
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
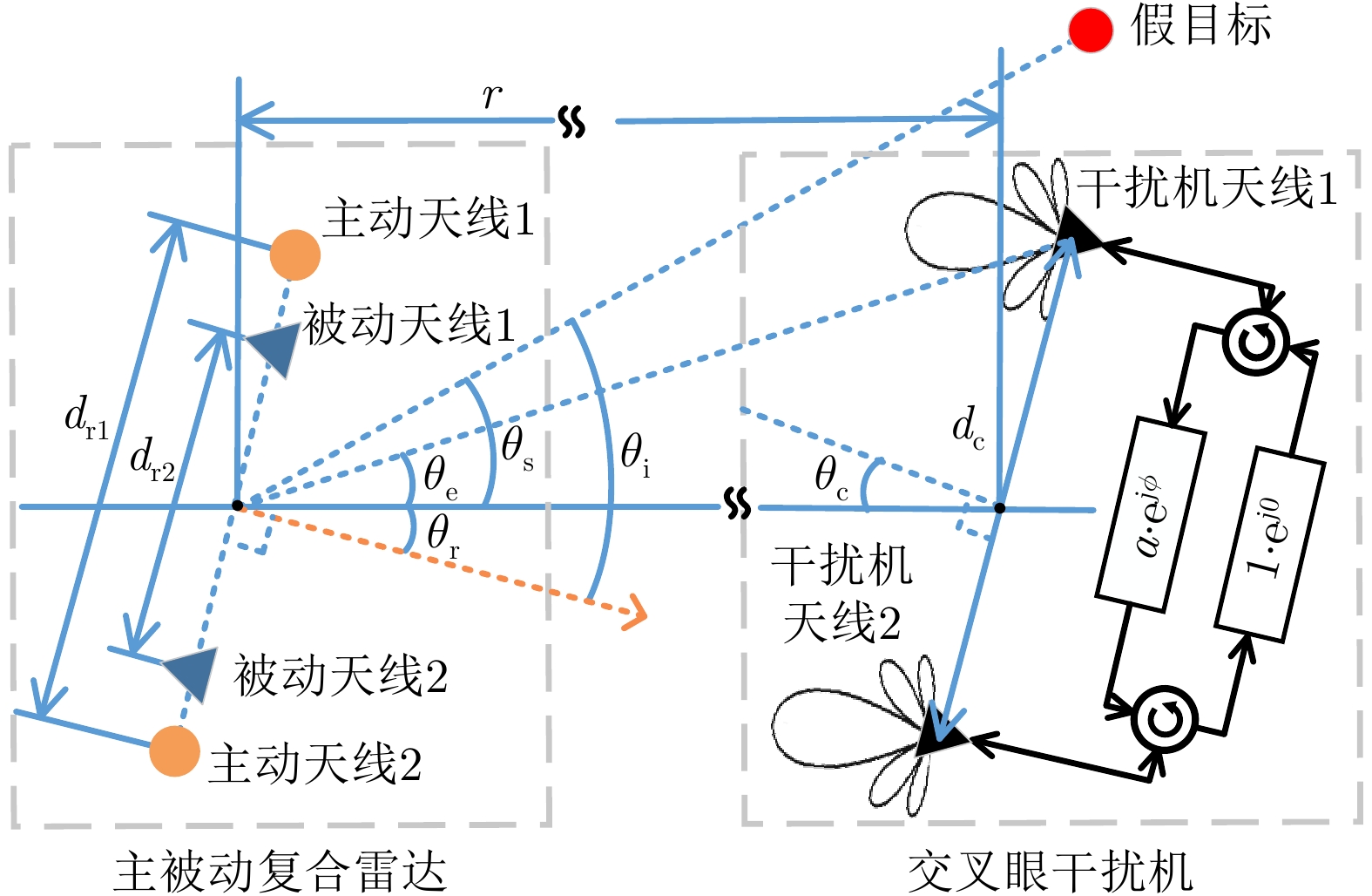
摘要: 交叉眼技术是一种通过相干多点辐射源诱使单脉冲雷达测角偏差的电子对抗技术。面对攻防双方激烈对抗的复杂电磁环境,采用主被动复合单脉冲雷达测角是现代末制导雷达提高抗干扰能力的发展趋势之一。该文以主被动复合单脉冲雷达为干扰对象,建立了交叉眼干扰数学模型,通过对比交叉眼技术对抗主动单脉冲测角和被动单脉冲测角的干扰效果,揭示了交叉眼技术对主被动复合单脉冲雷达的影响机理。该研究成果可为干扰与抗干扰的合理应用提供理论规律和仿真数据。Abstract: Cross-eye jamming is an electronic countermeasure technology used to cause angular deviation of monopulse radar via multiple coherent sources. Despite a complex electromagnetic environment, using active-passive composite monopulse radar is a development trend for improving the anti-interference ability of modern terminal guidance radar. A mathematical model of cross-eye jamming considering the active-passive composite monopulse radar is established. The influence mechanism of cross-eye jamming on the active-passive composite monopulse radar is revealed by comparing the effect of active and passive monopulse radar systems on angle measurement. Furthermore, the results can provide theoretical guidance and simulation data to reasonably apply Electronic Countermeasures (ECMs) and Electronic Counter-Countermeasures (ECCMs).
-

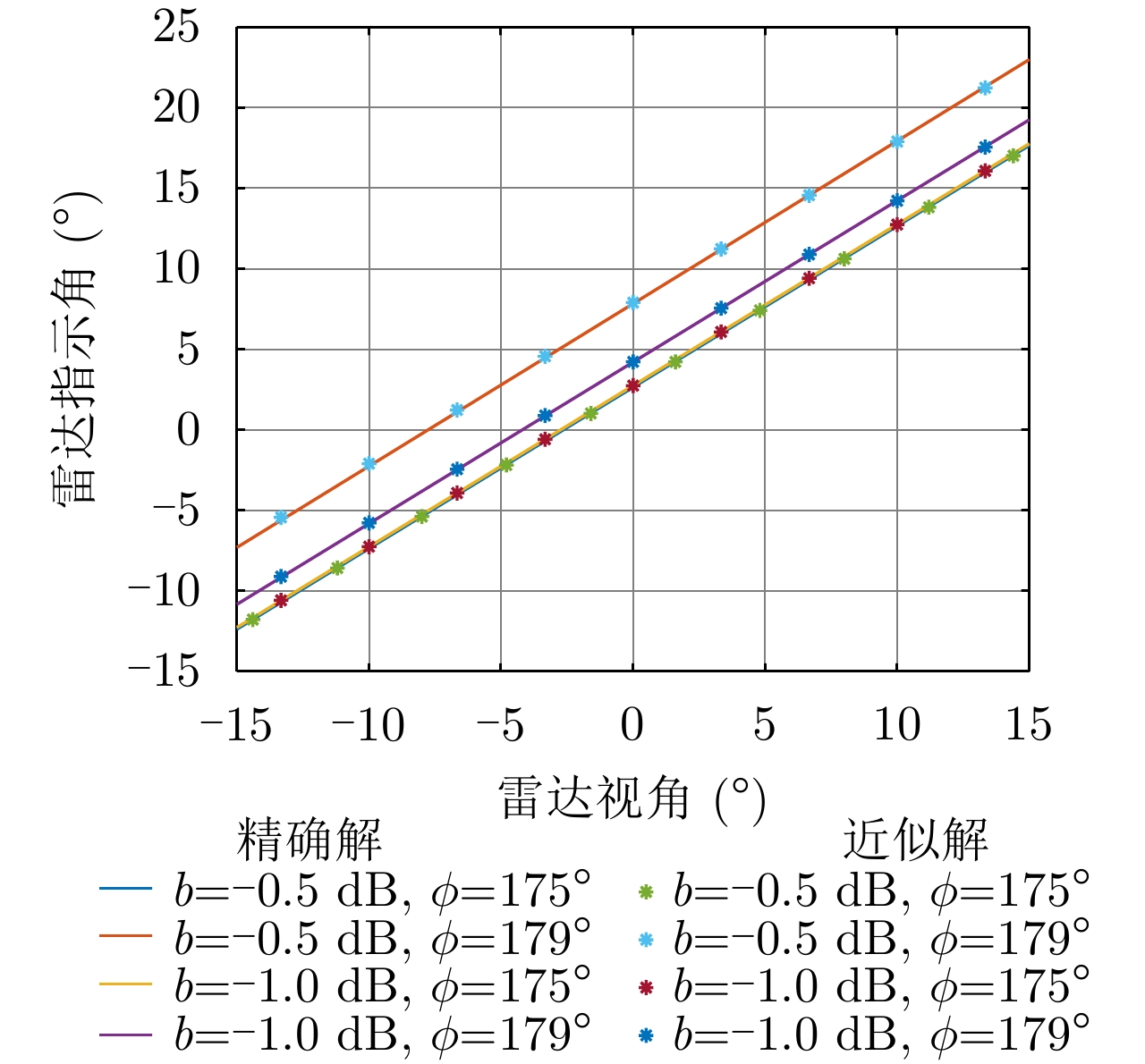
图 3 被动雷达指示角
${\theta _{\text{i}}}$ 的近似解验证Figure 3. Verification of approximate solution of
${\theta _{\text{i}}}$ for passive radar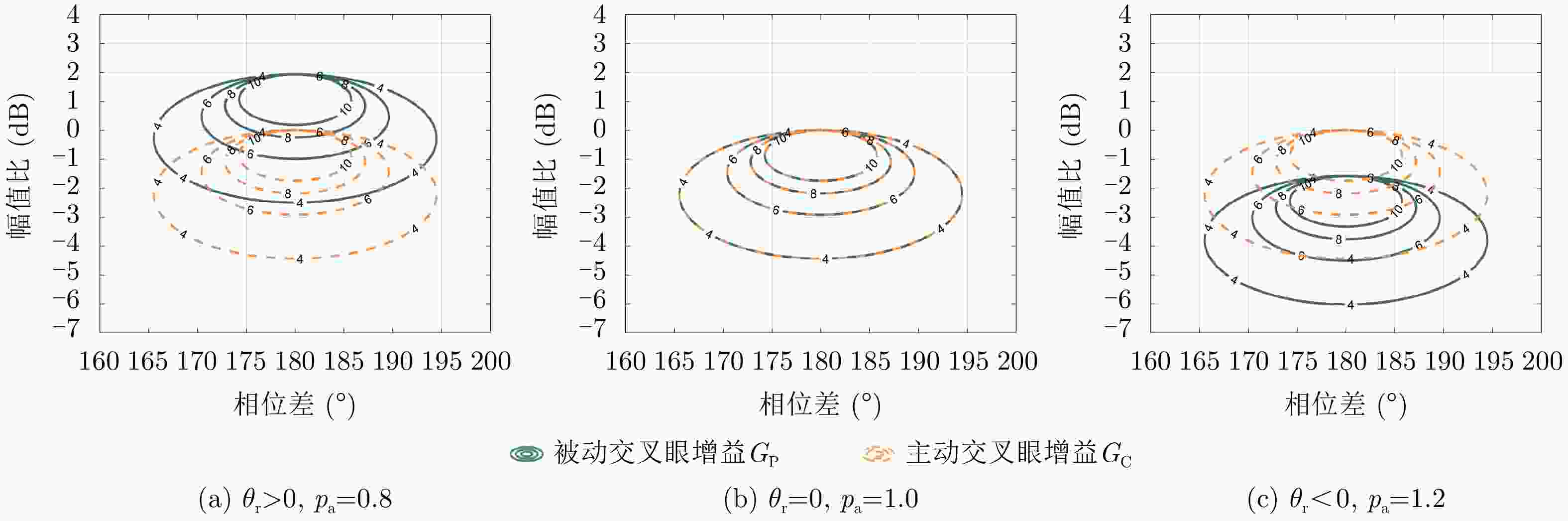
图 4 不同雷达视角
$ {\theta _{\text{r}}} $ 下的交叉眼增益等高线Figure 4. Contours of cross-eye gain at different
$ {\theta _{\text{r}}} $ 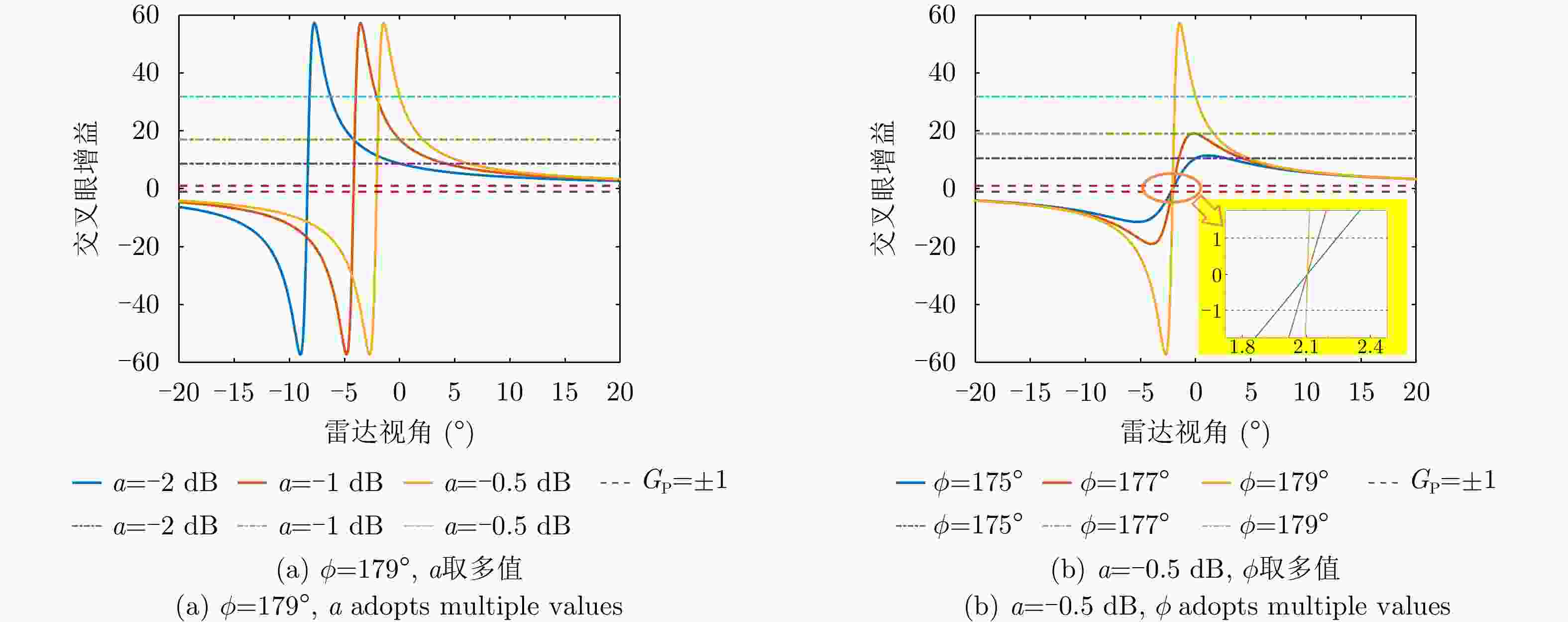
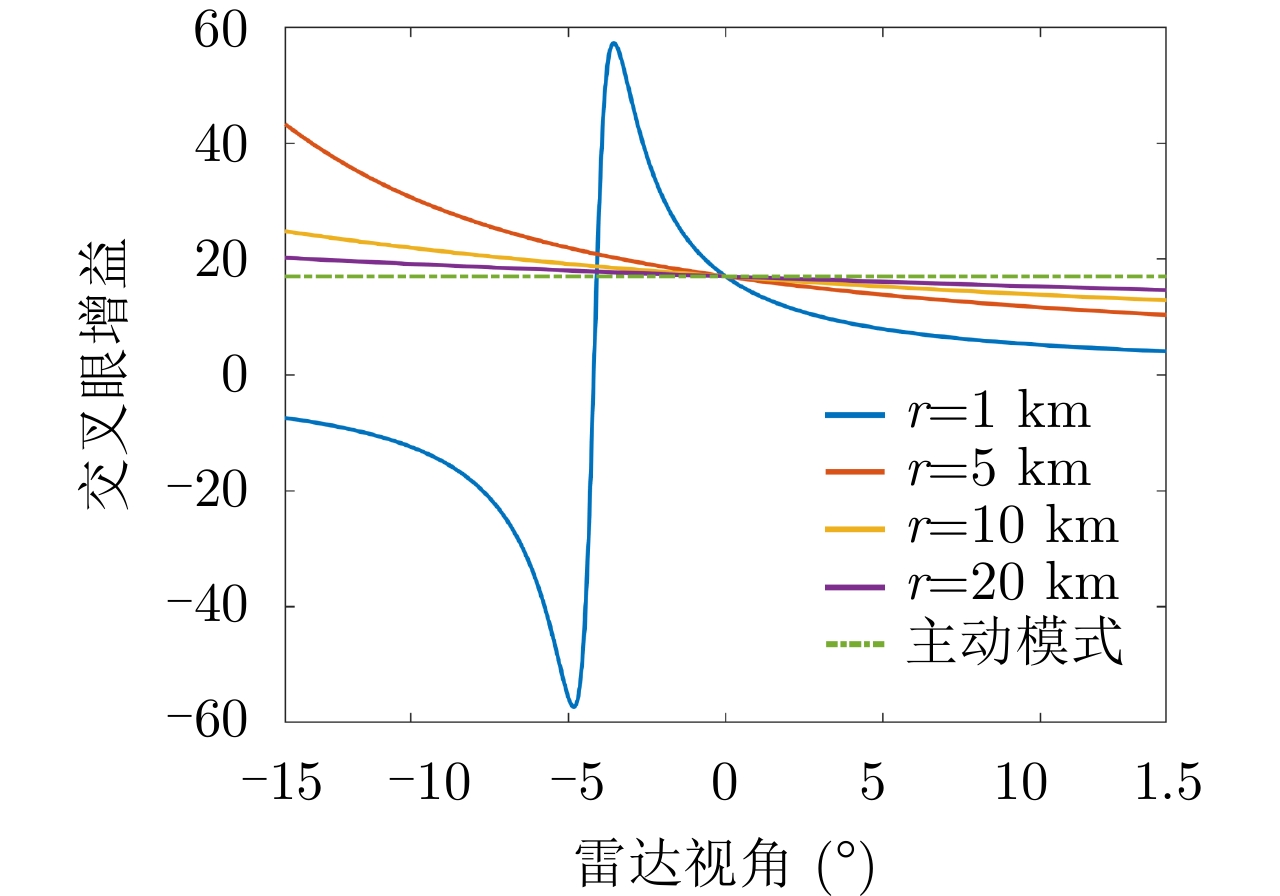
图 5 交叉眼增益随雷达视角
$ {\theta _{\text{r}}} $ 变化Figure 5. Variation of cross-eye gain with
$ {\theta _{\text{r}}} $ -
[1] LEE S H, LEE S J, CHOI I O, et al. ICA-based phase-comparison monopulse technique for accurate Angle estimation of multiple targets[J]. IET Radar, Sonar & Navigation, 2018, 12(3): 323–331. doi: 10.1049/iet-rsn.2017.0156 [2] SHERMAN S M and BARTON D K. Monopulse Principles and Techniques[M]. Boston, London: Artech House Publishers, 2011: 1–13. [3] 刘天鹏, 魏玺章, 刘振, 等. 交叉眼干扰研究综述[J]. 雷达学报, 2019, 8(1): 140–153. doi: 10.12000/JR19013LIU Tianpeng, WEI Xizhang, LIU Zhen, et al. Overview of cross-eye jamming research[J]. Journal of Radars, 2019, 8(1): 140–153. doi: 10.12000/JR19013 [4] FALK L. Cross-eye jamming of monopulse radar[C]. International Waveform Diversity and Design Conference, Pisa, Italy, 2007: 209–213. [5] NERI F. Anti-monopulse jamming techniques[C]. 2001 SBMO/IEEE MTT-S International Microwave and Optoelectronics Conference, Belem, Brazil, 2001: 45–50. [6] NERI F. Introduction to Electronic Defense Systems[M]. Boston, London: Artech House, 2006: 373–487. [7] 刘天鹏. 多源反向交叉眼干扰技术研究[D]. [博士论文], 国防科技大学, 2016: 34–38.LIU Tianpeng. Research on multiple-element retrodirective cross-eye jamming[D]. [Ph. D. dissertation], National University of Defense Technology, 2016: 34–38. [8] LIU Tianpeng, LIAO Dongping, WEI Xizhang, et al. Performance analysis of multiple-element retrodirective cross-eye jamming based on linear array[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1867–1876. doi: 10.1109/TAES.2015.140035 [9] LIU Songyang, DONG Chunxi, XU Jin, et al. Analysis of rotating cross-eye jamming[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14: 939–942. doi: 10.1109/LAWP.2014.2387423 [10] STRATAKOS Y, GEROULIS G, and UZUNOGLU N. Analysis of glint phenomenon in a monopulse radar in the presence of skin echo and non-ideal interferometer echo signals[J]. Journal of Electromagnetic Waves and Applications, 2005, 19(5): 697–711. doi: 10.1163/1569393053305008 [11] DUNN J H, HOWARD D D, and KING A M. Phenomena of scintillation noise in radar-tracking systems[J]. Proceedings of the IRE, 1959, 47(5): 855–863. doi: 10.1109/JRPROC.1959.287280 [12] SHERMAN S M. Complex indicated angles applied to unresolved radar targets and multipath[J]. IEEE Transactions on Aerospace and Electronic Systems, 1971, AES-7(1): 160–170. doi: 10.1109/TAES.1971.310264 [13] DU PLESSIS W P. A comprehensive investigation of retrodirective cross-eye jamming[D]. [Ph. D. dissertation], University of Pretoria, 2010: 20–95. [14] DU PLESSIS W P, ODENDAAL J W, and JOUBERT J. Experimental simulation of retrodirective cross-eye jamming[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 734–740. doi: 10.1109/TAES.2011.5705704 [15] DU PLESSIS W P, ODENDAAL J W, and JOUBERT J. Tolerance analysis of cross-eye jamming systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 740–745. doi: 10.1109/TAES.2011.5705705 [16] 刘松杨, 董春曦, 董阳阳, 等. 旋转的正交多点源反向交叉眼干扰分析[J]. 电子与信息学报, 2016, 38(6): 1424–1430. doi: 10.11999/JEIT150919LIU Songyang, DONG Chunxi, DONG Yangyang, et al. Analysis of rotating orthogonal multiple elements retrodirective cross-eye jamming[J]. Journal of Electronics & Information Technology, 2016, 38(6): 1424–1430. doi: 10.11999/JEIT150919 [17] PLESSIS W P D, ODENDAAL J W, and JOUBERT J. Extended analysis of retrodirective cross-eye jamming[J]. IEEE Transactions on Antennas and Propagation, 2009, 57(9): 2803–2806. doi: 10.1109/TAP.2009.2027353 [18] DU PLESSIS W P. Platform skin return and retrodirective cross-eye jamming[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 490–501. doi: 10.1109/TAES.2012.6129650 [19] 曲志昱, 司锡才, 谢纪岭. 相干源诱偏下比相被动雷达导引头测角性能分析[J]. 系统工程与电子技术, 2008, 30(5): 824–827. doi: 10.3321/j.issn:1001-506X.2008.05.012QU Zhiyu, SI Xicai, and XIE Jiling. Analysis of phase-comparison passive-radar-seeker angle measurement with decoy of coherent source[J]. Systems Engineering and Electronics, 2008, 30(5): 824–827. doi: 10.3321/j.issn:1001-506X.2008.05.012 [20] 高烽. 雷达导引头概论[M]. 北京: 电子工业出版社, 2010: 303–323.GAO Feng. Introduction to Radar Seeker[M]. Beijing: Publishing House of Electronics Industry, 2010: 303–323. [21] 王卫, 陆伟宁, 唐莽, 等. 主被动复合体制反舰导弹导引头干扰技术研究[J]. 航天电子对抗, 2020, 36(6): 18–22. doi: 10.16328/j.htdz8511.2020.06.004WANG Wei, LU Weining, TANG Mang, et al. Jamming technology for the active-passive anti-ship missile seeker[J]. Aerospace Electronic Warfare, 2020, 36(6): 18–22. doi: 10.16328/j.htdz8511.2020.06.004 [22] 李相平, 李世忠, 张刚, 等. 反舰导弹毫米波主被动复合制导导引头设计探讨[J]. 现代电子技术, 2008, 31(3): 43–45. doi: 10.3969/j.issn.1004-373X.2008.03.014LI Xiangping, LI Shizhong, ZHANG Gang, et al. Passive compound guidance detection unit design study of certain mould air to ship missile seeker[J]. Modern Electronics Technique, 2008, 31(3): 43–45. doi: 10.3969/j.issn.1004-373X.2008.03.014 [23] 陈涛, 郭立民, 潘大鹏, 等. 被动雷达宽带数字接收机技术[M]. 北京: 电子工业出版社, 2021: 117–128.CHEN Tao, GUO Limin, PAN Dapeng, et al. Passive Radar Broadband Digital Receiver Technology[M]. Beijing: Publishing House of Electronics Industry, 2021: 117–128. -

 下载:
下载:











图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

