
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Attitude and Orbital Coupled Modeling and Micro-Doppler Characteristics Analysis of the Projectile with Initial Disturbances
-
摘要: 基于动力学与运动学原理的雷达回波建模是炮弹目标微多普勒特征分析与参数提取的理论基础。该文首先对炮弹在直线弹道段受到的起始扰动进行分析,结合炮弹目标动力学方程,建立了以两圆运动模式为特征的炮弹角运动模型,阐明了炮弹目标自旋、章动和进动等角运动的含义;在此基础上,推导了炮弹角运动产生的微多普勒信号参数化表征,获得了炮弹目标角运动对目标回波在信号级的映射关系;然后,对高速自旋炮弹和低速自旋尾翼炮弹两种典型目标角运动受起始扰动影响的雷达回波信号进行仿真和时频分析,并基于炮弹目标实测数据对比验证了理论分析与模型的正确性。通过理论分析、建模仿真与实验验证,丰富和验证了炮弹目标的微多普勒效应理论,为炮弹目标运动特性辨识提供了理论和技术支撑。Abstract: Radar echo modeling based on dynamics and kinematics serves as the theoretical basis for micro-Doppler characteristic analysis and projectile parameter extractions. First, the initial disturbance of a projectile in the straight-line ballistic segment is analyzed. Based on the dynamic equation of the projectile, an angular motion model of the projectile characterized by two circular motion modes is established. Moreover, the motion definitions of projectile spin, nutation, and precession are explained. Subsequently, the parameterized characterization of the micro-Doppler signal produced by the angular motion of the projectile is derived. Furthermore, the mapping relationship between the angular motion of the projectile and the radar echo is obtained at the signal level. Taking high-speed spin projectile and a low-speed spin tail projectile as examples, when the angular motion of the two targets are affected by the initial disturbance, the radar echo signal model of the two targets is simulated and time-frequency analysis is carried out. The validity of the theoretical analysis and the model is verified by comparing the simulation results with the measured data of the projectile. Therefore, the micro-Doppler effect theory of projectile is enriched and verified through theoretical analysis, simulation modeling, and experimental verification. This study provides theoretical and technical support for the identification and analysis of projectile motion characteristics.
-
Key words:
- Micro-motion /
- Micro-Doppler /
- Initial disturbances /
- Angular motion /
- Two circular motion
-
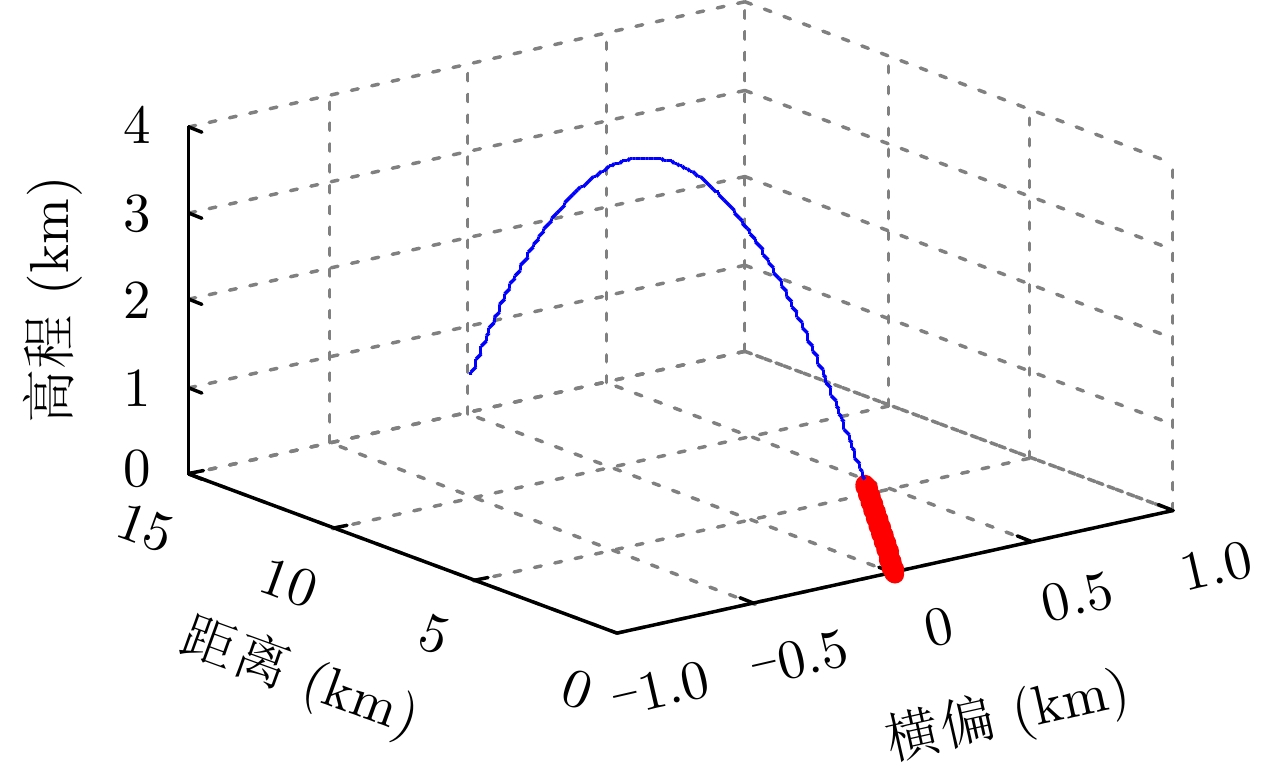
图 1 弹道轨迹与直线弹道段示意图
Figure 1. Schematic diagram of ballistic and the straight line segment
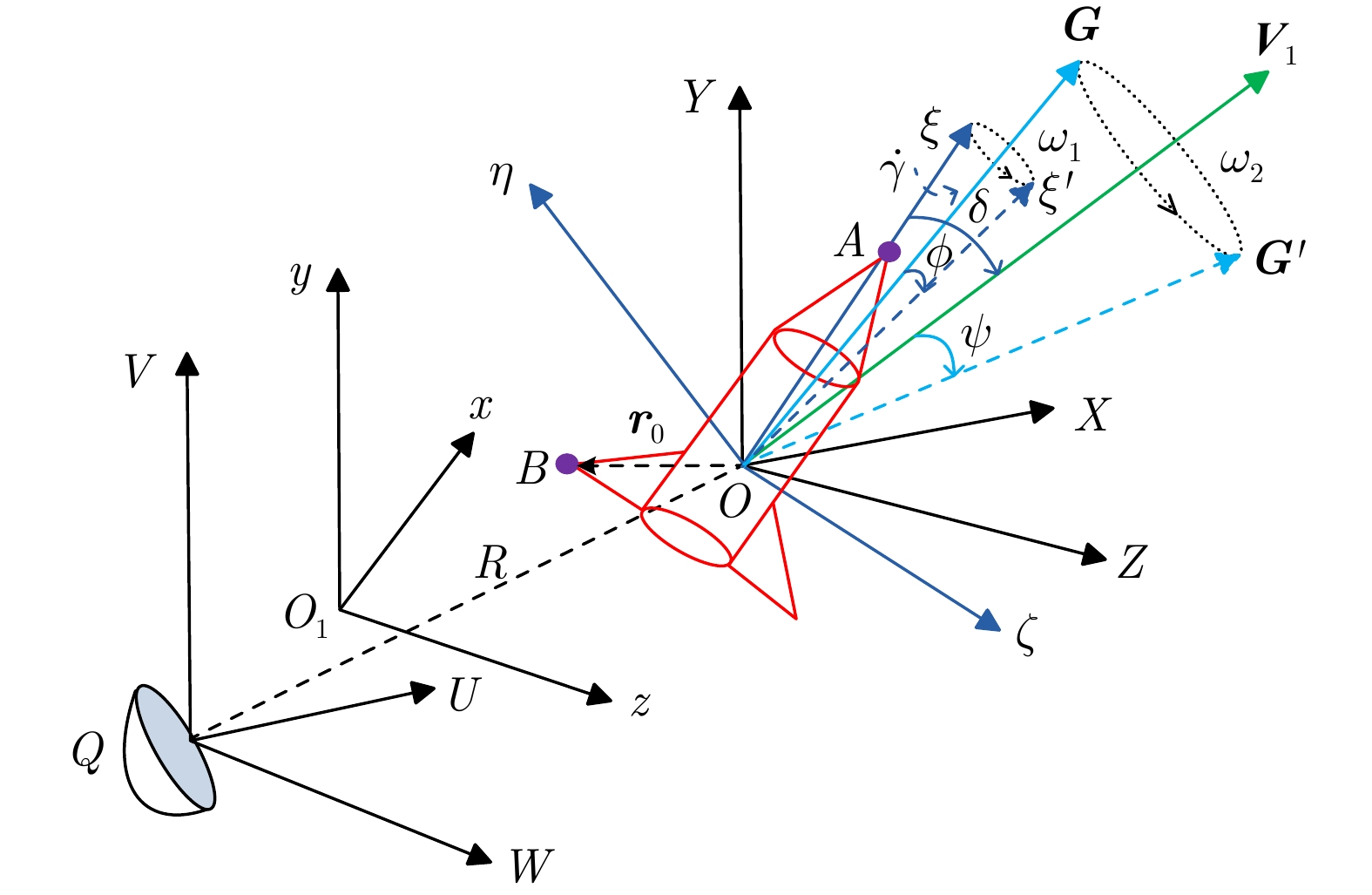
图 2 炮弹直线段角运动空间几何关系
Figure 2. Spatial geometric relation of projectile angular motion in the straight line segment
图 3 初始时刻4种坐标系空间几何关系
Figure 3. Spatial geometric relation of the four coordinate systems as the projectile is stationary
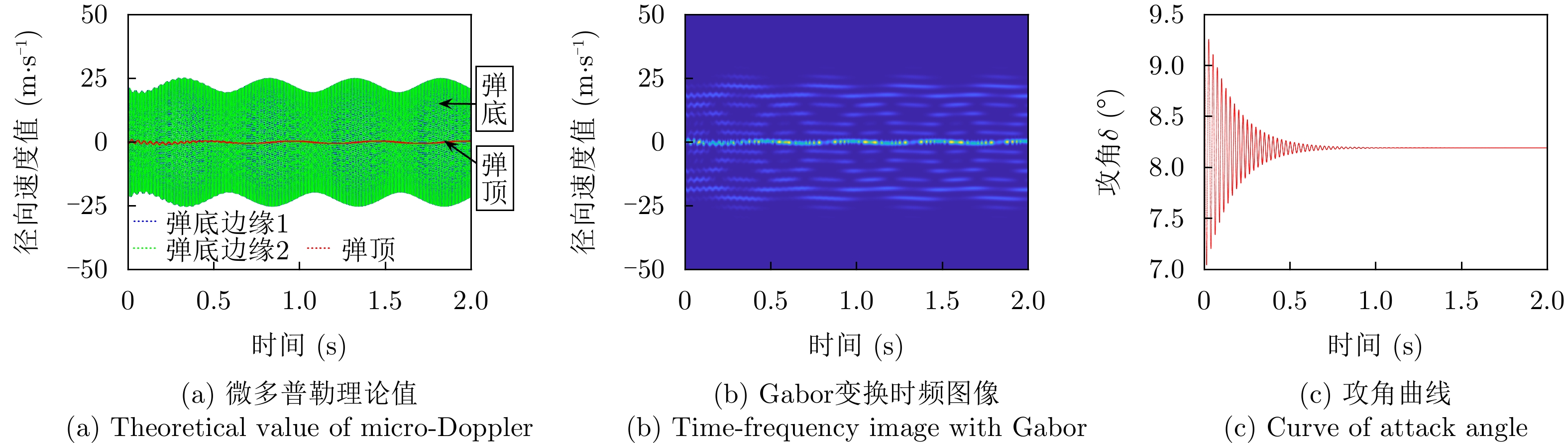
图 4 快圆和慢圆不衰减情况(高速旋转炮弹)
Figure 4. In the case of neither the fast nor the slow circular motion decays (high-speed rotating projectile)
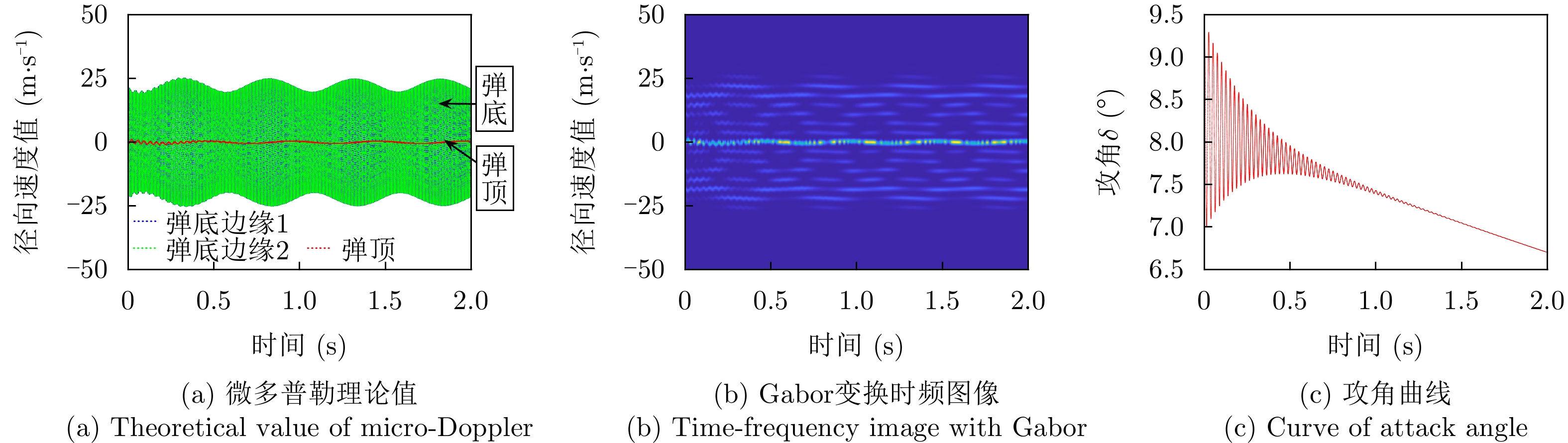
图 5 快圆衰减而慢圆不衰减情况(高速旋转炮弹)
Figure 5. In the case of the fast circular motion decays and the slow circular motion remains (high-speed rotating projectile)

图 6 快圆和慢圆均在衰减情况(高速旋转炮弹)
Figure 6. In the case of both the fast and the slow circular motion decays (high-speed rotating projectile)
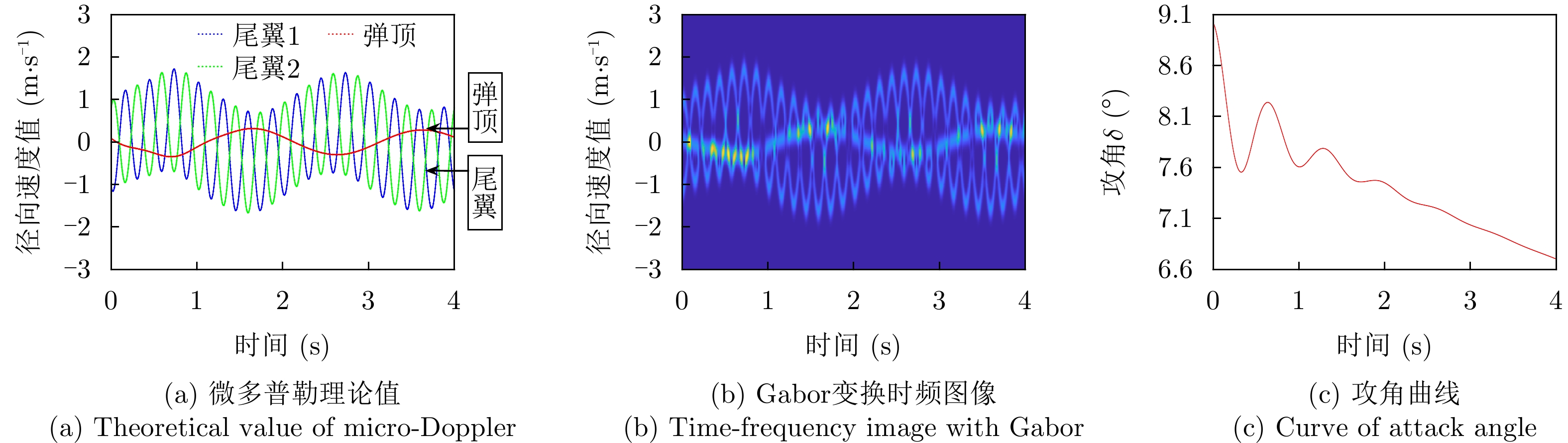
图 7 快圆和慢圆不衰减情况(旋转尾翼炮弹)
Figure 7. In the case of neither the fast nor the slow circular motion decays (rotating tail projectile)
图 8 快圆衰减而慢圆不衰减情况(旋转尾翼炮弹)
Figure 8. In the case of the fast circular motion decays and the slow circular motion remains (rotating tail projectile)

图 9 快圆和慢圆均在衰减情况(旋转尾翼炮弹)
Figure 9. In the case of both the fast and the slow circular motion decays (rotating tail projectile)

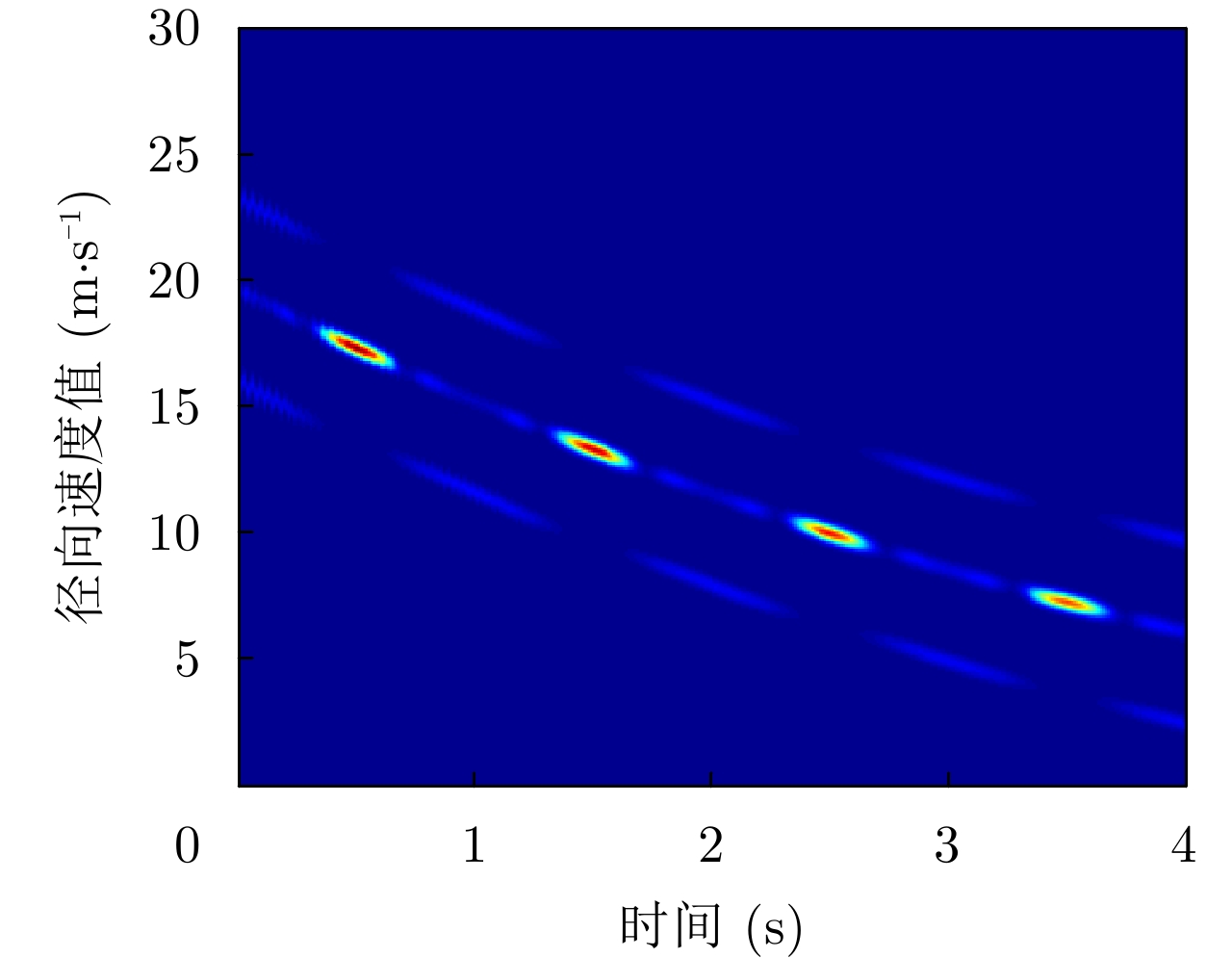
图 10 某型炮弹直线段回波时频分析仿真结果
Figure 10. Simulated time-frequency image of projectile in the straight line segment
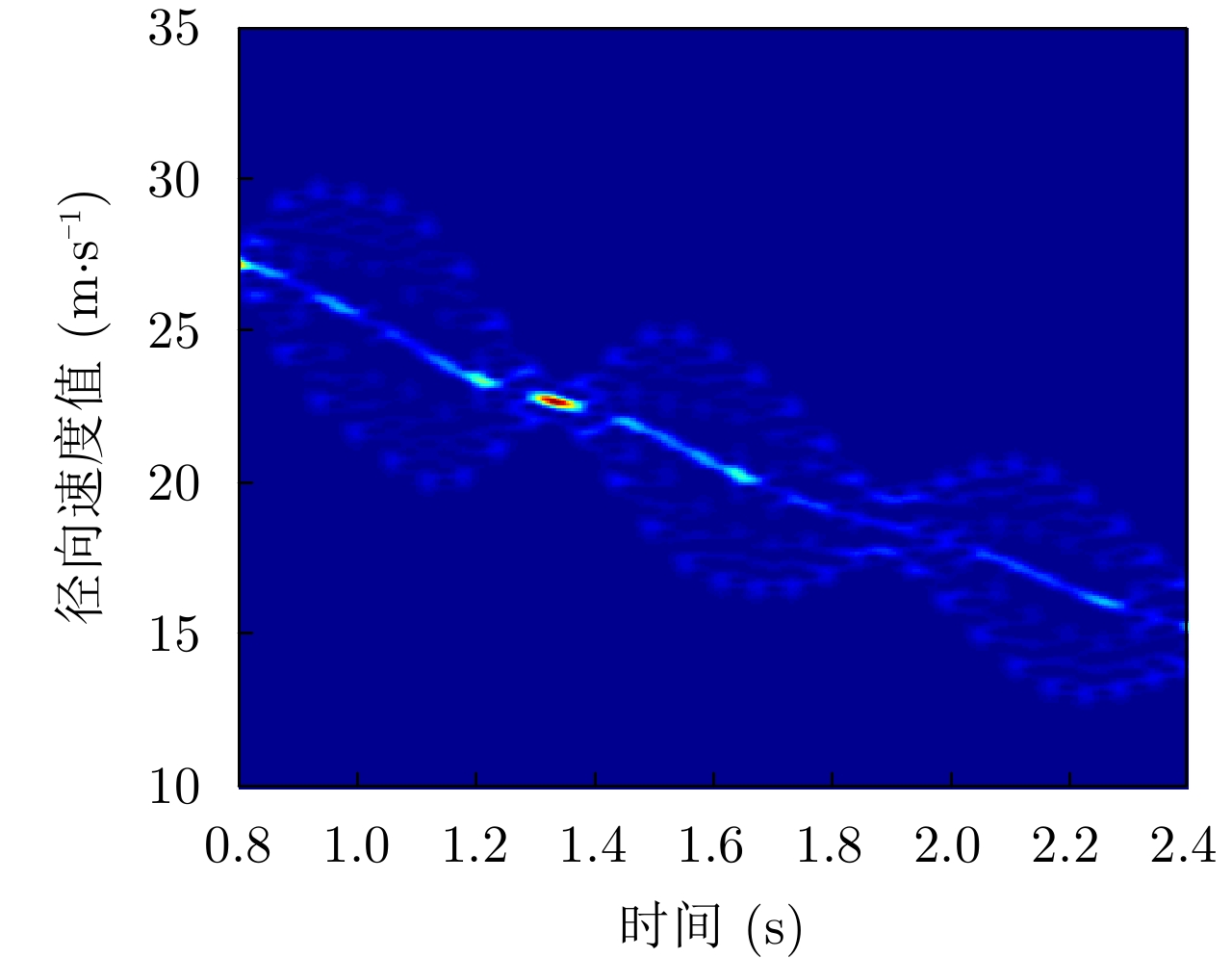
图 11 某型末制导炮弹时频分析仿真结果
Figure 11. Time-frequency image of terminal guided projectile in the straight line segment

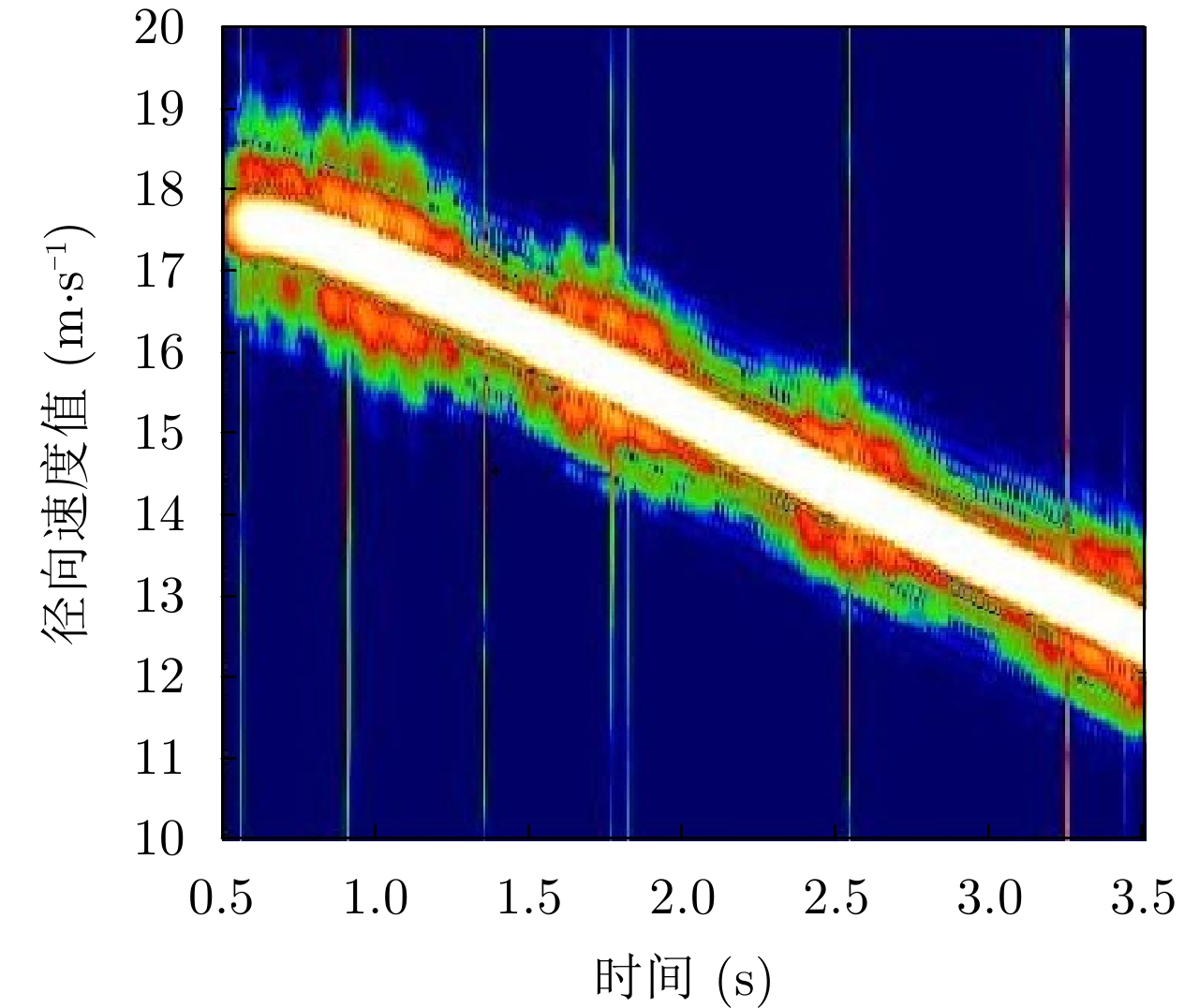
图 12 某型炮弹直线段回波真实时频图像
Figure 12. Actual time-frequency image of projectile in the straight line segment
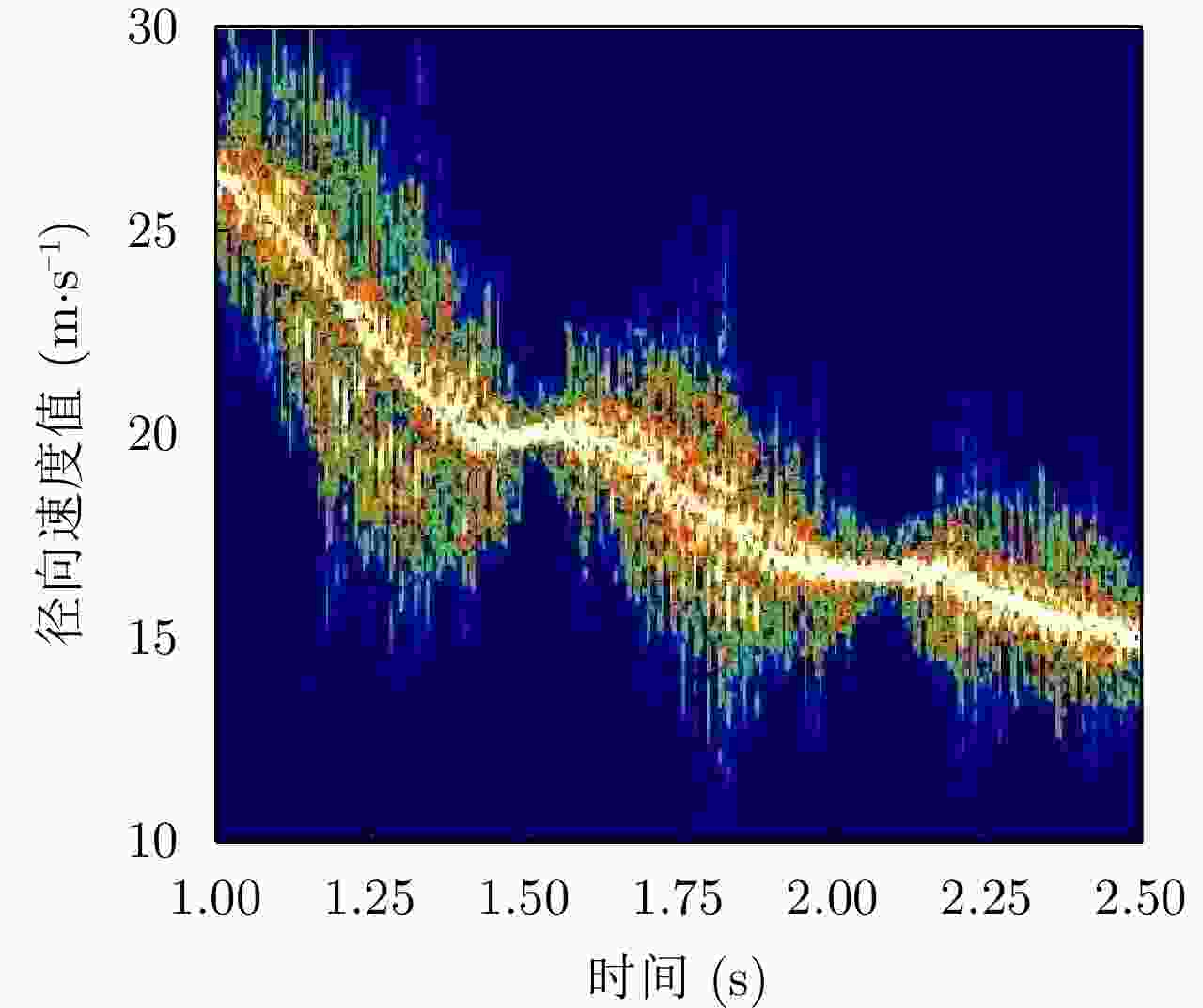
图 13 某型末制导炮弹直线段回波真实时频图像
Figure 13. Time-frequency image of terminal guided projectile in the straight line segment
表 1 仿真参数设置(高速旋转炮弹)
Table 1. Simulation parameters setting (high-speed rotating projectile)
参数 数值 点A坐标 (0.5 m, 0, 0) 点B1坐标 (–0.3 m, 0.06 m, 0) 点B2坐标 (–0.3 m, –0.06 m, 0) 自旋频率${\varOmega _{\text{s} } }$ 300π rad/s 进动频率${\varOmega _{\text{c} } }$ 4π rad/s 章动频率${\varOmega _{\text{u} } }$ 60π rad/s 章动角$\phi $ 1.2° 进动角$\psi $ 8.2° 观测时间 2.00 s 采样率 25 kHz  下载: 导出CSV
下载: 导出CSV
表 2 Hough变换提取的时频图像周期(高速旋转炮弹)
Table 2. Extracted period of time-frequency image with Hough Transform (high-speed rotating projectile)
蒙特卡罗
次数弹顶
微动周期均值(s)弹底边缘点
微动周期均值(s)5 0.484 0.482 10 0.488 0.485 20 0.492 0.490
下载: 导出CSV
表 3 仿真参数设置(旋转尾翼炮弹)
Table 3. Simulation parameters setting (rotating tail projectile )
参数 数值 点A坐标 (1.2 m, 0, 0) 点B1坐标 (–1.8 m, 0.12 m, 0) 点B2坐标 (–1.8 m, –0.12 m, 0) 自旋频率${\varOmega _{\text{s} } }$ 10π rad/s 进动频率${\varOmega _{\text{c} } }$ π rad/s 章动频率${\varOmega _{\text{u} } }$ 4π rad/s 章动角$\phi $ 0.8° 进动角$\psi $ 8.2° 观测时间 4.00 s 采样率 5 kHz
下载: 导出CSV
表 4 Hough变换提取的时频图像周期(旋转尾翼炮弹)
Table 4. Extracted period of time-frequency image with Hough Transform (rotating tail projectile)
蒙特卡罗
次数弹顶
微动周期均值(s)尾翼
微动周期均值(s)5 1.993 1.990 10 1.995 1.991 20 1.996 1.992
下载: 导出CSV
-
[1] 高旭东. 弹箭飞行原理与应用[M]. 北京: 北京理工大学出版社, 2018: 13–104.GAO Xudong. Principle and Application of Projectile Flight[M]. Beijing: Beijing Institute of Technology Press, 2018: 13–104. [2] 韩子鹏. 弹箭外弹道学[M]. 北京: 北京理工大学出版社, 2014: 163–218.HAN Zipeng. Exterior Ballistics of Projectiles and Rockets[M]. Beijing: Beijing Institute of Technology Press, 2014: 163–218. [3] 徐明友. 高等外弹道学[M]. 北京: 高等教育出版社, 2003: 21–93.XU Mingyou. Advanced Exterior Ballistics[M]. Beijing: Higher Education Press, 2003: 21–93. [4] 刘怡昕, 刘玉文. 外弹道学[M]. 北京: 海潮出版社, 1998: 7–98.LIU Yixin and LIU Yuwen. Exterior Ballistics[M]. Beijing: Haichao Press, 1998: 7–98. [5] CHEN V C. Analysis of radar micro-Doppler with time-frequency transforms[C]. The 10th IEEE Workshop on Statistical Signal and Array Processing, Pocono Manor, USA, 2000: 463–466. [6] 黄培康, 殷红成, 许小剑. 雷达目标特性[M]. 北京: 电子工业出版社, 2005: 173–281.HUANG Peikang, YIN Hongcheng, and XU Xiaojian. Characterisics of Radar Targets[M]. Beijing: Publishing House of Electronics Industry, 2005: 173–281. [7] CHEN Xiaolong, YU Xiaohan, HUANG Yong, et al. Adaptive clutter suppression and detection algorithm for radar maneuvering target with high-order motions via sparse fractional ambiguity function[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 1515–1526. doi: 10.1109/JSTARS.2020.2981046 [8] 黎湘, 刘永祥, 李康乐. 雷达目标微动特性[M]. 北京: 科学出版社, 2016: 1–19.LI Xiang, LIU Yongxiang, and LI Kangle. Characterisics of Radar Targets with Micro-Motion[M]. Beijing: Science Press, 2016: 1–19. [9] 冯存前, 贺思三, 童宁宁, 等. 弹道目标微多普勒效应分析与特征提取技术[M]. 北京: 国防工业出版社, 2018: 1–9.FENG Cunqian, HE Sisan, TONG Ningning, et al. Micro-Doppler Effect Analysis and Micro-Motion Feature Extraction Technology of Ballistic Targets[M]. Beijing: National Defense Industry Press, 2018: 1–9. [10] 王童, 童创明, 李西敏, 等. 扩展性微动目标回波模拟与特征参数提取研究[J]. 物理学报, 2015, 64(21): 210301. doi: 10.7498/aps.64.210301WANG Tong, TONG Chuangming, LI Ximin, et al. Research on extended micro-motion target echo simulation and characteristic extraction[J]. Acta Physica Sinica, 2015, 64(21): 210301. doi: 10.7498/aps.64.210301 [11] BAI Xueru, ZHOU Feng, and HUI Ye. Obtaining JTF-signature of space-debris from incomplete and phase-corrupted data[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1169–1180. doi: 10.1109/TAES.2017.2667899 [12] 张群, 屈筱钰, 李开明, 等. MMV模型下无源双基雷达低空目标微动特征提取[J]. 华中科技大学学报:自然科学版, 2020, 48(3): 69–74. doi: 10.13245/j.hust.200313ZHANG Qun, QU Xiaoyu, LI Kaiming, et al. Micro-Doppler feature extraction of low-altitude targets based on MMV model under passive bistasic radar[J]. Journal of Huazhong University of Science and Technology:Natural Science Edition, 2020, 48(3): 69–74. doi: 10.13245/j.hust.200313 [13] 李建周, 刘祥威, 范超群, 等. 多自由度飞行目标动态建模及其散射特性分析[J]. 系统工程与电子技术, 2019, 41(11): 2401–2407. doi: 10.3969/j.issn.1001-506X.2019.11.01LI Jianzhou, LIU Xiangwei, FAN Chaoqun, et al. Geometric modeling and scattering characteristics analysis of multi-degree-of-freedom flying targets[J]. Systems Engineering and Electronics, 2019, 41(11): 2401–2407. doi: 10.3969/j.issn.1001-506X.2019.11.01 [14] 胡卫东, 杜小勇, 张乐锋, 等. 雷达目标识别理论[M]. 北京: 国防工业出版社, 2017: 43–72.HU Weidong, DU Xiaoyong, ZHANG Lefeng, et al. Theory of Radar Recognition[M]. Beijing: National Defense Industry Press, 2017: 43–72. [15] 冯存前, 李靖卿, 贺思三, 等. 组网雷达中弹道目标微动特征提取与识别综述[J]. 雷达学报, 2015, 4(6): 609–620. doi: 10.12000/JR15084FENG Cunqian, LI Jingqing, HE Sisan, et al. Micro-Doppler feature extraction and recognition based on netted radar for ballistic targets[J]. Journal of Radars, 2015, 4(6): 609–620. doi: 10.12000/JR15084 [16] 丁树奎, 王良明, 杨志伟, 等. 远程火炮弹丸起始扰动的动力学特性[J]. 兵工学报, 2021, 42(4): 673–683. doi: 10.3969/j.issn.1000-1093.2021.04.001DING Shukui, WANG Liangming, YANG Zhiwei, et al. Dynamic property of the initial disturbance of projectile for the long-range artillery howitzer[J]. Acta Armamentarii, 2021, 42(4): 673–683. doi: 10.3969/j.issn.1000-1093.2021.04.001 [17] 张平, 赵志明, 贾波, 等. 尾翼稳定火箭弹高原姿态运动规律研究[J]. 兵工学报, 2016, 37(8): 1345–1350. doi: 10.3969/j.issn.1000-1093.2016.08.001ZHANG Ping, ZHAO Zhiming, JIA Bo, et al. Research on attitude motion law of rockets on plateau[J]. Acta Armamentarii, 2016, 37(8): 1345–1350. doi: 10.3969/j.issn.1000-1093.2016.08.001 [18] 李瑞, 李开明, 张群, 等. 基于角多普勒效应的自旋目标微动特征提取[J]. 电子与信息学报, 2021, 43(3): 547–554. doi: 10.11999/JEIT200595LI Rui, LI Kaiming, ZHANG Qun, et al. Micro-motion feature extraction of spinning target based on angular Doppler effect[J]. Journal of Electronics &Information Technology, 2021, 43(3): 547–554. doi: 10.11999/JEIT200595 [19] 张群, 胡健, 罗迎, 等. 微动目标雷达特征提取、成像与识别研究进展[J]. 雷达学报, 2018, 7(5): 531–547. doi: 10.12000/JR18049ZHANG Qun, HU Jian, LUO Ying, et al. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions[J]. Journal of Radars, 2018, 7(5): 531–547. doi: 10.12000/JR18049 [20] 孙照强, 李宝柱, 鲁耀兵. 弹道目标章动特性及其微多普勒研究[J]. 现代雷达, 2009, 31(4): 24–27. doi: 10.16592/j.cnki.1004-7859.2009.04.002SUN Zhaoqiang, LI Baozhu, and LU Yaobing. A study on nutation property of ballistic target and its micro-Doppler[J]. Modern Radar, 2009, 31(4): 24–27. doi: 10.16592/j.cnki.1004-7859.2009.04.002 -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

