
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 传统相干雷达信号处理流程对跨距离单元走动的目标一般采用脉冲压缩与Radon傅里叶变换(RFT)先后级联的处理方法,但级联方法存在以下问题:一是对高速目标能量积累的过程中目标峰值位置偏移甚至主瓣展宽、增益下降、旁瓣增高;二是缺少有效杂波抑制,影响弱目标检测。为此,该文借鉴多维信号联合以及杂波抑制的思想,提出一种杂波背景条件下将脉冲压缩、RFT与自适应杂波抑制联合的时距联合检测前聚焦方法(A-PCRFT)。该方法首先将脉内时间(快时间)与脉间时间(慢时间)两个雷达信号处理维度相联合,引入与高速目标相对应的二维导向矢量,补偿脉内和脉间的多普勒频移;然后根据辅助数据估计脉冲压缩前的杂波协方差矩阵;最后根据杂波协方差矩阵和导向矢量确定最优滤波器权矢量。在距离-速度二维空间中,该方法能有效地抑制杂波,同时对目标能量进行最佳聚焦。仿真结果表明,该方法与先脉冲压缩后自适应Radon傅里叶变换(ARFT)的级联方法相比性能更优。
-
关键词:
- 脉冲压缩 /
- Radon傅里叶变换 /
- 自适应杂波抑制 /
- 时距联合 /
- 检测前聚焦
Abstract: The traditional coherent radar signal processing generally adopts the cascaded processing method of pulse compression and Radon-Fourier Transform (RFT) for a target moving across the range cell. However, the cascaded processing exhibits the following problems: first, during the energy integration of a high-speed target, problems including the offset of the target peak, even broadening of the main lobe, gain reduction and increases in the side lobes will occur; second, the lack of effective clutter suppression affects the detection of weak targets. Based on the multi-dimensional signal combination and clutter suppression, this paper proposes a Time-Range Focus-Before-Detect method (Adaptive-Pulse Compression Radon-Fourier Transform, A-PCRFT) in clutter background, which combines the pulse compression, RFT and adaptive clutter suppression. First, the method combines the two radar signal processing dimensions of intra-pulse time (fast time) and inter-pulse time (slow time). The two-dimensional steering vector corresponding to the high-speed target is introduced to compensate for the intra-pulse time and inter-pulse Doppler shifts; Then, the clutter covariance matrix before pulse compression is estimated based on the secondary data; Finally, the optimal filter weight vector is determined according to the clutter covariance matrix and the steering vector. This method can effectively suppress the clutter and focus the target energy simultaneously in the range-velocity space. Simulation results show that this method is superior to the cascaded method, which adopts the pulse compression and adaptive Radon–Fourier transform. -

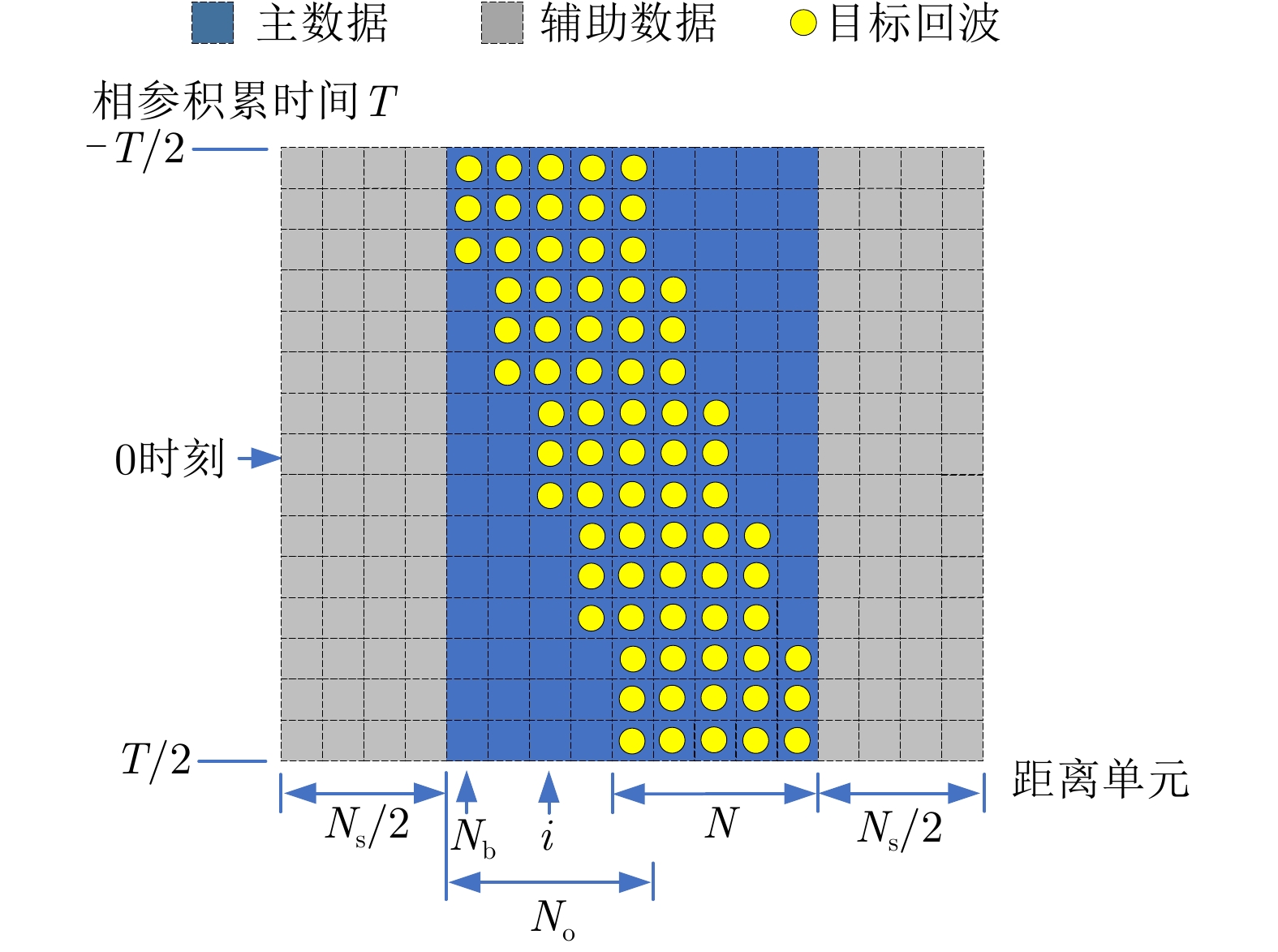
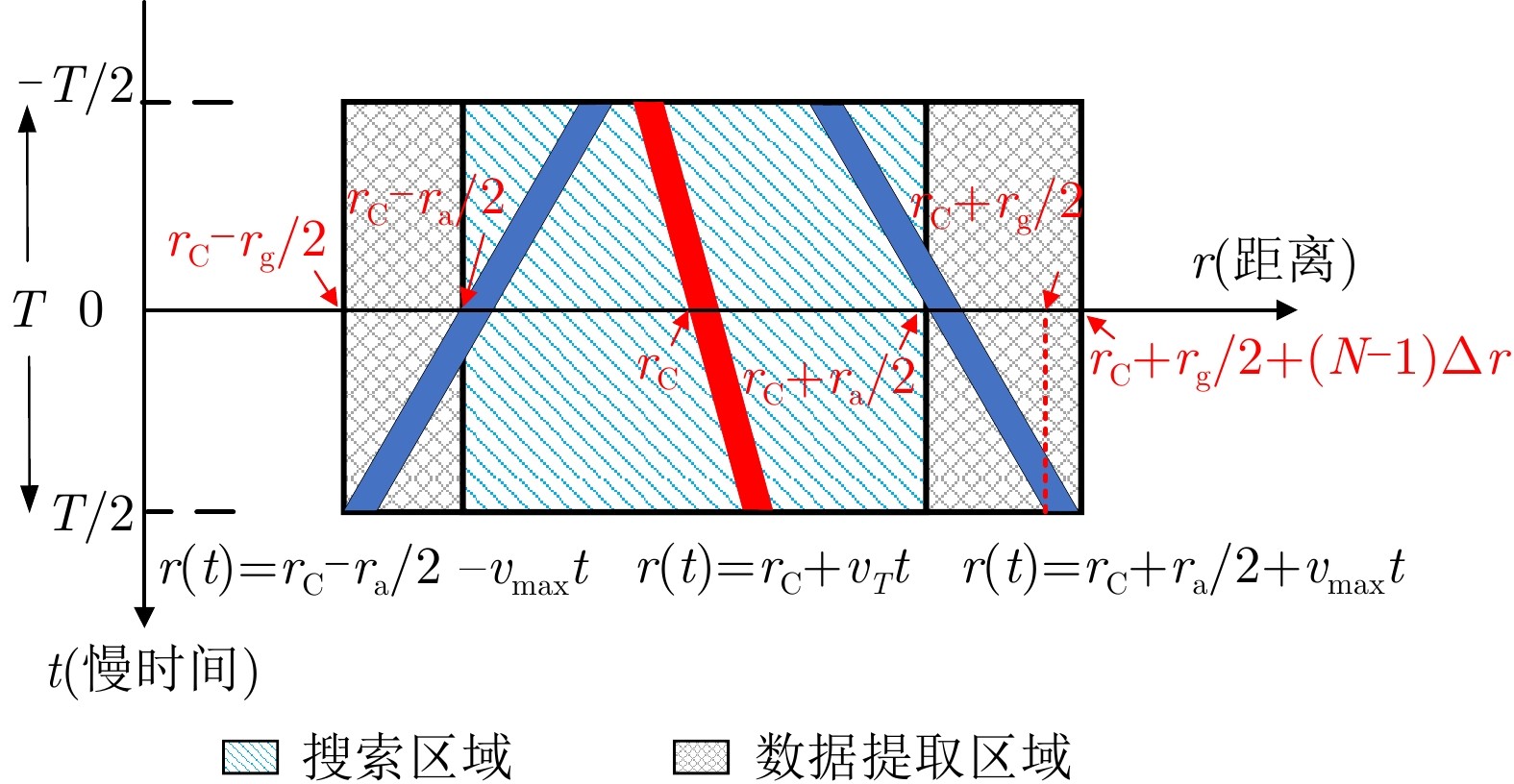
图 1 PC-RFT方法的参数搜索与数据提取区域
Figure 1. Parameter search and data extraction area of PC-RFT
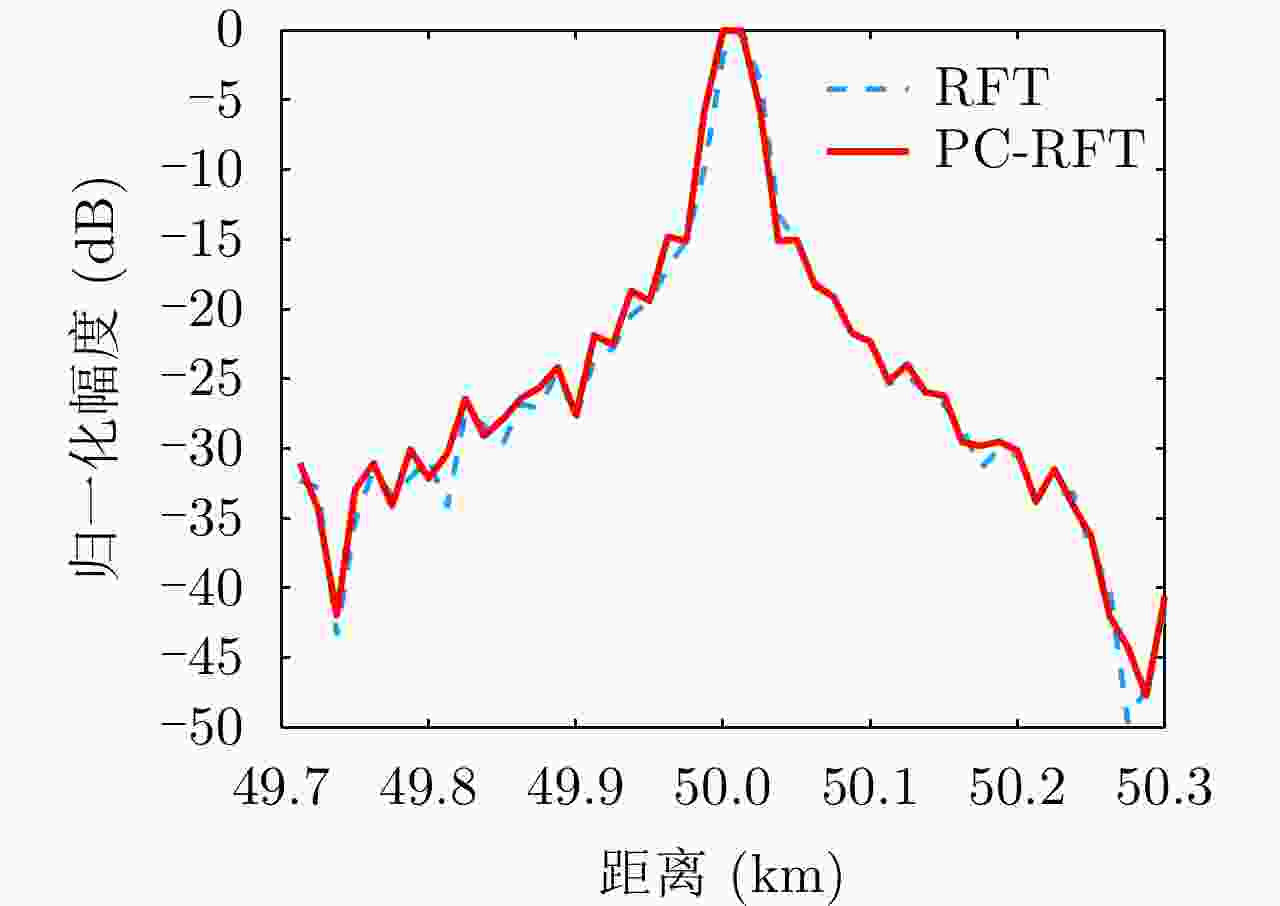
图 6 RFT与PC-RFT所得目标速度切片处的距离维输出
Figure 6. Range dimension output at target’s velocity slice from RFT and PC-RFT

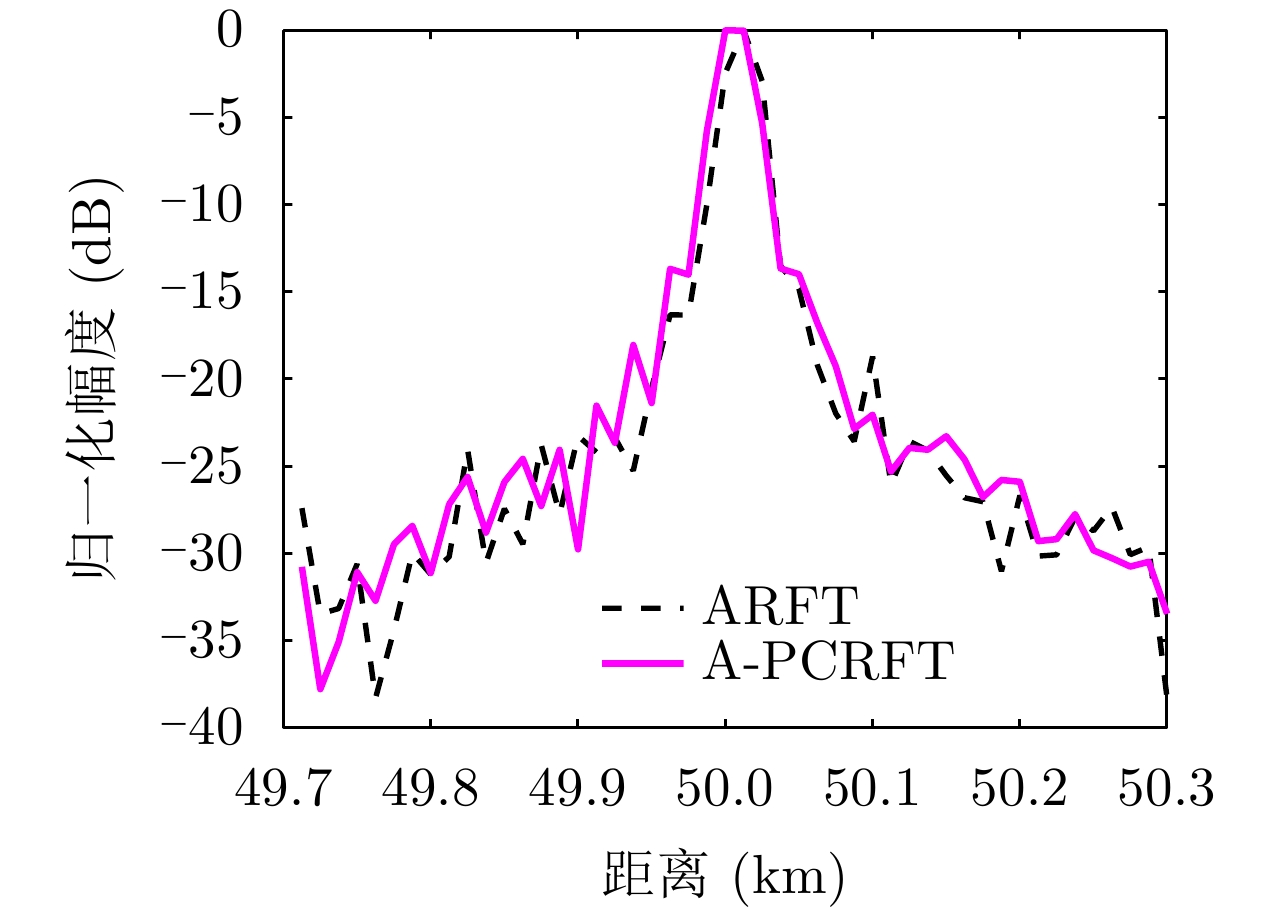
图 8 ARFT与A-PCRFT所得目标速度切片处的距离维输出
Figure 8. Range dimension output at target’s velocity slice from ARFT and A-PCRFT
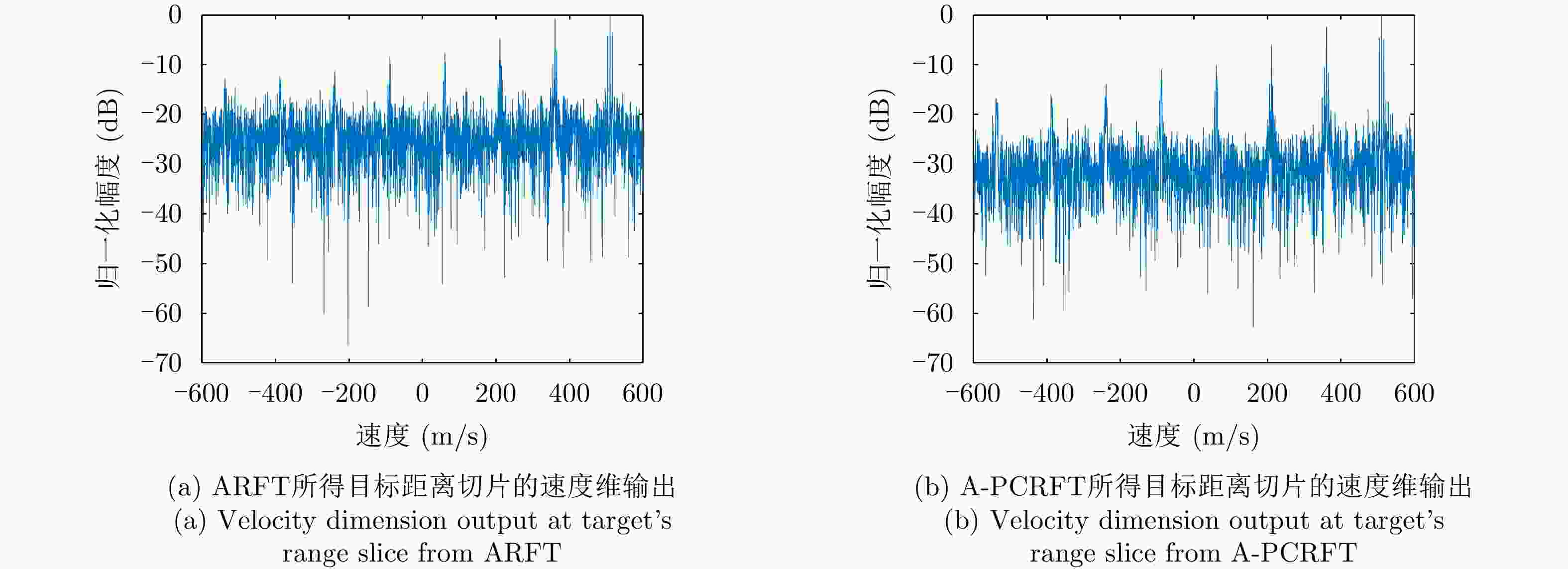
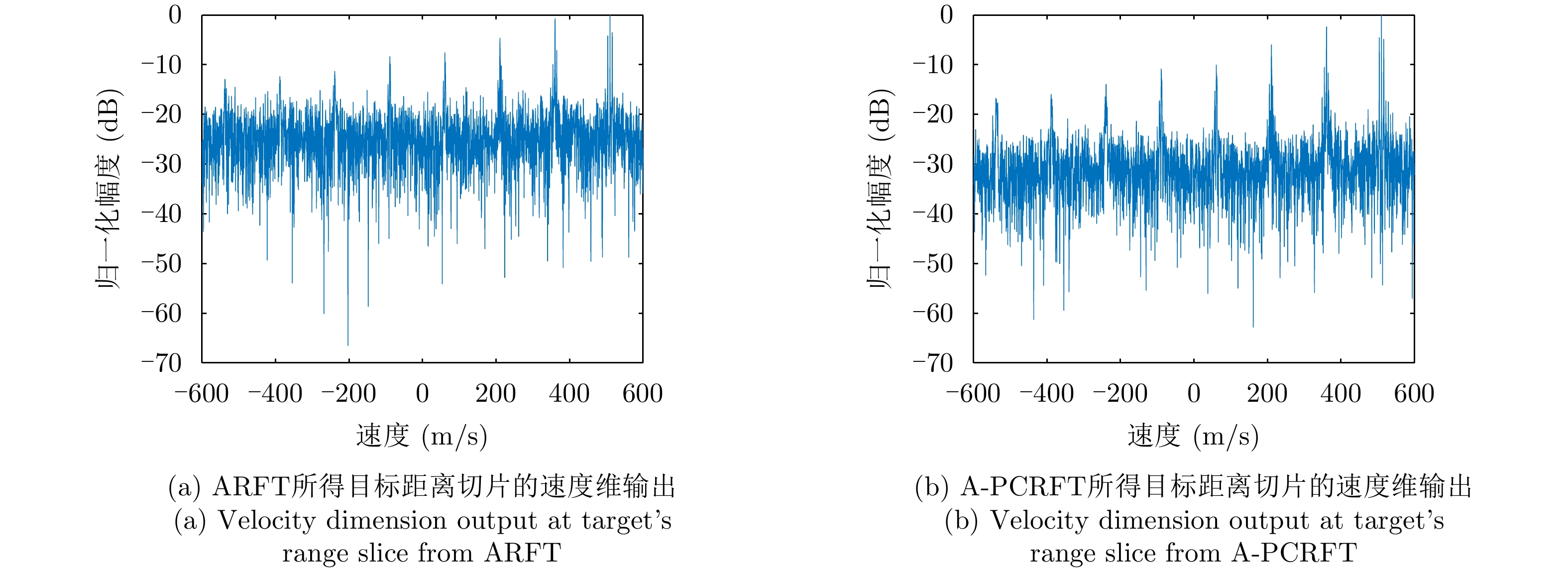
图 9 ARFT与A-PCRFT速度维输出结果对比
Figure 9. Comparison of velocity dimension output result between ARFT and A-PCRFT
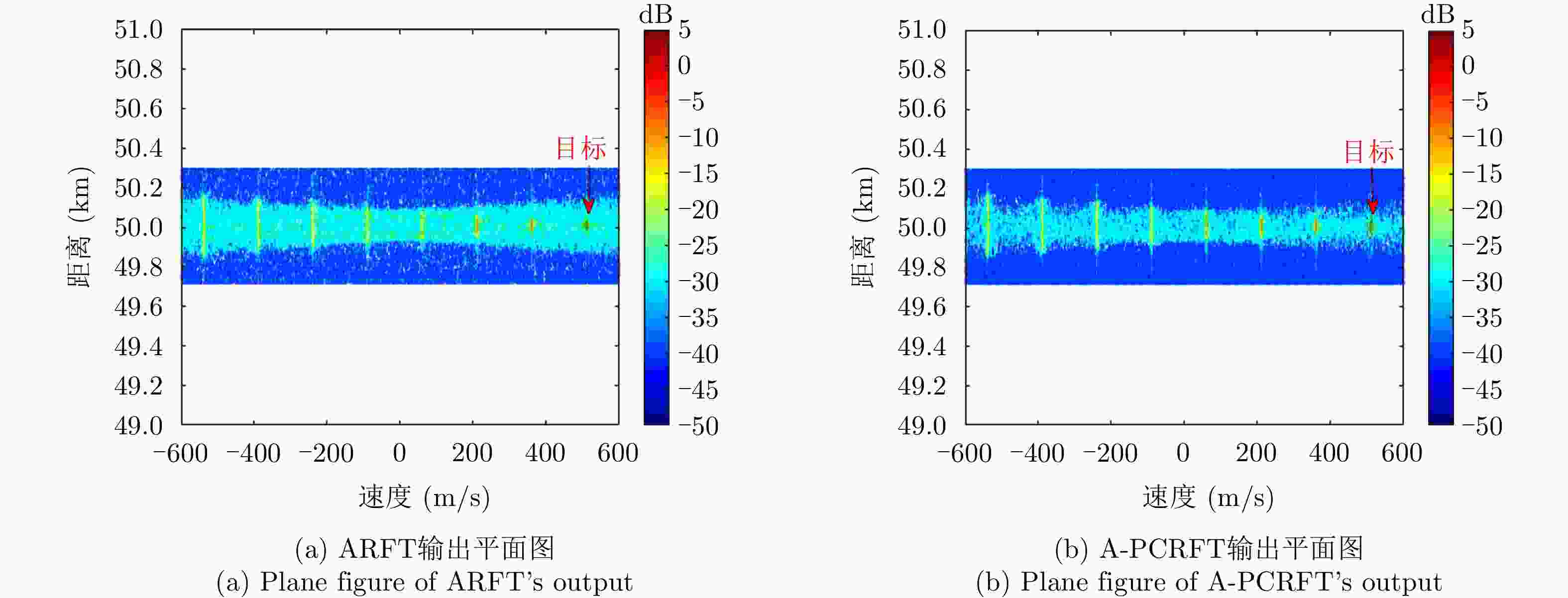
图 10 ARFT与A-PCRFT输出平面图对比
Figure 10. Comparison between the plane figures of ARFT and A-PCRFT
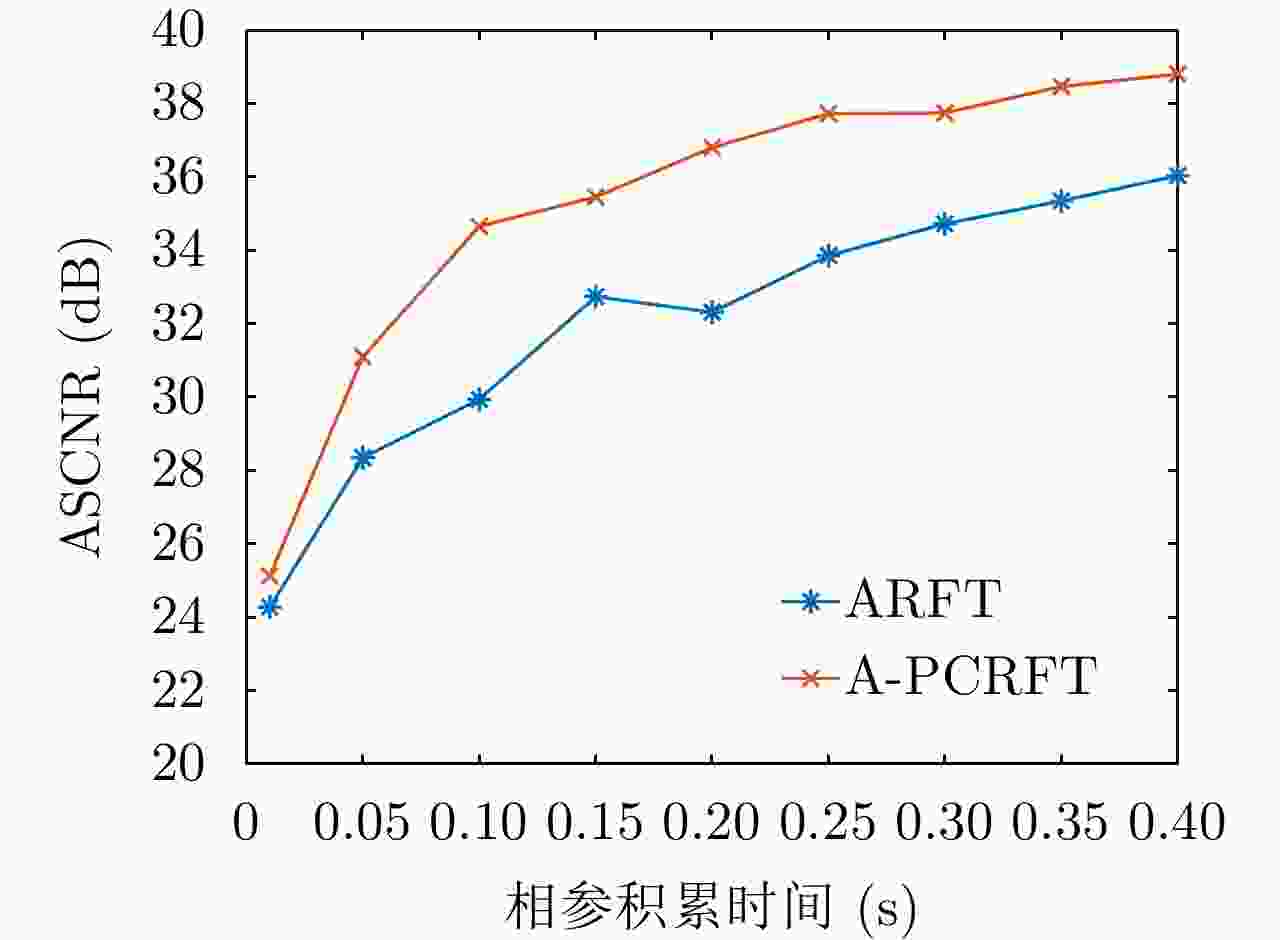
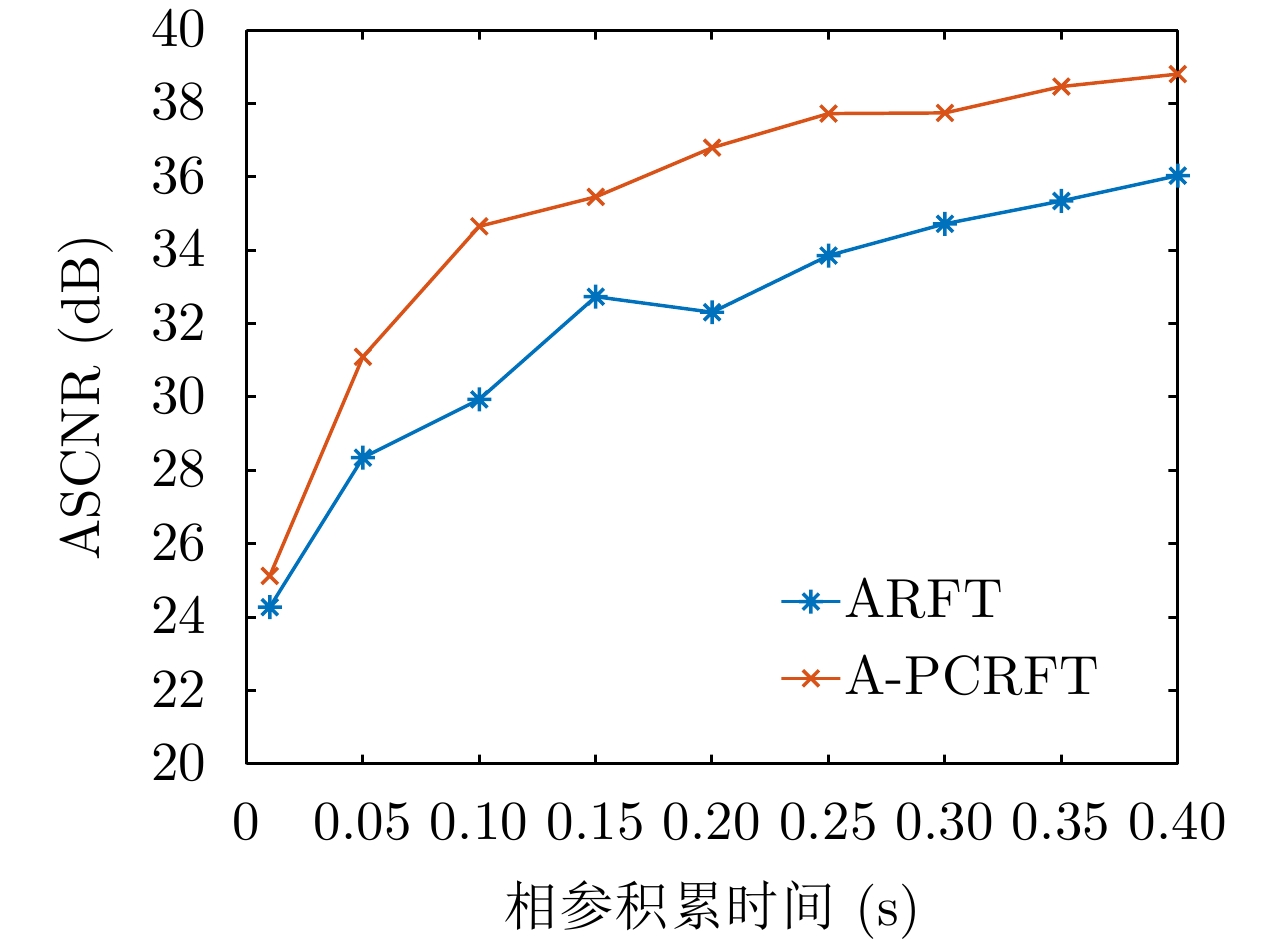
图 11 ARFT与A-PCRFT输出的平均信杂噪比与相参积累时间的关系
Figure 11. Relationship between coherent accumulation time and ASCNRs of ARFT and A-PCRFT methods
-
[1] GRECO M, GINI F, and FARINA A. Radar detection and classification of jamming signals belonging to a cone class[J]. IEEE Transactions on Signal Processing, 2008, 56(5): 1984–1993. doi: 10.1109/TSP.2007.909326 [2] 闫亮. 强杂波环境下微弱目标自适应检测方法研究[D]. [博士论文], 北京理工大学, 2018.YAN Liang. Research on adaptive detection methods of weak target in heavy clutter scenario[D]. [Ph. D. dissertation], Beijing Institute of Technology, 2018. [3] WANG Chunlei, JIU Bo, and LIU Hongwei. Maneuvering target detection in random pulse repetition interval radar via resampling-keystone transform[J]. Signal Processing, 2021, 181: 107899. doi: 10.1016/j.sigpro.2020.107899 [4] WAN Jun, TAN Xiaoheng, CHEN Zhanye, et al. Refocusing of ground moving targets with Doppler ambiguity using keystone transform and modified second-order keystone transform for synthetic aperture radar[J]. Remote Sensing, 2021, 13(2): 117. doi: 10.3390/rs13020177 [5] KONG Lingjiang, LI Xiaolong, CUI Guolong, et al. Coherent integration algorithm for a maneuvering target with High-Order range migration[J]. IEEE Transactions on Signal Processing, 2015, 63(17): 4474–4486. doi: 10.1109/TSP.2015.2437844 [6] LI Xiaolong, CUI Guolong, YI Wei, et al. Manoeuvring target detection based on keystone transform and Lv's distribution[J]. IET Radar, Sonar & Navigation, 2016, 10(7): 1234–1242. doi: 10.1049/iet-rsn.2015.0488 [7] KIRKLAND D. Imaging moving targets using the second-order keystone transform[J]. IET Radar, Sonar & Navigation, 2011, 5(8): 902–910. doi: 10.1049/iet-rsn.2010.0304 [8] DAI Chunyang, ZHANG Xiaoling, and SHI Jun. Range cell migration correction for bistatic SAR image formation[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(1): 124–128. doi: 10.1109/LGRS.2011.2162056 [9] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection, I: Generalized Doppler filter bank[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1186–1202. doi: 10.1109/TAES.2011.5751251 [10] XU Jia, YU Ji, PENG Yingning, et al. Radon-Fourier transform for radar target detection (II): Blind speed sidelobe suppression[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2473–2489. doi: 10.1109/TAES.2011.6034645 [11] YU Ji, XU Jia, PENG Yingning, et al. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 991–1004. doi: 10.1109/TAES.2012.6178044 [12] TIAN Jing, CUI Wei, SHEN Qing, et al. High-speed maneuvering target detection approach based on joint RFT and keystone transform[J]. Science China Information Sciences, 2013, 56(6): 1–13. doi: 10.1007/s11432-013-4880-z [13] XU Jia, YU Ji, PENG Yingning, et al. Space-time radon-Fourier transform and applications in radar target detection[J]. IET Radar, Sonar & Navigation, 2012, 6(9): 846–857. doi: 10.1049/iet-rsn.2011.0132 [14] 许稼, 彭应宁, 夏香根, 等. 空时频检测前聚焦雷达信号处理方法[J]. 雷达学报, 2014, 3(2): 129–141. doi: 10.3724/SP.J.1300.2014.14023XU Jia, PENG Yingning, XIA Xianggen, et al. Radar signal processing method of space-time-frequency focus-before-detects[J]. Journal of Radars, 2014, 3(2): 129–141. doi: 10.3724/SP.J.1300.2014.14023 [15] XU Jia, YU Ji, PENG Yingning, et al. Focus-before-detect for radar target detection[C]. 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011: 430–433. [16] CHEN Xiaolong, GUAN Jian, LIU Ningbo, et al. Maneuvering target detection via radon-fractional Fourier transform-based long-time coherent integration[J]. IEEE Transactions on Signal Processing, 2014, 62(4): 939–953. doi: 10.1109/TSP.2013.2297682 [17] CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radon-linear canonical ambiguity function-based detection and estimation method for marine target with micromotion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(4): 2225–2240. doi: 10.1109/TGRS.2014.2358456 [18] 关键. 雷达海上目标特性综述[J]. 雷达学报, 2020, 9(4): 674–683. doi: 10.12000/JR20114GUAN Jian. Summary of marine radar target characteristics[J]. Journal of Radars, 2020, 9(4): 674–683. doi: 10.12000/JR20114 [19] KELLY E J. An adaptive detection algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1986, AES-22(2): 115–127. doi: 10.1109/TAES.1986.310745 [20] XU Jia, YAN Liang, ZHOU Xu, et al. Adaptive radon-Fourier transform for weak radar target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(4): 1641–1663. doi: 10.1109/TAES.2018.2798358 [21] YOU Pengjie, DING Zegang, QIAN Lichang, et al. A motion parameter estimation method for radar maneuvering target in Gaussian clutter[J]. IEEE Transactions on Signal Processing, 2019, 67(20): 5433–5446. doi: 10.1109/TSP.2019.2939082 [22] DING Zegang, YOU Pengjie, QIAN Lichang, et al. A subspace hybrid integration method for high-speed and maneuvering target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 630–644. doi: 10.1109/TAES.2019.2919478 [23] 裴家正, 黄勇, 陈宝欣, 等. 联合脉压与Radon傅里叶变换的长时间相参积累方法[J]. 雷达学报, 2021, 10(6): 956–969. doi: 10.12000/JR21068PEI Jiazheng, HUANG Yong, CHEN Baoxin, et al. Long time coherent integration method based on combining pulse compression and Radon-Fourier transform[J]. Journal of Radars, 2021, 10(6): 956–969. doi: 10.12000/JR21068 [24] 吴兆平, 符渭波, 苏涛, 等. 基于快速Radon-Fourier变换的雷达高速目标检测[J]. 电子与信息学报, 2012, 34(8): 1866–1871. doi: 10.3724/SP.J.1146.2011.01180WU Zhaoping, FU Weibo, SU Tao, et al. High speed radar target detection based on fast Radon-Fourier transform[J]. Journal of Electronics &Information Technology, 2012, 34(8): 1866–1871. doi: 10.3724/SP.J.1146.2011.01180 [25] 钱李昌, 许稼, 孙文峰, 等. 基于多载频MIMO雷达的Radon-Fourier变换盲速旁瓣抑制[J]. 航空学报, 2013, 34(5): 1181–1190. doi: 10.7527/S1000-6893.2013.0073QIAN Lichang, XU Jia, SUN Wenfeng, et al. Blind speed side lobe suppression in Radon-Fourier transform based on MIMO radar with multi-carrier frequency[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(5): 1181–1190. doi: 10.7527/S1000-6893.2013.0073 [26] REED I S, MALLETT J D, and BRENNAN L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, AES-10(6): 853–863. doi: 10.1109/TAES.1974.307893 -

 下载:
下载:





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

