
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Anti-interrupted Sampling Repeater Jamming Method Based on Frequency-agile Radar Joint Fuzzy C-means
-
摘要: 间歇采样噪声调制转发干扰是一种兼具压制和欺骗特点的新型有源干扰,是目前雷达抗干扰领域的难点之一。为了提高捷变频雷达对抗噪声调制的间歇采样转发干扰(ISRJ)的能力,该文结合ISRJ时域不连续的特点,提出一种基于频率捷变体制雷达联合模糊C均值(FCM)的抗ISRJ方法。首先,该文设计一种脉内频率编码-脉间频率捷变的雷达发射波形;雷达接收到回波信号后,通过频域窄带滤波得到不同脉内频率编码对应的子脉冲信号;然后利用FCM算法判断脉冲压缩后的子脉冲中是否含有干扰;最后,通过压缩感知(CS)算法实现脉间频率跳变波形的相参积累。理论分析和仿真实验证明该算法可以有效对抗ISRJ。Abstract: Intermittent sampling noise modulation and forward jamming is a novel active jamming method with both suppression and deception characteristics and is a challenge often encountered in radar anti-jamming. To improve the capability of frequency-agile radar to resist noise-modulated Intermittent Sampling Repeater Jamming (ISRJ), we propose an anti-ISRJ method based on frequency-agile radar joint Fuzzy C-Means (FCM). First, we designed a radar-transmitted waveform with intra pulse frequency coding and inter pulse frequency agility. Second, after receiving the echo signal, we obtained the sub pulse signals corresponding to different intra-pulse frequency codes via narrow-band filtering in the frequency domain. Third, we adopted the FCM algorithm to determine the presence of ISRJs in the sub pulses after pulse compression. Finally, we realized the phase-coherent accumulation of inter pulse frequency-hopping waveform using the compressed sensing algorithm. Theoretical analysis and simulation experiments showed that the proposed method can effectively resist ISRJ.
-
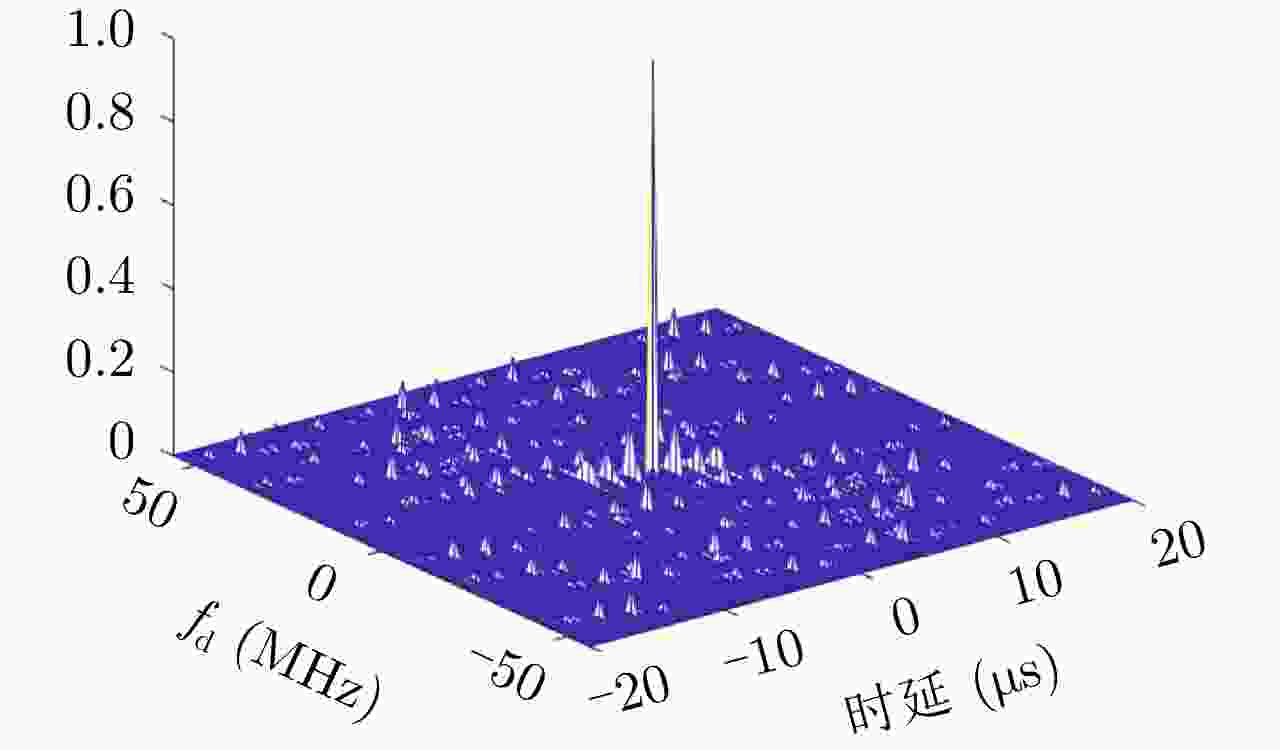
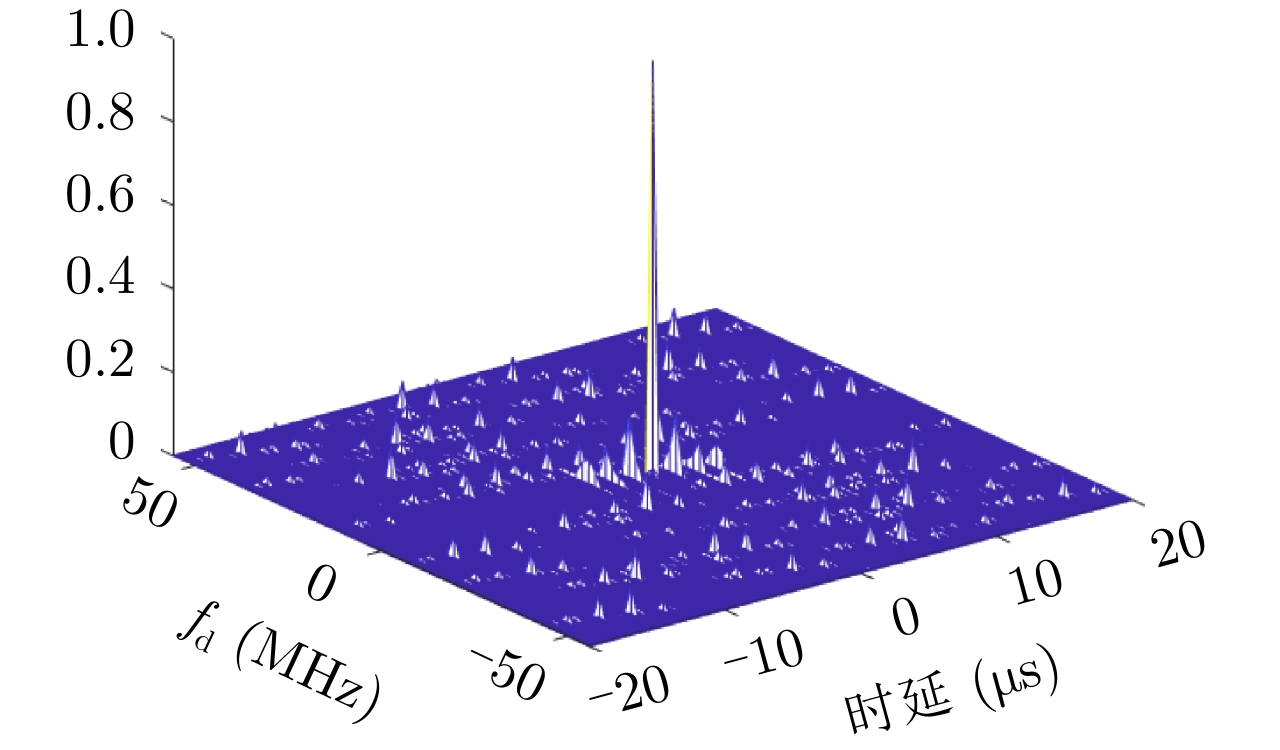
图 3 本文设计波形的模糊函数图
Figure 3. Ambiguity function diagram of the waveform designed in this paper
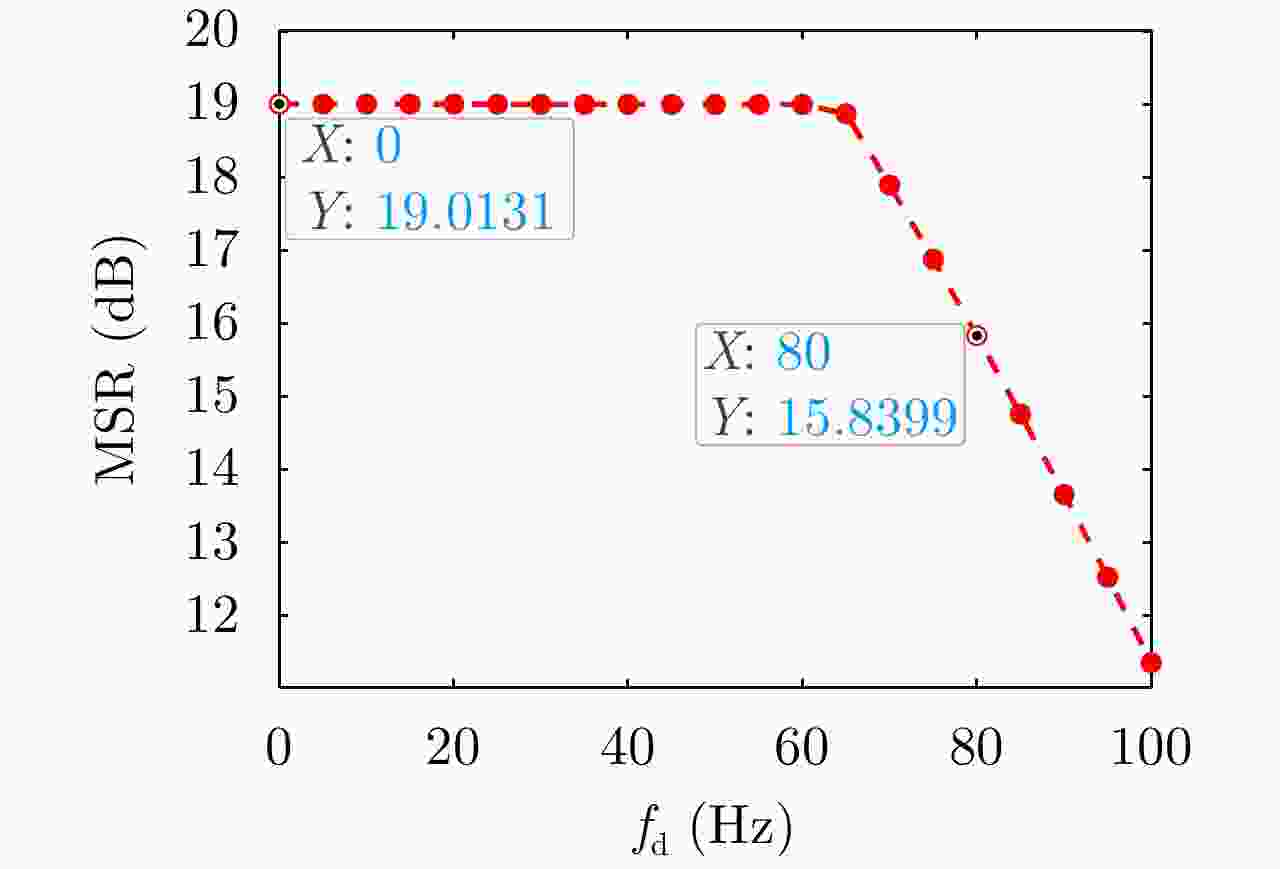
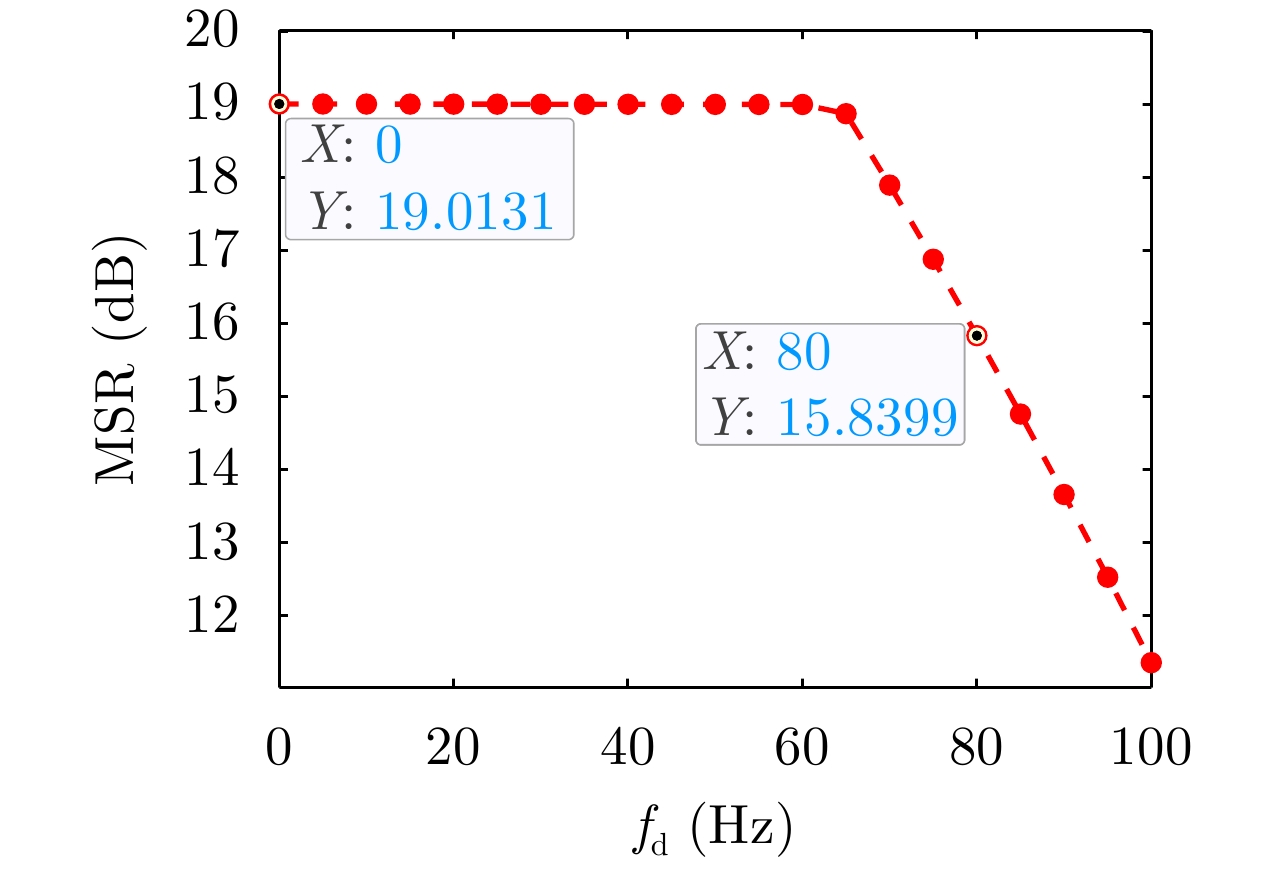
图 4 多普勒频率与距离模糊图主旁瓣比的关系曲线
Figure 4. Relationship curve between Doppler frequency and the main sidelobe ratio of distance fuzzy graph
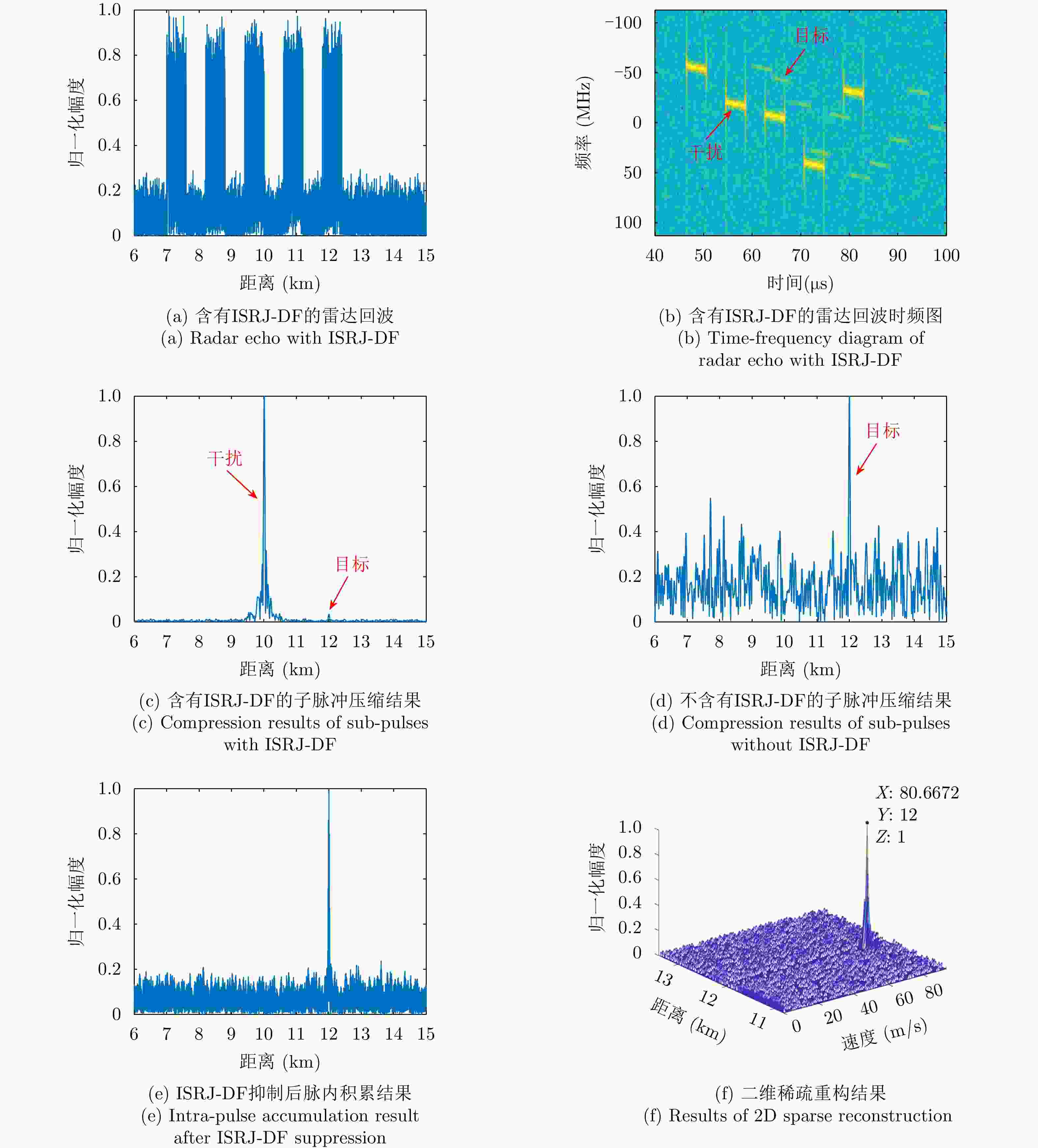
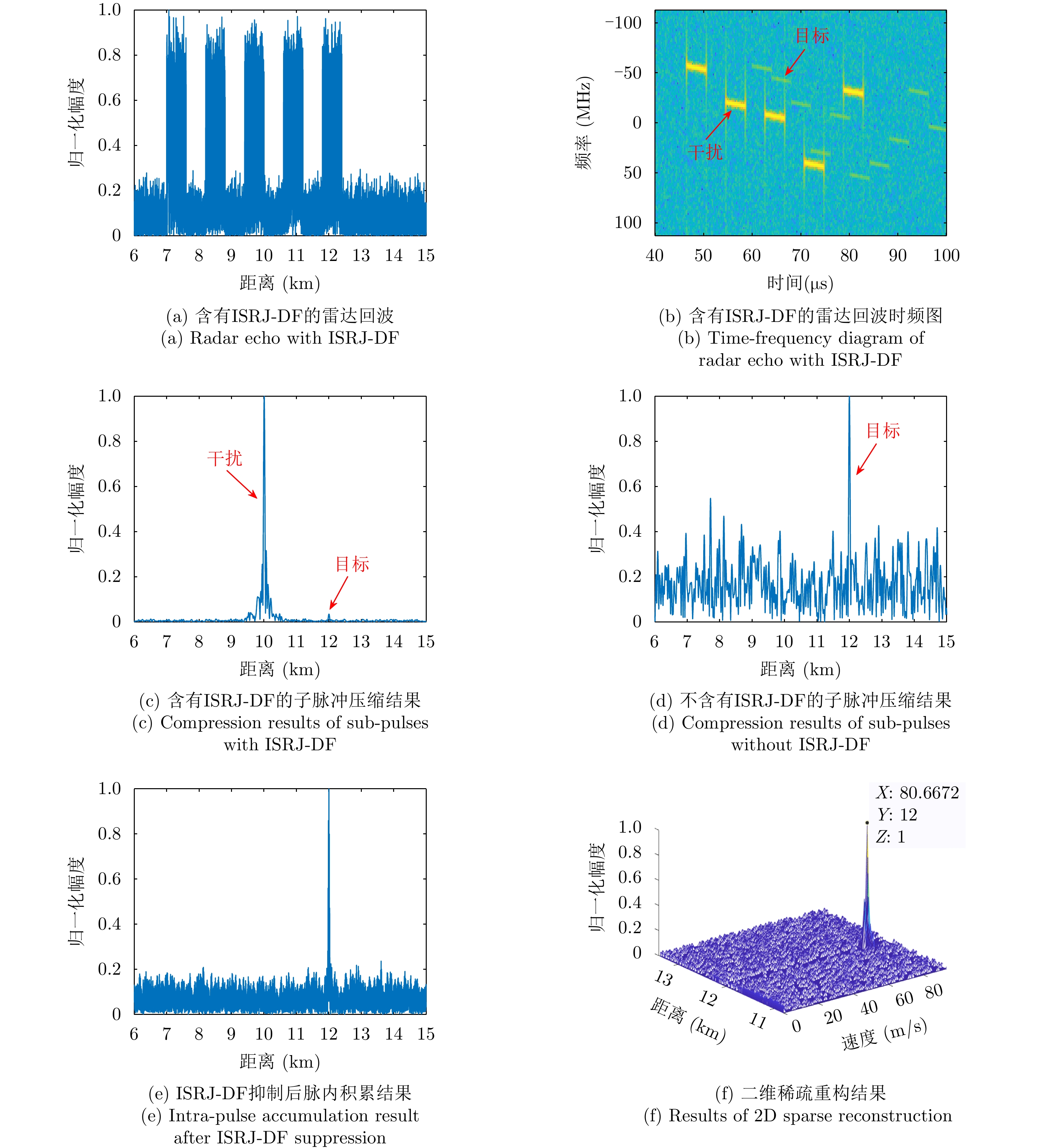
图 5 所提方法对ISRJ-DF的对抗效果图
Figure 5. Antagonistic effect diagram of the proposed method against ISRJ-DF
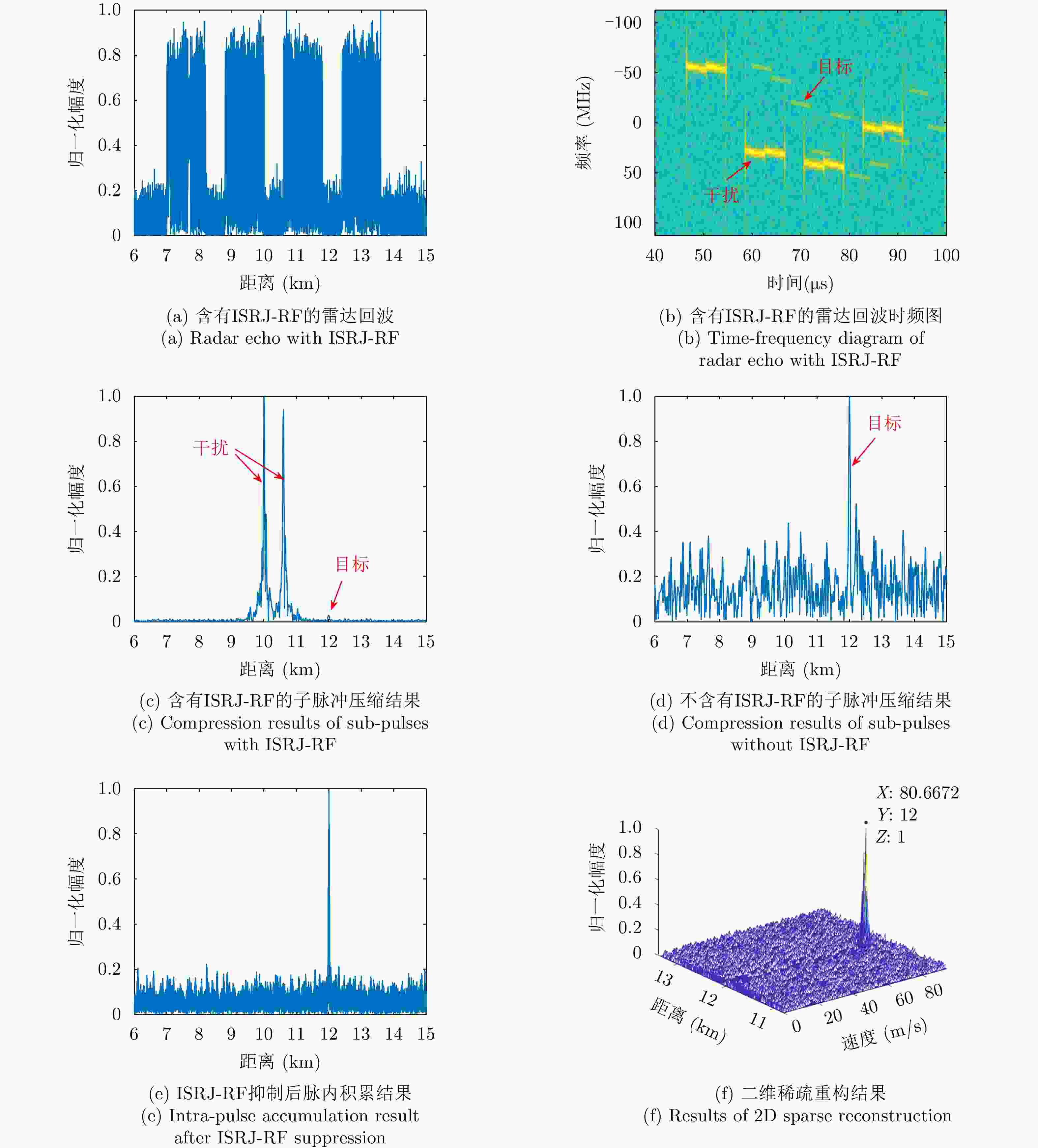
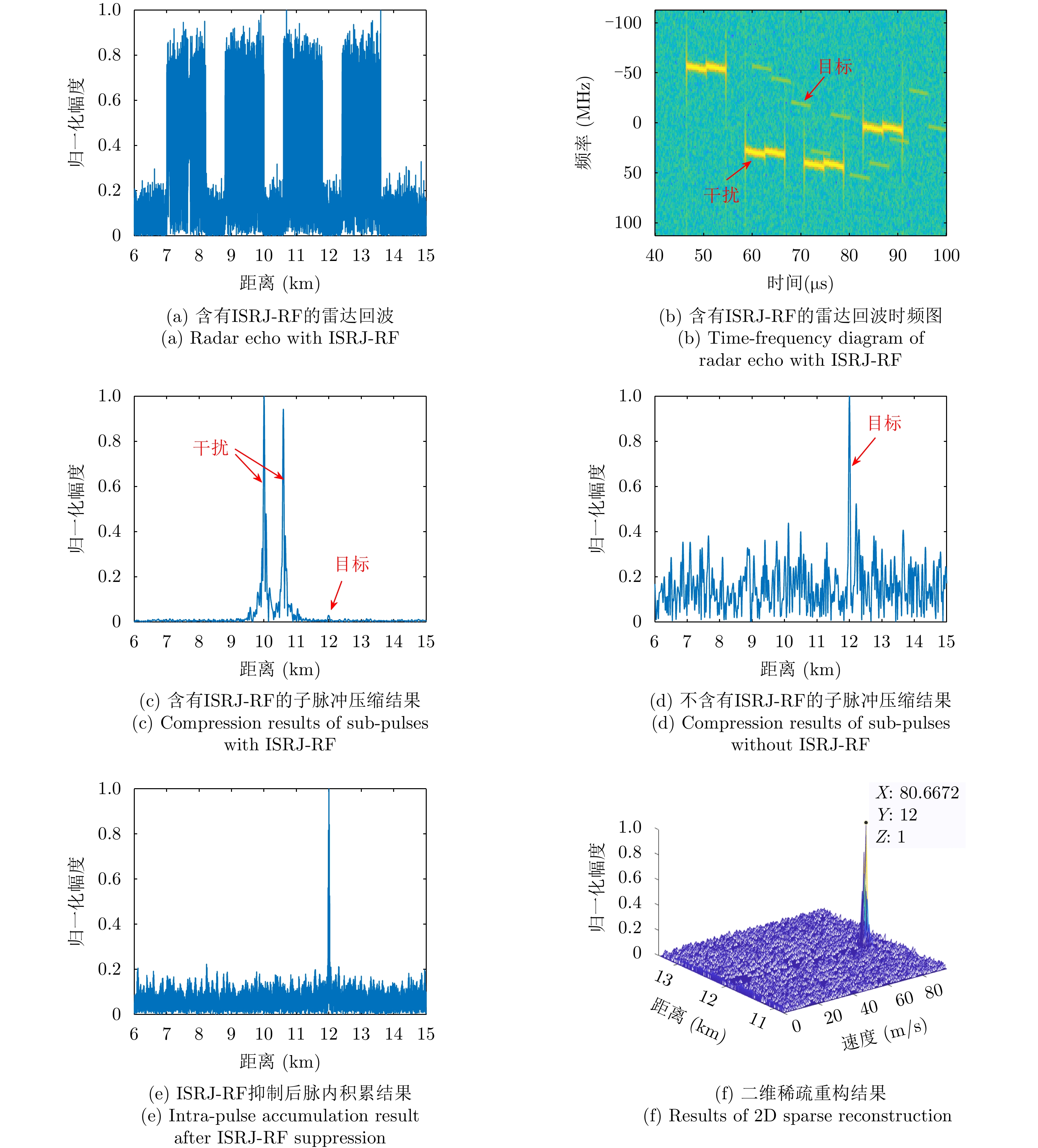
图 6 所提方法对ISRJ-RF的对抗效果图
Figure 6. Antagonistic effect diagram of the proposed method against ISRJ-RF
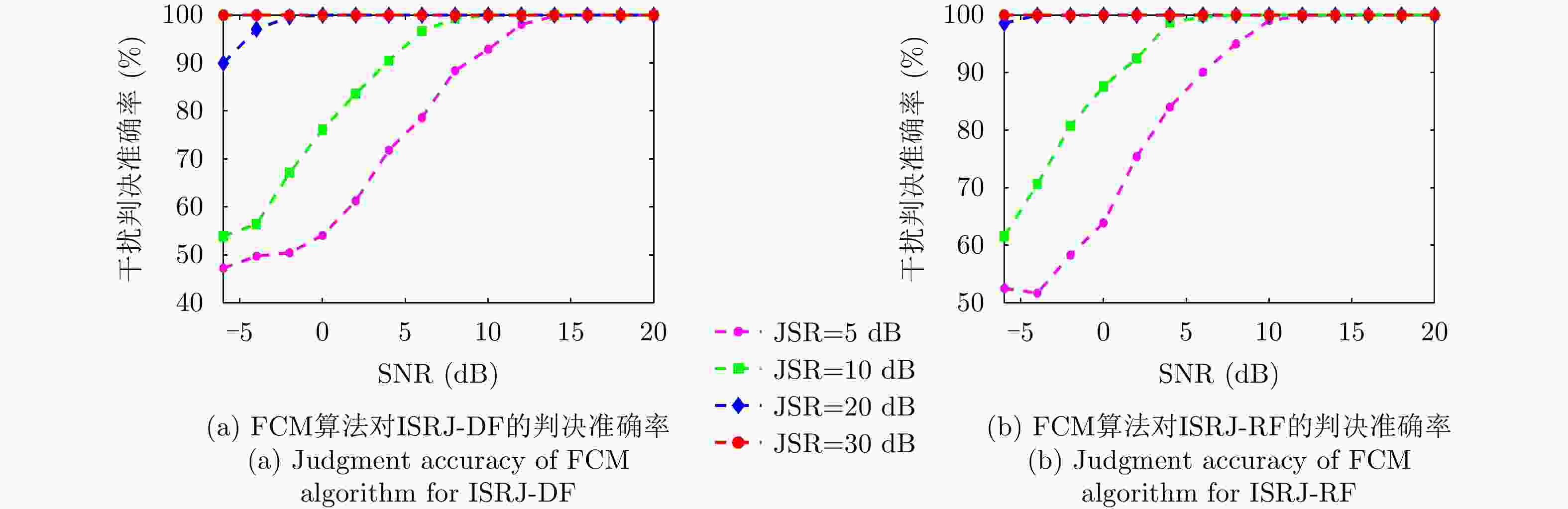
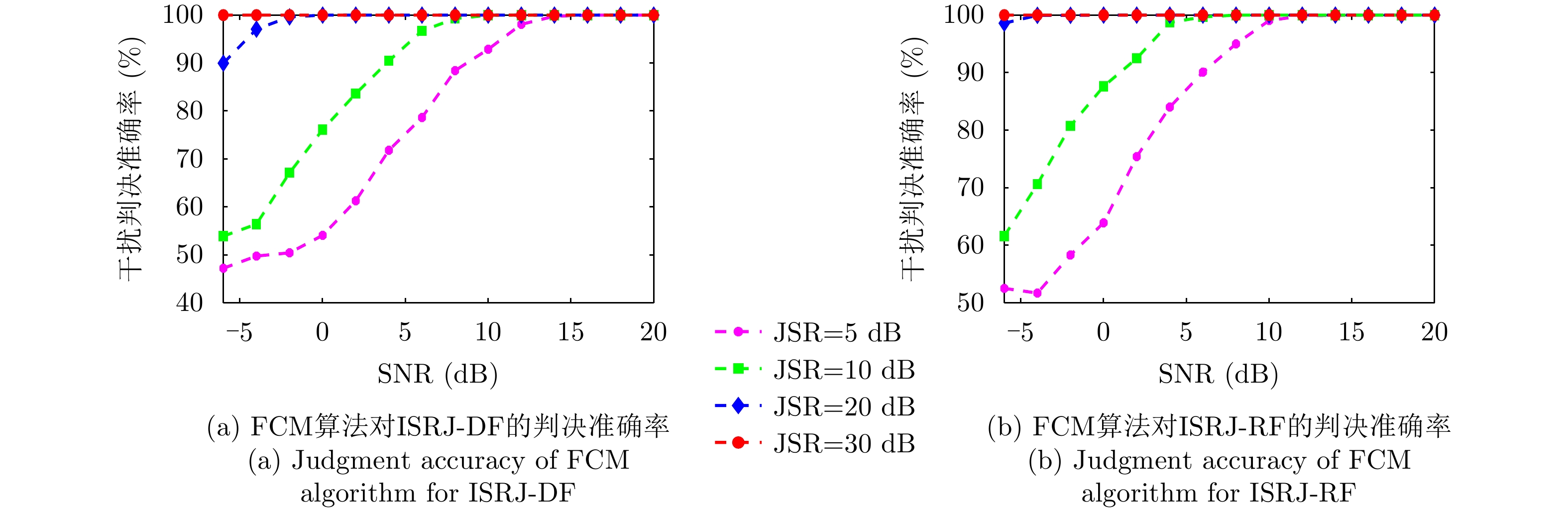
图 7 不同信噪比下FCM算法对ISRJ的判决准确率
Figure 7. Judgment accuracy of FCM algorithm for ISRJ under different SNR
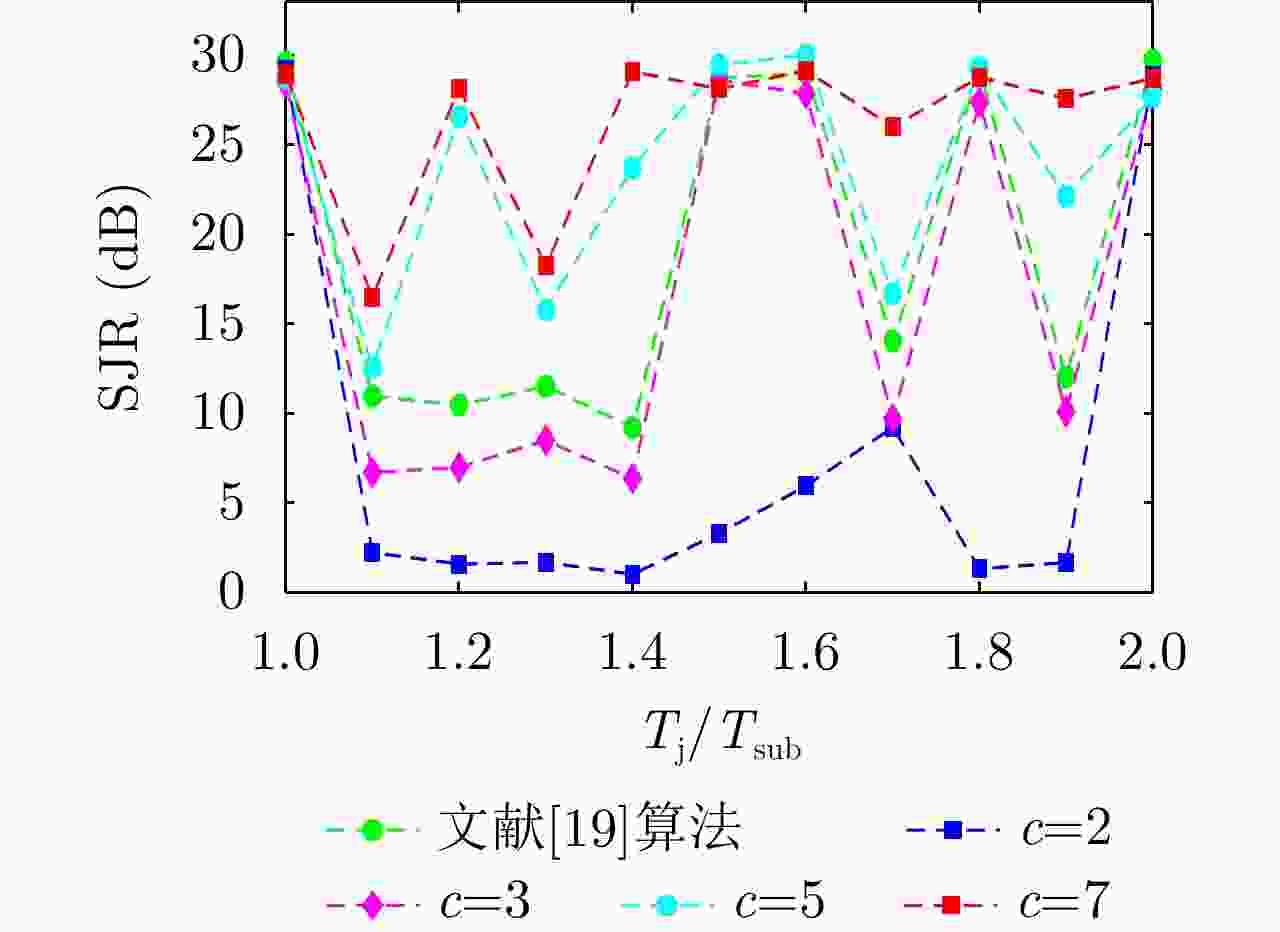
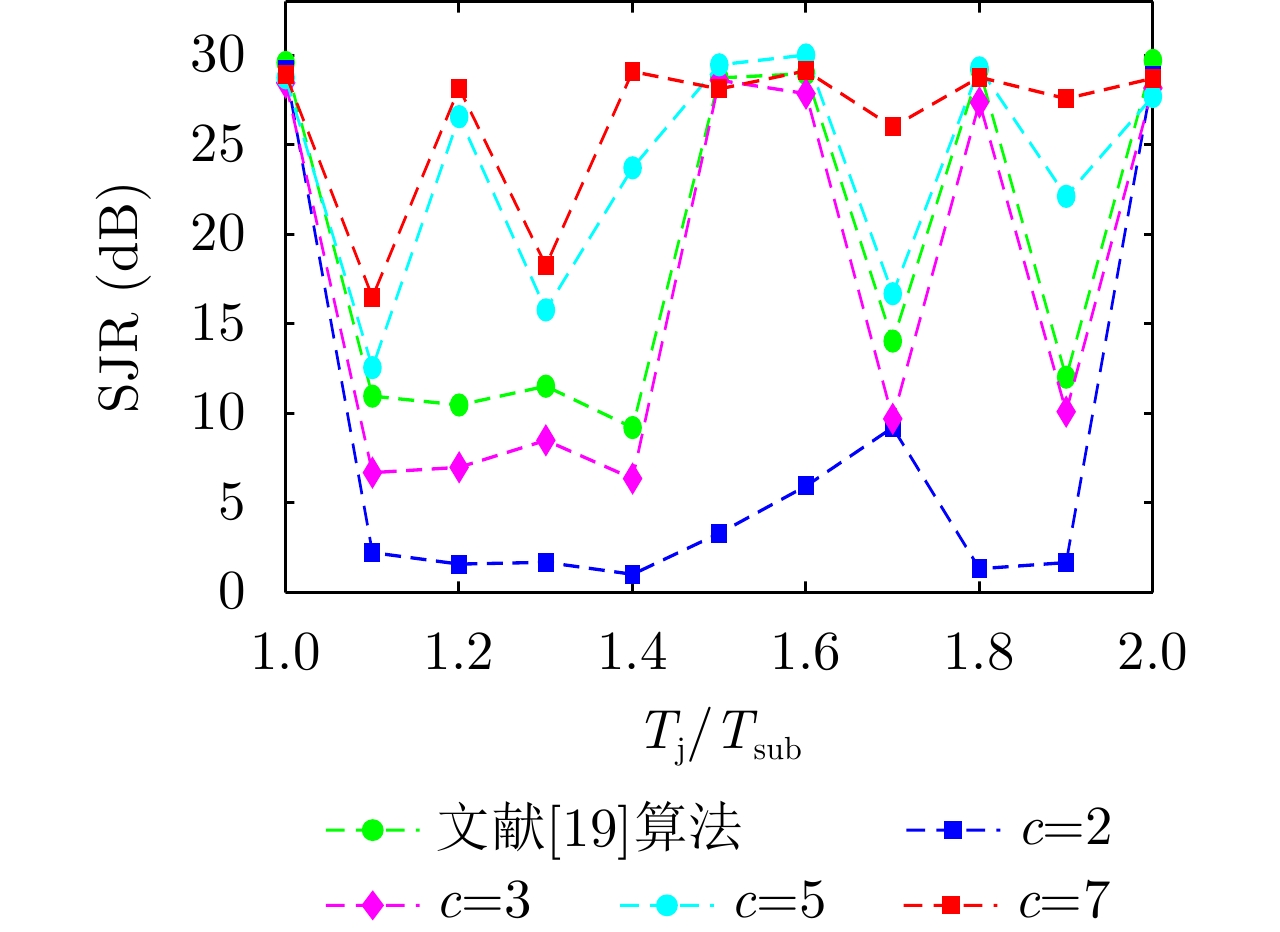
图 8 二维稀疏重构后不同算法的输出信干比
Figure 8. Output SJR of different methods after 2-D sparse reconstruction
表 1 雷达参数
Table 1. Radar parameters
参数 数值 参数 数值 N 64 K 10 M 100 f0 14 GHz $\Delta $f 12 MHz $\Delta F $ 40 MHz Tsub 4 µs Bsub 4 MHz PRT 100 µs  下载: 导出CSV
下载: 导出CSV
-
[1] ZHANG Yu, JIU Bo, WANG Penghui, et al. An end-to-end anti-jamming target detection method based on CNN[J]. IEEE Sensors Journal, 2021, 21(19): 21817–21828. doi: 10.1109/JSEN.2021.3103042 [2] 殷加鹏, 李健兵, 庞晨, 等. 一种极化-多普勒气象雷达的射频干扰滤波方法[J]. 雷达学报, 2021, 10(6): 905–918. doi: 10.12000/JR21102YIN Jiapeng, LI Jianbing, PANG Chen, et al. A radio frequency interference mitigation method for polarimetric doppler weather radars[J]. Journal of Radars, 2021, 10(6): 905–918. doi: 10.12000/JR21102 [3] 黄大通, 邢世其, 刘业民, 等. 基于噪声卷积调制的SAR虚假信号生成新方法[J]. 雷达学报, 2020, 9(5): 898–907. doi: 10.12000/JR20094HUANG Datong, XING Shiqi, LIU Yemin, et al. Fake SAR signal generation method based on noise convolution modulation[J]. Journal of Radars, 2020, 9(5): 898–907. doi: 10.12000/JR20094 [4] WEN Cai, PENG Jinye, ZHOU Yan, et al. Enhanced three-dimensional joint domain localized STAP for airborne FDA-MIMO radar under dense false-target jamming scenario[J]. IEEE Sensors Journal, 2018, 18(10): 4154–4166. doi: 10.1109/JSEN.2018.2820905 [5] 万显荣, 吕敏, 谢德强, 等. 基于信号结构特点的外源雷达干扰方法研究[J]. 雷达学报, 2020, 9(6): 987–997. doi: 10.12000/JR20124WAN Xianrong, LV Min, XIE Deqiang, et al. Jamming method of passive radar systems based on characteristics of signal structure[J]. Journal of Radars, 2020, 9(6): 987–997. doi: 10.12000/JR20124 [6] SUN Qingyang, SHU Ting, YU K B, et al. A novel deceptive jamming method against two-channel SAR-GMTI based on two jammers[J]. IEEE Sensors Journal, 2019, 19(14): 5600–5610. doi: 10.1109/JSEN.2019.2908030 [7] LAN Lan, LIAO Guisheng, XU Jingwei, et al. Suppression approach to main-beam deceptive jamming in FDA-MIMO radar using nonhomogeneous sample detection[J]. IEEE Access, 2018, 6: 34582–34597. doi: 10.1109/ACCESS.2018.2850816 [8] LU Xingyu, ZHAO Yujiu, YANG Jianhao, et al. An efficient method for single-channel SAR target reconstruction under severe deceptive jamming[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 17(2): 237–241. doi: 10.1109/LGRS.2019.2918838 [9] 黄岩, 赵博, 陶明亮, 等. 合成孔径雷达抗干扰技术综述[J]. 雷达学报, 2020, 9(1): 86–106. doi: 10.12000/JR19113HUANG Yan, ZHAO Bo, TAO Mingliang, et al. Review of synthetic aperture radar interference suppression[J]. Journal of Radars, 2020, 9(1): 86–106. doi: 10.12000/JR19113 [10] LI Yuntao, JIA Xin, CHEN Yongguang, et al. Frequency agility MIMO-SAR imaging and anti-deception jamming performance[C]. The 31th URSI General Assembly and Scientific Symposium, Beijing, 2014: 1–4. [11] 于海波, 李晓, 李倩, 等. 脉间随机捷变频脉冲多普勒引信技术[J]. 航空兵器, 2021, 28(1): 50–54. doi: 10.12132/ISSN.1673-5048.2019.0135YU Haibo, LI Xiao, LI Qian, et al. Pulse doppler fuze based on pulse-to-pulse random frequency agility technology[J]. Aero Weaponry, 2021, 28(1): 50–54. doi: 10.12132/ISSN.1673-5048.2019.0135 [12] HUANG Tianyao, LIU Yimin, XU Xingyu, et al. Analysis of frequency agile radar via compressed sensing[J]. IEEE Transactions on Signal Processing, 2018, 66(23): 6228–6240. doi: 10.1109/TSP.2018.2876301 [13] 董淑仙, 全英汇, 陈侠达, 等. 基于捷变频联合数学形态学的干扰抑制算法[J]. 系统工程与电子技术, 2020, 42(7): 1491–1498. doi: 10.3969/j.issn.1001-506X.2020.07.09DONG Shuxian, QUAN Yinghui, CHEN Xiada, et al. Interference suppression algorithm based on frequency agility combined with mathematical morphology[J]. Systems Engineering and Electronics, 2020, 42(7): 1491–1498. doi: 10.3969/j.issn.1001-506X.2020.07.09 [14] 王雪松, 刘建成, 张文明, 等. 间歇采样转发干扰的数学原理[J]. 中国科学 E辑:信息科学, 2006, 36(8): 891–901. doi: 10.3969/j.issn.1674-7259.2006.08.007WANG Xuesong, LIU Jiancheng, ZHANG Wenming, et al. Mathematic principles of interrupted-sampling repeater jamming (ISRJ)[J]. Science in China Series F:Information Sciences, 2006, 36(8): 891–901. doi: 10.3969/j.issn.1674-7259.2006.08.007 [15] WU Wenzhen, ZOU Jiangwei, CHEN Jian, et al. False-target recognition against interrupted-sampling repeater jamming based on integration decomposition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2979–2991. doi: 10.1109/TAES.2021.3068443 [16] 周超, 刘泉华, 胡程. 间歇采样转发式干扰的时频域辨识与抑制[J]. 雷达学报, 2019, 8(1): 100–106. doi: 10.12000/JR18080ZHOU Chao, LIU Quanhua, and HU Cheng. Time-frequency analysis techniques for recognition and suppression of interrupted sampling repeater jamming[J]. Journal of Radars, 2019, 8(1): 100–106. doi: 10.12000/JR18080 [17] 杨少奇, 田波, 周瑞钊. 利用时频分析的间歇采样干扰对抗方法[J]. 信号处理, 2016, 32(10): 1244–1251. doi: 10.16798/j.issn.1003-0530.2016.10.14YANG Shaoqi, TIAN Bo, and ZHOU Ruizhao. ECCM against interrupted sampling repeater jamming based on time-frequency analysis[J]. Journal of Signal Processing, 2016, 32(10): 1244–1251. doi: 10.16798/j.issn.1003-0530.2016.10.14 [18] 张建中, 穆贺强, 文树梁, 等. 基于脉内步进LFM波形的抗间歇采样转发干扰方法[J]. 系统工程与电子技术, 2019, 41(5): 1013–1020. doi: 10.3969/j.issn.1001-506X.2019.05.12ZHANG Jianzhong, MU Heqiang, WEN Shuliang, et al. Anti interrupted-sampling repeater jamming method based on stepped LFM waveform[J]. Systems Engineering and Electronics, 2019, 41(5): 1013–1020. doi: 10.3969/j.issn.1001-506X.2019.05.12 [19] 张建中, 穆贺强, 文树梁, 等. 基于脉内LFM-Costas频率步进的抗间歇采样干扰方法[J]. 系统工程与电子技术, 2019, 41(10): 2170–2177. doi: 10.3969/j.issn.1001-506X.2019.10.03ZHANG Jianzhong, MU Heqiang, WEN Shuliang, et al. Anti-intermittent sampling jamming method based on intra-pulse LFM-Costas frequency stepping[J]. Systems Engineering and Electronics, 2019, 41(10): 2170–2177. doi: 10.3969/j.issn.1001-506X.2019.10.03 [20] ZHAO Feng, TIAN Min, XIE Wen, et al. A new parallel dual-channel fully convolutional network via semi-supervised FCM for PolSAR image classification[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 4493–4505. doi: 10.1109/JSTARS.2020.3014966 [21] 黄平平, 任慧芳, 谭维贤, 等. 基于地基雷达图像的无监督变化检测[J]. 雷达学报, 2020, 9(3): 514–524. doi: 10.12000/JR20004HUANG Pingping, REN Huifang, TAN Weixian, et al. Unsupervised change detection using ground-based radar image[J]. Journal of Radars, 2020, 9(3): 514–524. doi: 10.12000/JR20004 [22] GAO Bo and WANG Jun. Multi-objective fuzzy clustering for synthetic aperture radar imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(11): 2341–2345. doi: 10.1109/LGRS.2015.2477500 [23] LI Yuhan, HUANG Tianyao, XU Xingyu, et al. Phase transitions in frequency agile radar using compressed sensing[J]. IEEE Transactions on Signal Processing, 2021, 69: 4801–4818. doi: 10.1109/TSP.2021.3099629 [24] QUAN Yinghui, WU Yaojun, LI Yachao, et al. Range Doppler reconstruction for frequency agile and PRF-jittering radar[J]. IET Radar, Sonar & Navigation, 2018, 12(3): 348–352. doi: 10.1049/iet-rsn.2017.0421 [25] QUAN Yinghui, LI Yachao, WU Yaojun, et al. Moving target detection for frequency agility radar by sparse reconstruction[J]. Review of Scientific Instruments, 2016, 87(9): 094703. doi: 10.1063/1.4962700 -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

