
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
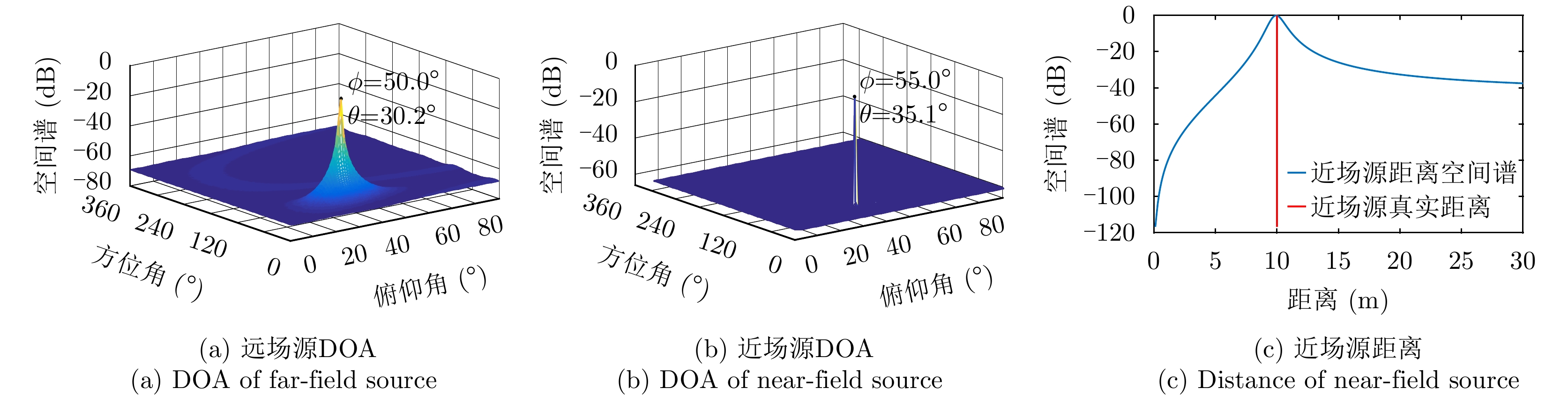
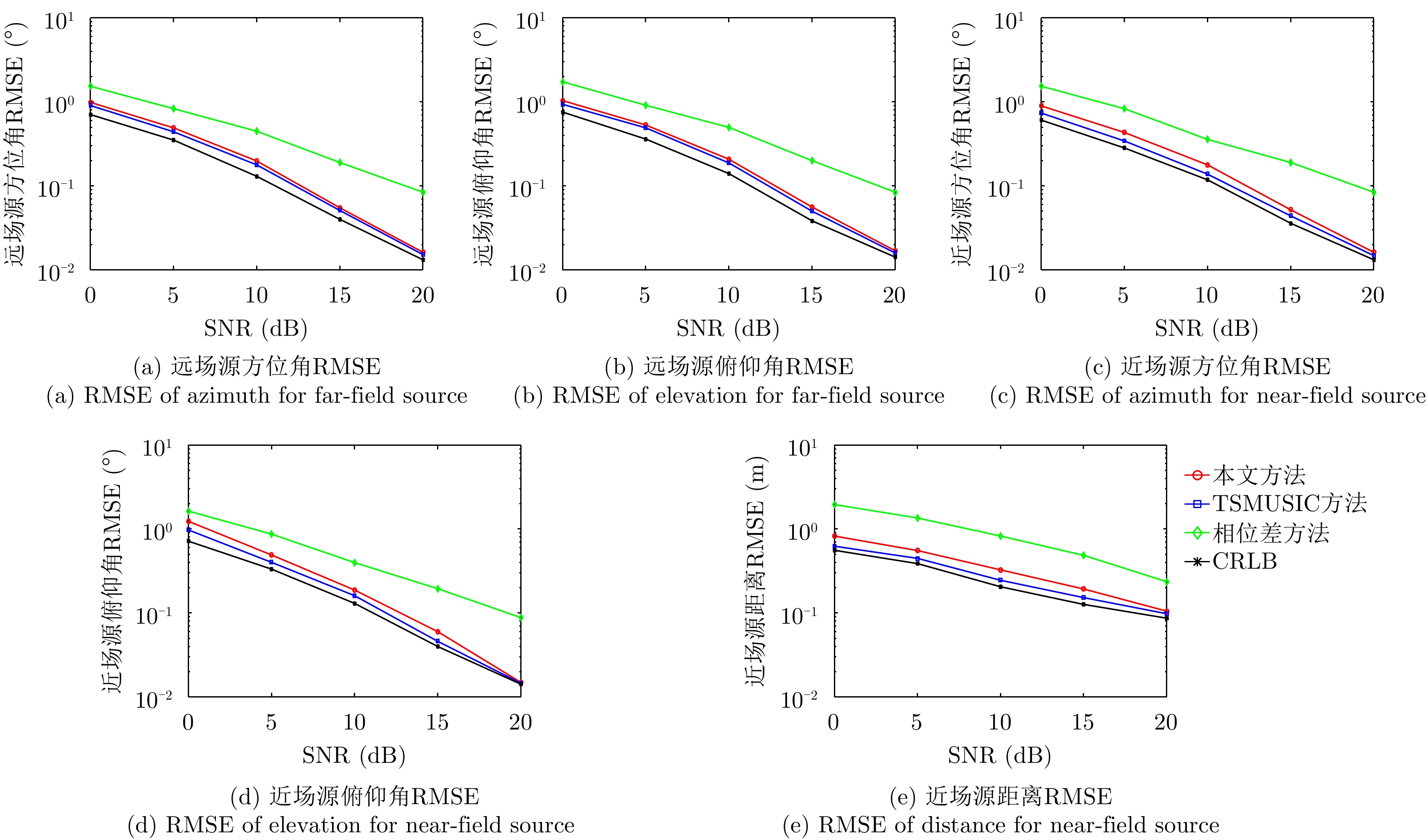
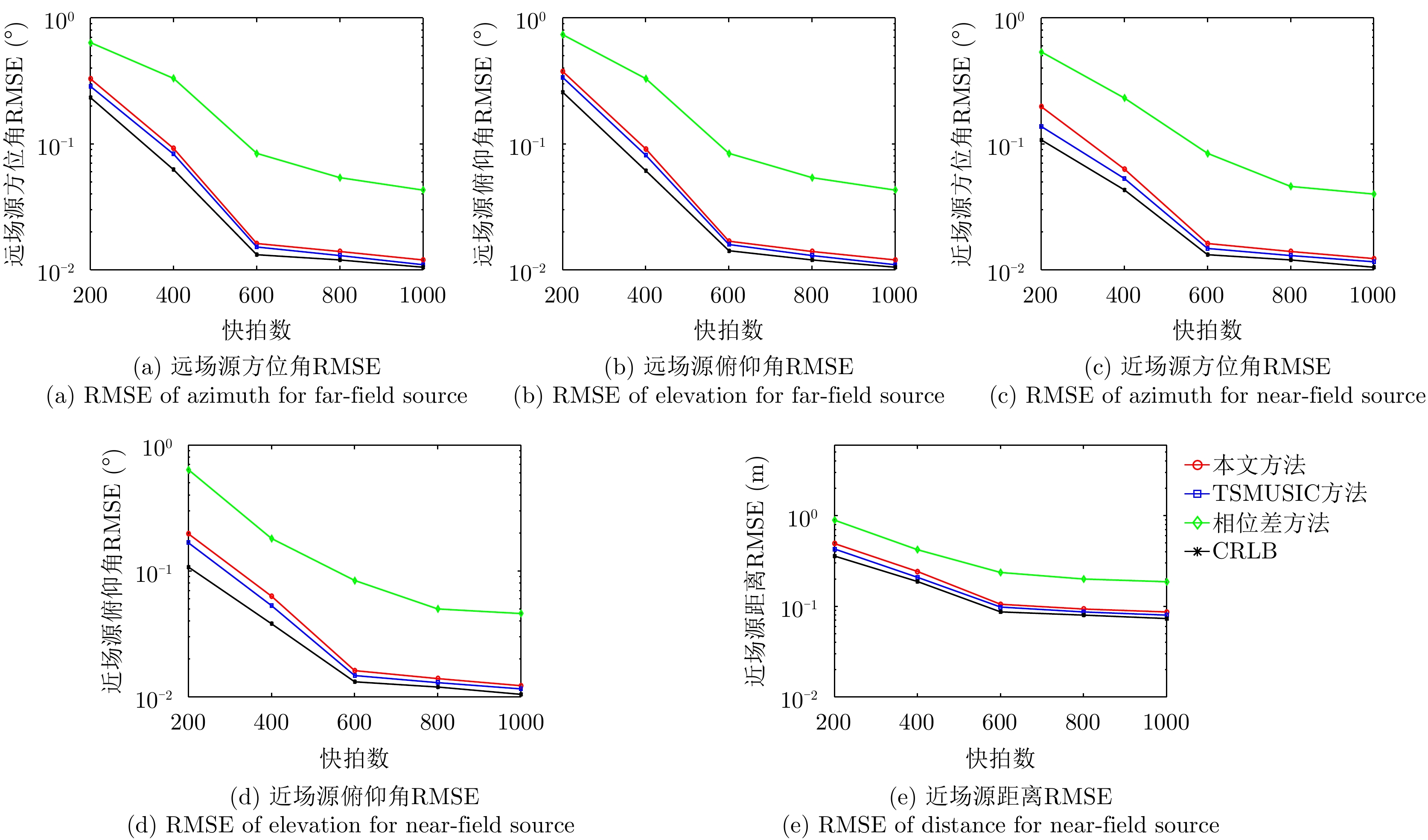
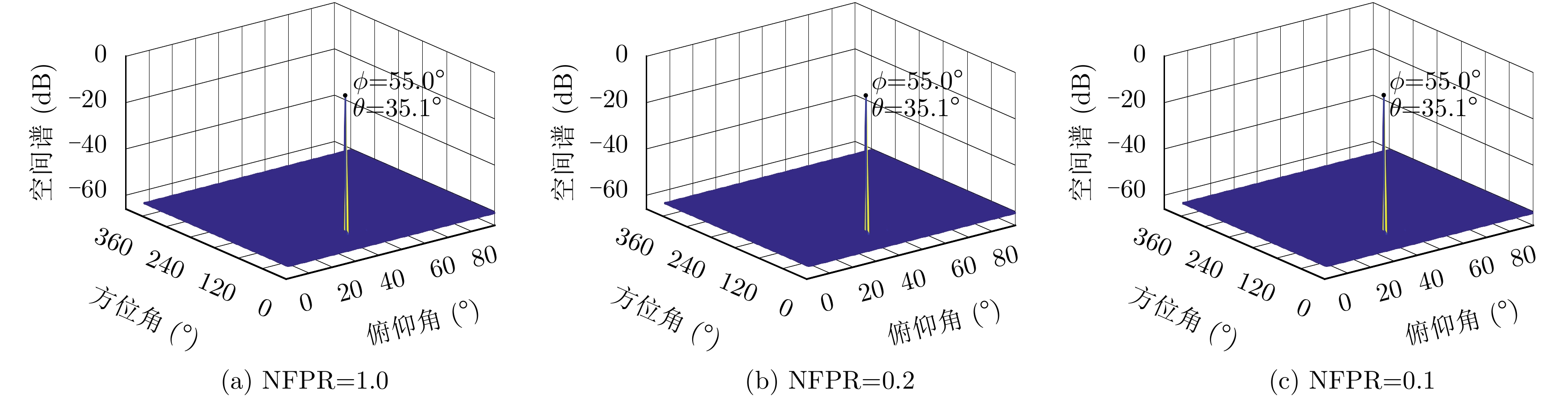
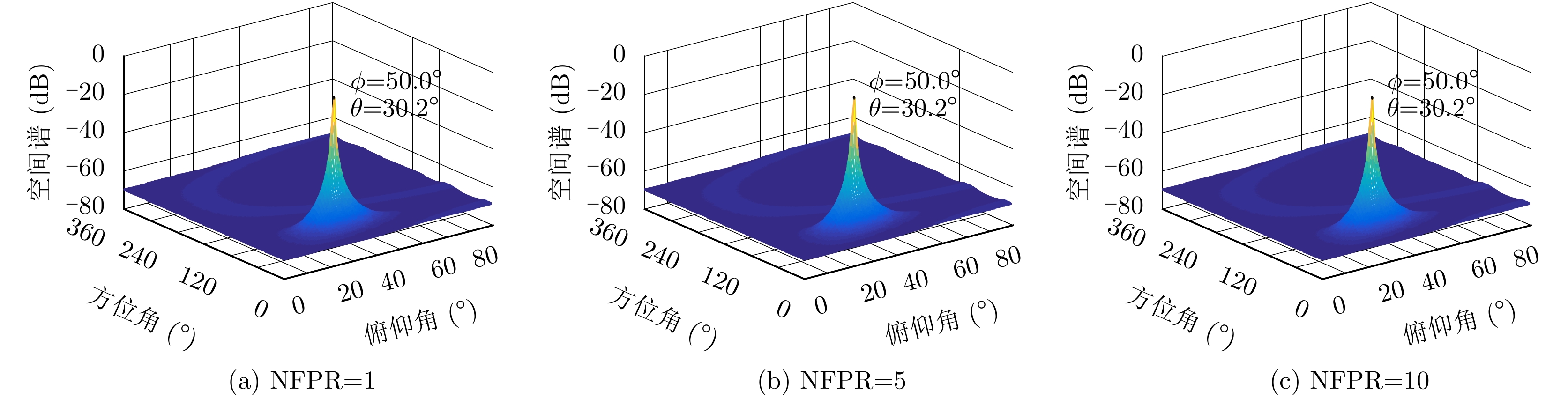
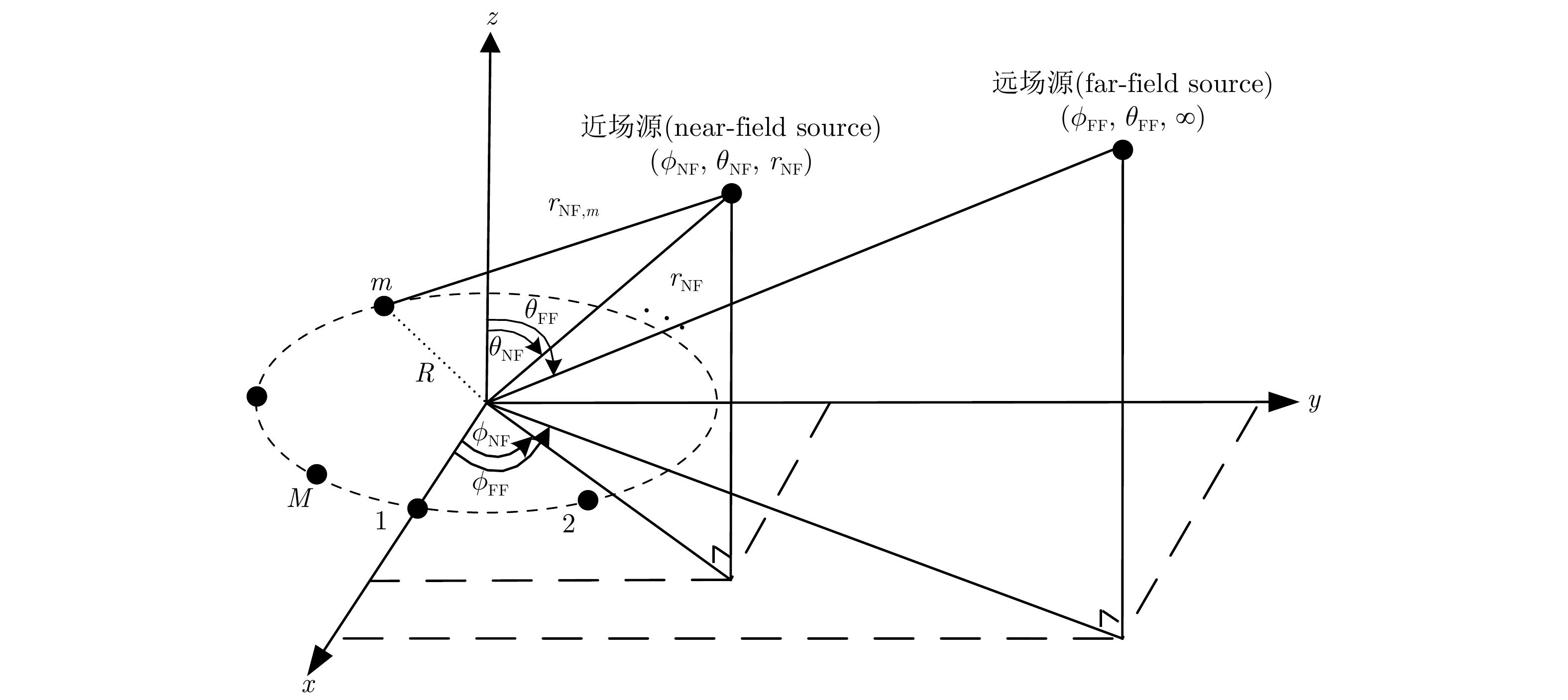
摘要: 混合源定位在无源雷达中发挥着重要作用。针对均匀圆阵下基于相位差方法的定位精度较低的问题,该文提出基于矩阵差分的远场和近场混合源定位方法。首先,利用二维多重信号(2-D MUSIC)分类方法估计出远场源的方位角和俯仰角;随后,利用协方差矩阵差分方法提取出近场源差分矩阵,通过改进的类旋转不变估计信号参数(ESPRIT-like)方法计算出近场源的方位角和俯仰角;进一步地,利用一维多重信号分类方法估计出近场源的距离;最后通过仿真实验对该文所提算法进行验证。该文所提算法在远场源和近场源角度相同的情况下能够有效地识别混合源,并且提高混合源参数估计精度。实验结果表明该算法在信噪比(SNR)为20 dB时,近场源的二维DOA估计误差接近0.01°,而近场源的距离误差接近0.1 m。Abstract: Mixed source localization plays an important role in passive radars. Aiming at the problem of low accuracy via phase difference method under a uniform circular array, this paper proposes a matrix differencing method for mixed far-field and near-field source localization. First, a two-dimensional MUltiple SIgnal Classification (MUSIC) method was utilized to estimate the azimuth and elevation angles of far-field sources. Thereafter, the covariance matrix difference method was exploited to extract the difference matrix of near-field sources. The azimuth and elevation angles of the far-field sources were estimated using the Estimation of Signal Parameters via Rotational Invariance Techniques-like (ESPRIT-like) method. Furthermore, the distance of the near-field sources was obtained by the one-dimensional MUSIC method. Finally, simulations were performed to verify the performance of the proposed algorithm. The proposed algorithm could effectively identify the mixed source when the two-dimensional Direction-Of-Arrival (DOA) of the far-field and near-field sources were the same. Moreover, the proposed algorithm could improve the accuracy of the mixed source parameter estimation. Results show that when the signal-to-noise ratio was set to 20 dB, the 2-D DOA estimation error of the near-field source was approximately 0.01°, and the distance error of the near-field source was approximately 0.1 m.
-

图 2 基于协方差矩阵差分的混合源定位方法流程图
Figure 2. Flow chart of the mixed source localization based on the covariance differencing method
-
[1] 吴癸周, 郭福成, 张敏. 信号直接定位技术综述[J]. 雷达学报, 2020, 9(6): 998–1013. doi: 10.12000/JR20040WU Guizhou, GUO Fucheng, and ZHANG Min. Direct position determination: An overview[J]. Journal of Radars, 2020, 9(6): 998–1013. doi: 10.12000/JR20040 [2] 周成伟, 郑航, 顾宇杰, 等. 互质阵列信号处理研究进展: 波达方向估计与自适应波束成形[J]. 雷达学报, 2019, 8(5): 558–577. doi: 10.12000/JR19068ZHOU Chengwei, ZHENG Hang, GU Yujie, et al. Research progress on coprime array signal processing: Direction-of-arrival estimation and adaptive beamforming[J]. Journal of Radars, 2019, 8(5): 558–577. doi: 10.12000/JR19068 [3] 宋嘉奇, 陶海红. 近场非圆信号参数快速估计算法[J]. 雷达学报, 2020, 9(4): 632–639. doi: 10.12000/JR20053SONG Jiaqi and TAO Haihong. A fast parameter estimation algorithm for near-field non-circular signals[J]. Journal of Radars, 2020, 9(4): 632–639. doi: 10.12000/JR20053 [4] ZUO Weiliang, XIN Jingmin, LIU Wenyi, et al. Localization of near-field sources based on linear prediction and oblique projection operator[J]. IEEE Transactions on Signal Processing, 2019, 67(2): 415–430. doi: 10.1109/TSP.2018.2883034 [5] HE Jin, SWAMY M N S, and AHMAD M O. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources[J]. IEEE Transactions on Signal Processing, 2012, 60(4): 2066–2070. doi: 10.1109/TSP.2011.2180902 [6] ZUO Weiliang, XIN Jingmin, ZHENG Nanning, et al. Subspace-based localization of far-field and near-field signals without eigendecomposition[J]. IEEE Transactions on Signal Processing, 2018, 66(17): 4461–4476. doi: 10.1109/TSP.2018.2853124 [7] ZHENG Zhi, FU Mingcheng, WANG Wenqin, et al. Localization of mixed near-field and far-field sources using symmetric double-nested arrays[J]. IEEE Transactions on Antennas and Propagation, 2019, 67(11): 7059–7070. doi: 10.1109/TAP.2019.2925199 [8] LIU Guohong and SUN Xiaoying. Spatial differencing method for mixed far-field and near-field sources localization[J]. IEEE Signal Processing Letters, 2014, 21(11): 1331–1335. doi: 10.1109/LSP.2014.2326173 [9] XIE Jian, TAO Haihong, RAO Xuan, et al. Localization of mixed far-field and near-field sources under unknown mutual coupling[J]. Digital Signal Processing, 2016, 50: 229–239. doi: 10.1016/j.dsp.2015.10.012 [10] WANG Kai, WANG Ling, SHANG Jingrui, et al. Mixed near-field and far-field source localization based on uniform linear array partition[J]. IEEE Sensors Journal, 2016, 16(22): 8083–8090. doi: 10.1109/JSEN.2016.2603182 [11] WU Yuntao, WANG Hai, ZHANG Yanbin, et al. Multiple near-field source localisation with uniform circular array[J]. Electronics Letters, 2013, 49(24): 1509–1510. doi: 10.1049/el.2013.2012 [12] JUNG T J and LEE K. Closed-Form algorithm for 3-D single-source localization with uniform circular array[J]. IEEE Antennas and Wireless Propagation Letters, 2014, 13: 1096–1099. doi: 10.1109/LAWP.2014.2327992 [13] CHEN Xin, LIU Zhen, and WEI Xizhang. Unambiguous parameter estimation of multiple near-field sources via rotating uniform circular array[J]. IEEE Antennas and Wireless Propagation Letters, 2016, 16: 872–875. doi: 10.1109/LAWP.2016.2613084 [14] 陈鑫, 刘振, 魏玺章. 基于旋转均匀圆阵的单近场源参数估计解模糊算法[J]. 电子学报, 2017, 45(3): 584–590. doi: 10.3969/j.issn.0372-2112.2017.03.012CHEN Xin, LIU Zhen, and WEI Xizhang. Ambiguity resolving in parameter estimation of a single near-field source via rotating uniform circular array[J]. Acta Electronica Sinica, 2017, 45(3): 584–590. doi: 10.3969/j.issn.0372-2112.2017.03.012 [15] SU Xiaolong, LIU Zhen, LIU Tianpeng, et al. An SOS-based algorithm for localization of multiple near-field sources using uniform circular array[J]. IEEE Sensors Letters, 2019, 3(11): 5501004. doi: 10.1109/LSENS.2019.2950196 [16] XUE Bing, FANG Guangyou, and JI Yicai. Passive localisation of mixed far-field and near-field sources using uniform circular array[J]. Electronics Letters, 2016, 52(20): 1690–1692. doi: 10.1049/el.2016.2091 [17] SU Xiaolong, LIU Zhen, CHEN Xin, et al. Mixed incoherent far-field and near-field source localization under uniform circular array[J]. Sensors, 2018, 18(5): 1432. doi: 10.3390/s18051432 -

 下载:
下载:

图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

