
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Research on Full-aspect Three-dimensional SAR Imaging Method for Complex Structural Facilities without Prior Model
-
摘要: 复杂结构设施的SAR三维成像是SAR成像领域的热点和难点问题。现有SAR三维成像依赖于高程方向的多通道或多次飞行,对雷达系统或数据获取的要求较高。该文提出无先验模型复杂结构设施三维成像方法,仅需一次飞行即可获得先验信息未知区域全场景全方位三维图像。该方法充分利用圆迹SAR的全方位观测、解叠掩和解高程模糊优势,无需目标预先建模和三维成像网格构建,适用于大面积区域复杂结构设施的精细三维成像,在雷达三维成像实用化技术方面取得了重要进展。通过该方法首次获得FAST射电望远镜的雷达全方位三维图像,验证了理论与方法的正确性与有效性。Abstract: SAR three-Dimensional (3D) imaging of complex structural facilities is an important and challenging issue in SAR imaging. The existing 3D SAR imaging relies on multiple channels or flights in the elevation direction, exerting high demands on the radar system or data acquisition. This paper proposes a 3D imaging method for complex structural facilities without a prior model, and the full-aspect 3D image of the entire scene in the region with unknown prior information can be obtained solely using a single flight. This method completely utilizes the full-aspect observation as well as the layover and elevation ambiguity resolving capabilities of circular SAR without requiring target pre-modeling and 3D imaging grid construction. Moreover, the method is suitable for fine 3D imaging complex structural facilities in large areas. Significant progress has been made in the practical technology of radar 3D imaging. The full-aspect 3D radar images of the FAST radio telescope are obtained for the first time with the proposed method, thus verifying the correctness and effectiveness of our theory and method.
-
Key words:
- 3D SAR imaging /
- Multi-aspect SAR /
- Full-aspect SAR /
- Circular SAR /
- InSAR
-
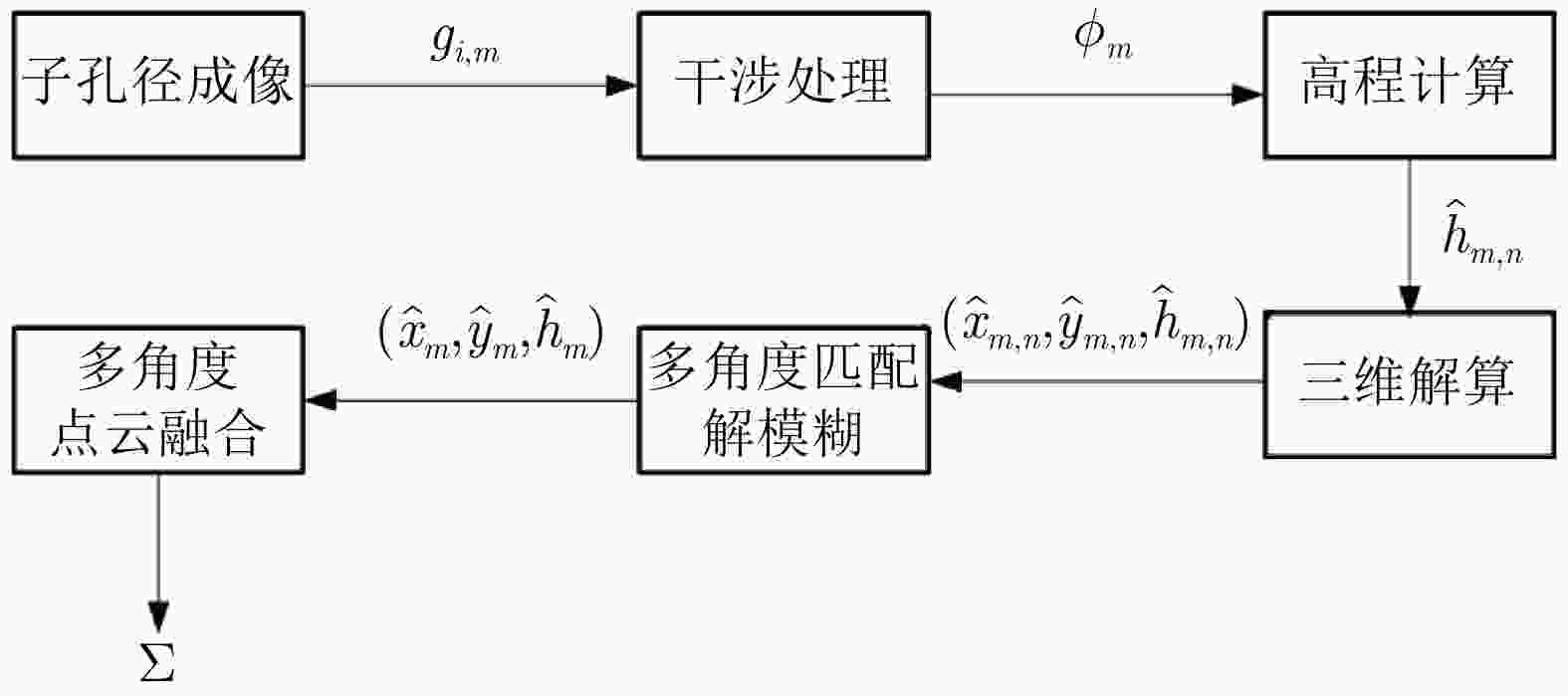
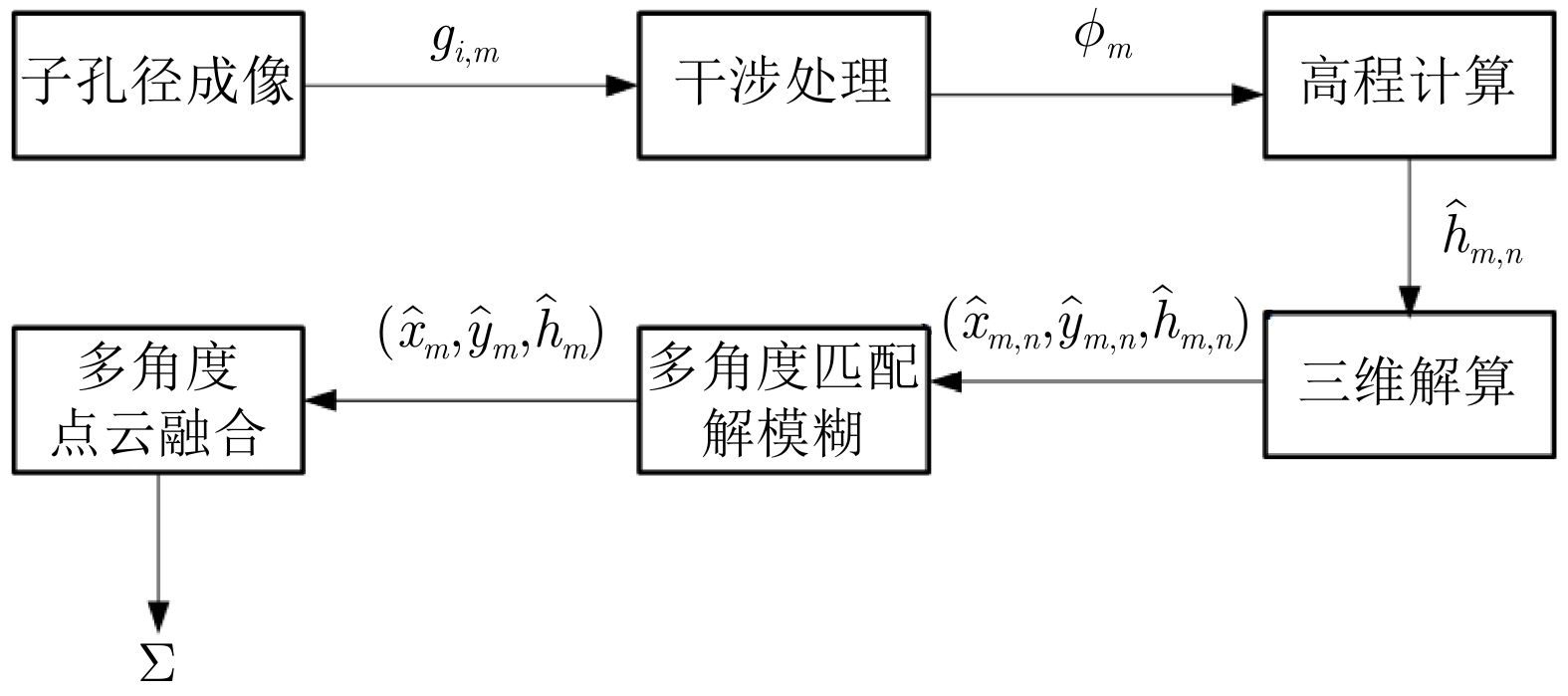
图 3 无先验模型SAR全方位三维成像方法流程图
Figure 3. Flow chart of full-aspect 3D SAR imaging method without prior model
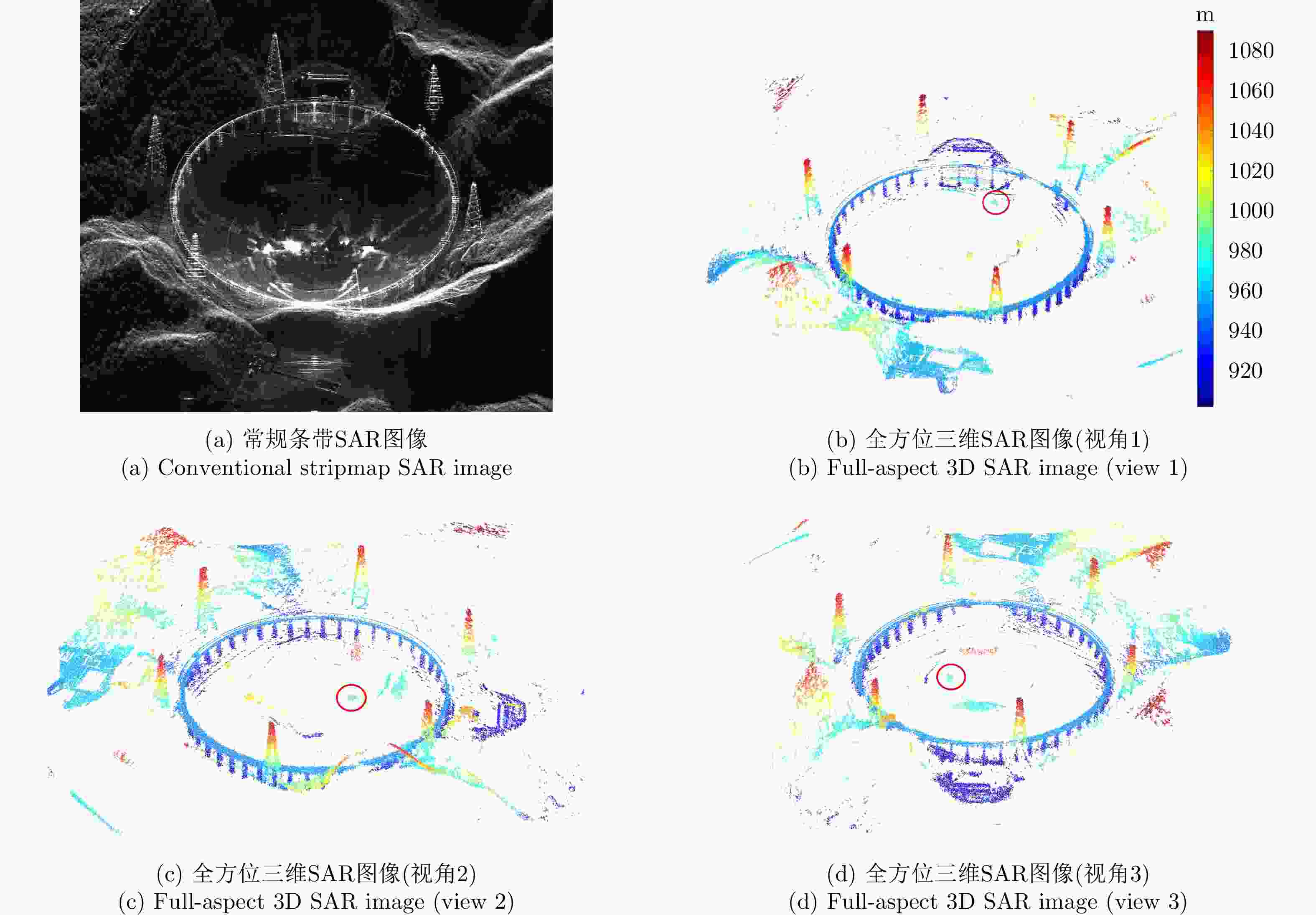
图 10 常规条带SAR图像与全方位三维SAR图像对比
Figure 10. Comparison between conventional stripmap SAR image and full-aspect 3D SAR image
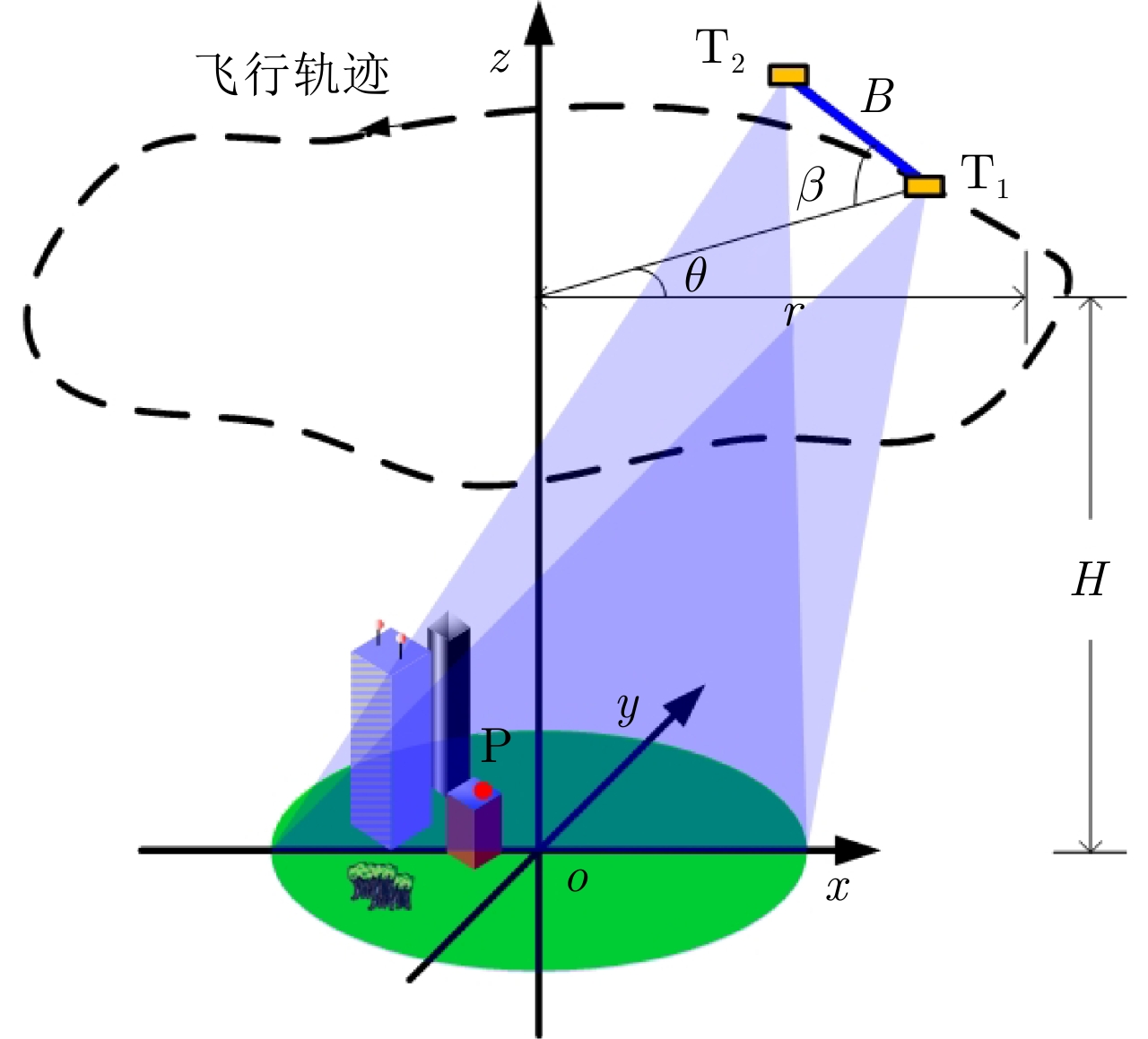
表 1 Ka波段机载干涉圆迹SAR实验参数
Table 1. Parameters of Ka-band airborne InCSAR experiment
参数 数值 参数 数值 中心频率 35 GHz 带宽 900 MHz 基线长度 0.156 m 基线倾角 45° 飞行高度 4000 m 飞行半径 3000 m 场景海拔 940 m  下载: 导出CSV
下载: 导出CSV
-
[1] 洪文. 圆迹SAR成像技术研究进展[J]. 雷达学报, 2012, 1(2): 124–135. doi: 10.3724/SP.J.1300.2012.20046HONG Wen. Progress in circular SAR imaging technique[J]. Journal of Radars, 2012, 1(2): 124–135. doi: 10.3724/SP.J.1300.2012.20046 [2] LIN Yun, HONG Wen, TAN Weixian, et al. Airborne circular SAR imaging: Results at P-band[C]. 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 5594–5597. [3] 安道祥, 陈乐平, 冯东, 等. 机载圆周SAR成像技术研究[J]. 雷达学报, 2020, 9(2): 221–242. doi: 10.12000/JR20026AN Daoxiang, CHEN Leping, FENG Dong, et al. Study of the airborne circular synthetic aperture radar imaging technology[J]. Journal of Radars, 2020, 9(2): 221–242. doi: 10.12000/JR20026 [4] 朱岱寅, 张营, 俞翔, 等. 微型合成孔径雷达成像信号处理技术[J]. 雷达学报, 2019, 8(6): 793–803. doi: 10.12000/JR19094ZHU Daiyin, ZHANG Ying, YU Xiang, et al. Imaging signal processing technology for miniature synthetic aperture radar[J]. Journal of Radars, 2019, 8(6): 793–803. doi: 10.12000/JR19094 [5] 洪文, 王彦平, 林赟, 等. 新体制SAR三维成像技术研究进展[J]. 雷达学报, 2018, 7(6): 633–654. doi: 10.12000/JR18109HONG Wen, WANG Yanping, LIN Yun, et al. Research progress on three-dimensional SAR imaging techniques[J]. Journal of Radars, 2018, 7(6): 633–654. doi: 10.12000/JR18109 [6] LIN Yun, HONG Wen, LI Yang, et al. Study on fine feature description of multi-aspect SAR observations[C]. 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 2016: 5682–5685. [7] 毕辉, 金双, 王潇, 等. 基于高分三号SAR数据的城市建筑高分辨率高维成像[J]. 雷达学报, 2022, 11(1): 40–51. doi: 10.12000/JR21113BI Hui, JIN Shuang, WANG Xiao, et al. High-resolution high-dimensional imaging of urban building based on GaoFen-3 SAR data[J]. Journal of Radars, 2022, 11(1): 40–51. doi: 10.12000/JR21113 [8] 赵曜, 许俊聪, 全相印, 等. 基于稀疏和低秩结构的层析SAR成像方法[J]. 雷达学报, 2022, 11(1): 52–61. doi: 10.12000/JR21210ZHAO Yao, XU Juncong, QUAN Xiangyin, et al. Tomographic SAR imaging method based on sparse and low-rank structures[J]. Journal of Radars, 2022, 11(1): 52–61. doi: 10.12000/JR21210 [9] ERTIN E, AUSTIN C D, SHARMA S, et al. GOTCHA experience report: Three-dimensional SAR imaging with complete circular apertures[C]. SPIE 6568, Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, United States, 2007: 9–20. [10] BAO Qian, LIN Yun, HONG Wen, et al. Holographic SAR tomography image reconstruction by combination of adaptive imaging and sparse Bayesian inference[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(8): 1248–1252. doi: 10.1109/LGRS.2017.2704601 [11] DONG Feng, AN Daoxiang, CHEN Leping, et al. Holographic SAR tomography 3-D reconstruction based on iterative adaptive approach and generalized likelihood ratio test[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(1): 305–315. doi: 10.1109/TGRS.2020.2994201 [12] AUSTIN C D, ERTIN E, and MOSES R L. Sparse signal methods for 3-D radar imaging[J]. IEEE Journal of Selected Topics in Signal Processing, 2011, 5(3): 408–423. doi: 10.1109/JSTSP.2010.2090128 [13] ERTIN E, MOSES R L, and POTTER L C. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR[J]. IET Radar, Sonar & Navigation, 2010, 4(3): 464–473. doi: 10.1049/iet-rsn.2009.0048 [14] PONCE O, PRATS-IRAOLA P, SCHEIBER R, et al. First airborne demonstration of holographic SAR tomography with fully polarimetric multicircular acquisitions at L-band[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(10): 6170–6196. doi: 10.1109/TGRS.2016.2582959 [15] PONCE O, PRATS P, SCHEIBER R, et al. Polarimetric 3-D imaging with airborne holographic SAR tomography over glaciers[C]. 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 2015: 5280–5283. [16] PONCE O, JOERG H, SCHEIBER R, et al. First study on holographic SAR tomography over agricultural crops at C-/X-band[C]. 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 2016: 7403–7406. [17] 仇晓兰, 焦泽坤, 杨振礼, 等. 微波视觉三维SAR关键技术及实验系统初步进展[J]. 雷达学报, 2022, 11(1): 1–19. doi: 10.12000/JR22027QIU Xiaolan, JIAO Zekun, YANG Zhenli, et al. Key technology and preliminary progress of microwave vision 3D SAR experimental system[J]. Journal of Radars, 2022, 11(1): 1–19. doi: 10.12000/JR22027 [18] 刘燕, 谭维贤, 林赟, 等. 基于圆迹SAR的建筑物轮廓信息提取[J]. 电子与信息学报, 2015, 37(4): 946–952. doi: 10.11999/JEIT140717LIU Yan, TAN Weixian, LIN Yun, et al. An approach of the outlines extraction of building footprints from the circular SAR data[J]. Journal of Electronics &Information Technology, 2015, 37(4): 946–952. doi: 10.11999/JEIT140717 [19] YU Lingjuan, LIN Yun, LI Yang, et al. Height profile estimation of power lines based on two-dimensional CSAR imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(3): 339–343. doi: 10.1109/LGRS.2015.2512285 [20] ZHANG Ying, ZHU Daiyin, and KONG Yingying. 3-D structure-from-motion retrieval based on circular videosar sequences[C]. 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019: 134–137. [21] CHEN Leping, AN Daoxiang, HUANG Xiaotao, et al. A 3D reconstruction strategy of vehicle outline based on single-pass single-polarization CSAR data[J]. IEEE Transactions on Image Processing, 2017, 26(11): 5545–5554. doi: 10.1109/TIP.2017.2738566 [22] ZHOU Chaowei, ZHOU Yejian, SUO Zhiyong, et al. Voxel area sculpturing-based 3D scene reconstruction from single-pass CSAR data[J]. Electronics Letters, 2020, 56(11): 566–567. doi: 10.1049/el.2020.0263 [23] ZHAO Yue, LIN Yun, HONG Wen, et al. Adaptive imaging of anisotropic target based on circular-SAR[J]. Electronics Letters, 2016, 52(16): 1406–1408. doi: 10.1049/el.2016.1764 [24] 赵月, 林赟, 王彦平, 等. 基于圆迹SAR的目标方位散射特征提取研究[J]. 信号处理, 2017, 33(4): 613–617. doi: 10.16798/j.issn.1003-0530.2017.04.024ZHAO Yue, LIN Yun, WANG Yanping, et al. Target feature extraction on azimuth angles based on circular SAR[J]. Journal of Signal Processing, 2017, 33(4): 613–617. doi: 10.16798/j.issn.1003-0530.2017.04.024 [25] TENG Fei, HONG Wen, and LIN Yun. Aspect entropy extraction using circular SAR data and scattering anisotropy analysis[J]. Sensors, 2019, 19(2): 346. doi: 10.3390/s19020346 [26] TENG Fei, LIN Yun, WANG Yanping, et al. An anisotropic scattering analysis method based on the statistical properties of multi-angular SAR images[J]. Remote Sensing, 2020, 12(13): 2152. doi: 10.3390/rs12132152 [27] LI Yang, YIN Qiang, LIN Yun, et al. Anisotropy scattering detection from multiaspect signatures of circular polarimetric SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1575–1579. doi: 10.1109/LGRS.2018.2850859 [28] XUE Feiteng, LIN Yun, HONG Wen, et al. An improved H/α unsupervised classification method for circular PolSAR images[J]. IEEE Access, 2018, 6: 34296–34306. doi: 10.1109/ACCESS.2018.2838329 [29] XU Feng, LI Yongchen, and JIN Yaqiu. Polarimetric-anisotropic decomposition and anisotropic entropies of high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(9): 5467–5482. doi: 10.1109/TGRS.2016.2565693 [30] 杨彦辉, 林赟, 洪文. 利用星载SAR单轨多角度地距图像提取高程信息[J]. 测绘科学, 2019, 44(7): 96–104. doi: 10.16251/j.cnki.1009-2307.2019.07.015YANG Yanhui, LIN Yun, and HONG Wen. Elevation extraction from multi-angle and ground-range images in single orbit based on spaceborne SAR[J]. Science of Surveying and Mapping, 2019, 44(7): 96–104. doi: 10.16251/j.cnki.1009-2307.2019.07.015 [31] FENG Shanshan, LIN Yun, WANG Yanping, et al. DEM generation with a scale factor using multi-aspect SAR imagery applying radargrammetry[J]. Remote Sensing, 2020, 12(3): 556. doi: 10.3390/rs12030556 [32] ZHANG Hanqing, LIN Yun, FENG Shanshan, et al. 3-D target reconstruction using C-band circular SAR imagery based on background constraints[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 2923–2926. [33] FENG Shanshan, LIN Yun, WANG Yanping, et al. 3D point cloud reconstruction using inversely mapping and voting from single pass CSAR images[J]. Remote Sensing, 2021, 13(17): 3534. doi: 10.3390/rs13173534 [34] LIN Yun, HONG Wen, TAN Weixian, et al. Interferometric circular SAR method for three-dimensional imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(6): 1026–1030. doi: 10.1109/LGRS.2011.2150732 [35] LIN Yun, BAO Qian, HOU Liying, et al. Full-aspect 3D target reconstruction of interferometric circular SAR[C]. SPIE 10004, Image and Signal Processing for Remote Sensing XXII, Edinburgh, UK, 2016: 424–432. [36] 侯丽英, 林赟, 洪文. 干涉圆迹SAR的目标三维重建方法研究[J]. 雷达学报, 2016, 5(5): 538–547. doi: 10.12000/JR16009HOU Liying, LIN Yun, and HONG Wen. Three-dimensional reconstruction method study based on interferometric circular SAR[J]. Journal of Radars, 2016, 5(5): 538–547. doi: 10.12000/JR16009 [37] 刘燕, 林赟, 谭维贤, 等. 基于圆迹干涉SAR的DEM提取[J]. 电子与信息学报, 2015, 37(6): 1463–1469. doi: 10.11999/JEIT141022LIU Yan, LIN Yun, TAN Weixian, et al. DEM extraction based on interferometric circular SAR[J]. Journal of Electronics &Information Technology, 2015, 37(6): 1463–1469. doi: 10.11999/JEIT141022 [38] LIU Jiayin, QIU Xiaolan, and HONG Wen. Automated ortho-rectified SAR image of GF-3 satellite using reverse-range-Doppler method[C]. 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 2016: 4445–4448. [39] YOO J C and HAN T H. Fast normalized cross-correlation[J]. Circuits, Systems and Signal Processing, 2009, 28(6): 819–843. doi: 10.1007/s00034-009-9130-7 -




图(10) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

