
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Geolocation Error Transfer Model and Trajectory Calibration Method for Airborne SAR Considering Motion Compensation Residual Error
-
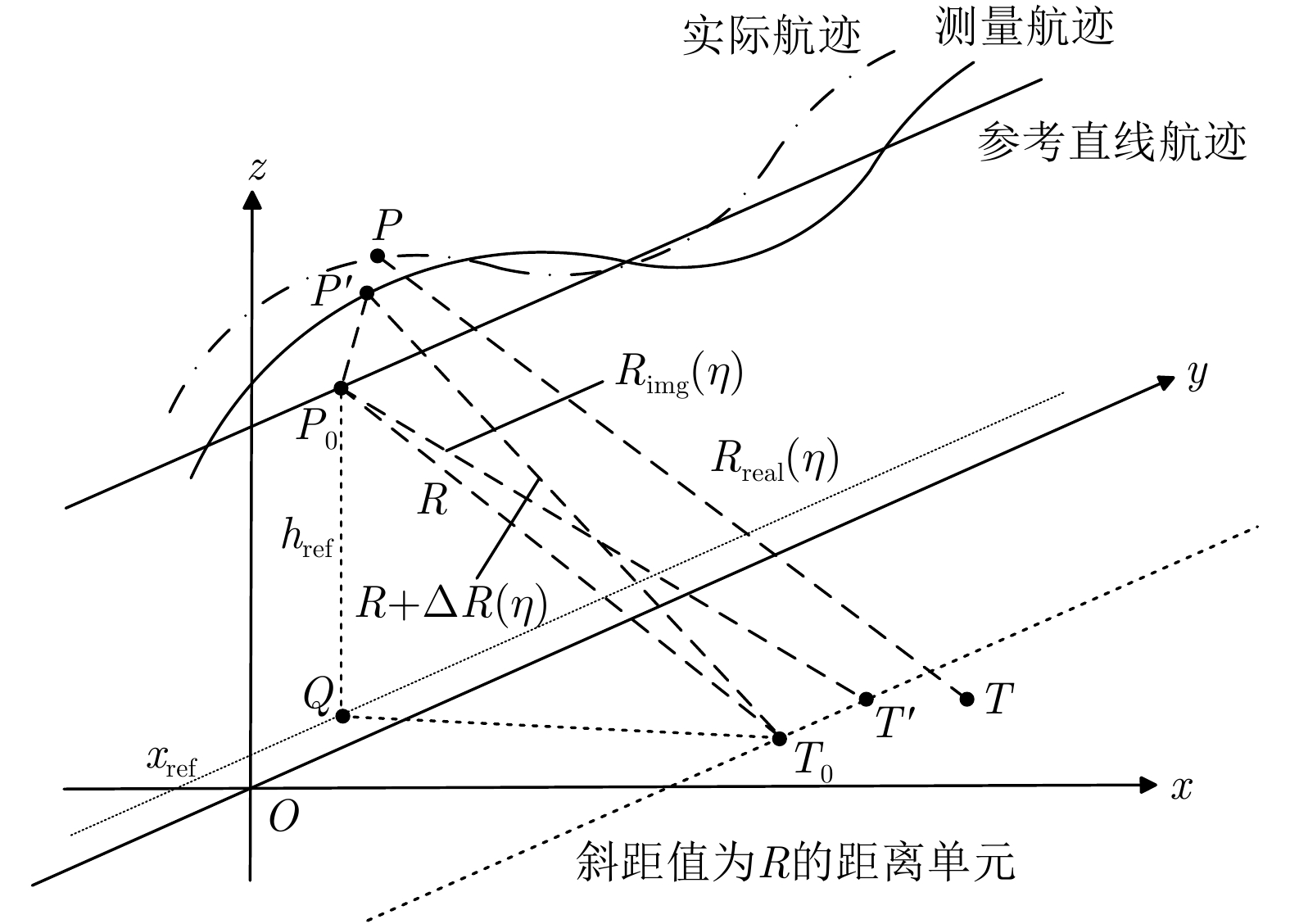
摘要: 机载合成孔径雷达(SAR)定位误差不仅受载机位置/速度测量误差、系统时间误差等的影响,还与运动补偿残余误差有关。然而现有机载SAR定位模型很少考虑运动补偿误差的影响。该文针对实际中普遍存在的含运动误差和载机航迹测量误差的情况,结合运动补偿和频域成像算法,推导了机载SAR图像定位误差传递模型,阐明了运动补偿残余误差影响下航迹测量误差对定位偏差的影响方式,并基于该模型给出了载机航迹测量误差的标定方法。仿真实验验证了该定位误差传递模型的正确性,相比于不考虑运动补偿残余误差的定位模型,得到了更高精度的航迹测量误差标定结果,证明了该方法的优越性。Abstract: Airborne Synthetic Aperture Radar (SAR) location error is affected by the position/speed measurement error of the aircraft, system time error, etc., and also related to the residual error of motion compensation. However, the existing airborne SAR location model rarely considers the effect of residual motion error. Considering that motion and trajectory measurement errors are common in practice, this paper derives a location error transfer model of an airborne SAR image based on the motion compensation and frequency-domain imaging algorithms. The proposed model clarifies the influence of trajectory measurement error on location deviation when residual motion error exists and provides a method of error calibration measurement. The simulation experiments validate the correctness of the proposed location error transfer model. The present method obtains a more accurate error calibration measurement result than the location error model that does not consider the residual motion error, proving the superiority of the proposed model.
-
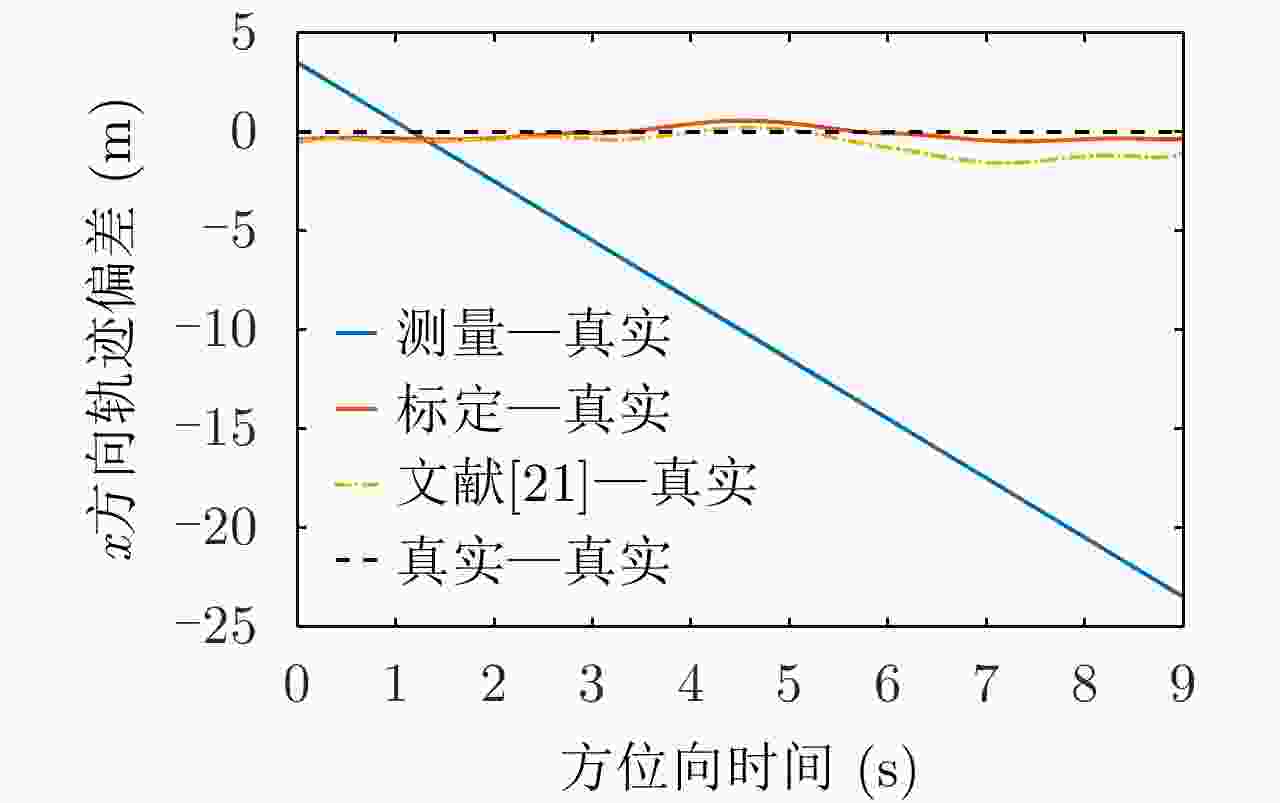
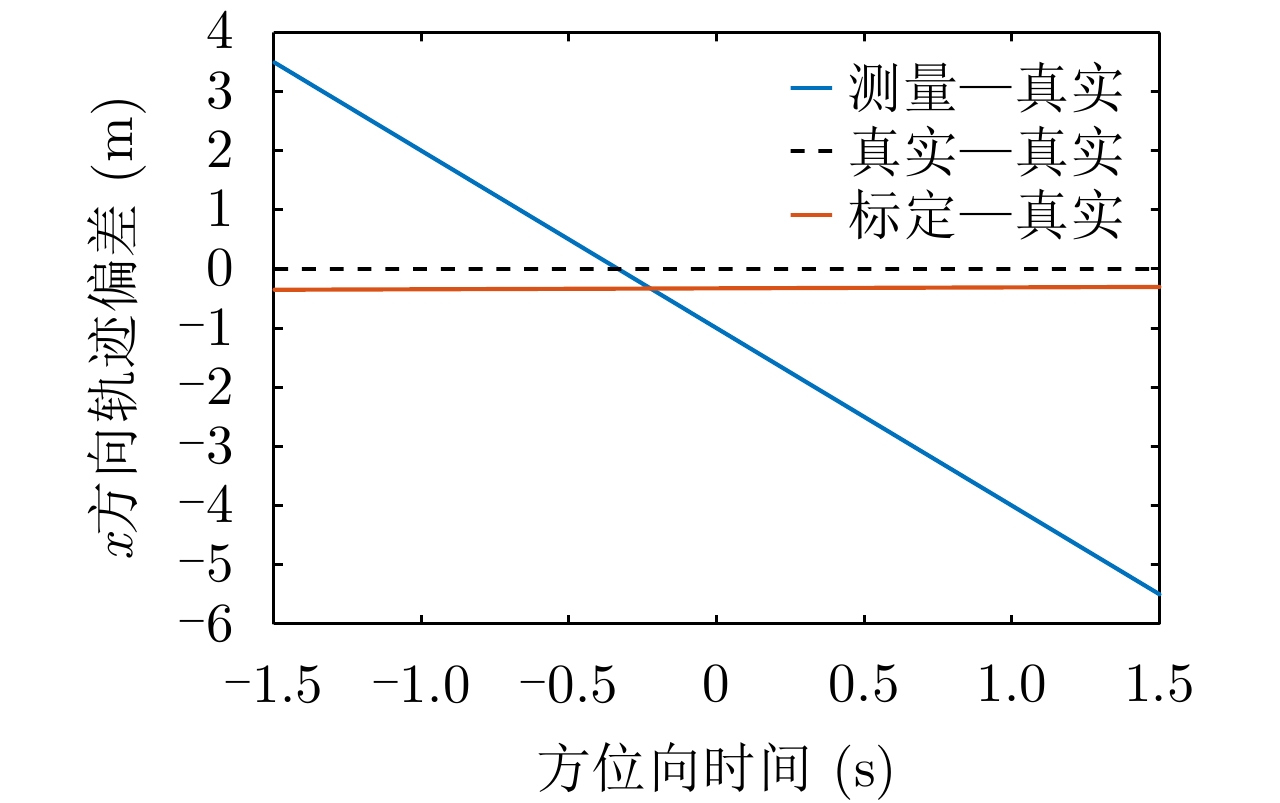
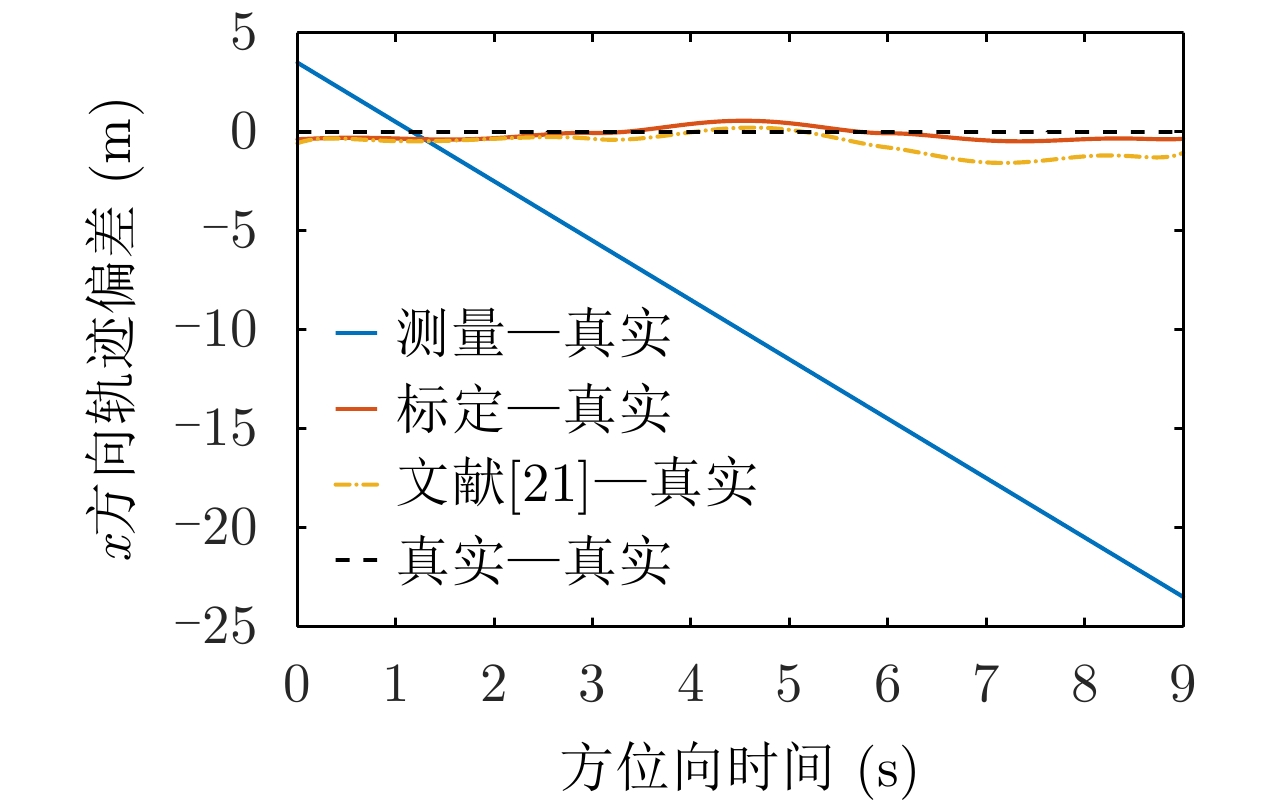
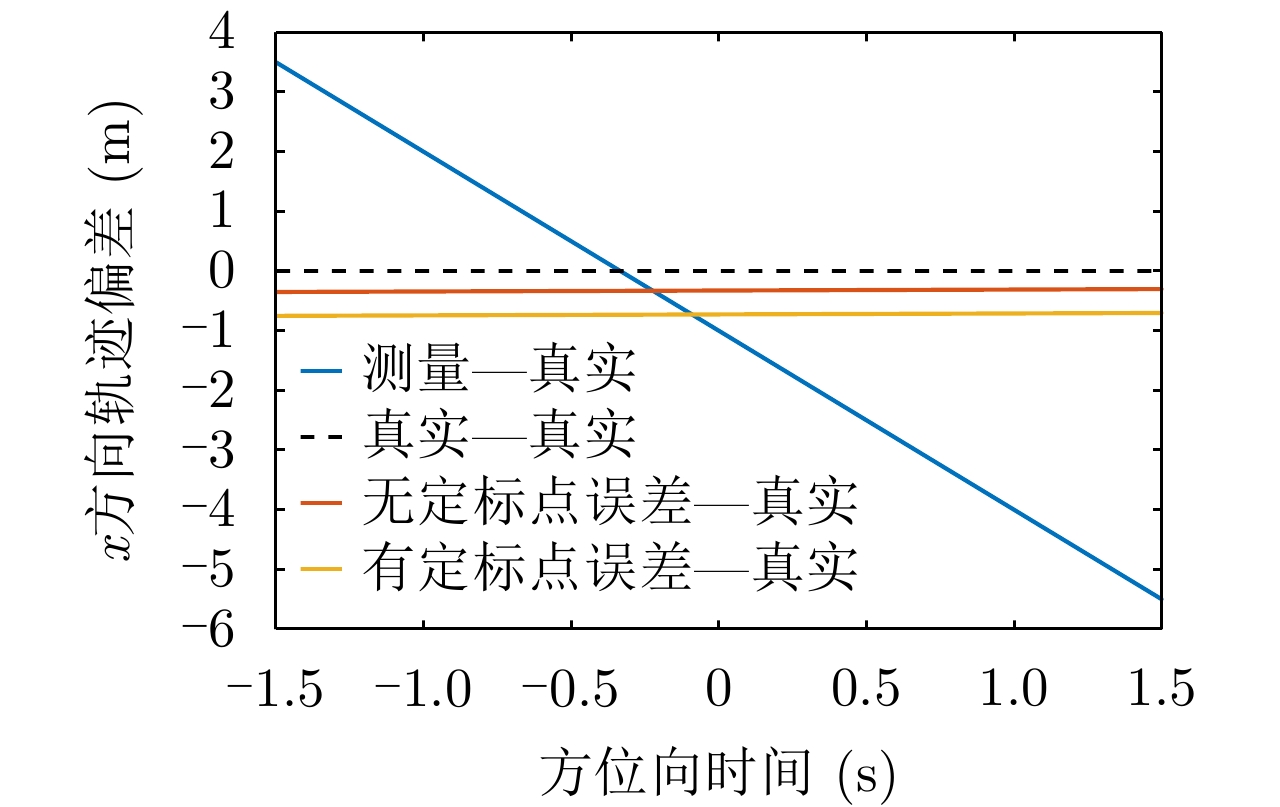
图 13 x方向整条航迹偏差对比图
Figure 13. Contrastive diagram of deviation of the whole trajectory in x direction
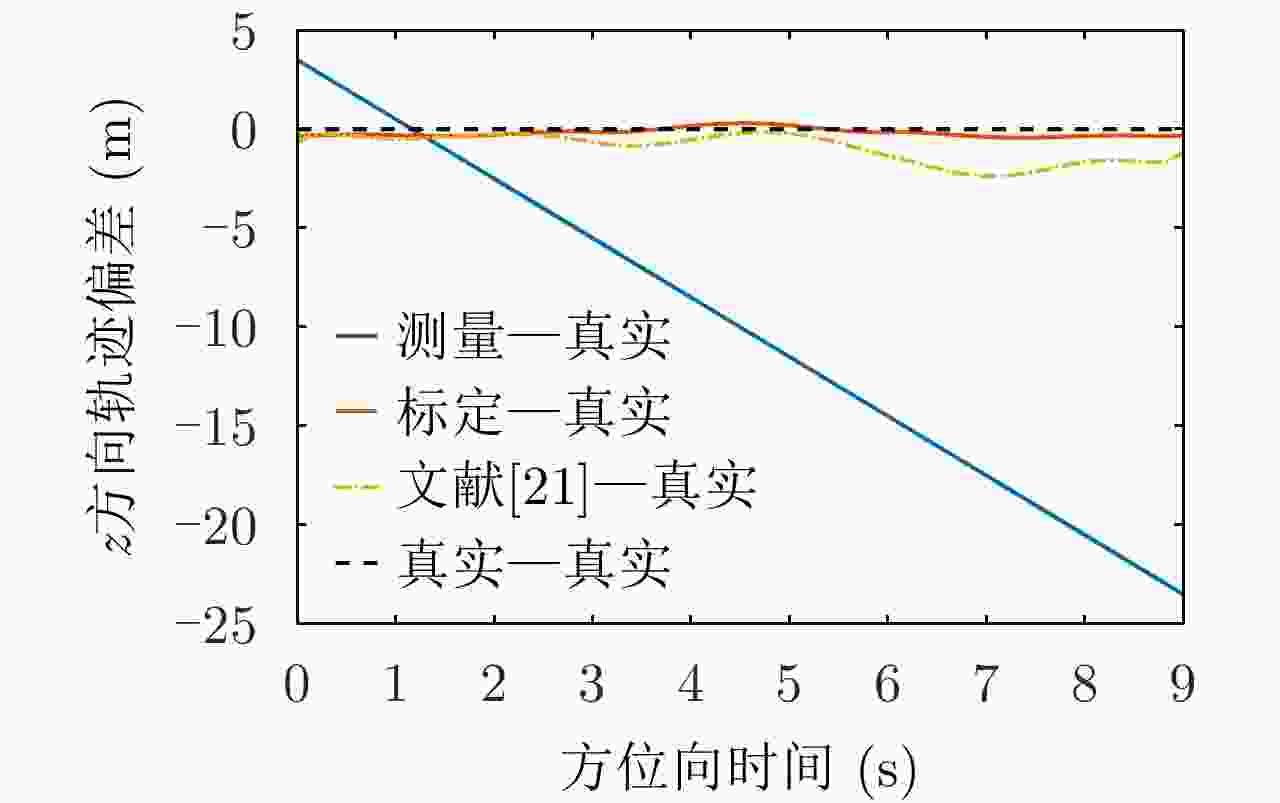
图 14 z方向整条航迹偏差对比图
Figure 14. Contrastive diagram of deviation of the whole trajectory in z direction
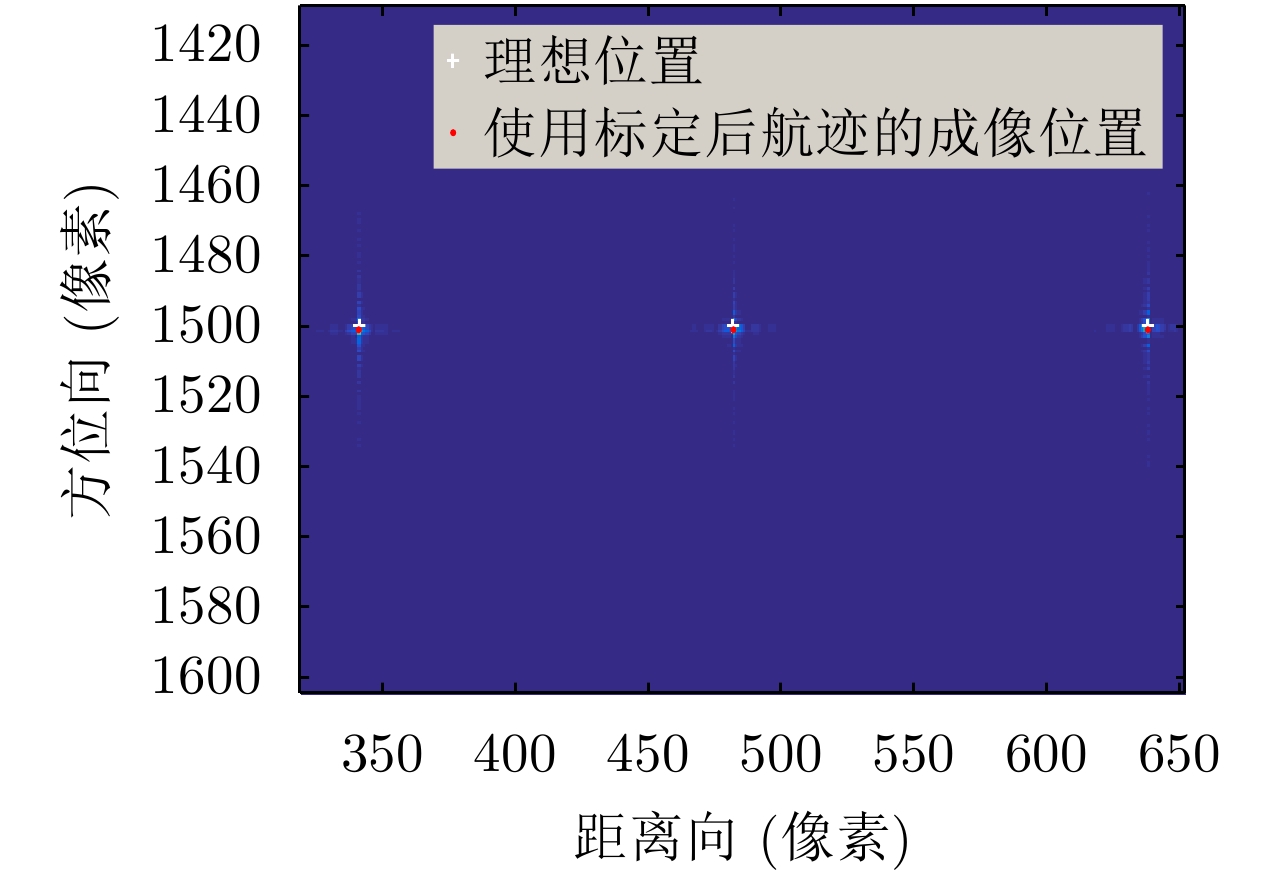
表 1 定位误差仿真参数
Table 1. Simulation parameters of location error
参数 数值 载波频率(${\rm{GHz}}$) $30$ 信号带宽(${\rm{MHz}}$) ${\rm{2}}00$ 脉冲持续时间(μs) $1$ 脉冲重复频率(${\rm{Hz}}$) $1000$ 方位向天线尺寸(${\rm{m}}$) ${\rm{2}}$ 平台速度(${\rm{m}}{\rm{/}}{\rm{s}}$) $70$ 斜视角(°) $0$ 目标点1坐标(${\rm{m}}$) $(330,0,0)$ 目标点2坐标(${\rm{m}}$) $(400,0,0)$ 目标点3坐标(${\rm{m}}$) $(470,0,0)$  下载: 导出CSV
下载: 导出CSV
表 2
${\boldsymbol{y}} $ 方向定位误差Table 2. Location error in y direction
目标点 实际定位误差 公式算得误差 两误差的偏差 目标点1 (m) –4.5500 –4.5254 –0.0246 目标点2 (m) –1.6100 –1.6270 0.0170 目标点3 (m) 1.3300 1.3030 0.0270
下载: 导出CSV
表 3
${\boldsymbol{x}} $ 方向定位误差Table 3. Location error in x direction
目标点 实际定位误差 公式算得误差 两误差的偏差 目标点1 (m) 3.4980 3.4192 0.0788 目标点2 (m) 1.2034 1.0431 0.1603 目标点3 (m) –0.4437 –0.6014 0.1577
下载: 导出CSV
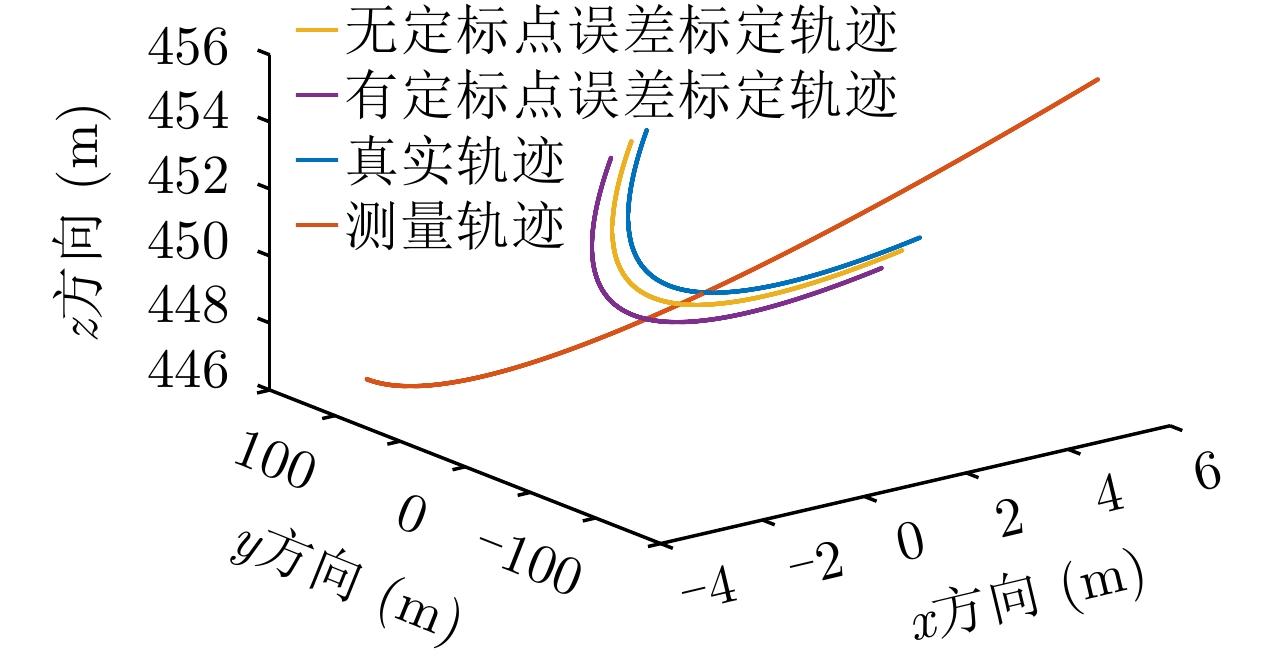
表 4 测量误差标定结果
Table 4. Calibration results of measurement error
方向 测量航迹 真实航迹 标定出的测量误差 标定航迹 x方向 ${\eta ^2} - 3\eta - 1$ ${\eta ^2}$ $ - 3.0161\eta - 0.6755$ ${\eta ^2} + 0.0161\eta - 0.3245$ z方向 ${\eta ^2} - 3\eta + 449$ ${\eta ^2} + 450$ $ - 3.0113\eta - 0.7585$ ${\eta ^2} + 0.0113\eta $$ + 449.7585$
下载: 导出CSV
表 5 测量误差标定结果
Table 5. Calibration results of measurement error
方向 测量航迹 真实航迹 标定出的测量误差 标定航迹 x方向 ${\eta ^2} - 3\eta - 1$ ${\eta ^2}$ $ - 3.0161\eta - 0.{\rm{2751}}$ ${\eta ^2} + 0.0161\eta - 0.{\rm{7249}}$ z方向 ${\eta ^2} - 3\eta + 449$ ${\eta ^2} + 450$ $ - 3.0{\rm{222}}\eta - 0.{\rm{3882}}$ ${\eta ^2} + 0.0{\rm{222}}\eta $$ + 449.{\rm{3882}}$
下载: 导出CSV
-
[1] 郑波浪. 机载高分辨率合成孔径雷达运动补偿研究[D]. [硕士论文], 中国科学院电子学研究所, 2006.ZHENG Bolang. A research on motion compensation of high-resolution airborne SAR[D]. [Master dissertation], Institute of Electronics, Chinese Academy of Sciences, 2006. [2] CANTALLOUBE H M J and NAHUM C E. Airborne SAR-efficient signal processing for very high resolution[J]. Proceedings of the IEEE, 2013, 101(3): 784–797. doi: 10.1109/JPROC.2012.2232891 [3] 苗慧. 机载SAR定位精度的研究[D]. [博士论文], 中国科学院电子学研究所, 2007.MIAO Hui. Research on airborne SAR geolocation accuracy[D]. [Ph. D dissertation], Institute of Electronics, Chinese Academy of Sciences, 2007. [4] 高祥武, 黄广民, 杨汝良. 机载SAR目标快速定位方法和定位精度分析[J]. 现代雷达, 2004, 26(9): 4–7. doi: 10.3969/j.issn.1004-7859.2004.09.002GAO Xiangwu, HUANG Guangmin, and YANG Ruliang. Study on a fast target location method for airborne SAR and location precision analysis[J]. Modern Radar, 2004, 26(9): 4–7. doi: 10.3969/j.issn.1004-7859.2004.09.002 [5] 彭代强, 林幼权, 杜鹏飞. 机载SAR图像快速经纬度计算及精度分析[J]. 现代雷达, 2010, 32(3): 48–52, 79. doi: 10.3969/j.issn.1004-7859.2010.03.013PENG Daiqiang, LIN Youquan, and DU Pengfei. A fast algorithm for latitude and longitude calculation of airborne SAR and its location precision analysis[J]. Modern Radar, 2010, 32(3): 48–52, 79. doi: 10.3969/j.issn.1004-7859.2010.03.013 [6] LIU Junbin, QIU Xiaolan, HUANG Lijia, et al. Curved-path SAR geolocation error analysis based on BP algorithm[J]. IEEE Access, 2019, 7: 20337–20345. doi: 10.1109/ACCESS.2019.2897361 [7] XING Mengdao, JIANG Xiuwei, WU Renbiao, et al. Motion compensation for UAV SAR based on raw radar data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(8): 2870–2883. doi: 10.1109/TGRS.2009.2015657 [8] DE MACEDO K A C and SCHEIBER R. Precise topography- and aperture-dependent motion compensation for airborne SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2005, 2(2): 172–176. doi: 10.1109/LGRS.2004.842465 [9] MAO Yongfei, XIANG Maosheng, WEI Lideng, et al. Error analysis of SAR motion compensation[C]. 2012 IEEE International Conference on Imaging Systems and Techniques Proceedings, Manchester, UK, 2012: 377–380. doi: 10.1109/IST.2012.6295562. [10] 李芳芳, 仇晓兰, 孟大地, 等. 机载双天线InSAR运动补偿误差的影响分析[J]. 电子与信息学报, 2013, 35(3): 559–567. doi: 10.3724/SP.J.1146.2012.00850LI Fangfang, QIU Xiaolan, MENG Dadi, et al. Effects of motion compensation errors on performance of airborne dual-antenna InSAR[J]. Journal of Electronics &Information Technology, 2013, 35(3): 559–567. doi: 10.3724/SP.J.1146.2012.00850 [11] PRATS P, REIGBER A, MALLORQUI J J, et al. Efficient detection and correction of residual motion errors in airborne SAR interferometry[C]. IGARSS 2004. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004: 992–995. doi: 10.1109/IGARSS.2004.1368576. [12] REIGBER A, PRATS P, and MALLORQUI J J. Refined estimation of time-varying baseline errors in airborne SAR interferometry[J]. IEEE Geoscience and Remote Sensing Letters, 2006, 3(1): 145–149. doi: 10.1109/LGRS.2005.860482 [13] 刘云龙, 李焱磊, 周良将, 等. 一种机载SAR快速几何精校正算法[J]. 雷达学报, 2016, 5(4): 419–424. doi: 10.12000/JR16064LIU Yunlong, LI Yanlei, ZHOU Liangjiang, et al. A fast precise geometric calibration method for airborne SAR[J]. Journal of Radars, 2016, 5(4): 419–424. doi: 10.12000/JR16064 [14] REIGBER A, ALIVIZATOS E, POTSIS A, et al. Extended wavenumber-domain synthetic aperture radar focusing with integrated motion compensation[J]. IEE Proceedings-Radar, Sonar and Navigation, 2006, 153(3): 301–310. doi: 10.1049/ip-rsn:20045087 [15] MOREIRA A, MITTERMAYER J, and SCHEIBER R. Extended chirp scaling algorithm for air- and spaceborne SAR data processing in stripmap and ScanSAR imaging modes[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(5): 1123–1136. doi: 10.1109/36.536528 [16] 孟大地. 机载合成孔径雷达运动补偿算法研究[D]. [博士论文], 中国科学院电子学研究所, 2006.MENG Dadi. Research on motion compensation algorithm for airborne SAR[D]. [Ph. D dissertation], Institute of Electronics, Chinese Academy of Sciences, 2006. [17] YANG Mingdong, ZHU Daiyin, and SONG Wei. Comparison of two-step and one-step motion compensation algorithms for airborne synthetic aperture radar[J]. Electronics Letters, 2015, 51(14): 1108–1110. doi: 10.1049/el.2015.1350 [18] FORNARO G, FRANCESCHETTI G, and PERNA S. On center-beam approximation in SAR motion compensation[J]. IEEE Geoscience and Remote Sensing Letters, 2006, 3(2): 276–280. doi: 10.1109/LGRS.2005.863391 [19] 曾乐天, 邢孟道, 陈士超. 基于窄波束和平地假设的运动补偿方向研究[J]. 电子与信息学报, 2014, 36(10): 2464–2468. doi: 10.3724/SP.J.1146.2013.01671ZENG Letian, XING Mengdao, and CHEN Shichao. The research on the direction of motion compensation according to the narrow beam and flat earth hypothesis[J]. Journal of Electronics &Information Technology, 2014, 36(10): 2464–2468. doi: 10.3724/SP.J.1146.2013.01671 [20] 杨鸣冬, 俞翔, 朱岱寅. 基于距离子带的机载SAR高精度多级空变运动补偿[J]. 航空学报, 2018, 39(2): 321557. doi: 10.7527/S1000-6893.2017.21557YANG Mingdong, YU Xiang, and ZHU Daiyin. High-precision space-variant motion compensation with multi-level processing for airborne SAR based on subswath[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(2): 321557. doi: 10.7527/S1000-6893.2017.21557 [21] 柳俊斌. 弱导航信息下的SAR自主定位与航迹修正技术研究[D]. [硕士论文], 中国科学院空天信息创新研究院, 2020.LIU Junbin. Research on SAR autonomous positioning and track correction technology under weak navigation information[D]. [Master dissertation], Aerospace Information Research Institute, Chinese Academy of Sciences, 2020. [22] 孙立军, 刘鑫, 刘兴春. 关于差分GPS精度的分析[C]. 第十届东北三省测绘学术与信息交流会论文集, 漠河, 2009.SUN Lijun, LIU Xin, and LIU Xingchun. Analysis on the accuracy of differential GPS-DGPS[C]. The 10th Academic and Information Exchange Meeting of Surveying and Mapping in Northeast China, Mohe, China, 2009. [23] BAMLER R and EINEDER M. Accuracy of differential shift estimation by correlation and split-bandwidth interferometry for wideband and delta-k SAR systems[J]. IEEE Geoscience and Remote Sensing Letters, 2005, 2(2): 151–155. doi: 10.1109/LGRS.2004.843203 -







计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

