
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 极地冰盖特殊的热交换属性和庞大的含水量,使其成为全球气候变化的“指示器”和“放大器”。由于特殊的地理位置及严峻的气候环境,目前对极地冰盖的立体探测及认识仍旧匮乏。穿冰雷达具备强穿透性和高精度测距能力,成为冰盖立体层析探测的最佳选择,促进了极地科学的快速发展。受制于低频电磁波跨冰冻圈层传播的复杂性和雷达作用距离的大幅增加,迄今为止,利用天基平台实现穿冰探测依然是对地遥感的空白领域。该文针对天基穿冰雷达系统的科学需求和面临的特殊问题展开讨论,分析了天基穿冰系统面临的3大问题:传输衰减、积雪杂波干扰和垂直航迹向分辨率恶化;结合现有研究成果和技术发展趋势,分析了利用微小卫星平台进行分布式编队实现天基穿冰探测的可行性,论证了分布式穿冰雷达关键指标,指出了天基穿冰雷达未来发展亟需解决的关键技术难题,探索实现百米空间分辨率、季节尺度重访的天基穿冰雷达实施方案。Abstract: Owing to the enormous amount of frozen water and the particularity of heat exchange, polar ice sheets act as an important indicator and amplifier of global climate change. However, the detection and cognition of the tomographic structure of polar ice sheets remain insufficient due to the special geographical location and harsh weather. Benefit from the advantage of strong penetrability and high-precision range measurement, the ice sounding radar is an optimal instrument for tomographic detection of polar ice sheets, which significantly promotes the development of polar science. Nevertheless, existing radar satellites still cannot detect ice beds in depth because of the complex low-frequency signal propagation in ice and an extremely long operating distance. This study focuses on the scientific objectives (spatial resolution: 100 m and revisit time: 3 months) and presents an in-depth analysis of the key problems of orbital ice sounding radar, including transmission attenuation, firn clutter, and cross-track resolution deterioration. With reference to the current state and trend of radar satellite technology, we proved the feasibility of the application of distributed Synthetic Aperture Radar (SAR) on the microsatellite platform for ice bed detection, identified the key parameters of distributed SAR and the technical challenges of orbital radar sounding system for polar ice sheet tomographic observation, and further explored the implementation scheme.
-
Key words:
- Orbital ice sounding radar /
- Tomography /
- Distributed radar /
- Polar ice sheets /
- Global climate change
-
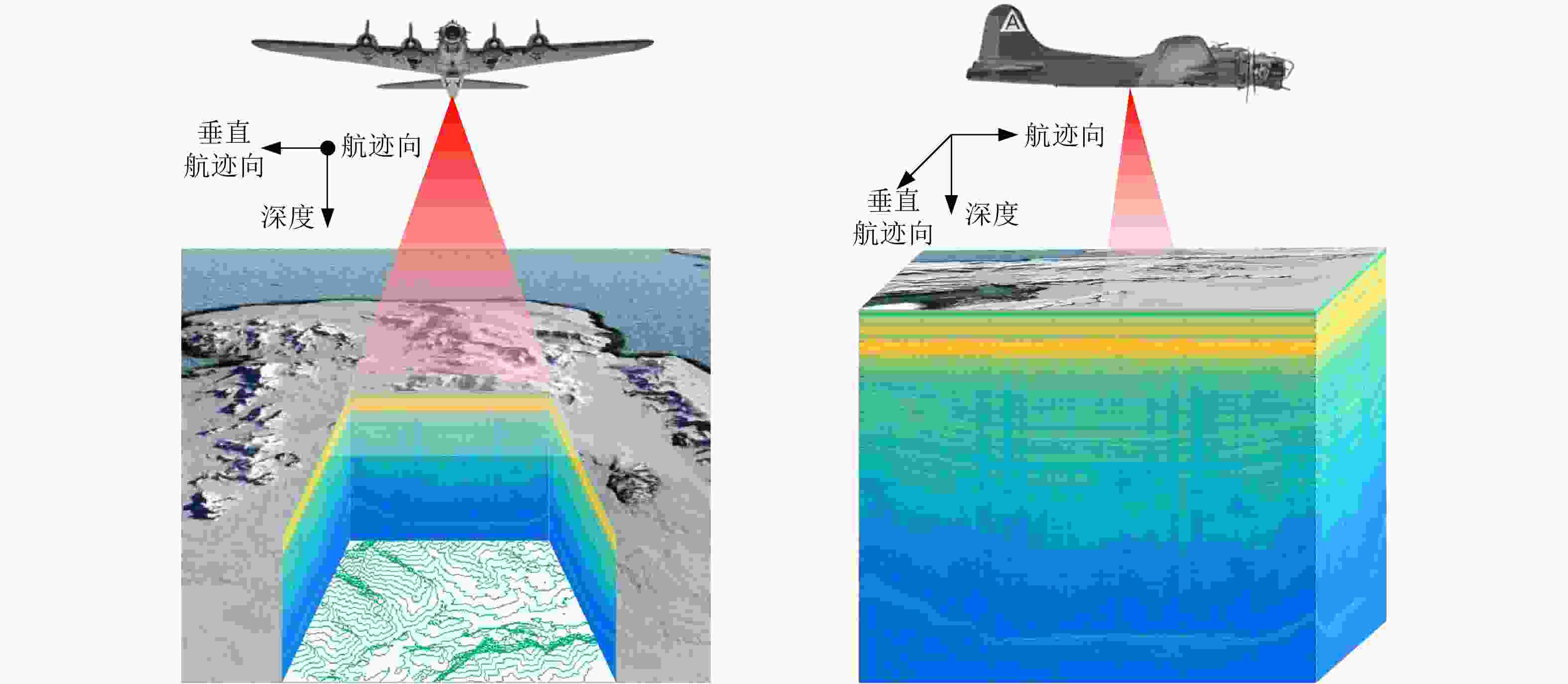
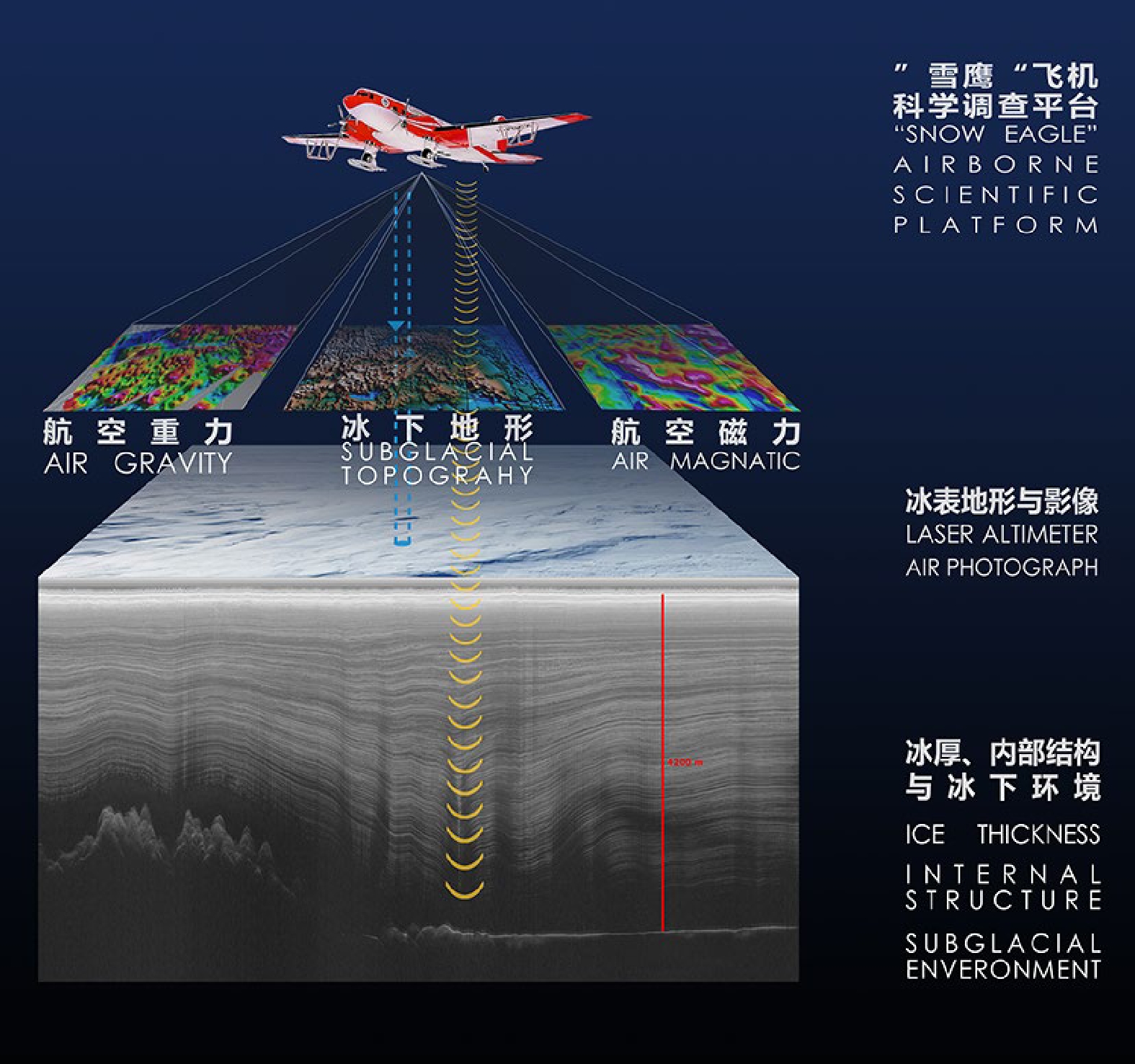
图 1 机载穿冰雷达观测示意图
Figure 1. Schematic diagram of airborne ice sounding radar observation
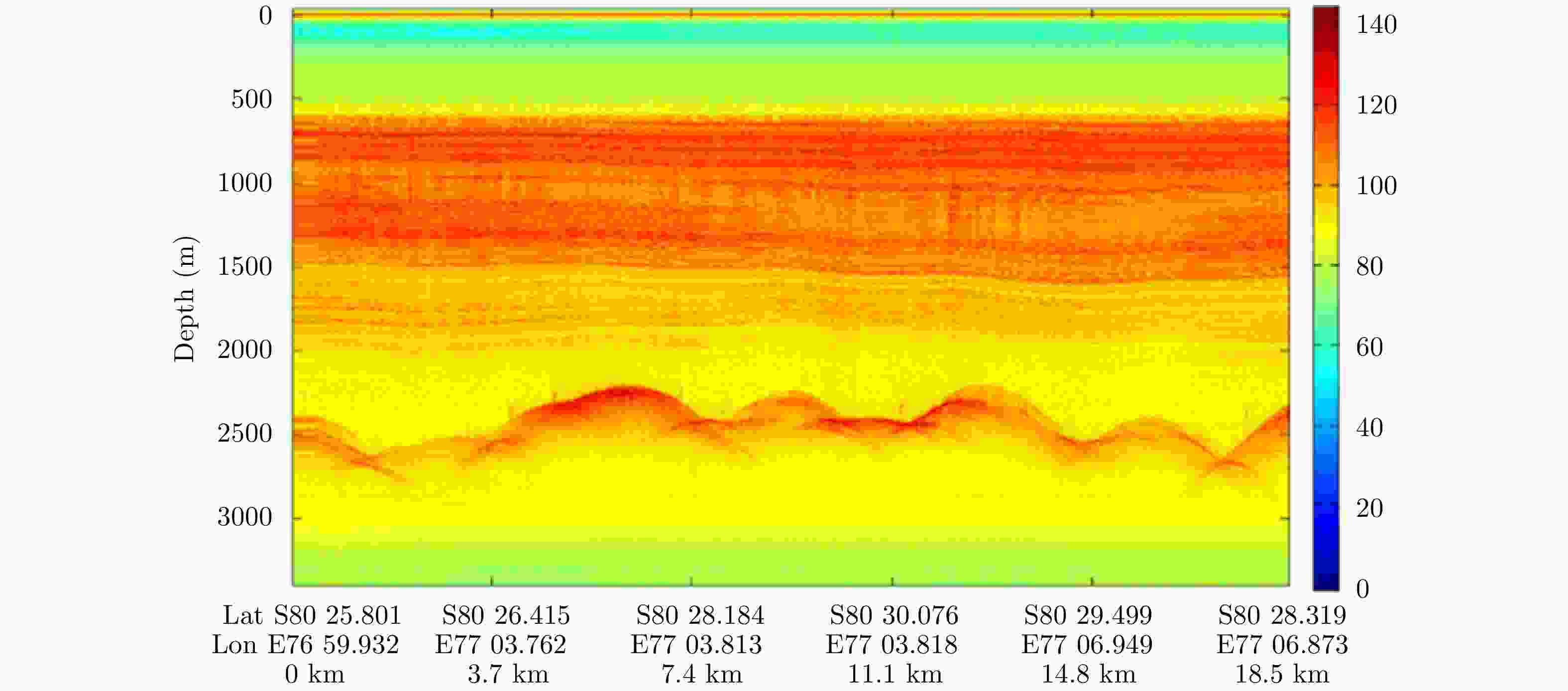
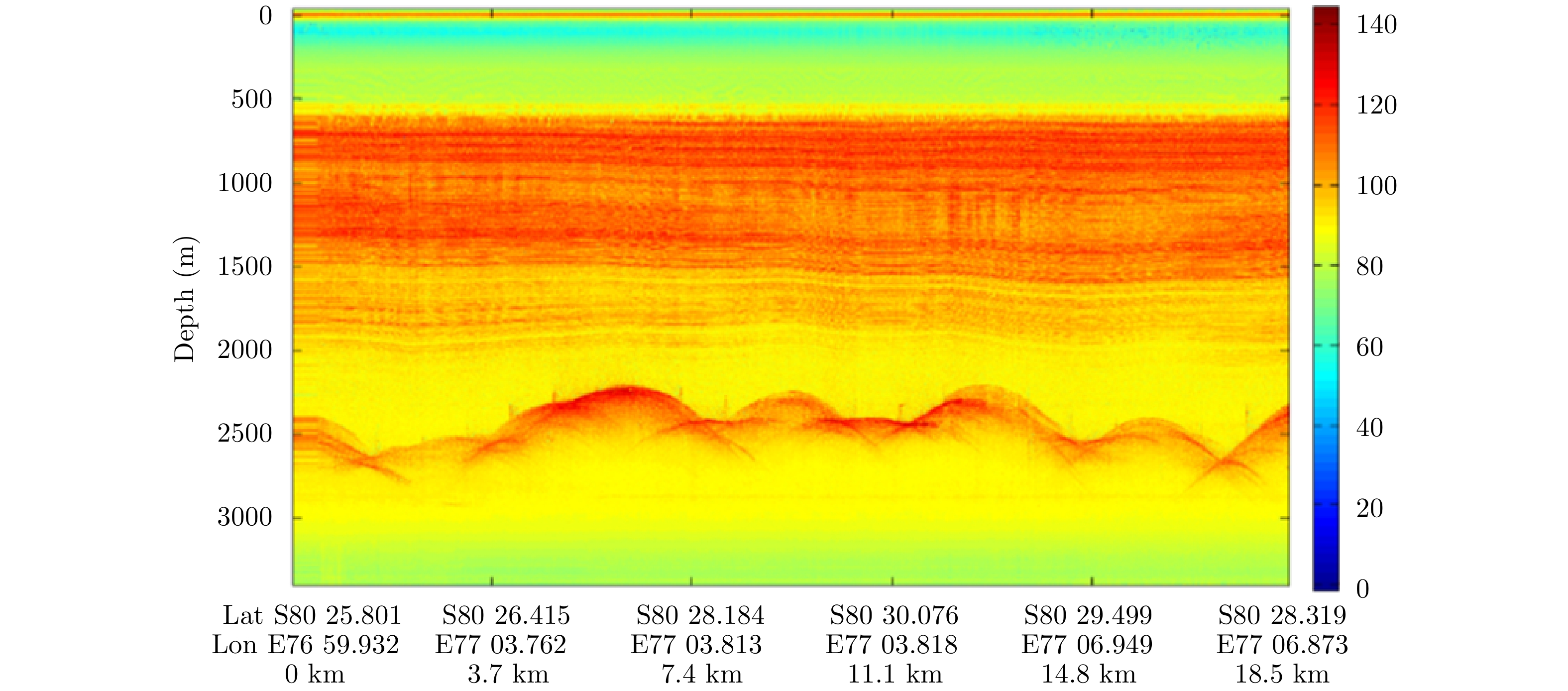
图 2 南极冰盖层析图像(中科院电子所穿冰雷达系统)
Figure 2. A tomographic image of the Antarctic ice sheet obtained by the ice sounding radar developed by the Chinese Academy of Sciences

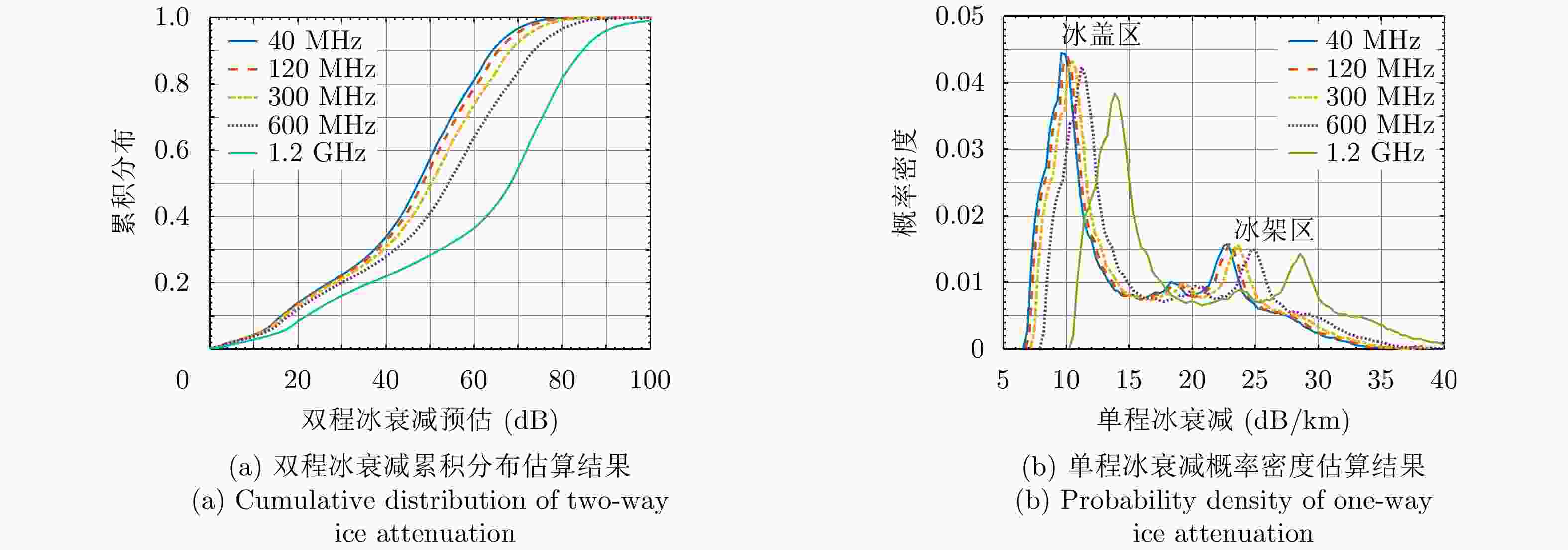
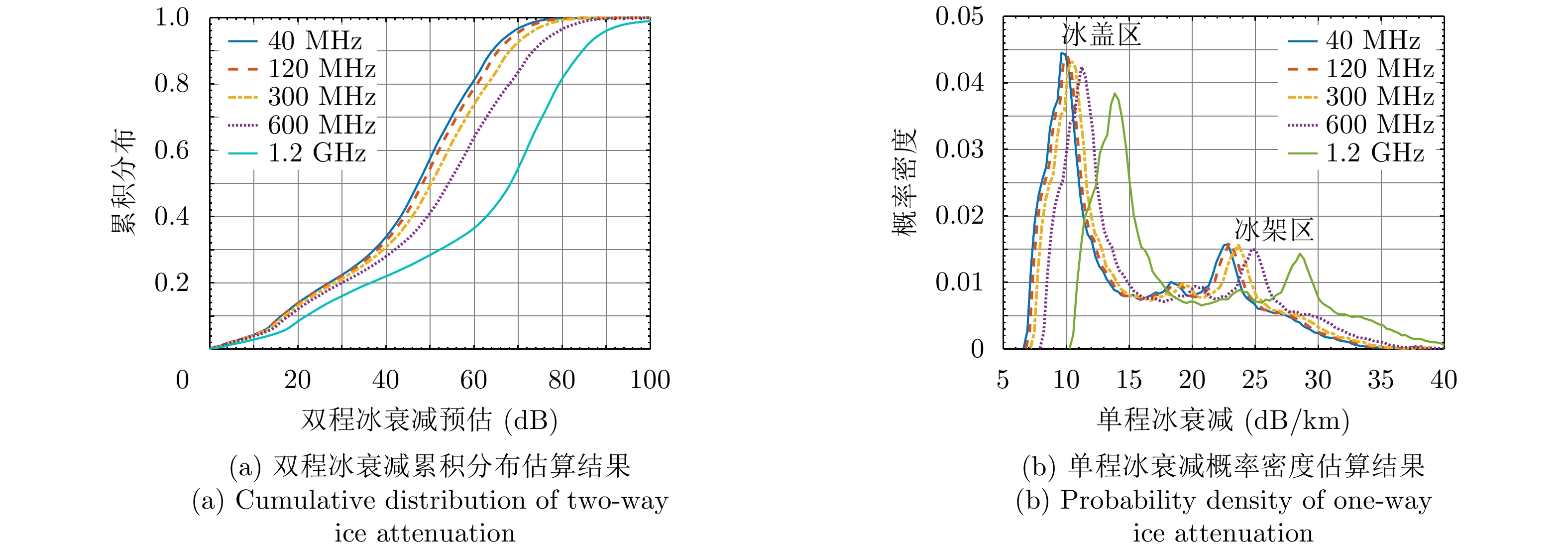
图 8 不同频率下南极冰盖冰衰减估算结果
Figure 8. Ice attenuation estimations of the Antarctic ice sheet with different frequencies
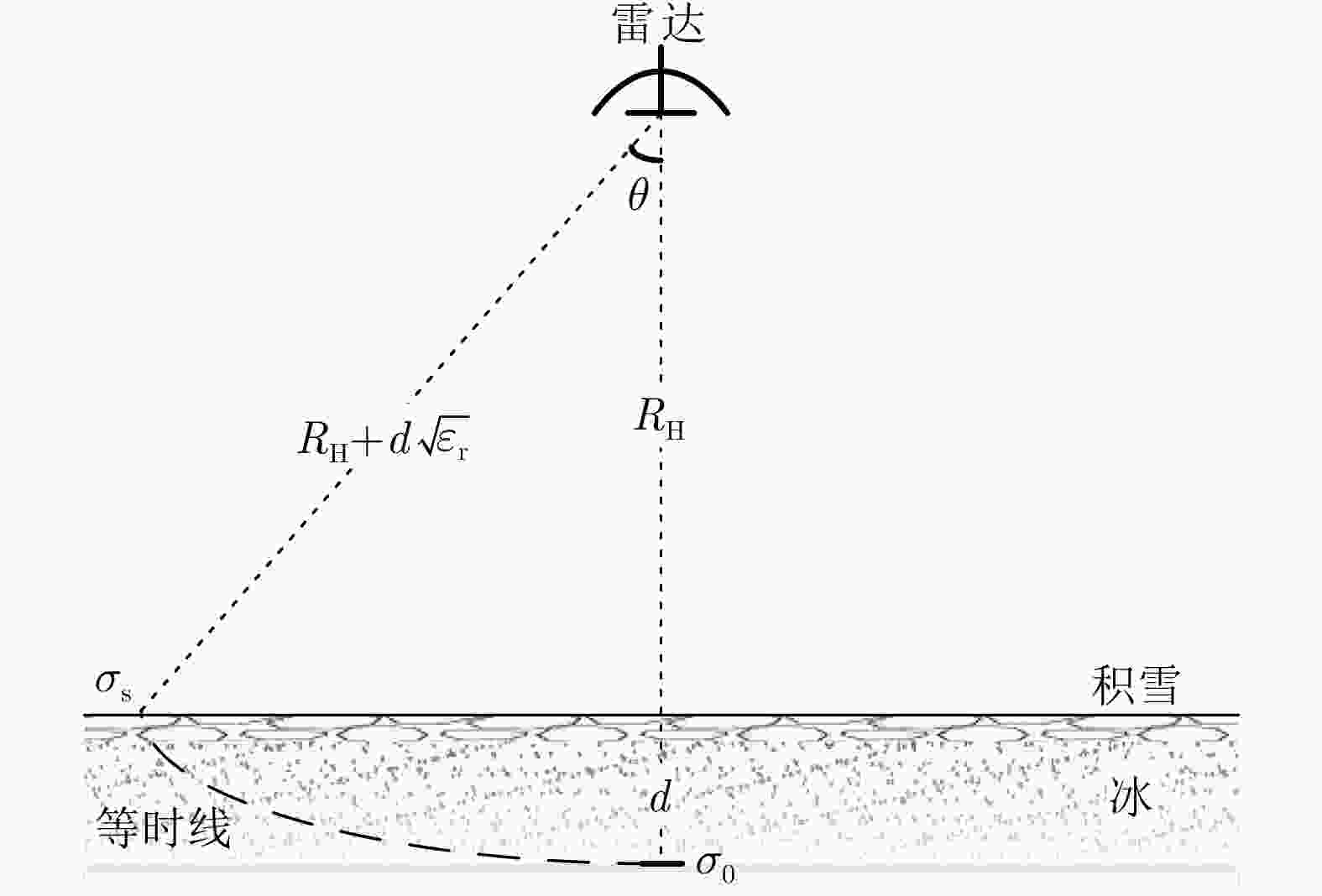
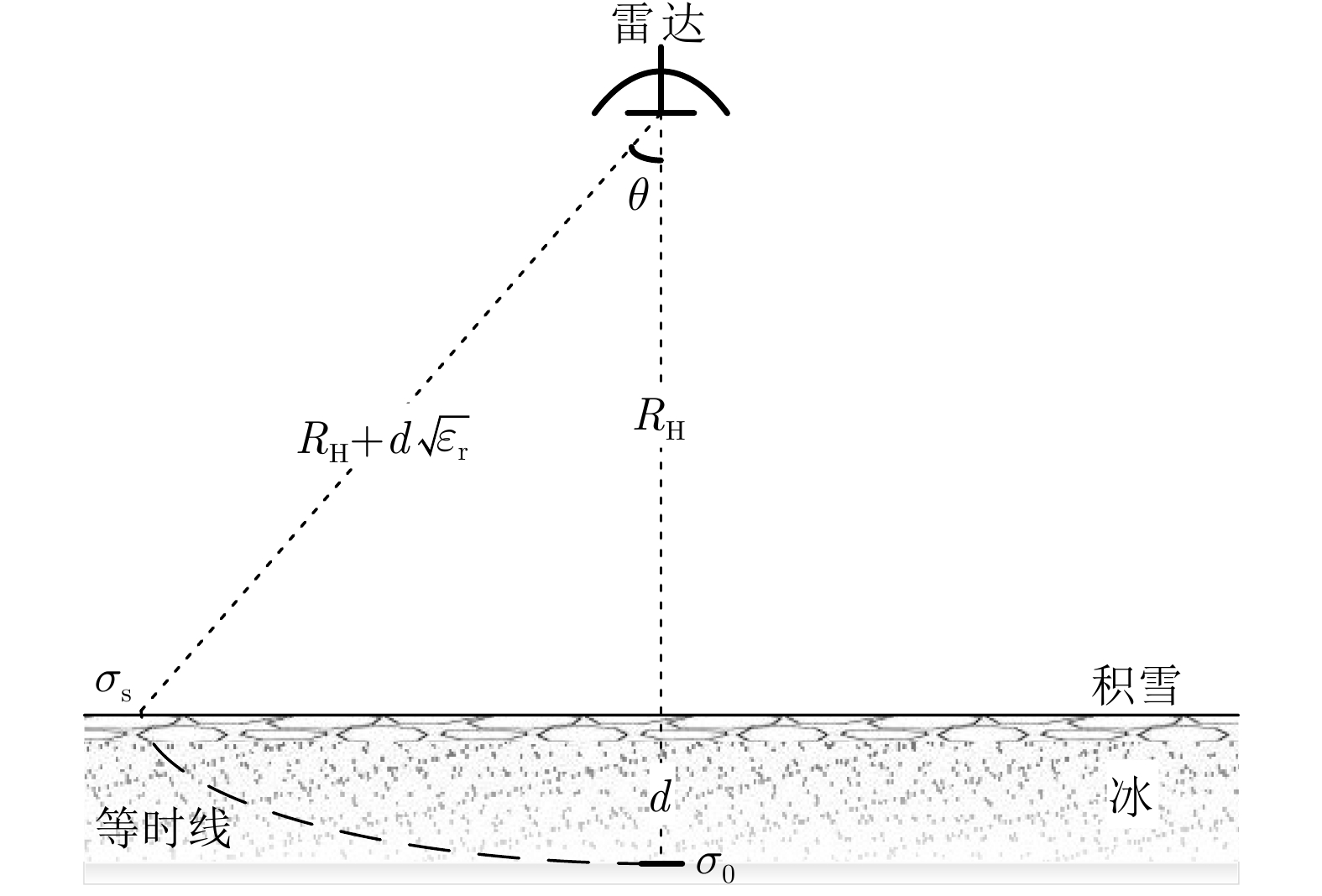
图 9 穿冰雷达积雪杂波干扰示意图
Figure 9. Schematic diagram of snow clutter jamming for ice sounding radar
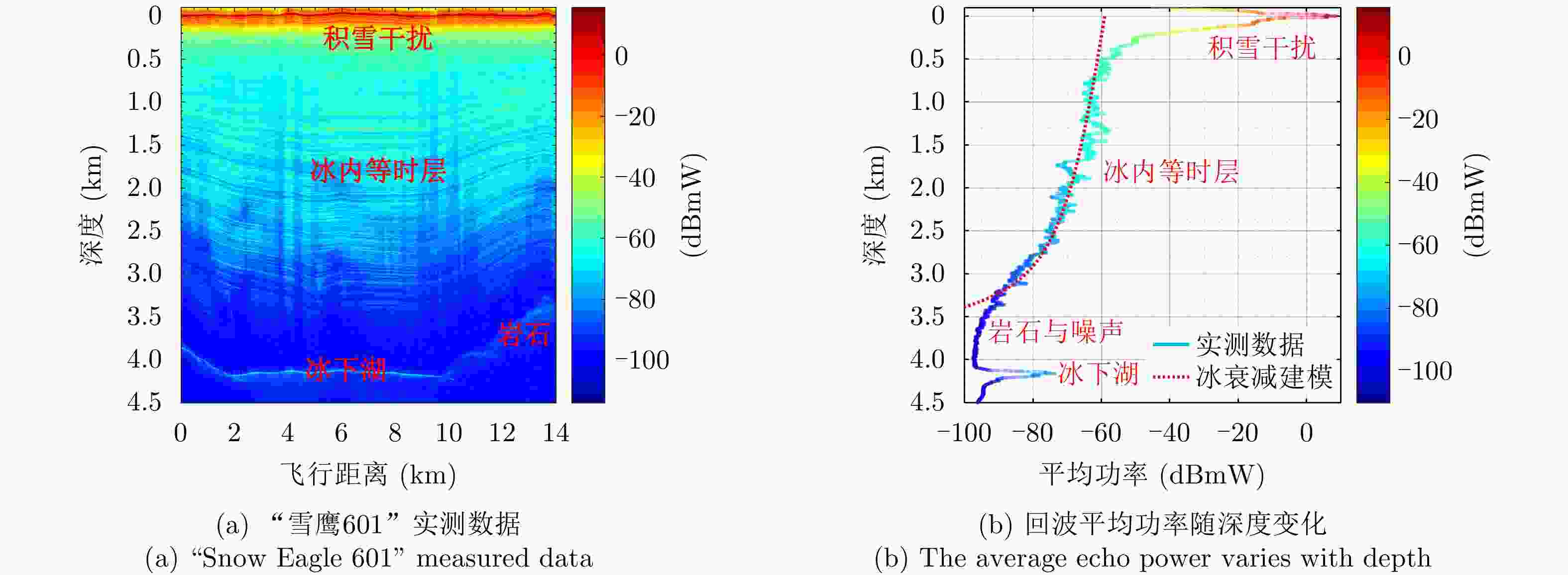
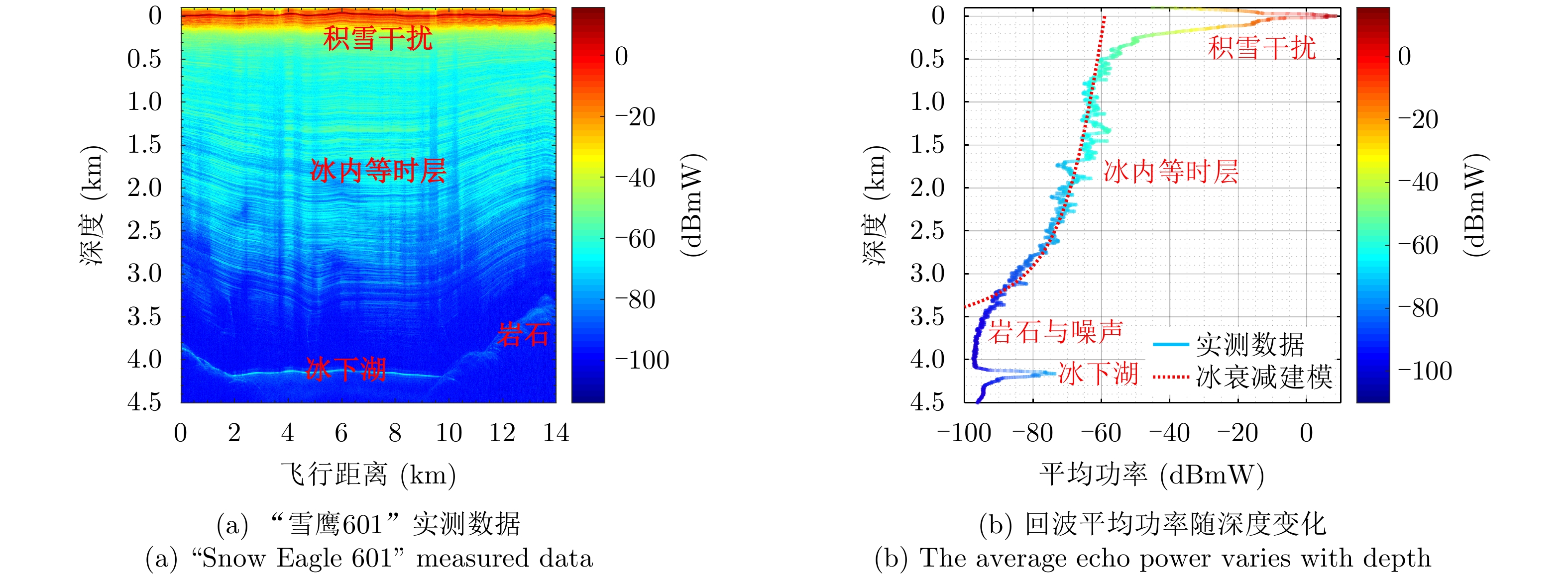
图 10 “雪鹰601”穿冰雷达积雪杂波干扰示意图
Figure 10. Snow clutter interference of “snow Eagle 601” ice sounding radar

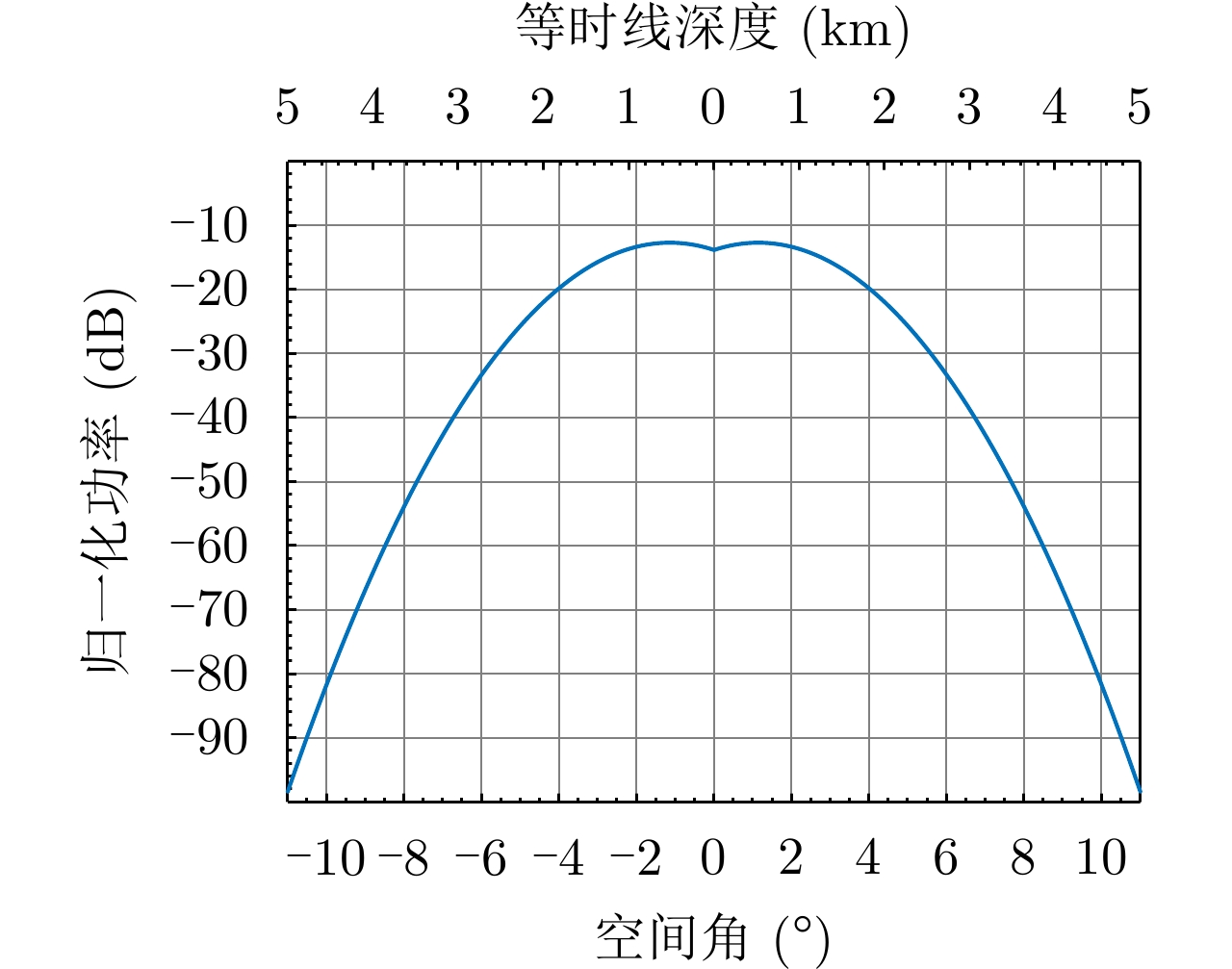
图 11 VHF频段积雪杂波强度空间分布特性(基于“雪鹰601”实测数据)
Figure 11. Spatial distribution characteristics of snow clutter intensity based on “snow Eagle 601” data
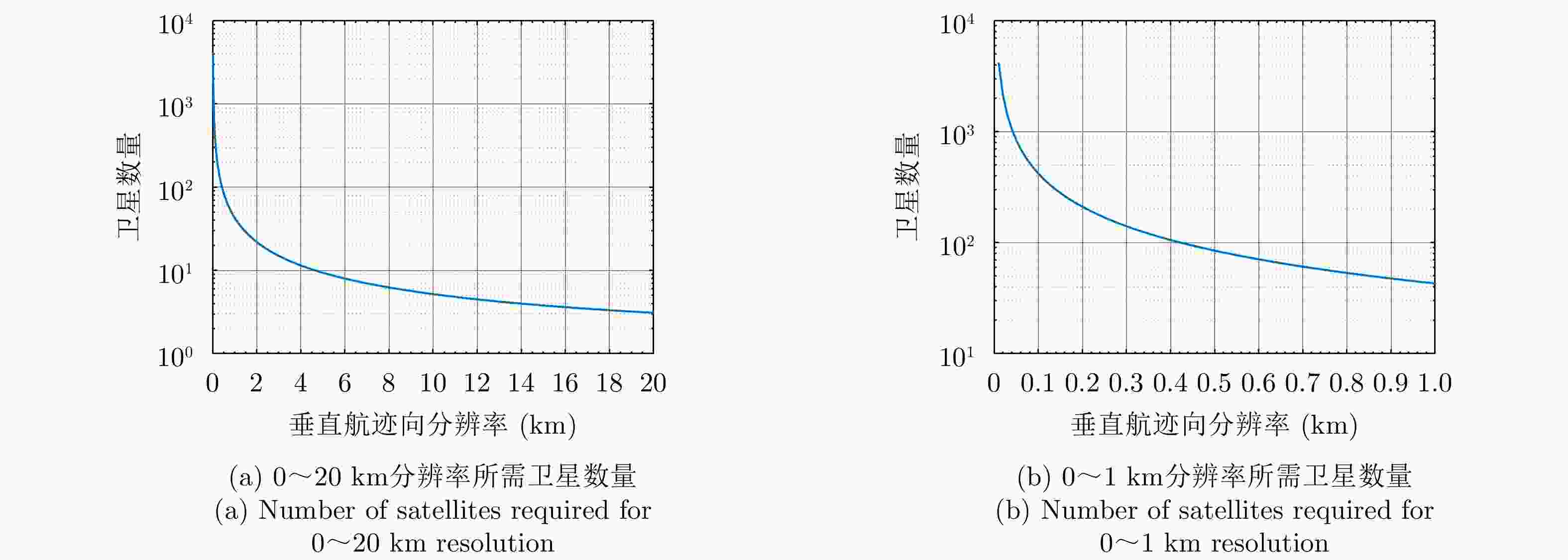
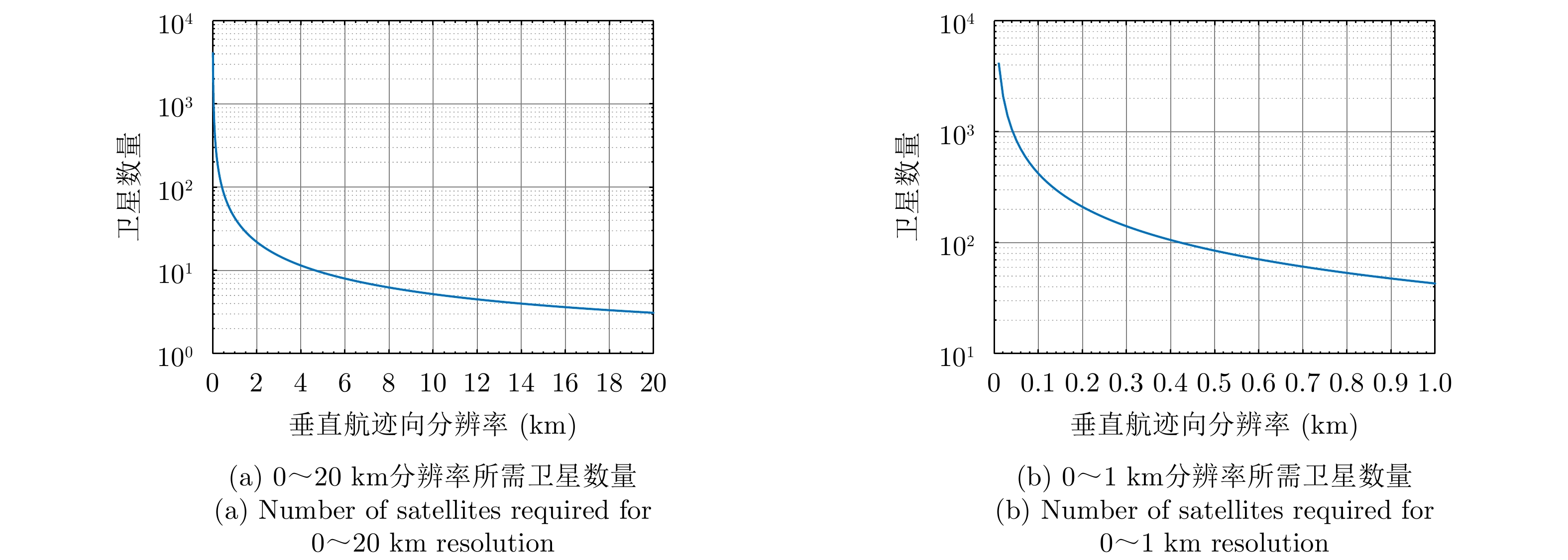
图 17 垂直航迹向分辨率与卫星数量
Figure 17. Cross-track direction resolution with the number of satellites
测量参数 相关科学目标 要求精度 空间分辨率(m) 传感器 冰厚 1, 2 5 m 100(普查)、10(详查) 宽带穿冰雷达 冰底消融/冻结 3 95%可信度 100 单基/双基SAR 底部水层及厚度 3, 4 50%以上准确度、4 mm~0.5 m 100(普查)、10(详查) 单基/双基SAR 内部层 5, 2, 6 10 cm(浅部)、5 m(深部) 100(普查)、10(详查) 宽带穿冰雷达 冰下地形 2 5 m 100(普查)、10(详查) 宽带穿冰雷达 冰面地形 2 0.5 m 100(普查)、10(详查) InSAR,雷达/激光高度计,GPS 冰流速度 1, 2, 6 5%(速度)、5°(方向) 500 InSAR 注:科学目标:1. 物质通量;2. 应力估计;3. 底部边界条件;4. 底部剪应力;5. 积累率;6. 冰流历史  下载: 导出CSV
下载: 导出CSV
温度(K) $A (\times {10^4})$ $B (\times {10^5})$ $C$ 190 0.005 1.537 1.175 200 0.010 1.747 1.168 220 0.031 2.469 1.129 240 0.268 3.495 1.088 248 0.635 4.006 1.073 253 1.059 4.380 1.062 258 1.728 4.696 1.056 263 2.769 5.277 1.038 265 3.326 5.646 1.024
下载: 导出CSV
温度(K) $a$ $b$ 263 4.283 –0.337 253 4.875 –0.423 243 5.279 –0.480 233 4.996 –0.456
下载: 导出CSV
表 5 天基与机载穿冰雷达相关参数对比
Table 5. The paramenters of spaceborne and airborne ice sounding radars
参数 天基系统 机载系统 差异 飞行高度 500 km 500 m / 载频波长 5 m 5 m / 传播衰减 / / 90 dB 积雪杂波干扰深度 冰底以下 280 m 垂直航迹向分辨率 2.2 km 180 m
下载: 导出CSV
-
[1] PÖRTNER H O, ROBERTS D C, MASSON-DELMOTTE V, et al. IPCC special report on the ocean and cryosphere in a changing climate[R/OL]. https://www.ipcc.ch/site/assets/uploads/sites/3/2019/12/SROCC_FullReport_FINAL.pdf, 2019. [2] https://www.nsf.gov/geo/opp/antarct/science/icesheet.jsp. [3] FARINOTTI D, HUSS M, FÜRST J J, et al. A consensus estimate for the ice thickness distribution of all glaciers on Earth[J]. Nature Geoscience, 2019, 12(3): 168–173. doi: 10.1038/s41561-019-0300-3 [4] LIU Yan, MOORE J C, CHENG Xiao, et al. Ocean-driven thinning enhances iceberg calving and retreat of Antarctic ice shelves[J]. Proceedings of the National Academy of Sciences of the United States of America, 2015, 112(11): 3263–3268. doi: 10.1073/pnas.1415137112 [5] STOCKER T F, QIN D, PLATTNER G K, et al. Climate change 2013: The physical science basis[R]. 2014. doi: 10.1017/CBO9781107415324. [6] 车涛, 李新, 李新武, 等. 冰冻圈遥感: 助力“三极”大科学计划[J]. 中国科学院院刊, 2020, 35(4): 484–493. doi: 10.16418/j.issn.1000-3045.20200323001CHE Tao, LI Xin, LI Xinwu, et al. Developing cryospheric remote sensing, promoting scientific programme of earth’s three poles[J]. Bulletin of Chinese Academy of Sciences, 2020, 35(4): 484–493. doi: 10.16418/j.issn.1000-3045.20200323001 [7] 崔祥斌, 孙波, 张向培, 等. 极地冰盖冰雷达探测技术的发展综述[J]. 极地研究, 2009, 21(4): 322–335.CUI Xiangbin, SUN Bo, ZHANG Xiangpei, et al. A review of ice radar’s technical development in polar ice sheet investigation[J]. Chinese Journal of Polar Research, 2009, 21(4): 322–335. [8] VAUGHAN D G and ARTHERN R. Why is it hard to predict the future of ice sheets?[J]. Science, 2007, 315(5818): 1503–1504. doi: 10.1126/science.1141111 [9] IVINS E R. Ice sheet stability and sea level[J]. Science, 2009, 324(5929): 888–889. doi: 10.1126/science.1173958 [10] KENNICUTT M C, CHOWN S L, CASSANO J J, et al. Polar research: Six priorities for Antarctic science[J]. Nature, 2014, 512(7512): 23–25. doi: 10.1038/512023a [11] JOUGHIN I, SMITH B E, and MEDLEY B. Marine ice sheet collapse potentially under way for the Thwaites Glacier Basin, West Antarctica[J]. Science, 2014, 344(6185): 735–738. doi: 10.1126/science.1249055 [12] BELL R E, FERRACCIOLI F, CREYTS T T, et al. Widespread persistent thickening of the east Antarctic ice sheet by freezing from the base[J]. Science, 2011, 331(6024): 1592–1595. doi: 10.1126/science.1200109 [13] WAITE A H. Ice depth soundings with ultra-high frequency radio waves in the Arctic and Antarctic, and some observed over-ice altimeter errors[R]. Technical Report 2092, 1959. [14] EVANS S. Radio techniques for the measurement of ice thickness[J]. Polar Record, 1963, 11(73): 406–410. doi: 10.1017/S0032247400053523 [15] SIEGERT M J. On the origin, nature and uses of Antarctic ice-sheet radio-echo layering[J]. Progress in Physical Geography:Earth and Environment, 1999, 23(2): 159–179. doi: 10.1191/030913399671124903 [16] DREWRY D J. Antarctica: Glaciological and Geophysical Folio[M]. Cambridge, U.K.: Scott Polar Research Institute, University of Cambridge, 1983. ISBN: 0901021040. [17] CHUAH T S. Design and development of a coherent radar depth sounder for measurement of Greenland ice sheet thickness[R]. RSL Technical. Report 10470–5, 1997. https://cresis.ku.edu/sites/default/files/biblio/TechRpt151.pdf. [18] GOGINENI S, TAMMANA D, BRAATEN D, et al. Coherent radar ice thickness measurements over the Greenland ice sheet[J]. Journal of Geophysical Research, 200l, 106(D24): 33761–33772. [19] BAMBER J L, LAYBERRY R L, and GOGINENI S P. A new ice thickness and bed data set for the Greenland ice sheet: 1. Measurement, data reduction, and errors[J]. Journal of Geophysical Research, 2001, 106(D24): 33773–33780. doi: 10.1029/2001JD900054 [20] PADEN J, MOZAFFAR S, DUNSON D, et al. Multiband multistatic synthetic aperture radar for measuring ice sheet basal conditions[C]. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004: 139. [21] MATSUOKA K, FURUKAWA T, FUJITA S, et al. Crystal orientation fabrics within the Antarctic ice sheet revealed by a multipolarization plane and dual-frequency radar survey[J]. Journal of Geophysical Research, 2003, 108(B10): 2499. doi: 10.1029/2003JB002425 [22] STUDINGER M, KOENIG L, MARTIN S, et al. Operation icebridge: Using instrumented aircraft to bridge the observational gap between icesat and icesat-2[C]. 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, USA, 2010: 1918–1919. [23] 杨树瑚, 顾祈明, 张云, 等. 利用冰雷达诊断南极冰盖底部环境的研究综述[J]. 极地研究, 2016, 28(2): 277–286. doi: 10.13679/j.jdyj.2016.2.277YANG Shuhu, GU Qiming, ZHANG Yun, et al. A review of the use of ice penetrating radar to diagnose the subglacial environments[J]. Chinese Journal of Polar Research, 2016, 28(2): 277–286. doi: 10.13679/j.jdyj.2016.2.277 [24] WANG Bangbing, TIAN Gang, CUI Xiangbin, et al. The internal COF features in Dome A of Antarctica revealed by multi-polarization-plane RES[J]. Applied Geophysics, 2008, 5(3): 230–237. doi: 10.1007/s11770-008-0029-z [25] SUN Bo, SIEGERT M J, MUDD S M, et al. The Gamburtsev mountains and the origin and early evolution of the Antarctic ice sheet[J]. Nature, 2009, 459(7247): 690–693. doi: 10.1038/nature08024 [26] CUI Xiangbin, GREENBAUM J S, BEEM L H, et al. The first fixed-wing aircraft for Chinese Antarctic expeditions: Airframe, modifications, scientific instrumentation and applications[J]. Journal of Environmental and Engineering Geophysics, 2018, 23(1): 1–13. doi: 10.2113/JEEG23.1.1 [27] CUI Xiangbin, JEOFRY H, GREENBAUM J S, et al. Bed topography of princess Elizabeth Land in East Antarctica[J]. Earth System Science Data, 2020, 12(4): 2765–2774. doi: 10.5194/essd-12-2765-2020 [28] FRETWELL P, PRITCHARD H D, VAUGHAN D G, et al. Bedmap2: Improved ice bed, surface and thickness datasets for Antarctica[J]. The Cryosphere Discussions, 2012, 6: 4305–4361. doi: 10.5194/tcd-6-4305-2012 [29] MORLIGHEM M, RIGNOT E, BINDER T, et al. Deep glacial troughs and stabilizing ridges unveiled beneath the margins of the Antarctic ice sheet[J]. Nature Geoscience, 2020, 13(2): 132–137. doi: 10.1038/s41561-019-0510-8 [30] MACKIE E J, SCHROEDER D M, CAERS J, et al. Antarctic topographic realizations and geostatistical modeling used to map Subglacial Lakes[J]. Journal of Geophysical Research, 2020, 125(3): e2019JF005420. doi: 10.1029/2019JF005420 [31] GCOS. The global observing system for climate: Implementation needs (GCOS-200)[EB/OL]. https://library.wmo.int/doc_num.php?explnum_id=3417, 2016. [32] VERTENSTEIN M, CRAIG T, MIDDLETON A, et al. CESM 1.0. 4 user’s guide[R/OL]. http://www.cesm.ucar.edu/models/cesm1.0/cesm/cesm_doc_1_0_4/book1.html, 2012. [33] 万修全, 刘泽栋, 沈飙, 等. 地球系统模式CESM及其在高性能计算机上的配置应用实例[J]. 地球科学进展, 2014, 29(4): 482–491. doi: 10.11867/j.issn.1001-8166.2014.04.0482WAN Xiuquan, LIU Zedong, SHEN Biao, et al. Introduction to the community earth system model and application to high performance computing[J]. Advances in Earth Science, 2014, 29(4): 482–491. doi: 10.11867/j.issn.1001-8166.2014.04.0482 [34] 林岩銮, 王磊, 苏洁, 等. 全球气候系统中冰冻圈的模拟研究[M]. 北京: 科学出版社, 2019: 145–147.LIN Yanluan, WANG Lei, SU Jie, et al. Simulation of Cryosphere in Global Climate System[M]. Beijing: Science Press, 2019: 145–147. [35] GOGINENI S, PRESCOTT G, BRAATEN D, et al. Polar radar for ice sheet measurements[C]. 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 2003: 1607–1609. [36] https://globalcryospherewatch.org/satellites/overview.html. [37] https://europa.nasa.gov/spacecraft/instruments/reason/. [38] https://sci.esa.int/web/rosetta/-/35061-instruments?section=consert-comet-nucleus-sounding-experiment-by-radiowave-transmission. [39] ZOU Yongliao, ZHU Yan, BAI Yunfei, et al. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission[J]. Advances in Space Research, 2021, 67(2): 812–823. doi: 10.1016/j.asr.2020.11.005 [40] PICARDI G, BICCARI D, SEU R, et al. MARSIS: Mars advanced radar for subsurface and ionosphere sounding[R/OL]. https://sci.esa.int/documents/33745/35957/1567254616449-PicardiWeb.pdf, 2004. [41] SEU R, BICCARI D, OROSEI R, et al. SHARAD: The MRO 2005 shallow radar[J]. Planetary and Space Science, 2004, 52(1/3): 157–166. doi: 10.1016/j.pss.2003.08.024 [42] HEGGY E, ROSEN P A, BEATTY R, et al. Orbiting arid subsurface and ice sheet sounder (OASIS): Exploring desert aquifers and polar ice sheets and their role in current and paleo-climate evolution[C]. 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 2013: 3483–3486. [43] FREEMAN A, PI Xiaoqing, and HEGGY E. Radar sounding through the Earth's ionosphere at 45 MHz[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(10): 5833–5842. doi: 10.1109/TGRS.2017.2715838 [44] HEGGY E, ROSEN P A, BEATTY R, et al. Exploring desert aquifers and polar ice sheets and their responses to climate evolution: OASIS mission concept[C]. The 1st Springer Conference of the Arabian Journal of Geosciences, Tunisia, 2018: 7–10. [45] HEGGY E. Exploring deserts response to climate change from the orbiting arid subsurface and ice sheet sounder (OASIS)[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 655–656. [46] SANDER K F and REED G A L. Transmission and Propagation of Electromagnetic Waves[M]. Cambridge, UK: Cambridge University Press, 1986: 13–19. [47] MATSUOKA T, FUJITA S, and MAE S. Effect of temperature on dielectric properties of ice in the range 5–39 GHz[J]. Journal of Applied Physics, 1996, 80(10): 5884–5890. doi: 10.1063/1.363582 [48] MÄTZLER C and WEGMÜLLER U. Dielectric properties of freshwater ice at microwave frequencies[J]. Journal of Physics D:Applied Physics, 1987, 20(12): 1623–1630. doi: 10.1088/0022-3727/20/12/013 [49] CORR H, MOORE J C, and NICHOLLS K W. Radar absorption due to impurities in Antarctic ice[J]. Geophysical Research Letters, 1993, 20(11): 1071–1074. doi: 10.1029/93GL01395 [50] MATSUOKA K, MACGREGOR J A, and PATTYN F. Predicting radar attenuation within the Antarctic ice sheet[J]. Earth and Planetary Science Letters, 2012, 359/360: 173–183. doi: 10.1016/j.jpgl.2012.10.018 [51] PATTYN F. Antarctic subglacial conditions inferred from a hybrid ice sheet/ice stream model[J]. Earth and Planetary Science Letters, 2010, 295(3/4): 451–461. doi: 10.1016/j.jpgl.2010.04.025 [52] HINDMARSH R C A and LE MEUR E. Dynamical processes involved in the retreat of marine ice sheets[J]. Journal of Glaciology, 2001, 47(157): 271–282. doi: 10.3189/172756501781832269 [53] http://websrv.cs.umt.edu/isis/index.php/Data. [54] SCHROEDER D M, BIENERT N L, CULBERG R, et al. Glaciological constraints on link budgets for orbital radar sounding of Earth's ice sheets[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 647–650. [55] CULBERG R and SCHROEDER D M. Firn clutter constraints on the design and performance of orbital radar ice sounders[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(9): 6344–6361. doi: 10.1109/TGRS.2020.2976666 [56] ULABY F T and DOBSON M C. Handbook of Radar Scattering Statistics for Terrain[M]. Norwood, USA: Artech House, 1989: 287–288. [57] 稂时楠. 极地高分辨率冰雷达成像与数据处理方法研究[D]. 北京: 中国科学院大学, 2015: 19–20. https://d.wanfangdata.com.cn/thesis/Y2851481.LANG Shinan. Research on the Imaging and Signal Processing of High-resolution Ice-sounding Radar[D]. Beijing: The University of Chinese Academy of Sciences, 2015: 19–20. https://d.wanfangdata.com.cn/thesis/Y2851481. [58] CARRER L, GEREKOS C, BOVOLO F, et al. Distributed radar sounder: A novel concept for subsurface investigations using sensors in formation flight[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(12): 9791–9809. doi: 10.1109/TGRS.2019.2929422 [59] HAYNES M S, BEAUCHAMP R M, KHAZENDAR A, et al. Debris: Distributed element beamformer radar for ice and subsurface sounding[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 651–654. [60] BRUZZONE L, BOVOLO F, CARRER L, et al. STRATUS: A new mission concept for monitoring the subsurface of polar and arid regions[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 661–664. [61] GOGINENI S, YAN S, SONG P, et al. UWB MIMO radars for sounding and imaging of ice on the Earth and other celestial bodies[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 657–660. [62] GOGINENI P, SIMPSON C R, YAN Jiebang, et al. A CubeSat train for radar sounding and imaging of Antarctic ice sheet[C]. 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018: 4138–4141. [63] HEIMILLER R C, BELYEA J E, and TOMLINSON P G. Distributed array radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 1983, AES-19(6): 831–839. doi: 10.1109/TAES.1983.309395 [64] CHRISTIANSON K, JACOBEL R W, HORGAN H J, et al. Basal conditions at the grounding zone of Whillans ice stream, west Antarctica, from ice-penetrating radar[J]. Journal of Geophysical Research, 2016, 121(11): 1954–1983. doi: 10.1002/2015JF003806 [65] XIAO Peng, GUO Wei, LIU Bo, et al. A spaceborne multistatic radar sounding system for the tomographic observation of polar ice sheets[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 3502205. doi: 10.1109/LGRS.2020.3043356 [66] NASA-ISRO SAR (NISAR) mission science users’ handbook[R]. 2018. https://nisar.jpl.nasa.gov/system/documents/files/26_NISAR_FINAL_9-6-19.pdf?_ga=2.129501448.504649304.1621295245-843208160.1541002583. [67] CARBONE A, COSTA G, FEHRINGER M, et al. The biomass system - overview and development status[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 2021: 775–778. [68] HUBER S, DE ALMEIDA F Q, VILLANO M, et al. Tandem-L: A technical perspective on future spaceborne SAR sensors for Earth observation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(8): 4792–4807. doi: 10.1109/TGRS.2018.2837673 [69] 张威, 尹冉冉, 沈俊. TerreStar卫星移动通信系统[J]. 数字通信世界, 2012(1): 32–34. doi: 10.3969/j.issn.1672-7274.2012.01.007ZHANG Wei, YIN Ranran, and SHEN Jun. TerreStar satellite mobile communication system[J]. Digital Communication World, 2012(1): 32–34. doi: 10.3969/j.issn.1672-7274.2012.01.007 [70] BREIT H, YOUNIS M, BALSS U, et al. Bistatic synchronization and processing of TanDEM-X data[C]. 2021 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, Canada, 2011: 2424–2427. [71] LIANG Da, Liu Kaiyu, Zhang Heng, Z et al. An advanced non-interrupted phase synchronization scheme with internal calibration for LuTan-1[C]. The 13th European Conference on Synthetic Aperture Radar, 2021. https://ieeexplore.ieee.org/document/9472743. [72] ŚWIERAD D, HÄFNER S, VOGT S, et al. Ultra-stable clock laser system development towards space applications[J]. Scientific Reports, 2016, 6(1): 33973. doi: 10.1038/srep33973 [73] LEZIUS M, WILKEN T, DEUTSCH C, et al. Space-borne frequency comb metrology[J]. Optica, 2016, 3(12): 1381–1387. doi: 10.1364/optica.3.001381 [74] MCGREW W F, ZHANG X, FASANO R, et al. Atomic clock performance enabling geodesy below the centimetre level[J]. Nature, 2018, 564(7734): 87–90. doi: 10.1038/s41586-018-0738-2 [75] HINKLEY N, SHERMAN J A, PHILLIPS N B, et al. An atomic clock with 10–18 instability[J]. Science, 2013, 341(6151): 1215–1218. doi: 10.1126/science.1240420 [76] NICHOLSON T L, CAMPBELL S L, HUTSON R B, et al. Systematic evaluation of an atomic clock at 2×10−18 total uncertainty[J]. Nature Communications, 2015, 6(1): 6896. doi: 10.1038/ncomms7896 [77] MITTERMAYER J, KRIEGER G, BOJARSKI A, et al. MirrorSAR: An HRWS add-on for single-pass multi-baseline SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, in press, 2021. [78] PERAL E, TANELLI S, STATHAM S, et al. Raincube - A new paradigm to observe weather processes[C]. 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019: 4978–4981. -









计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

