
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Target Detection in Sea Clutter Using a Three-feature Prediction-based Method(in English)
-
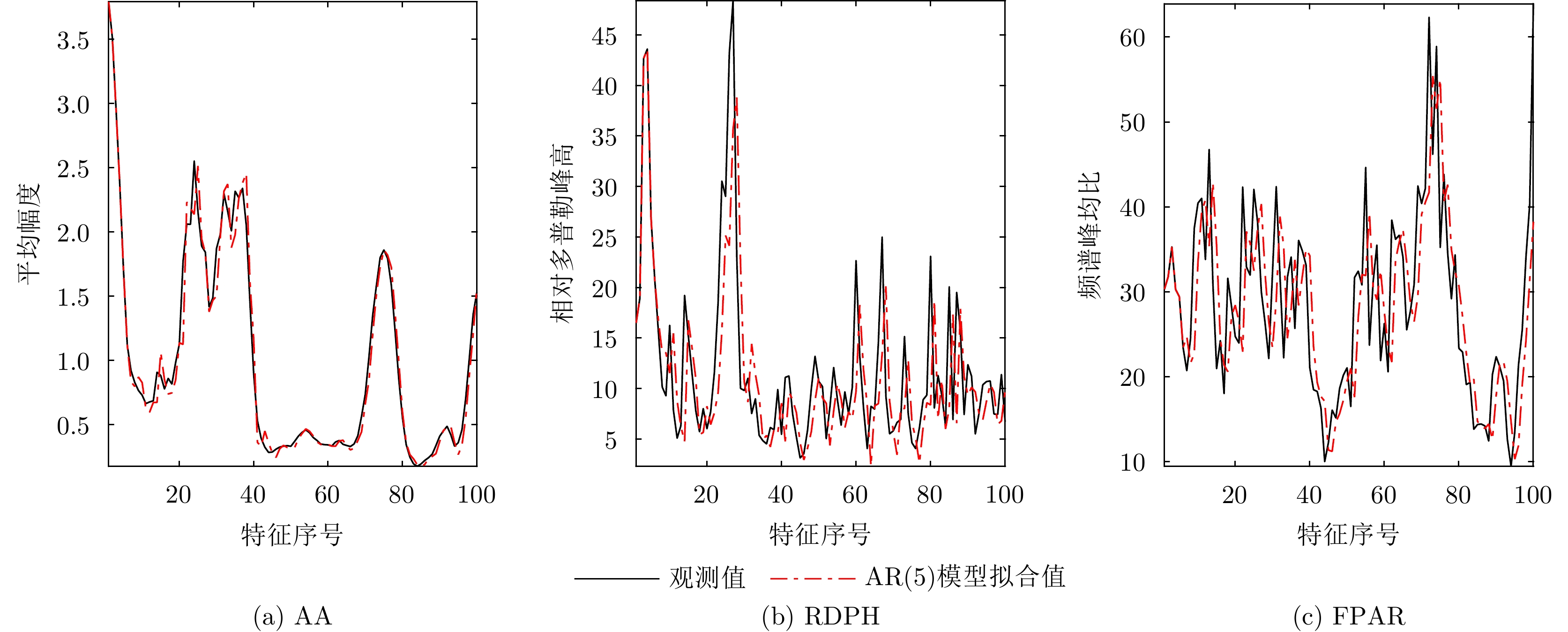
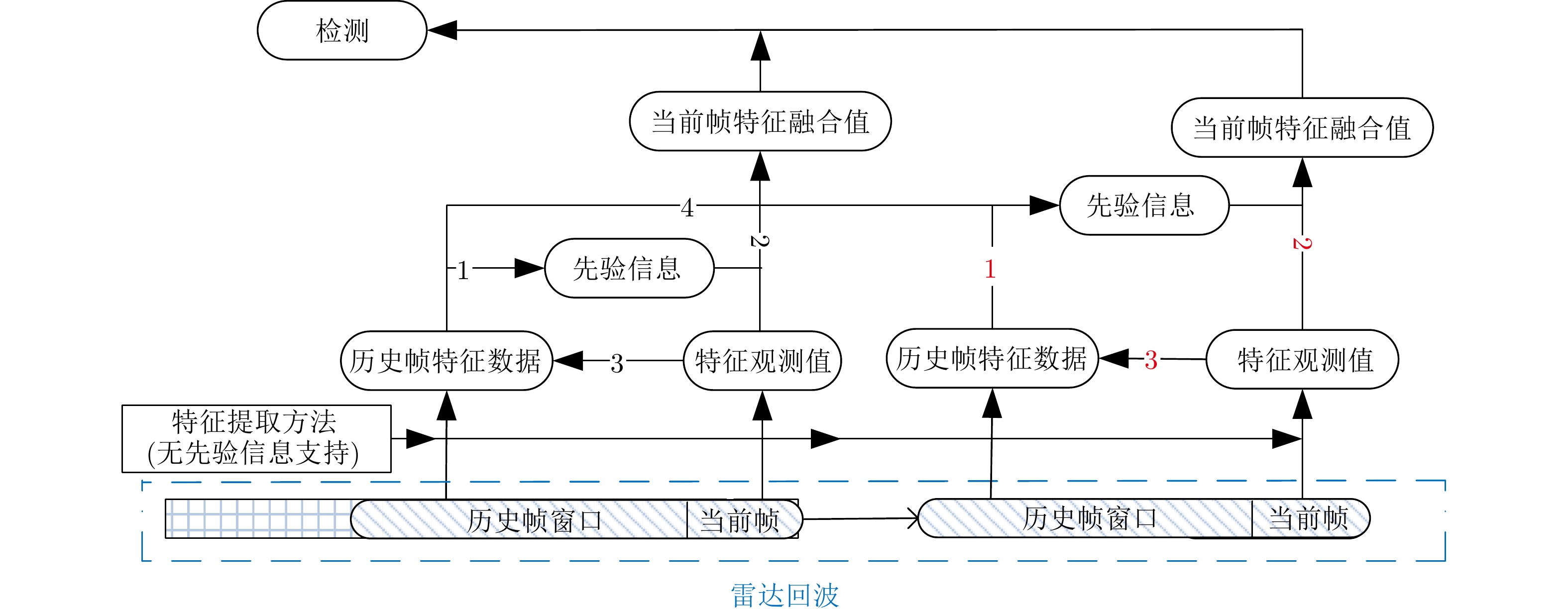
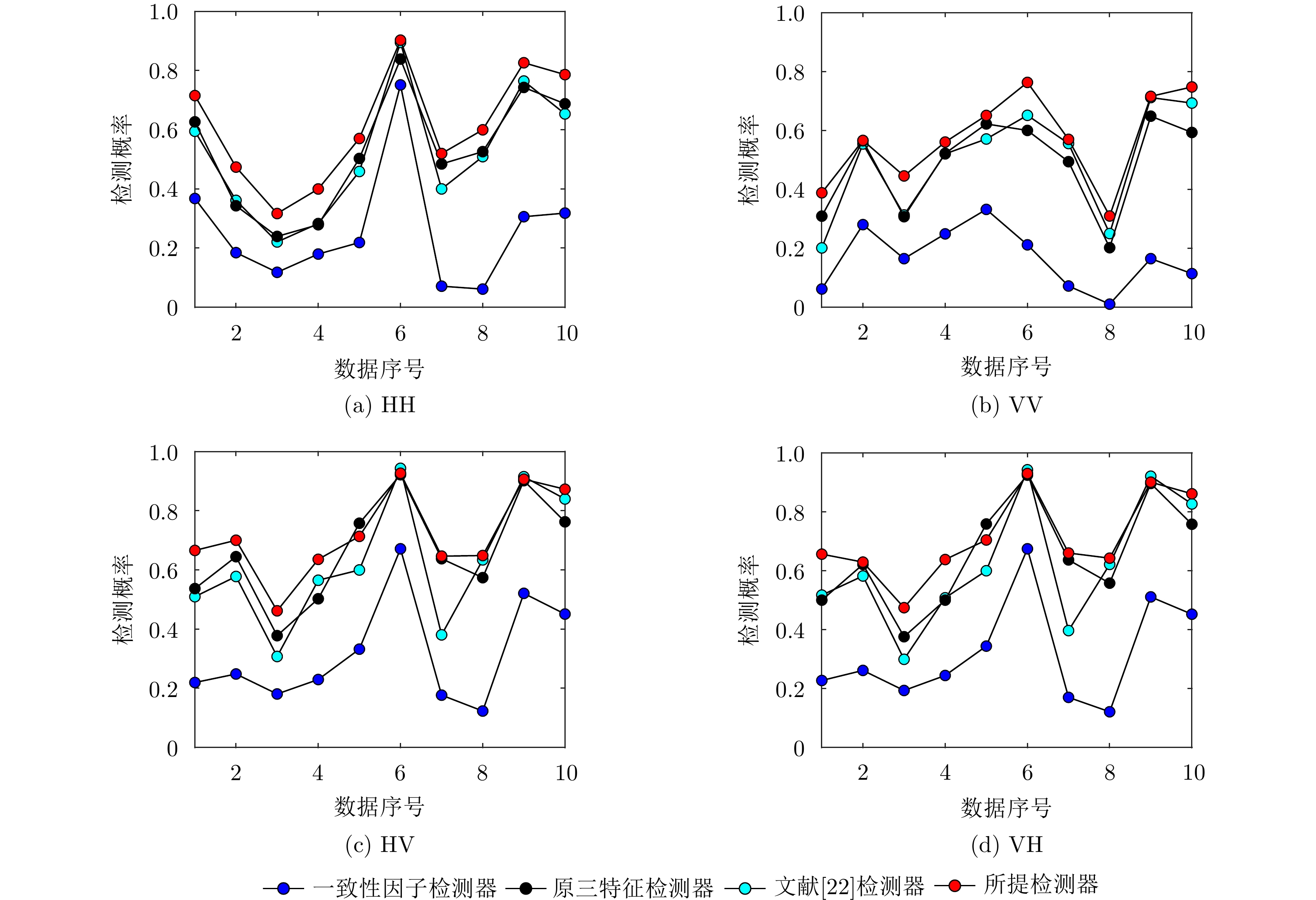
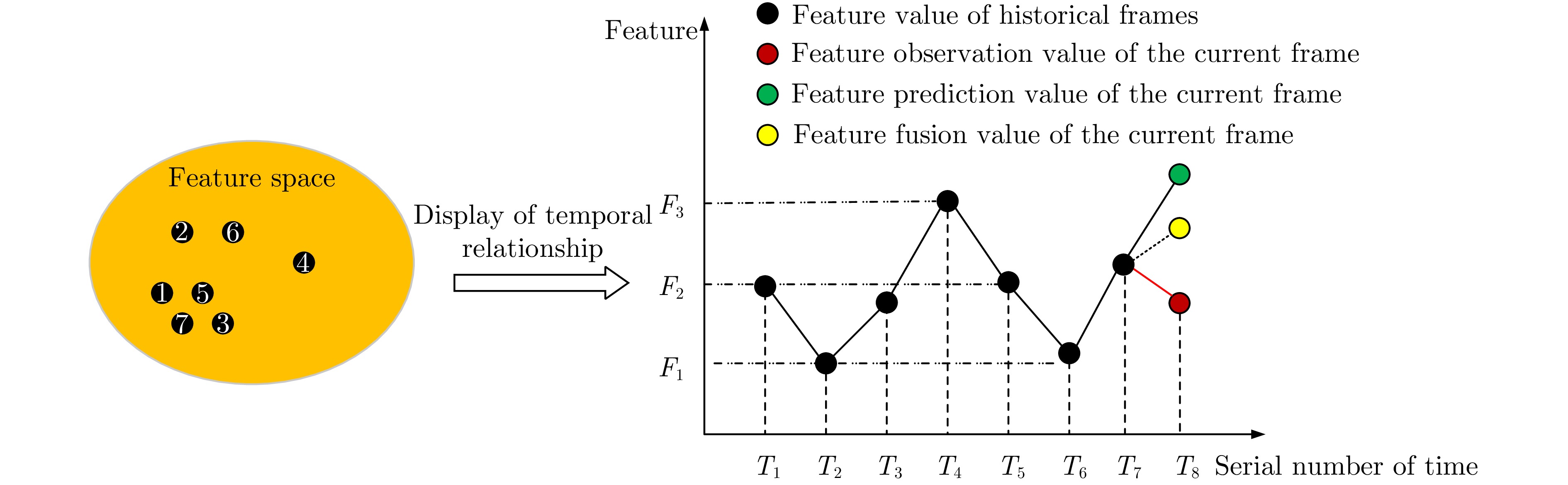
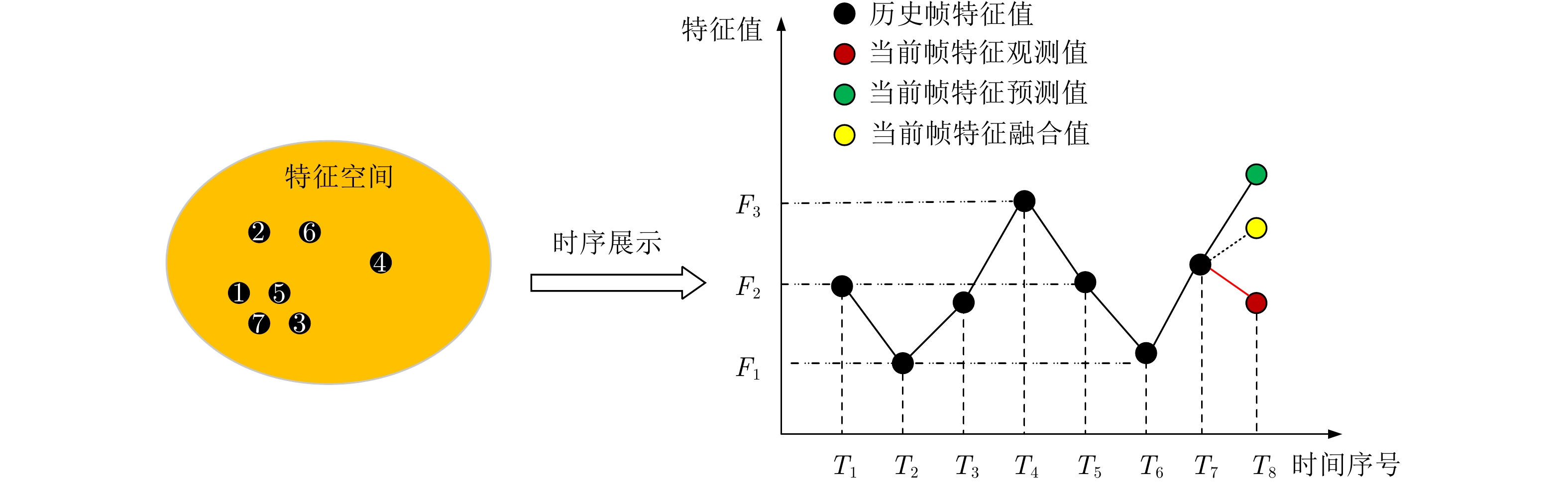
摘要: 特征检测方法是解决海杂波中小目标检测问题的重要途径,其根据特征值是否在判决区域内判断目标有无,几乎不考虑特征间的时序信息。事实上,历史帧数据与当前帧数据的时序关联性,可以为当前帧特征值的计算提供丰富的先验信息。为此,该文提出了一种使用自回归(AR)模型在特征域对雷达回波进行时序建模和预测的方法,以利用历史帧特征的先验信息。首先,使用AR模型对平均幅度(AA)、相对多普勒峰高(RDPH)、频谱峰均比(FPAR)特征序列进行建模和1步预测分析,验证了对特征序列进行AR建模和预测的可行性。其次,提出利用历史帧特征时序信息作为先验信息的特征值提取方法,在此基础上,提出一种基于三特征预测的小目标检测方法,该方法可有效利用AA, RDPH和FPAR的历史帧特征时序信息。最后,使用实测数据验证了所提方法的有效性。Abstract: Feature-based detection methods are often employed to address the challenges related to small-target detection in sea clutter. These methods determine the presence or absence of a target based on whether the feature value falls within a certain judgment region. However, such methods often overlook the temporal information between features. In fact, the temporal correlation between historical and current frame data can provide valuable a priori information, thereby enabling the calculation of the feature value of the current frame. To this end, this paper proposes a novel method for time-series modeling and prediction of radar echoes using an Auto-Regressive (AR) model in the feature domain, leveraging a priori information from historical frame features. To verify the feasibility of AR modeling and prediction of feature sequences, the AR model was first employed in the modeling and 1-step prediction analysis of Average Amplitude (AA), Relative Doppler Peak Height (RDPH), and Frequency Peak-to-Average Ratio (FPAR) feature sequences. Next, a technique for extracting feature values by utilizing the temporal information of historical frame features as a priori information was proposed. Based on this approach, a small-target detection method predicated on three-feature prediction, which can effectively utilize the temporal information of historical frame features for AA, RDPH, and FPAR, was proposed. Finally, the validity of the proposed method was verified using a measured data set.
-
Key words:
- Target detection /
- Sea clutter /
- Historical frame features /
- Prior information /
- Feature prediction
-

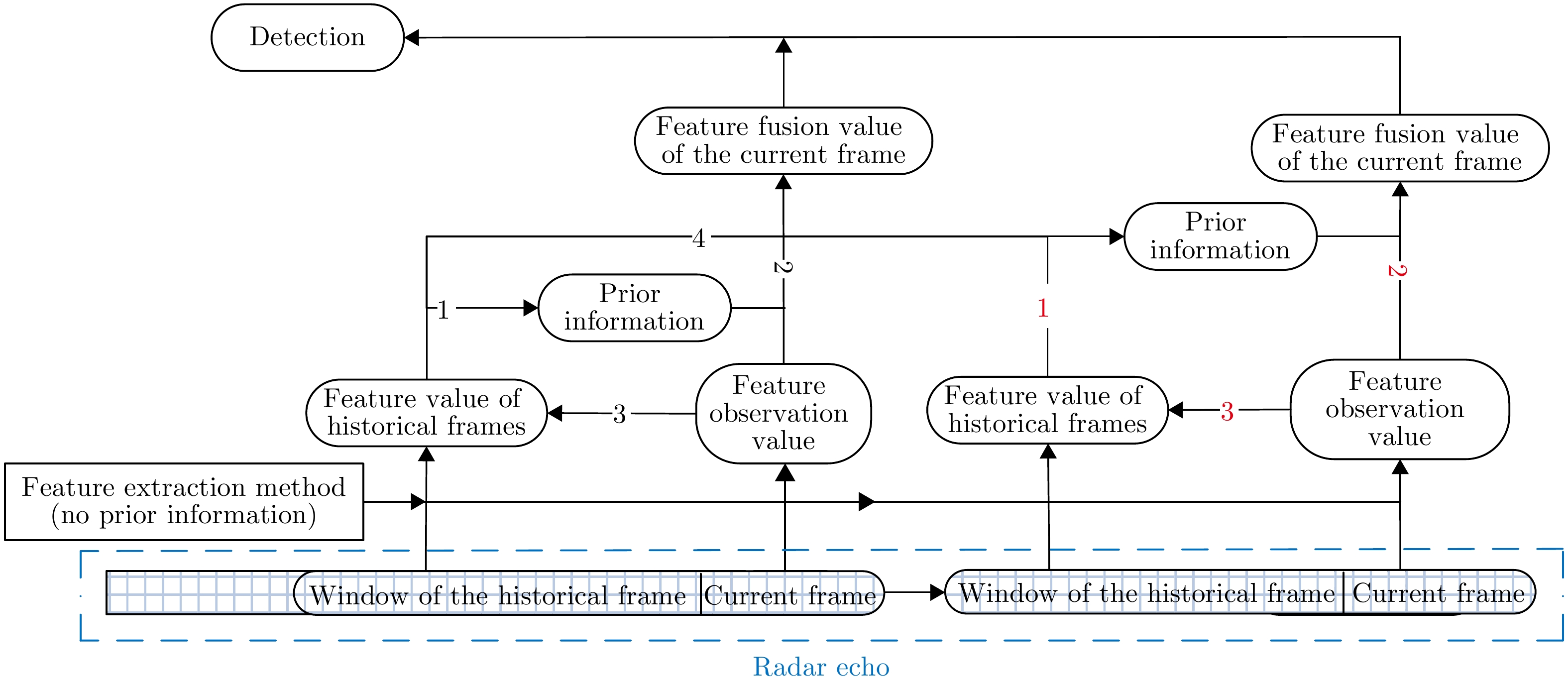
图 1 帧间特征值的时序关系示意图
Figure 1. Schematic diagram of the temporal relationship of the features between frames
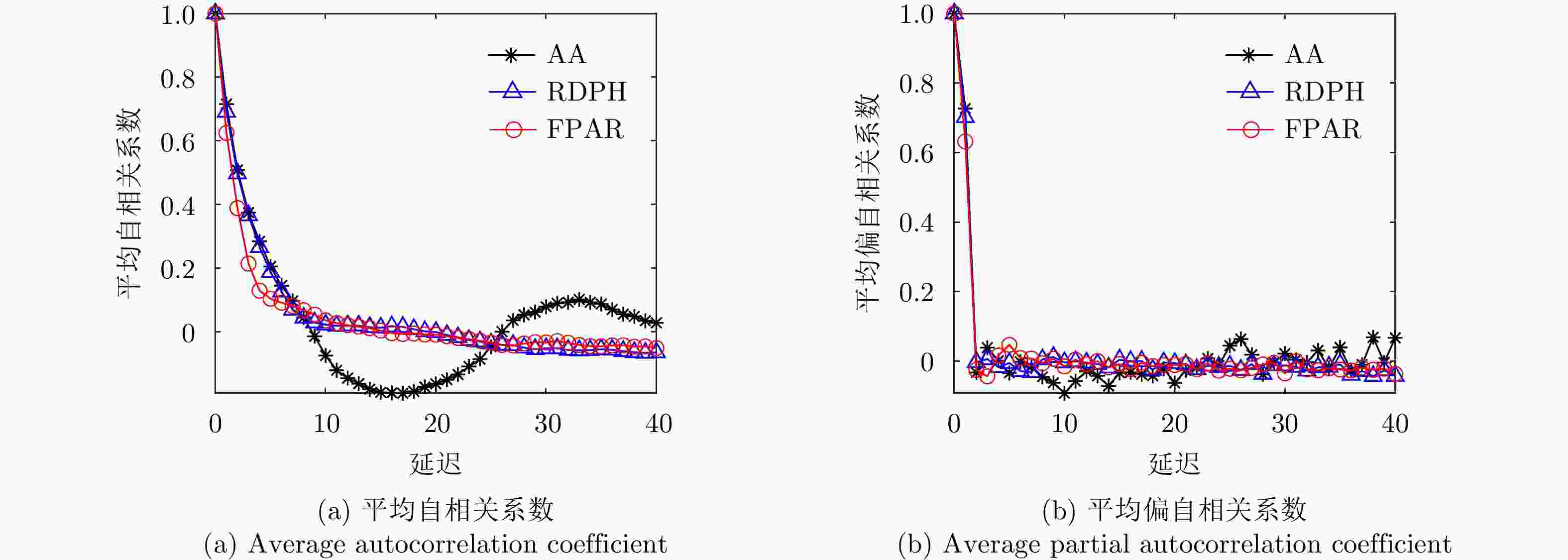
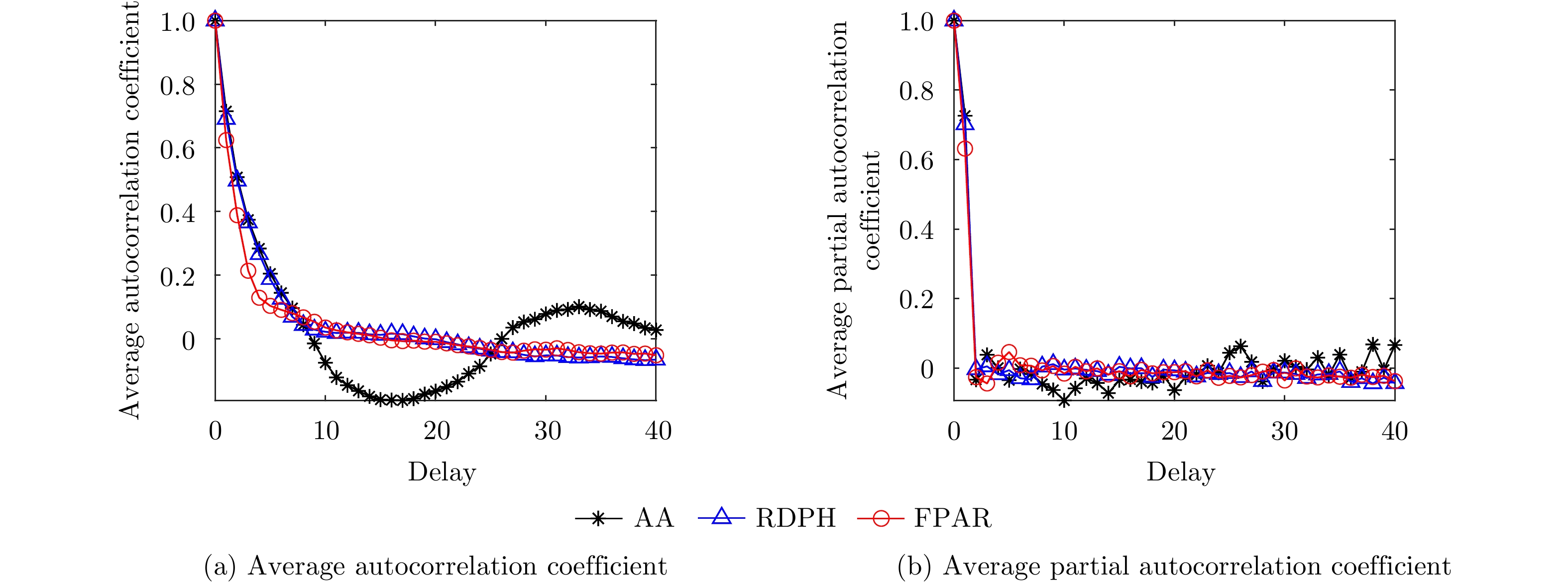
图 2 3种特征的平均自相关系数与平均偏自相关系数
Figure 2. Average autocorrelation coefficient and average partial autocorrelation coefficient for the three features
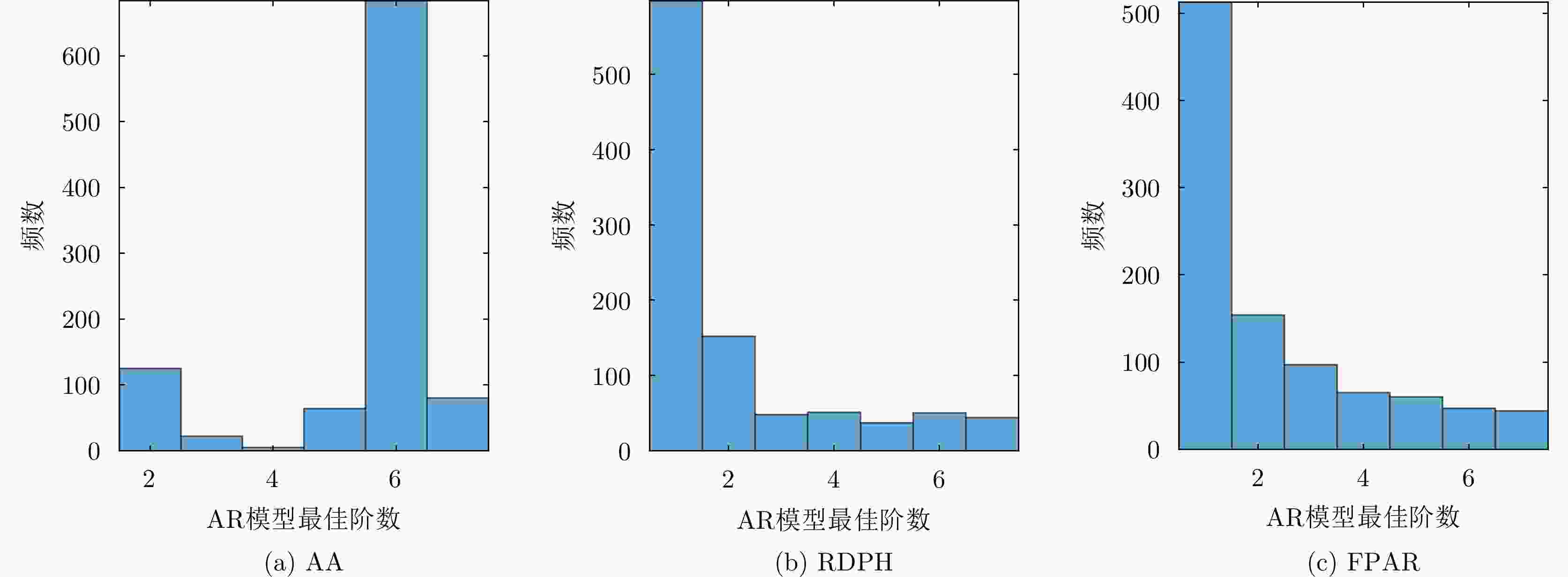
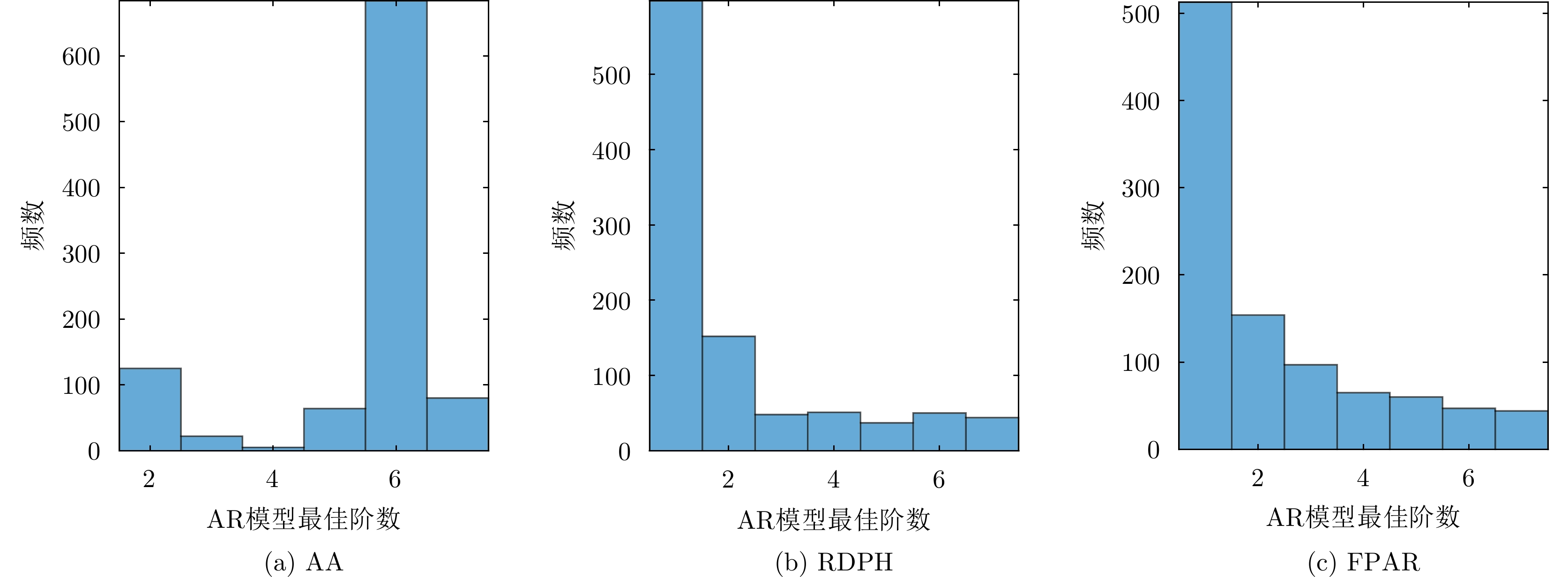
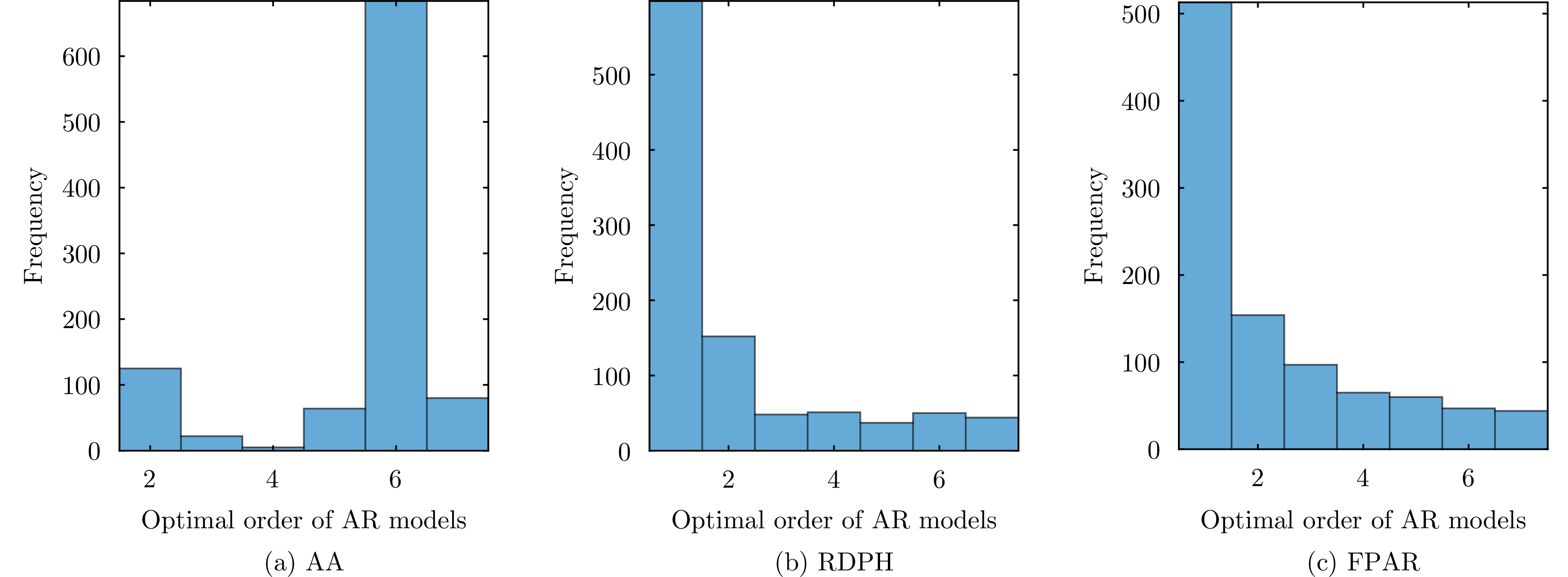
图 3 BIC估计的3种特征序列的AR模型最佳阶数
Figure 3. Optimal order of AR models for the three feature sequences estimated by the BIC

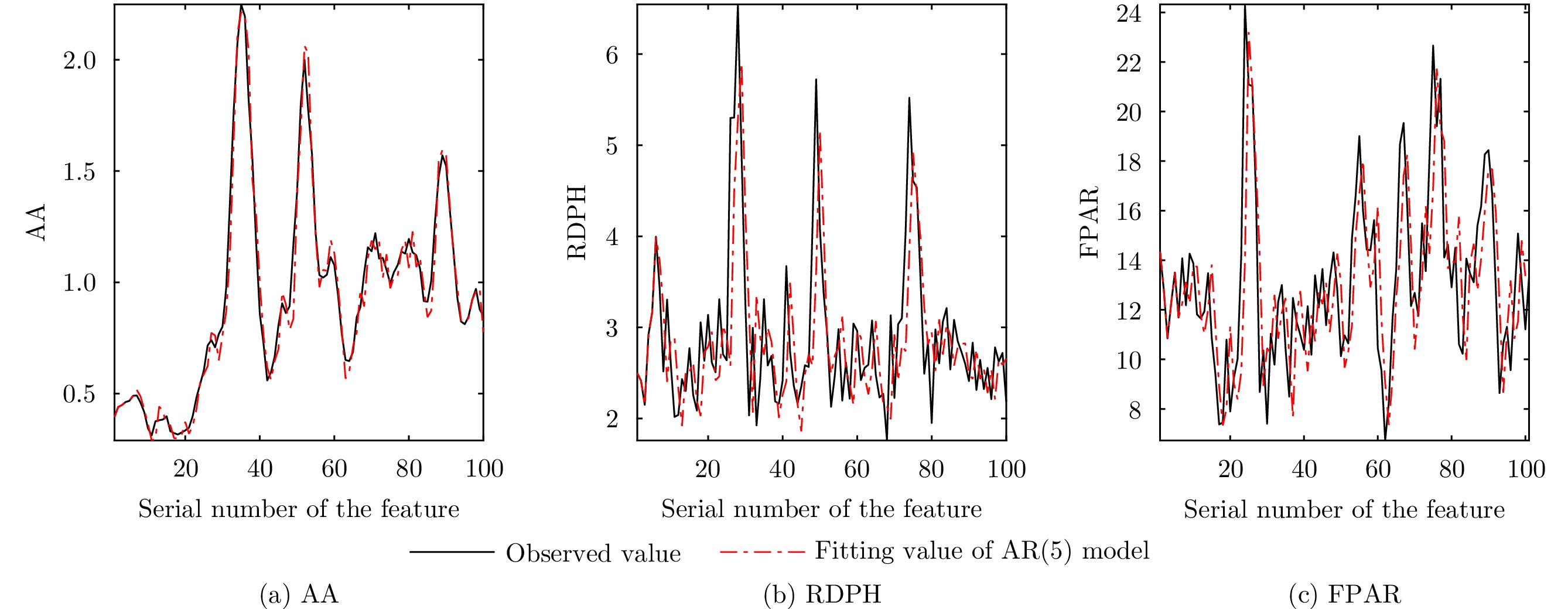
图 4 3种特征的AR模型拟合结果(海杂波)
Figure 4. AR model fitting results for three features (sea clutter)
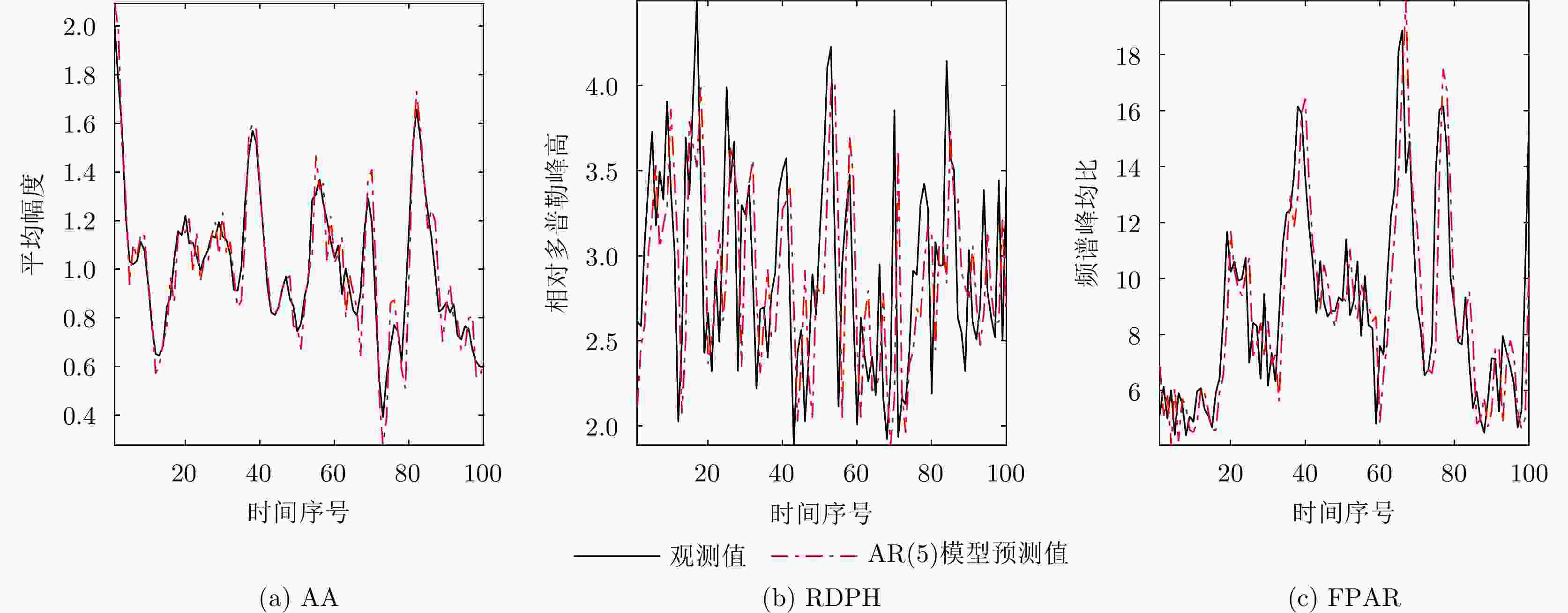
图 5 3种特征的AR模型1步预测结果
Figure 5. 1-step prediction results of AR models with three features
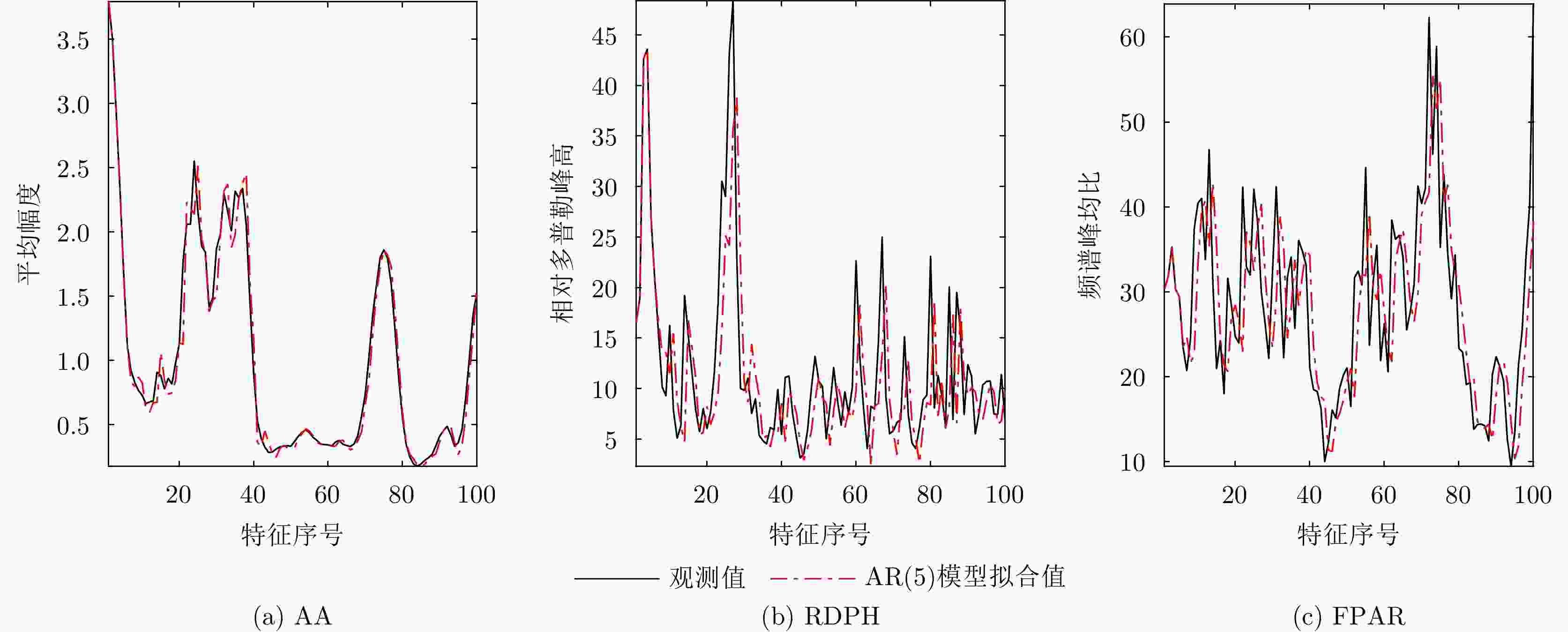
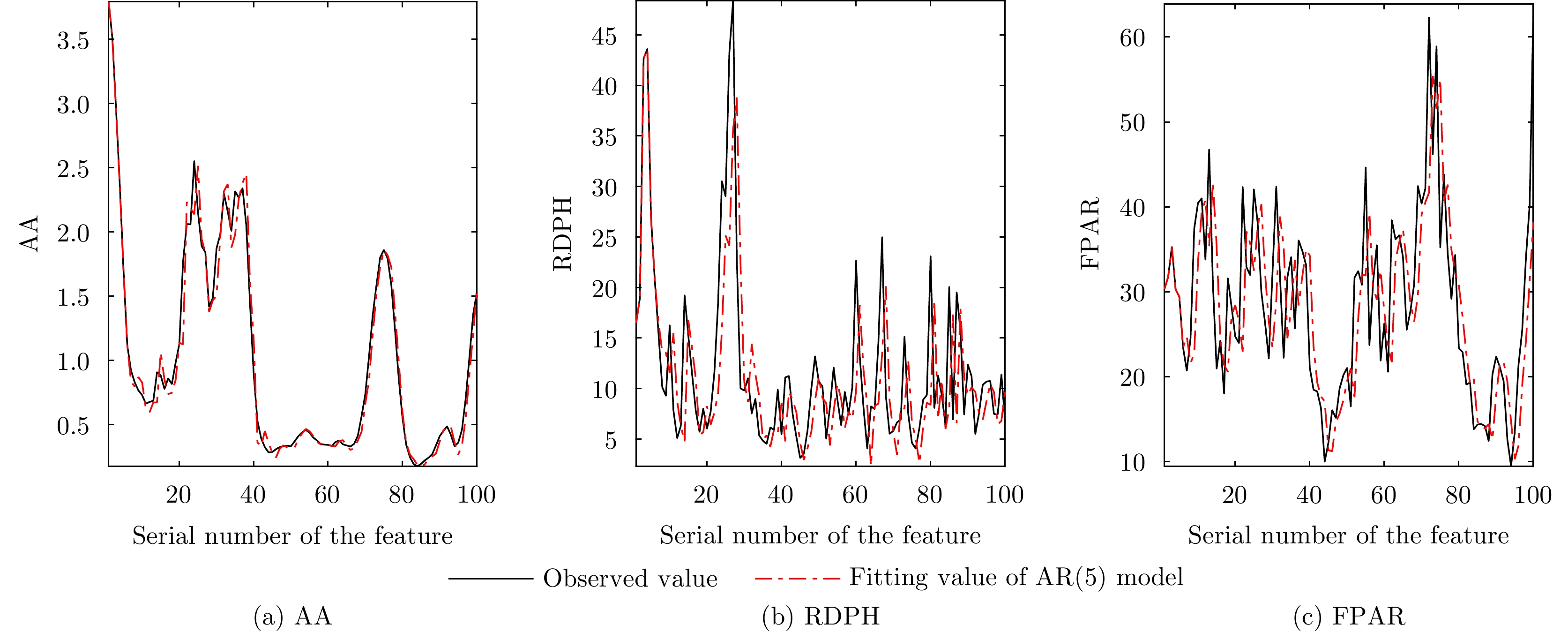
图 6 3种特征的AR模型拟合结果(含目标回波)
Figure 6. AR model fitting results for three features (target echo)
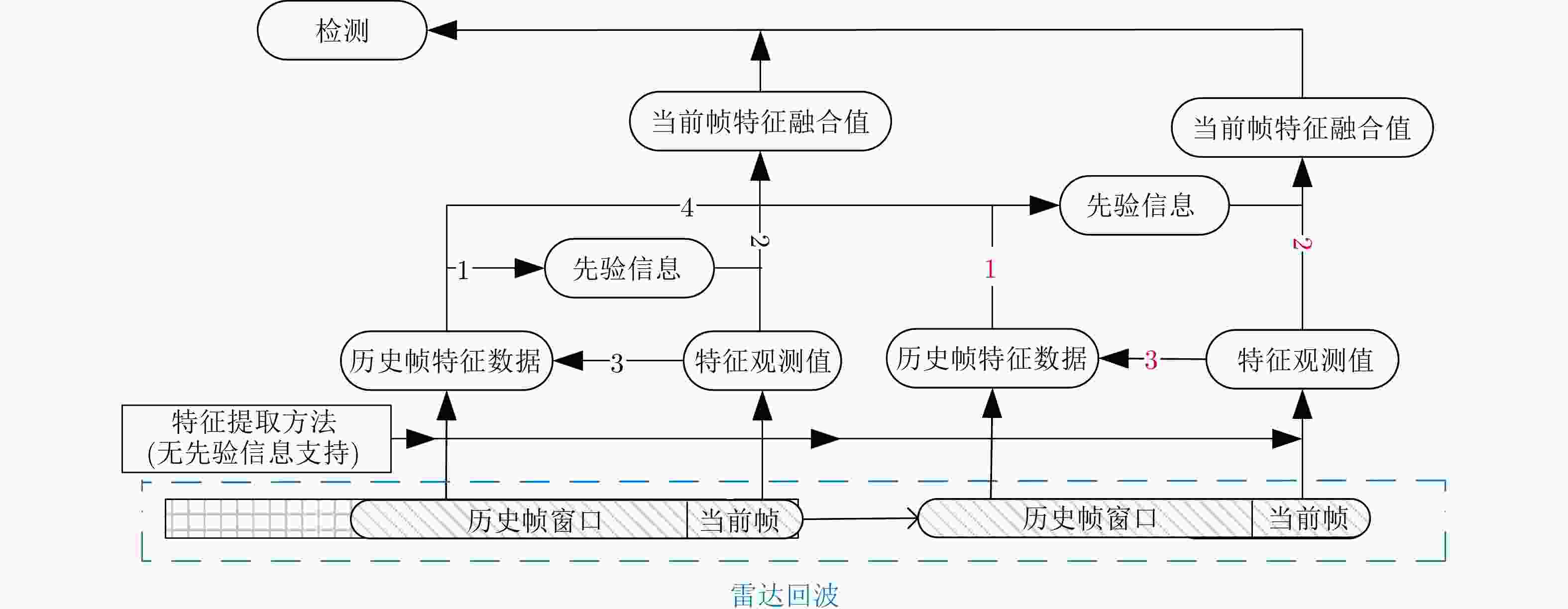
图 7 利用先验信息的特征提取方法示意图
Figure 7. The schematic diagram of the feature extraction method using prior information
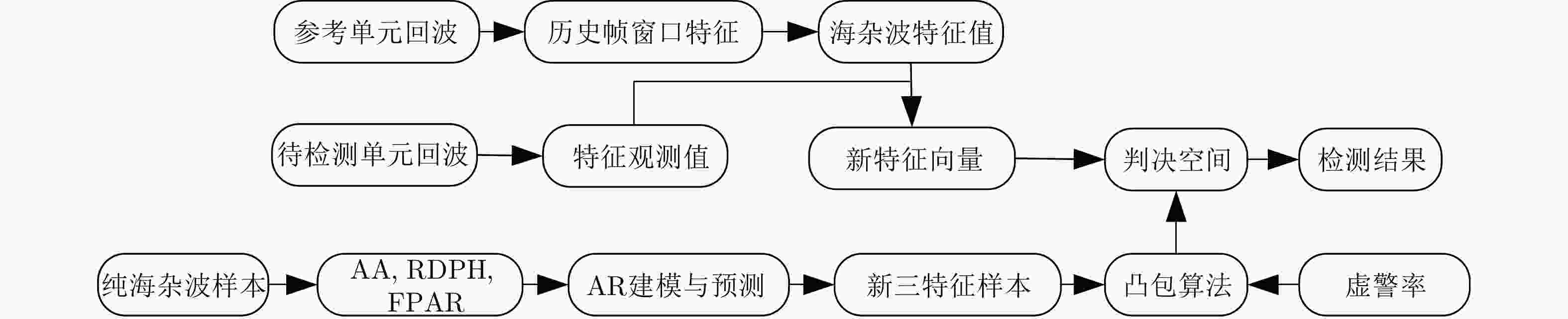
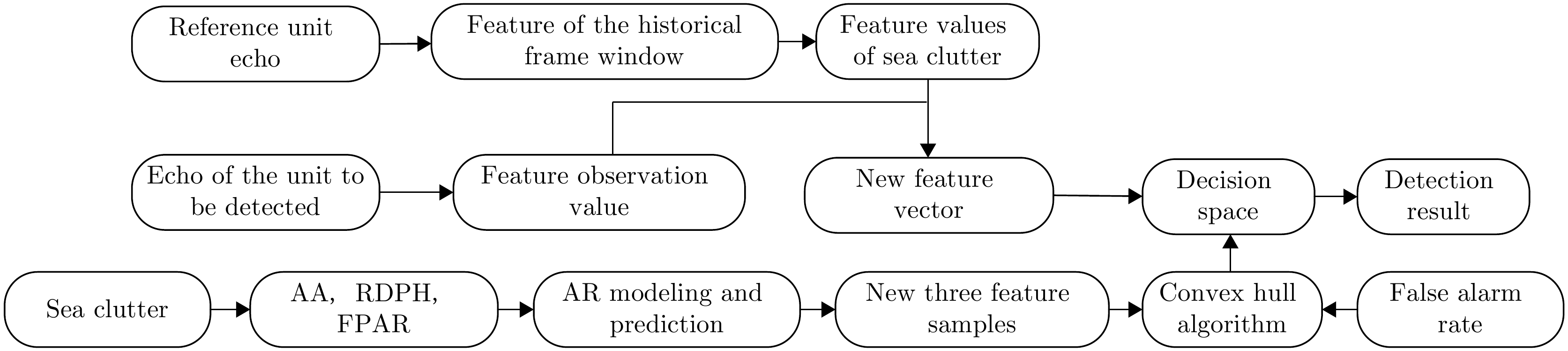
图 8 基于三特征预测的检测器工作流程图
Figure 8. The workflow diagram of the detector based on three-feature prediction
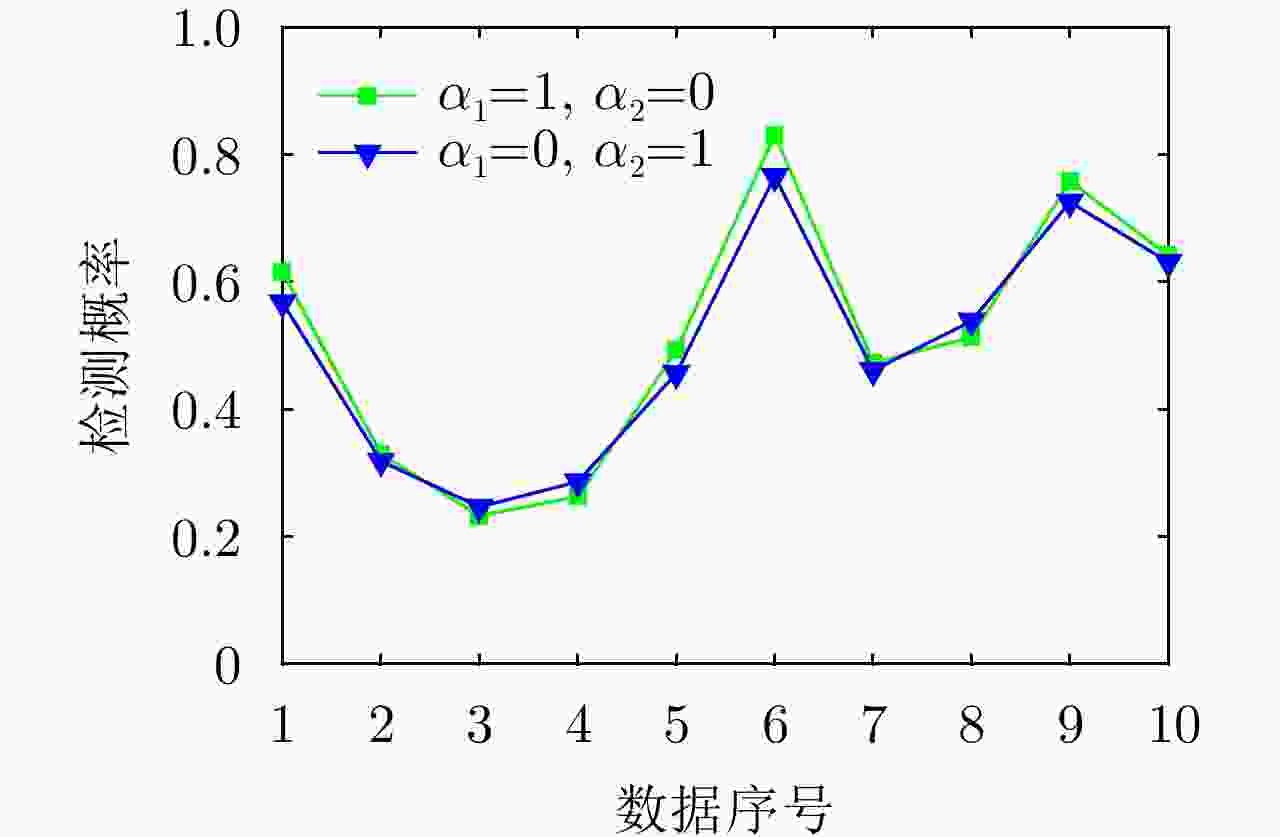
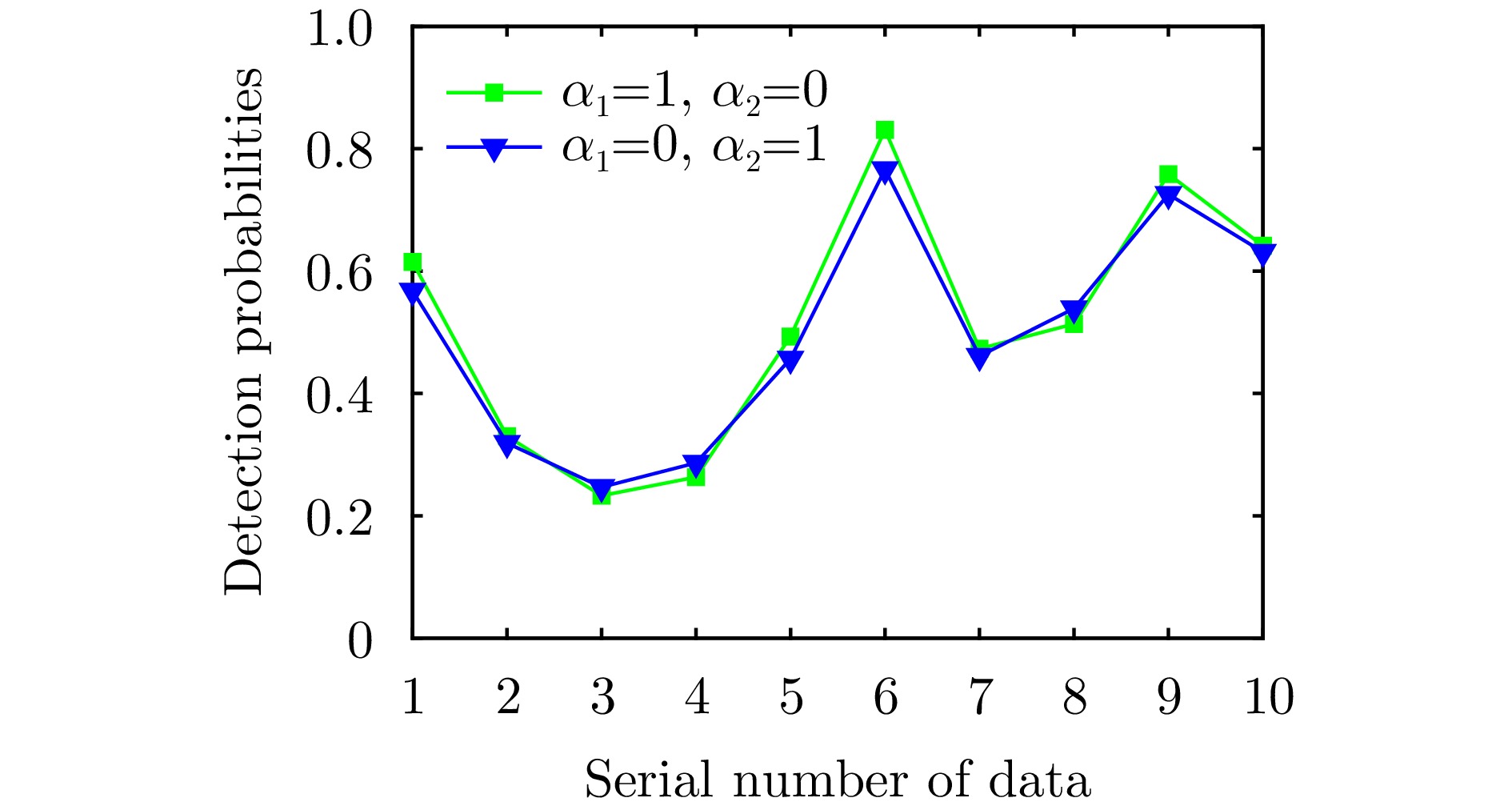
图 10 加权系数对检测概率的影响
Figure 10. The effect of weighting coefficient on detection probabilities

图 2 Average autocorrelation coefficient and average partial autocorrelation coefficient for the three features
表 1 3种特征的预测结果
Table 1. Predicted results of the three features
数据 平均幅度 相对多普勒峰高 频谱峰均比 误差均值 误差标准差 误差(%) 误差均值 误差标准差 误差(%) 误差均值 误差标准差 误差(%) #17 0.0002 0.2167 7.58 – 0.0049 0.1716 11.46 – 0.0746 2.6394 15.51 #26 – 0.0074 0.1790 10.90 – 0.0067 0.1989 13.11 – 0.2254 4.2131 16.72 #30 – 0.0087 0.1576 10.05 – 0.0069 0.2029 13.45 – 0.2353 4.0889 17.54 #31 – 0.0114 0.1769 11.42 – 0.0069 0.2002 13.21 – 0.2462 4.1325 17.43 #40 – 0.0135 0.2101 12.10 – 0.0072 0.2036 13.36 – 0.2831 4.4131 18.25 #54 – 0.0048 0.1991 11.53 – 0.0055 0.1821 12.59 – 0.1536 3.1127 15.31 #280 – 0.0114 0.1751 10.87 – 0.0059 0.1864 12.21 – 0.2316 4.2699 17.04 #310 – 0.0064 0.1280 7.71 – 0.0046 0.1722 11.26 – 0.1023 2.3707 13.11 #311 – 0.0067 0.1330 8.57 – 0.0051 0.1850 12.09 – 0.1216 2.7095 14.12 #320 – 0.0055 0.1281 8.04 – 0.0065 0.2035 13.75 – 0.1229 2.6733 14.34  下载: 导出CSV
下载: 导出CSV
表 2 1993年IPIX雷达数据说明
Table 2. The description of IPIX radar data collected in 1993
序号 数据名称 浪高(m) 风速(km/h) 目标所在单元 受影响单元 1 #17 2.2 9 9 8, 10, 11 2 #26 1.1 9 7 6, 8 3 #30 0.9 19 7 6, 8 4 #31 0.9 19 7 6, 8, 9 5 #40 1.0 9 7 5, 6, 8 6 #54 0.7 20 8 7, 9, 10 7 #280 1.6 10 8 7, 10 8 #310 0.9 33 7 6, 8, 9 9 #311 0.9 33 7 6, 8, 9 10 #320 0.9 28 7 6, 8, 9
下载: 导出CSV
表 3 重叠脉冲数对本文所提检测器的影响
Table 3. The effect of the number of overlapping pulses on the detector proposed in this paper
重叠脉冲数 #30 #31 #310 HH VV HV HH VV HV HH VV HV 0 0.270 0.381 0.417 0.316 0.519 0.541 0.573 0.255 0.604 64 0.281 0.371 0.369 0.324 0.535 0.574 0.596 0.289 0.597 128 0.345 0.457 0.485 0.412 0.578 0.637 0.602 0.310 0.649
下载: 导出CSV
表 4 历史帧窗口长度对本文所提检测器的影响
Table 4. The effect of historical frame window length on the detector proposed in this paper
历史帧窗口长度 #30 #31 #310 HH VV HV HH VV HV HH VV HV 25 0.304 0.433 0.435 0.396 0.539 0.628 0.600 0.305 0.641 50 0.317 0.446 0.462 0.400 0.561 0.635 0.602 0.312 0.647 100 0.345 0.457 0.485 0.412 0.578 0.637 0.602 0.310 0.649
下载: 导出CSV
表 5 脉冲数对4种检测器的影响
Table 5. The effect of the number of pulses on the four detectors
脉冲数 检测器 #17 #26 #320 HH VV HV HH VV HV HH VV HV 128 一致性因子检测器[26] 0.272 0.035 0.214 0.151 0.234 0.200 0.363 0.108 0.469 文献[22]检测器 0.521 0.237 0.544 0.286 0.366 0.473 0.553 0.556 0.825 原三特征检测器 0.595 0.257 0.509 0.211 0.389 0.466 0.628 0.487 0.754 所提检测器 0.642 0.304 0.544 0.281 0.403 0.528 0.745 0.674 0.855 256 一致性因子检测器[26] 0.368 0.062 0.220 0.185 0.281 0.249 0.319 0.115 0.461 文献[22]检测器 0.595 0.202 0.510 0.361 0.555 0.578 0.654 0.693 0.840 原三特征检测器 0.627 0.310 0.537 0.343 0.565 0.645 0.688 0.594 0.763 所提检测器 0.716 0.389 0.666 0.474 0.567 0.701 0.787 0.748 0.873 512 一致性因子检测器[26] 0.345 0.058 0.215 0.200 0.314 0.263 0.221 0.121 0.470 文献[22]检测器 0.621 0.201 0.521 0.441 0.581 0.590 0.758 0.764 0.855 原三特征检测器 0.633 0.353 0.620 0.425 0.613 0.686 0.657 0.625 0.845 所提检测器 0.731 0.428 0.792 0.544 0.620 0.747 0.803 0.783 0.908
下载: 导出CSV
表 1 Predicted results of the three features
Data Average amplitude Relative Doppler peak height Frequency peak-to-average ratio Average error Error standard
deviationError (%) Average error Error standard
deviationError (%) Average error Error standard
deviationError (%) #17 0.0002 0.2167 7.58 − 0.0049 0.1716 11.46 − 0.0746 2.6394 15.51 #26 − 0.0074 0.1790 10.90 − 0.0067 0.1989 13.11 − 0.2254 4.2131 16.72 #30 − 0.0087 0.1576 10.05 − 0.0069 0.2029 13.45 − 0.2353 4.0889 17.54 #31 − 0.0114 0.1769 11.42 − 0.0069 0.2002 13.21 − 0.2462 4.1325 17.43 #40 − 0.0135 0.2101 12.10 − 0.0072 0.2036 13.36 − 0.2831 4.4131 18.25 #54 − 0.0048 0.1991 11.53 − 0.0055 0.1821 12.59 − 0.1536 3.1127 15.31 #280 − 0.0114 0.1751 10.87 − 0.0059 0.1864 12.21 − 0.2316 4.2699 17.04 #310 − 0.0064 0.1280 7.71 − 0.0046 0.1722 11.26 − 0.1023 2.3707 13.11 #311 − 0.0067 0.1330 8.57 − 0.0051 0.1850 12.09 − 0.1216 2.7095 14.12 #320 − 0.0055 0.1281 8.04 − 0.0065 0.2035 13.75 − 0.1229 2.6733 14.34
下载: 导出CSV
表 2 The description of IPIX radar data collected in 1993
Number Data name Wave height (m) Wind speed (km/h) Target cell Affected cell 1 #17 2.2 9 9 8, 10, 11 2 #26 1.1 9 7 6, 8 3 #30 0.9 19 7 6, 8 4 #31 0.9 19 7 6, 8, 9 5 #40 1.0 9 7 5, 6, 8 6 #54 0.7 20 8 7, 9, 10 7 #280 1.6 10 8 7, 10 8 #310 0.9 33 7 6, 8, 9 9 #311 0.9 33 7 6, 8, 9 10 #320 0.9 28 7 6, 8, 9
下载: 导出CSV
表 3 Effect of the number of overlapping pulses on the detector proposed in this paper
Number of overlapping pulses #30 #31 #310 HH VV HV HH VV HV HH VV HV 0 0.270 0.381 0.417 0.316 0.519 0.541 0.573 0.255 0.604 64 0.281 0.371 0.369 0.324 0.535 0.574 0.596 0.289 0.597 128 0.345 0.457 0.485 0.412 0.578 0.637 0.602 0.310 0.649
下载: 导出CSV
表 4 The effect of historical frame window length on the detector proposed in this paper
Historical frame window length #30 #31 #310 HH VV HV HH VV HV HH VV HV 25 0.304 0.433 0.435 0.396 0.539 0.628 0.600 0.305 0.641 50 0.317 0.446 0.462 0.400 0.561 0.635 0.602 0.312 0.647 100 0.345 0.457 0.485 0.412 0.578 0.637 0.602 0.310 0.649
下载: 导出CSV
表 5 The effect of the number of pulses on the four detectors
Number of pulses Detector #17 #26 #320 HH VV HV HH VV HV HH VV HV 128 Consistency factor detector [ 26] 0.272 0.035 0.214 0.151 0.234 0.200 0.363 0.108 0.469 Detector in Ref. [ 22] 0.521 0.237 0.544 0.286 0.366 0.473 0.553 0.556 0.825 Original three-feature detector 0.595 0.257 0.509 0.211 0.389 0.466 0.628 0.487 0.754 Proposed detector 0.642 0.304 0.544 0.281 0.403 0.528 0.745 0.674 0.855 256 Consistency factor detector [ 26] 0.368 0.062 0.220 0.185 0.281 0.249 0.319 0.115 0.461 Detector in Ref. [ 22] 0.595 0.202 0.510 0.361 0.555 0.578 0.654 0.693 0.840 Original three-feature detector 0.627 0.310 0.537 0.343 0.565 0.645 0.688 0.594 0.763 Proposed detector 0.716 0.389 0.666 0.474 0.567 0.701 0.787 0.748 0.873 512 Consistency factor detector [ 26] 0.345 0.058 0.215 0.200 0.314 0.263 0.221 0.121 0.470 Detector in Ref. [ 22] 0.621 0.201 0.521 0.441 0.581 0.590 0.758 0.764 0.855 Original three-feature detector 0.633 0.353 0.620 0.425 0.613 0.686 0.657 0.625 0.845 Proposed detector 0.731 0.428 0.792 0.544 0.620 0.747 0.803 0.783 0.908
下载: 导出CSV
-
[1] 关键. 雷达海上目标特性综述[J]. 雷达学报, 2020, 9(4): 674–683. doi: 10.12000/JR20114.GUAN Jian. Summary of marine radar target characteristics[J]. Journal of Radars, 2020, 9(4): 674–683. doi: 10.12000/JR20114. [2] 张坤, 水鹏朗, 王光辉. 相参雷达K分布海杂波背景下非相干积累恒虚警检测方法[J]. 电子与信息学报, 2020, 42(7): 1627–1635. doi: 10.11999/JEIT190441.ZHANG Kun, SHUI Penglang, and WANG Guanghui. Non-coherent integration constant false alarm rate detectors against k-distributed sea clutter for coherent radar systems[J]. Journal of Electronics & Information Technology, 2020, 42(7): 1627–1635. doi: 10.11999/JEIT190441. [3] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084.XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084. [4] LO T, LEUNG H, LITVA J, et al. Fractal characterisation of sea-scattered signals and detection of sea-surface targets[J]. IEE Proceedings F-Radar and Signal Processing, 1993, 140(4): 243–250. doi: 10.1049/ip-f-2.1993.0034. [5] FAN Yifei, TAO Mingliang, and SU Jia. Multifractal correlation analysis of autoregressive spectrum-based feature learning for target detection within sea clutter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5108811. doi: 10.1109/TGRS.2021.3137466. [6] FAN Yifei, TAO Mingliang, SU Jia, et al. Weak target detection based on joint fractal characteristics of autoregressive spectrum in sea clutter background[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(12): 1824–1828. doi: 10.1109/LGRS.2019.2912329. [7] BI Xiaowen, GUO Shenglong, YANG Yunxiu, et al. Adaptive target extraction method in sea clutter based on fractional fourier filtering[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5115609. doi: 10.1109/TGRS.2022.3192893. [8] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260. [9] XU Shuwen, ZHENG Jibin, PU Jia, et al. Sea-surface floating small target detection based on polarization features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1505–1509. doi: 10.1109/LGRS.2018.2852560. [10] 陈世超, 高鹤婷, 罗丰. 基于极化联合特征的海面目标检测方法[J]. 雷达学报, 2020, 9(4): 664–673. doi: 10.12000/JR20072.CHEN Shichao, GAO Heting, and LUO Feng. Target detection in sea clutter based on combined characteristics of polarization[J]. Journal of Radars, 2020, 9(4): 664–673. doi: 10.12000/JR20072. [11] YAN Kun, BAI Yu, WU H C, et al. Robust target detection within sea clutter based on graphs[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(9): 7093–7103. doi: 10.1109/TGRS.2019.2911451. [12] 时艳玲, 姚婷婷, 郭亚星. 基于图连通密度的海面漂浮小目标检测[J]. 电子与信息学报, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028.SHI Yanling, YAO Tingting, and GUO Yaxing. Floating small target detection based on graph connected density in sea surface[J]. Journal of Electronics & Information Technology, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028. [13] XIE Jianda and XU Xiaojian. Phase-feature-based detection of small targets in sea clutter[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 3507405. doi: 10.1109/LGRS.2021.3093620. [14] WU Xijie, DING Hao, LIU Ningbo, et al. A method for detecting small targets in sea surface based on singular spectrum analysis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5110817. doi: 10.1109/TGRS.2021.3138488. [15] 关键, 伍僖杰, 丁昊, 等. 基于对角积分双谱的海面慢速小目标检测方法[J]. 电子与信息学报, 2022, 44(7): 2449–2460. doi: 10.11999/JEIT210408.GUAN Jian, WU Xijie, DING Hao, et al. A method for detecting small slow targets in sea surface based on diagonal integrated bispectrum[J]. Journal of Electronics & Information Technology, 2022, 44(7): 2449–2460. doi: 10.11999/JEIT210408. [16] WU Xijie, DING Hao, LIU Ningbo, et al. Priori information-based feature extraction method for small target detection in sea clutter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5115315. doi: 10.1109/TGRS.2022.3188046. [17] HAYKIN S, BAKKER R, and CURRIE B W. Uncovering nonlinear dynamics-the case study of sea clutter[J]. Proceedings of the IEEE, 2002, 90(5): 860–881. doi: 10.1109/JPROC.2002.1015011. [18] NOHARA T J and HAYKIN S. AR-based growler detection in sea clutter[J]. IEEE Transactions on Signal Processing, 1993, 41(3): 1259–1271. doi: 10.1109/78.205728. [19] 黄红梅. 应用时间序列分析[M]. 北京: 清华大学出版社, 2016: 17–57.HUANG Hongmei. Apply Time Series Analysis[M]. Beijing: Tsinghua University Press, 2016: 17–57. [20] 郑宁. 基于多源数据的高速铁路轨道几何异常状态检测方法研究[D]. [硕士论文], 北京交通大学, 2021: 22–40.ZHENG Ning. Research on high speed railway track geometric anomaly detection method based on multisource data[D]. [Master dissertation], Beijing Jiaotong University, 2021: 22–40. [21] 范剑青, 姚琦伟, 陈敏, 译. 非线性时间序列: 建模、预报及应用[M]. 北京: 高等教育出版社, 2005: 21–92.FAN Jianqing, YAO Qiwei, CHEN Min. translation. Nonlinear Time Series: Modeling, Forecasting, and Applications[M]. Beijing: Higher Education Press, 2005: 21–92. [22] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace & Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657. [23] LI Yuzhou, XIE Pengcheng, TANG Zeshen, et al. SVM-based sea-surface small target detection: A false-alarm-rate-controllable approach[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(8): 1225–1229. doi: 10.1109/LGRS.2019.2894385. [24] GUO Zixun and SHUI Penglang. Anomaly based sea-surface small target detection using K-nearest neighbor classification[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(6): 4947–4964. doi: 10.1109/TAES.2020.3011868. [25] The IPIX radar database[EB/OL]. http://soma.ece.mcmaster.ca/ipix/ , 2021.[26] SHI Yanling, XIE Xiaoyan, and LI Dongchen. Range distributed floating target detection in sea clutter via feature-based detector[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1847–1850. doi: 10.1109/LGRS.2016.2614750. -









计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

