
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 针对合成孔径雷达(SAR)舰船斜框检测数据集较少,难以满足算法发展和实际应用需求的问题,该文公开了SAR舰船斜框检测数据集(RSDD-SAR),该数据集由84景高分3号数据和41景TerraSAR-X数据切片及2景未剪裁大图,共127景数据构成,包含多种成像模式、多种极化方式、多种分辨率切片7000张,舰船实例10263个,通过自动标注和人工修正相结合的方式高效标注。同时,该文对几种常用的光学遥感图像斜框检测算法和SAR舰船斜框检测算法进行了实验,其中单阶段算法S2ANet检测效果最佳,平均精度达到90.06%。通过实验对比分析形成基准指标,可供相关学者参考。最后,该文通过泛化能力测试,分析讨论了RSDD-SAR数据集训练模型在其他数据集和未剪裁大图上的性能,结果表明:该数据集训练模型具有较好的泛化能力,说明该数据集具有较强的应用价值。RSDD-SAR数据集可在以下网址下载:
https://radars.ac.cn/web/data/getData?dataType=SDD-SAR 。-
关键词:
- 合成孔径雷达 /
- 舰船斜框检测 /
- 公开数据集 /
- SAR舰船斜框检测数据集 /
- 深度学习
Abstract: This paper releases a rotated SAR ship detection dataset, named Rotated Ship Detection Dataset in SAR Images (RSDD-SAR), to address the problem that the existing rotated SAR ship detection datasets are not enough to meet the requirements of algorithm development and practical application. This dataset consists of 84 scenes of GF-3 data slices, 41 scenes of TerraSAR-X data slices, and 2 scenes of large uncropped images, including 7,000 slices and 10,263 ship instances of multi-observing modes, multi-polarization modes, and multi-resolutions. This dataset is effectively annotated by automatic annotation with manual correction. Meanwhile, experiments were conducted for several popular rotated object detection algorithms in optical remote sensing images and rotated ship detection algorithms in SAR images, and the one-stage algorithm S2ANet achieved the highest average precision of 90.06%. When using this dataset, scholars can reference the experimental results, and corresponding analysis can be used. Finally, this paper conducts generalization ability testing experiments on other datasets and large uncropped images to analyze and discuss the performance of the model trained on RSDD-SAR. The experimental results show that the model trained on RSDD-SAR has decent performance and confirms the application value of this dataset. The RSDD-SAR dataset is available athttps://radars.ac.cn/web/data/getData?dataType=SDD-SAR .-
Key words:
- Synthetic Aperture Radar (SAR) /
- Rotated SAR ship detection /
- Public dataset /
- RSDD-SAR /
- Deep learning
-
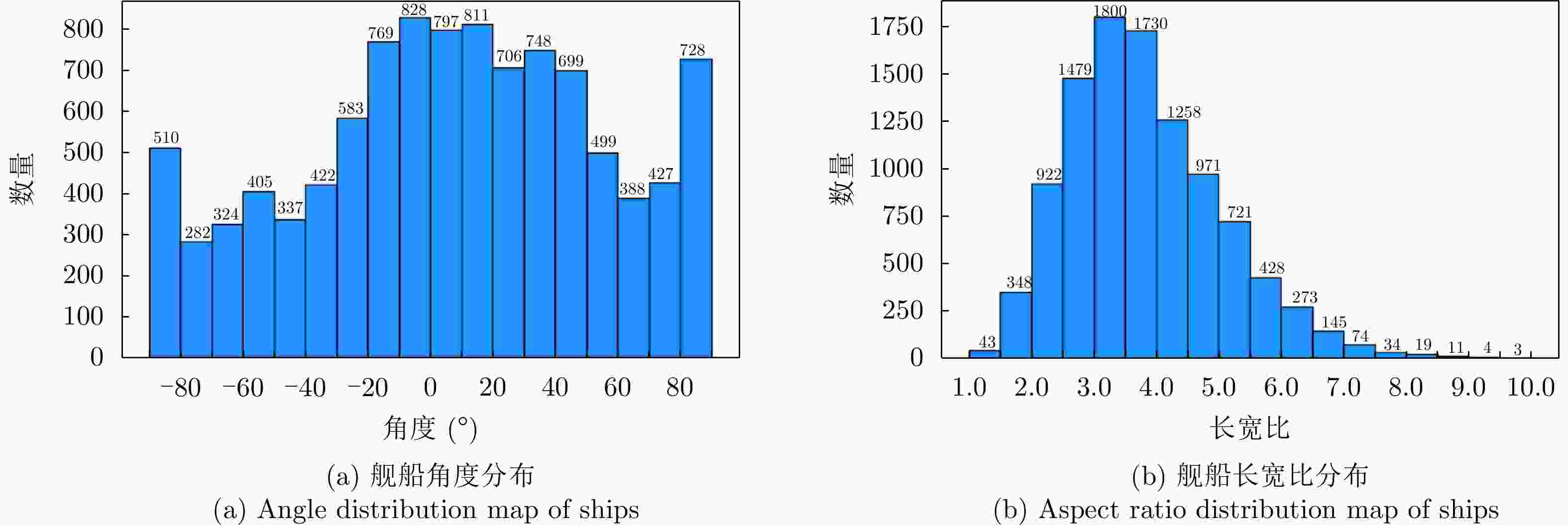
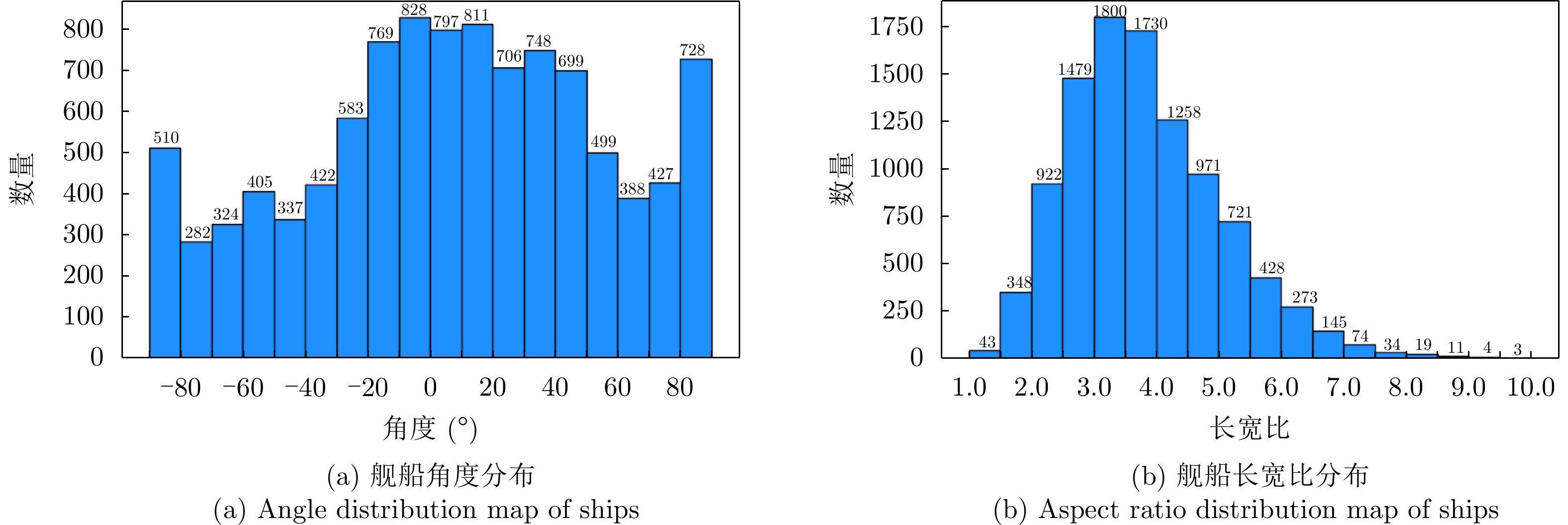
图 11 数据集舰船角度和长宽比分布图
Figure 11. Angle and aspect ratio distribution maps of ships in RSDD-SAR dataset
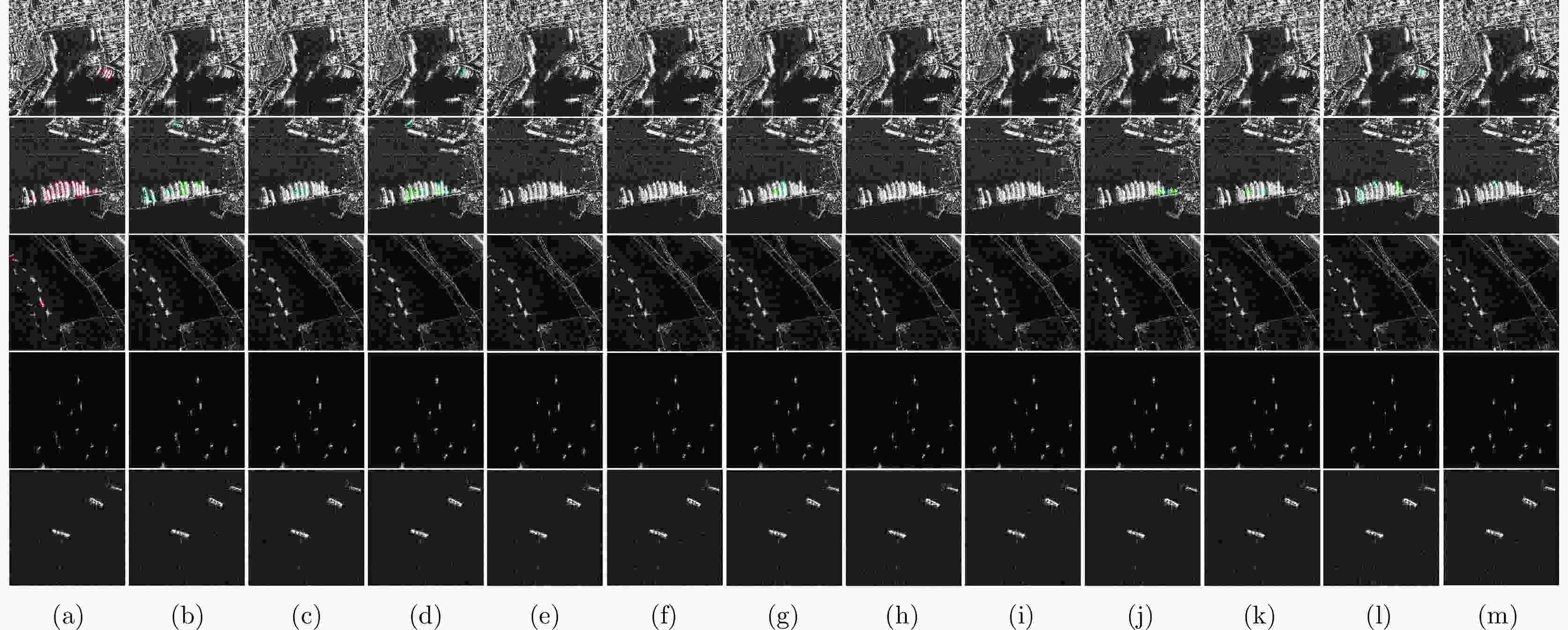
图 13 不同算法检测结果((a) 标注;(b) R-Faster R-CNN-ResNet-101检测结果;(c) RoI Transformer-ResNet-101检测结果;(d) Gliding Vertex-ResNet-101检测结果;(e) Oriented R-CNN-ResNet-101检测结果;(f) R-RetinaNet-ResNet-101检测结果;(g) S2ANet-ResNet-101检测结果;(h) R3Det-ResNet-101检测结果;(i) Redet-ReResNet-50检测结果;(j) DRBox-V2检测结果;(k) R-FCOS-ResNet-101检测结果;(l) CAF-ResNet-101检测结果;(m) Polar Encoding-ResNet-101检测结果)
Figure 13. Detection results of different methods ((a) Annotations; (b) Detection results of R-Faster R-CNN-ResNet-101; (c) Detection results of RoI Transformer-ResNet-101; (d) Detection results of Gliding Vertex-ResNet-101; (e) Detection results of Oriented R-CNN-ResNet-101; (f) Detection results of R-RetinaNet-ResNet-101; (g) Detection results of S2ANet-ResNet-101; (h) Detection results of R3Det-ResNet-101; (i) Detection results of Redet-ReResNet-50; (j) Detection results of DRBox-V2; (k) Detection results of R-FCOS-ResNet-101; (l) Detection results of CAF-ResNet-101; (m) Detection results of Polar Encoding-ResNet-101)
表 1 现有公开数据集详细信息
Table 1. Detailed information of existing public datasets
数据集 公开时间 数据来源 分辨率(m) 图像尺寸 图像数量 任务 OpenSARShip-1.0
OpenSARShip-2.02017 Sentinel-1 2.7×22~
3.5×22,
20×229×9~445×445
1×1~445×44511346
34528识别 SSDD 2017 RadarSat-2
TerraSAR-X
Sentinel-11~15 190~668 1160 垂直边框检测
斜框检测
语义分割SAR-Ship-Dataset 2019 Gaofen-3
Sentinel-13~25 256×256 43918 垂直边框检测 AIR-SARShip-1.0
AIR-SARShip-2.02019 Gaofen-3 1, 3 3000×3000
1000×100031
300垂直边框检测 FUSAR-Ship 2020 Gaofen-3 1.700×1.124~
1.754×1.124512×512 5243 识别 HRSID 2021 Sentinel-1
TerraSAR-X0.5, 1.0, 3.0 800×800 5604 垂直边框检测
语义分割LS-SSDD-v1.0 2021 Sentinel-1 5×20 24000×16000 15 垂直边框检测 SRSDD-v1.0 2021 Gaofen-3 1 1024×1024 666 斜框检测
识别RSDD-SAR 2022 Gaofen-3
TerraSAR-X2~20 512×512 7000 斜框检测  下载: 导出CSV
下载: 导出CSV
表 2 原始数据详细信息
Table 2. Detailed information of the raw data
景号 传感器 经度 纬度 成像时间 成像模式 分辨率(m) 极化方式 产品级别 入射角(°) 成像幅宽(km) 编号 1 GF-3 E121.0 N37.9 20171017 FSII 10 HH,HV L1A 19~50 100 0-1
下载: 导出CSV
表 3 依据COCO划分标准RSDD-SAR舰船尺寸统计
Table 3. Area statistics of ships in RSDD-SAR according to COCO
目标类型 数量 比例 Small (area < 322) 8331 81.17% Medium (322 < area < 962) 1927 18.78% Large (area > 962) 5 0.05%
下载: 导出CSV
目标类型 数量 比例 Small (area < 625) 6146 59.88% Medium (625 ≤ area ≤ 7500) 4109 40.04% Large (area > 7500) 8 0.08%
下载: 导出CSV
表 5 不同算法实验结果
Table 5. Experimental results of different algorithms
模型 骨干网络 Params (M) FPS Inshore AP50(%) Offshore AP50(%) AP50(%) 两阶段 R-Faster R-CNN ResNet-101 60.45 13.28 50.99 91.47 84.10 ResNet-50 41.41 15.87 48.78 90.93 83.29 ResNet-18 28.30 22.36 43.18 88.57 80.30 RoI Transformer ResNet-101 74.37 8.10 64.40 94.85 89.48 ResNet-50 55.32 11.93 60.83 94.35 88.39 ResNet-18 42.21 13.71 56.51 93.30 86.60 Gliding Vertex ResNet-101 60.45 13.32 62.24 93.50 88.16 ResNet-50 41.41 16.82 55.93 91.65 85.55 ResNet-18 28.29 22.33 51.48 91.49 84.63 Oriented R-CNN ResNet-101 60.34 21.90 66.77 90.28 88.85 ResNet-50 41.35 26.60 65.92 90.21 88.84 ResNet-18 28.28 34.30 61.82 90.05 87.50 ReDet ReResNet-50 31.57 15.90 61.94 90.34 88.40 单阶段 R-RetinaNet ResNet-101 51.49 15.33 35.75 74.92 67.89 ResNet-50 32.44 22.31 33.20 74.06 66.66 ResNet-18 19.38 34.15 30.10 72.74 65.09 S2ANet ResNet-101 55.50 15.74 66.43 94.94 90.06 ResNet-50 36.45 23.46 63.27 93.14 87.91 ResNet-18 19.85 32.06 59.61 92.50 86.88 R3Det ResNet-101 60.80 24.10 57.73 90.09 80.92 ResNet-50 41.81 29.30 56.87 90.16 80.87 ResNet-18 25.25 37.60 54.92 89.69 80.44 DRBox-V2 VGG16 15.91 28.28 57.79 91.28 85.63 无锚框 R-FCOS ResNet-101 51.21 18.85 56.17 93.79 87.31 ResNet-50 32.17 31.39 50.02 93.09 85.48 ResNet-18 19.11 42.01 49.48 92.33 84.78 CFA ResNet-101 55.82 25.80 67.35 90.33 89.46 ResNet-50 36.83 36.60 66.40 90.47 89.31 ResNet-18 20.27 52.20 67.35 90.27 88.97 Polar Encoding ResNet-101 71.83 16.71 62.02 89.99 87.88 ResNet-50 52.83 17.56 59.69 90.12 87.31 ResNet-18 13.36 27.48 58.05 89.31 85.28
下载: 导出CSV
表 6 泛化能力测试
Table 6. Generalization ability testing results
模型 训练集 验证集 验证集AP50(%) 测试集512×512
AP50(%)测试集800×800
AP50(%)S2ANet-ResNet-101 RSDD-SAR训练集 RSDD-SAR测试集 90.06 57.47(–32.59) 63.04(–27.02) SSDD训练集 SSDD测试集 90.52 36.24(–54.28) 47.87(–42.65) S2ANet-ResNet-50 RSDD-SAR训练集 RSDD-SAR测试集 87.91 56.04(–31.87) 63.15(–24.76) SSDD训练集 SSDD测试集 92.73 41.81(–50.92) 51.83(–40.90) S2ANet-ResNet-18 RSDD-SAR训练集 RSDD-SAR测试集 86.88 55.73(–31.15) 62.04(–24.84) SSDD训练集 SSDD测试集 90.30 34.52(–55.78) 48.89(–41.41)
下载: 导出CSV
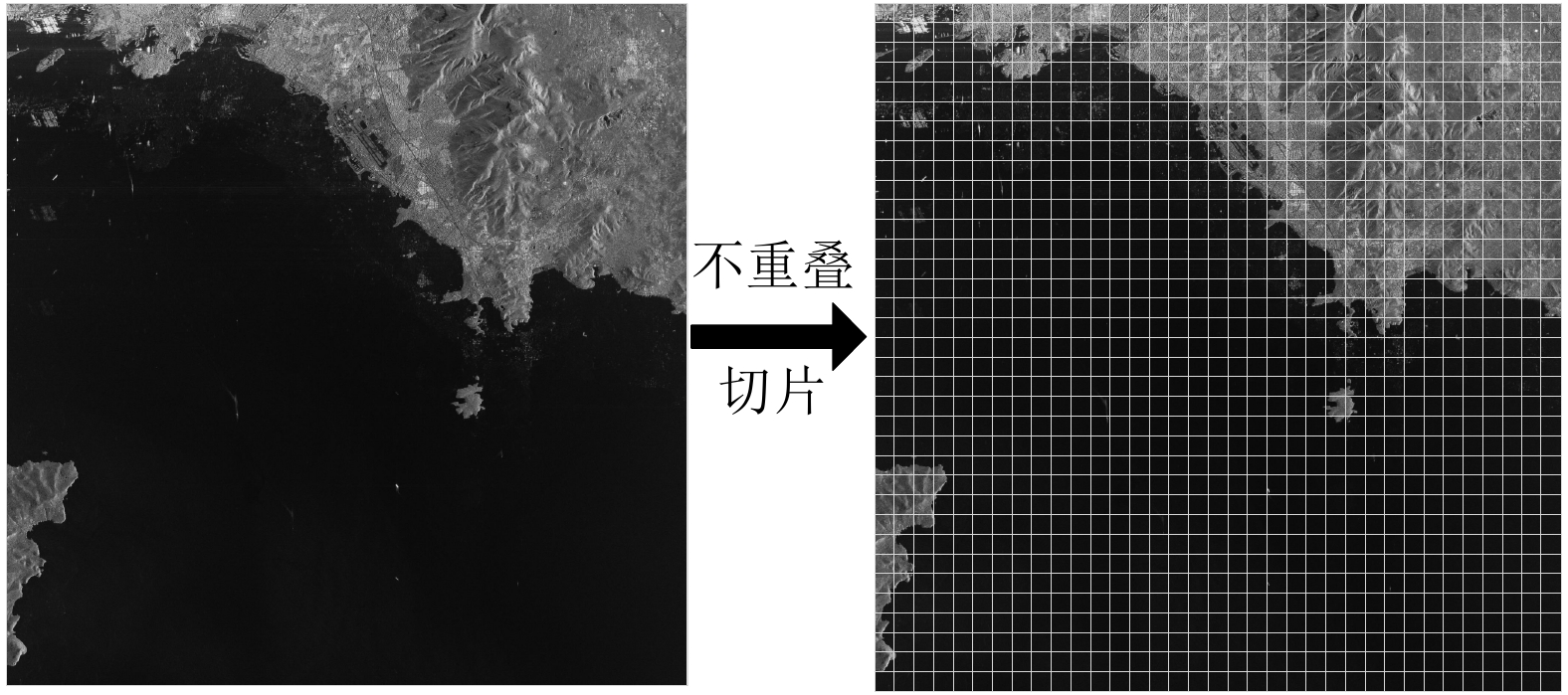
表 7 未剪裁大图测试结果
Table 7. Results on uncropped images
模型 训练集 验证集 验证集AP50(%) 未剪裁大图AP50(%) S2ANet-ResNet-101 RSDD-SAR训练集 RSDD-SAR测试集 90.06 65.97(–24.09) SSDD训练集 SSDD测试集 90.52 51.04(–39.48)
下载: 导出CSV
1 RSDD-SAR数据集详细信息
1. RSDD-SAR dataset information in detail
景号 传感器 经度 纬度 时间 成像模式 分辨率(m) 极化方式 产品级别 入射角(°) 成像幅宽(km) 编号 1 GF-3 E121.0 N37.9 20171017 FSII 10 HH,HV L1A 19~50 100 0-1 2 GF-3 E119.3 N37.2 20210809 UFS 3 DH L1A 20~50 30 2 3 GF-3 E121.3 N37.5 20180901 FSI 5 HH,HV L1A 19~50 50 3-4 4 GF-3 E120.5 N37.9 20210228 FSI 5 VH,VV L1A 19~50 50 5-6 5 GF-3 E121.0 N35.8 20210228 FSI 5 VH,VV L1A 19~50 50 7-8 6 GF-3 E119.1 N38.2 20210619 FSI 5 DV L1A 19~50 50 9 7 GF-3 E120.5 N37.8 20210526 SS 25 HH,HV L1A 17~50 130 10-11 8 GF-3 E120.5 N35.6 20210716 SS 25 HH,HV L1A 17~50 130 12-13 9 GF-3 E122.9 N37.5 20191231 UFS 3 DH L1A 20~50 30 14 10 GF-3 E119.8 N35.0 20210228 UFS 3 DH L1A 20~50 30 15 11 GF-3 E119.8 N35.3 20210228 UFS 3 DH L1A 20~50 30 16 12 GF-3 E120.4 N37.9 20210228 UFS 3 DH L1A 20~50 30 17 13 GF-3 E120.9 N37.9 20210718 FSII 10 HH,HV L1A 19~50 100 18-19 14 GF-3 E120.3 N36.0 20210305 FSI 5 VH,VV L1A 19~50 50 20-21 15 GF-3 E121.6 N37.6 20210802 FSI 5 HH,HV L1A 19~50 50 22-23 16 GF-3 E122.5 N37.5 20210130 SS 25 VH,VV L1A 17~50 130 24-25 17 GF-3 E120.3 N35.6 20210504 SS 25 VH,VV L1A 17~50 130 26-27 18 GF-3 E120.6 N36.2 20210519 SS 25 HH,HV L1A 17~50 130 28-29 19 GF-3 E121.0 N36.0 20210612 SS 25 VH,VV L1A 17~50 130 30-31 20 GF-3 E121.5 N38.2 20210612 SS 25 VH,VV L1A 17~50 130 32-33 21 GF-3 E120.1 N36.0 20210723 SS 25 HH,HV L1A 17~50 130 34-35 22 GF-3 E120.6 N38.1 20210723 SS 25 HH,HV L1A 17~50 130 36-37 23 GF-3 E119.8 N35.0 20210130 UFS 3 DH L1A 20~50 30 38 24 GF-3 E119.8 N35.3 20210130 UFS 3 DH L1A 20~50 30 39 25 GF-3 E119.9 N35.6 20210130 UFS 3 DH L1A 20~50 30 40 26 GF-3 E120.4 N37.9 20210130 UFS 3 DH L1A 20~50 30 41 27 GF-3 E121.6 N37.6 20210427 UFS 3 DH L1A 20~50 30 42 28 GF-3 E118.8 N38.1 20210521 UFS 3 DH L1A 20~50 30 43 29 GF-3 E122.1 N37.5 20210101 FSI 5 VH,VV L1A 19~50 50 44-45 30 GF-3 E121.1 N35.8 20210113 FSI 5 VH,VV L1A 19~50 50 46-47 31 GF-3 E120.9 N36.1 20210125 FSI 5 VH,VV L1A 19~50 50 48-49 32 GF-3 E120.3 N38.2 20210204 FSI 5 VH,VV L1A 19~50 50 50-51 33 GF-3 E120.7 N36.1 20210329 SS 25 VH,VV L1A 17~50 130 52-53 34 GF-3 E119.6 N37.9 20210417 SS 25 VH,VV L1A 17~50 130 54-55 35 TerraSAR-X E056 N27 20080311 SL 2 HH SSC 20~55 10 56 36 TerraSAR-X E100 N13 20111209 SM 3 HH MGD 20~45 30×50 57 37 TerraSAR-X E013 S08 20190730 SM 3 HH EEC 20~45 30×50 58 38 TerraSAR-X W090 N29 20100516 SM 3 HH EEC 20~45 30×50 59 39 TerraSAR-X W090 N29 20120829 SM 3 HH EEC 20~45 30×50 60 40 TerraSAR-X W090 N29 20170807 SM 3 HH SSC 20~45 30×50 61 41 TerraSAR-X E023 N37 20180416 SM 3 HH SSC 20~45 30×50 62 42 TerraSAR-X E023 N37 20160830 SM 3 HH SSC 20~45 30×50 63 43 TerraSAR-X E023 N37 20170305 SM 3 HH SSC 20~45 30×50 64 44 TerraSAR-X E023 N37 20170623 SM 3 HH SSC 20~45 30×50 65 45 TerraSAR-X E023 N37 20170828 SM 3 HH SSC 20~45 30×50 66 46 TerraSAR-X E023 N37 20171022 SM 3 HH SSC 20~45 30×50 67 47 TerraSAR-X E023 N37 20171205 SM 3 HH SSC 20~45 30×50 68 48 TerraSAR-X E023 N37 20180209 SM 3 HH SSC 20~45 30×50 69 49 TerraSAR-X E023 N37 20180621 SM 3 HH SSC 20~45 30×50 70 50 TerraSAR-X E023 N37 20180815 SM 3 HH SSC 20~45 30×50 71 51 TerraSAR-X E023 N37 20181020 SM 3 HH SSC 20~45 30×50 72 52 TerraSAR-X E023 N37 20190127 SM 3 HH SSC 20~45 30×50 73 53 TerraSAR-X E023 N37 20190323 SM 3 HH SSC 20~45 30×50 74 54 TerraSAR-X E023 N37 20190619 SM 3 HH SSC 20~45 30×50 75 55 TerraSAR-X E023 N37 20190904 SM 3 HH SSC 20~45 30×50 76 56 TerraSAR-X E023 N37 20160614 SM 3 HH SSC 20~45 30×50 77 57 TerraSAR-X E121 N31 20151016 SM 3 VV SSC 20~45 30×50 78 58 TerraSAR-X E121 N31 20160614 SM 3 VV SSC 20~45 30×50 79 59 TerraSAR-X E121 N31 20160717 SM 3 VV SSC 20~45 30×50 80 60 TerraSAR-X E121 N31 20160819 SM 3 VV SSC 20~45 30×50 81 61 TerraSAR-X E121 N31 20151118 SM 3 VV SSC 20~45 30×50 82 62 TerraSAR-X E121 N31 20151210 SM 3 VV SSC 20~45 30×50 83 63 TerraSAR-X E121 N31 20160101 SM 3 VV SSC 20~45 30×50 84 64 TerraSAR-X E121 N31 20160203 SM 3 VV SSC 20~45 30×50 85 65 TerraSAR-X E121 N31 20160409 SM 3 VV SSC 20~45 30×50 86 66 TerraSAR-X E121 N31 20160512 SM 3 VV SSC 20~45 30×50 87 67 TerraSAR-X E119 N37 20151220 SM 3 HH SSC 20~45 30×50 88 68 TerraSAR-X E023 N37 20120305 SM 3 HH SSC 20~45 30×50 89 69 TerraSAR-X E023 N37 20120601 SM 3 HH SSC 20~45 30×50 90 70 TerraSAR-X E023 N37 20120908 SM 3 HH SSC 20~45 30×50 91 71 TerraSAR-X E023 N37 20121205 SM 3 HH SSC 20~45 30×50 92 72 TerraSAR-X E023 N37 20130314 SM 3 HH SSC 20~45 30×50 93 73 TerraSAR-X E023 N37 20151129 SM 3 HH SSC 20~45 30×50 94 74 TerraSAR-X E023 N37 20160225 SM 3 HH SSC 20~45 30×50 95 75 TerraSAR-X E023 N37 20160420 SM 3 HH SSC 20~45 30×50 96 76 GF-3 E119.3 N35.0 20200619 FSII 10 HH,HV L1A 19~50 100 97-98 77 GF-3 E120.1 N38.0 20200619 FSII 10 HH,HV L1A 19~50 100 99-100 78 GF-3 E118.4 N38.0 20200711 FSII 10 HH,HV L1A 19~50 100 101-102 79 GF-3 E118.0 N38.1 20200718 FSII 10 HH,HV L1A 19~50 100 103-104 80 GF-3 E118.8 N38.5 20200730 FSII 10 HH,HV L1A 19~50 100 105-106 81 GF-3 E119.5 N34.9 20200730 FSII 10 HH,HV L1A 19~50 100 107-108 82 GF-3 E118.9 N37.9 20200804 FSII 10 HH,HV L1A 19~50 100 109-110 83 GF-3 E117.9 N38.6 20200809 FSII 10 HH,HV L1A 19~50 100 111-112 84 GF-3 E118.5 N38.2 20200809 FSII 10 HH,HV L1A 19~50 100 113-114 85 GF-3 E120.2 N35.0 20201001 FSII 10 VH,VV L1A 19~50 100 115-116 86 GF-3 E120.5 N36.0 20201001 FSII 10 VH,VV L1A 19~50 100 117-118 87 GF-3 E121.0 N38.0 20201001 FSII 10 VH,VV L1A 19~50 100 119-120 88 GF-3 E119.7 N35.4 20200804 FSI 5 HH,HV L1A 19~50 50 121-122 89 GF-3 E119.8 N35.0 20200804 FSI 5 HH,HV L1A 19~50 50 123-124 90 GF-3 E120.8 N38.4 20201128 FSI 5 VH,VV L1A 19~50 50 125-126 91 GF-3 E120.9 N37.9 20201128 FSI 5 VH,VV L1A 19~50 50 127-128 92 GF-3 E121.3 N36.0 20201128 FSI 5 VH,VV L1A 19~50 50 129-130 93 GF-3 E118.1 N38.2 20200525 FSI 5 HH,HV L1A 19~50 50 131-132 94 GF-3 E120.2 N35.7 20200602 SS 25 VH,VV L1A 17~50 130 133-134 95 GF-3 E119.5 N35.7 20200711 FSII 10 VH,VV L1A 19~50 100 135-136 96 GF-3 E118.8 N38.3 20200728 FSII 10 HH,HV L1A 19~50 100 137-138 97 GF-3 E119.6 N35.3 20200728 FSII 10 HH,HV L1A 19~50 100 139-140 98 GF-3 E120.2 N35.4 20200519 SS 25 VH,VV L1A 17~50 130 141-142 99 GF-3 E119.9 N37.7 20200521 SS 25 VH,VV L1A 17~50 130 143-144 100 GF-3 E120.2 N35.8 20200521 SS 25 VH,VV L1A 17~50 130 145-146 101 GF-3 E120.4 N34.9 20200521 SS 25 VH,VV L1A 17~50 130 147-148 102 GF-3 E121.0 N35.8 20200502 FSII 10 VH,VV L1A 19~50 100 149-150 103 GF-3 E120.5 N35.9 20200509 FSII 10 VH,VV L1A 19~50 100 151-152 104 GF-3 E120.0 N38.5 20200514 FSII 10 VH,VV L1A 19~50 100 153-154 105 GF-3 E120.0 N38.3 20200729 FSII 10 HH,HV L1A 19~50 100 155-156 106 GF-3 E120.6 N36.0 20201006 FSII 10 VH,VV L1A 19~50 100 157-158 107 GF-3 E122.8 N37.2 20200924 QPSI 8 HH,HV,VH,VV L1A 20~41 30 159-162 108 GF-3 E120.0 N35.4 20201030 QPSI 8 HH,HV,VH,VV L1A 20~41 30 163-166 109 GF-3 E119.1 N37.4 20200814 UFS 3 DH L1A 20~50 30 167 110 GF-3 E119.2 N38.0 20200814 UFS 3 DH L1A 20~50 30 168 111 GF-3 E120.1 N37.8 20200926 UFS 3 DH L1A 20~50 30 169 112 GF-3 E120.5 N36.0 20200926 UFS 3 DH L1A 20~50 30 170 113 GF-3 E121.3 N37.7 20201121 UFS 3 DH L1A 20~50 30 171 114 GF-3 E121.6 N36.6 20201121 UFS 3 DH L1A 20~50 30 172 115 GF-3 E120.0 N38.5 20201104 FSII 10 VH,VV L1A 19~50 100 173-174 116 GF-3 E121.1 N35.8 20201126 FSI 5 VH,VV L1A 19~50 50 175-176 117 GF-3 E121.5 N37.7 20201126 FSI 5 VH,VV L1A 19~50 50 177-178 118 GF-3 E121.4 N38.1 20200519 SS 25 VH,VV L1A 17~50 130 179-180 119 GF-3 E120.9 N35.4 20200531 SS 25 VH,VV L1A 17~50 130 181-182 120 GF-3 E119.8 N37.9 20200619 SS 25 VH,VV L1A 17~50 130 183-184 121 GF-3 E120.4 N35.1 20200619 SS 25 VH,VV L1A 17~50 130 185-186 122 GF-3 E120.3 N34.8 20200704 SS 25 VH,VV L1A 17~50 130 187-188 123 GF-3 E120.5 N35.8 20200704 SS 25 VH,VV L1A 17~50 130 189-190 124 GF-3 E121.9 N37.7 20201011 UFS 3 DH L1A 20~50 30 191 125 GF-3 E118.0 N38.3 20201111 UFS 3 DH L1A 20~50 30 192 126 GF-3 E119.8 N35.2 20210619 FSI 5 DV L1A 19~50 50 GF3 127 TerraSAR-X E119 N37 20151128 SM 3 HH SSC 20~45 30×50 Terra
下载: 导出CSV
-
[1] LI Jianwei, QU Changwen, and SHAO Jiaqi. Ship detection in SAR images based on an improved faster R-CNN[C]. 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Beijing, China, 2017: 1–6. [2] ZHANG Xiaohan, WANG Haipeng, XU Congan, et al. A lightweight feature optimizing network for ship detection in SAR image[J]. IEEE Access, 2019, 7: 141662–141678. doi: 10.1109/ACCESS.2019.2943241 [3] ZHANG Tianwen, ZHANG Xiaoling, SHI Jun, et al. Depthwise separable convolution neural network for high-speed SAR ship detection[J]. Remote Sensing, 2019, 11(21): 2483. doi: 10.3390/rs11212483 [4] ZHANG Peng, TANG Jinsong, ZHONG Heping, et al. Self-trained target detection of radar and sonar images using automatic deep learning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 4701914. doi: 10.1109/TGRS.2021.3096011 [5] 孙显, 王智睿, 孙元睿, 等. AIR-SARShip-1.0: 高分辨率SAR舰船检测数据集[J]. 雷达学报, 2019, 8(6): 852–862. doi: 10.12000/JR19097SUN Xian, WANG Zhirui, SUN Yuanrui, et al. AIR-SARShip-1.0: High-resolution SAR ship detection dataset[J]. Journal of Radars, 2019, 8(6): 852–862. doi: 10.12000/JR19097 [6] WANG Yuanyuan, WANG Chao, ZHANG Hong, et al. A SAR dataset of ship detection for deep learning under complex backgrounds[J]. Remote Sensing, 2019, 11(7): 765. doi: 10.3390/rs11070765 [7] WEI Shunjun, ZENG Xiangfeng, QU Qizhe, et al. HRSID: A high-resolution SAR images dataset for ship detection and instance segmentation[J]. IEEE Access, 2020, 8: 120234–120254. doi: 10.1109/ACCESS.2020.3005861 [8] ZHANG Tianwen, ZHANG Xiaoling, KE Xiao, et al. LS-SSDD-v1.0: A deep learning dataset dedicated to small ship detection from large-scale Sentinel-1 SAR images[J]. Remote Sensing, 2020, 12(18): 2997. doi: 10.3390/RS12182997 [9] LEI Songlin, LU Dongdong, QIU Xiaolan, et al. SRSDD-v1.0: A high-resolution SAR rotation ship detection dataset[J]. Remote Sensing, 2021, 13(24): 5104. doi: 10.3390/rs13245104 [10] HUANG Lanqing, LIU Bin, LI Boying, et al. OpenSARShip: A dataset dedicated to Sentinel-1 ship interpretation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(1): 195–208. doi: 10.1109/JSTARS.2017.2755672 [11] LI Boying, LIU Bin, HUANG Lanqing, et al. OpenSARShip 2.0: A large-volume dataset for deeper interpretation of ship targets in Sentinel-1 imagery[C]. 2017 SAR in Big Data Era: Models, Methods and Applications, Beijing, China, 2017: 1–5. [12] HOU Xiyue, AO Wei, SONG Qian, et al. FUSAR-Ship: Building a high-resolution SAR-AIS matchup dataset of Gaofen-3 for ship detection and recognition[J]. Science China Information Sciences, 2020, 63(4): 140303. doi: 10.1007/s11432-019-2772-5 [13] ZHANG Tianwen, ZHANG Xiaoling, LI Jianwei, et al. SAR ship detection dataset (SSDD): Official release and comprehensive data analysis[J]. Remote Sensing, 2021, 13(18): 3690. doi: 10.3390/rs13183690 [14] European Space Agency[EB/OL]. https://www.esa.int/, 2022. [15] ITTVIS. ENVI-Image processing and analysis software solution[EB/OL]. https://www.ittvis.com/envi/, 2022. [16] PIE-SAR[EB/OL]. https://www.piesat.cn/product/PIE-SAR/index.html, 2022. [17] EVERINGHAM M, VAN GOOL L, WILLIAMS C K I, et al. The Pascal visual object classes (VOC) challenge[J]. International Journal of Computer Vision, 2010, 88(2): 303–338. doi: 10.1007/s11263-009-0275-4 [18] HE Yishan, GAO Feo, WANG Jun, et al. Learning polar encodings for arbitrary-oriented ship detection in SAR images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 3846–3859. doi: 10.1109/JSTARS.2021.3068530 [19] RoLabelImg: Label rotated rect on images for training[EB/OL].https://github.com/cgvict/roLabelImg, 2022. [20] LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: Common objects in context[C]. The 13th European Conference on Computer Vision, Zurich, Switzerland, 2014: 740–755. [21] REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[C]. The 28th International Conference on Neural Information Processing Systems, Montreal, Canada, 2015: 91–99. [22] REDMON J and FARHADI A. YOLO9000: Better, faster, stronger[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6517–6525. [23] REDMON J and FARHADI A. YOLOv3: An incremental improvement[EB/OL]. https://arxiv.org/abs/1804.02767, 2018. [24] BOCHKOVSKIY A, WANG C Y, and LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[EB/OL]. https://arxiv.org/abs/2004.10934, 2020. [25] LIU Wei, ANGUELOV D, ERHAN D, et al. SSD: Single shot MultiBox detector[C]. The 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 2016: 21–37. [26] LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]. 2017 IEEE International Conference on Computer Vision, Venice, Italy, 2017: 2999–3007. [27] ZHOU Xingyi, WANG Dequan, and KRÄHENBÜHL P. Objects as points[EB/OL]. http://arxiv.org/abs/1904.07850, 2019. [28] TIAN Zhi, SHEN Chunhua, CHEN Hao, et al. FCOS: Fully convolutional one-stage object detection[C]. 2019 IEEE/CVF International Conference on Computer Vision, Seoul, South Korea, 2019: 9626–9635. [29] DING Jian, XUE Nan, LONG Yang, et al. Learning RoI transformer for oriented object detection in aerial images[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 2844–2853. [30] XU Yongchao, FU Mingtao, WANG Qimeng, et al. Gliding vertex on the horizontal bounding box for multi-oriented object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(4): 1452–1459. doi: 10.1109/TPAMI.2020.2974745 [31] XIE Xingxing, CHENG Gong, WANG Jiabao, et al. Oriented R-CNN for object detection[C]. 2021 IEEE/CVF International Conference on Computer Vision, Montreal, Canada, 2021: 3500–3509. [32] HAN Jiaming, DING Jian, XUE Nan, et al. ReDet: A rotation-equivariant detector for aerial object detection[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, Canada, 2021: 2785–2794. [33] HAN Jiaming, DING Jian, LI Jie, et al. Align deep features for oriented object detection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5602511. doi: 10.1109/TGRS.2021.3062048 [34] YANG Xue, YAN Junchi, FENG Ziming, et al. R3Det: Refined single-stage detector with feature refinement for rotating object[C]. Thirty-Fifth AAAI Conference on Artificial Intelligence, Vancouver, Canada, 2021. [35] GUO Zonghao, LIU Chang, ZHANG Xiaosong, et al. Beyond bounding-box: Convex-hull feature adaptation for oriented and densely packed object detection[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 8788–8797. [36] AN Quanzhi, PAN Zongxu, LIU Lei, et al. DRBox-v2: An improved detector with rotatable boxes for target detection in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(11): 8333–8349. doi: 10.1109/TGRS.2019.2920534 [37] HU Shimin, LIANG Dun, YANG Guoye, et al. Jittor: A novel deep learning framework with meta-operators and unified graph execution[J]. Science China Information Sciences, 2020, 63(12): 222103. doi: 10.1007/s11432-020-3097-4 [38] ZHOU Yue, YANG Xue, ZHANG Gefan, et al. MMRotate: A rotated object detection benchmark using PyTorch[EB/OL]. https://github.com/open-mmlab/mmrotate, 2022. [39] GOYAL P, DOLLÁR P, GIRSHICK R, et al. Accurate, large minibatch SGD: Training ImageNet in 1 hour[EB/OL]. https://arxiv.org/abs/1706.02677, 2018. [40] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770–778. -














计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

