corner in multistatic radar system[D]. [Master dissertation], National University of Defense Technology, 2016: 50–64. [73] DING Rui, WANG Zhuang, JIANG Libing, et al. A target localisation method with monostatic radar via multi‐observation data association[J]. IET Radar, Sonar & Navigation, 2023, 17(1): 99–116. doi: 10.1049/rsn2.12327 [74] THAI K P H, RABASTE O, BOSSE J, et al. Around-the-corner radar: Detection and localization of a target in non-line of sight[C]. 2017 IEEE Radar Conference (RadarConf), Seattle, USA, 2017: 842–847. [75] THAI K P H, RABASTE O, BOSSE J, et al. Detection-localization algorithms in the around-the-corner radar problem[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(6): 2658–2673. doi: 10.1109/TAES.2019.2897031 [76] THAI K P H, RABASTE O, BOSSE J, et al. GLRT particle filter for tracking NLOS target in around-the-corner radar[C]. 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, Canada, 2018: 3216–3220. [77] WU Peilun, CHEN Jiahui, GUO Shisheng, et al. NLOS positioning for building layout and target based on association and hypothesis method[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 1–13. doi: 10.1109/TGRS.2023.3250831 [78] CHEN Jiahui, ZHANG Yang, GUO Shisheng, et al. Joint estimation of NLOS building layout and targets via sparsity-driven approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1–13. doi: 10.1109/TGRS.2022.3182429 [79] LIU Xinyuan, WEI Shunjun, WEI Jinshan, et al. Non-line-of-sight radar 3-D imaging via sparse reconstruction[C]. 2021 7th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Bali, Indonesia, 2021: 1–4. [80] WEI Shunjun, WEI Jinshan, LIU Xinyuan, et al. Nonline-of-sight 3-D imaging using millimeter-wave radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1–18. doi: 10.1109/TGRS.2021.3112579 [81] CUI Yiran and TRICHOPOULOS G C. 3D non-line-of-sight terahertz imaging using mirror folding[C]. 2022 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Boulder, USA, 2022: 89–90. [82] CUI Yiran and TRICHOPOULOS G C. Seeing around obstacles with terahertz waves[EB/OL]. https://arxiv.org/abs/2205.05066, 2022. [83] SOLOMITCKII D, BARNETO C B, TURUNEN M, et al. Millimeter-wave automotive radar scheme with passive reflector for blind corner conditions[C]. 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 2020: 1–5. [84] SOLOMITCKII D, HEINO M, BUDDAPPAGARI S, et al. Radar scheme with raised reflector for NLOS vehicle detection[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9037–9045. doi: 10.1109/TITS.2021.3090313 [85] SOLOMITCKII D, BARNETO C B, TURUNEN M, et al. Millimeter-wave radar scheme with passive reflector for uncontrolled blind urban intersection[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 7335–7346. doi: 10.1109/TVT.2021.3093822 [86] AUBRY A, DE MAIO A, and ROSAMILIA M. Reconfigurable intelligent surfaces for N-LOS radar surveillance[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 10735–10749. doi: 10.1109/TVT.2021.3102315 [87] WOODFORD T, ZHANG Xinyu, CHAI E, et al. Mosaic: Leveraging diverse reflector geometries for omnidirectional around-corner automotive radar[C]. 20th Annual International Conference on Mobile Systems, Applications and Services, Portland, USA, 2022: 155–167. [88] REZVANI B, HASSIBI B, BRÄNNSTRÖM F, et al. Letting robocars see around corners: Using several bands of radar at once can give cars a kind of second sight[J]. IEEE Spectrum, 2022, 59(2): 36–41. doi: 10.1109/MSPEC.2022.9706401 [89] YUE Shichao, HE Hao, CAO Peng, et al. CornerRadar: RF-based indoor localization around corners[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2022, 6(1): 1–24. doi: 10.1145/3517226 [90] SCHEINER N, KRAUS F, WEI Fangyin, et al. Seeing around street corners: Non-line-of-sight detection and tracking in-the-wild using doppler radar[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 2065–2074. -








图(28) / 表(2)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

