
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Sparse Bayesian Learning Approach for Vortex Electromagnetic Wave Three-dimensional Imaging in the Terahertz Band
-
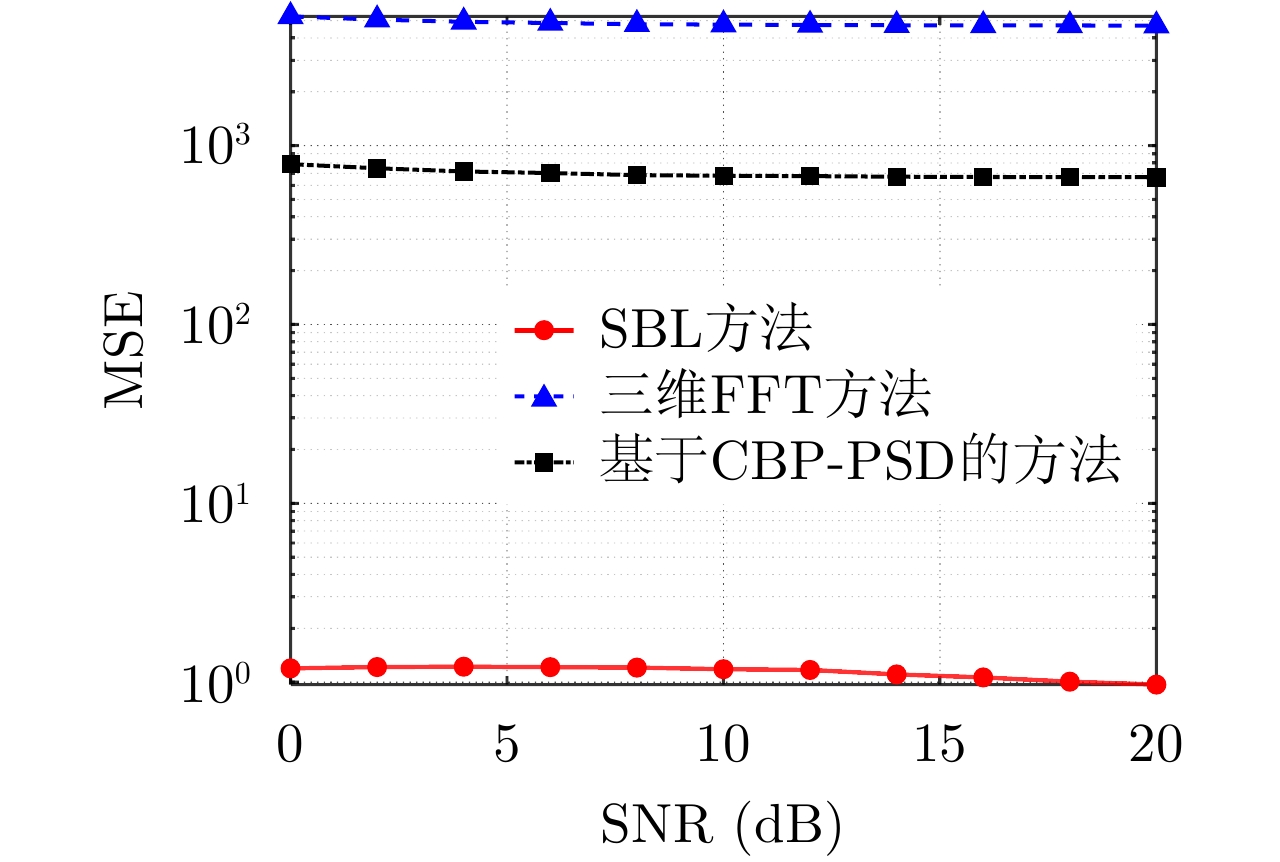
摘要: 在逆合成孔径雷达(ISAR)成像体制下,当太赫兹雷达发射带宽信号且波形为涡旋电磁波时,利用涡旋电磁波形成的差异性辐射场和雷达与目标相对运动形成的合成孔径,通过方位俯仰的信息解耦最终可实现目标高分辨三维成像。因此,该文建立了基于电磁涡旋ISAR的目标三维成像模型,提出了一种基于稀疏贝叶斯学习(SBL)的图像重建方法和分区域幅度阈值设置方法,极大地简化了成像过程,减少了计算量。仿真结果表明,相比传统的基于快速傅里叶变换的成像方法,该文提出的SBL方法可以获得更高的成像分辨率,且重构性能随信噪比的增大而提升。Abstract: In the Inverse Synthetic Aperture Radar (ISAR) imaging system, when the terahertz radar transmits the wide bandwidth signal and vortex electromagnetic wave, Three-Dimensional (3D) high-resolution imaging can be achieved through information decoupling based on the differential radiation field formed by the vortex electromagnetic wave and the synthetic aperture formed by the relative movement of the radar and the target. Accordingly, a 3D imaging model based on the terahertz vortex electromagnetic wave ISAR is established. A new image reconstruction method is proposed based on the Sparse Bayesian Learning (SBL) and subregion amplitude threshold setting methods. The proposed method can significantly simplify the imaging procedure and reduce the computational load. The simulation results indicate that the proposed SBL method can achieve a higher resolution than the conventional fast Fourier transform-based method, and its reconstruction performance increases with an increase in the signal-to-noise ratio.
-
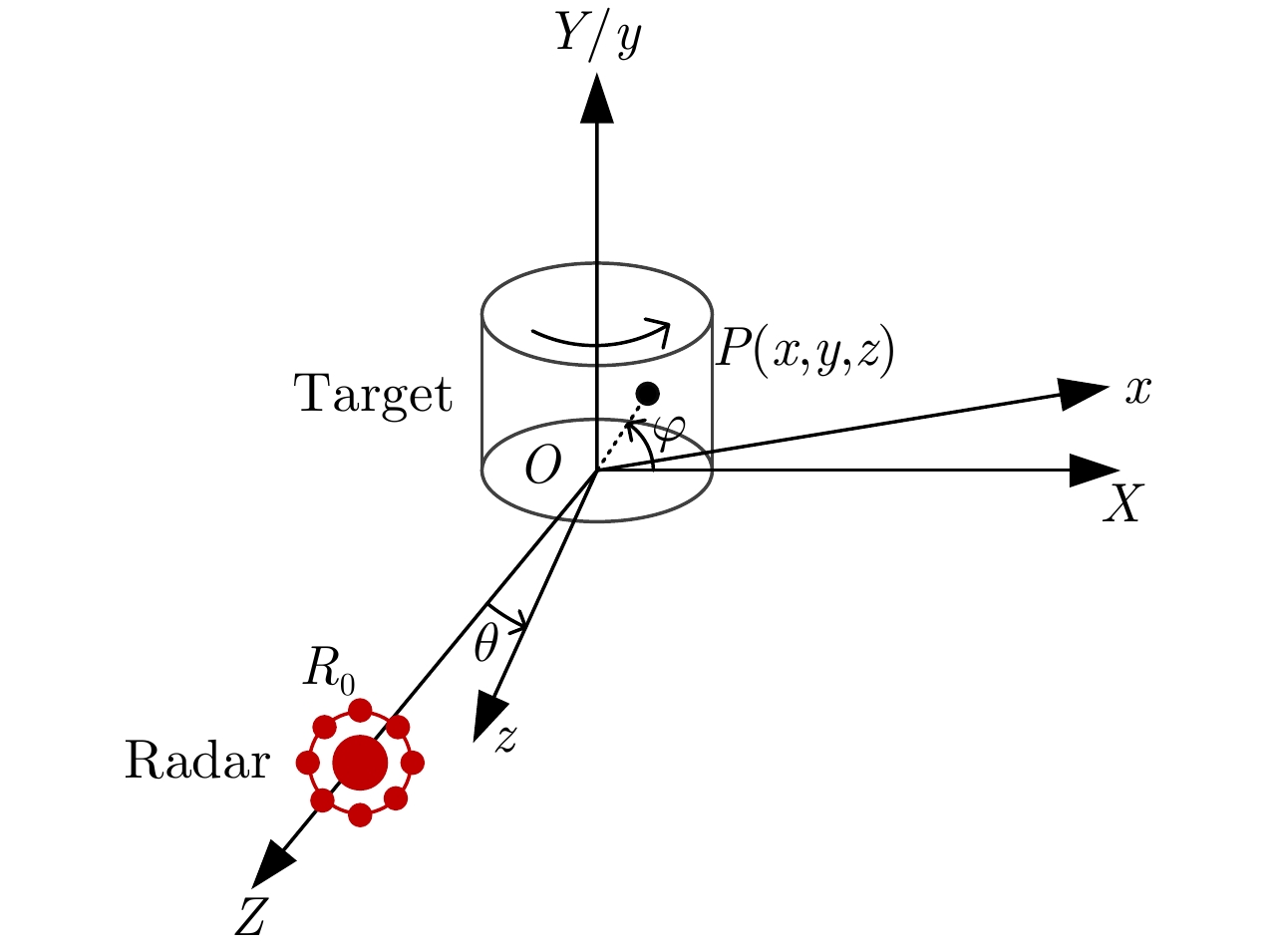
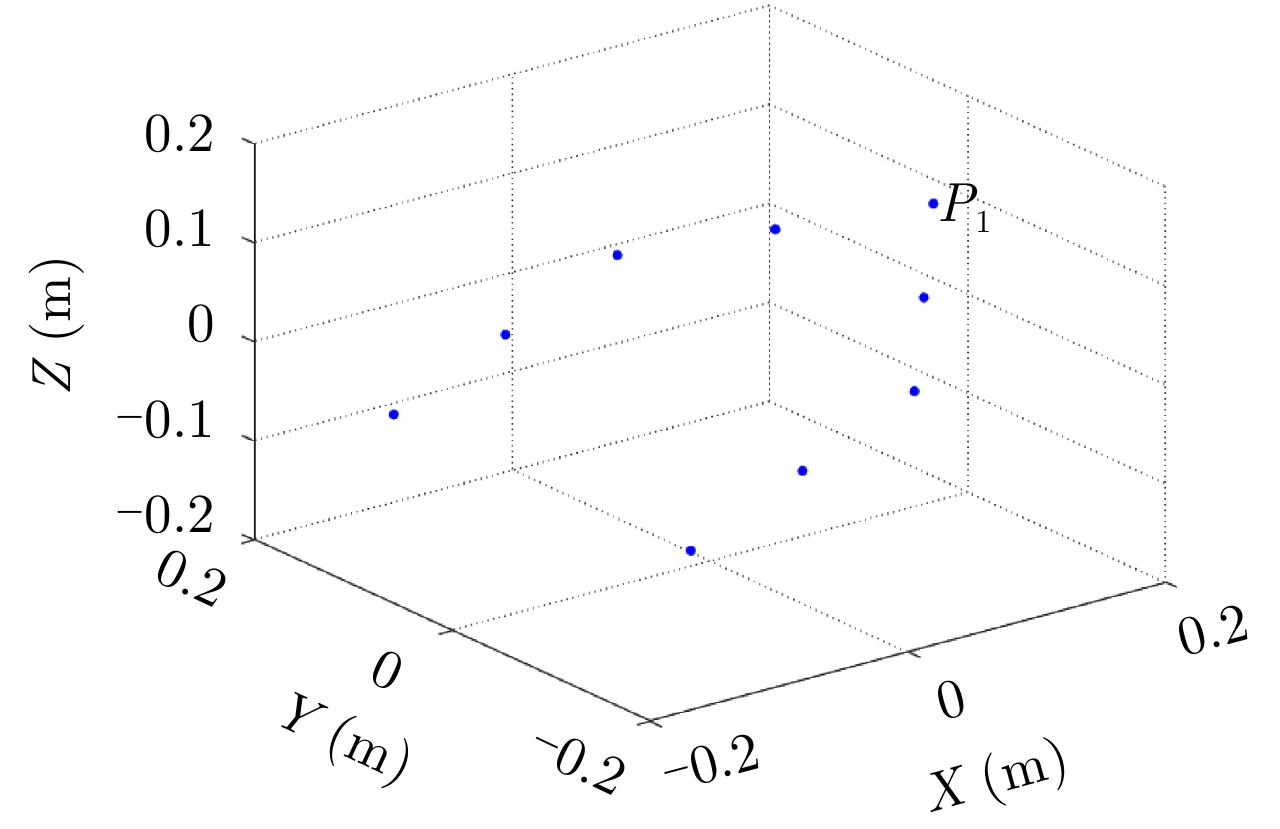
图 1 基于电磁涡旋ISAR的三维成像几何
Figure 1. Sketch map of the 3D imaging geometry based on electromagnetic vortex ISAR
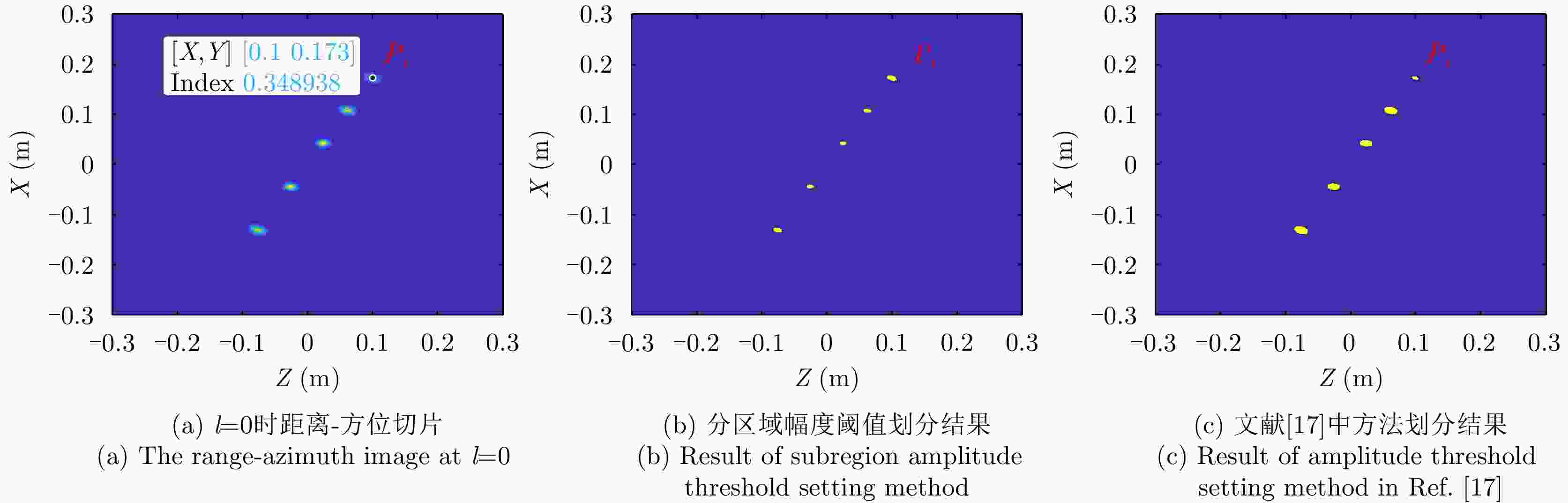
图 4 l =0时距离-方位切片及不同幅度阈值划分结果
Figure 4. The range-azimuth image at l =0 and the results of different amplitude threshold setting method
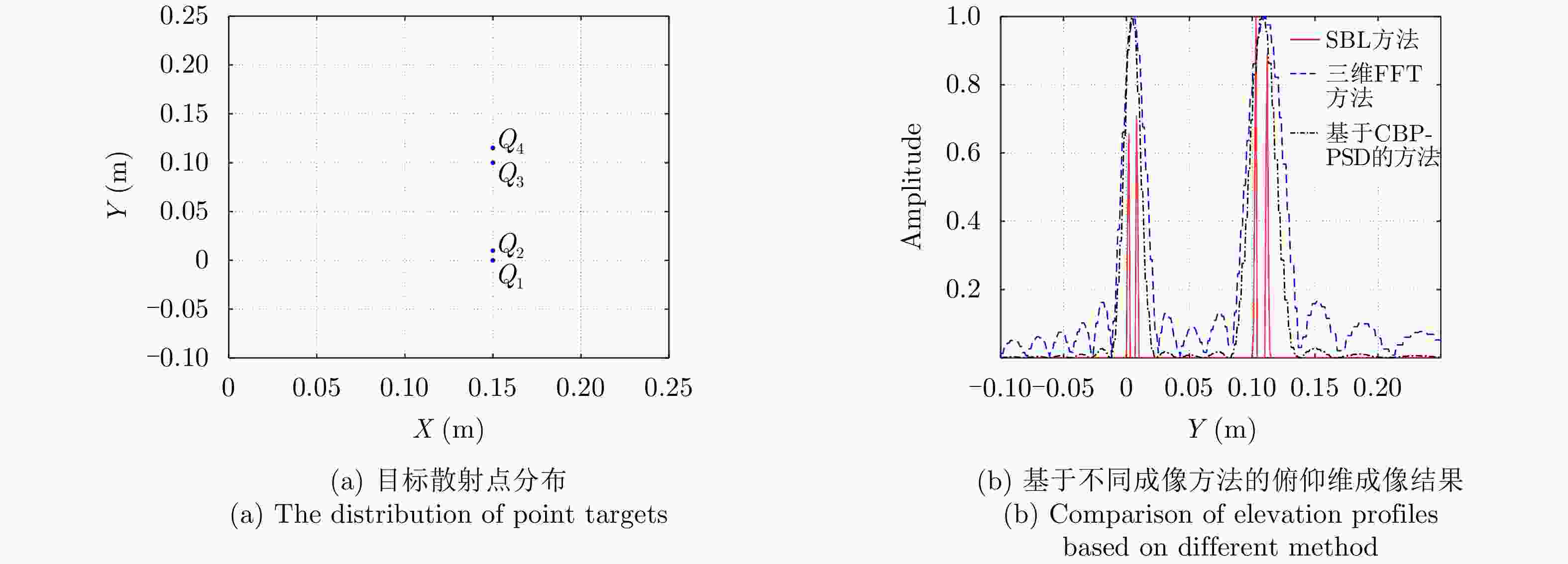
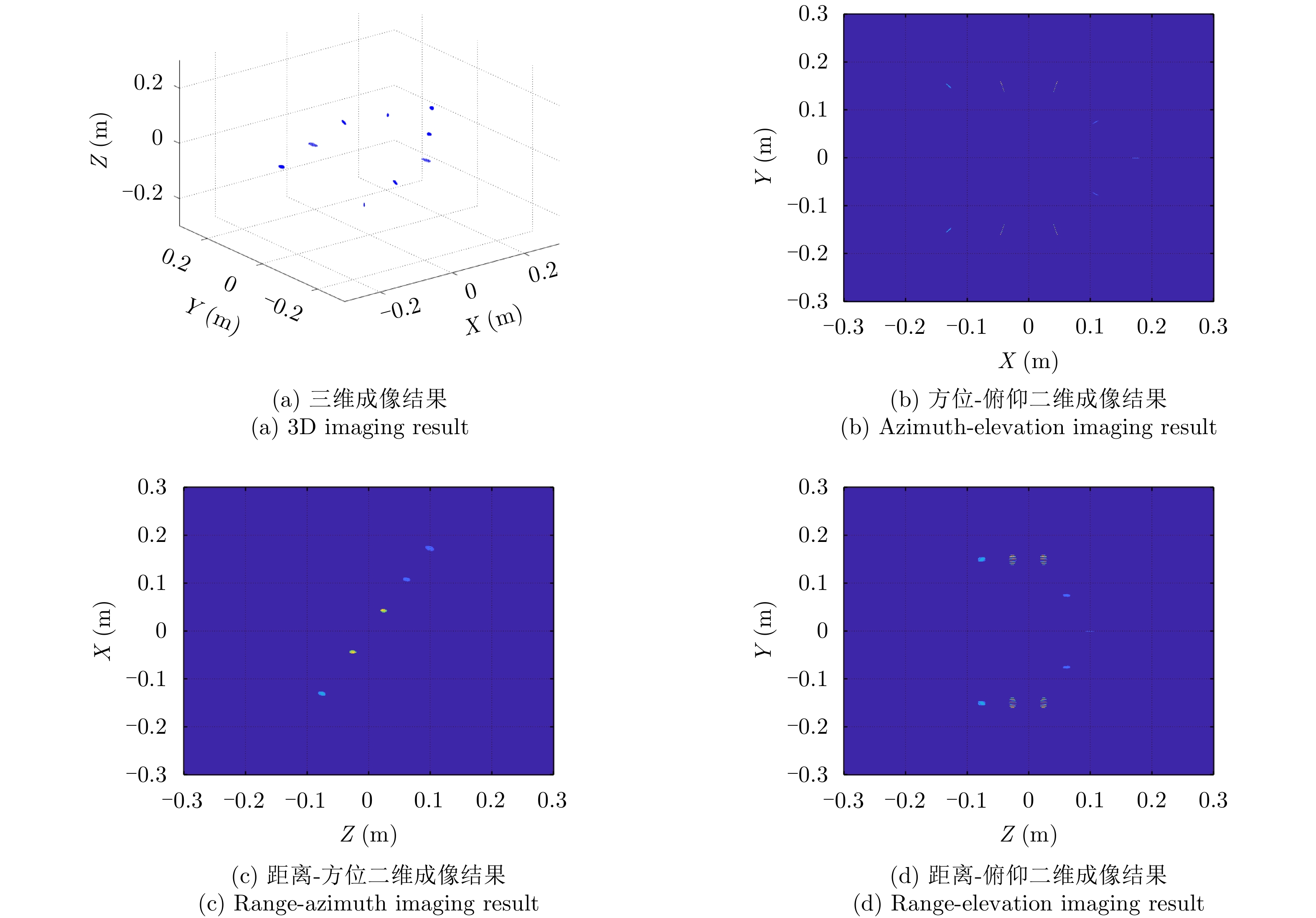
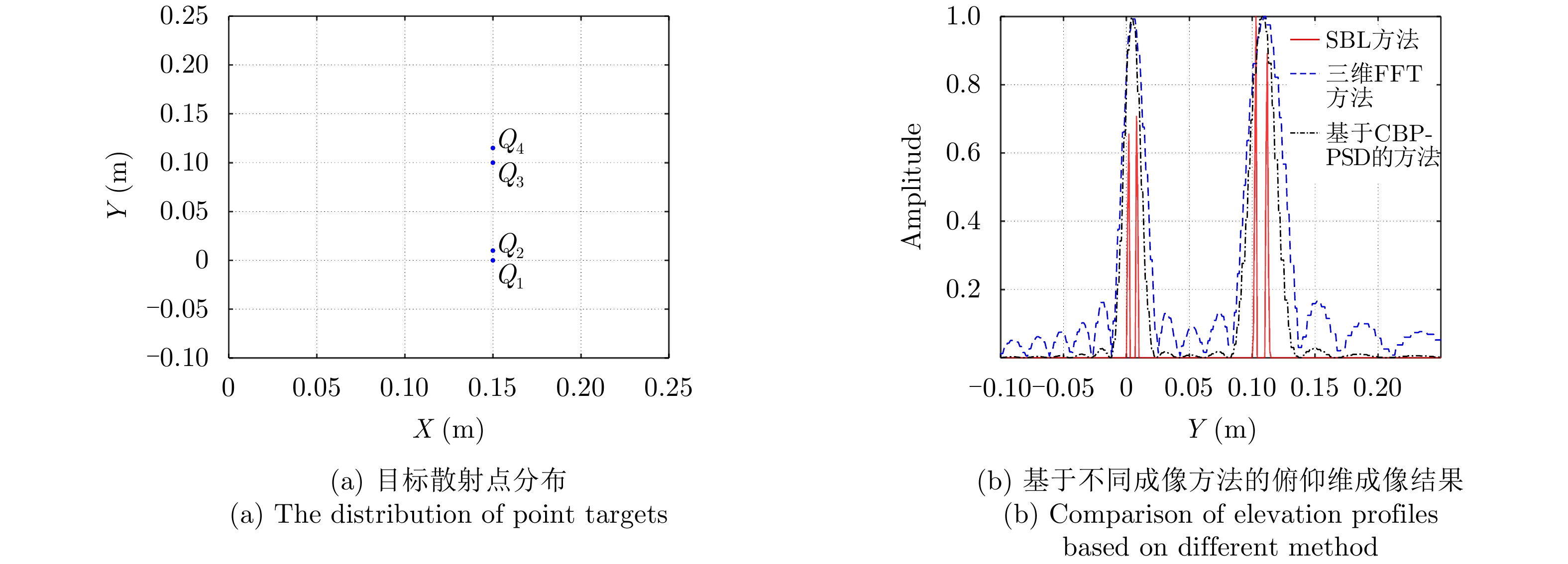
图 6 目标散射点分布及其成像结果对比
Figure 6. The distribution of targets and comparison of imaging results
-
[1] LIU Kang, LIU Hongyan, QIN Yuliang, et al. Generation of OAM beams using phased array in the microwave band[J]. IEEE Transactions on Antennas and Propagation, 2016, 64(9): 3850–3857. doi: 10.1109/TAP.2016.2589960 [2] 郭忠义, 汪彦哲, 郑群, 等. 涡旋电磁波天线技术研究进展[J]. 雷达学报, 2019, 8(5): 631–655. doi: 10.12000/JR19091GUO Zhongyi, WANG Yanzhe, ZHENG Qun, et al. Advances of research on antenna technology of vortex electromagnetic waves[J]. Journal of Radars, 2019, 8(5): 631–655. doi: 10.12000/JR19091 [3] SHEN Fei, MU Jiangnan, GUO Kai, et al. Generating circularly polarized vortex electromagnetic waves by the conical conformal patch antenna[J]. IEEE Transactions on Antennas and Propagation, 2019, 67(9): 5763–5771. doi: 10.1109/TAP.2019.2922545 [4] 郭桂蓉, 胡卫东, 杜小勇. 基于电磁涡旋的雷达目标成像[J]. 国防科技大学学报, 2013, 35(6): 71–76. doi: 10.3969/j.issn.1001-2486.2013.06.013GUO Guirong, HU Weidong, and DU Xiaoyong. Electromagnetic vortex based radar target imaging[J]. Journal of National University of Defense Technology, 2013, 35(6): 71–76. doi: 10.3969/j.issn.1001-2486.2013.06.013 [5] BU Xiangxi, ZHANG Zhuo, CHEN Longyong, et al. Implementation of vortex electromagnetic waves High-Resolution synthetic aperture radar imaging[J]. IEEE Antennas and Wireless Propagation Letters, 2018, 17(5): 764–767. doi: 10.1109/LAWP.2018.2814980 [6] LIU Kang, LIU Hongyan, SHA W E I, et al. Backward scattering of electrically large standard objects illuminated by OAM beams[J]. IEEE Antennas and Wireless Propagation Letters, 2020, 19(7): 1167–1171. doi: 10.1109/LAWP.2020.2993687 [7] LIU Kang, CHENG Yongqiang, YANG Zhaocheng, et al. Orbital-angular-momentum-based electromagnetic vortex imaging[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14: 711–714. doi: 10.1109/LAWP.2014.2376970 [8] YANG Taoli, LI Shihua, XU Ou, et al. Three dimensional SAR imaging based on vortex electromagnetic waves[J]. Remote Sensing Letters, 2018, 9(4): 343–352. doi: 10.1080/2150704X.2017.1421791 [9] JIANG Yanwen, LIU Kang, WANG Hongqiang, et al. Orbital-angular-momentum-based ISAR imaging at terahertz frequencies[J]. IEEE Sensors Journal, 2018, 18(22): 9230–9235. doi: 10.1109/JSEN.2018.2869047 [10] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005.BAO Zheng, XING Mengdao, and WANG Tong. Technology of Radar Imaging[M]. Beijing: Publishing House of Electronics Industry, 2005. [11] GUI Shuliang, LI Jin, and PI Yiming. Security imaging for multi-target screening based on adaptive scene segmentation with terahertz radar[J]. IEEE Sensors Journal, 2019, 19(7): 2675–2684. doi: 10.1109/JSEN.2018.2889884 [12] JIANG Yanwen, WANG Hongqiang, QIN Yuliang, et al. A three-dimensional surface imaging method using THz dual-frequency interferometry[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(11): 1651–1655. doi: 10.1109/LGRS.2016.2600570 [13] SHEEN D M, MCMAKIN D L, and HALL T E. Three-dimensional millimeter-wave imaging for concealed weapon detection[J]. IEEE Transactions on Microwave Theory and Techniques, 2001, 49(9): 1581–1592. doi: 10.1109/22.942570 [14] CARIS M, STANKO S, PALM S, et al. 300 GHz radar for high resolution SAR and ISAR applications[C]. 2015 16th International Radar Symposium, Dresden, Germany, 2015: 577–580. doi: 10.1109/IRS.2015.7226313. [15] WIPF D P and RAO B D. Sparse Bayesian learning for basis selection[J]. IEEE Transactions on Signal Processing, 2004, 52(8): 2153–2164. doi: 10.1109/TSP.2004.831016 [16] DESAI M D and JENKINS W K. Convolution backprojection image reconstruction for spotlight mode synthetic aperture radar[J]. IEEE Transactions on Image Processing, 1992, 1(4): 505–517. doi: 10.1109/83.199920 [17] 蒋彦雯. 太赫兹阵列雷达三维成像技术研究[D]. [博士论文], 国防科技大学, 2018.JIANG Yanwen. Study on the 3D imaging technology for terahertz array radar[D]. [Ph. D. dissertation], National University of Defense Technology, 2018. [18] SEEGER M W and WIPF D P. Variational Bayesian inference techniques[J]. IEEE Signal Processing Magazine, 2010, 27(6): 81–91. doi: 10.1109/MSP.2010.938082 [19] GONZALEZ R C, WOODS R E, EDDINS S L. 阮秋琦, 阮宇智, 译. 数字图像处理[M]. 3版. 北京: 电子工业出版社, 2020.GONZALEZ R C, WOODS R E, EDDINS S L. RUAN Qiuqi, RUAN Yuzhi, translation. Digital Image Processing[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2020. -

 下载:
下载:


图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

