
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A New Method of Joint Radar and Communication Waveform Design and Signal Processing Based on OFDM-chirp
-
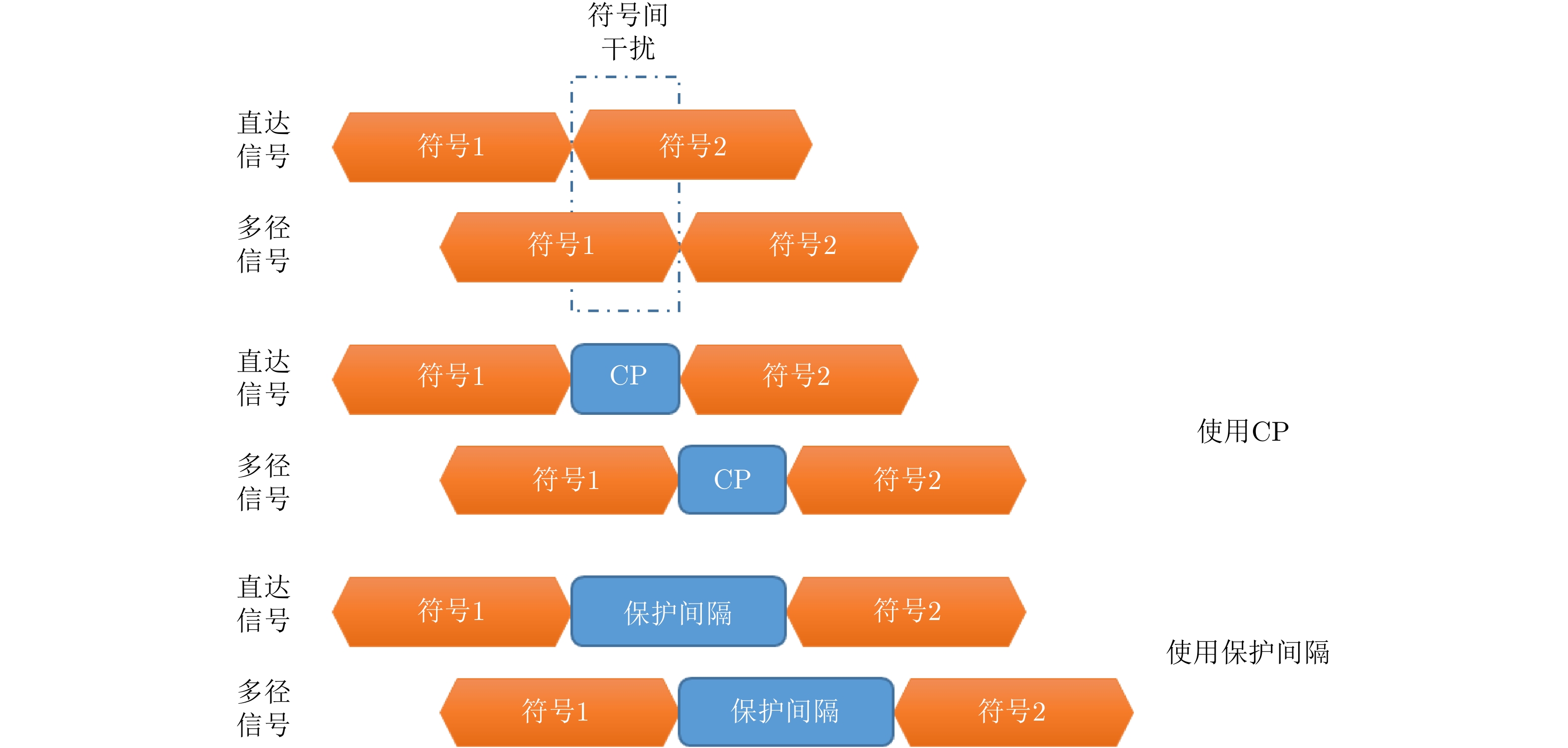
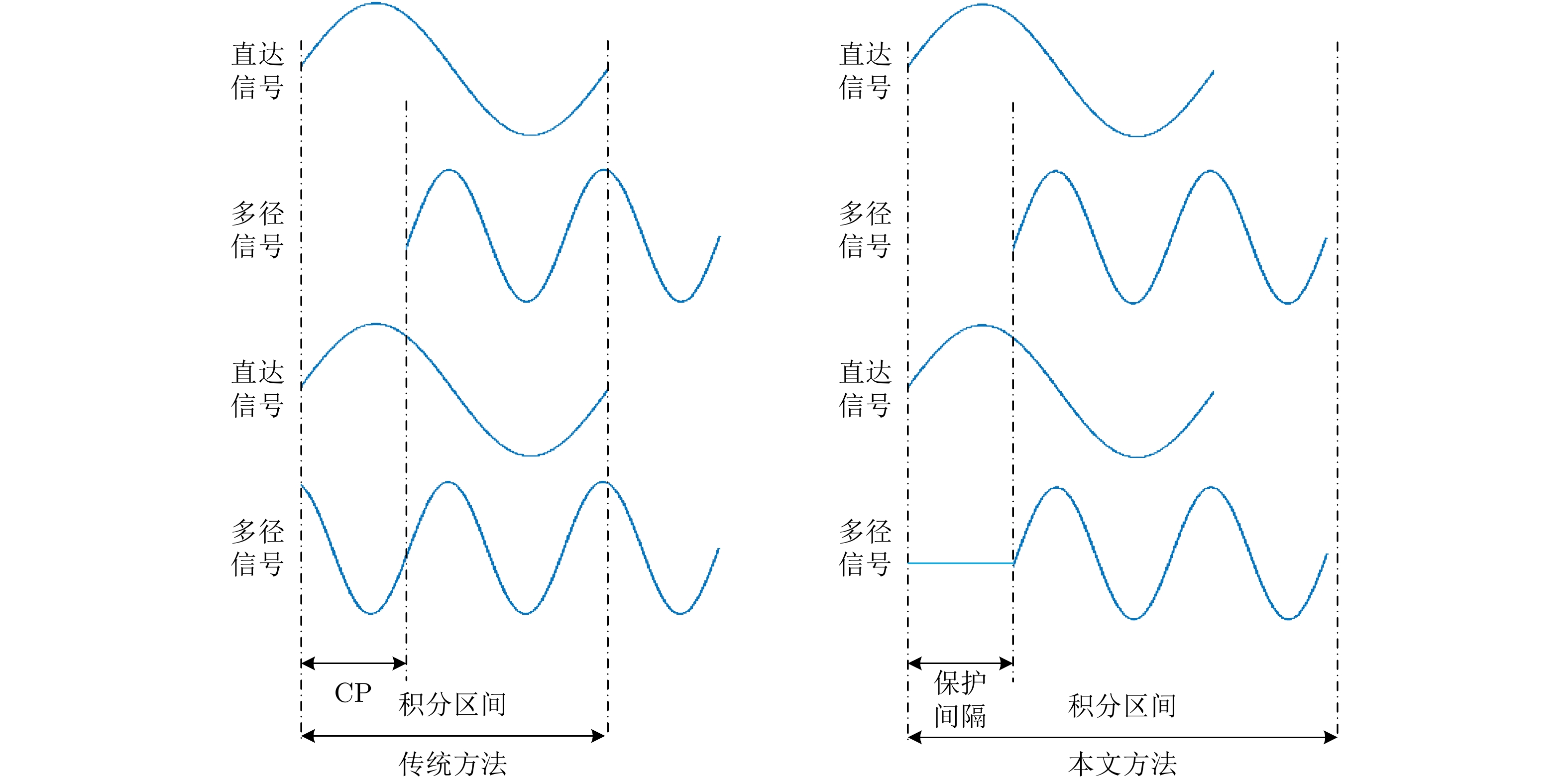
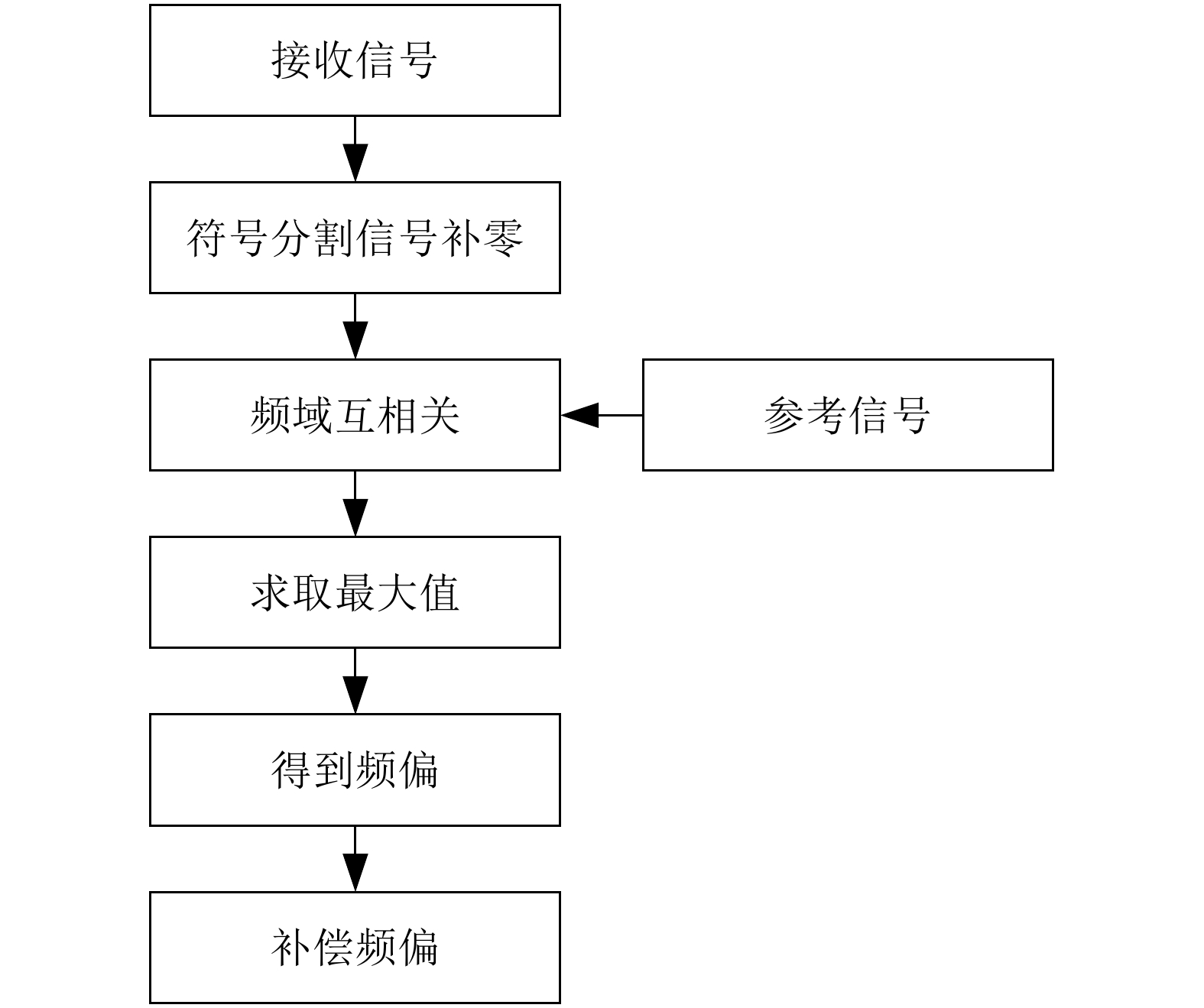
摘要: 雷达通信一体化波形设计是近年来的研究热点。有学者提出利用正交频分复用(OFDM)信号的奇偶载波分别调制雷达与通信功能来实现一体化。但OFDM通信系统一般采用循环前缀(CP)来避免多径效应带来的载波间干扰(ICI)和符号间干扰(ISI),这会降低能量利用率,并会形成虚假目标,影响雷达性能;此外,传统的OFDM一体化信号对多普勒比较敏感,微小的多普勒频偏也会带来正交性能的严重下降。该文在此基础上提出了一种新的波形设计和处理方法。该方法利用空白保护间隔替代循环前缀,可以在对抗多径效应的同时避免出现由于循环前缀引入的虚假目标,有效防止载波间干扰和符号间干扰。在信号处理方法上,该文提出利用雷达发射信号的先验信息进行信道估计与补偿多普勒频偏的方法。与传统方法相比,该文方法降低了系统在导频与训练序列等资源上的开销,提升了能量利用率和频谱效率,并且改善了峰值旁瓣比(PSLR)、积分旁瓣比(ISLR)和通信误码率(BER)等指标。仿真实验验证了该文方法的有效性。
-
关键词:
- 雷达通信一体化(JRC) /
- 正交频分复用(OFDM) /
- 多径效应 /
- 多普勒频偏 /
- 信道估计
Abstract: Waveform design of joint radar and communication has become a focus of intense research in recent years. Some scholars have proposed to use the odd and even carrier of Orthogonal Frequency Division Multiplexing (OFDM) signal to modulate the radar and communication functions, respectively, to realize the integration. However, OFDM systems generally use cyclic prefix to avoid Inter-Carrier Interference (ICI) and Inter-Symbol Interference (ISI) caused by multipath effects, reducing energy utilization and creating false targets, which affect radar performance. In addition, the traditional OFDM integrated signal is more sensitive to Doppler shift. A small Doppler frequency offset will also cause a considerable drop in orthogonal performance. On this basis, this paper proposes a new waveform design and processing method. This method uses blank guard intervals to replace cyclic prefixes, which can resist multipath effects while avoiding false targets introduced by cyclic prefixes, effectively preventing ICI and ISI. In terms of signal processing methods, this paper proposes a method for channel estimation and Doppler compensation using the priori information of the radar signal. Compared with the traditional method, this new method reduces the system’s resource overhead, such as pilot frequency and training sequence. It improves energy utilization and spectrum efficiency. The peak side lobe ratio, integration side lobe rate, and bit error ratio are also improved. Simulation experiments verify the effectiveness of this method. -
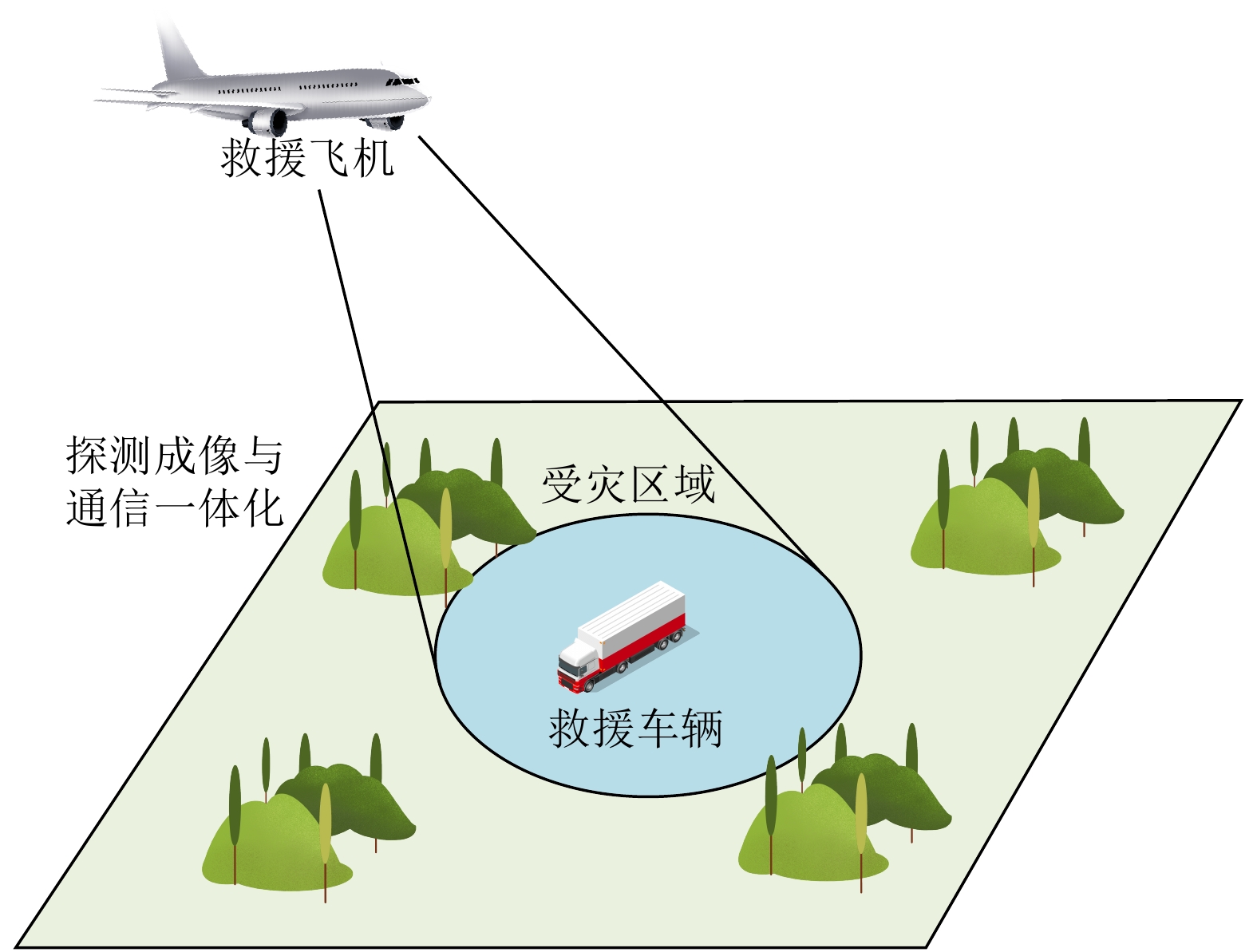
图 1 雷达通信一体化系统用于救灾
Figure 1. Application of joint radar and communication system in disaster relief

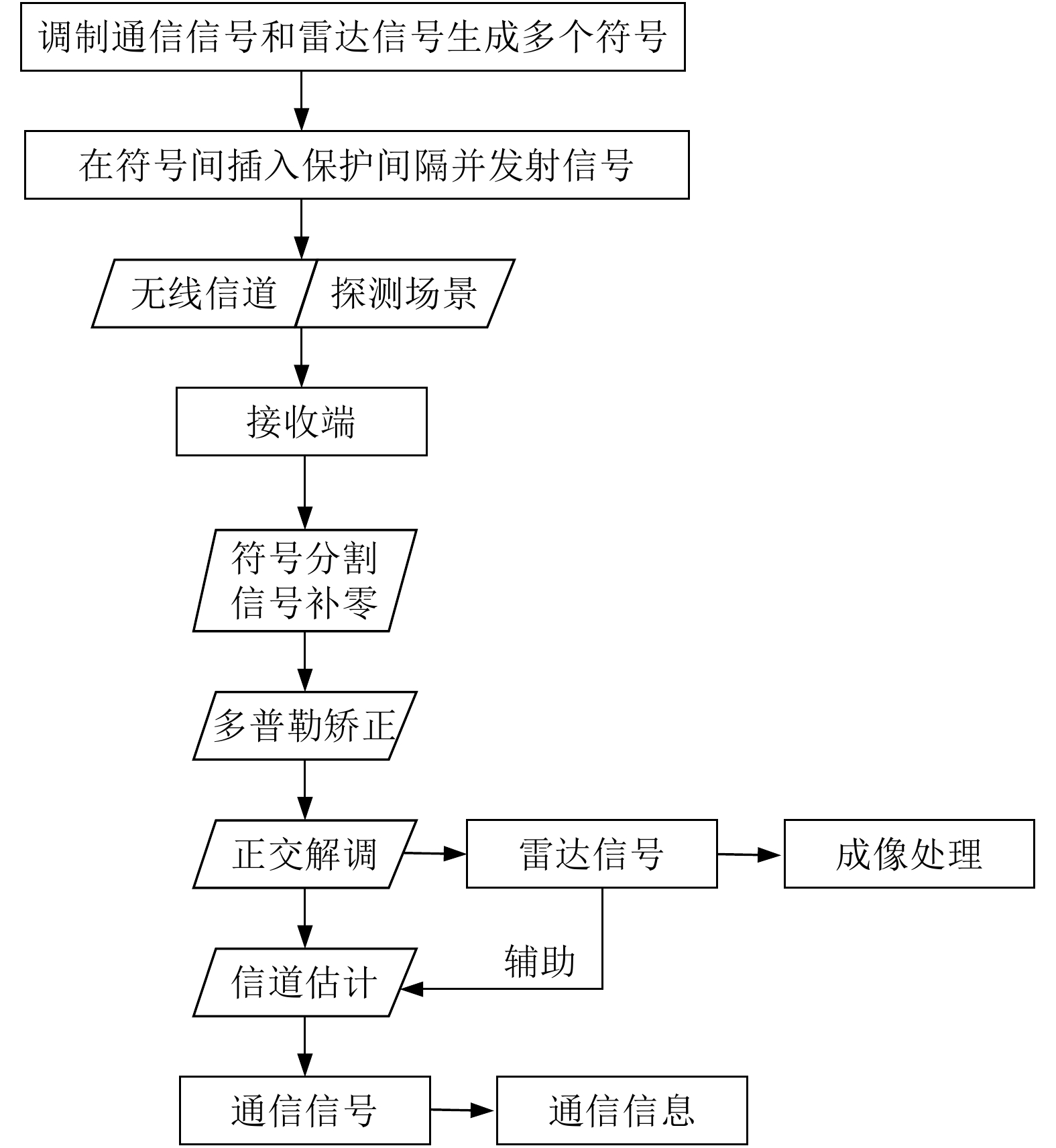
图 6 基于OFDM-chirp信号的雷达通信一体化波形设计与处理流程图
Figure 6. Joint radar and communication waveform design and processing flow chart based on OFDM chirp signal

图 8 星座图随着多普勒频移增大的变化特性
Figure 8. Variation characteristics of communication constellation with Doppler shift increasing
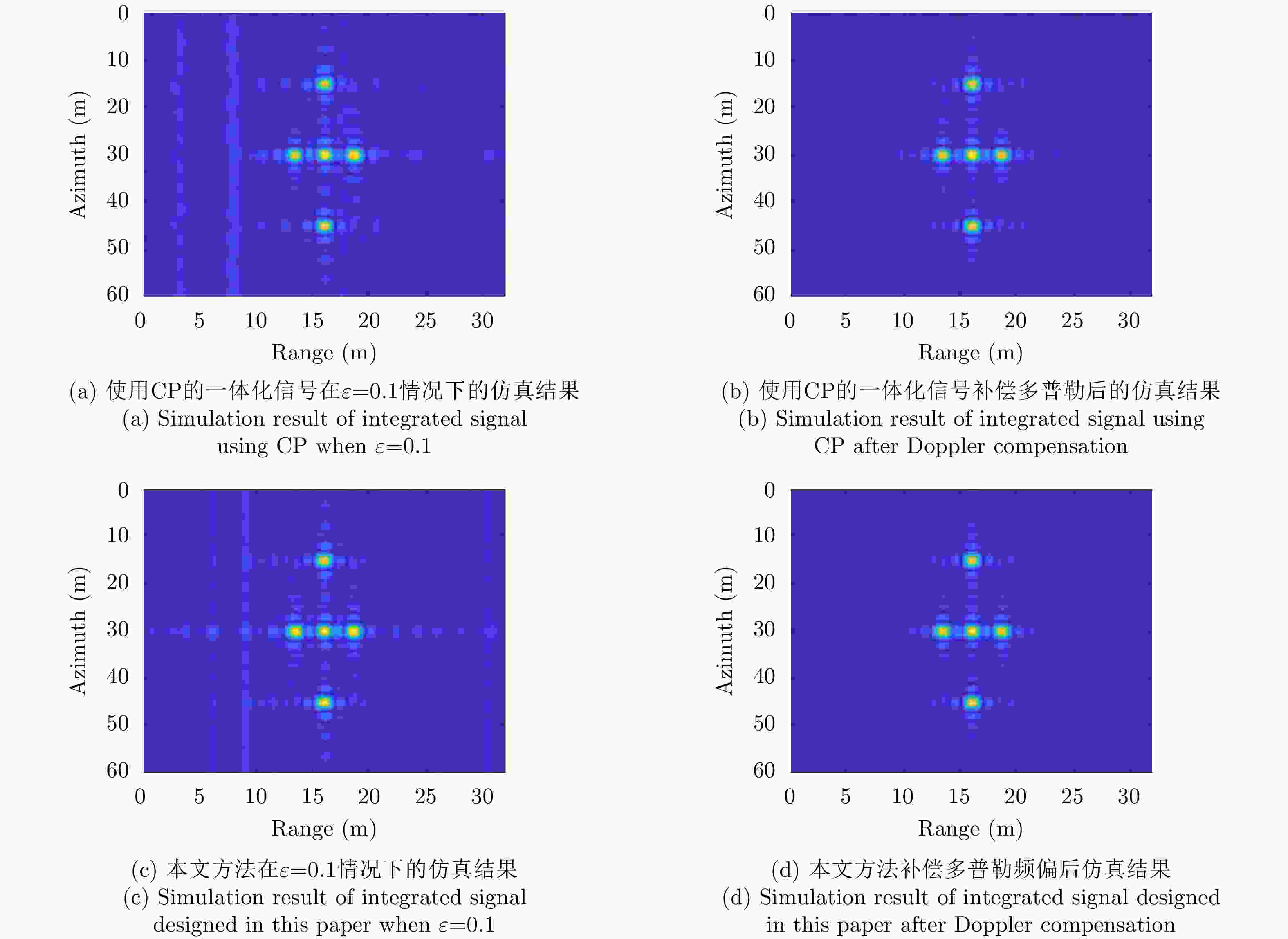
图 12 受多普勒影响的点目标成像仿真结果
Figure 12. Imaging results of point target affected by frequency offset
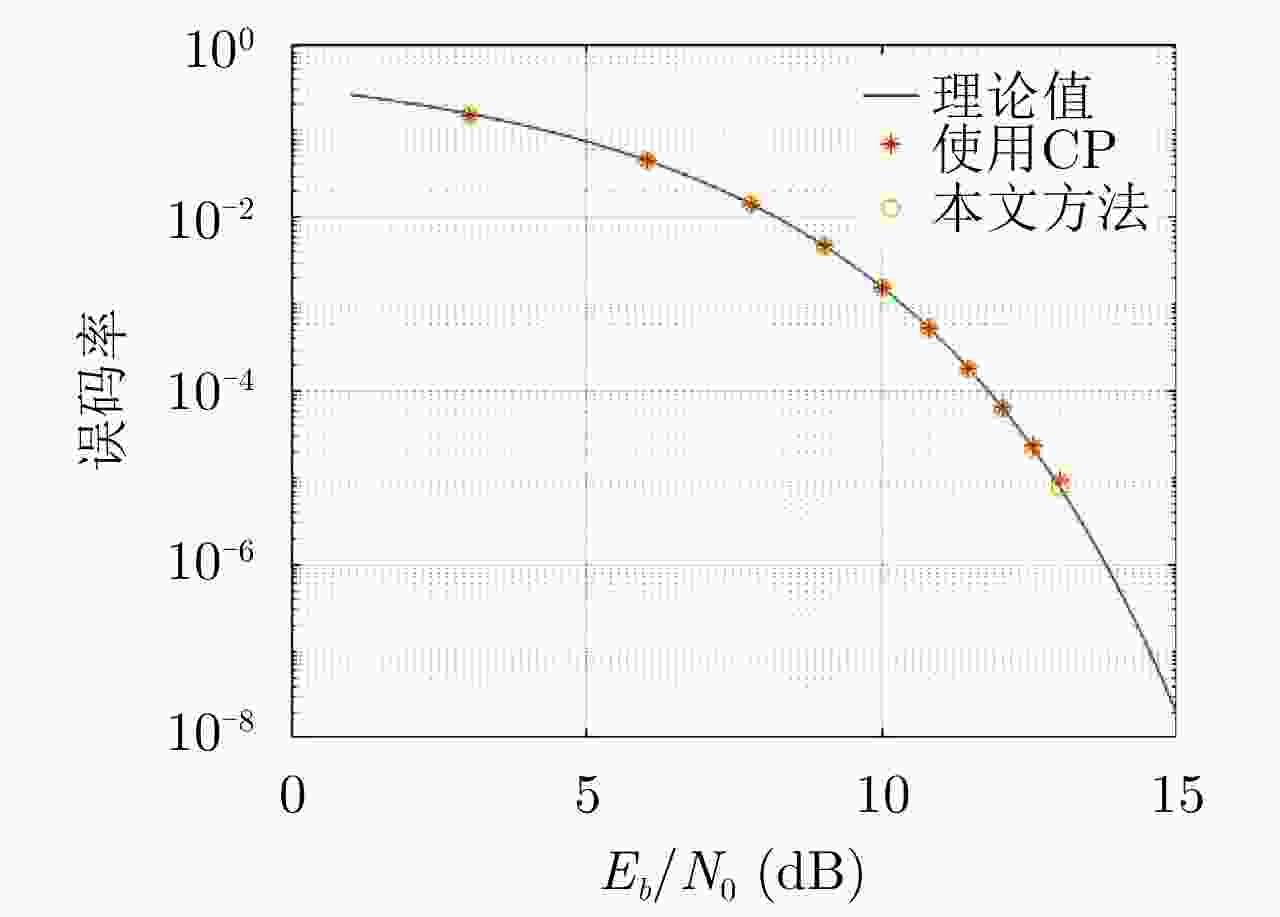
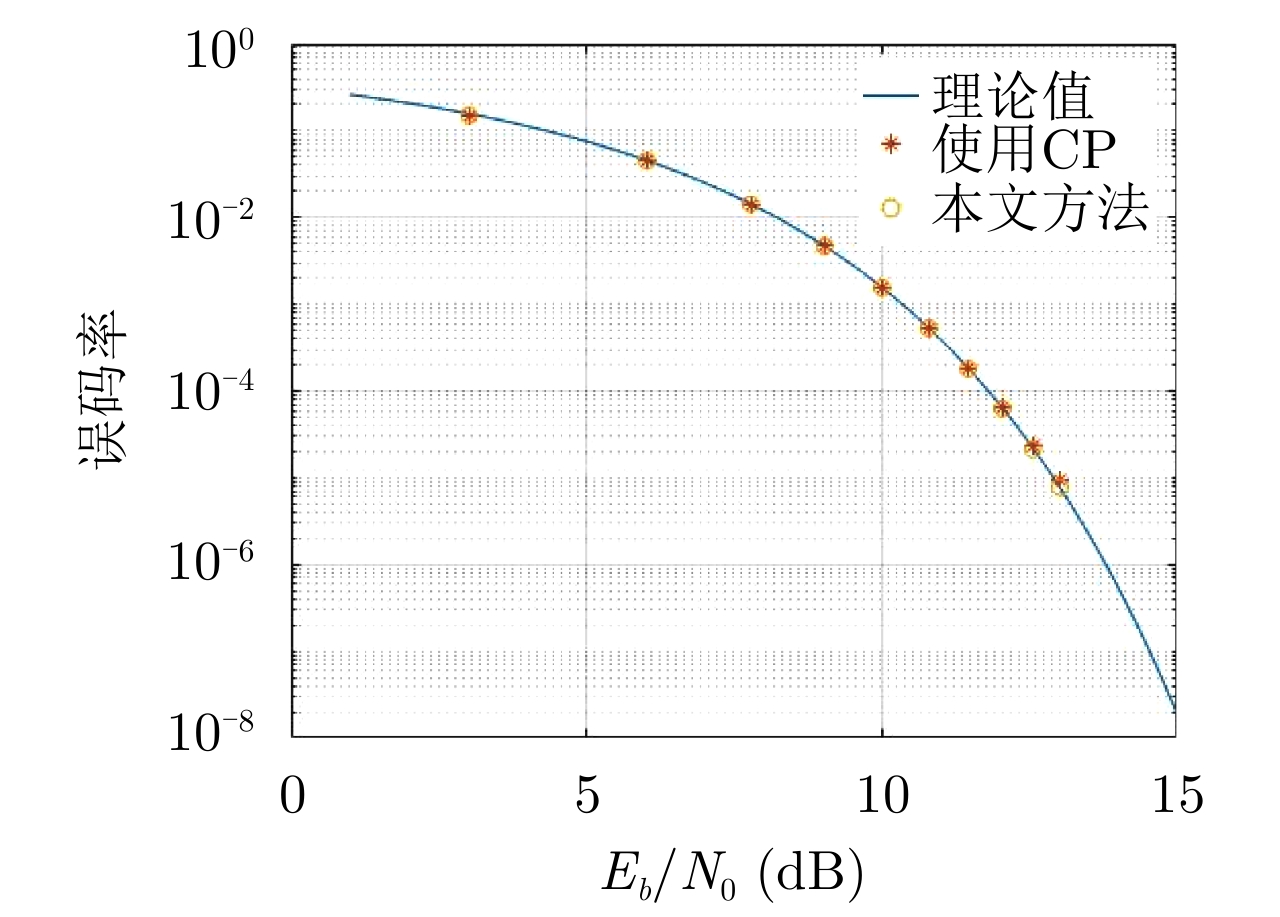
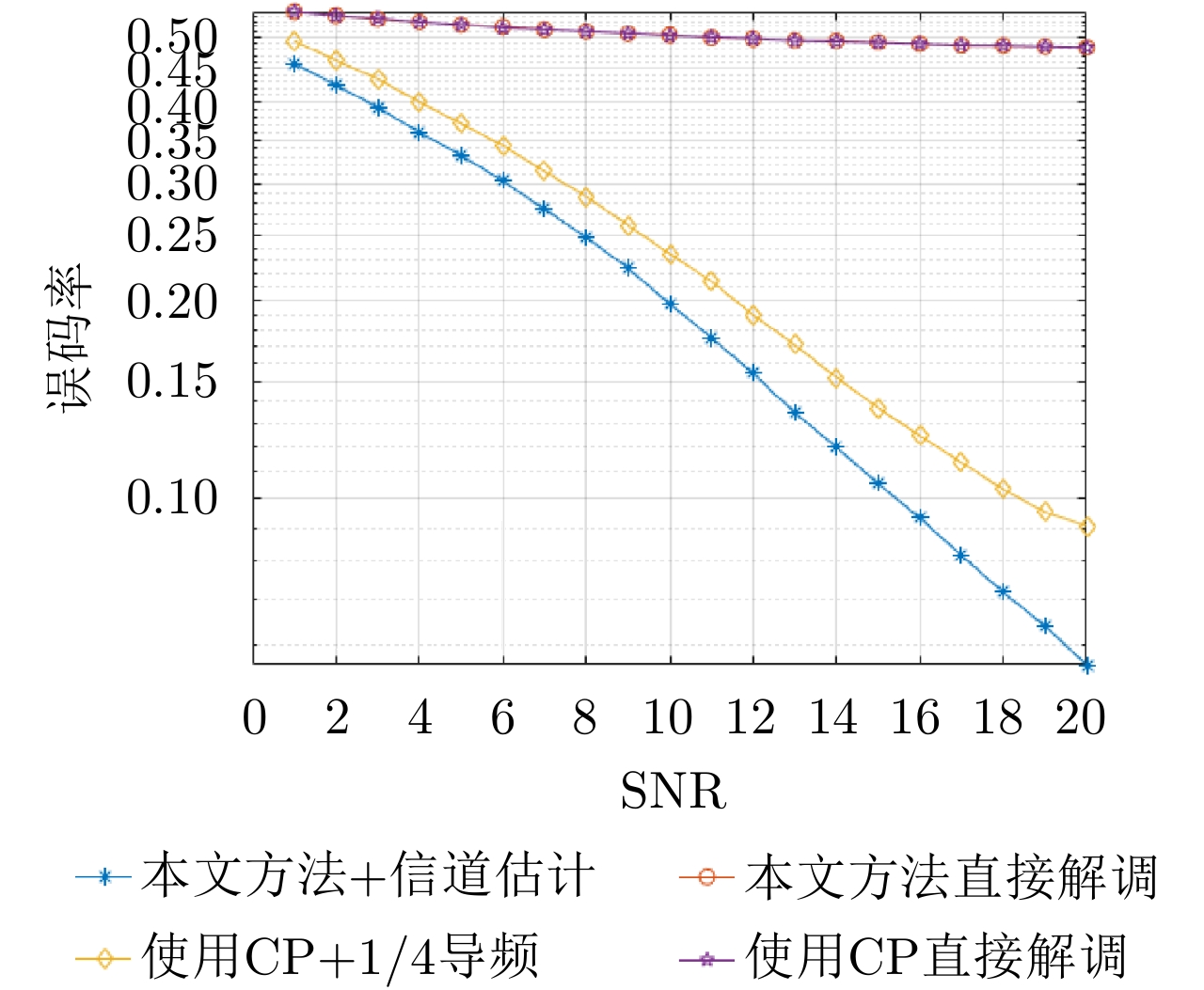
图 15 通信误码率与
$ {E}_{b}/{N}_{0} $ 的关系Figure 15. The relationship of communication error rate and
$ {E}_{b}/{N}_{0} $ 
图 17 不同载波个数下的一体化信号的峰均功率比
Figure 17. Peak to average power ratio of integrated signal with different number of carriers
表 1 仿真参数
Table 1. Simulation parameters
参数符号 参数名称 数值 $ B $ 信号带宽(MHz) 80 $ {F}_{s} $ 采样率(MHz) 100 $ T $ 信号时宽($ \mu $s) 40.96 $ N $ 子载波个数 4096 $ {f}_{c} $ 信号载频(GHz) 5.4 $ \Delta f $ 子载波间隔(kHz) 24.4 $ \mathrm{S}\mathrm{N}\mathrm{R} $ 信噪比(dB) 10 $ V $ 平台速度(m/s) 150 $ H $ 平台高度(m) 6000 $ {\theta }_{0} $ 中心下视角(°) 30 $ \mathrm{P}\mathrm{R}\mathrm{F} $ 脉冲重复频率(Hz) 188  下载: 导出CSV
下载: 导出CSV
表 2 点目标距离向切片指标对比(补偿多普勒后)
Table 2. Index comparison of point target
指标(dB) 传统方法 本文方法 PSLR –10.94 –13.24 ISLR –6.04 –9.67
下载: 导出CSV
表 3 本文方法与传统方法对比
Table 3. The comparison between traditional method and the method proposed in this paper
资源开销 本文方法 传统方法 循环前缀 不需要 需要 信道估计 利用雷达信号辅助估计 需要额外导频和训练序列 能量效率 较高 较低
下载: 导出CSV
-
[1] CHIRIYATH A R, PAUL B, and BLISS D W. Radar-communications convergence: Coexistence, cooperation, and co-design[J]. IEEE Transactions on Cognitive Communications and Networking, 2007, 3(1): 1–12. doi: 10.1109/TCCN.2017.2666266 [2] HAN Liang and WU Ke. Joint wireless communication and radar sensing systems - state of the art and future prospects[J]. IET Microwaves, Antennas & Propagation, 2013, 7(11): 876–885. doi: 10.1049/iet-map.2012.0450 [3] WANG Jie, LIANG Xingdong, CHEN Longyong, et al. First demonstration of joint wireless communication and high-resolution SAR imaging using airborne MIMO radar system[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(9): 6619–6632. doi: 10.1109/TGRS.2019.2907561 [4] LIU Yongjun, LIAO Guisheng, CHEN Yufeng, et al. Super-resolution range and velocity estimations with OFDM integrated radar and communications waveform[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 11659–11672. doi: 10.1109/TVT.2020.3016470 [5] 刘凡, 袁伟杰, 原进宏, 等. 雷达通信频谱共享及一体化: 综述与展望[J]. 雷达学报, 2021, 10(3): 467–484. doi: 10.12000/JR20113LIU Fan, YUAN Weijie, YUAN Jinhong, et al. Radar-communication spectrum sharing and integration: Overview and prospect[J]. Journal of Radars, 2021, 10(3): 467–484. doi: 10.12000/JR20113 [6] 王杰. 自适应多维波形SAR关键技术研究[D]. [博士论文], 中国科学院研究生院, 2015: 8–12.WANG Jie. Research on the key technologies of adaptive multidimensional waveform synthetic aperture radar[D]. [Ph. D. dissertation], Graduate School of Chinese Academy of Sciences, 2015: 8–12. [7] 梁兴东, 李强, 王杰, 等. 雷达通信一体化技术研究综述[J]. 信号处理, 2020, 36(10): 1615–1627. doi: 10.16798/j.issn.1003-0530.2020.10.001LIANG Xingdong, LI Qiang, WANG Jie, et al. Joint wireless communication and radar sensing: Review and future prospects[J]. Journal of Signal Processing, 2020, 36(10): 1615–1627. doi: 10.16798/j.issn.1003-0530.2020.10.001 [8] ROSSLER JR C W. Adaptive radar with application to joint communication and synthetic aperture radar (CoSAR)[D]. [Ph. D. dissertation], The Ohio State University, 2013. [9] BLUNT S D, YATHAM P, and STILES J. Intrapulse radar-embedded communications[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1185–1200. doi: 10.1109/TAES.2010.5545182 [10] LIU Yongjun, LIAO Guisheng, and YANG Zhiwei. Robust OFDM integrated radar and communications waveform design based on information theory[J]. Signal Processing, 2019, 162: 317–329. doi: 10.1016/j.sigpro.2019.05.001 [11] LIU Yongjun, LIAO Guisheng, YANG Zhiwei, et al. Multiobjective optimal waveform design for OFDM integrated radar and communication systems[J]. Signal Processing, 2017, 141: 331–342. doi: 10.1016/j.sigpro.2017.06.026 [12] LIU Yongjun, LIAO Guisheng, XU Jingwei, et al. Adaptive OFDM integrated radar and communications waveform design based on information theory[J]. IEEE Communications Letters, 2017, 21(10): 2174–2177. doi: 10.1109/LCOMM.2017.2723890 [13] LIU Yongjun, LIAO Guisheng, YANG Zhiwei, et al. Joint range and angle estimation for an integrated system combining MIMO radar with OFDM communication[J]. Multidimensional Systems and Signal Processing, 2019, 30(2): 661–687. doi: 10.1007/s11045-018-0576-2 [14] LIU Yongjun, LIAO Guisheng, XU Jingwei, et al. Transmit power adaptation for orthogonal frequency division multiplexing integrated radar and communication systems[J]. Journal of Applied Remote Sensing, 2017, 11(3): 035017. doi: 10.1117/1.JRS.11.035017 [15] MIZUI K, UCHIDA M, and NAKAGAWA M. Vehicle-to-vehicle communication and ranging system using spread spectrum technique (Proposal of Boomerang Transmission System)[C]. IEEE 43rd Vehicular Technology Conference, Secaucus, USA, 1993: 335–338. [16] DONNET B J and LONGSTAFF I D. Combining MIMO radar with OFDM communications[C]. 2006 European Radar Conference, Manchester, UK, 2006: 37–40. [17] 肖博, 霍凯, 刘永祥. 雷达通信一体化研究现状与发展趋势[J]. 电子与信息学报, 2019, 41(3): 739–750. doi: 10.11999/JEIT180515XIAO Bo, HUO Kai, and LIU Yongxiang. Development and prospect of radar and communication integration[J]. Journal of Electronics &Information Technology, 2019, 41(3): 739–750. doi: 10.11999/JEIT180515 [18] 张天贤, 夏香根. OFDM SAR成像方法综述[J]. 雷达学报, 2020, 9(2): 243–258. doi: 10.12000/JR19116ZHANG Tianxian and XIA Xianggen. An overview of OFDM SAR imaging methods[J]. Journal of Radars, 2020, 9(2): 243–258. doi: 10.12000/JR19116 [19] KIM J H, YOUNIS M, MOREIRA A, et al. Spaceborne MIMO synthetic aperture radar for multimodal operation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(5): 2453–2466. doi: 10.1109/tgrs.2014.2360148 [20] WANG Jie, LIANG Xingdong, and CHEN Longyong. MIMO SAR system using digital implemented OFDM waveforms[C]. The 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 7428–7431. [21] 李向宁, 谈振辉. OFDM基本原理及其在移动通信中的应用[J]. 重庆邮电学院学报, 2003, 15(2): 25–30, 44.LI Xiangning and TAN Zhenhui. OFDM principle and its applications in mobile communication[J]. Journal of Chongqing University of Posts and Telecommunications, 2003, 15(2): 25–30, 44. -













计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

