
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Overview of Signal Processing Techniques for Automotive Millimeter-wave Radar(in English)
-
摘要:
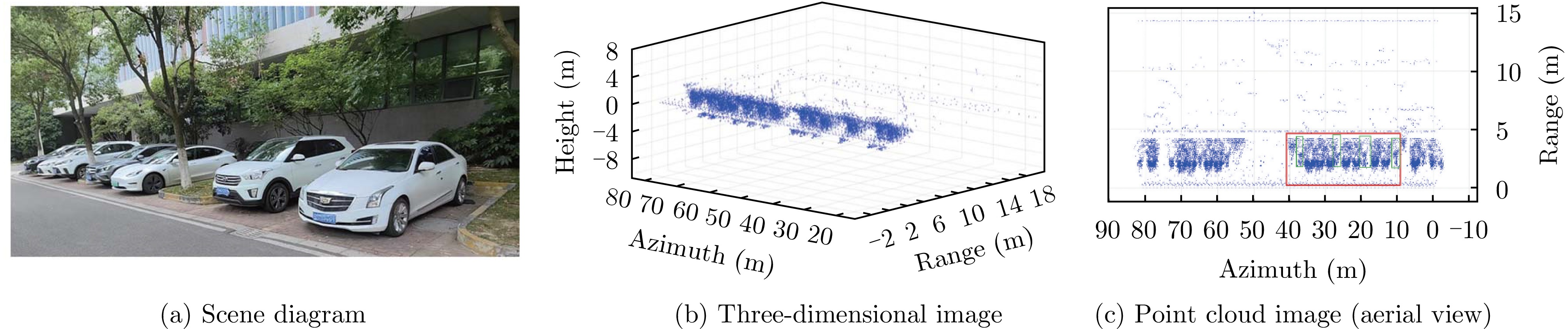
作为高级驾驶辅助系统(ADAS)核心之一的汽车毫米波雷达因其具有全天时、全天候、小型化、集成度高等优势,提供了关键的感知能力,逐渐成为国内外学者及厂商关注的焦点。汽车毫米波雷达以汽车作为平台,其核心性能指标主要有距离、速度、角度分辨率、视场范围等,此外,精度、成本、实时性、检测性能和体积也是需要考虑的关键问题。日益提升的性能需求给汽车毫米波雷达信号处理带来了诸多挑战。为了改进雷达性能以满足更严格的要求,雷达的信号处理技术是至关重要的一环。获取致密的雷达点云、生成精确的雷达成像结果、对抗多个雷达系统间的相互干扰是其中的重点,也是后续跟踪、识别等应用的基础。因此,该文从汽车毫米波雷达的实际应用出发,立足于信号处理的关键技术,总结了相关研究成果,主要讨论与车载毫米波雷达相关的以下主题: (1)点云成像处理;(2)合成孔径雷达成像处理;(3)互扰抑制。文章最后对国内外研究现状进行了总结,并展望未来汽车毫米波雷达的发展趋势,希望能给相关领域读者以启发。
Abstract:As one of the core components of Advanced Driver Assistance Systems (ADAS), automotive millimeter-wave radar has become the focus of scholars and manufacturers at home and abroad because it has the advantages of all-day and all-weather operation, miniaturization, high integration, and key sensing capabilities. The core performance indicators of the automotive millimeter-wave radar are distance, speed, angular resolution, and field of view. Accuracy, cost, real-time and detection performance, and volume are the key issues to be considered. The increasing performance requirements pose several challenges for the signal processing of millimeter-wave radar systems. Radar signal processing technology is crucial for improving radar performance to meet more stringent requirements. Obtaining dense radar point clouds, generating accurate radar imaging results, and mitigating mutual interference among multiple radar systems are the key points and the foundation for subsequent tracking, recognition, and other applications. Therefore, this paper discusses the practical application of the automotive millimeter-wave radar system based on the key technologies of signal processing, summarizes relevant research results, and mainly discusses the topics of point cloud imaging processing, synthetic aperture radar imaging processing, and interference suppression. Finally, herein, we summarize the research status at home and abroad. Moreover, future development trends for automotive millimeter-wave radar systems are forecast with the hope of enlightening readers in related fields.
-

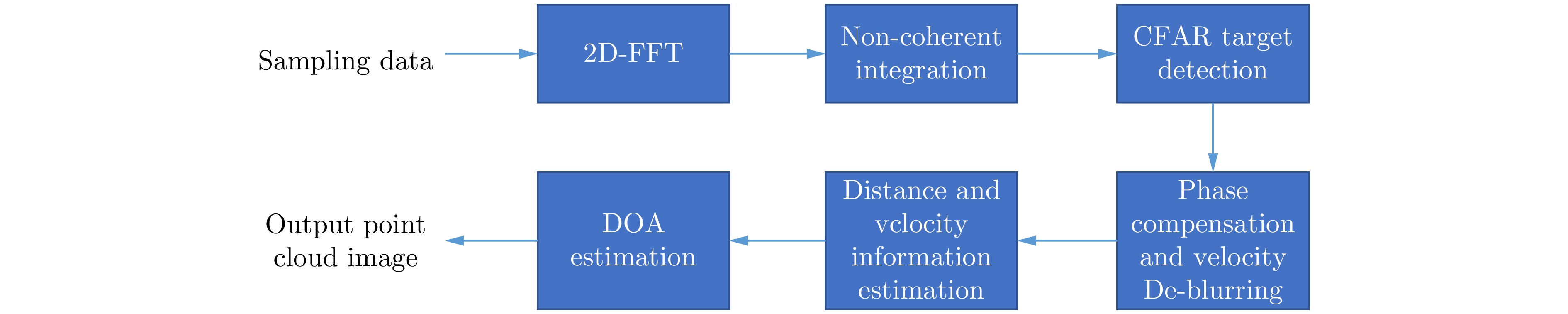
图 1 毫米波雷达点云成像算法处理流程
Figure 1. The processing flow of millimeter-wave radar point cloud imaging algorithm
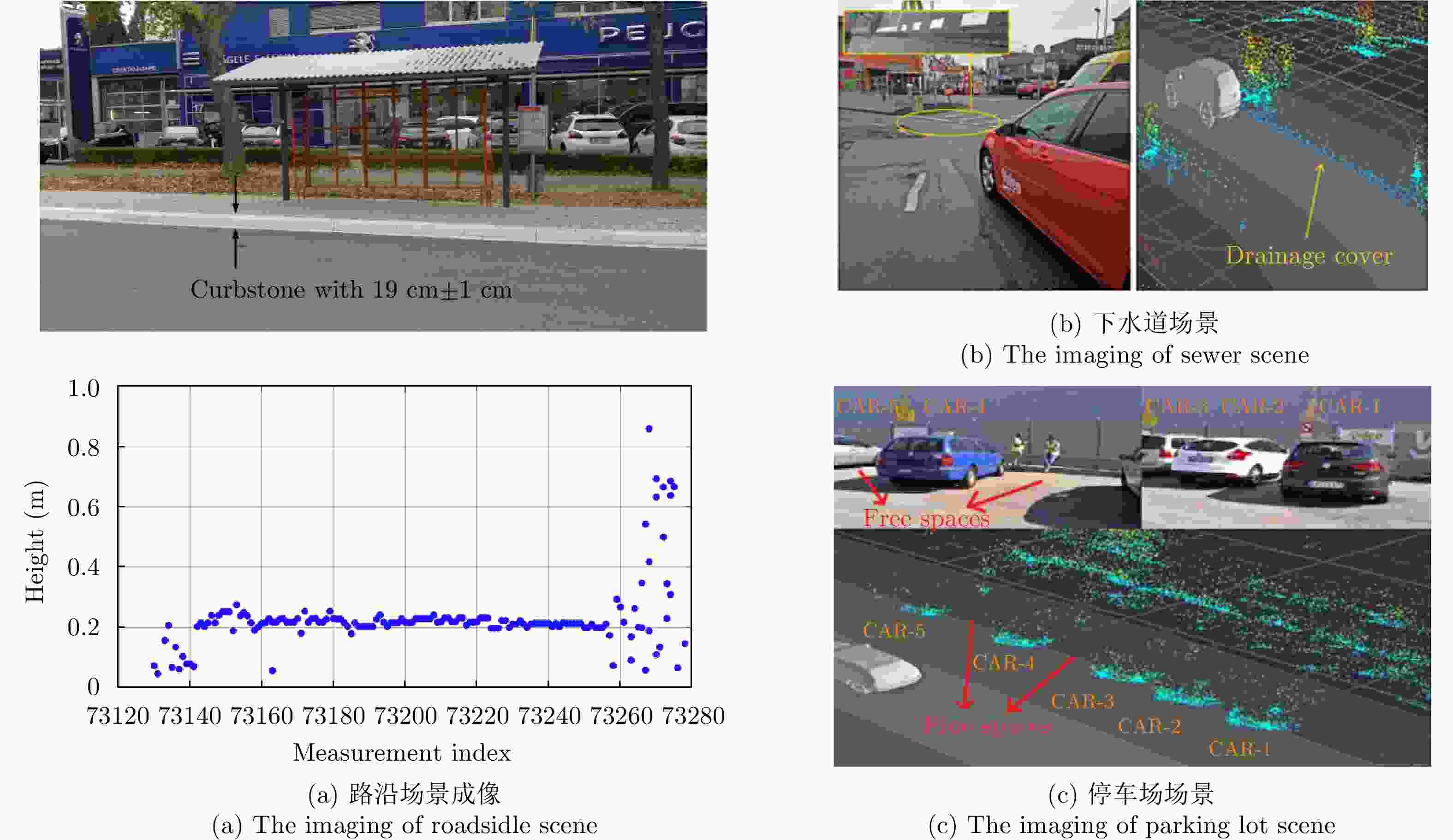

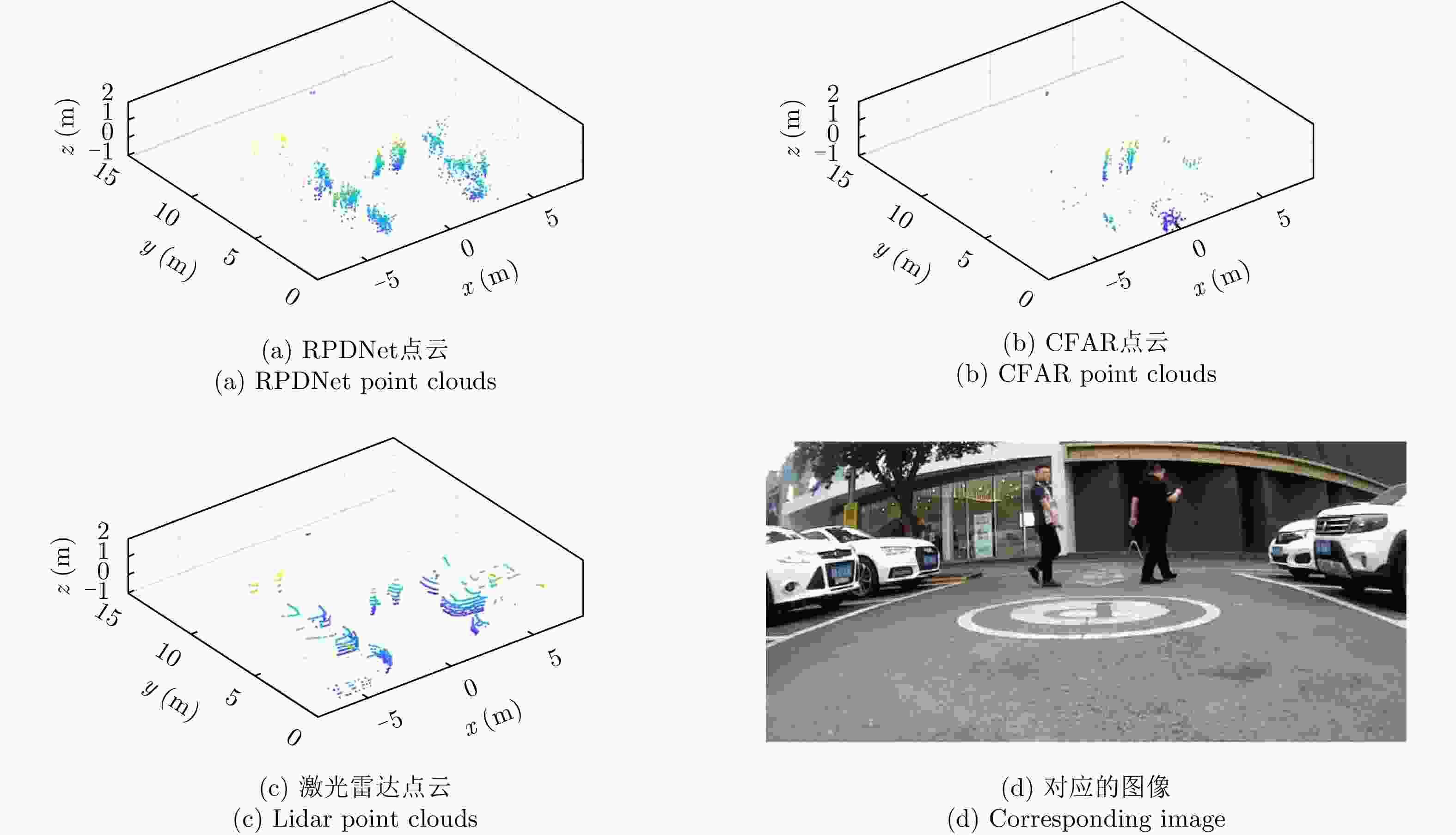

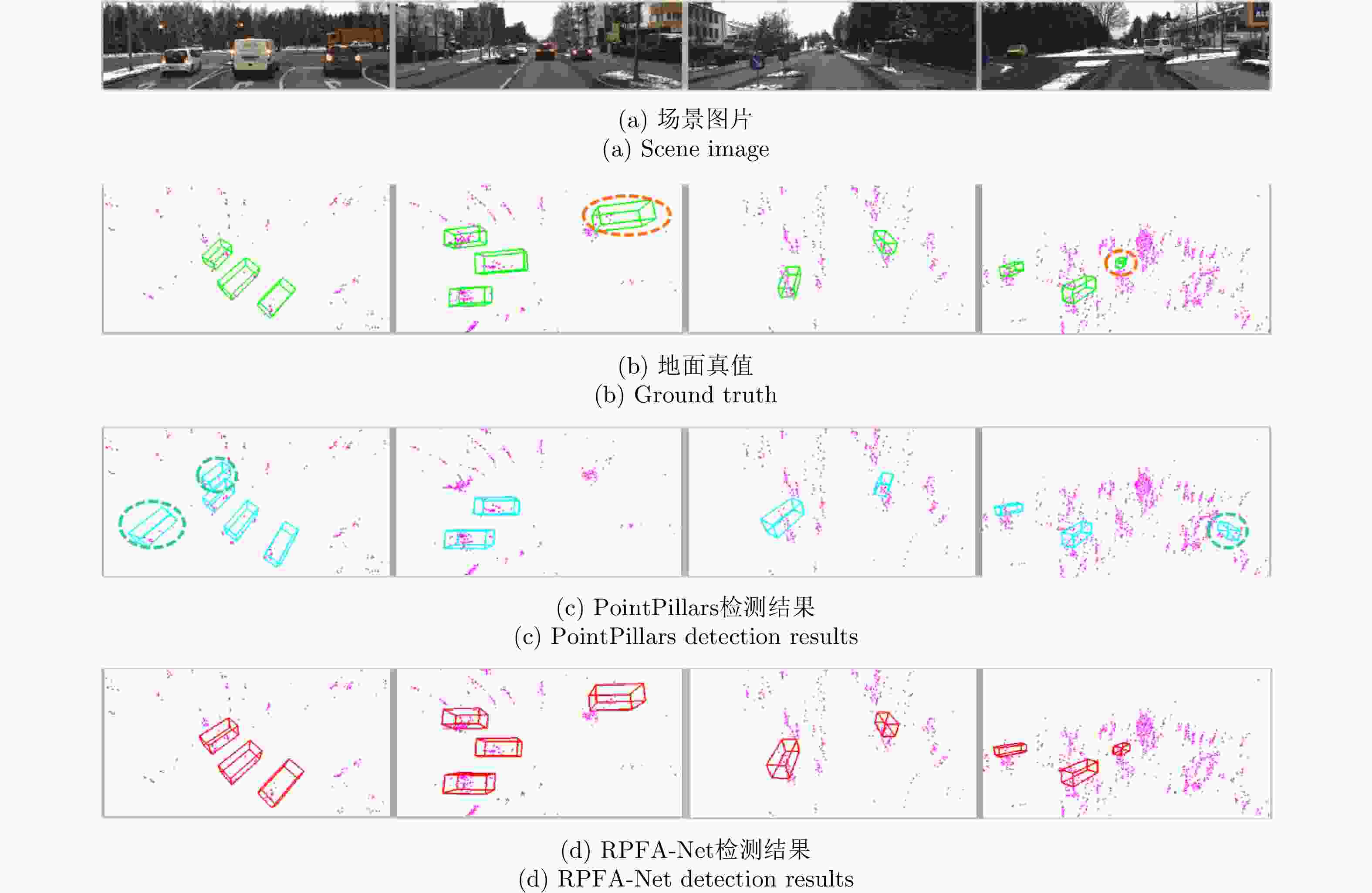
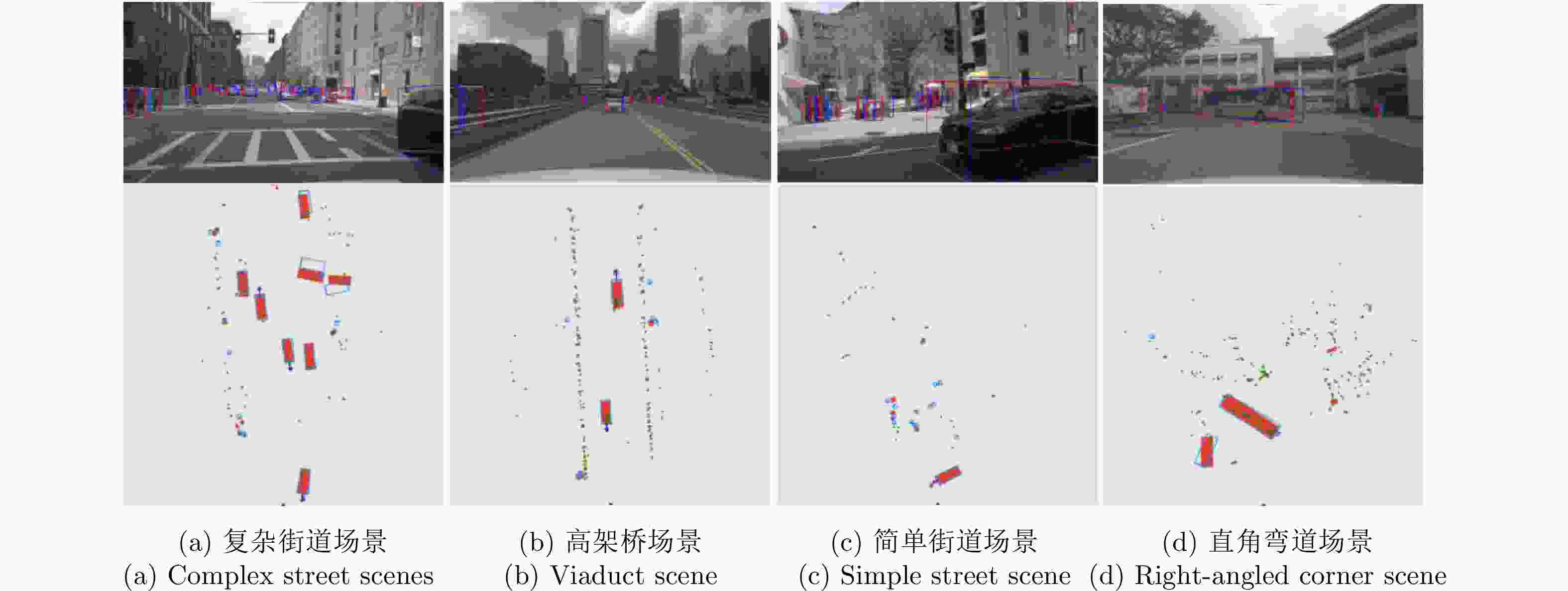

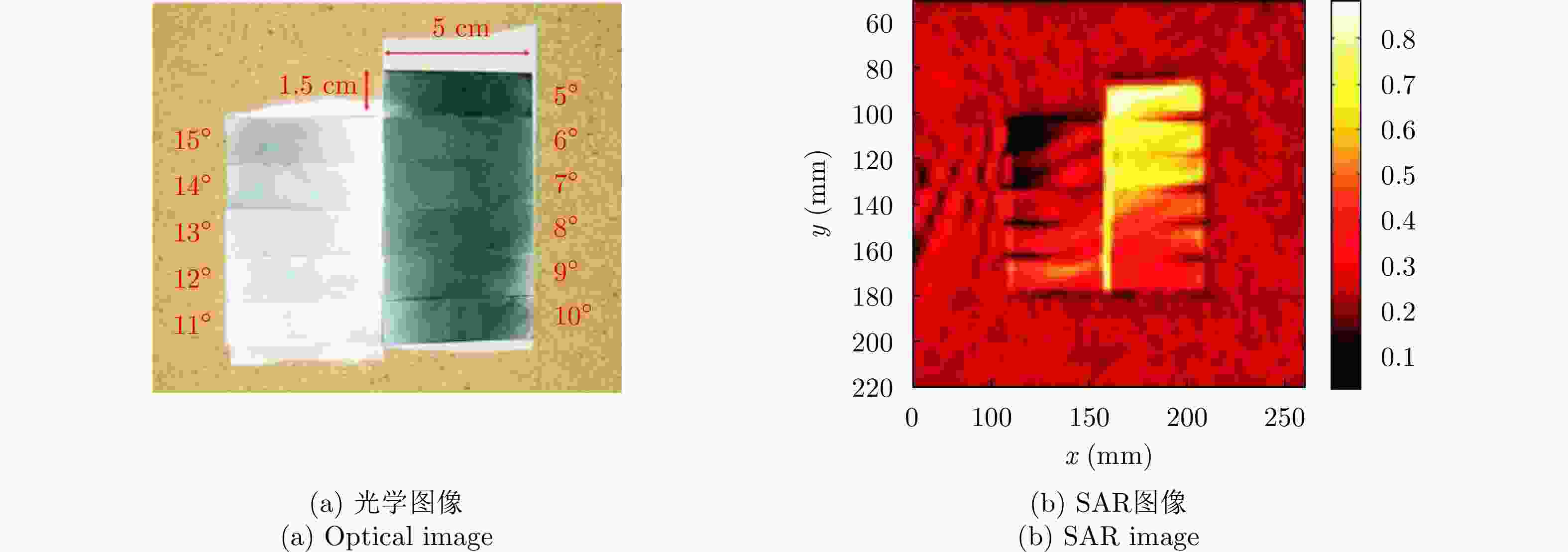
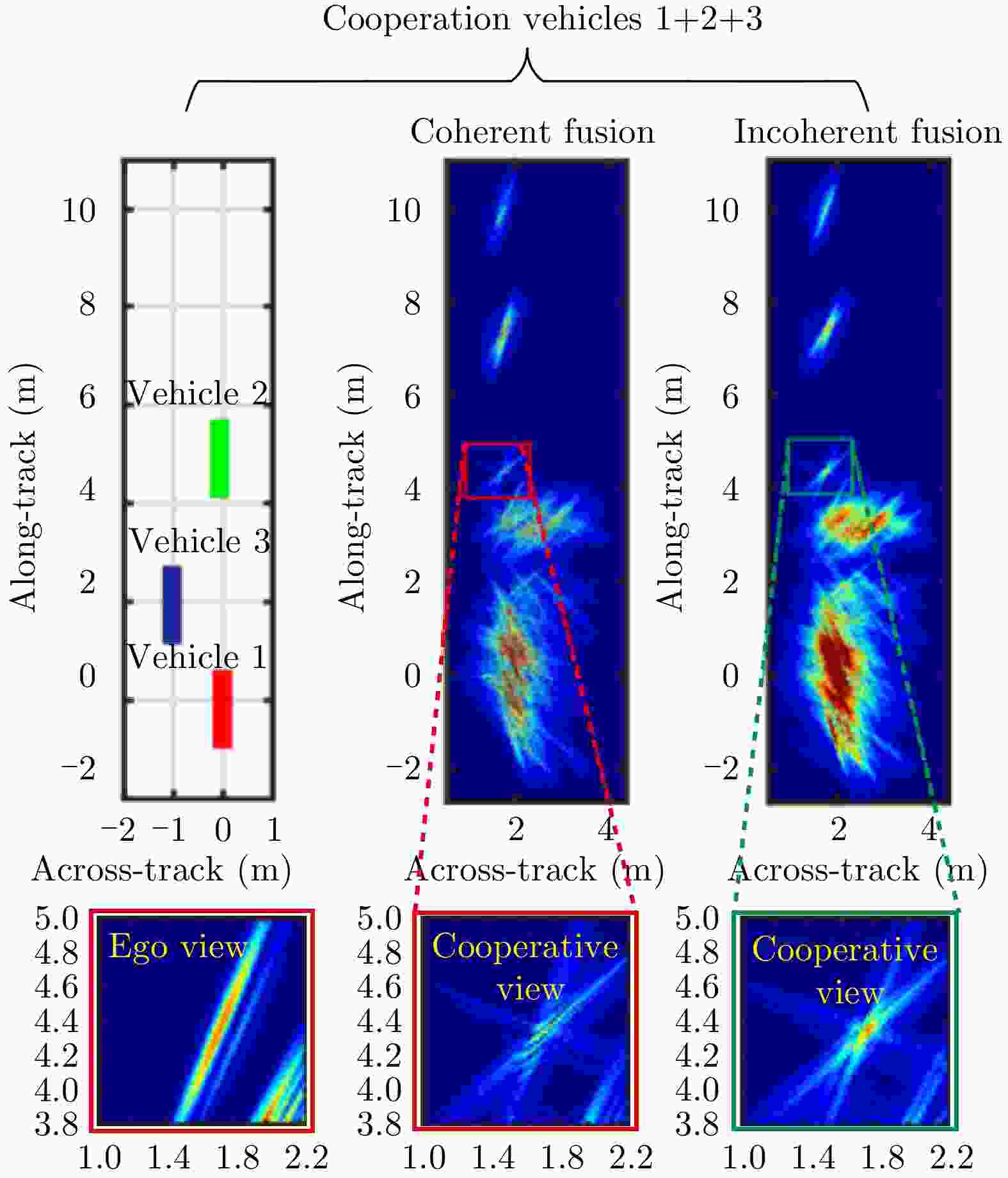

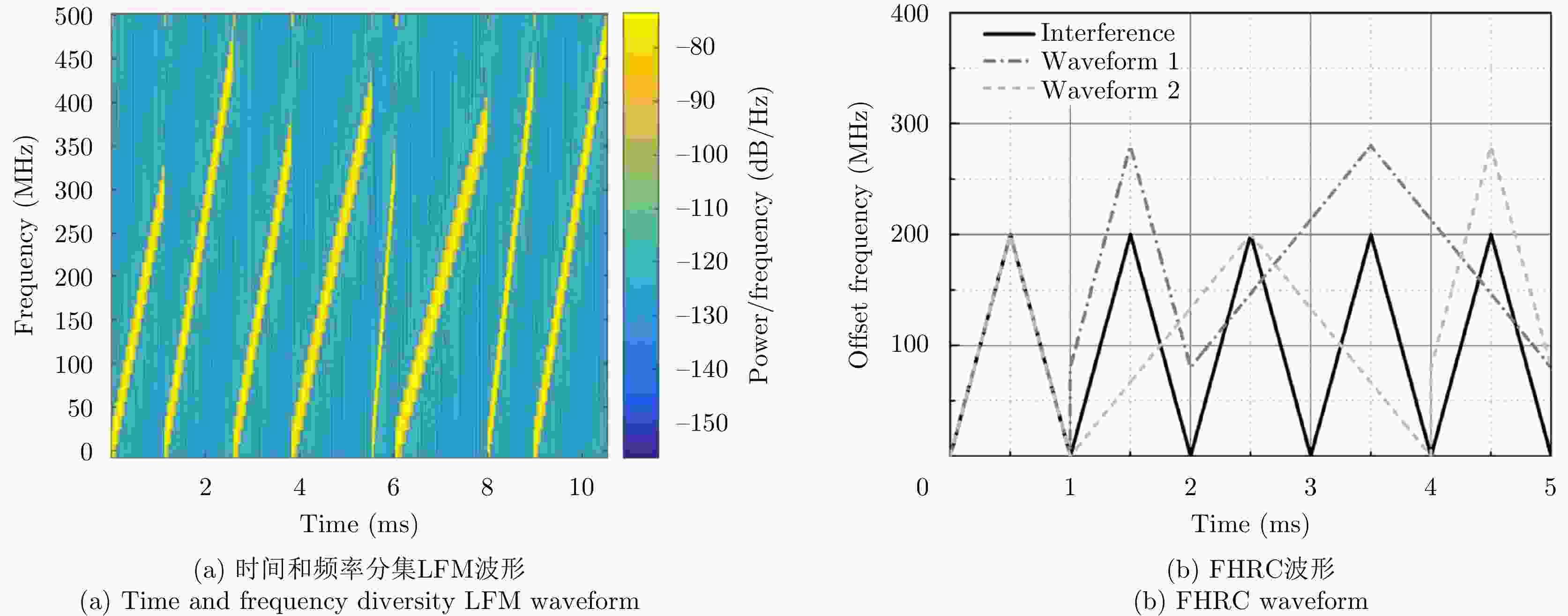
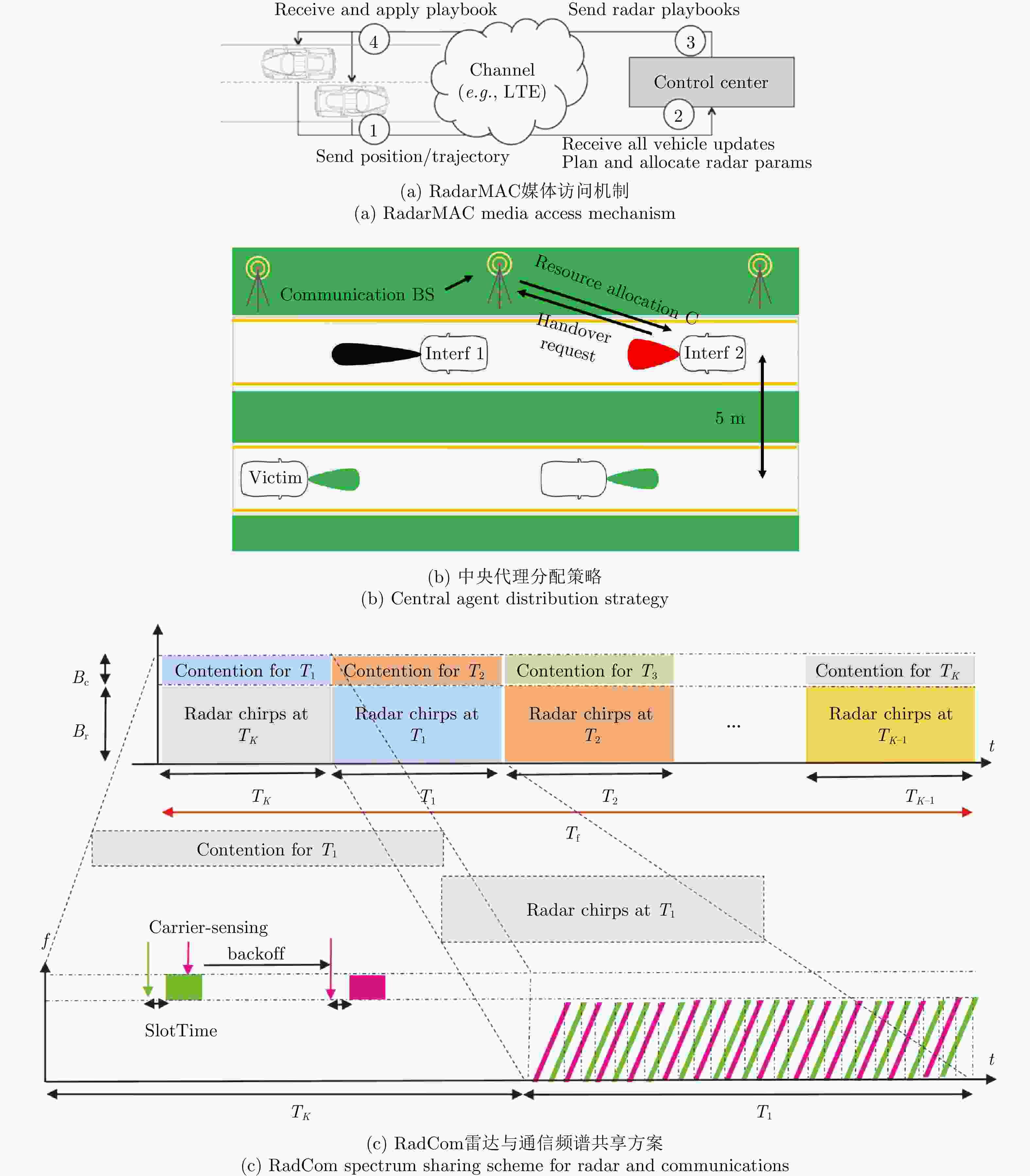

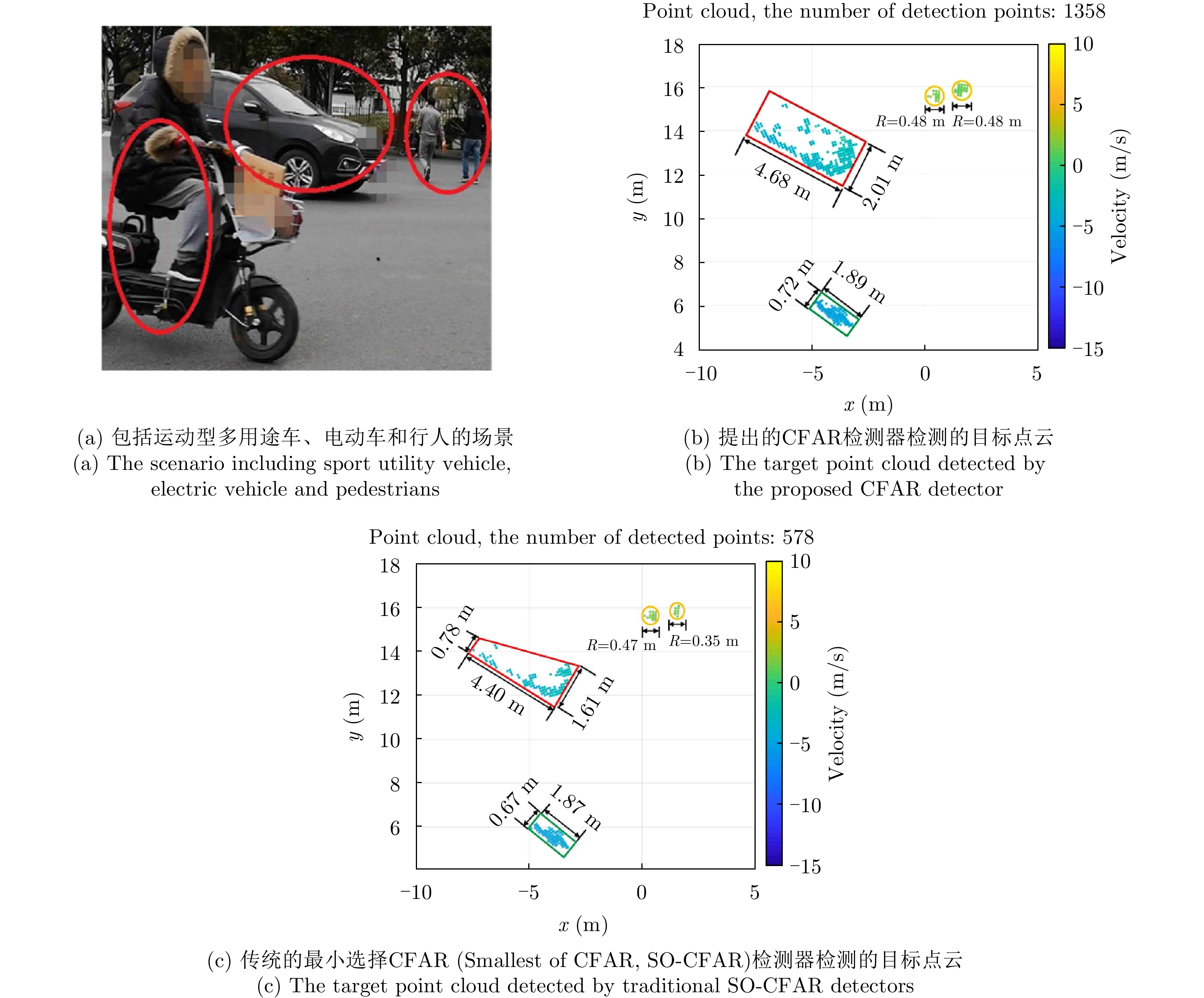
图 4 Comparison of the number of point clouds generated by the PreCFAR method proposed in Ref. [ 7] and the traditional SO-CFAR method

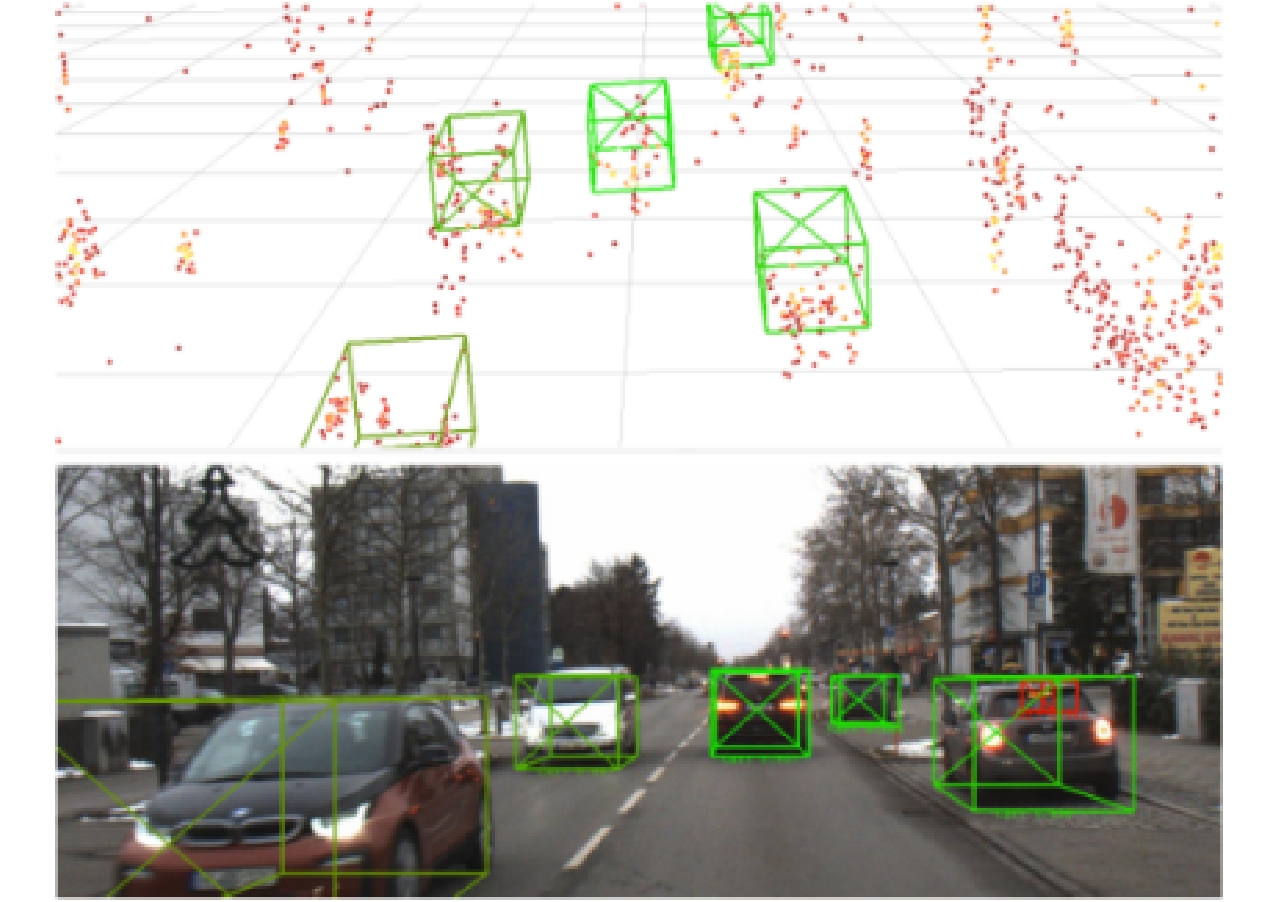
图 13 3D detection in different scenarios results of CenterFusion [ 39] on the NuScenes dataset

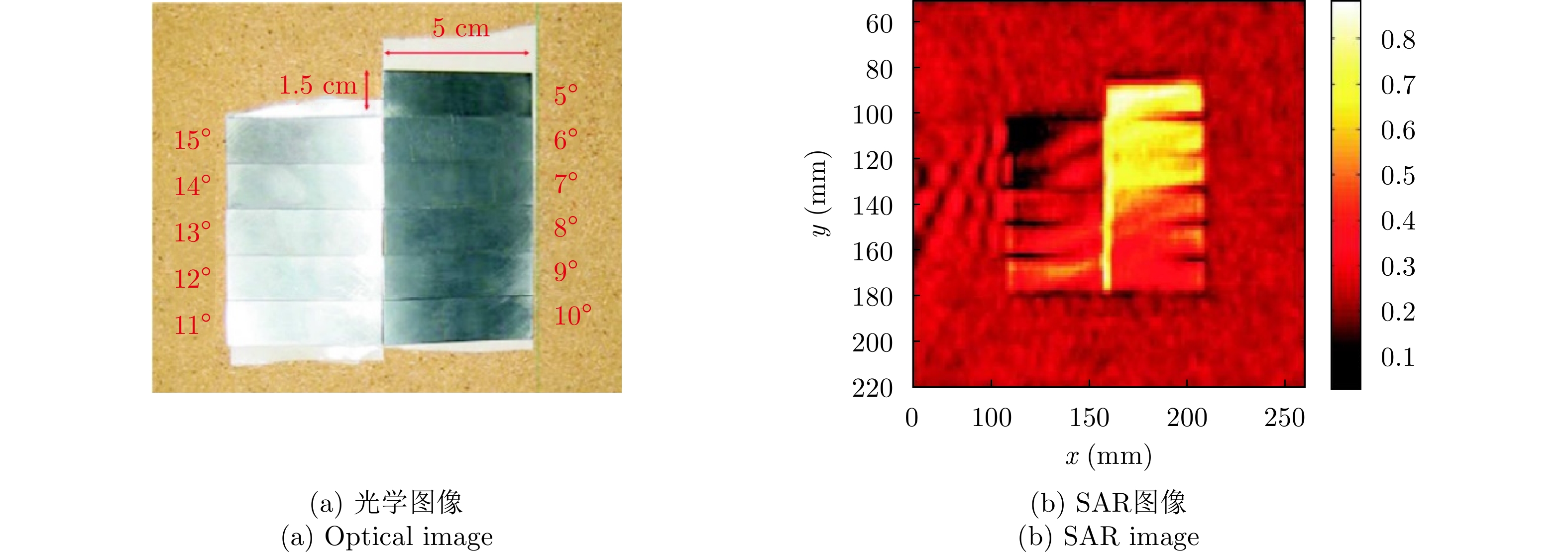
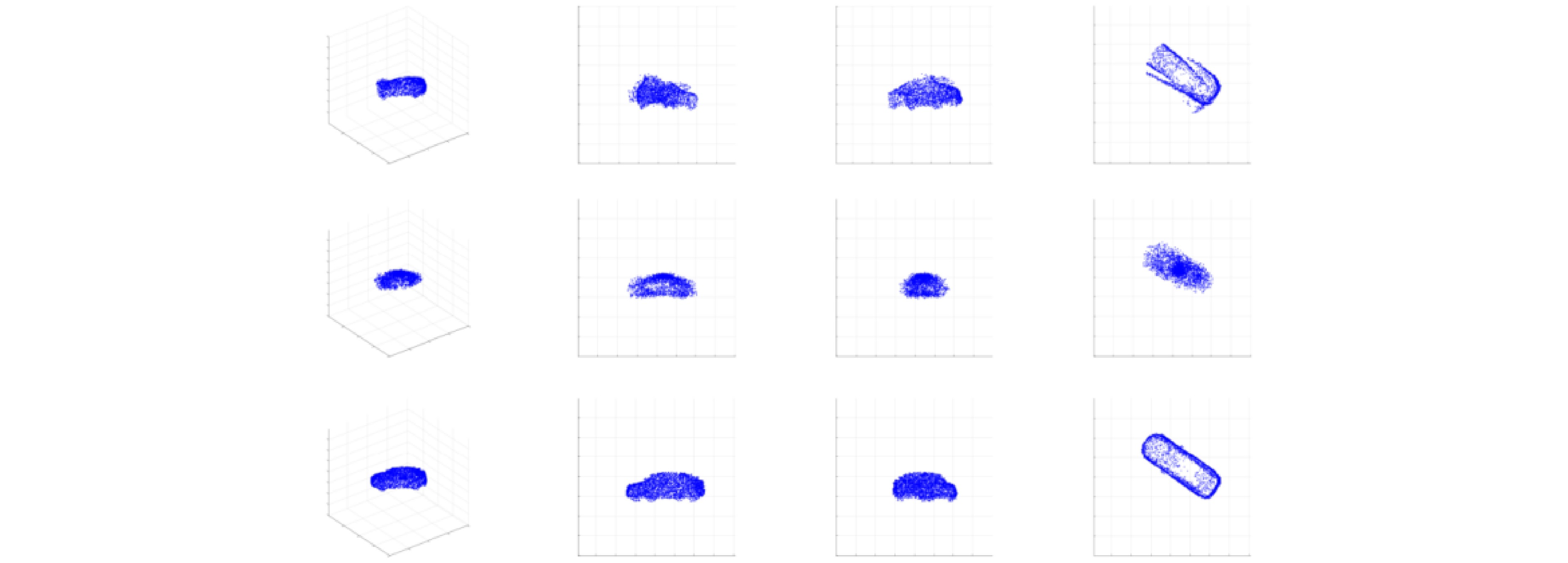
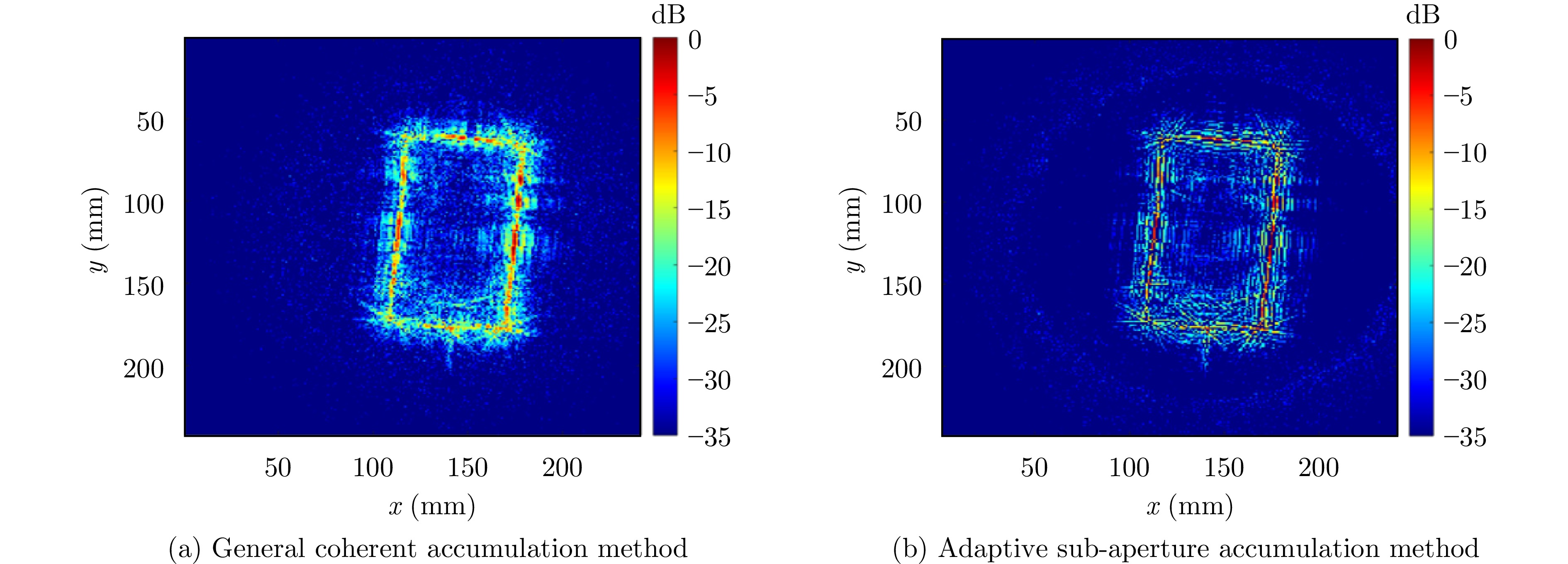
图 19 94 GHz MMW SAR imaging results of polyethylene cylinders with different tilting degrees [ 55]

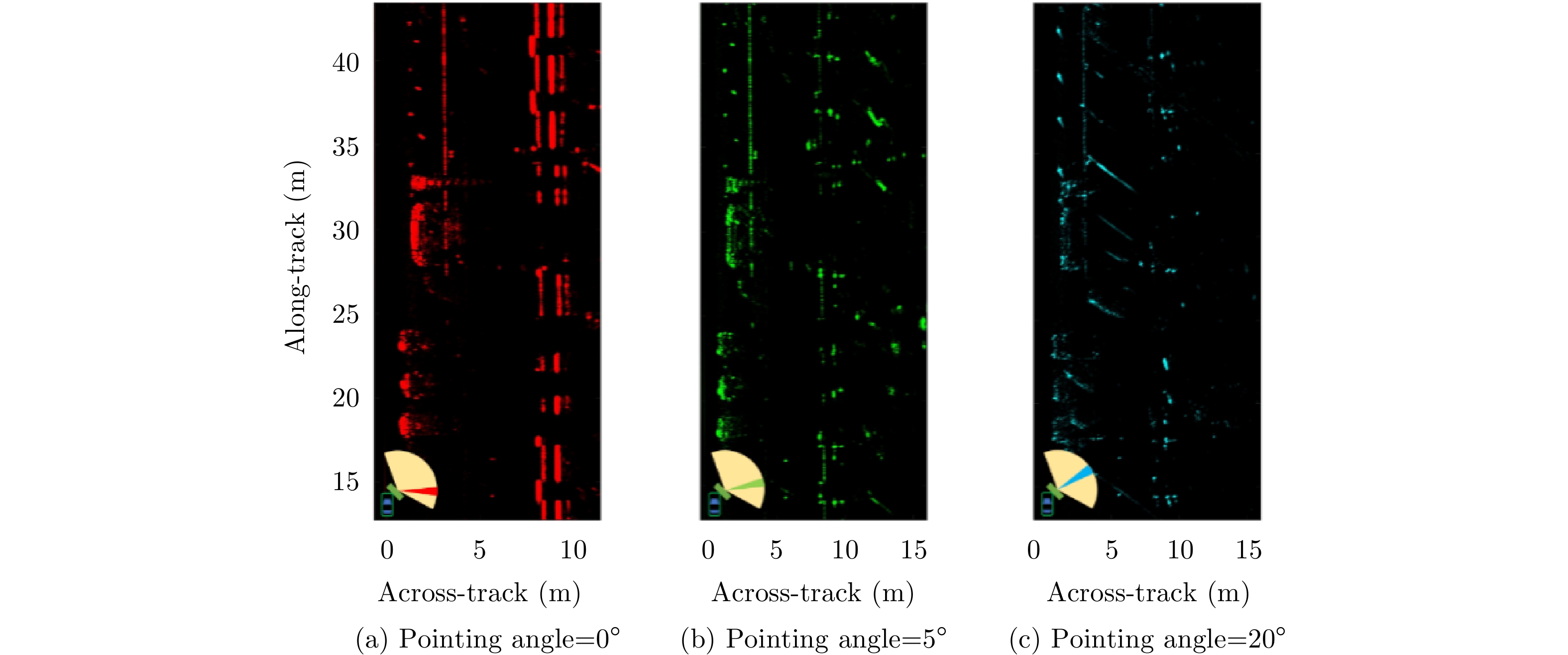
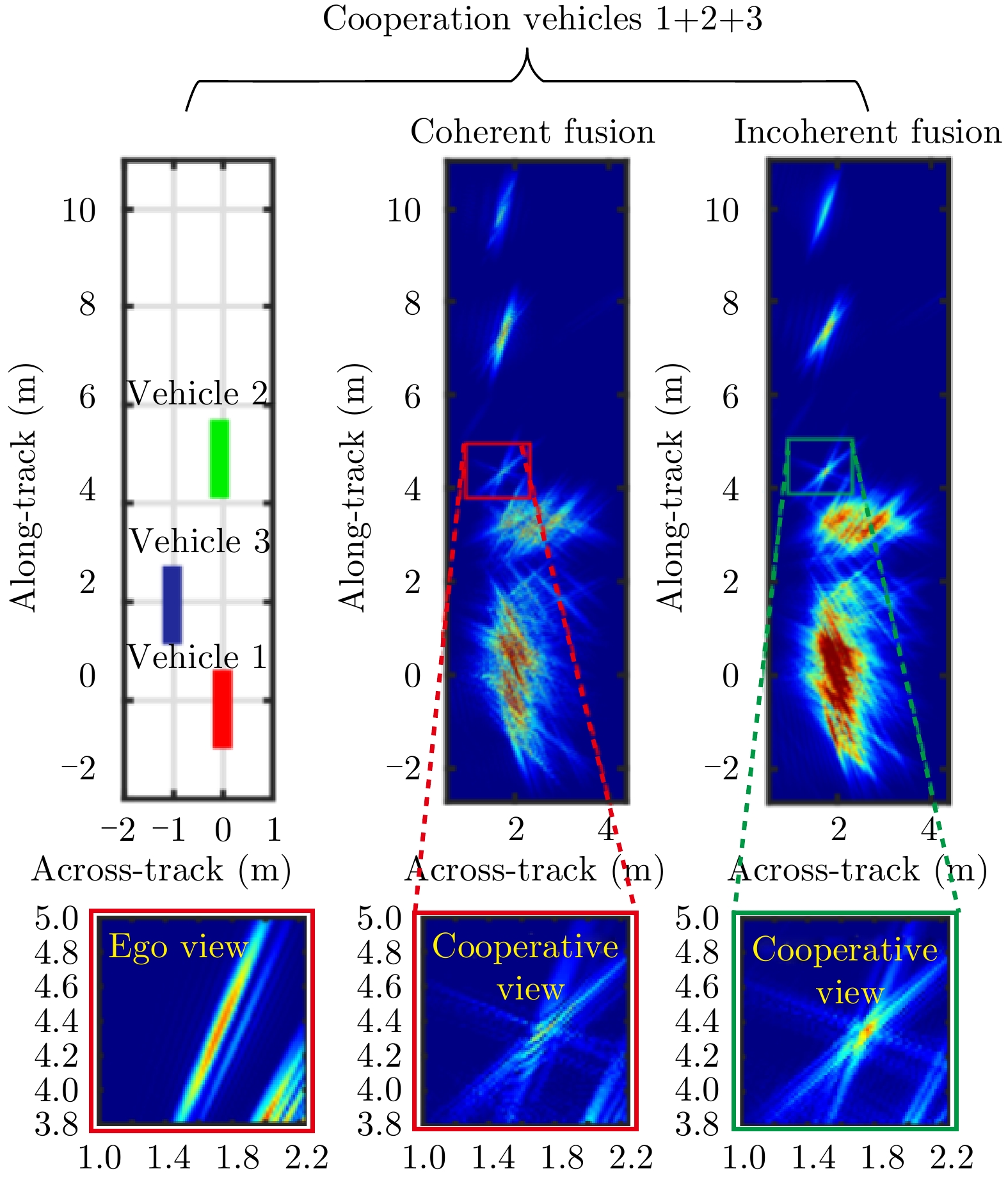
图 28 Comparison of the improvement in range-direction resolution in multi-vehicle collaboration [ 67]
表 1 基于信号处理方法实现点云成像相关论文汇总
Table 1. Summary of relevant papers of realization of point cloud imaging based on signal processing
作者 特点 雷达参数 效果 Li等人[2] BPSK-MIMO雷达 雷达工作频率为79 GHz,带宽为1.6 GHz 能对路沿、排水渠、停车场等场景成像,
具备一定的测高能力Qian等人[3] 基于SAR成像的汽车
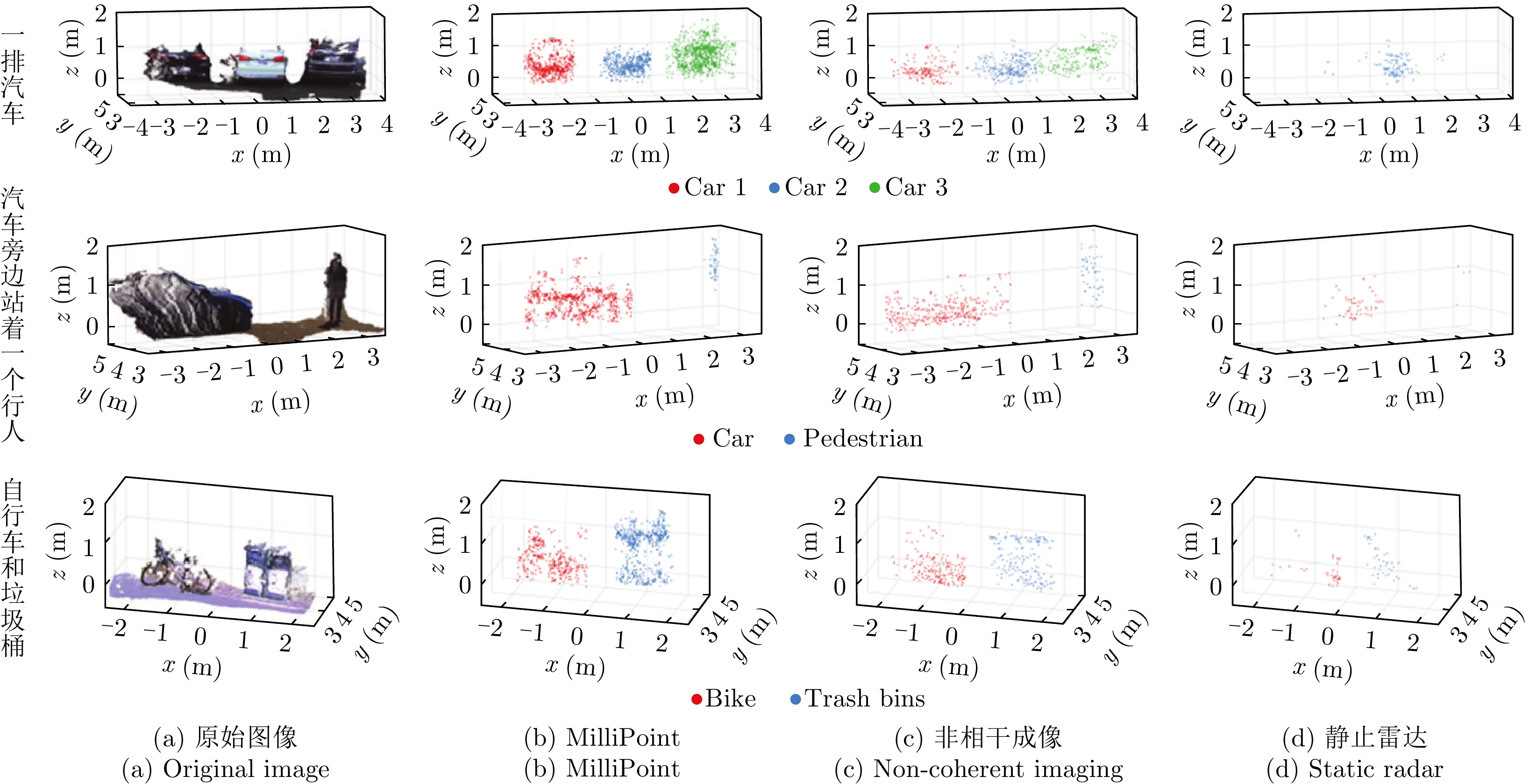
雷达系统MilliPoint两片级联,6发8收的天线阵列,距离分辨率为0.044 m,最大探测距离11.31 m 对目标构建出密度和分辨率更高的三维点云 Engels
等人[4]高性能4片芯片级联雷达板 AWR2243,距离分辨率0.2 m,速度分辨率
0.1 m/s,方位角分辨率约等于1.4°,
俯仰角分辨率<3°在高速路场景下实现了目标检测,并验证了
雷达在恶劣工作环境的工作性能林凤泰等人[5] 提出基于最近迭代点的
多帧融合算法AWR2243,距离分辨率0.059 m,速度分辨率
0.055 m/s,角度分辨率1.4°使用多帧融合算法和自适应邻域半径DBSCAN
聚类算法得到场景相对稠密的点云数据Weishaupt
等人[6]提出了PreCFAR方法 雷达中心频率78 GHz,距离分辨率0.075 m,
速度分辨率0.15 m/s,角度分辨率3°改进了CFAR目标检测算法 Wei等人[7] 提出了Area-Based CFAR方法 文章未提及 大大提升了CFAR检测器性能,生成了
更为密集的点云图像兰吕鸿康
等人[8]提出CFAR算法中门限系数
自适应设置方法AWR2243,距离分辨率0.15 m,方位角度
分辨率1.4°,俯仰角度分辨率18°生成了较为致密可信的毫米波雷达三维点云图像  下载: 导出CSV
下载: 导出CSV
表 2 基于深度学习方法实现点云处理相关论文汇总
Table 2. Summary of relevant papers of realization of point cloud processing based on deep learning
作者 特点 效果 Danzer等人[9] 将PointNets应用于二维雷达数据 对车辆进行了检测、分类和二维边界盒估计 Jin等人[10] 使用GMM进行雷达点云分割 GMM方法简单,对行人分类效果较好,
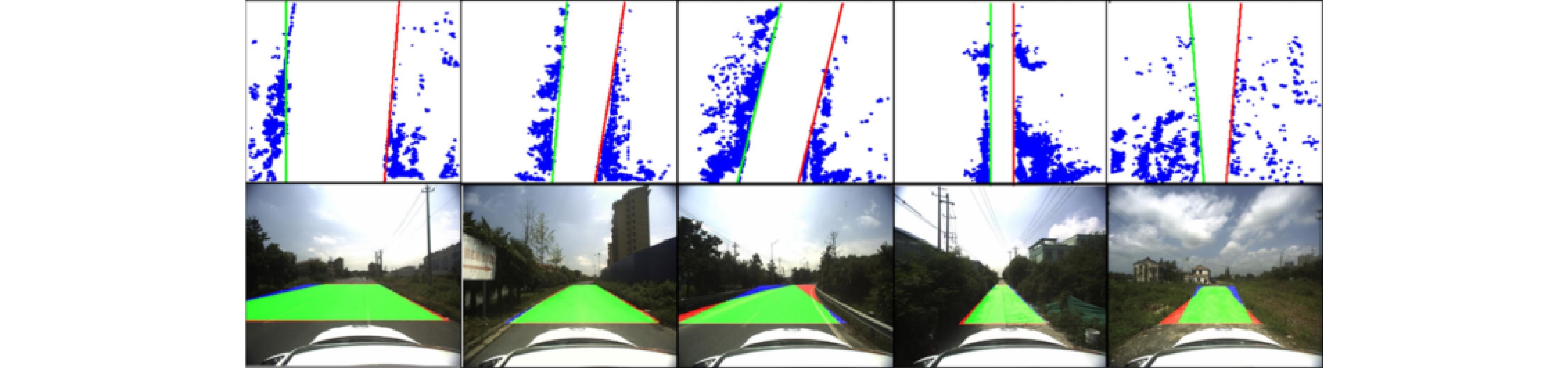
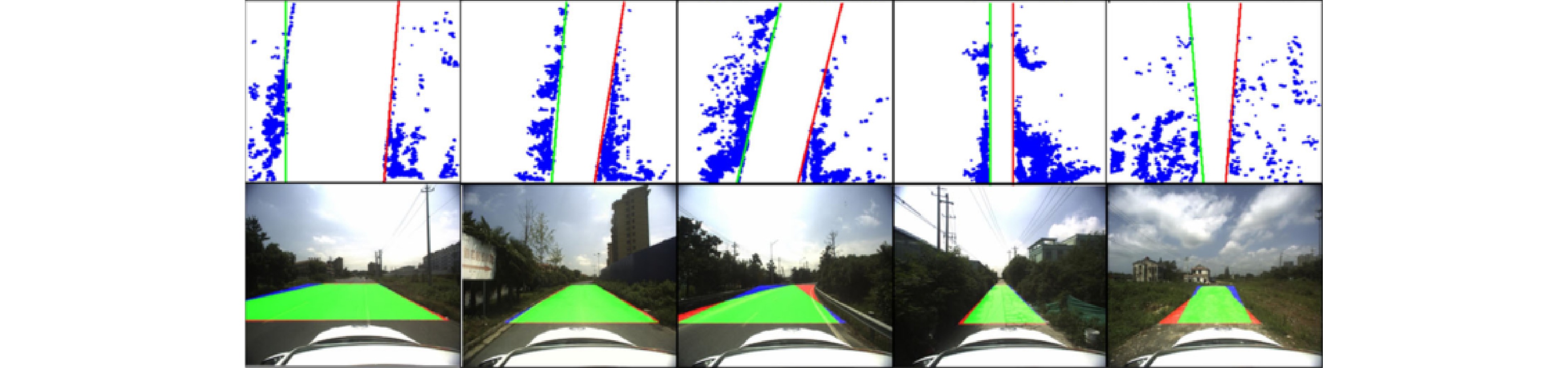
而对车辆分类效果较差Xu等人[11] 提出RANSAC算法实现道路边界估计 实现了距离雷达30 m之内的道路边界检测,精度达81.89% Jin等人[12] 提出了基于雷达点云数据的自动驾驶道路路线估计算法 所提方法的估计精度要优于基于网格图的CNN Cheng等人[13,14] 提出了基于激光雷达数据自动生成标签方法的
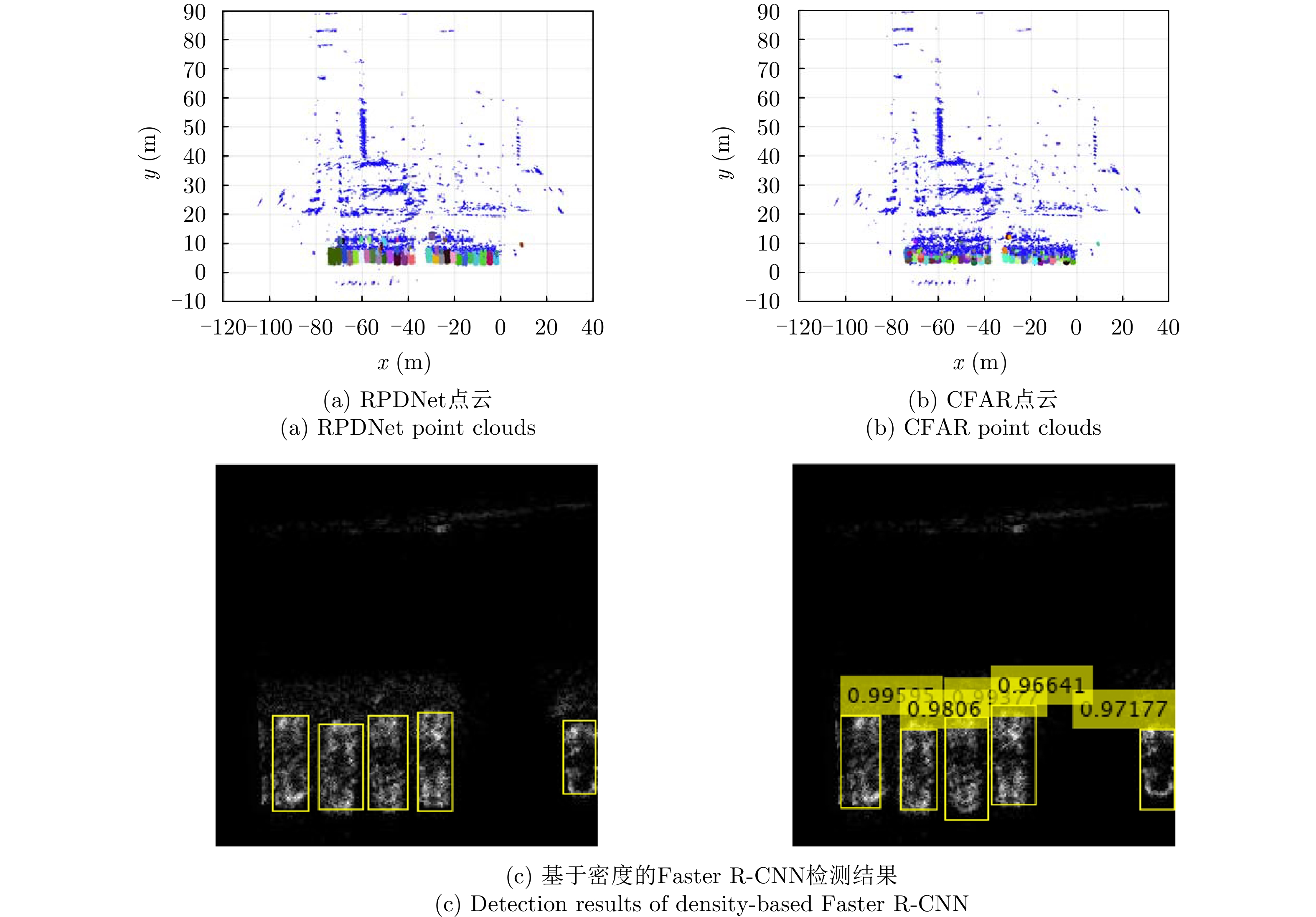
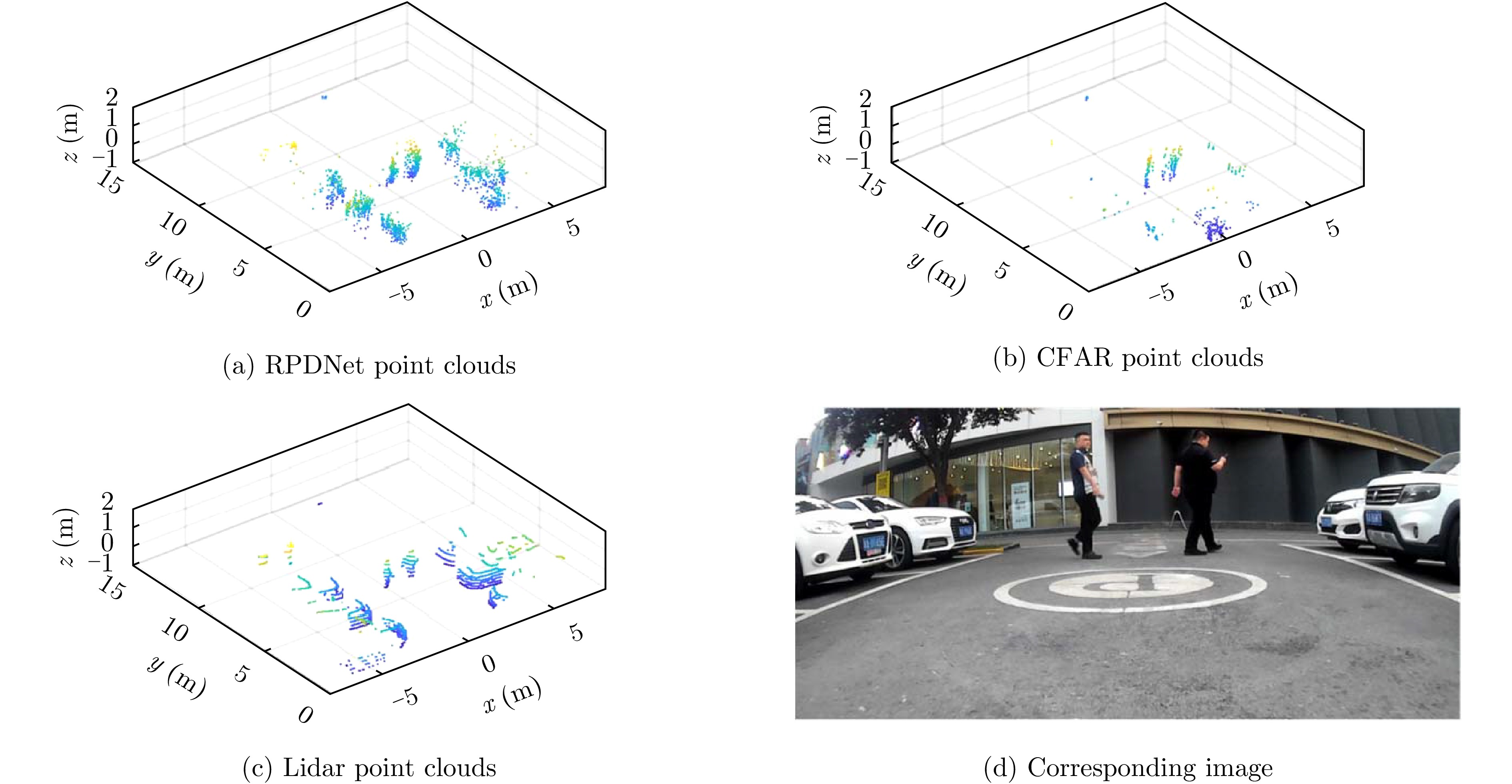
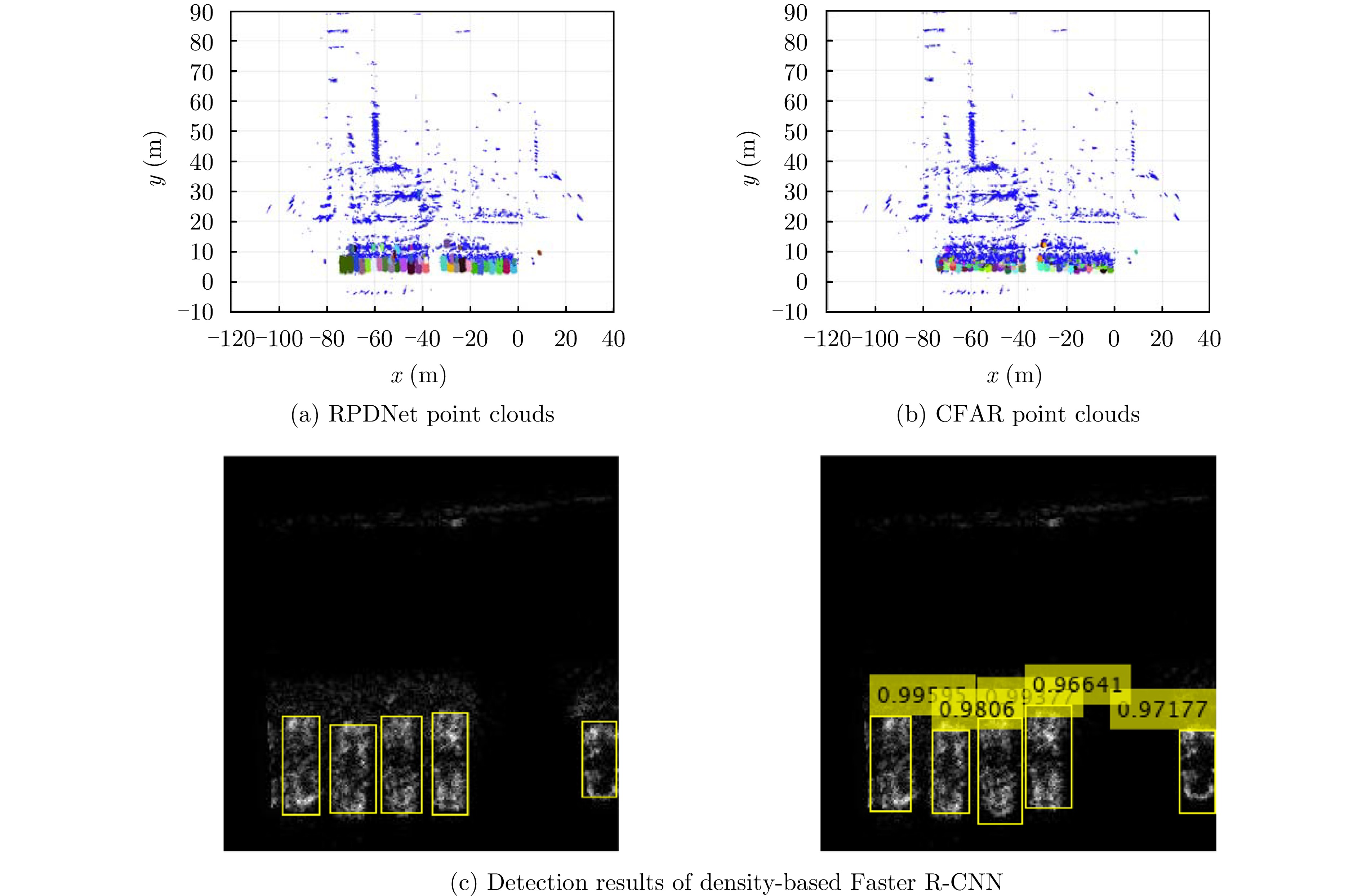
3D点云检测器RPDNet相较于CFAR检测器,RPDNet在抑制雷达杂波和
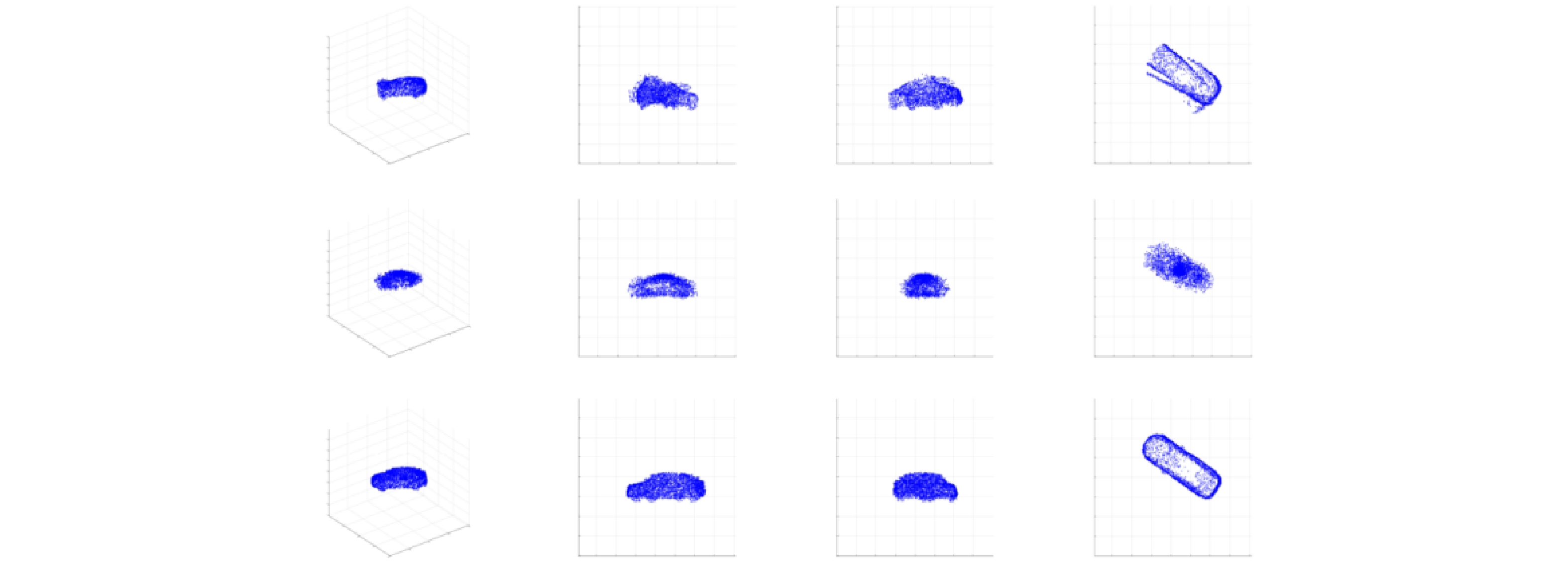
生成更密集点云方面具有更好的性能Jiang等人[15] 提出了CV-DCN 使用深度学习实现了单帧雷达数据角度超分辨 Franceschi等人[16] 采用两层级联神经网络架构替代CFAR和DOA估计 相较于传统的雷达信号处理方法生成更为密集的3D点云图像 Tan等人[17] 提出了一种用于目标检测的多帧毫米波雷达点云检测框架 多个实际道路场景下实现了对车辆的检测和识别 Sun等人[18,19] 提出了基于深度学习的神经网络架构3DRIMR 基于稀疏的原始毫米波雷达数据,以密集的点云形式
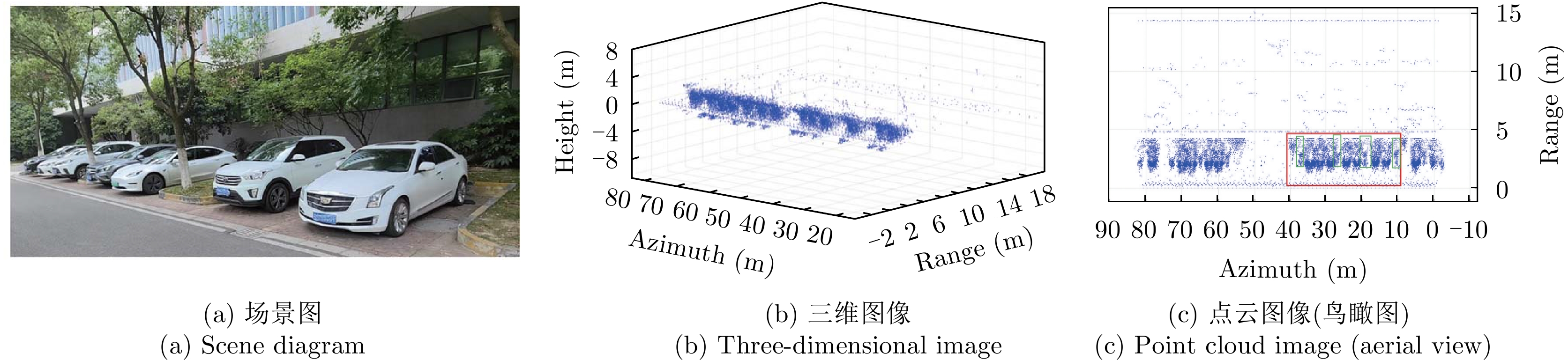
重建物体的三维形状Huang等人[20] 提出了基于密度的DBSCAN算法和Faster R-CNN网络 实现了停车场场景下的车辆检测,平均检测精度达96.95% Dreher等人[21] 对比基于网格和基于点云的目标检测方法 基于网格的方法效率更高,但在密集城市交通情况的条件下,
基于点云的网络实现了更好的检测性能Xu等人[22] 提出了RPFA-Net 显著提高网络回归航向角估计和三维目标检测的精度
下载: 导出CSV
表 3 基于数据级融合方法实现成像处理相关论文汇总
Table 3. Summary of image processing papers based on data-level fusion method
下载: 导出CSV
表 4 基于特征级融合方法实现成像处理相关论文汇总
Table 4. Summary of image processing papers based on feature-level fusion method
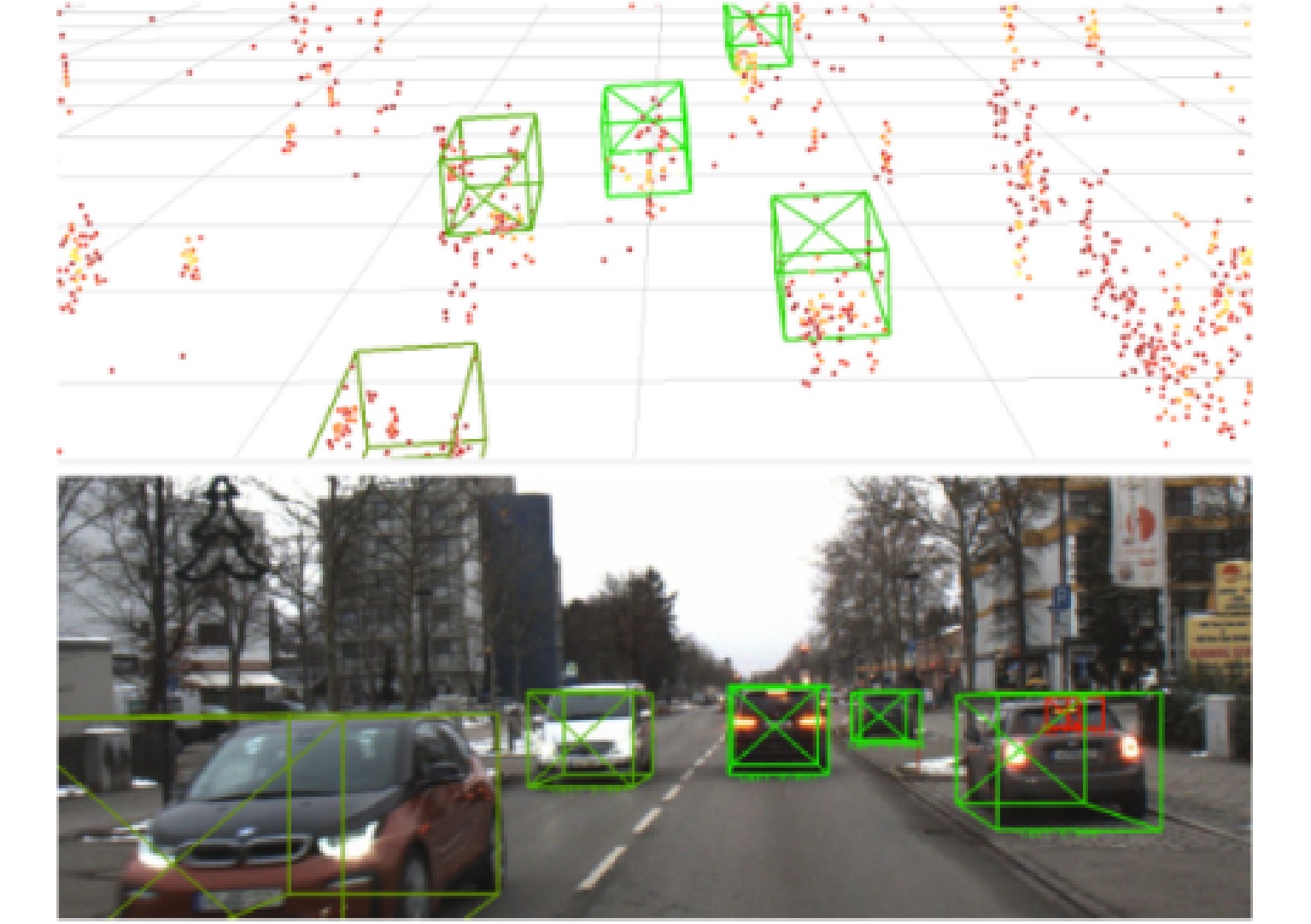
作者 网络结构 效果 Cui等人[38] 基于交叉融合策略的CNN 相较于Astyx数据集上使用的模型,该模型平均每帧提供多达 1500 个雷达检测点Nabati等人[39] CenterFusion 在NuScenes数据集上进行验证,优于最先进的基于相机的目标检测方法 John等人[40] SO-Net 在NuScenes数据集上进行验证, 提高了车辆检测和语义分割的准确性,同时减少了计算时间 Chang等人[41] SAF-FCOS 所提出的SAF-FCOS在所有尺度上都比FCOS具有更好的检测性能 Bansal等人[42] RadSegNet 在密集的车辆以及恶劣的天气和照明条件下实现精确的目标检测 Lo等人[43] RCDPT 所提出的方法相较于常用的融合策略产生了更好的性能 Wu等人[44] MVFusion 在NuScenes数据集上进行验证,提高了单帧雷达-相机融合的性能
下载: 导出CSV
表 5 基于决策级融合方法实现成像处理相关论文汇总
Table 5. Summary of image processing papers based on decision level-fusion method
作者 特点 效果 Sengupta等人[45] 使用匈牙利算法进行数据关联,三卡尔曼滤波方法进行跟踪 实现了鲁棒的三维目标跟踪 Zhou等人[46] 设计了自适应数据关联方法 相较于单传感器,实现了更好的跟踪性能 Bai等人[47] 提出了一种鲁棒的DATMO算法 基于GM-PHD滤波器和信息融合,解决了物体遮挡、
测量丢失等跟踪问题Jha等人[36] 使用变换矩阵融合相机与雷达数据 较为准确地实现了目标的检测和识别 Sengupta等人[48] 提出了一种相机辅助的自动雷达PCL标记和数据集生成方法 实现目标检测和识别,方法简单有效 Dong等人[49] 提出AssociationNet 计算和最小化来自点云和图像边界框之间的欧氏距离,
提高了关联的准确性
下载: 导出CSV
表 6 车载毫米波SAR基础成像算法总结
Table 6. Summary of imaging algorithms for automotive millimeter wave SAR
基础成像算法 作者 雷达载频及体制 场景特点 其他特点 距离多普勒
算法(RDA)
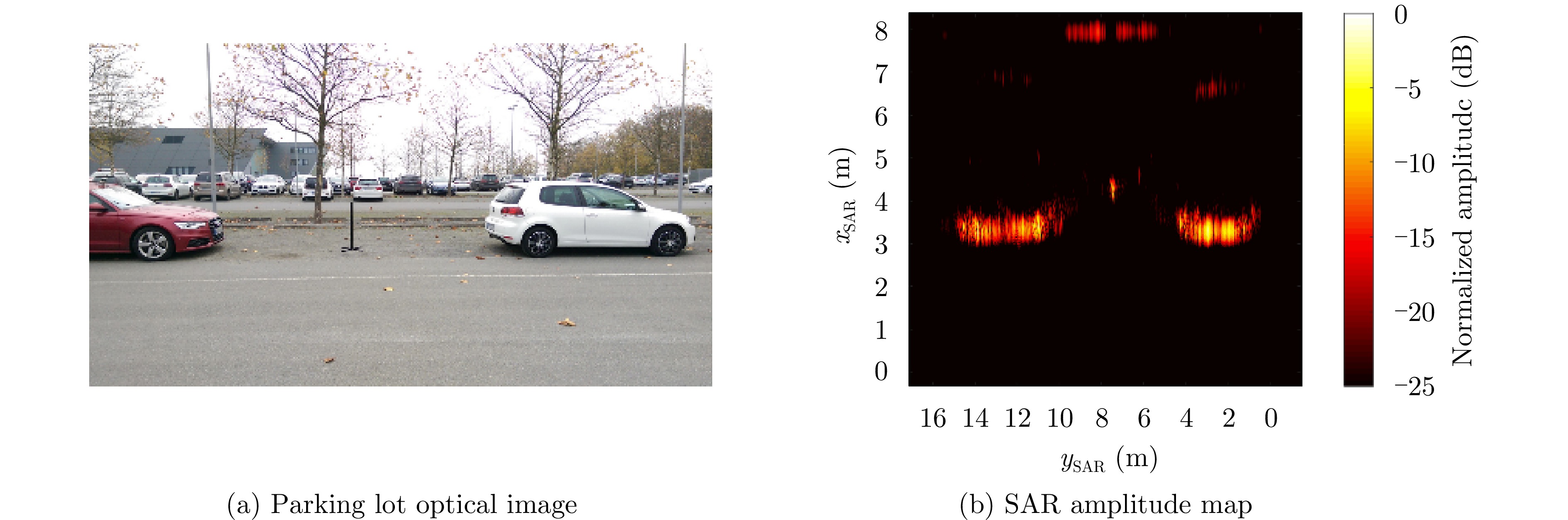
等频域算法Feil等人[50] 77 GHz FMCW 室内中近场(0~100 m) RDA Iqbal等人[51] 77 GHz FMCW 室外停车场(0~10 m) RDA Jiang等人[52] 77 GHz FMCW 室外停车场(0~10 m) RDA Xu等人[53] 77 GHz FMCW 室外停车场(0~10 m) 二维de-chirp处理 距离徙动算法
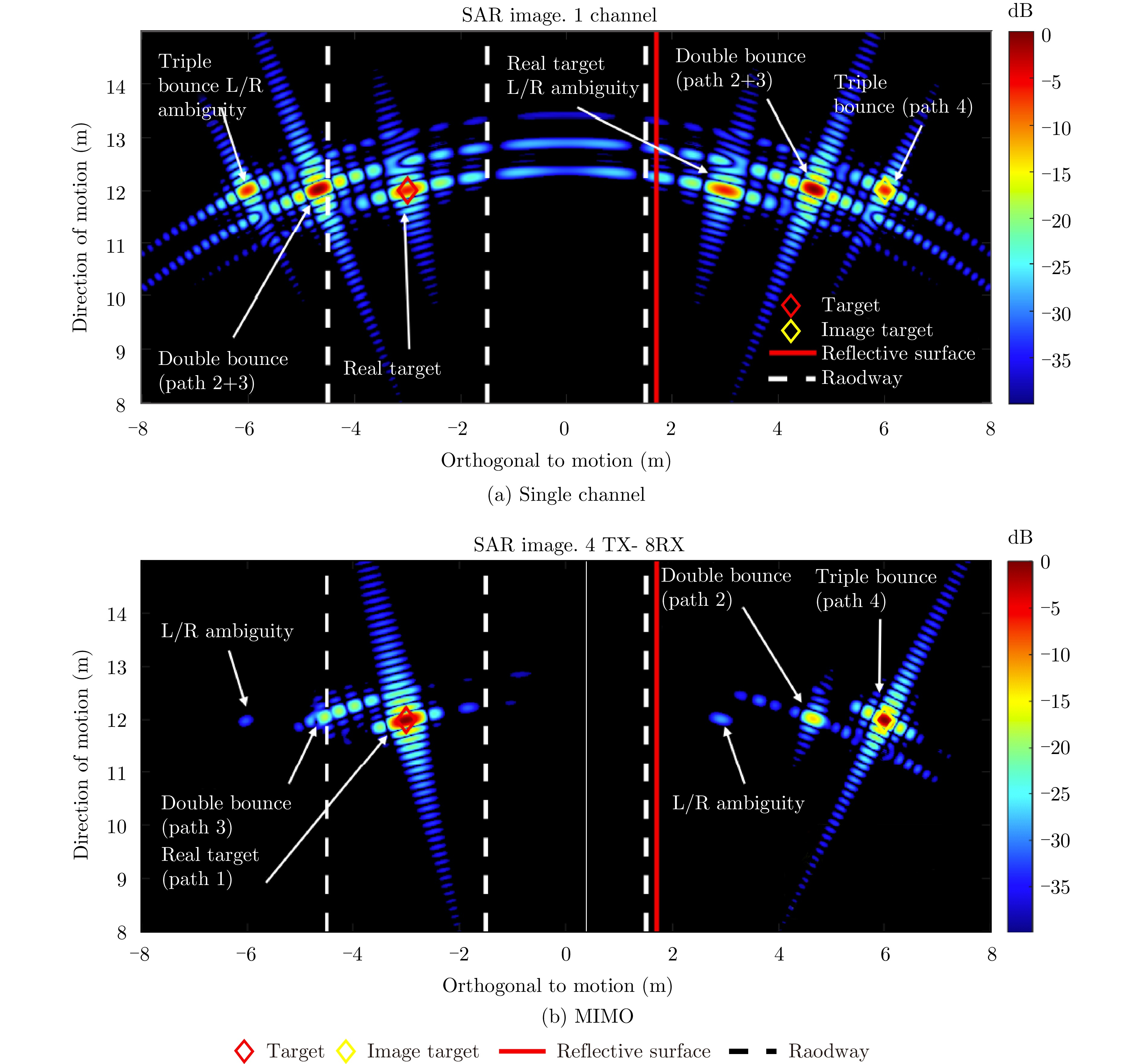
(RMA)Wu等人[54] 24 GHz FMCW 室内停车场(0~10 m) 无 Gumbmann等人[55] 75~100 GHz SFCW 室内小物体(0~1 m) 无 Sriharsha等人[56] 60 GHz FMCW 室外停车场(0~10 m) MIMO-SAR系统 Zhang等人[57] 79 GHz FMCW 室外停车场(0~10 m) 迭代软阈值算法(ISTA) Lee等人[58] 77 GHz FMCW 室外停车场(0~10 m) 压缩感知与距离徙动算法相结合,减少数据量 Iqbal等人[59] 77 GHz FMCW 室外停车场(0~10 m) 通过子孔径数据划分的方法实现了对距离徙动算法的加速 后向投影算法(BPA) Gisder等人[61] 24 GHz FMCW 室外停车场(0~10 m) 基于GPU平台的BP算法流式处理方案 Farhadi等人[62] 77 GHz FMCW 室外中近场(0~20 m) Digital Spotlighting (DS)方法提取原始数据以降低数据量 Farhadi等人[63] 77 GHz FMCW 室外中近场(0~20 m) 动目标成像(MTI) Manzoni等人[64] 77 GHz FMCW 室外近场(0~10 m) 多径干扰抑制,MIMO-SAR系统
下载: 导出CSV
表 7 车载毫米波SAR运动补偿方法总结
Table 7. Summary of motion compensation methods for automotive millimeter wave SAR
运动补偿类型 作者 具体方法 特点 额外设备测量运动参数 Feger等人[68] IMU/GNSS 工业级设备VN-300 Tagliaferri等人[69] SAR-MIN 基于低成本IMU/GNSS设备实现高精度补偿 Wu等人[70,71] 陀螺仪/加速度计 利用陀螺仪与加速度计对运动误差进行多自由度建模 多雷达协同测量运动参数 Iqbal等人[72] RANSAC 其中一部雷达通过RANSAC方法进行轨迹估计 Steiner等人[73] 运动参数估计 4部雷达协同进行3自由度的运动参数估计 参数化自聚焦 Manzoni等人[76] GCP 使用GCP方法估计BP图像的剩余多普勒相位 Manzoni等人[77] GCP 分析导航引起的轨迹误差,使用GCP方法进行雷达参数估计 Xu等人[53] 稀疏贝叶斯学习(SBL) 结合基于流域的SAR图像分割方法 非参数化自聚焦 Farhadi等人[74] 误差非空变的PGA 在BP算法中引入误差非空变的PGA自聚焦处理 Farhadi等人[75] 误差空变的PGA 在FFBP算法中引入误差空变的PGA自聚焦处理 Farhadi等人[63] PGA 应用于汽车SAR动目标成像(MTI)
下载: 导出CSV
表 8 汽车毫米波雷达波形及其特点
Table 8. Summary of common automotive millimeter-wave radar waveform and its characteristics
分类 调制方法 作者 波形参数 波形特点 LFM波形改进及
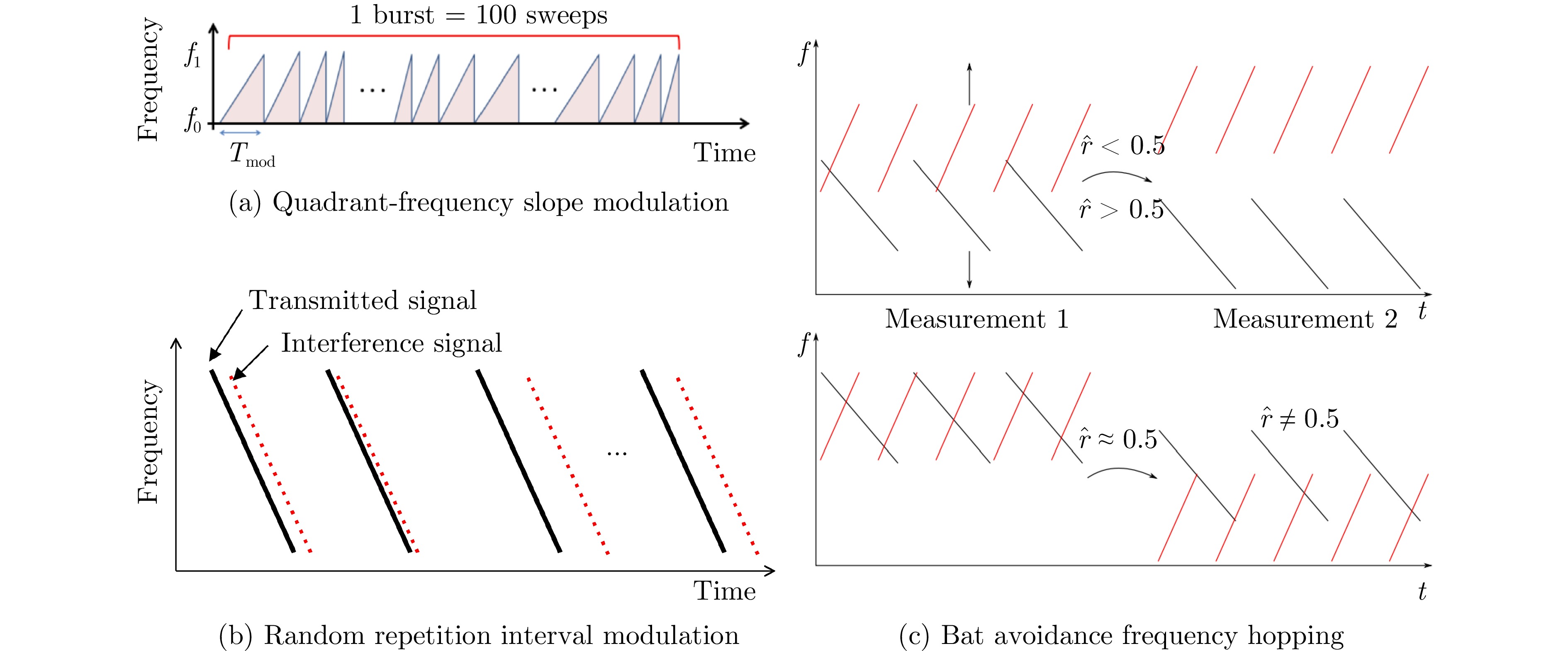
参数调整频率斜坡调制 Kim等人[93] 周期10~16.5 μs 调频周期正弦变化 随机重复间隔 Kitsukawa等人[94] 带宽150 MHz 发射间隔随机改变 蝙蝠干扰回避跳频 Bechter等人[95] 载频76.3 GHz,带宽400 MHz 上移或下移频率 时间和频率分集 Hossain等人[96] 载频76.5 GHz,带宽300~500 MHz 带宽、调频率随机改变 跳频随机chirp (FHRC) Luo等人[97] 载频76.0~76.7 GHz 中心频率、带宽、调频率均随机改变 恒频与LFM组合 Yang等人[98] 载频24 GHz 恒频和斜率随机变化的三角波组合 LFM波形编码 相位编码 Uysal等人[99] 带宽0.4 GHz,16位Kasami序列编码 编码同时拉伸处理,降低采样要求 伪随机噪声(PRN)码 Liu等人[100] 载频24 GHz,20 Mbit/s 10位PRN序列调制 不同PRN码序列间相关性较低 其他波形 正交噪声波形 Xu等人[101] 载频24 GHz,带宽600 MHz 具有良好的随机相位分集 正交频分复用(OFDM) Basireddy等人[103] 载频77 GHz 以OFDM方式通过加扰的m序列产生
下载: 导出CSV
表 9 汽车毫米波雷达抗互扰协调系统及策略总结
Table 9. Automotive millimeter-wave radar anti-interference coordination system and strategy summary
下载: 导出CSV
表 10 汽车雷达干扰抑制的信号处理方法对比
Table 10. Comparison of signal processing methods for automotive radar interference suppression
方法大类 适用场景 优点 缺点 滤波 稳定或缓慢变化的干扰 简单,速度快,稳定干扰场景干扰抑制效果好 复杂或快速变化场景性能下降,
参考信号难获得干扰消除重构 干扰占比不高,时间上集中且特征明显 不改变未受干扰的信号部分信息得以完整保留 需要对干扰进行精确检测,
干扰占比较大时性能下降信号分离 干扰和信号在不同域中具有显著不同的特征 避免干扰的显式检测,避免信号的功率损失 计算量大,存在固有的离网问题使
分离不够准确深度学习 端到端数据处理 端到端数据处理性能出色,替代底层数据处理 缺乏理论依据,且非常依赖
输入的数据集
下载: 导出CSV
表 11 不同域中的毫米波雷达干扰抑制滤波方法
Table 11. Interference suppression filtering methods for millimeter wave radar in different domains
下载: 导出CSV
表 12 毫米波雷达干扰消除与重构方法总结
Table 12. Summary of interference elimination and reconstruction methods for millimeter wave radar
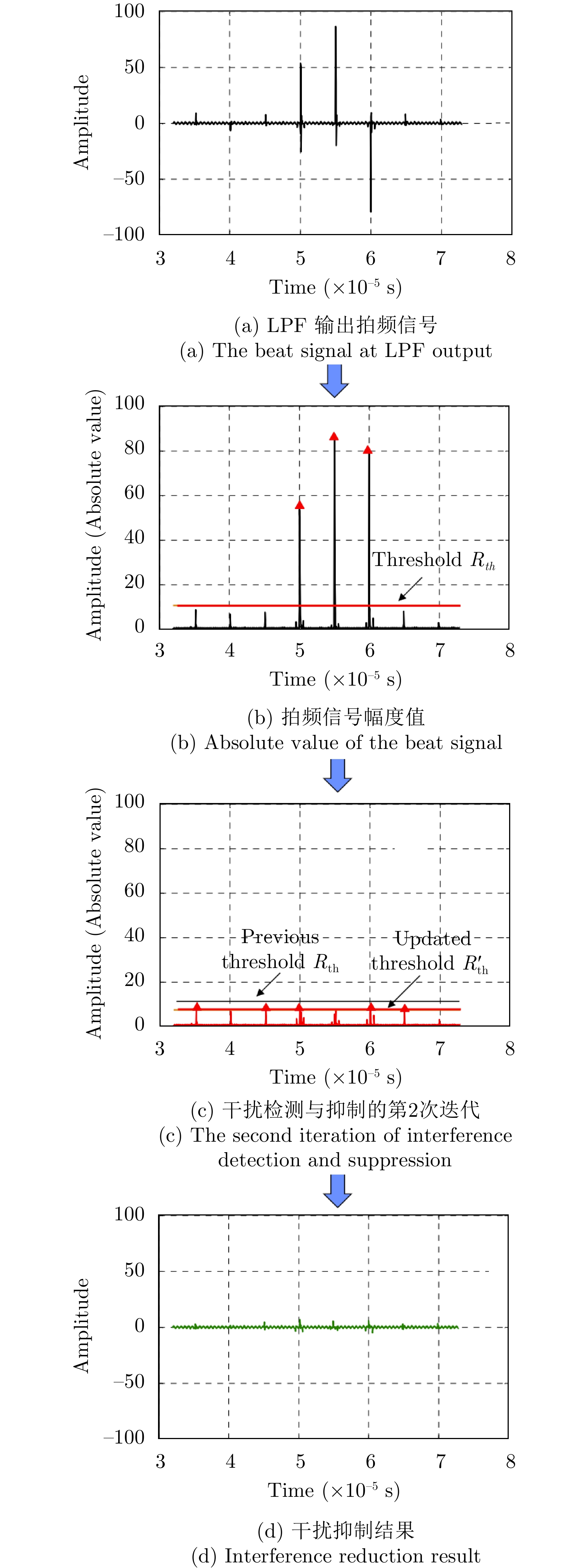
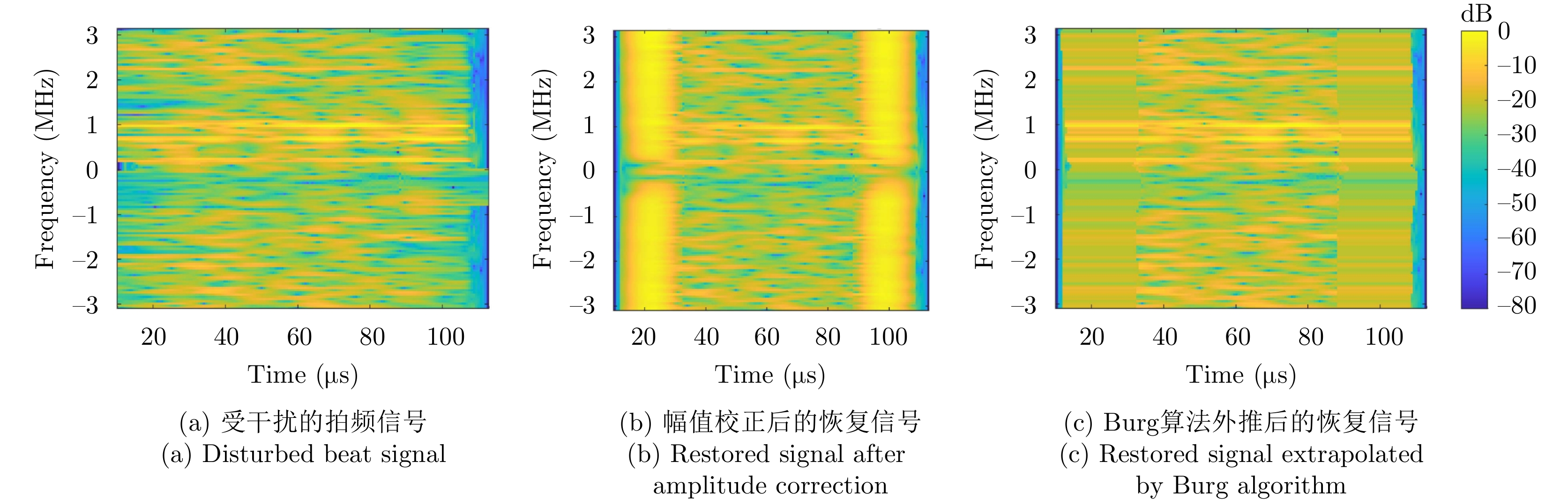
检测方法 作者 作用域 消除/重构方法 特点 基于阈值 Nozawa等人[116] 时域 升余弦窗 先去除相位噪声影响再在时域检测抑制干扰脉冲信号 MSER Barjenbruch等人[117] 时域 反升余弦窗 用升余弦窗口平滑,消除恢复信号的不连续性 AWEN Choi等人[118] 时域 直接消除 通过加权包络归一化算法获得更合理的阈值从而消除干扰 基于阈值 Bechter等人[119] 时域 稀疏采样IMAT 将压缩感知的稀疏采样算法应用于信号恢复,IMAT使信号恢复更准确 迭代阈值 Umehira等人[120] 时域 直接消除 基于迭代阈值检测干扰,可以检测到弱干扰 基于阈值 Neemat等人[121] 时频域 AR模型插值 在二维相关系数、振幅和相位恢复上显著改进,但不适用于高加速度目标 PELT-KCN Liu等人[122] 时域 AR模型恢复 利用已知变化数计算最优惩罚因子,比PELT算法检测准确性更高 峰值检测 Jung等人[123] 时域 卡尔曼滤波 将未失真信号部分作为卡尔曼滤波器的输出来预测失真信号部分 时域幅值 Alhumaidi等人[124] 频域 迭代频谱主峰 先在快时间和慢时间消除干扰,再迭代选择频谱主峰来近似缺失信号 CFAR Wang等人[125] 时频域 CFAR-Burg 用一维CFAR检测器在时频域中检测干扰,再用Burg算法外推 基于阈值 Wang等人[126] 时域 Matrix Pencil 将拍频信号建模为复指数之和,用MP方法估计截断信号参数 基于阈值 Rameez等人[127] 时域 慢时间AR 慢时间AR重构比快时间AR效果更好,但需要预先接收多帧数据 CFAR Yang等人[129] 时域 IAA 先用CFAR在快时间和慢时间域中检测强干扰和弱干扰,再用IAA成像
下载: 导出CSV
表 13 用于毫米波雷达干扰抑制的信号分离方法总结
Table 13. Summary of signal separation methods for millimeter-wave radar interference suppression
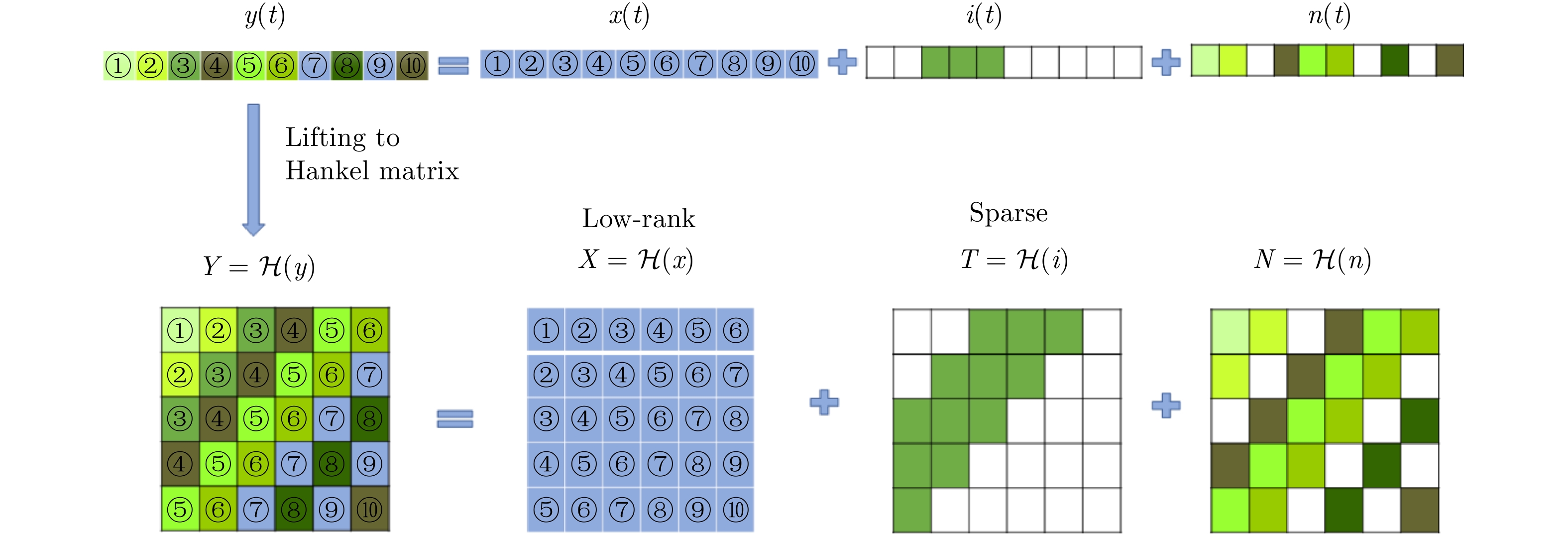
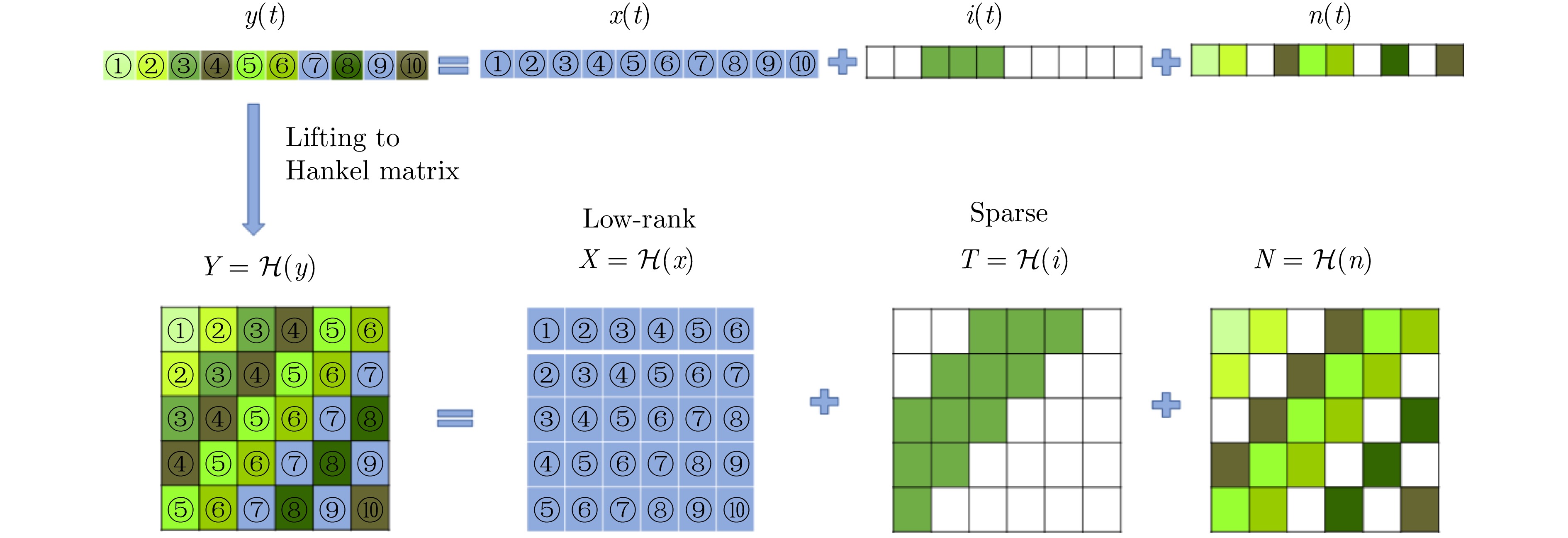
分离方法 作者 分离基础 特点 MCA Uysal等人[130] 干扰和拍频的稀疏性 利用干扰与拍频在不同域稀疏性的差异分别做STFT和DFT后分离 IMT-EMD Wu等人[131] EMD, IMT 通过IMT算法确定EMD后的干扰主导分量并将其从信号中分离 小波去噪 Lee等人[132] 小波变换 反转小波去噪过程,提取高强度脉冲干扰,去除低强度正弦信号 Hankel矩阵分解 Wang等人[134] RPCA 将干扰信号与有用信号提升为低秩稀疏Hankel矩阵后求解RPCA问题 EMD Liu等人[135] EMD、连续均方误差 EMD分解接收信号后通过连续均方误差选择干扰分量并通过阈值抑制 TQWT Xu等人[136] 小波变换、稀疏性 利用目标信号和干扰在不同Q值小波变换中的稀疏性差异来分离干扰 GSD-IC Lee等人[137] 几何序列分解 将采样信号看作几何序列,分解成不同的非正交叠加信号,从而分离干扰 行稀疏 Wang等人[138] 干扰稀疏性和有用信号行稀疏性 利用干扰时域稀疏性和有用回波信号频域行稀疏性,引入正则化约束问题
下载: 导出CSV
表 1 Summary of relevant papers on the realization of point cloud imaging based on signal processing
Authors Characteristics Radar parameters Effects Li et al. [ 2] BPSK-MIMO radar The radar operating frequency is 79 GHz, and the bandwidth is 1.6 GHz It can image scenes, such as curbs, drains, and parking lots, and has a certain height measurement capability Qian et al. [ 3] Automotive radar system MilliPoint based on SAR imaging Two cascaded chips, a 6T8R antenna array, with a range resolution of 0.044 m and a maximum detection range of 11.31 m It constructs a 3D point cloud with higher density and resolution for the target Engels et al. [ 4] High-performance four-chip cascaded radar board AWR2243, with a range resolution of 0.2 m, a velocity resolution of 0.1 m/s, an azimuth resolution of approximately 1.4°, and an elevation resolution of <3° It achieves target detection in a highway scenario and verifies the working performance of the radar in harsh working environments Lin Fengqin et al. [ 5] Proposed a multi-frame fusion algorithm based on the iterative closest point AWR2243, with a range resolution of 0.059 m,
a velocity resolution of 0.055 m/s, and an
angle resolution of 1.4°Using the multi-frame fusion algorithm and the adaptive neighborhood radius DBSCAN algorithm, relatively dense point cloud data of the scene are obtained Weishaupt et al. [ 6] Proposed the PreCFAR method The radar center frequency is 78 GHz, the range resolution is 0.075 m, the velocity resolution is 0.15 m/s, and the angle resolution is 3° It improves the CFAR target detection algorithm Wei et al. [ 7] Proposed the Area-Based CFAR method Not mentioned in the article It significantly improves the performance of the CFAR detector and generates a denser point cloud image Lan Lvhongkang et al. [ 8] Proposed an adaptive setting method for the threshold coefficient in the CFAR algorithm AWR2243, with a range resolution of 0.15 m,
an azimuth resolution of 1.4°, and an
elevation resolution of 18°It generates a relatively dense and reliable 3D point cloud image of the millimeter-wave radar
下载: 导出CSV
表 2 Summary of relevant papers on the realization of point cloud processing based on deep learning
Authors Characteristics Effects Danzer et al. [ 9] Applied PointNets to 2D radar data Performed detection, classification, and 2D bounding box estimation of vehicles Jin et al. [ 10] Used GMM for radar point cloud segmentation The GMM method is simple and has a better classification effect on pedestrians but a poorer effect on vehicles Xu et al. [ 11] Proposed the RANSAC algorithm to achieve road boundary estimation Achieved road boundary detection within 30 m from the radar with an accuracy of 81.89% Jin et al. [ 12] Proposed an autonomous driving road route estimation algorithm based on radar point cloud data The estimation accuracy of the proposed method is better than that of the CNN based on the grid map Cheng et al. [ 13, 14] Proposed a 3D point cloud detector RPDNet based on the automatic generation of labels from LiDAR data Compared with the CFAR detector, RPDNet has better performance in suppressing radar clutter and generating denser point clouds Jiang et al. [ 15] Proposed CV-DCN Achieved angle super-resolution of single-frame radar data using deep learning Franceschi et al. [ 16] Adopted a two-level cascaded neural network architecture to replace CFAR and DOA estimation Generated a denser 3D point cloud image compared with traditional radar signal processing methods Tan et al. [ 17] Proposed a multi-frame millimeter-wave radar point cloud detection framework for target detection Achieved the detection and recognition of vehicles in multiple actual road scenarios Sun et al. [ 18, 19] Proposed a neural network architecture 3DRIMR based on deep learning Reconstructed the 3D shape of objects in the form of a dense point cloud based on sparse raw millimeter-wave radar data Huang et al. [ 20] Proposed the use of the DBSCAN algorithm and a faster R-CNN network Achieved vehicle detection in a parking lot scene with an average detection accuracy of 96.95% Dreher et al. [ 21] Compared two methods for target detection based on radar point clouds The grid-based method is more efficient, but in dense urban traffic conditions, the point-cloud-based network achieves better detection performance Xu et al. [ 22] Proposed RPFA-Net Significantly improved the accuracy of network regression for heading angle estimation and 3D target detection
下载: 导出CSV
表 3 Summary of image processing papers based on the data-level fusion method
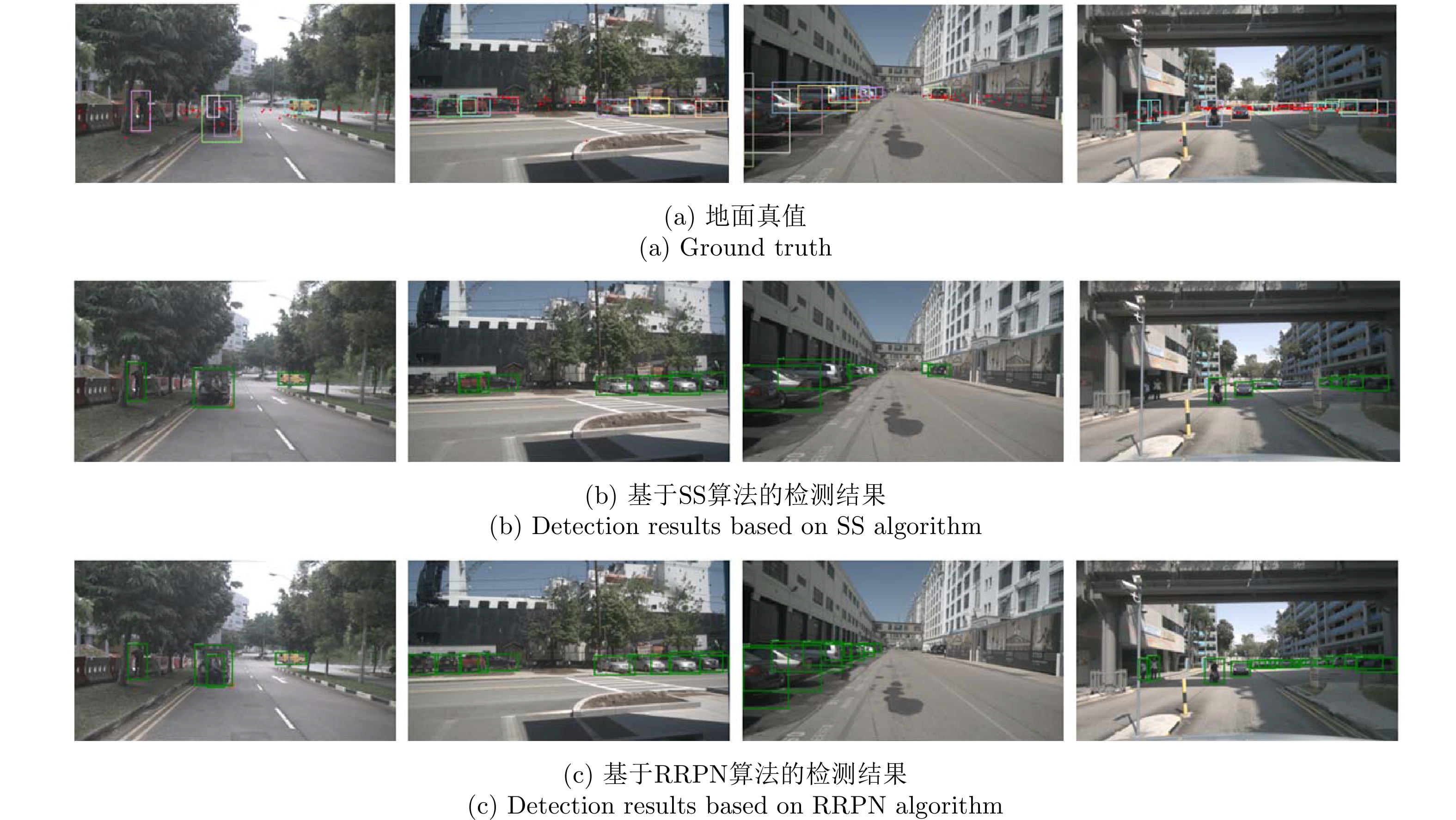
Authors Network structure Effects Meyer et al. [ 34] Fast R-CNN The AstyxHiRes dataset is proposed to enable 3D target detection Nabati et al. [ 35] RRPN Higher speed and accuracy compared with Fast R-CNN Jha et al. [ 36] YOLOv3 Real-time detection and recognition for vehicle navigation in low-visibility environments Nobis et al. [ 37] CRF-Net Detection performance is better than current state-of-the-art image detection networks
下载: 导出CSV
表 4 Summary of papers realizing image processing based on the feature-level fusion method
Authors Network structure Effects Cui et al. [ 38] CNN based on cross-fertilization strategy Compared with the model used on the Astyx dataset, this model provides up to 1,500 radar detection points per frame on average Nabati et al. [ 39] CenterFusion Validation on the NuScenes dataset outperforms state-of-the-art camera-based target detection methods John et al. [ 40] SO-Net Validation on the NuScenes dataset improves the accuracy of vehicle detection and semantic segmentation while reducing the computation time Chang et al. [ 41] SAF-FCOS The proposed SAF-FCOS has better detection performance than
FCOS on all scalesBansal et al. [ 42] RadSegNet Accurate target detection in dense traffic as well as under poor weather and lighting conditions Lo et al. [ 43] RCDPT The proposed method yields better performance compared with commonly used fusion strategies Wu et al. [ 44] MVFusion Validation on the NuScenes dataset improves the performance of
single-frame radar-camera fusion
下载: 导出CSV
表 5 Summary of papers realizing image processing based on decision-level fusion
Authors Characteristics Effects Sengupt et al. [ 45] Data correlation using the Hungarian algorithm and tracking by the triple Kalman filtering method Realized robust 3D target tracking Zhou et al. [ 46] Designed adaptive data association methods Achieves better tracking performance compared with a single sensor Bai et al. [ 47] A robust DATMO algorithm is proposed Based on GM-PHD filter and information fusion, it solves tracking problems, such as object occlusion and measurement loss Jha et al. [ 36] Fusion of camera and radar data using a transformation matrix Target detection and identification is achieved more accurately Sengupt et al. [ 48] A camera-assisted automatic radar PCL labeling and dataset generation method is proposed Achieve target detection and identification in a simple and effective way Dong et al. [ 49] AssociationNet is proposed Calculates and minimizes the Euclidean distance from the point cloud to the image bounding box, improving the accuracy of the correlation
下载: 导出CSV
表 6 Summary of imaging algorithms for automotive millimeter-wave synthetic aperture radar (MMW SAR)
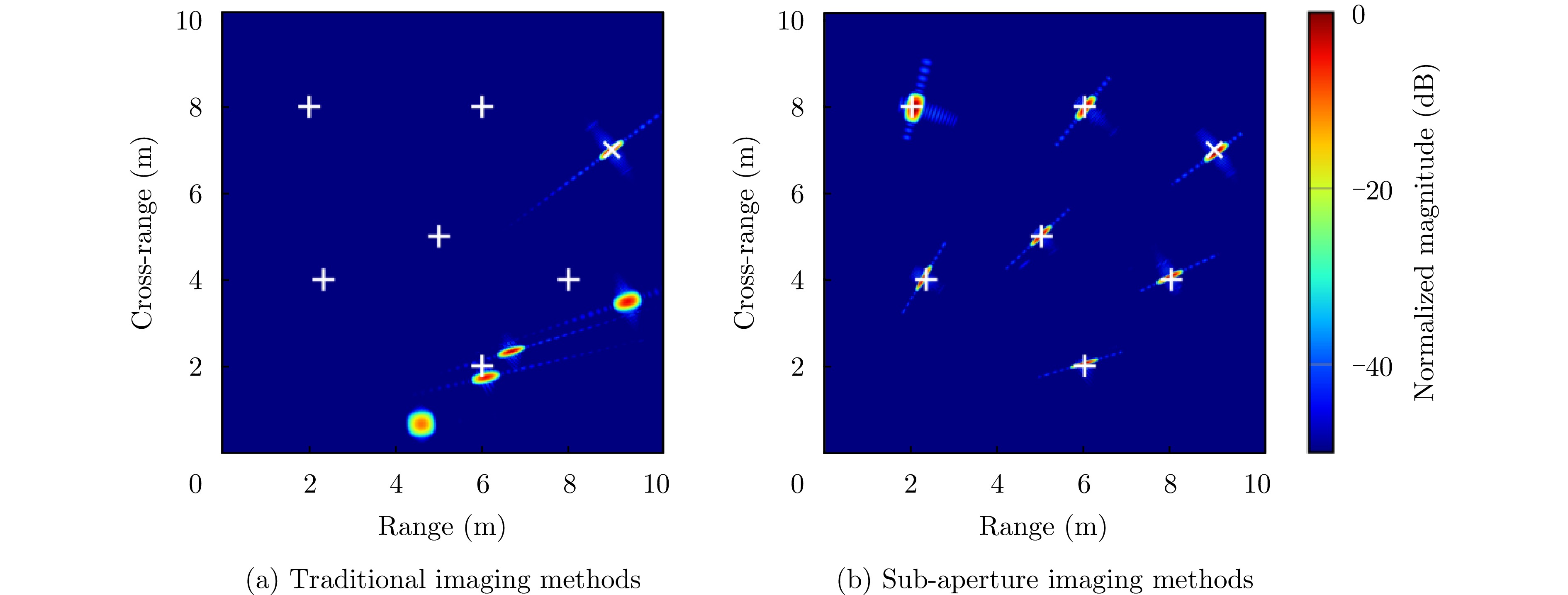
Methods Authors Radar carrier frequency and waveform Scene characteristics Other characteristics Frequency domain algorithms Feil et al. [ 50] 77 GHz FMCW Indoor middle and near field (0–100 m) RDA Iqbal et al. [ 51] 77 GHz FMCW Outdoor parking lot (0–10 m) RDA Jiang et al. [ 52] 77 GHz FMCW Outdoor parking lot (0–10 m) RDA Xu et al. [ 53] 77 GHz FMCW Outdoor parking lot (0–10 m) 2D de-chirping RMA Wu et al. [ 54] 24 GHz FMCW Indoor parking lot (0–10 m) \ Gumbmann et al. [ 55] 75–100 GHz SFCW Small indoor objects (0–1 m) \ Sriharsha et al. [ 56] 60 GHz FMCW Outdoor parking lot (0–10 m) MIMO-SAR system Zhang et al. [ 57] 79 GHz FMCW Outdoor parking lot (0–10 m) Iterative Soft Thresholding Algorithm Lee et al. [ 58] 77 GHz FMCW Outdoor parking lot (0–10 m) Compressed sensing combined with distance migration algorithms to reduce data volume Iqbal et al. [ 59] 77 GHz FMCW Outdoor parking lot (0–10 m) Acceleration of TMA by sub-aperture processing BPA Gisder et al. [ 61] 24 GHz FMCW Outdoor parking lot (0–10 m) Streaming solution for BPA on GPU-based platforms Farhadi et al. [ 62] 77 GHz FMCW Outdoor middle and near field (0–20 m) Digital spotlighting method to extract raw data to reduce data volume Farhadi et al. [ 63] 77 GHz FMCW Outdoor middle and near field (0–20 m) Moving Target Imaging (MTI) Manzoni et al. [ 64] 77 GHz FMCW Outdoor near field (0–10 m) Multipath interference suppression, MIMO-SAR system
下载: 导出CSV
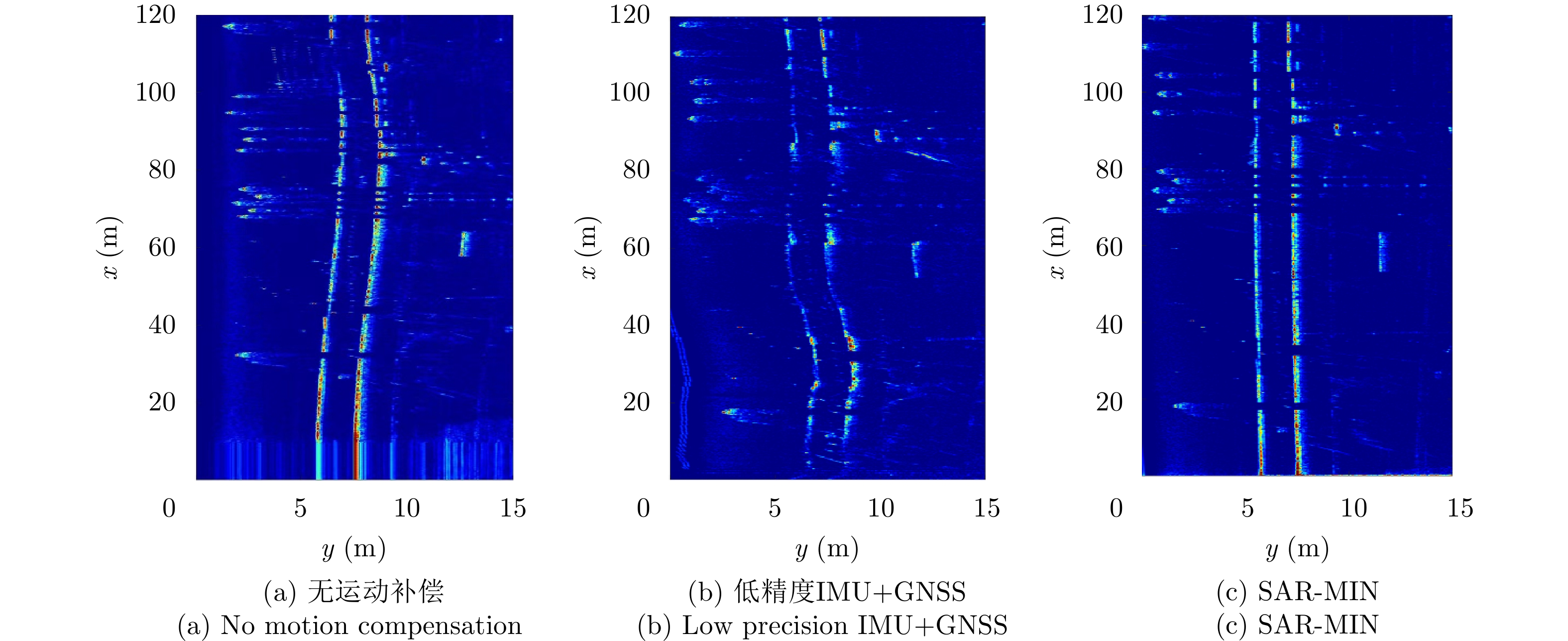
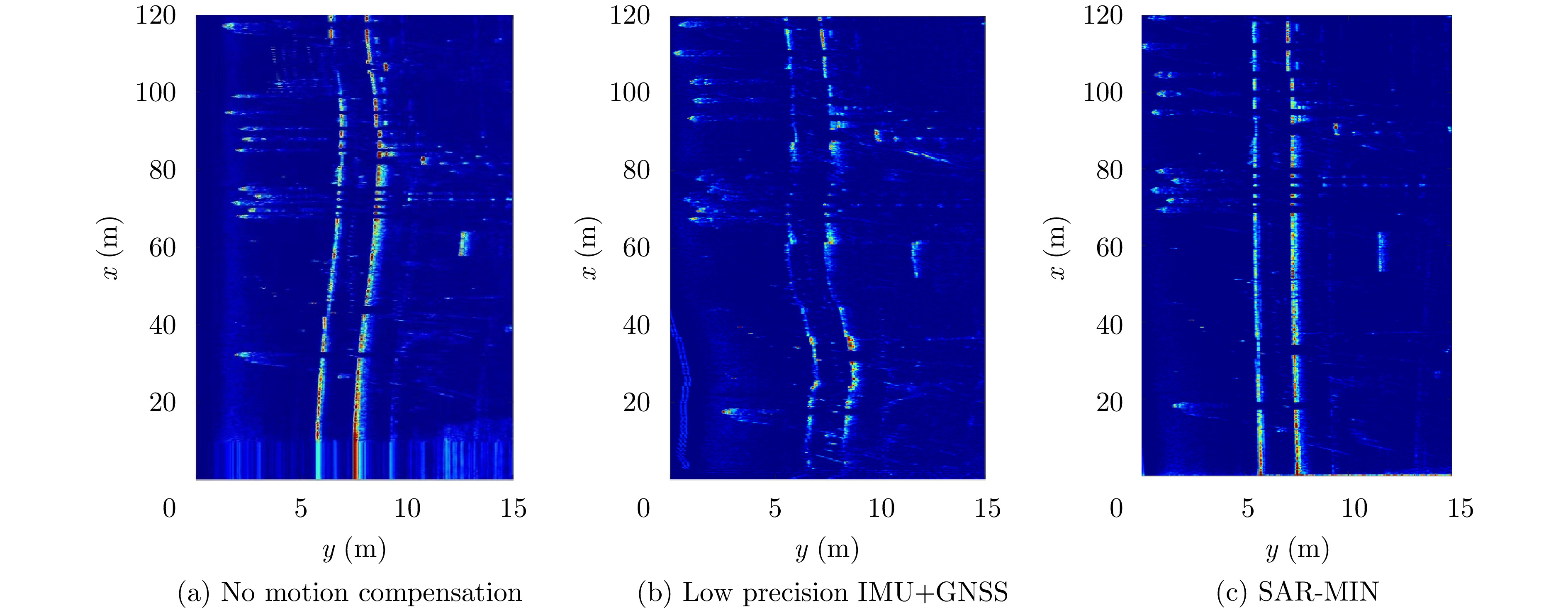
表 7 Summary of motion compensation methods for automotive MMW SAR
Types Authors Methods Characteristics Additional equipment to measure motion parameters Feger et al. [ 68] IMU/GNSS Industrial-grade equipment VN-300 Tagliaferri et al. [ 69] SAR-MIN High-precision compensation based on low-cost IMU/GNSS equipment Wu et al. [ 70, 71] Gyroscope/accelerometer Multi-degree-of-freedom modeling of motion errors using gyroscopes and accelerometers Multi-radar collaborative measurement of motion parameters Iqbal et al. [ 72] RANSAC One of the radars performs trajectory estimation by the RANSAC method Steiner et al. [ 73] Motion parameter estimation Four radars collaborate for 3-degree-of-freedom motion parameter estimation Parametric autofocus Manzoni et al. [ 76] GCP Estimation of the residual Doppler phase of BP images using the GCP method Manzoni et al. [ 77] GCP Analyzing navigation-induced trajectory errors for radar parameter estimation using GCP methods Xu et al. [ 53] Sparse Bayesian learning Combining watershed-based SAR image segmentation methods Nonparametric autofocus Farhadi et al. [ 74] Space-invariant PGA Introducing space-invariant error in BPA for PGA Farhadi et al. [ 75] Space-variant PGA Introducing space-variant error in FFBPA for PGA Farhadi et al. [ 63] PGA Moving target imaging
下载: 导出CSV
表 8 Summary of common automotive MMW radar waveforms and their characteristics
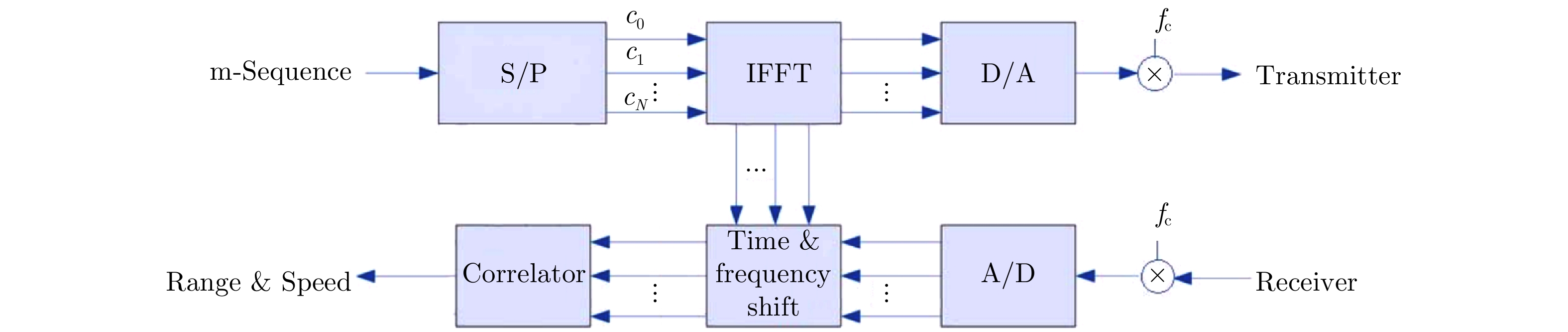
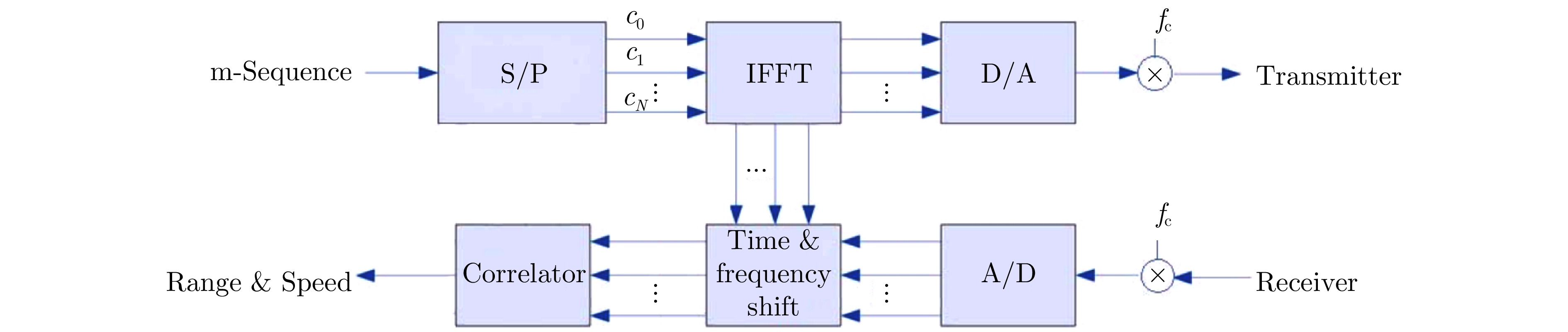
Types Modulation scheme Authors Waveform parameters Characteristics LFM waveform improvement and parameter adjustment Frequency slope modulation Kim et al. [ 93] Period 10–16.5 µs Sine variation of the FM period Randomized repetition interval Kitsukawa et al. [ 94] Bandwidth 150 MHz Random variation of the transmission interval Bat interference avoidance frequency hopping Bechter et al. [ 95] Carrier frequency 76.3 GHz, bandwidth 400 MHz Shift up or down the frequency Time and frequency diversity Hossain et al. [ 96] Carrier Frequency 76.5 GHz, bandwidth 300–500 MHz Bandwidth and modulation rate change randomly Frequency hopping random chirp Luo et al. [ 97] Carrier frequency 76.0–76.7 GHz Center frequency, bandwidth, and modulation rate all change randomly Combination of constant frequency and LFM Yang et al. [ 98] Carrier frequency 24 GHz Combination of constant frequency and randomly varying slope triangular waves LFM waveform encoding Phase encoding Uysal et al. [ 99] Bandwidth 0.4 GHz, 16-bit Kasami sequence encoding Encoding and stretch processing for reducing sampling requirements Pseudorandom noise (PRN) code Liu et al. [ 100] Carrier frequency 24 GHz, 20 Mbps 10-bit PRN sequence modulation Low correlation between different PRN code sequences Other waveforms Orthogonal noise waveforms Xu et al. [ 101] Carrier frequency 24 GHz, bandwidth 600 MHz Good random phase diversity OFDM Basireddy et al. [ 103] Carrier frequency 77 GHz Generated by scrambled m-sequence in an OFDM approach
下载: 导出CSV
表 9 Automotive MMW radar anti-interference coordination system and strategy summary
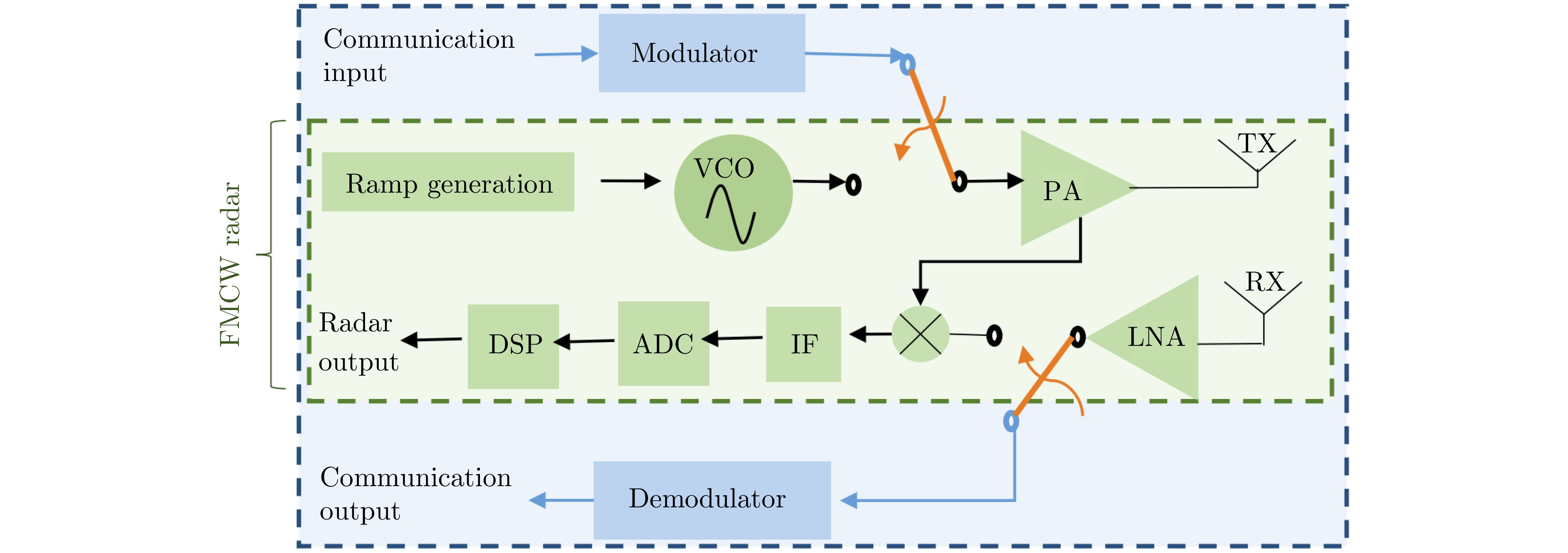
Objects System and strategy Authors Composition Characteristics Transportation system RadarMAC Khoury et al. [ 105] System architecture and radar parameter assignment algorithm The vehicle is connected to the cloud center via an LTE link, and the center performs dynamic parameter assignments via algorithms Central agents Mazher et al. [ 106] Communications infrastructure, V2I module resource allocation strategy The radar relies on a V2I communication module to connect to the base station, which allocates FMCW radar resources RadCom Aydogdu et al. [ 107] Radar and intercommunication, rMAC and cMAC programs Built on a combination of FDM, TDMA for radar, and CSMA for communications Vehicles RadChat Aydogdu et al. [ 108, 109] Hardware units and distributed networking protocols Built on the same radar and communications hardware and MACs
下载: 导出CSV
表 10 Comparison of signal processing methods for automotive radar interference suppression
Types Applicable scenarios Advantages Disadvantages Filtering Stable or slowly changing interference Simple, fast, and stable interference scenarios with good interference suppression Complex or rapidly changing scenes have degraded performance, and reference signals are difficult to obtain Interference cancellation and reconfiguration Interference is not a high percentage, concentrated and well characterized in time The unaltered signal portion of the information is retained intact Accurate detection of interference is required, and performance degrades when interference accounts for a large percentage of the time Signal separation Interference and signaling have significantly different characteristics in different domains Avoid explicit detection of interference and loss of signal power The calculations are extensive, and there are inherent off-grid problems that make the separation less accurate Deep learning End-to-end data processing Excellent end-to-end data processing performance, replacing underlying data processing Lacks a theoretical basis and is dependent on the input dataset
下载: 导出CSV
表 11 Interference suppression filtering methods for MMW radar in different domains
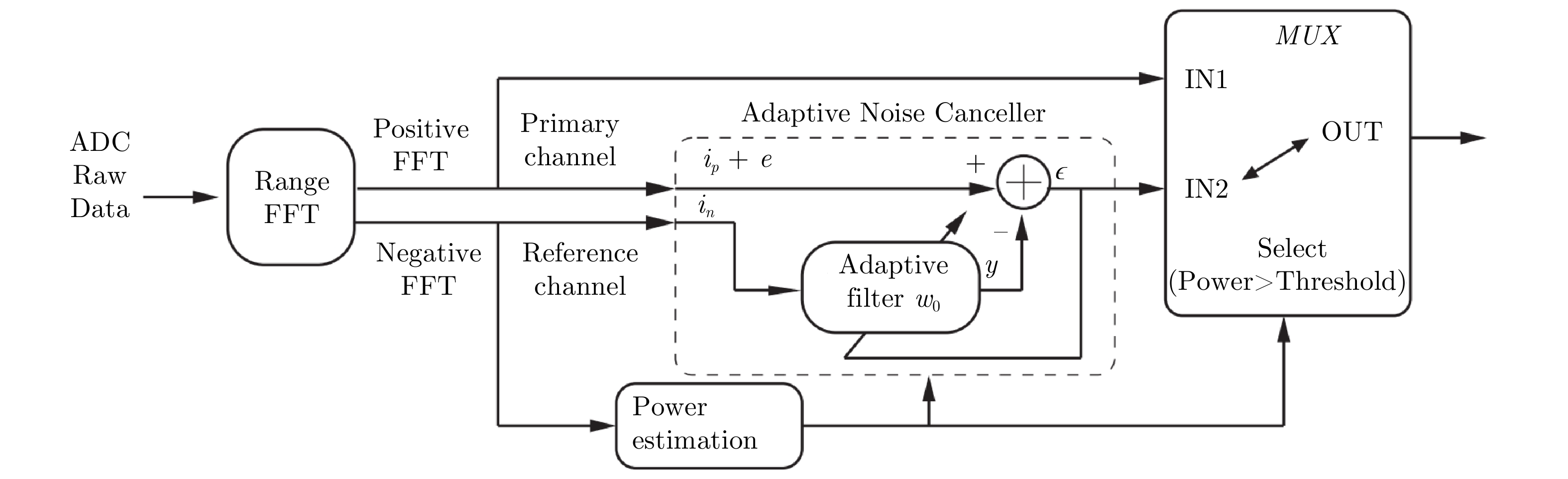
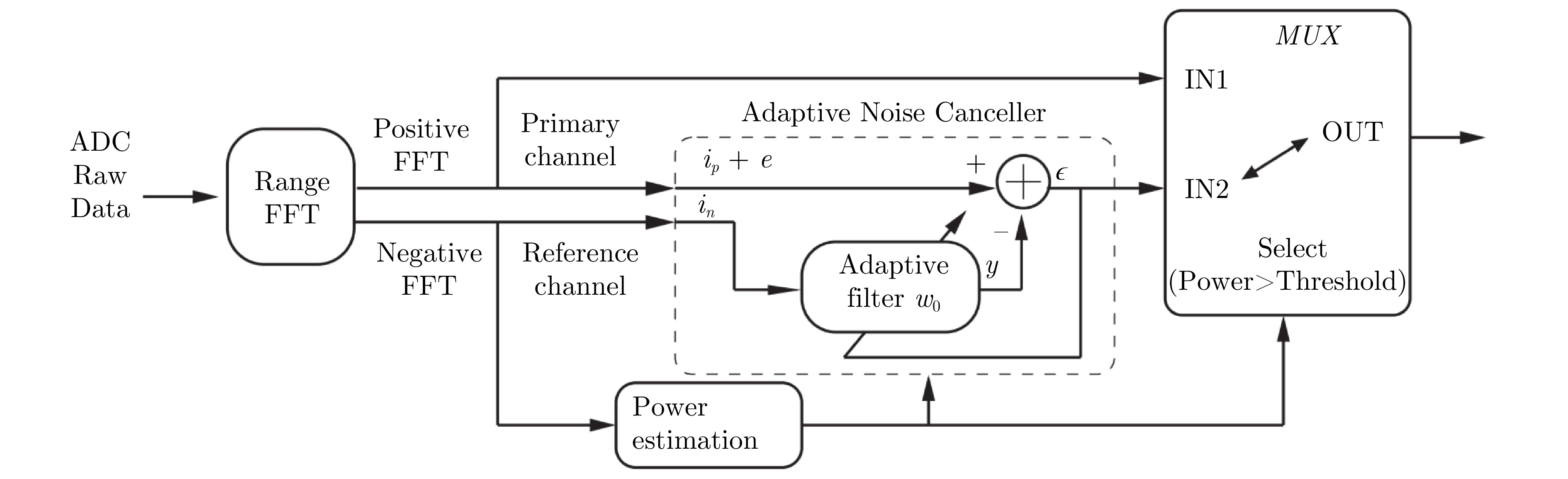
Methods Authors Domains Characteristics Adaptive noise cancellation Jin et al. [ 110] Time domain The positive and negative frequency components of the signal are fed into the main and reference channels of the adaptive noise canceller, respectively FFT cell amplitude nonlinear filtering Wagner et al. [ 111] Frequency domain Nonlinear filtering of the FFT cell amplitude for multiple chirps preserves the initial phase information DBF/adaptive DBF Bechter et al. [ 112, 114] Spatial domain In MIMO radar, only interference affects the actual aperture size, and the useful signal is more affected by the virtual aperture. Only valid if the number of interfering signals is less than the number of actual receiving antenna units Rameez et al. [ 115] Artyukhin et al. [ 113]
下载: 导出CSV
表 12 Summary of interference elimination and reconstruction methods for MMW radar
Detection methods Authors Domain Elimination and reconstruction methods Characteristics Threshold-based Nozawa et al. [ 116] Time domain Ascending cosine window The phase noise effect is removed before suppressing the interfering pulse signal in the time domain detection MSER Barjenbruch et al. [ 117] Time domain Inverse ascending cosine window Smoothing with an increasing cosine window removes discontinuities in the recovered signal AWEN Choi et al. [ 118] Time domain Direct elimination A more reasonable threshold is obtained by the weighted envelope normalization algorithm, thus eliminating the interference Threshold-based Bechter et al. [ 119] Time domain Sparse sampling Iterative Method with Adaptive Thresholding (IMAT) Applying the compression-aware sparse sampling algorithm to signal recovery, IMAT makes signal recovery more accurate Iteration threshold Umehira et al. [ 120] Time domain Direct elimination Detecting interference based on iterative thresholding allows weak interference to be detected Threshold-based Neemat et al. [ 121] Time-frequency domain AR model interpolation Significant improvements in 2D correlation coefficients, amplitude, and phase recovery, but inapplicable to high acceleration targets PELT-KCN Liu et al. [ 122] Time domain AR model restoration The optimal penalty factor is calculated using the known number of changes, which is more accurate than the PELT algorithm detection Peak detection Jung et al. [ 123] Time domain Kalman filtering The undistorted signal portion is used as the output of the Kalman filter to predict the distorted signal portion Time domain amplitude Alhumaidi et al. [ 124] Frequency domain Iterative spectrum main peak The interference is eliminated at fast and slow times, and the main peak of the spectrum is iteratively selected to approximate the missing signal CFAR Wang et al. [ 125] Time-frequency domain CFAR-Burg The interference is detected in the time-frequency domain with a 1D CFAR detector and extrapolated with the Burg algorithm Threshold-based Wang et al. [ 126] Time domain Matrix Pencil (MP) The beat frequency signal is modeled as a sum of complex exponentials, and the truncated signal parameters are estimated by the MP method Threshold-based Rameez et al. [ 127] Time domain Slow-time AR Slow-time AR reconstruction works better than fast-time AR but requires receiving multiple frames of data in advance CFAR Yang et al. [ 129] Time domain IAA Strong and weak disturbances were first detected with CFAR in the fast and slow time domains and then imaged with IAA
下载: 导出CSV
表 13 Summary of signal separation methods for MMW radar interference suppression
Separation methods Authors Separation basis Characteristics MCA Uysal et al. [ 130] Sparsity of interference and beat frequency The difference in sparsity between interference and beat frequency in different domains is utilized to perform STFT and DFT post-separation, respectively IMT-EMD Wu et al. [ 131] EMD and IMT The interference dominant component after EMD is determined and separated from the signal by the IMT algorithm Wavelet denoising Lee et al. [ 132] Wavelet transform Reverse the wavelet denoising process to extract high-intensity impulse interference and remove low-intensity sinusoidal signals Hankel matrix decomposition Wang et al. [ 134] RPCA Solve the RPCA problem after lifting the interference and useful signals to a low-rank sparse Hankel matrix EMD Liu et al. [ 135] EMD and continuous mean square error The EMD decomposes the received signal, selects the interference component by successive mean square error, and suppresses it by thresholding TQWT Xu et al. [ 136] Wavelet transform and sparsity The difference in sparsity between target and interference signals in wavelet transforms with different Q values is utilized to separate the interference GSD-IC Lee et al. [ 137] Geometric sequence decomposition The interference is separated by considering the sampled signal as a geometric sequence and decomposing it into different non-orthogonal superimposed signals Row sparsity Wang et al. [ 138] Interference sparsity and useful signal row sparsity The regularization constraint problem is introduced by exploiting the sparsity in the interference time domain and the sparsity in the frequency domain rows of the useful echo signal
下载: 导出CSV
-
[1] 黄乐平, 陈旭东. 4D毫米波雷达: 智驾普及的新路径[EB/OL]. https://xueqiu.com/3161724413/247489207, 2023.HUANG Leping and CHEN Xudong. 4D millimeter-wave radar: A new path to the popularization of smart driving[EB/OL]. https://xueqiu.com/3161724413/247489207, 2023. [2] LI Gang, SIT Y L, MANCHALA S, et al. Novel 4D 79 GHz radar concept for object detection and active safety applications[C]. The 2019 12th German Microwave Conference(GeMiC), Stuttgart, Germany, 2019: 87–90. doi: 10.23919/GEMIC.2019.8698172. [3] QIAN Kun, HE Zhaoyuan, and ZHANG Xinyu. 3D point cloud generation with millimeter-wave radar[J]. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2020, 4(4): 148. doi: 10.1145/3432221. [4] ENGELS F, HEIDENREICH P, WINTERMANTEL M, et al. Automotive radar signal processing: Research directions and practical challenges[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(4): 865–878. doi: 10.1109/JSTSP.2021.3063666. [5] 林凤泰, 严蘋蘋, 张慧, 等. 基于最近迭代点的毫米波雷达点云数据处理方法[J]. 信号处理, 2023, 39(2): 288–297. doi: 10.16798/j.issn.1003-0530.2023.02.010.LIN Fengtai, YAN Pinpin, ZHANG Hui, et al. Iterative closest point method for point cloud data processing of millimeter wave radar[J]. Journal of Signal Processing, 2023, 39(2): 288–297. doi: 10.16798/j.issn.1003-0530.2023.02.010. [6] WEISHAUPT F, APPENRODT N, TILLY J F, et al. PreCFAR gridmaps for automotive radar[C]. The 2021 18th European Radar Conference (EuRAD), London, United Kingdom, 2022: 161–164. doi: 10.23919/EuRAD50154.2022.9784455. [7] WEI Ziping, LI Bin, FENG Tao, et al. Area-based CFAR target detection for automotive millimeter-wave radar[J]. IEEE Transactions on Vehicular Technology, 2023, 72(3): 2891–2906. doi: 10.1109/TVT.2022.3216013. [8] 兰吕鸿康, 黄岩, 郑凯航, 等. 毫米波雷达自适应门限点云成像方法研究[J]. 信号处理, 2022, 38(10): 2009–2020. doi: 10.16798/j.issn.1003-0530.2022.10.002.LAN Lühongkang, HUANG Yan, ZHENG Kaihang, et al. Research on adaptive threshold point cloud imaging method of millimeter-wave radar[J]. Journal of Signal Processing, 2022, 38(10): 2009–2020. doi: 10.16798/j.issn.1003-0530.2022.10.002. [9] DANZER A, GRIEBEL T, BACH M, et al. 2D car detection in radar data with pointnets[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 2019: 61–66. doi: 10.1109/ITSC.2019.8917000. [10] JIN Feng, SENGUPTA A, CAO Siyang, et al. Mmwave radar point cloud segmentation using GMM in multimodal traffic monitoring[C]. 2020 IEEE International Radar Conference(RADAR), Washington, USA, 2020: 732–737. doi: 10.1109/RADAR42522.2020.9114662. [11] XU Fenglei, WANG Huan, HU Bingwen, et al. Road boundaries detection based on modified occupancy grid map using millimeter-wave radar[J]. Mobile Networks and Applications, 2020, 25(4): 1496–1503. doi: 10.1007/s11036-019-01378-5. [12] JIN Yi, PROPHET R, DELIGIANNIS A, et al. Point-cloud-based road course estimation on automotive radar data[C]. 2021 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel Aviv, Israel, 2021: 29–34. doi: 10.1109/COMCAS52219.2021.9629037. [13] CHENG Yuwei, SU Jingran, CHEN Hongyu, et al. A new automotive radar 4D point clouds detector by using deep learning[C]. 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, Canada, 2021: 8398–8402. doi: 10.1109/ICASSP39728.2021.9413682. [14] CHENG Yuwei, SU Jingran, JIANG Mengxin, et al. A novel radar point cloud generation method for robot environment perception[J]. IEEE Transactions on Robotics, 2022, 38(6): 3754–3773. doi: 10.1109/TRO.2022.3185831. [15] JIANG Mengjie, XU Gang, PEI Hao, et al. 4D high-resolution imagery of point clouds for automotive mmWave radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2023. doi: 10.1109/TITS.2023.3258688. [16] FRANCESCHI R and RACHKOV D. Deep learning-based radar detector for complex automotive scenarios[C]. 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 2022: 303–308. doi: 10.1109/IV51971.2022.9827045. [17] TAN Bin, MA Zhixiong, ZHU Xichan, et al. 3-D object detection for multiframe 4-D automotive millimeter-wave radar point cloud[J]. IEEE Sensors Journal, 2023, 23(11): 11125–11138. doi: 10.1109/JSEN.2022.3219643. [18] SUN Yue, HUANG Zhuoming, ZHANG Honggang, et al. 3DRIMR: 3D reconstruction and imaging via mmWave radar based on deep learning[C]. 2021 IEEE International Performance, Computing, and Communications Conference (IPCCC), Austin, USA, 2021: 1–8. doi: 10.1109/IPCCC51483.2021.9679394. [19] SUN Yue, ZHANG Honggang, HUANG Zhuoming, et al. DeepPoint: A deep learning model for 3D reconstruction in point clouds via mmWave radar[J]. arXiv: 2109.09188, 2021. doi: 10.48550/arXiv.2109.09188. [20] HUANG Yan, ZHANG Hui, GUO Kunpeng, et al. Density-based vehicle detection approach for automotive millimeter-wave radar[C]. The 2020 IEEE 3rd International Conference on Electronic Information and Communication Technology (ICEICT), Shenzhen, China, 2020: 534–537. doi: 10.1109/ICEICT51264.2020.9334238. [21] DREHER M, ERÇELIK E, BÄNZIGE T, et al. Radar-based 2D car detection using deep neural networks[C]. The 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020: 1–8. doi: 10.1109/ITSC45102.2020.9294546. [22] XU Baowei, ZHANG Xinyu, WANG Li, et al. RPFA-Net: A 4D RaDAR pillar feature attention network for 3D object detection[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 3061–3066. doi: 10.1109/ITSC48978.2021.9564754. [23] LANG A H, VORA S, CAESAR H, et al. PointPillars: Fast encoders for object detection from point clouds[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, USA, 2019: 12689–12697. doi: 10.1109/CVPR.2019.01298. [24] MEYER M and KUSCHK G. Automotive radar dataset for deep learning based 3D object detection[C]. The 2019 16th European Radar Conference (EuRAD), Paris, France, 2019: 129–132. [25] OUAKNINE A, NEWSON A, REBUT J, et al. CARRADA dataset: Camera and automotive radar with range-angle-Doppler annotations[C]. The 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 2021: 5068–5075, doi: 10.1109/ICPR48806.2021.9413181. [26] CAESAR H, BANKITI V, LANG A H, et al. NuScenes: A multimodal dataset for autonomous driving[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 11618–11628. doi: 10.1109/CVPR42600.2020.01164. [27] KRAMER A, HARLOW K, WILLIAMS C, et al. ColoRadar: The direct 3D millimeter wave radar dataset[J]. International Journal of Robotics Research, 2022, 41(4): 351–360. doi: 10.1177/02783649211068535. [28] WANG Yizhou, JIANG Zhongyu, LI Yudong, et al. RODNet: A real-time radar object detection network cross-supervised by camera-radar fused object 3D localization[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(4): 954–967. doi: 10.1109/JSTSP.2021.3058895. [29] BIJELIC M, GRUBER T, MANNAN F, et al. Seeing through fog without seeing fog: Deep multimodal sensor fusion in unseen adverse weather[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, USA, 2020: 11679–11689. doi: 10.1109/CVPR42600.2020.01170. [30] PALFFY A, POOL E, BARATAM S, et al. Multi-class road user detection with 3+1D radar in the View-of-Delft dataset[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4961–4968. doi: 10.1109/LRA.2022.3147324. [31] PAEK D H, KONG S H, and WIJAYA K T. K-Radar: 4D radar object detection for autonomous driving in various weather conditions[C]. The 36th Conference on Neural Information Processing Systems, New Orleans, USA, 2022: 3819–3829. [32] SCHUMANN O, HAHN M, SCHEINER N, et al. RadarScenes: A real-world radar point cloud data set for automotive applications[C]. The 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 2021: 1–8. doi: 10.23919/FUSION49465.2021.9627037. [33] ZHENG Lianqing, MA Zhixiong, ZHU Xichan, et al. TJ4DRadSet: A 4D radar dataset for autonomous driving[C]. The 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 2022: 493–498. doi: 10.1109/ITSC55140.2022.9922539. [34] MEYER M and KUSCHK G. Deep learning based 3D object detection for automotive radar and camera[C]. The 2019 16th European Radar Conference (EuRAD), Paris, France, 2019: 133–136. [35] NABATI R and QI Hairong. RRPN: Radar region proposal network for object detection in autonomous vehicles[C]. 2019 IEEE International Conference on Image Processing (ICIP), Taipei, China, 2019: 3093–3097. doi: 10.1109/ICIP.2019.8803392. [36] JHA H, LODHI V, and CHAKRAVARTY D. Object detection and identification using vision and radar data fusion system for ground-based navigation[C]. The 2019 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 2019: 590–593. doi: 10.1109/SPIN.2019.8711717. [37] NOBIS F, GEISSLINGER M, WEBER M, et al. A deep learning-based radar and camera sensor fusion architecture for object detection[J]. 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 2019: 1–7. doi: 10.1109/SDF.2019.8916629. [38] CUI Hang, WU Junzhe, ZHANG Jiaming, et al. 3D detection and tracking for on-road vehicles with a monovision camera and dual low-cost 4D mmWave radars[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 2931–2937. doi: 10.1109/ITSC48978.2021.9564904. [39] NABATI R and QI Hairong. Centerfusion: Center-based radar and camera fusion for 3D object detection[C]. 2021 IEEE Winter Conference on Applications of Computer Vision(WACV), Waikoloa, USA, 2021: 1526–1535. doi: 10.1109/WACV48630.2021.00157. [40] JOHN V, NITHILAN M K, MITA S, et al. So-Net: Joint semantic segmentation and obstacle detection using deep fusion of monocular camera and radar[C]. Pacific-Rim Symposium on Image and Video Technology (PSIVT), Sydney, Australia, 2020: 138–148. doi: 10.1007/978-3-030-39770-8_11. [41] CHANG Shuo, ZHANG Yifan, ZHANG Fan, et al. Spatial attention fusion for obstacle detection using mmWave radar and vision sensor[J]. Sensors, 2020, 20(4): 956. doi: 10.3390/s20040956. [42] BANSAL K, RUNGTA K, and BHARADIA D. RadSegNet: A reliable approach to radar camera fusion[J]. arXiv: 2208.03849, 2022. doi: 10.48550/arXiv.2208.03849. [43] LO C C and VANDEWALLE P. RCDPT: Radar-camera fusion dense prediction transformer[C]. 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 2023: 1–5. doi: 10.1109/ICASSP49357.2023.10096129. [44] WU Zizhang, CHEN Guilian, GAN Yuanzhu, et al. MVFusion: Multi-view 3D object detection with semantic-aligned radar and camera fusion[C]. 2023 IEEE International Conference on Robotics and Automation, London, UK, 2023: 2766–2773. doi: 10.1109/ICRA48891.2023.10161329. [45] SENGUPTA A, CHENG Lei, and CAO Siyang. Robust multiobject tracking using mmwave radar-camera sensor fusion[J]. IEEE Sensors Letters, 2022, 6(10): 5501304. doi: 10.1109/LSENS.2022.3213529. [46] ZHOU Taohua, JIANG Kun, WANG Sijia, et al. 3D multiple object tracking with multi-modal fusion of low-cost sensors for autonomous driving[C]. The 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 2022: 1750–1757. doi: 10.1109/ITSC55140.2022.9921854. [47] BAI Jie, LI Sen, HUANG Libo, et al. Robust detection and tracking method for moving object based on radar and camera data fusion[J]. IEEE Sensors Journal, 2021, 21(9): 10761–10774. doi: 10.1109/JSEN.2021.3049449. [48] SENGUPTA A, YOSHIZAWA A, and CAO Siyang. Automatic radar-camera dataset generation for sensor-fusion applications[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2875–2882. doi: 10.1109/LRA.2022.3144524. [49] DONG Xu, ZHUANG Binnan, MAO Yunxiang, et al. Radar camera fusion via representation learning in autonomous driving[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Nashville, USA, 2021: 1672–1681. doi: 10.1109/CVPRW53098.2021.00183. [50] FEIL P, KRAUS T, and MENZEL W. Short range mm-Wave SAR for surveillance and security applications[C]. The 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 2010: 1–4. [51] IQBAL H, SAJJAD M B, MUELLER M, et al. SAR imaging in an automotive scenario[C]. The 2015 IEEE 15th Mediterranean Microwave Symposium (MMS), Lecce, Italy, 2015: 1–4. doi: 10.1109/MMS.2015.7375430. [52] JIANG Chenghao, TANG Shiyang, ZHANG Linrang, et al. Real data imaging approach design for automotive SAR experiments[C]. 2021 CIE International Conference on Radar (Radar), Haikou, China, 2021: 386–388. doi: 10.1109/Radar53847.2021.10028054. [53] XU Gang, PEI Hao, JIANG Mengjie, et al. High-resolution mmWave SAR imagery for automotive parking assistance[J]. IEEE Journal on Miniaturization for Air and Space Systems, 2023, 4(1): 54–61. doi: 10.1109/JMASS.2022.3226771. [54] WU Huaming and ZWICK T. Automotive SAR for parking lot detection[C]. 2009 German Microwave Conference, Munich, Germany, 2009: 1–8. doi: 10.1109/GEMIC.2009.4815910. [55] GUMBMANN F, TRAN H P, WEINZIERL J, et al. Optimization of a fast scanning millimetre-wave short range SAR imaging system[C]. 2007 European Radar Conference, Munich, Germany, 2007: 24–27. doi: 10.1109/EURAD.2007.4404927. [56] SRIHARSHA NAG T S, VANDANA G S, PARDHASARADHI B, et al. SAR imaging with automotive radar: Range migration algorithm, experiment, and future directions in automotive vehicle[C]. The 2022 IEEE 7th International Conference on Recent Advances and Innovations in Engineering (ICRAIE), Mangalore, India, 2022: 382–387. doi: 10.1109/ICRAIE56454.2022.10054316. [57] ZHANG Yan, ZHAO Jie, ZHANG Bingchen, et al. RMA-based azimuth-range decouple method for automotive SAR sparse imaging[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3480–3492. doi: 10.1109/TAES.2022.3226161. [58] LEE S, JUNG Y, LEE M, et al. Compressive sensing-based SAR image reconstruction from sparse radar sensor data acquisition in automotive FMCW radar system[J]. Sensors, 2021, 21(21): 7283. doi: 10.3390/s21217283. [59] IQBAL H, SCHARTEL M, ROOS F, et al. Implementation of a SAR demonstrator for automotive imaging[C]. The 2018 18th Mediterranean Microwave Symposium (MMS), Istanbul, Turkey, 2018: 240–243. doi: 10.1109/MMS.2018.8611814. [60] ULANDER L M H, HELLSTEN H, and STENSTROM G. Synthetic-aperture radar processing using fast factorized back-projection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 760–776. doi: 10.1109/TAES.2003.1238734. [61] GISDER T, HARRER F, and BIEBL E. Application of a stream-based SAR-backprojection approach for automotive environment perception[C]. The 2018 19th International Radar Symposium (IRS), Bonn, Germany, 2018: 1–10. doi: 10.23919/IRS.2018.8447924. [62] FARHADI M, FEGER R, FINK J, et al. Adaption of fast factorized back-projection to automotive SAR applications[C]. The 2019 16th European Radar Conference (EuRAD), Paris, France, 2019: 261–264. [63] FARHADI M, FEGER R, FINK J, et al. Synthetic aperture radar imaging of moving targets for automotive applications[C]. The 2021 18th European Radar Conference (EuRAD), London, United Kingdom, 2022: 453–456. doi: 10.23919/EuRAD50154.2022.9784564. [64] MANZONI M, TEBALDINI S, MONTI-GUARNIERI A V, et al. Multipath in automotive MIMO SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5202612. doi: 10.1109/TGRS.2023.3240705. [65] RIZZI M, MANZONI M, TEBALDINI S, et al. Multi-beam automotive SAR imaging in urban scenarios[C]. 2022 IEEE Radar Conference (RadarConf22), New York City, USA, 2022: 1–6. doi: 10.1109/RadarConf2248738.2022.9764331. [66] WRIGHT D, GISHKORI S, DANIEL L, et al. Adaptive integration time in automotive SAR[C]. 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 2020: 1–6. doi: 10.1109/RadarConf2043947.2020.9266411. [67] TAGLIAFERRI D, RIZZI M, TEBALDINI S, et al. Cooperative synthetic aperture radar in an urban connected car scenario[C]. The 2021 1st IEEE International Online Symposium on Joint Communications & Sensing (JC&S), Dresden, Germany, 2021: 1–4. doi: 10.1109/JCS52304.2021.9376348. [68] FEGER R, HADERER A, and STELZER A. Experimental verification of a 77-GHz synthetic aperture radar system for automotive applications[C]. 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 2017: 111–114. doi: 10.1109/ICMIM.2017.7918869. [69] TAGLIAFERRI D, RIZZI M, NICOLI M, et al. Navigation-aided automotive SAR for high-resolution imaging of driving environments[J]. IEEE Access, 2021, 9: 35599–35615. doi: 10.1109/ACCESS.2021.3062084. [70] WU Huaming and ZWICK T. A novel motion compensation algorithm for automotive SAR: Simulations and experiments[C]. German Microwave Conference Digest of Papers, Berlin, Germany, 2010: 222–226. [71] WU Huaming, ZWIRELLO L, LI Xuyang, et al. Motion compensation with one-axis gyroscope and two-axis accelerometer for automotive SAR[C]. 2011 German Microwave Conference, Darmstadt, Germany, 2011: 1–4. [72] IQBAL H, LÖFFLER A, MEJDOUB M N, et al. Realistic SAR implementation for automotive applications[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 306–309. doi: 10.1109/EuRAD48048.2021.00085. [73] STEINER M, GREBNER T, and WALDSCHMIDT C. Millimeter-wave SAR-imaging with radar networks based on radar self-localization[J]. IEEE Transactions on Microwave Theory and Techniques, 2020, 68(11): 4652–4661. doi: 10.1109/TMTT.2020.2995225. [74] FARHADI M, FEGER R, FINK J, et al. Phase error estimation for automotive SAR[C]. 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 2020: 1–4. doi: 10.1109/ICMIM48759.2020.9298998. [75] FARHADI M, FEGER R, FINK J, et al. Space-variant phase error estimation and correction for automotive SAR[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 310–313. doi: 10.1109/EuRAD48048.2021.00086. [76] MANZONI M, RIZZI M, TEBALDINI S, et al. Residual motion compensation in automotive MIMO SAR imaging[C]. 2022 IEEE Radar Conference (RadarConf22), New York City, USA, 2022: 1–7. doi: 10.1109/RadarConf2248738.2022.9764310. [77] MANZONI M, TAGLIAFERRI D, RIZZI M, et al. Motion estimation and compensation in automotive MIMO SAR[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 1756–1772. doi: 10.1109/TITS.2022.3219542. [78] HU Ruizhi, RAO B S M R, MURTADA A, et al. Automotive squint-forward-looking SAR: High resolution and early warning[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(4): 904–912. doi: 10.1109/JSTSP.2021.3064175. [79] WANG Jianqiu, LIU Kang, LIU Qingping, et al. Azimuth improved radar imaging with virtual array in the forward-looking sight[J]. IEEE Internet of Things Journal, 2022, 9(19): 18867–18879. doi: 10.1109/JIOT.2022.3163163. [80] GISHKORI S, WRIGHT D, DANIEL L, et al. Imaging moving targets for a forward-scanning automotive SAR[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 56(2): 1106–1119. doi: 10.1109/TAES.2019.2925446. [81] GAO Xiangyu, ROY S, and XING Guanbin. MIMO-SAR: A hierarchical high-resolution imaging algorithm for mmWave FMCW radar in autonomous driving[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 7322–7334. doi: 10.1109/TVT.2021.3092355. [82] ZHANG Bangjie, XU Gang, ZHOU Rui, et al. Multi-channel back-projection algorithm for mmWave automotive MIMO SAR imaging with Doppler-division multiplexing[J]. IEEE Journal of Selected Topics in Signal Processing, 2023, 17(2): 445–457. doi: 10.1109/JSTSP.2022.3207902. [83] FARHADI M, FEGER R, FINK J, et al. Automotive synthetic aperture radar imaging using TDM-MIMO[C]. 2021 IEEE Radar Conference (RadarConf21), Atlanta, USA, 2021: 1–6. doi: 10.1109/RadarConf2147009.2021.9455230. [84] SOMMER A, NGO T T, and OSTERMANN J. 3D multiple input single output near field automotive synthetic aperture radar[C]. The 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 2017: 1–10. doi: 10.23919/IRS.2017.8008121. [85] TEBALDINI S, MANZONI M, TAGLIAFERRI D, et al. Sensing the urban environment by automotive SAR imaging: Potentials and challenges[J]. Remote Sensing, 2022, 14(15): 3602. doi: 10.3390/rs14153602. [86] MANZONI M, TEBALDINI S, MONTI-GUARNIERI A V, et al. A comparison of processing schemes for automotive MIMO SAR imaging[J]. Remote Sensing, 2022, 14(19): 4696. doi: 10.3390/rs14194696. [87] TEBALDINI S, RIZZI M, MANZONI M, et al. SAR imaging in automotive scenarios[C]. 2022 Microwave Mediterranean Symposium (MMS), Pizzo Calabro, Italy, 2022: 1–5. doi: 10.1109/MMS55062.2022.9825599. [88] ALBABA A, SAKHNINI A, SAHLI H, et al. Forward-looking MIMO-SAR for enhanced angular resolution[C]. 2022 IEEE Radar Conference (RadarConf22), New York City, USA, 2022: 1–6. doi: 10.1109/RadarConf2248738.2022.9764255. [89] ALBABA A, BAUDUIN M, SAHLI H, et al. Low-complexity forward-looking volumetric SAR for high resolution 3-D radar imaging[C]. 2023 IEEE Radar Conference (RadarConf23), San Antonio, USA, 2023: 1–6. doi: 10.1109/RadarConf2351548.2023.10149651. [90] HAKOBYAN G and YANG Bin. High-performance automotive radar: A review of signal processing algorithms and modulation schemes[J]. IEEE Signal Processing Magazine, 2019, 36(5): 32–44. doi: 10.1109/MSP.2019.2911722. [91] ALLAND S, STARK W, ALI M, et al. Interference in automotive radar systems: Characteristics, mitigation techniques, and current and future research[J]. IEEE Signal Processing Magazine, 2019, 36(5): 45–59. doi: 10.1109/MSP.2019.2908214. [92] XU Zhihuo. Bi-level l1 optimization-based interference reduction for millimeter wave radars[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 728–738. doi: 10.1109/TITS.2022.3215636. [93] KIM Y. Identification of FMCW radar in mutual interference environments using frequency ramp modulation[C]. The 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 2016: 1–3. doi: 10.1109/EuCAP.2016.7481567. [94] KITSUKAWA Y, MITSUMOTO M, MIZUTANI H, et al. An interference suppression method by transmission chirp waveform with random repetition interval in fast-chirp FMCW radar[C]. The 2019 16th European Radar Conference (EuRAD), Paris, France, 2019: 165–168. [95] BECHTER J, SIPPEL C, and WALDSCHMIDT C. Bats-inspired frequency hopping for mitigation of interference between automotive radars[C]. 2016 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), San Diego, USA, 2016: 1–4. doi: 10.1109/ICMIM.2016.7533928. [96] HOSSAIN A, ELSHAFIEY I, and AL-SANIE A. Mutual interference mitigation in automotive radars under realistic road environments[C]. The 2017 8th International Conference on Information Technology (ICIT), Amman, Jordan, 2017: 895–900. doi: 10.1109/ICITECH.2017.8079965. [97] LUO Tangnian, WU C H E, and CHEN Y J E. A 77-GHz CMOS automotive radar transceiver with anti-interference function[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2013, 60(12): 3247–3255. doi: 10.1109/TCSI.2013.2265974. [98] YANG Xiaokang, ZHANG Kunfan, WANG Ting, et al. Anti-interference waveform design for automotive radar[C]. The 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 2017: 14–17. doi: 10.1109/IAEAC.2017.8053967. [99] UYSAL F. Phase-coded FMCW automotive radar: System design and interference mitigation[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 270–281. doi: 10.1109/TVT.2019.2953305. [100] LIU T H, HSU M L, and TSAI Z M. Mutual interference of pseudorandom noise radar in automotive collision avoidance application at 24 GHz[C]. The 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 2016: 1–2. doi: 10.1109/GCCE.2016.7800400. [101] XU Zhihuo and SHI Quan. Interference mitigation for automotive radar using orthogonal noise waveforms[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(1): 137–141. doi: 10.1109/LGRS.2017.2777962. [102] HAKOBYAN G, ARMANIOUS K, and YANG Bin. Interference-aware cognitive radar: A remedy to the automotive interference problem[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(3): 2326–2339. doi: 10.1109/TAES.2019.2947973. [103] BASIREDDY A and MORADI H. OFDM waveform design for interference resistant automotive radars[J]. IEEE Sensors Journal, 2021, 21(14): 15670–15678. doi: 10.1109/JSEN.2021.3057119. [104] BOURDOUX A and BAUDUIN M. PMCW waveform cross-correlation characterization and interference mitigation[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 164–167. doi: 10.1109/EuRAD48048.2021.00051. [105] KHOURY J, RAMANATHAN R, MCCLOSKEY D, et al. RadarMAC: Mitigating radar interference in self-driving cars[C]. The 2016 13th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), London, UK, 2016: 1–9. doi: 10.1109/SAHCN.2016.7733011. [106] MAZHER K U, HEATH R W, GULATI K, et al. Automotive radar interference characterization and reduction by partial coordination[C]. 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 2020: 1–6. doi: 10.1109/RadarConf2043947.2020.9266425. [107] AYDOGDU C, GARCIA N, HAMMARSTRAND L, et al. Radar communications for combating mutual interference of FMCW radars[C]. 2019 IEEE Radar Conference (RadarConf), Boston, USA, 2019: 1–6. doi: 10.1109/RADAR.2019.8835744. [108] AYDOGDU C, KESKIN M F, GARCIA N, et al. RadChat: Spectrum sharing for automotive radar interference mitigation[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(1): 416–429. doi: 10.1109/TITS.2019.2959881. [109] AYDOGDU C, KESKIN M F, and WYMEERSCH H. Automotive radar interference mitigation via multi - hop cooperative radar communications[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 270–273. doi: 10.1109/EuRAD48048.2021.00076. [110] JIN Feng and CAO Siyang. Automotive radar interference mitigation using adaptive noise canceller[J]. IEEE Transactions on Vehicular Technology, 2019, 68(4): 3747–3754. doi: 10.1109/TVT.2019.2901493. [111] WAGNER M, SULEJMANI F, MELZER A, et al. Threshold-free interference cancellation method for automotive FMCW radar systems[C]. 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 2018: 1–4. doi: 10.1109/ISCAS.2018.8351077. [112] BECHTER J, EID K, ROOS F, et al. Digital beamforming to mitigate automotive radar interference[C]. 2016 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), San Diego, USA, 2016: 1–4. doi: 10.1109/ICMIM.2016.7533914. [113] ARTYUKHIN I, ERMOLAEV V, FLAKSMAN A, et al. Development of effective anti-interference primary signal processing for mmWave automotive radar[C]. 2019 International Conference on Engineering and Telecommunication (EnT), Dolgoprudny, Russia, 2019: 1–5. doi: 10.1109/EnT47717.2019.9030561. [114] BECHTER J, RAMEEZ M, and WALDSCHMIDT C. Analytical and experimental investigations on mitigation of interference in a DBF MIMO radar[J]. IEEE Transactions on Microwave Theory and Techniques, 2017, 65(5): 1727–1734. doi: 10.1109/TMTT.2017.2668404. [115] RAMEEZ M, DAHL M, and PETTERSSON M I. Adaptive digital beamforming for interference suppression in automotive FMCW radars[C]. 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, USA, 2018: 252–256. doi: 10.1109/RADAR.2018.8378566. [116] NOZAWA T, MAKINO Y, TAKAYA N, et al. An anti-collision automotive FMCW radar using time-domain interference detection and suppression[C]. International Conference on Radar Systems (Radar 2017), Belfast, Ireland, 2017: 1–5. doi: 10.1049/cp.2017.0366. [117] BARJENBRUCH M, KELLNER D, DIETMAYER K, et al. A method for interference cancellation in automotive radar[C]. 2015 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Heidelberg, Germany, 2015: 1–4. doi: 10.1109/ICMIM.2015.7117925. [118] CHOI J H, LEE H B, CHOI J W, et al. Mutual interference suppression using clipping and weighted-envelope normalization for automotive FMCW radar systems[J]. IEICE Transactions on Communications, 2016, E99.B(1): 280–287. doi: 10.1587/transcom.2015EBP3152. [119] BECHTER J, ROOS F, RAHMAN M, et al. Automotive radar interference mitigation using a sparse sampling approach[C]. 2017 European Radar Conference (EURAD), Nuremberg, Germany, 2017: 90–93. doi: 10.23919/EURAD.2017.8249154. [120] UMEHIRA M, NOZAWA T, MAKINO Y, et al. A novel iterative inter-radar interference reduction scheme for densely deployed automotive FMCW radars[C]. The 2018 19th International Radar Symposium (IRS), Bonn, Germany, 2018: 1–10. doi: 10.23919/IRS.2018.8448223. [121] NEEMAT S, KRASNOV O, and YAROVOY A. An interference mitigation technique for FMCW radar using beat-frequencies interpolation in the STFT domain[J]. IEEE Transactions on Microwave Theory and Techniques, 2019, 67(3): 1207–1220. doi: 10.1109/TMTT.2018.2881154. [122] LIU Zhenyu, LU Wei, WU Jiayan, et al. A PELT-KCN algorithm for FMCW radar interference suppression based on signal reconstruction[J]. IEEE Access, 2020, 8: 45108–45118. doi: 10.1109/ACCESS.2020.2977098. [123] JUNG J, LIM S, KIM J, et al. Interference suppression and signal restoration using kalman filter in automotive radar systems[C]. 2020 IEEE International Radar Conference (RADAR), Washington, USA, 2020: 726–731. doi: 10.1109/RADAR42522.2020.9114723. [124] ALHUMAIDI M and WINTERMANTEL M. Interference avoidance and mitigation in automotive radar[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 172–175. doi: 10.1109/EuRAD48048.2021.00053. [125] WANG Jianping. CFAR-based interference mitigation for FMCW automotive radar systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12229–12238. doi: 10.1109/TITS.2021.3111514. [126] WANG Jianping, DING Min, and YAROVOY A. Matrix-pencil approach-based interference mitigation for FMCW radar systems[J]. IEEE Transactions on Microwave Theory and Techniques, 2021, 69(11): 5099–5115. doi: 10.1109/TMTT.2021.3090798. [127] RAMEEZ M, DAHL M, and PETTERSSON M I. Autoregressive model-based signal reconstruction for automotive radar interference mitigation[J]. IEEE Sensors Journal, 2021, 21(5): 6575–6586. doi: 10.1109/JSEN.2020.3042061. [128] FEI Tai, GUANG Honghao, SUN Yuliang, et al. An efficient sparse sensing based interference mitigation approach for automotive radar[C]. The 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021: 274–277. doi: 10.1109/EuRAD48048.2021.00077. [129] YANG Shuai and SHANG Xiaolei. Iterative approaches to interference mitigation for automotive radar[C]. 2022 IEEE Radar Conference (RadarConf22), New York City, USA, 2022: 1–5. doi: 10.1109/RadarConf2248738.2022.9764221. [130] UYSAL F and SANKA S. Mitigation of automotive radar interference[C]. 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, USA, 2018: 405–410. doi: 10.1109/RADAR.2018.8378593. [131] WU Jiayan, YANG Siyuan, LU Wei, et al. Iterative modified threshold method based on EMD for interference suppression in FMCW radars[J]. IET Radar, Sonar & Navigation, 2020, 14(8): 1219–1228. doi: 10.1049/iet-rsn.2020.0092. [132] LEE S, LEE J Y, and KIM S C. Mutual interference suppression using wavelet denoising in automotive FMCW radar systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 887–897. doi: 10.1109/TITS.2019.2961235. [133] CORREAS-SERRANO A and GONZALEZ-HUICI M A. Sparse reconstruction of chirplets for automotive FMCW radar interference mitigation[C]. 2019 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Detroit, USA, 2019: 1–4. doi: 10.1109/ICMIM.2019.8726758. [134] WANG Jianping, DING Min, and YAROVOY A. Interference mitigation for FMCW radar with sparse and low-rank hankel matrix decomposition[J]. IEEE Transactions on Signal Processing, 2022, 70: 822–834. doi: 10.1109/TSP.2022.3147863. [135] LIU Zhenyu, WU Jiayan, YANG Siyuan, et al. DOA estimation method based on EMD and MUSIC for mutual interference in FMCW automotive radars[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 3504005. doi: 10.1109/LGRS.2021.3058729. [136] XU Zhihuo and YUAN Min. An interference mitigation technique for automotive millimeter wave radars in the tunable Q-factor wavelet transform domain[J]. IEEE Transactions on Microwave Theory and Techniques, 2021, 69(12): 5270–5283. doi: 10.1109/TMTT.2021.3121322. [137] LEE W H and LEE S. Geometric sequence decomposition-based interference cancellation in automotive radar systems[J]. IEEE Access, 2022, 10: 4318–4327. doi: 10.1109/ACCESS.2022.3141543. [138] WANG Yunxuan, HUANG Yan, WEN Cai, et al. Mutual interference mitigation for automotive FMCW radar with time and frequency domain decomposition[J]. IEEE Transactions on Microwave Theory and Techniques. doi: 10.1109/TMTT.2023.3275816. [139] MUN J, KIM H, and LEE J. A deep learning approach for automotive radar interference mitigation[C]. The 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, USA, 2018: 1–5. doi: 10.1109/VTCFall.2018.8690848. [140] ROCK J, TOTH M, MESSNER E, et al. Complex signal denoising and interference mitigation for automotive radar using convolutional neural networks[C]. The 2019 22th International Conference on Information Fusion (FUSION), Ottawa, Canada, 2019: 1–8. doi: 10.23919/FUSION43075.2019.9011164. [141] MUN J, HA S, and LEE J. Automotive radar signal interference mitigation using RNN with self attention[C]. 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 2020: 3802–3806. doi: 10.1109/ICASSP40776.2020.9053013. [142] RISTEA N C, ANGHEL A, and IONESCU R T. Fully convolutional neural networks for automotive radar interference mitigation[C]. The 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, Canada, 2020: 1–5. doi: 10.1109/VTC2020-Fall49728.2020.9348690. [143] FUCHS J, DUBEY A, LÜBKE M, et al. Automotive radar interference mitigation using a convolutional autoencoder[C]. 2020 IEEE International Radar Conference (RADAR), Washington, USA, 2020: 315–320. doi: 10.1109/RADAR42522.2020.9114641. [144] ROCK J, ROTH W, TOTH M, et al. Resource-efficient deep neural networks for automotive radar interference mitigation[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(4): 927–940. doi: 10.1109/JSTSP.2021.3062452. -




































计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

