
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
An Improved Superpixel-based CFAR Method for High-resolution SAR Image Ship Target Detection(in English)
-
摘要:
合成孔径雷达(SAR)图像舰船目标检测一直受到学者广泛关注,恒虚警率(CFAR)检测算法作为雷达图像经典目标检测算法被广泛应用于SAR图像舰船目标检测中。然而经典CFAR检测性能容易受到相干斑噪声影响,基于滑窗的检测结果对滑窗的尺寸选择非常敏感,难以保证杂波背景中不存在目标像素,并且计算效率较低。针对上述问题,该文提出了一种新的基于超像素无窗快速CFAR的SAR图像舰船目标检测算法。首先,利用基于密度的快速噪声空间聚类(DBSCAN)超像素生成方法生成SAR图像的超像素。在SAR数据服从混合瑞利分布的假设下,定义了超像素相异度。然后利用超像素精确估计每个像素的杂波参数,即使在多目标情况下,也可以克服传统CFAR滑动窗口的缺点。此外,基于SAR图像变异系数,提出了一种基于变异系数的局部超像素对比度来优化CFAR检测,以此消除大量杂波虚警,如陆地区域人造目标。对5幅SAR图像的实验结果表明,与其他方法相比,该文方法对不同场景SAR图像海面舰船目标检测都十分稳健。
-
关键词:
- 合成孔径雷达(SAR) /
- 恒虚警率(CFAR) /
- 变异系数 /
- 超像素 /
- 目标检测
Abstract:Synthetic Aperture Radar (SAR) image ship target detection has attracted considerable attention. As a state-of-the-art method, the Constant False Alarm Rate (CFAR) detection algorithm is often used in SAR image ship target detection. However, the detection performance of the classical CFAR is easily affected by speckle noise. Moreover, the detection results based on the sliding window are sensitive to the size of the sliding window. Thus, ensuring that there are no target pixels in the cluttered background is difficult, which easily leads to a high computational load. This study proposes a new ship target detection method for SAR images based on fast superpixel-based non-window CFAR to solve these problems. The superpixel generation method of Density Based Spatial Clustering of Applications with Noise is used to generate superpixels for SAR images. Under the assumption that SAR data obey the Rayleigh mixture distribution, we define a superpixel dissimilarity measure. Then, the clutter parameters of each pixel are accurately estimated using superpixels, which can avoid the shortcomings of the traditional CFAR sliding window even in the case of multiple targets. A local contrast based on the Coefficient of Variation (CoV) of the SAR image is proposed to optimize the CFAR detection result, which can eliminate a large number of false alarms from man-made targets in urban areas. The experimental results of five real SAR images show that the proposed method for ship target detection in SAR images with different scenes is robust compared with other state-of-the-art methods.
-
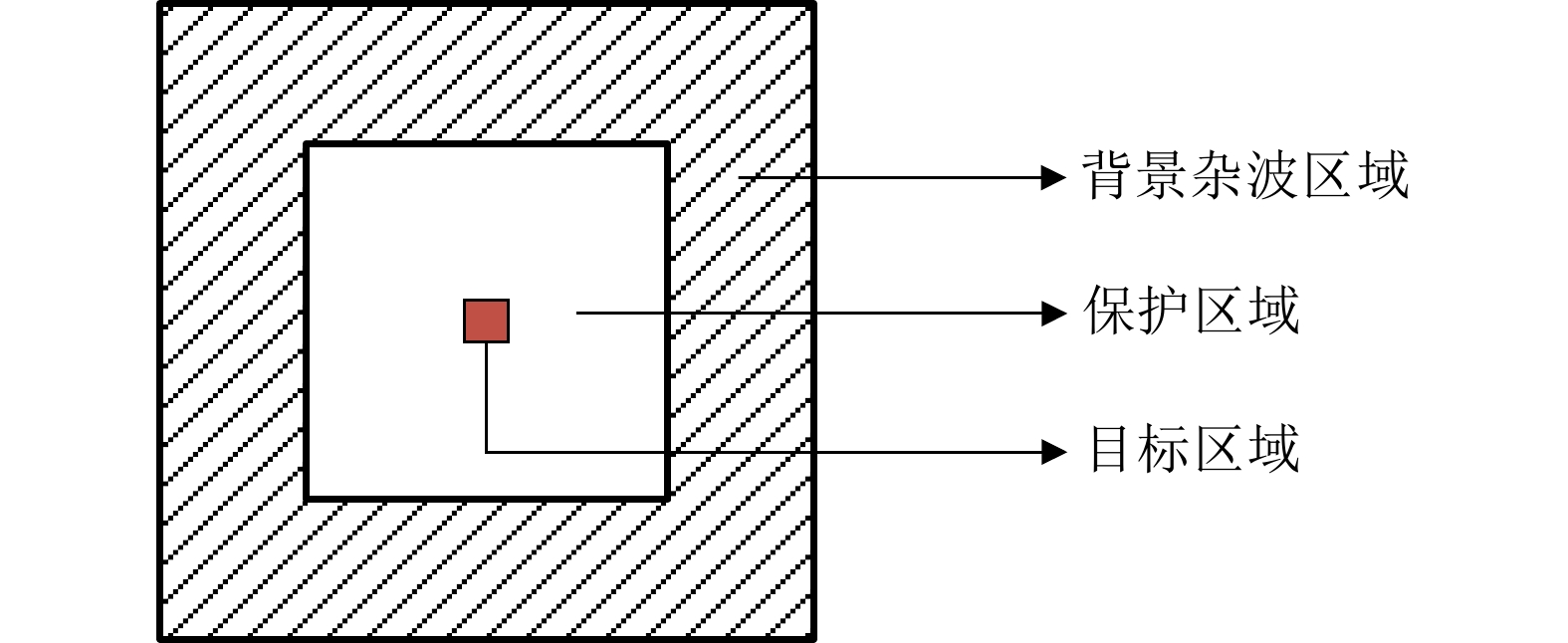
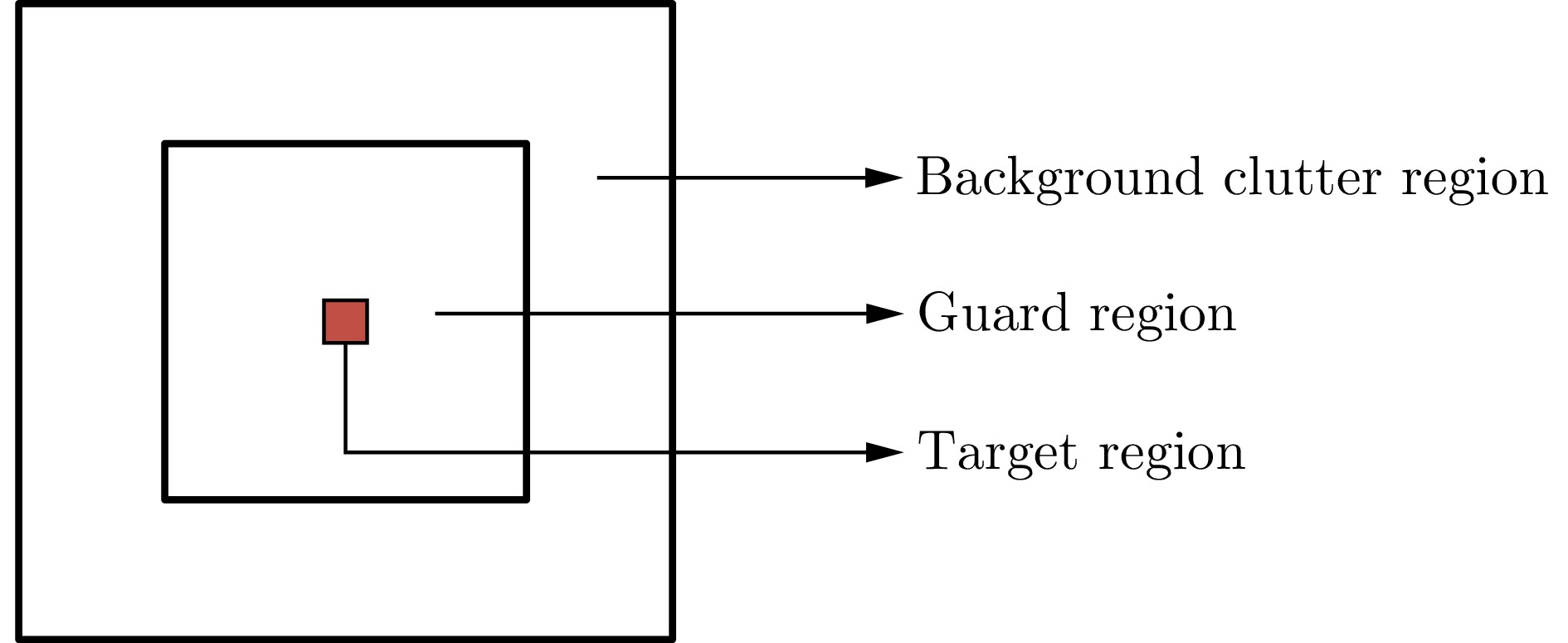
图 2 传统CFAR检测器滑动窗口示意图
Figure 2. Schematic diagram of the sliding window in the traditional CFAR detector
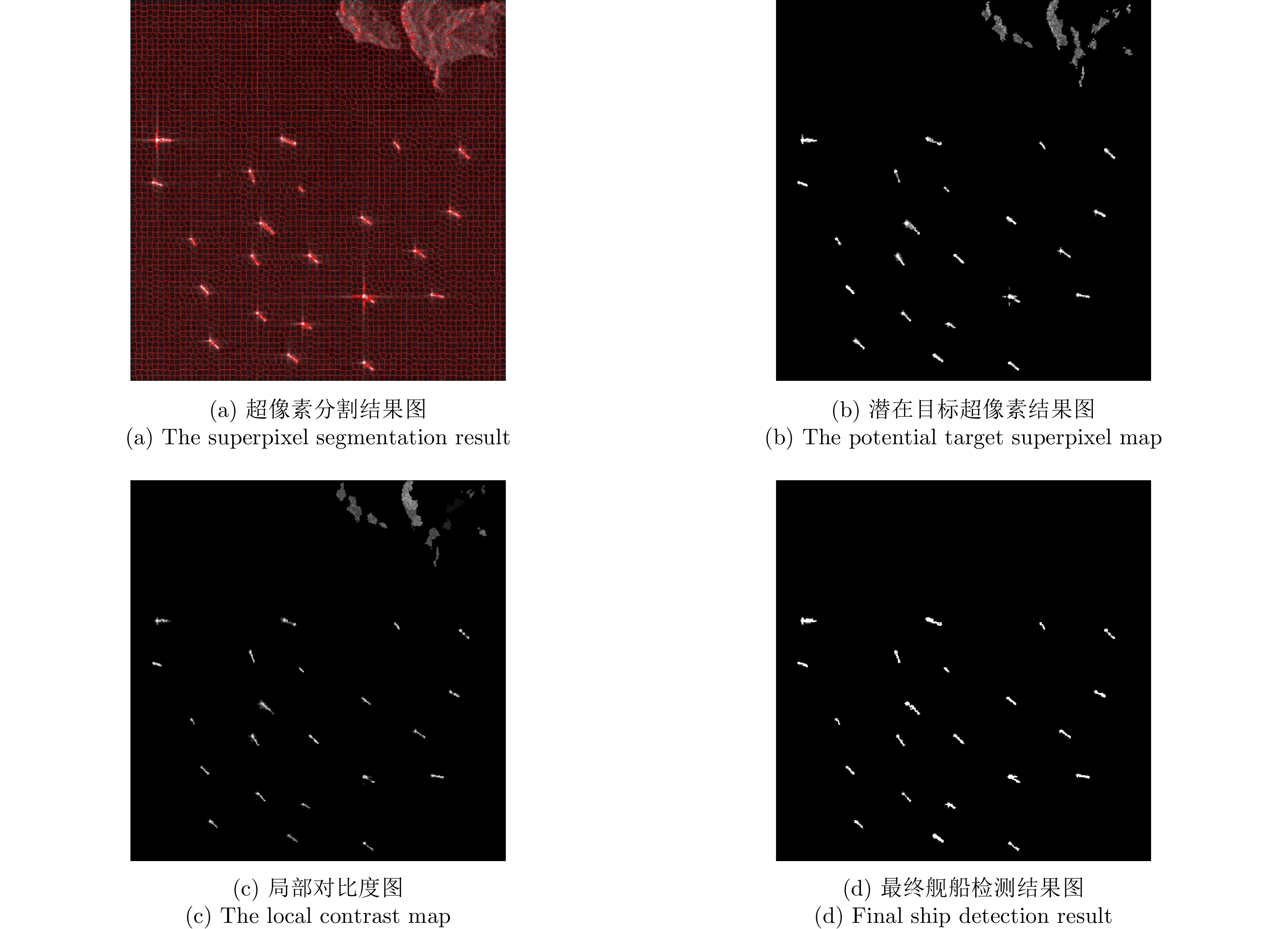
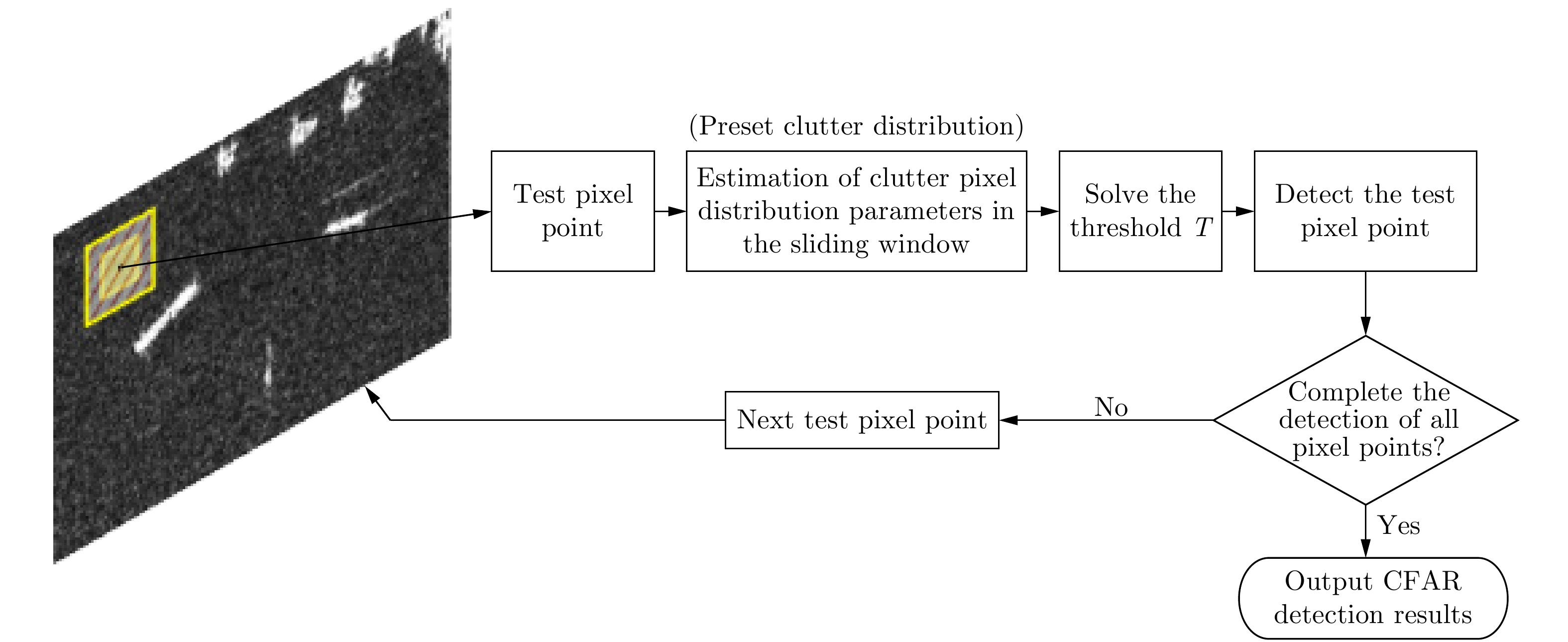
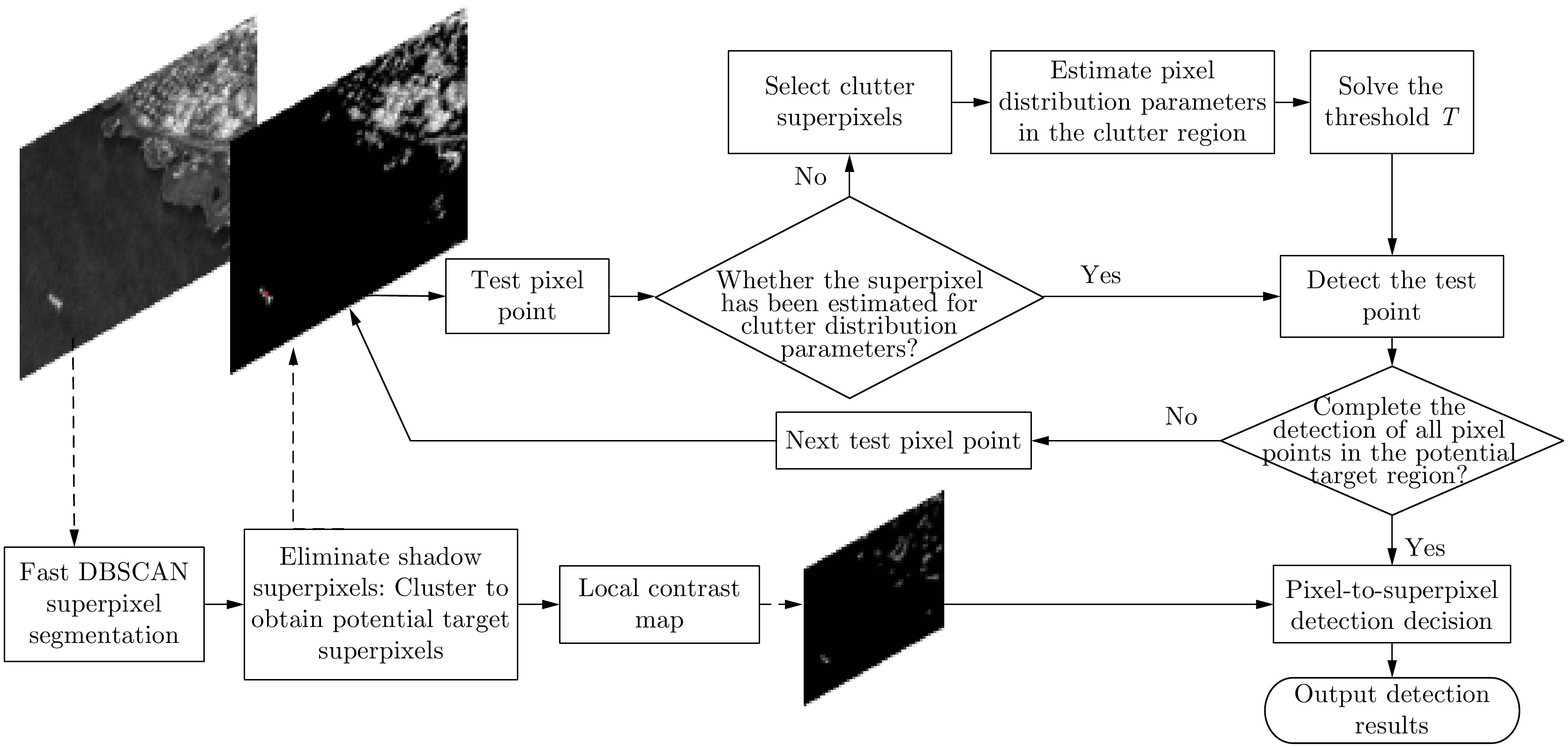
图 3 本文提出的基于超像素无窗快速CFAR的目标检测算法流程
Figure 3. Flow chart the proposed superpixel non-window fast CFAR strategy
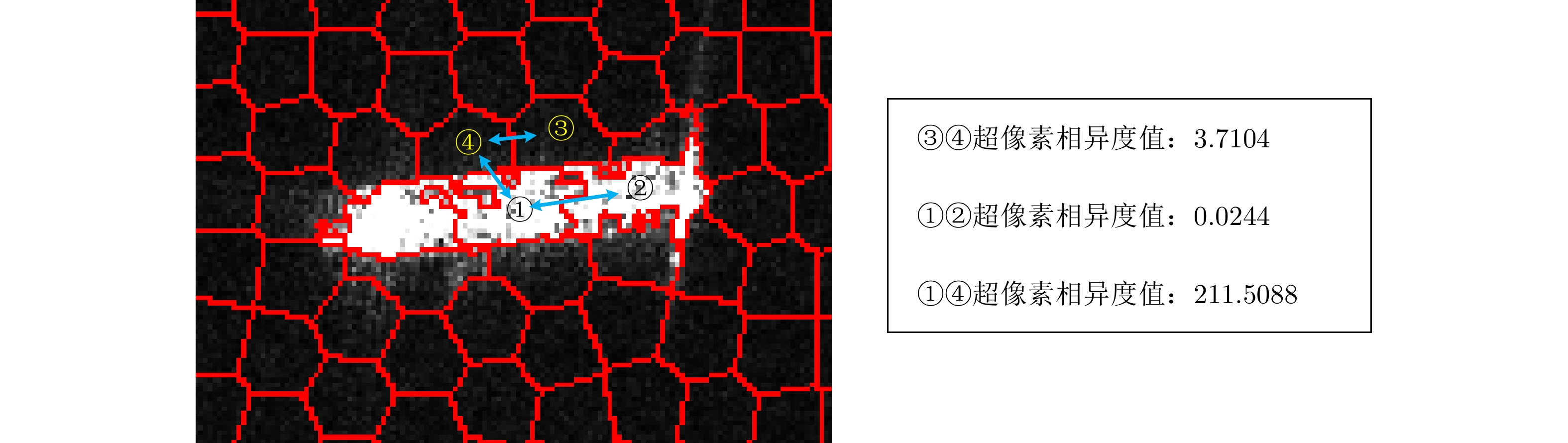
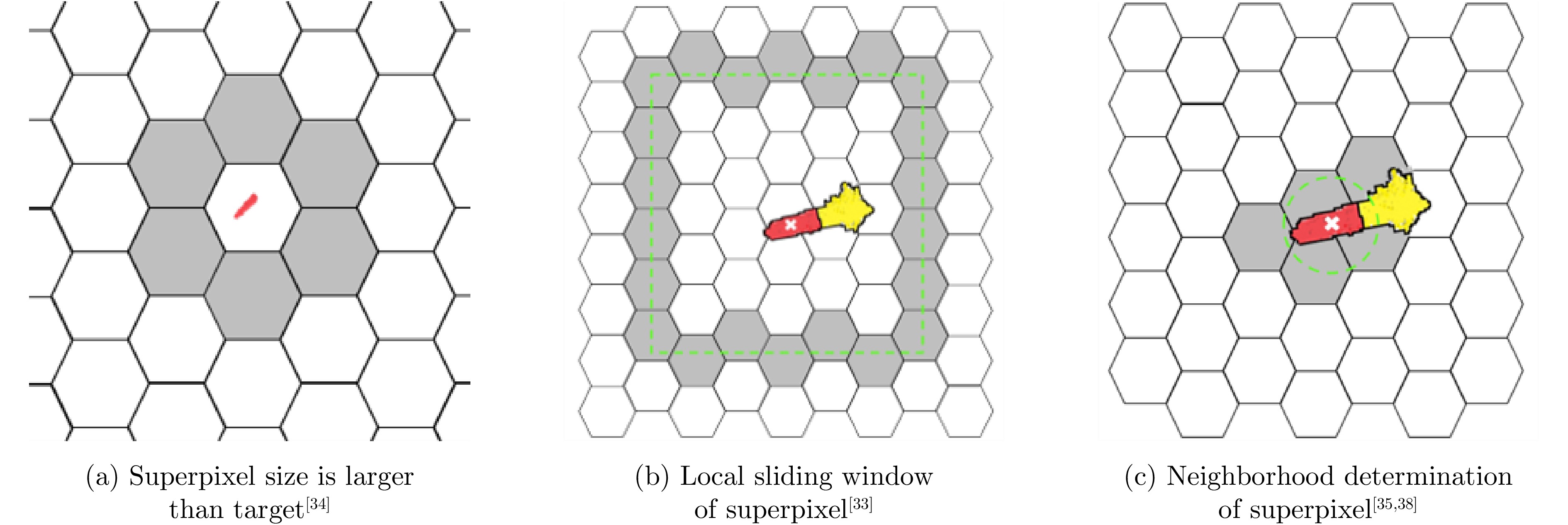
图 5 超像素相异度有效性分析示意图
Figure 5. Schematic diagram of superpixel dissimilarity effectiveness analysis

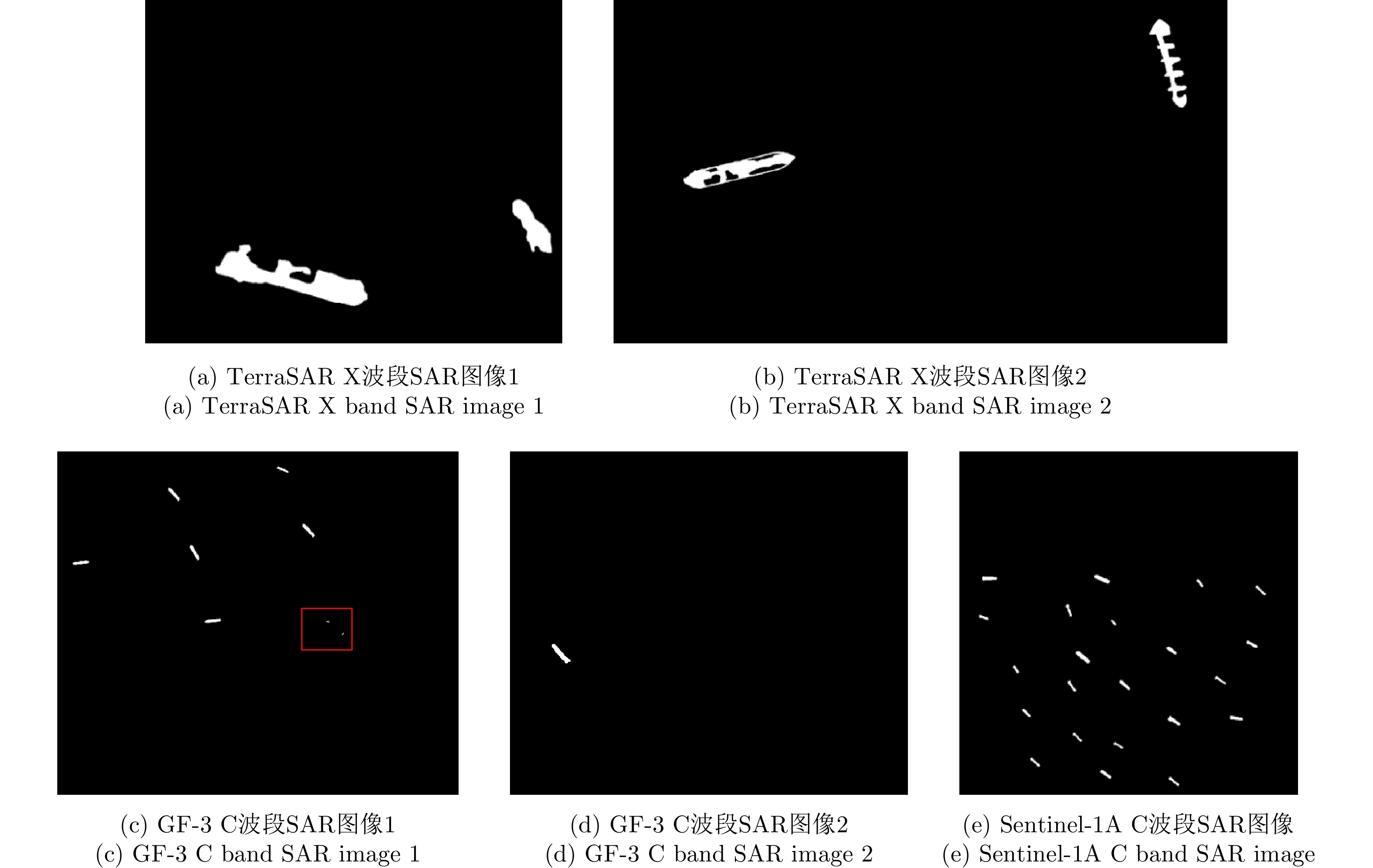
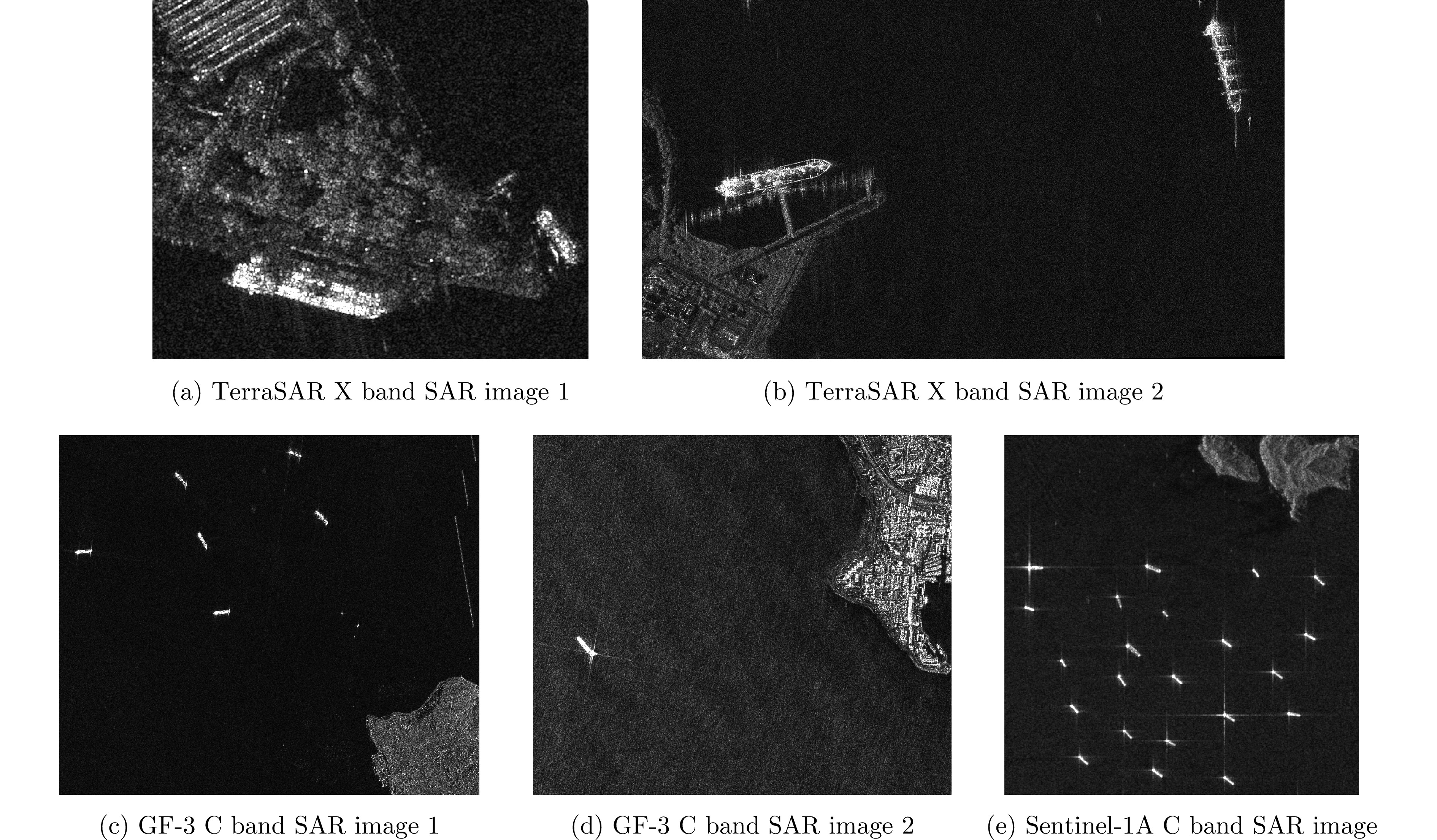
图 6 实验采用的不同波段不同分辨率的SAR图像
Figure 6. The SAR images with different bands and different resolutions in the experiment
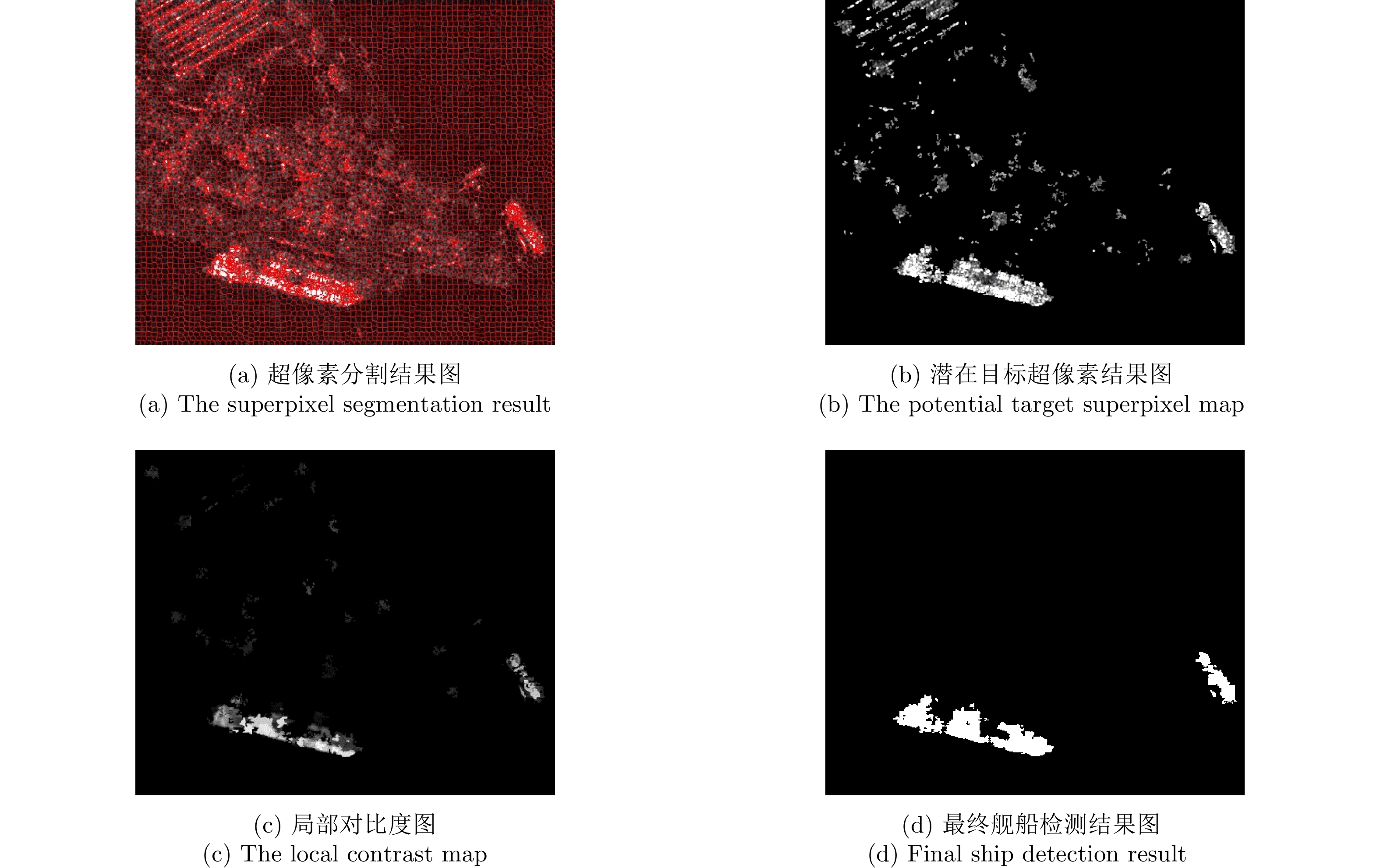
图 8 TerraSAR X波段SAR图像1检测结果图
Figure 8. The results of TerraSAR X band SAR image 1 with the proposed method
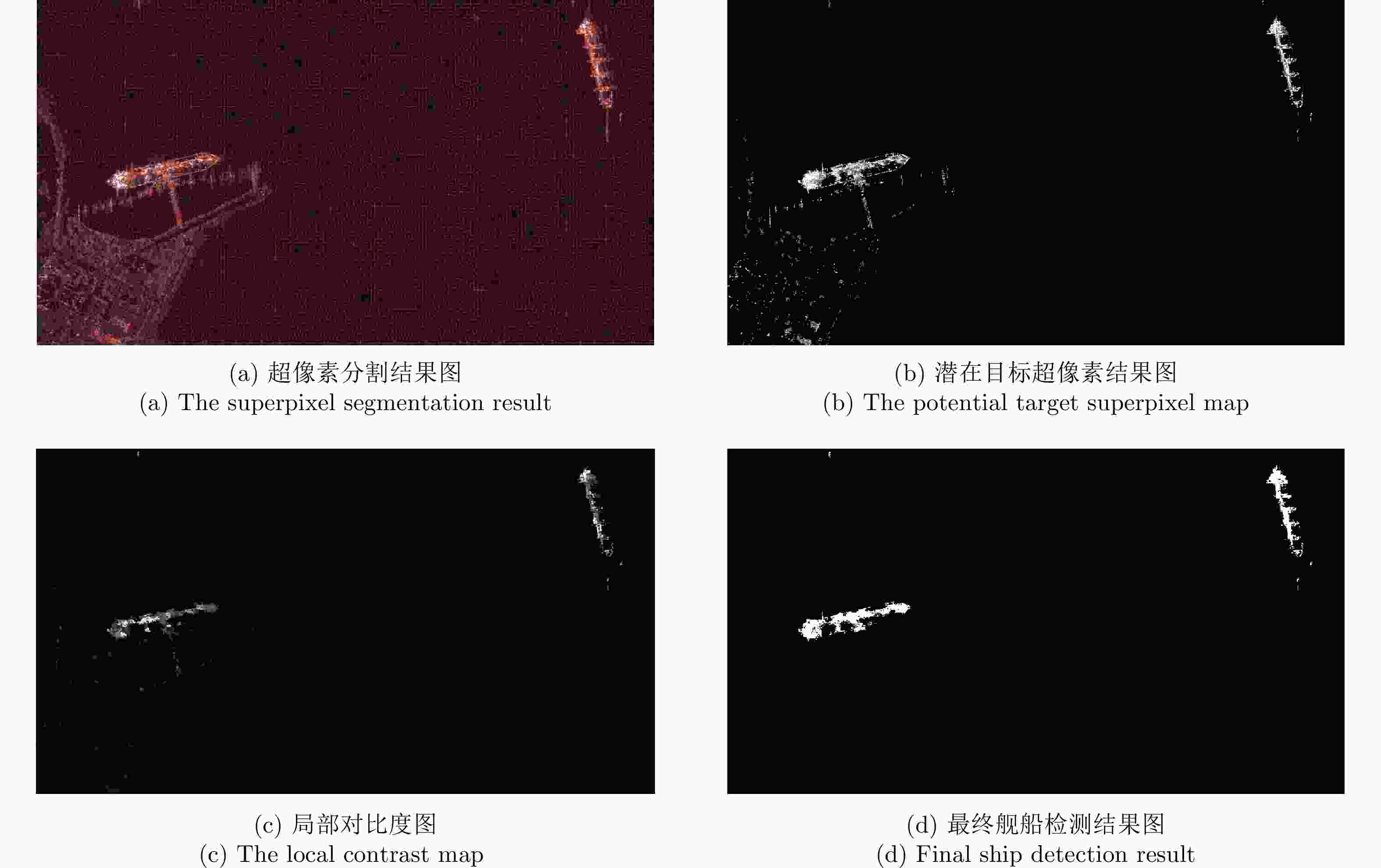
图 9 TerraSAR X波段SAR图像2检测结果图
Figure 9. The results of TerraSAR X band SAR image 2 with the proposed method
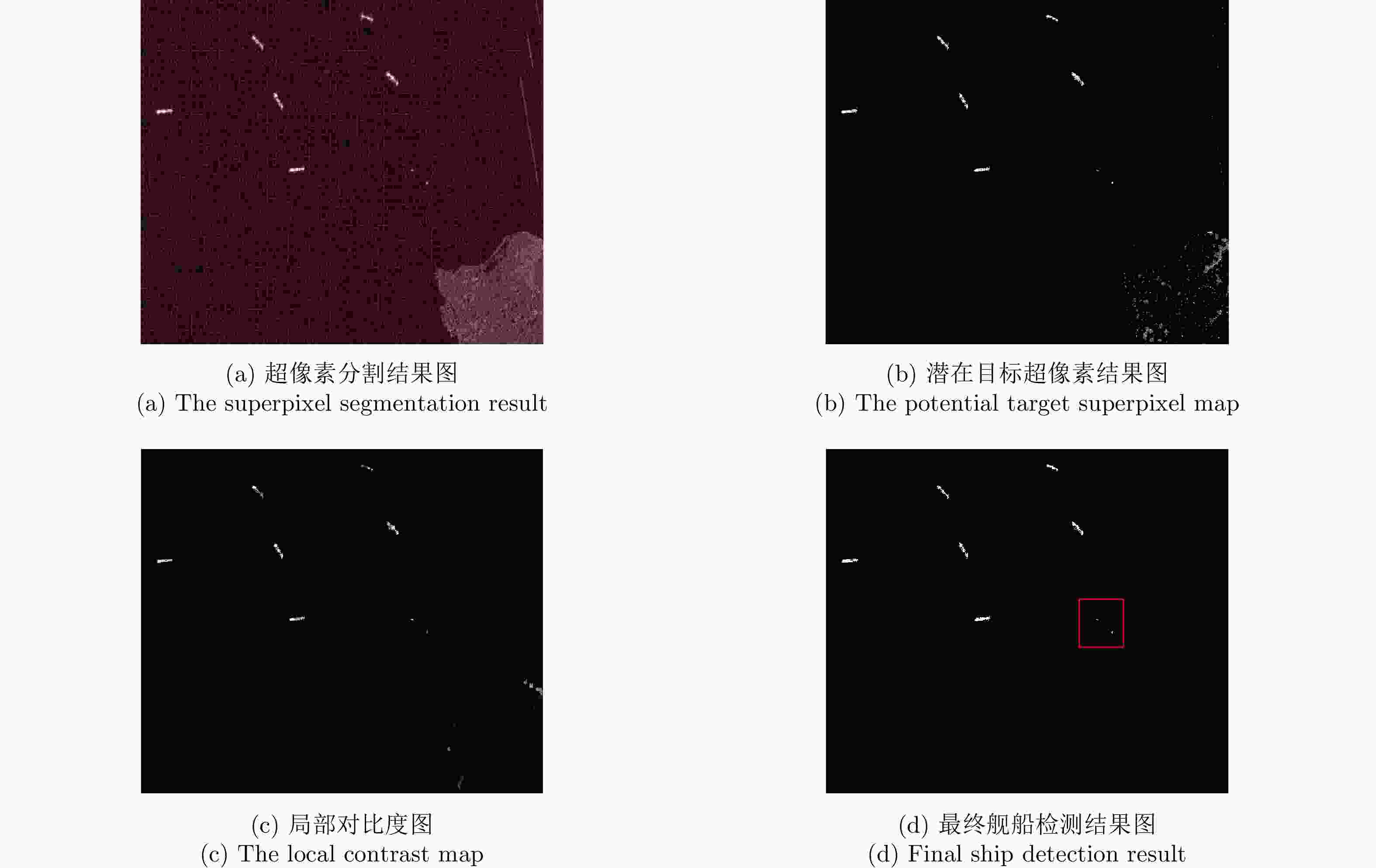
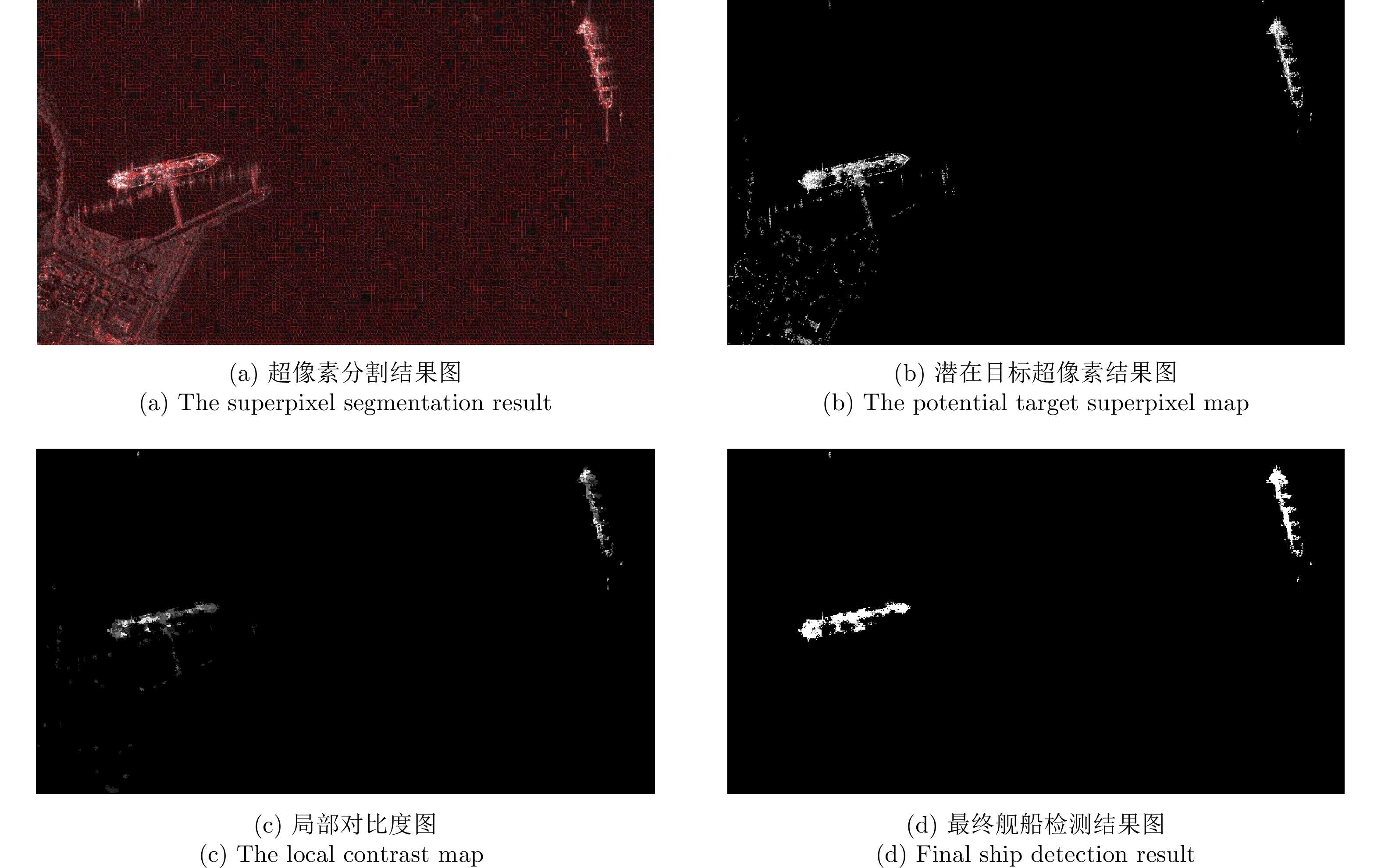
图 10 GF-3 C波段SAR图像1检测结果图
Figure 10. The results of GF-3 C band SAR image 1 with the proposed method
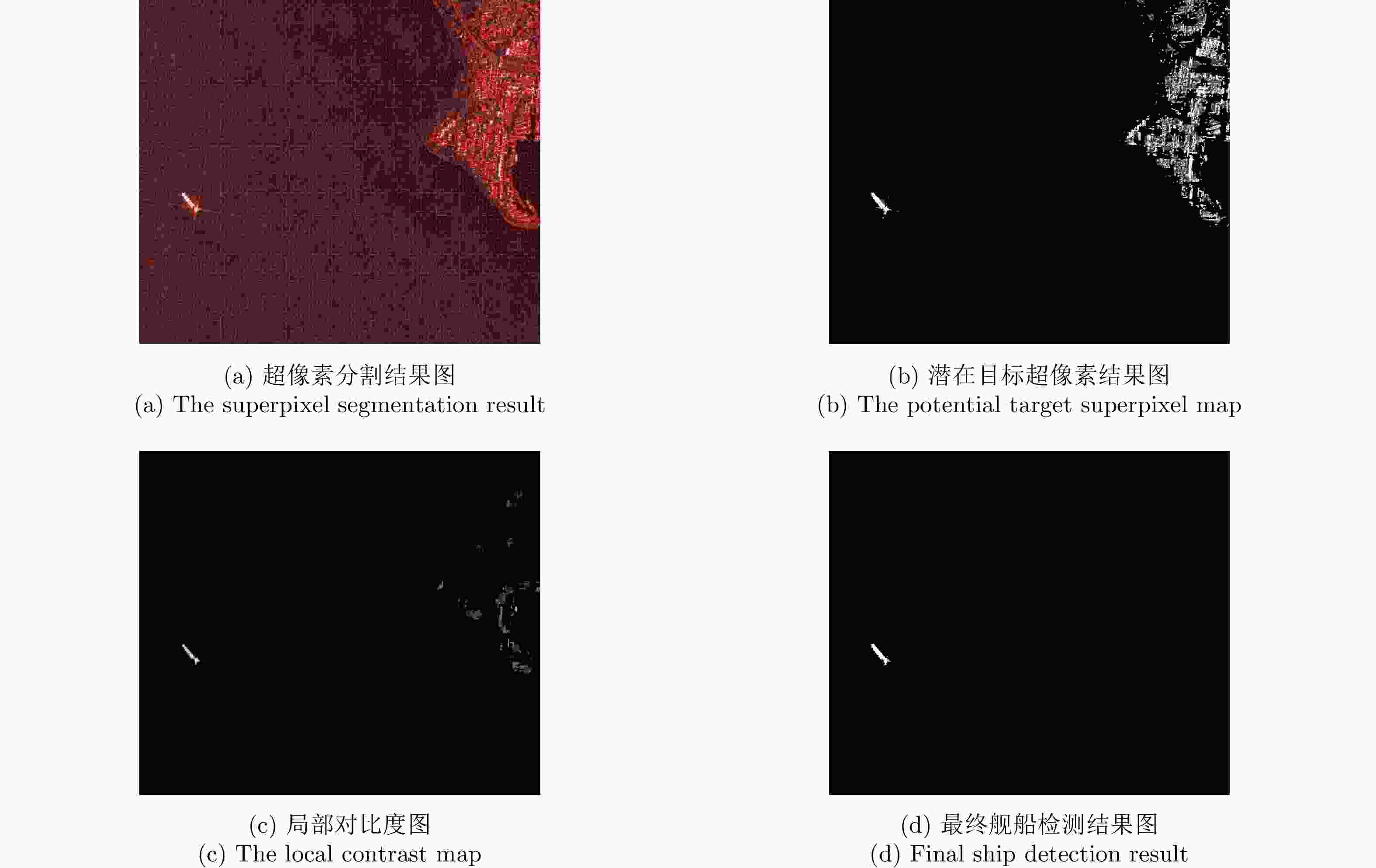
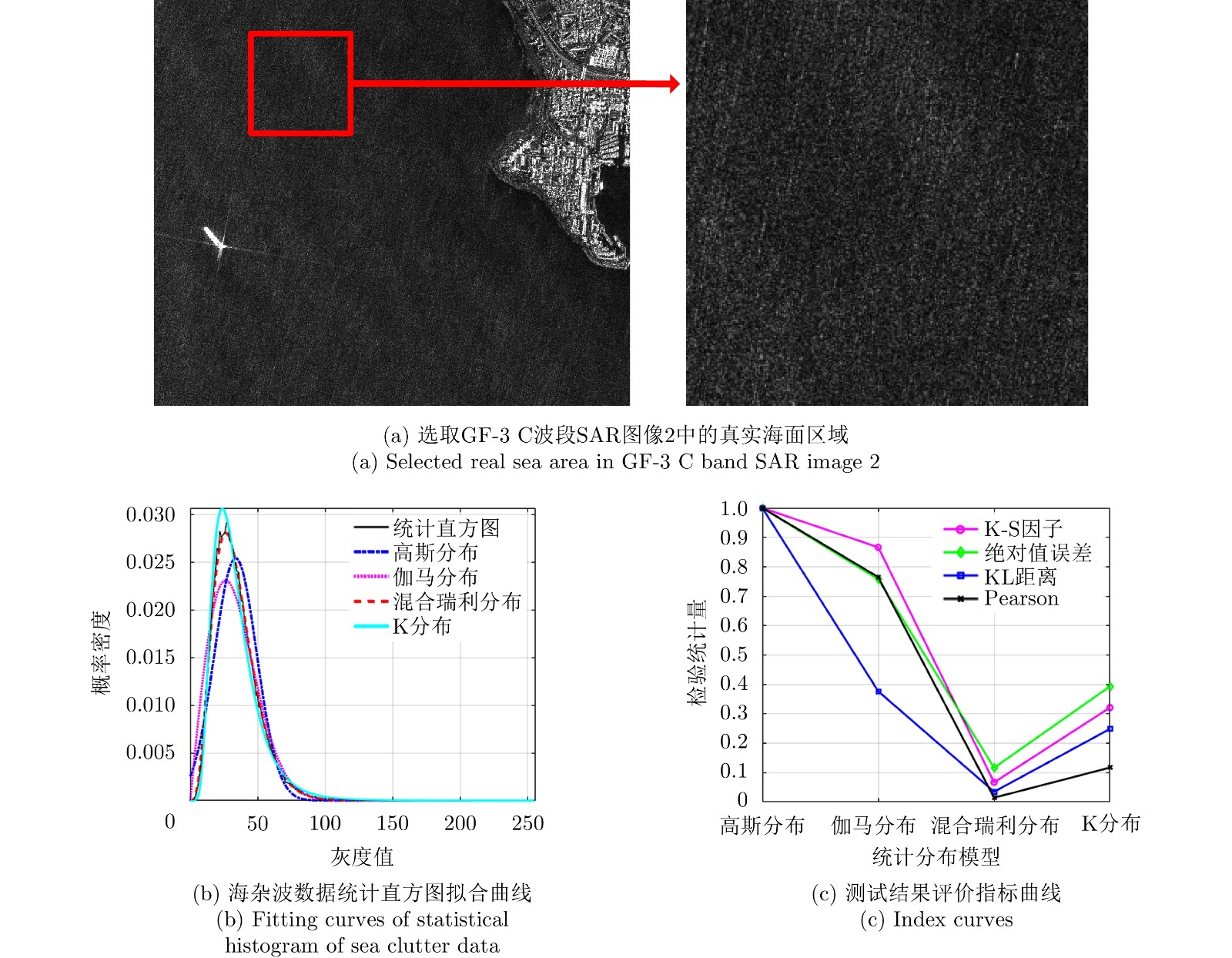
图 11 GF-3 C波段SAR图像2检测结果图
Figure 11. The results of GF-3 C band SAR image 2 with the proposed method
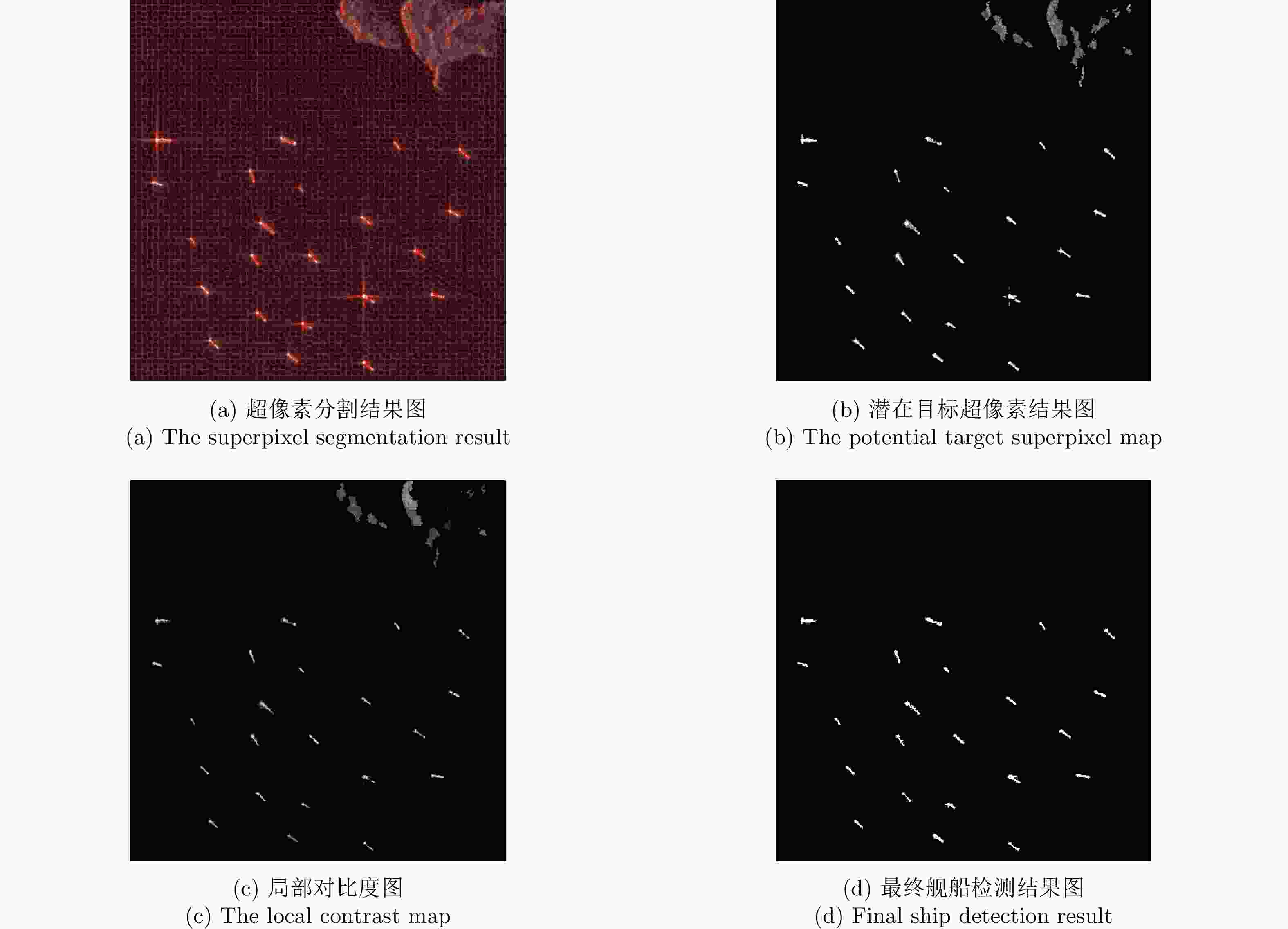
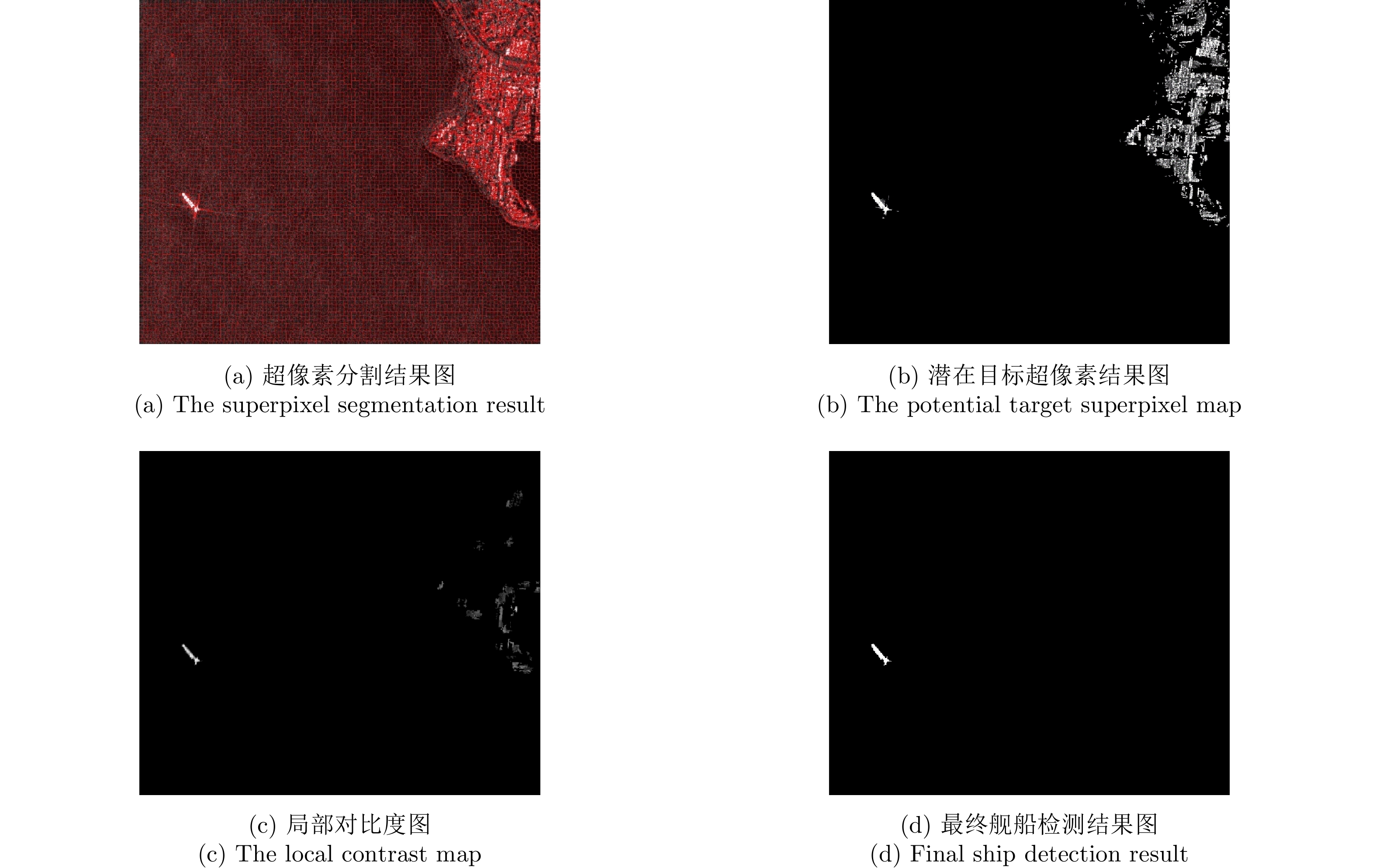
图 12 Sentinel-1A C波段SAR图像检测结果图
Figure 12. The results of Sentinel-1A C band SAR image with the proposed method

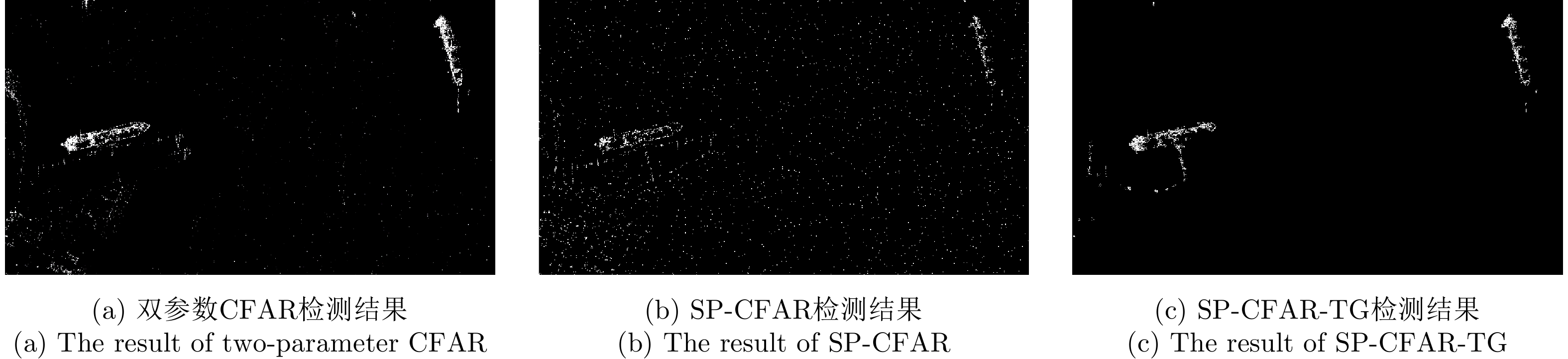
图 13 3种对比方法对TerraSAR X波段SAR图像1的检测结果
Figure 13. The detection results of TerraSAR X band SAR image 1 with three compared methods
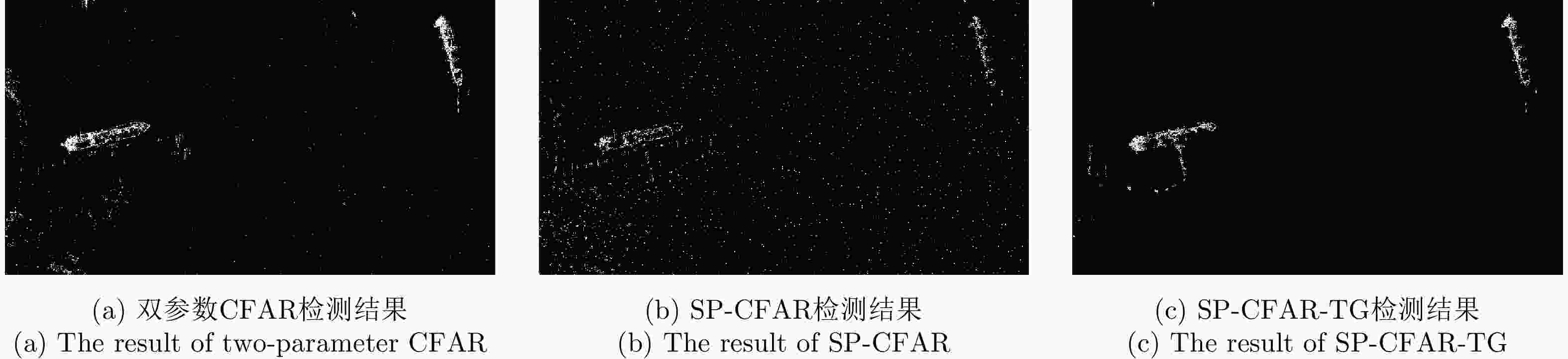
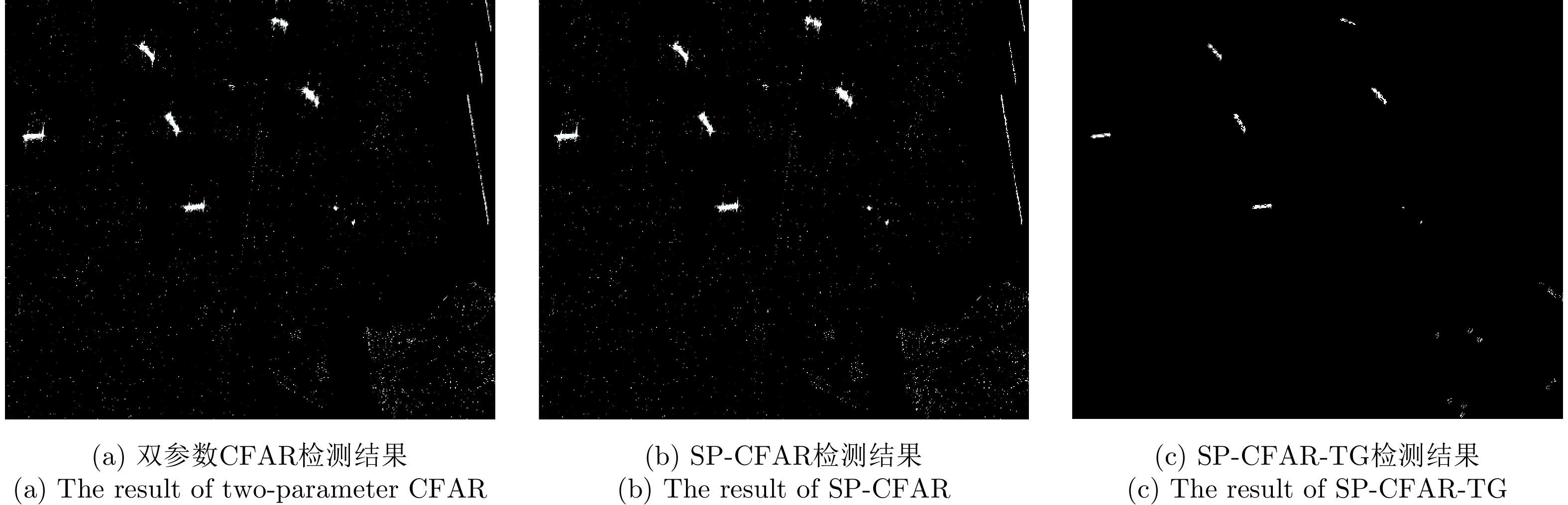
图 14 3种对比方法对TerraSAR X波段SAR图像2的检测结果
Figure 14. The detection results of TerraSAR X band SAR image 2 with three compared methods
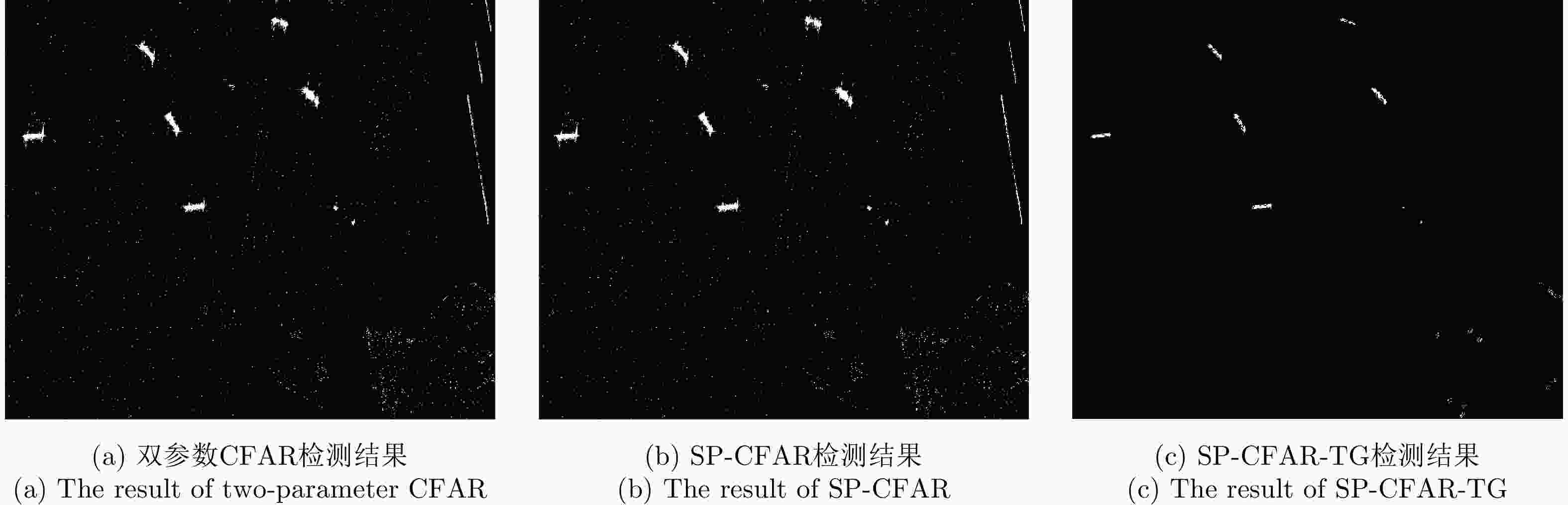
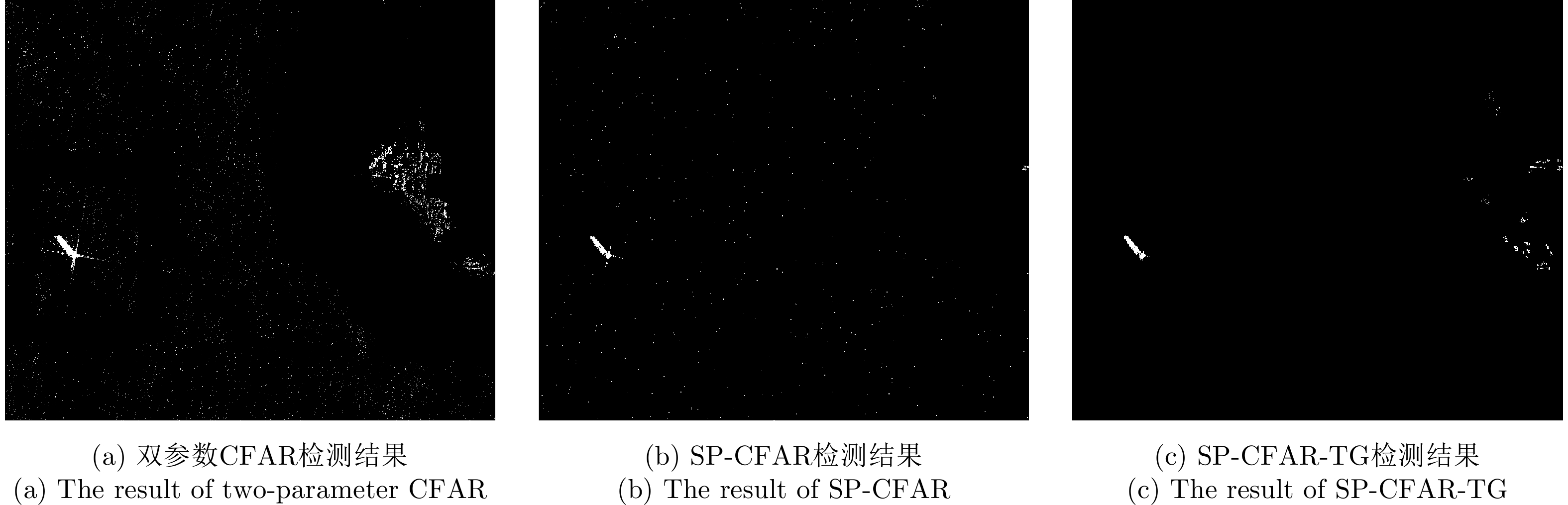
图 15 3种对比方法对GF-3 C波段SAR图像1的检测结果
Figure 15. The detection results of GF-3 C band SAR image 1 with three compared methods
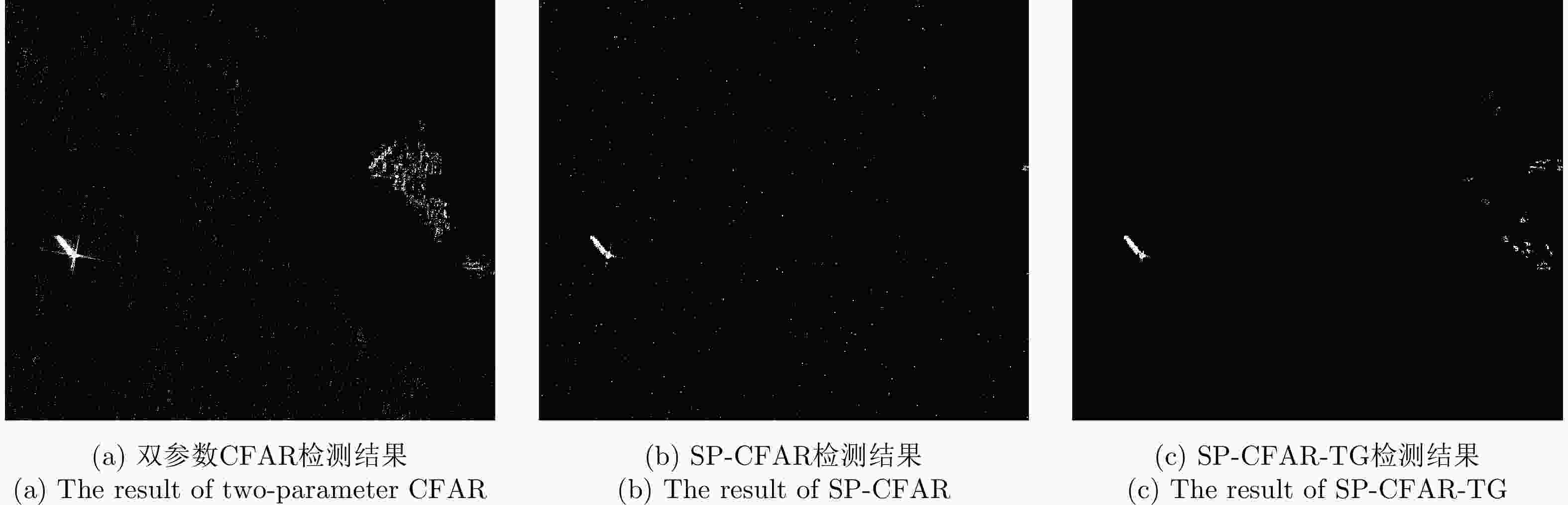
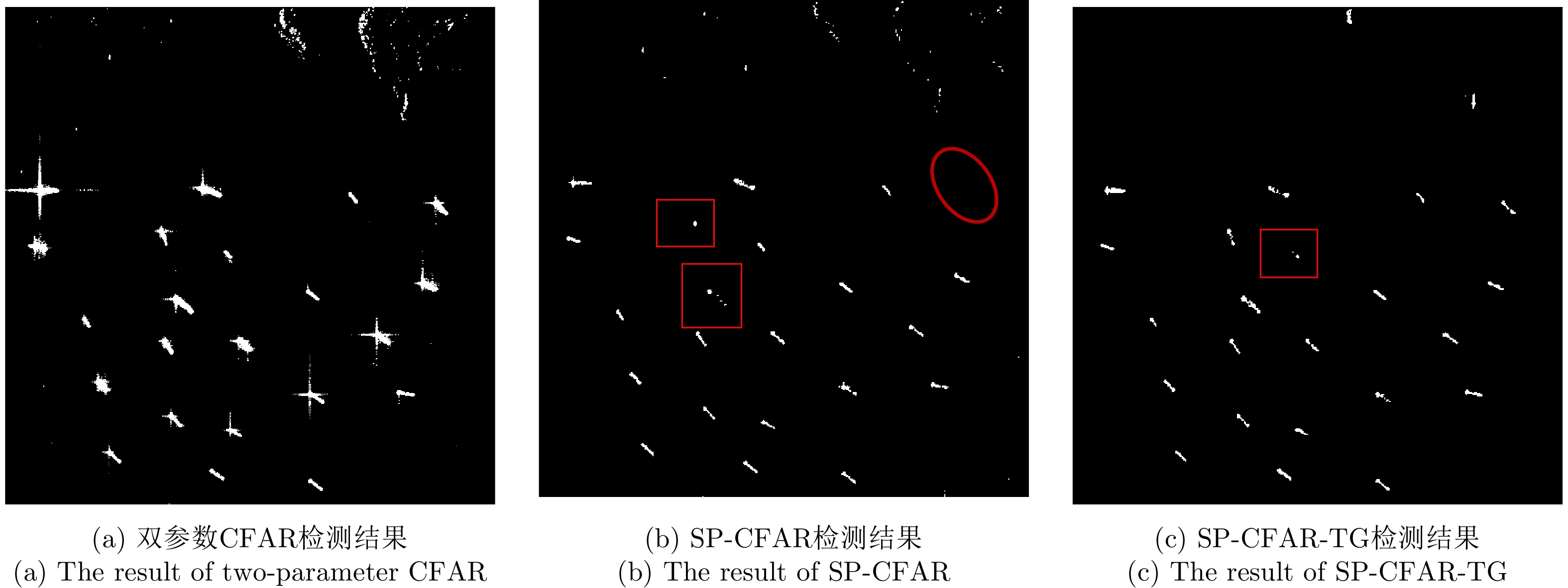
图 16 3种对比方法对GF-3 C波段SAR图像2的检测结果
Figure 16. The detection results of GF-3 C band SAR image 2 with three compared methods
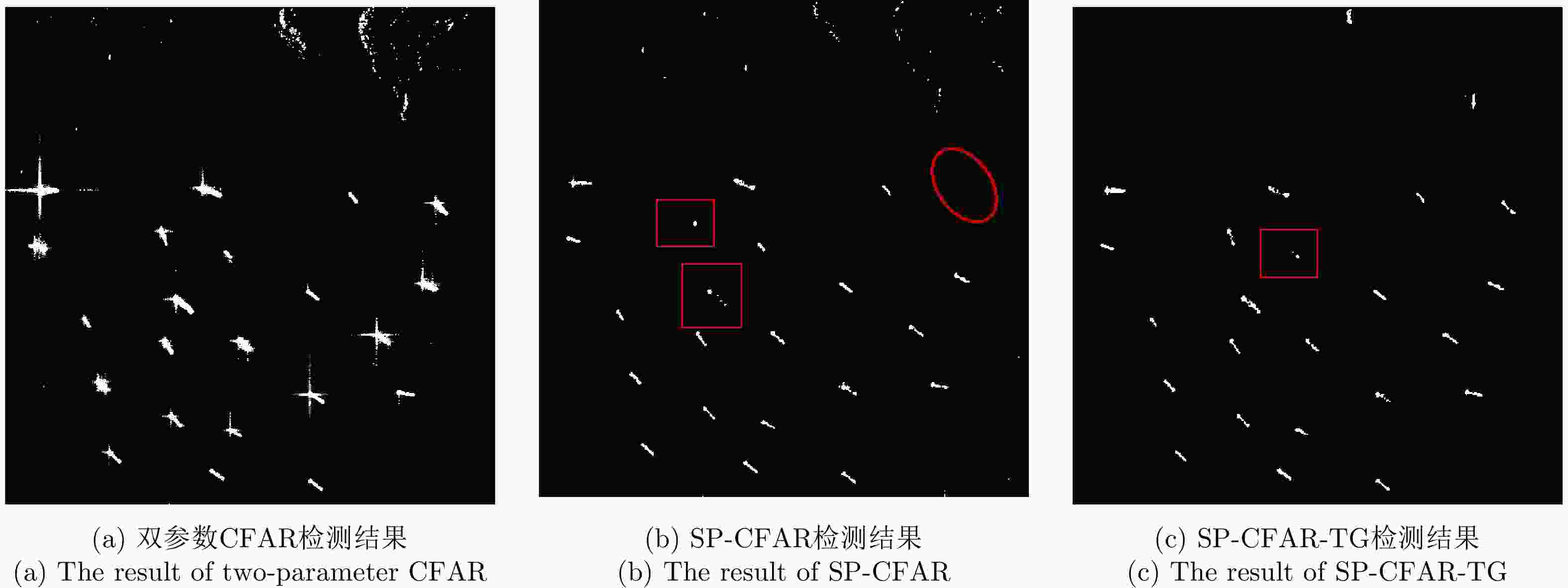
图 17 3种对比方法对Sentinel-1A C波段SAR图像的检测结果
Figure 17. The detection results of Sentinel-1A C band SAR image with three compared methods
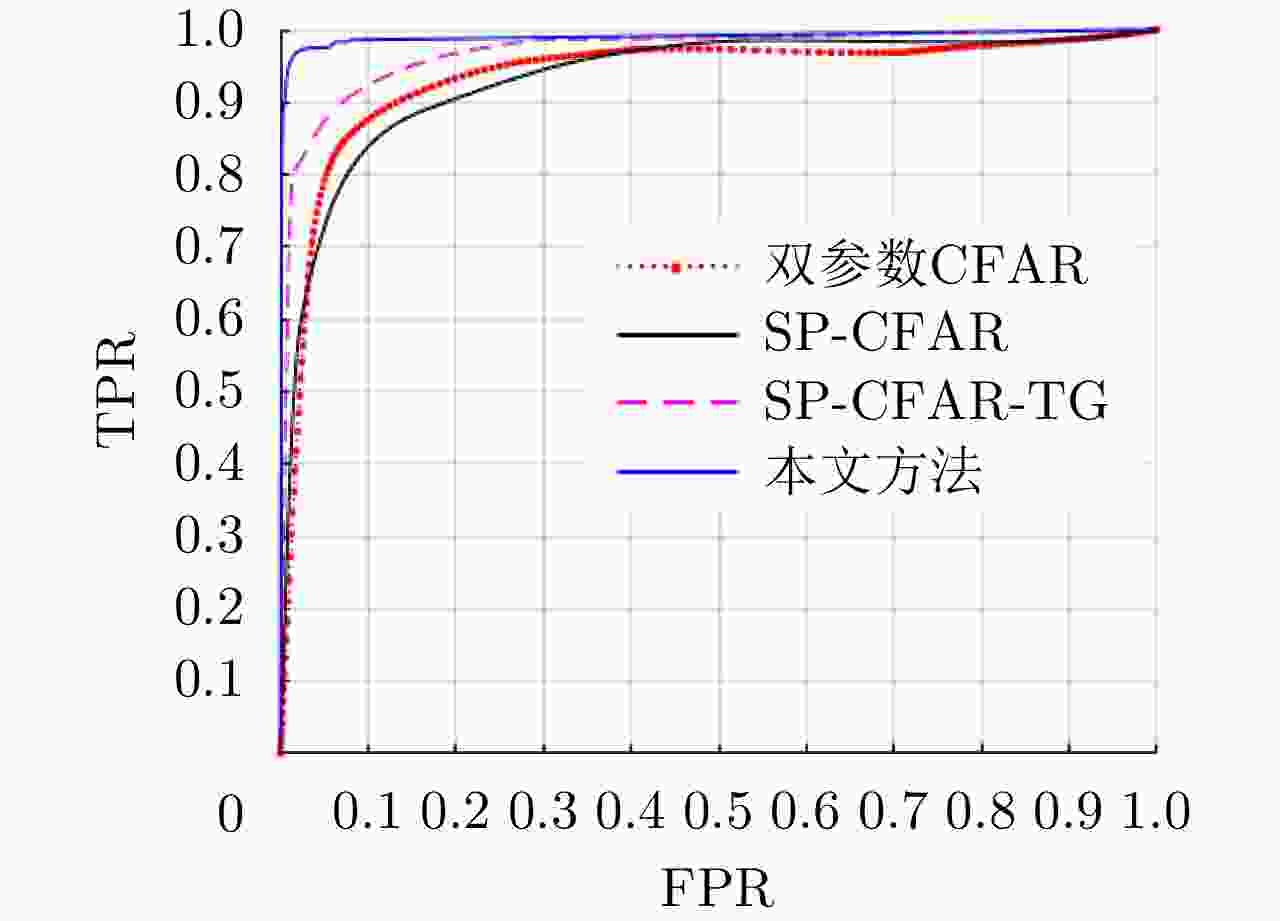
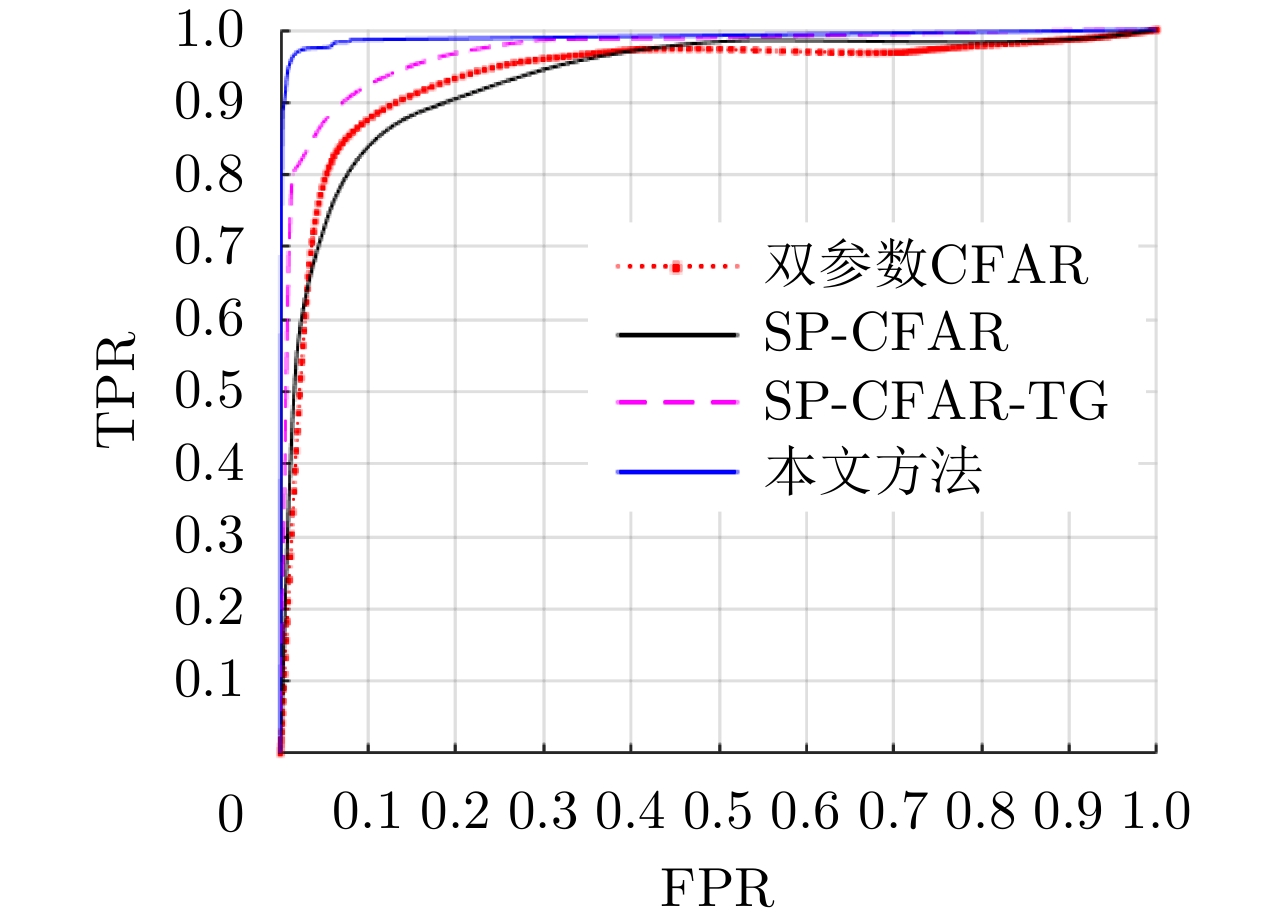
图 18 不同方法对TerraSAR X波段SAR图像1舰船检测的ROC曲线
Figure 18. The ROC curve of ship detection in TerraSAR X band SAR image 1 by different methods

图 17 The detection results of Sentinel-1A C band SAR image with three compared methods

图 18 The ROC curve of ship detection in TerraSAR X band SAR image 1 by different methods
表 1 杂波超像素选取算法
Table 1. The algorithm of clutter superpixels selection
输入:SAR图像全体超像素集Rall,相异性阈值Thclu, Tlclu和Sclutter中超像素数量最大值 输出:每个潜在目标超像素的Sclutter 算法步骤: (1) 根据每个超像素的平均强度值采用K-means聚类算法将Rall分成两个子集Rtarget和Rbackground (2) for Rtarget中每一个潜在目标超像素SPi,do (3) for SPi的每一个邻接超像素${\rm{SP}}_i^k $, ${\rm{SP}}_i^k $∈Rbackground, do (4) 计算超像素相异度 Ω(SPi, ${\rm{SP}}_i^k $) (5) 相异度值大于Thclu的超像素${\rm{SP}}_i^k $被添加进杂波超像素集Sclutter (6) end (7) for Sclutter杂波超像素集中超像素$S_{{\text{clutter}}}^i$的每一个邻接超像素,do (8) 计算$S_{{\text{clutter}}}^i$与每一个邻接超像素的相异度 (9) 相异度值小于Tlclu的邻接超像素被添加进杂波超像素集Sclutter (10) end (11) 重复执行步骤(7)—步骤(10)直到满足Sclutter中超像素数量达到预设的最大值 (12) end  下载: 导出CSV
下载: 导出CSV
表 2 4种目标检测算法性能比较
Table 2. Quantitative comparisons of four target detection algorithms
SAR图像 双参数CFAR SP-CFAR SP-CFAR-TG 本文方法 FPR(%) TPR(%) FPR(%) TPR(%) FPR(%) TPR(%) FPR(%) TPR(%) TerraSAR X波段SAR图像1 3.19 83.41 2.95 23.64 0.54 82.85 0.31 87.93 TerraSAR X波段SAR图像2 2.26 77.23 2.59 69.62 0.98 75.41 0.27 85.57 GF-3 C波段SAR图像1 4.23 99.50 3.76 99.21 0.89 94.95 0.02 96.19 GF-3 C波段SAR图像2 4.61 99.44 0.26 96.25 0.79 95.95 0.02 98.49 Sentinel-1A C波段SAR图像 2.77 98.64 0.85 85.67 0.61 92.48 0.19 97.36
下载: 导出CSV
表 3 本文方法对5幅SAR图像阴影超像素去除前后的检测性能比较
Table 3. Quantitative measures of the proposed method for five SAR images with and without shadow superpixels removal
SAR图像 进行阴影超
像素去除不进行阴影超
像素去除FPR
(%)TPR
(%)FPR
(%)TPR
(%)TerraSAR X波段SAR图像1 0.31 87.93 0.32 86.98 TerraSAR X波段SAR图像2 0.27 85.57 0.27 85.11 GF-3 C波段SAR图像1 0.02 96.19 0.03 95.62 GF-3 C波段SAR图像2 0.02 98.49 0.02 98.25 Sentinel-1A C波段SAR图像 0.19 97.36 0.19 97.36
下载: 导出CSV
表 4 本文方法在不同超像素数量情况下对TerraSARX波段SAR图像1检测性能比较
Table 4. Quantitative measures of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
超像素数量 FPR(%) TPR(%) 3000 0.33 84.36 4000 0.36 86.81 5000 0.31 87.93 6000 0.37 87.88
下载: 导出CSV
表 5 4种目标检测算法时间比较
Table 5. Time costs of four ship detection algorithms
SAR图像 双参数CFAR(s) SP-CFAR(s) SP-CFAR-TG(s) 本文方法(s) TerraSAR X波段SAR图像1 113.41 41.42 18.77 10.86 TerraSAR X波段SAR图像2 1379.21 498.56 86.13 31.75 GF-3 C波段SAR图像1 1428.17 461.73 77.31 29.82 GF-3 C波段SAR图像2 351.12 98.73 43.36 22.93 Sentinel-1A C波段SAR图像 158.35 56.19 30.51 14.31
下载: 导出CSV
表 6 本文方法在不同超像素数量情况下对TerraSAR X波段SAR图像1检测时间比较
Table 6. Time costs of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
超像素数量 时间(s) 3000 8.63 4000 9.15 5000 10.86 6000 14.38
下载: 导出CSV
表 1 The algorithm of clutter superpixels selection
Input:Full set of superpixels R all in the SAR image, Clustering threshold values Th clu, Tl clu, and the maximum number of superpixels
in S clutter.Output: S clutter, the set of clutter superpixels for each potential target superpixel. Algorithm Steps: (1) Based on the average intensity of each superpixel, apply the K-means clustering algorithm to divide R all into two subsets: R target and
R background;(2) For each potential target superpixel SP i in R target, do (3) For each adjacent superpixel ${\rm{SP}}_i^k $ of SP i , where ${\rm{SP}}_i^k $∈ R background , do (4) Calculate the superpixel dissimilarity Ω(SP i , ${\rm{SP}}_i^k $). (5) If the dissimilarity value is greater than Th clu, add ${\rm{SP}}_i^k $ to the clutter superpixel set S clutter. (6) end (7) For Each adjacent superpixel of the superpixel $S_{{\text{clutter}}}^i$ in the clutter superpixel set S clutter, do (8) Calculate the dissimilarity between $S_{{\text{clutter}}}^i$ and each adjacent superpixel (9) If the dissimilarity value is smaller than Tl clu, add the adjacent superpixel to S clutter. (10) end (11) Repeat steps (7) to (10) until the number of superpixels in S clutter reaches the preset maximum value. (12) end
下载: 导出CSV
表 2 Quantitative comparisons of four target detection algorithms
SAR image CFAR SP-CFAR SP-CFAR-TG Our Method FPR(%) TPR(%) FPR(%) TPR(%) FPR(%) TPR(%) FPR(%) TPR(%) TerraSAR X band SAR image 1 3.19 83.41 2.95 23.64 0.54 82.85 0.31 87.93 TerraSAR X band SAR image 2 2.26 77.23 2.59 69.62 0.98 75.41 0.27 85.57 GF-3 C band SAR image 1 4.23 99.50 3.76 99.21 0.89 94.95 0.02 96.19 GF-3 C band SAR image 2 4.61 99.44 0.26 96.25 0.79 95.95 0.02 98.49 Sentinel-1A C band SAR image 2.77 98.64 0.85 85.67 0.61 92.48 0.19 97.36
下载: 导出CSV
表 3 Quantitative measures of the proposed method for the five SAR images with and without shadow superpixels removal
SAR image Shadow superpixel removal No shadow superpixel removal FPR(%) TPR(%) FPR(%) TPR(%) TerraSAR X band SAR image 1 0.31 87.93 0.32 86.98 TerraSAR X band SAR image 2 0.27 85.57 0.27 85.11 GF-3 C band SAR image 1 0.02 96.19 0.02 95.62 GF-3 C band SAR image 2 0.02 98.49 0.02 98.25 Sentinel-1A C band SAR image 0.19 97.36 0.19 97.36
下载: 导出CSV
表 4 Quantitative measures of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
Number of superpixels FPR(%) TPR(%) 3000 0.33 84.36 4000 0.36 86.81 5000 0.31 87.93 6000 0.37 87.88
下载: 导出CSV
表 5 Time costs of four ship detection algorithms
SAR image CFAR (s) SP-CFAR (s) SP-CFAR-TG (s) Our method (s) TerraSAR X band SAR image 1 113.41 41.42 18.77 10.86 TerraSAR X band SAR image 2 1379.21 498.56 86.13 31.75 GF-3 C band SAR image 1 1428.17 461.73 77.31 29.82 GF-3 C band SAR image 2 351.12 98.73 43.36 22.93 Sentinel-1A C band SAR image 158.35 56.19 30.51 14.31
下载: 导出CSV
表 6 Time costs of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
Number of superpixels Time(s) 3000 8.63 4000 9.15 5000 10.86 6000 14.38
下载: 导出CSV
-
[1] 杜兰, 王兆成, 王燕, 等. 复杂场景下单通道SAR目标检测及鉴别研究进展综述[J]. 雷达学报, 2020, 9(1): 34–54. doi: 10.12000/JR19104.DU Lan, WANG Zhaocheng, WANG Yan, et al. Survey of research progress on target detection and discrimination of single-channel SAR images for complex scenes[J]. Journal of Radars, 2020, 9(1): 34–54. doi: 10.12000/JR19104. [2] 马俊虎, 刘长远, 甘露. 基于压缩感知的CFAR目标检测算法[J]. 电子与信息学报, 2017, 39(12): 2899–2904. doi: 10.11999/JEIT170382.MA Junhu, LIU Changyuan, and GAN Lu. CFAR target detection algorithm based on compressive sensing[J]. Journal of Electronics &Information Technology, 2017, 39(12): 2899–2904. doi: 10.11999/JEIT170382. [3] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084.XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084. [4] 李春升, 于泽, 陈杰. 高分辨率星载SAR成像与图像质量提升方法综述[J]. 雷达学报, 2019, 8(6): 717–731. doi: 10.12000/JR19085.LI Chunsheng, YU Ze, and CHEN Jie. Overview of techniques for improving high-resolution spaceborne SAR imaging and image quality[J]. Journal of Radars, 2019, 8(6): 717–731. doi: 10.12000/JR19085. [5] 房明星, 毕大平, 沈爱国, 等. 对SAR图像恒虚警检测的多假目标干扰研究[J]. 电子与信息学报, 2017, 39(4): 973–980. doi: 10.11999/JEIT160633.FANG Mingxing, BI Daping, SHEN Aiguo, et al. Jamming technique of multiple false targets against CFAR detection in SAR images[J]. Journal of Electronics &Information Technology, 2017, 39(4): 973–980. doi: 10.11999/JEIT160633. [6] 黄寅礼, 孙路, 郭亮, 等. 基于空间变迹滤波旁瓣抑制与有序统计恒虚警率的舰船检测算法[J]. 雷达学报, 2020, 9(2): 335–342. doi: 10.12000/JR19082.HUANG Yinli, SUN Lu, GUO Liang, et al. Ship detection algorithm based on spatially variant apodization sidelobe suppression and order statistic-constant false alarm rate[J]. Journal of Radars, 2020, 9(2): 335–342. doi: 10.12000/JR19082. [7] SCHWEGMANN C P, KLEYNHANS W, and SALMON B P. Manifold adaptation for constant false alarm rate ship detection in south african oceans[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(7): 3329–3337. doi: 10.1109/JSTARS.2015.2417756. [8] QIN Xianxiang, ZHOU Shilin, ZOU Huanxin, et al. A CFAR detection algorithm for generalized Gamma distributed background in high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(4): 806–810. doi: 10.1109/LGRS.2012.2224317. [9] 朱洁丽, 汤俊. 基于改进的ZMNL和SIRP的K分布杂波模拟方法[J]. 雷达学报, 2014, 3(5): 533–540. doi: 10.3724/SP.J.1300.2014.13124.ZHU Jieli and TANG Jun. K-distribution clutter simulation methods based on improved ZMNL and SIRP[J]. Journal of Radars, 2014, 3(5): 533–540. doi: 10.3724/SP.J.1300.2014.13124. [10] SHAN Zili, WANG Chao, ZHANG Hong, et al. Change detection in urban areas with high resolution SAR images using second kind statistics based G0 distribution[C]. 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, USA, 2010: 4600–4603. [11] 孙显, 王智睿, 孙元睿, 等. AIR-SARShip-1.0: 高分辨率SAR舰船检测数据集[J]. 雷达学报, 2019, 8(6): 852–862. doi: 10.12000/JR19097.SUN Xian, WANG Zhirui, SUN Yuanrui, et al. AIR-SARShip-1.0: High-resolution SAR ship detection dataset[J]. Journal of Radars, 2019, 8(6): 852–862. doi: 10.12000/JR19097. [12] LI Dong, LIANG Quanhuan, LIU Hongqing, et al. A novel multidimensional domain deep learning network for SAR ship detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5203213. doi: 10.1109/TGRS.2021.3062038. [13] 张晓玲, 张天文, 师君, 等. 基于深度分离卷积神经网络的高速高精度SAR舰船检测[J]. 雷达学报, 2019, 8(6): 841–851. doi: 10.12000/JR19111.ZHANG Xiaoling, ZHANG Tianwen, SHI Jun, et al. High-speed and high-accurate SAR ship detection based on a depthwise separable convolution neural network[J]. Journal of Radars, 2019, 8(6): 841–851. doi: 10.12000/JR19111. [14] WU Zitong, HOU Biao, REN Bo, et al. A deep detection network based on interaction of instance segmentation and object detection for SAR images[J]. Remote Sensing, 2021, 13(13): 2582. doi: 10.3390/rs13132582. [15] SUN Yuanrui, SUN Xian, WANG Zhirui, et al. Oriented ship detection based on strong scattering points network in large-scale SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5218018. doi: 10.1109/TGRS.2021.3130117. [16] CUI Yi, ZHOU Guangyi, YANG Jian, et al. On the iterative censoring for target detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 641–645. doi: 10.1109/LGRS.2010.2098434. [17] AN Wentao, XIE Chunhua, and YUAN Xinzhe. An improved iterative censoring scheme for CFAR ship detection with SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4585–4595. doi: 10.1109/TGRS.2013.2282820. [18] GAO Gui, LIU Li, ZHAO Lingjun, et al. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(6): 1685–1697. doi: 10.1109/TGRS.2008.2006504. [19] HOU Biao, CHEN Xingzhong, and JIAO Licheng. Multilayer CFAR detection of ship targets in very high resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(4): 811–815. doi: 10.1109/LGRS.2014.2362955. [20] LENG Xiangguang, JI Kefeng, YANG Kai, et al. A bilateral CFAR algorithm for ship detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(7): 1536–1540. doi: 10.1109/LGRS.2015.2412174. [21] 艾加秋, 曹振翔, 毛宇翔, 等. 一种复杂环境下改进的SAR图像双边CFAR舰船检测算法[J]. 雷达学报, 2021, 10(4): 499–515. doi: 10.12000/JR20127.AI Jiaqiu, CAO Zhenxiang, MAO Yuxiang, et al. An improved bilateral CFAR ship detection algorithm for SAR image in complex environment[J]. Journal of Radars, 2021, 10(4): 499–515. doi: 10.12000/JR20127. [22] WANG Zhaocheng, DU Lan, and SU Hongtao. Target detection via Bayesian-morphological saliency in high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(10): 5455–5466. doi: 10.1109/TGRS.2017.2707672. [23] JIA Sen, DENG Xianglong, XU Meng, et al. Superpixel-level weighted label propagation for hyperspectral image classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(7): 5077–5091. doi: 10.1109/TGRS.2020.2972294. [24] HE Jinglu, WANG Yinghua, LIU Hongwei, et al. A novel automatic PolSAR ship detection method based on superpixel-level local information measurement[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(3): 384–388. doi: 10.1109/LGRS.2017.2789204. [25] 崔兴超, 粟毅, 陈思伟. 融合极化旋转域特征和超像素技术的极化SAR舰船检测[J]. 雷达学报, 2021, 10(1): 35–48. doi: 10.12000/JR20147.CUI Xingchao, SU Yi, and CHEN Siwei. Polarimetric SAR ship detection based on polarimetric rotation domain features and superpixel technique[J]. Journal of Radars, 2021, 10(1): 35–48. doi: 10.12000/JR20147. [26] 聂茜茜, 肖斌, 毕秀丽, 等. 基于超像素级卷积神经网络的多聚焦图像融合算法[J]. 电子与信息学报, 2021, 43(4): 965–973. doi: 10.11999/JEIT191053.NIE Xixi, XIAO Bin, BI Xiuli, et al. Multi-focus image fusion algorithm based on super pixel level convolutional neural network[J]. Journal of Electronics &Information Technology, 2021, 43(4): 965–973. doi: 10.11999/JEIT191053. [27] ACHANTA R, SHAJI A, SMITH K, et al. SLIC superpixels compared to state-of-the-art superpixel methods[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11): 2274–2282. doi: 10.1109/TPAMI.2012.120. [28] XIANG Deliang, TANG Tao, ZHAO Lingjun, et al. Superpixel generating algorithm based on pixel intensity and location similarity for SAR image classification[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(6): 1414–1418. doi: 10.1109/LGRS.2013.2259214. [29] JING Wenbo, JIN Tian, and XIANG Deliang. Content-sensitive superpixel generation for SAR images with edge penalty and contraction-expansion search strategy[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5210715. doi: 10.1109/TGRS.2021.3077407. [30] JING Wenbo, JIN Tian, and XIANG Deliang. Edge-aware superpixel generation for SAR imagery with one iteration merging[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(9): 1600–1604. doi: 10.1109/LGRS.2020.3005973. [31] XIANG Deliang, TANG Tao, QUAN Sinong, et al. Adaptive superpixel generation for SAR images with linear feature clustering and edge constraint[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(6): 3873–3889. doi: 10.1109/TGRS.2018.2888891. [32] CUI Zongyong, HOU Zesheng, YANG Hongzhi, et al. A CFAR target-detection method based on superpixel statistical modeling[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(9): 1605–1609. doi: 10.1109/LGRS.2020.3006033. [33] YU Wenyi, WANG Yinghua, LIU Hongwei, et al. Superpixel-based CFAR target detection for high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(5): 730–734. doi: 10.1109/LGRS.2016.2540809. [34] PAPPAS O, ACHIM A, and BULL D. Superpixel-level CFAR detectors for ship detection in SAR imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(9): 1397–1401. doi: 10.1109/LGRS.2018.2838263. [35] LI Tao, LIU Zheng, XIE Rong, et al. An improved superpixel-level CFAR detection method for ship targets in high-resolution SAR images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(1): 184–194. doi: 10.1109/JSTARS.2017.2764506. [36] LIU Ming, CHEN Shichao, LU Fugang, et al. Realizing target detection in SAR images based on multiscale superpixel fusion[J]. Sensors, 2021, 21(5): 1643. doi: 10.3390/s21051643. [37] LI Mingdian, CUI Xingchao, and CHEN Siwei. Adaptive superpixel-level CFAR detector for SAR inshore dense ship detection[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4010405. doi: 10.1109/LGRS.2021.3059253. [38] LI Tao, PENG Dongliang, CHEN Zhikun, et al. Superpixel-level CFAR detector based on truncated gamma distribution for SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(8): 1421–1425. doi: 10.1109/LGRS.2020.3003659. [39] ZHANG Liang, LU Shengtao, HU Canbin, et al. Superpixel generation for SAR imagery based on fast DBSCAN clustering with edge penalty[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 804–819. doi: 10.1109/JSTARS.2021.3131187. [40] KURUOGLU E E and ZERUBIA J. Modelling SAR images with a generalisation of the Rayleigh distribution[C]. Conference Record of the Thirty-Fourth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, USA, 2000: 224–228. [41] LI Hengchao, KRYLOV V A, FAN Pingzhi, et al. Unsupervised learning of generalized gamma mixture model with application in statistical modeling of high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(4): 2153–2170. doi: 10.1109/TGRS.2015.2496348. [42] NAR F, OKMAN O E, ÖZGÜR A, et al. Fast target detection in radar images using Rayleigh mixtures and summed area tables[J]. Digital Signal Processing, 2018, 77: 86–101. doi: 10.1016/j.dsp.2017.09.015. -
















计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

