
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 针对雷达对海上目标探测技术研究的数据需求以及目前公开的雷达对海探测数据缺乏的问题,该文提出一项“雷达对海探测数据共享计划”,旨在利用X波段固态全相参雷达等多型雷达开展对海探测试验,获取不同海况、分辨率、擦地角条件下目标和海杂波数据,并同步获取海洋气象水文数据、目标位置与轨迹的真实数据,实现雷达实测数据的标准化、规范化管理,推进数据集公开共享,服务于海杂波特性研究,有力地支持海杂波抑制和目标检测技术研究。Abstract: To meet the radar data requirements of target detection technology research and address the lack of publicly available sea-detecting radar data, a data-sharing program for sea-detecting radar is proposed herein. The aim of the proposed data-sharing program is to conduct sea detection experiments using an X-band solidstate phase-coherent radar and other multi-type radars to obtain the target and sea clutter data under different sea conditions, resolutions, and grazing angles. Moreover, the marine meteorological and hydrological data, target position, and track data are simultaneously obtained using the proposed data-sharing program to help achieve the standardized management of radar-measured data. The proposed data-sharing program aims to promote the open sharing of data sets, serve as the basis for research on sea clutter characteristics, and facilitate the research on sea clutter suppression and target detection technology.
-
Key words:
- Radar /
- Sea detection /
- Sea clutter /
- Target detection /
- Real data sharing
-

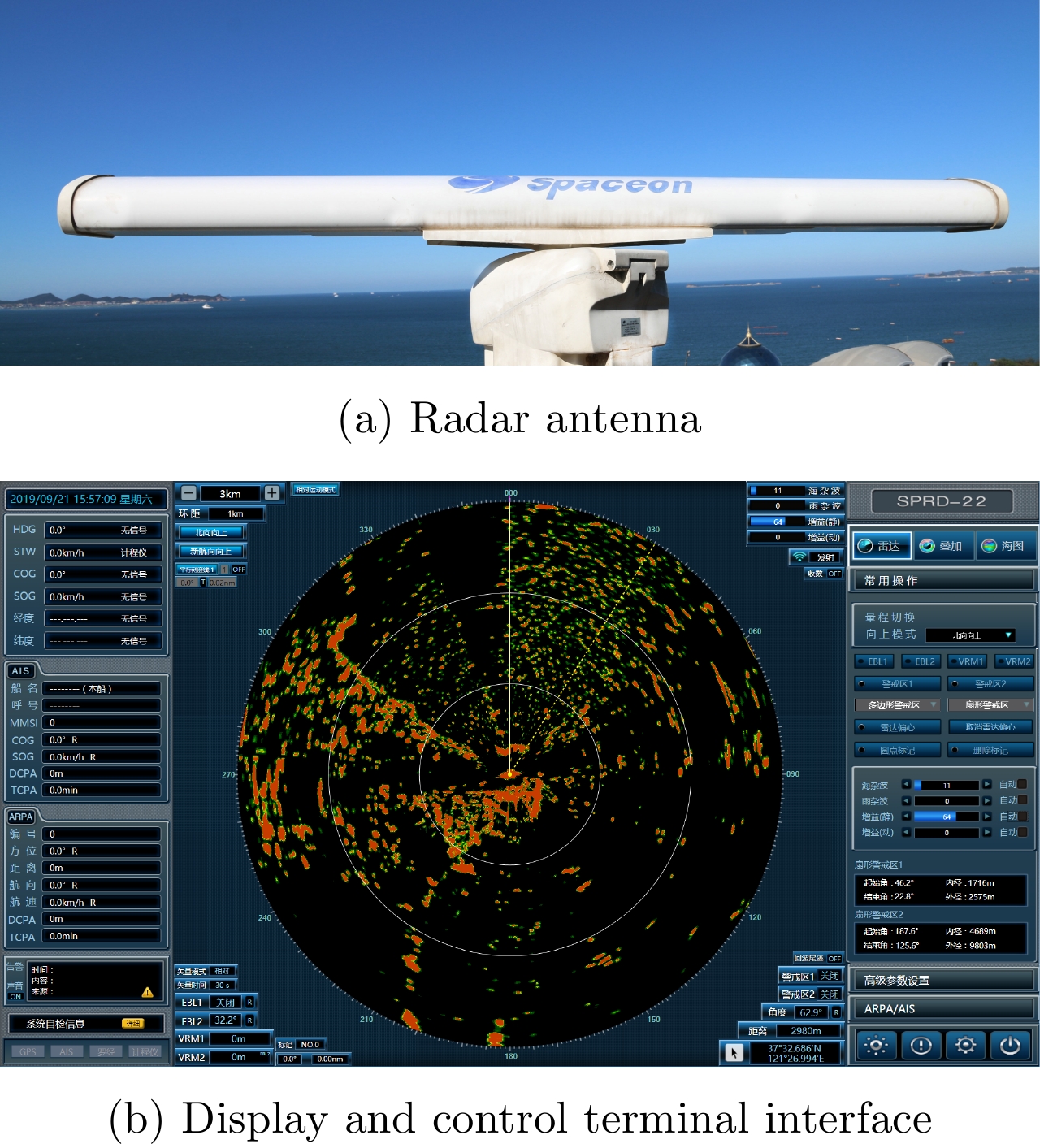
图 2 X波段固态功放监视/导航雷达
Figure 2. X band solid-state power amplifier surveillance/navigation radar
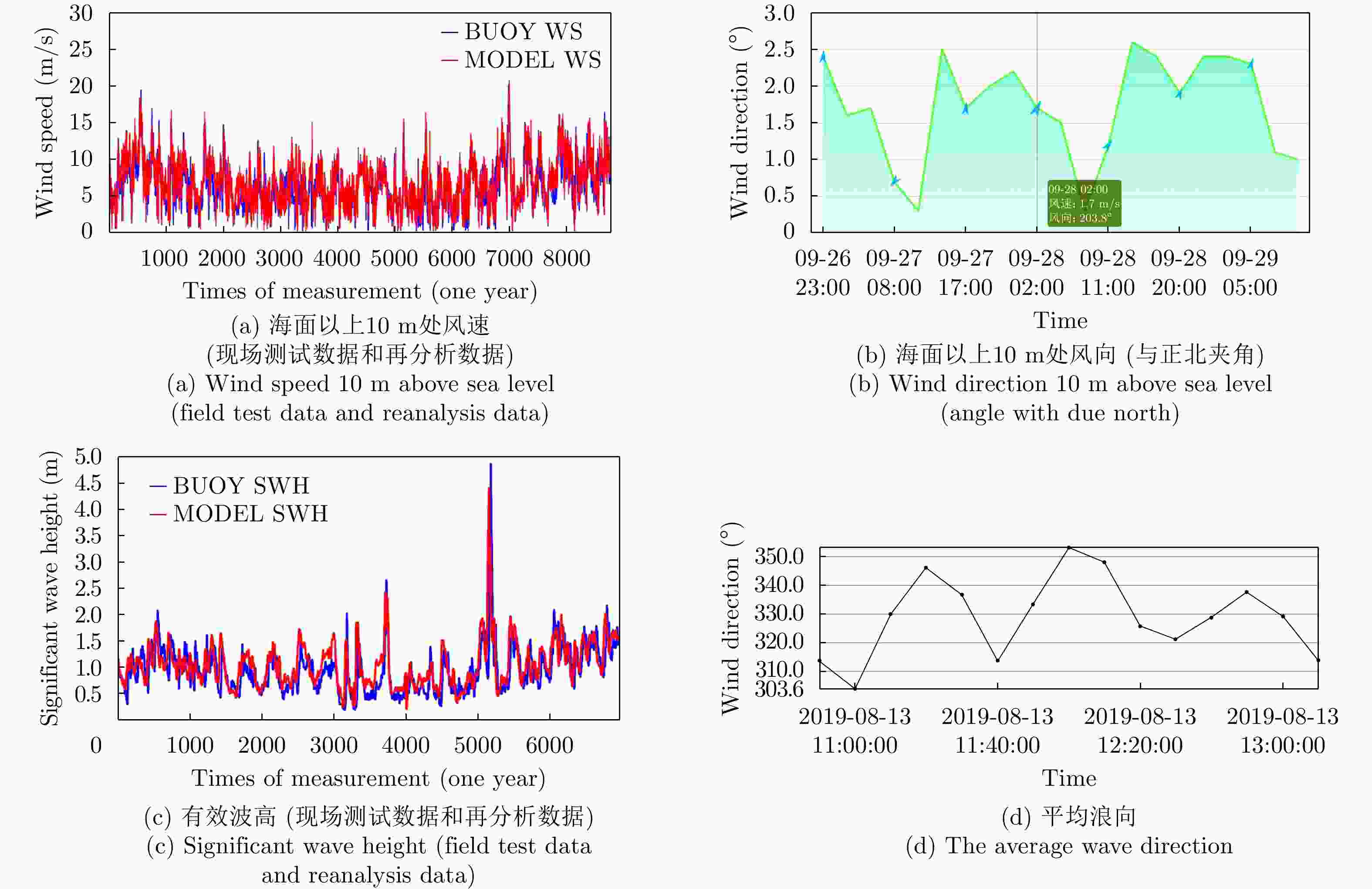
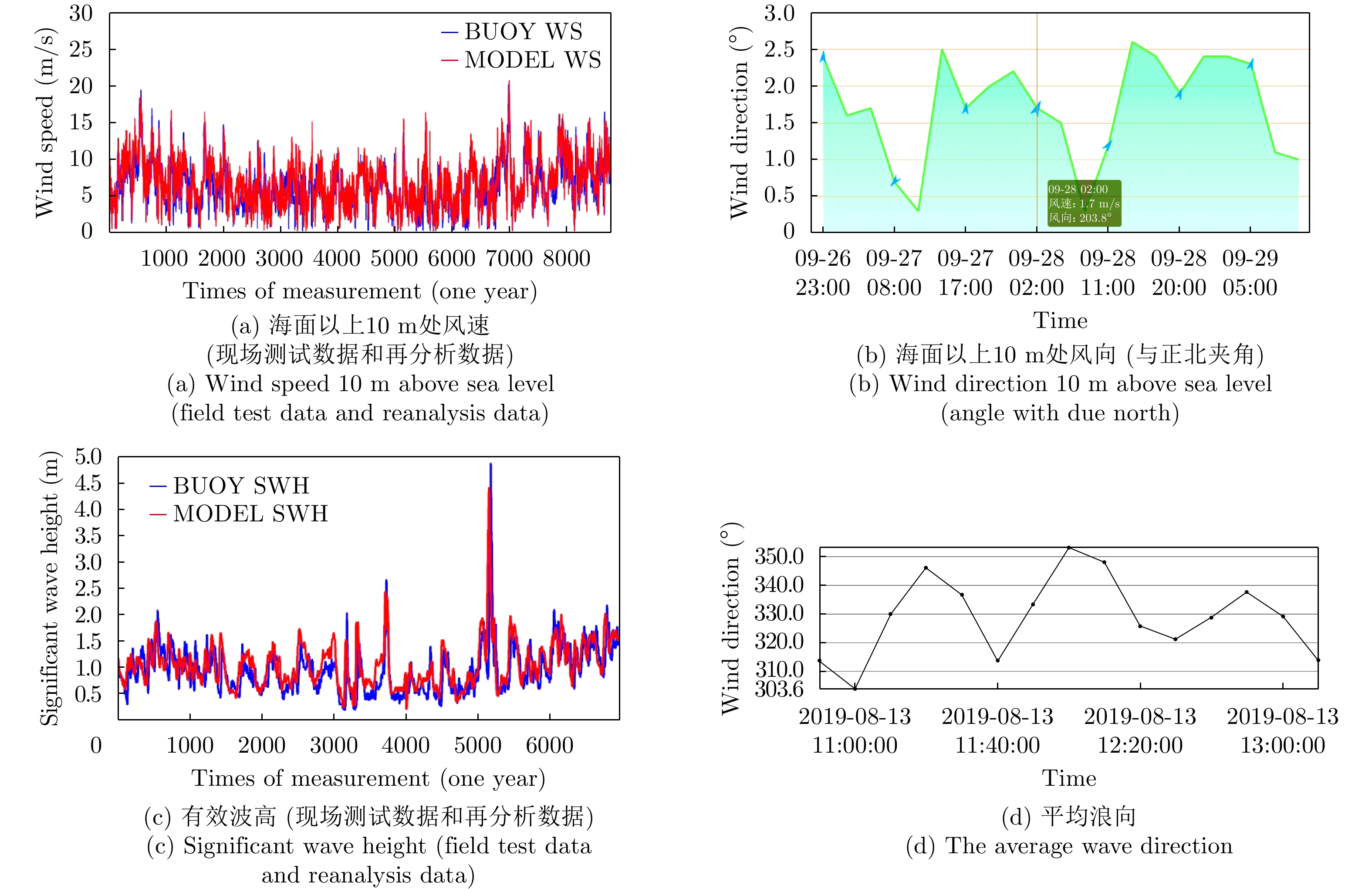
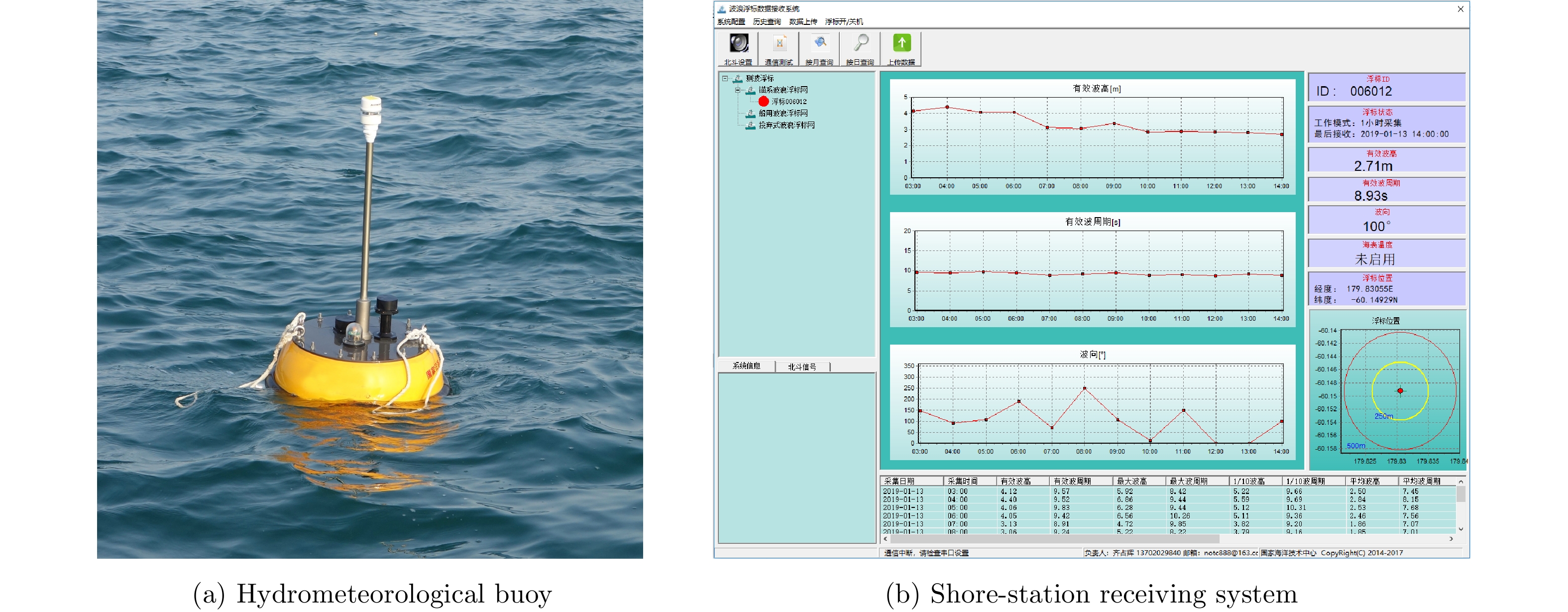
图 10 试验海域气象水文数据
Figure 10. Meteorological and hydrological datas of the experimental sea area
表 1 X波段试验雷达参数
Table 1. X-band experimental radar parameters
技术指标 参数 工作频段 X 工作频率范围 9.3~9.5 GHz 量程 0.0625~96 nm 扫描带宽 25 MHz 距离分辨率 6 m 脉冲重复频率 1.6 K, 3 K, 5 K和10 K 发射峰值功率 50 W 天线转速 2 rpm, 12 rpm, 24 rpm, 48 rpm 天线长度 1.8 m 天线工作模式 凝视、圆周扫描 天线极化方式 HH 天线水平波束宽度 1.2° 天线垂直波束宽度 22°  下载: 导出CSV
下载: 导出CSV
1 雷达对海探测数据(第1期)概况表
1. Summary table of sea-detecting radar data (the first phase)
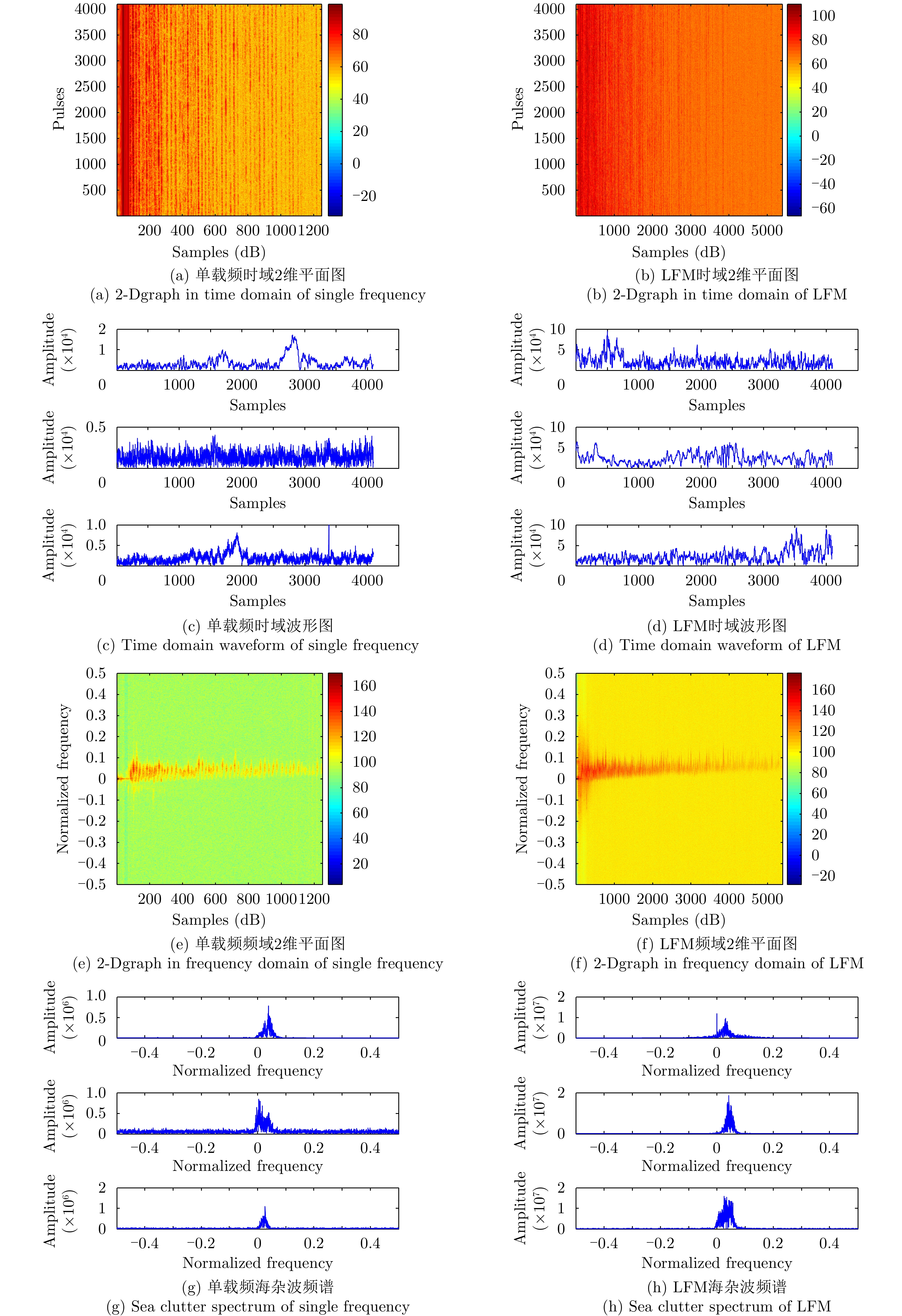
序号 海况等级 数据量 雷达天线工作模式 发射脉冲模式 区域AIS数据 气象水文数据 擦地角(°) 1 1级及以下 >10组 凝视、扫描 模式2 有 有 0.3~15 2 2级 >10组 凝视、扫描 模式2 有 有 0.3~15 3 3级 >10组 凝视、扫描 模式2 有 有 0.3~15 4 4级 >10组 凝视、扫描 模式2 有 有 0.3~15 5 5级 >5组 凝视、扫描 模式2 无 有 0.3~15 注:①每天AIS数据形成一个表格格式文件,提供船只MMSI、时间、经纬度等信息;②每天气象水文数据形成一个nc格式文件,提供风速/风向/浪高/浪向/浪周期信息;③凝视模式下一组数据包含的脉冲数不低于105个;扫描模式下一组数据包含一个完整的扫描周期;④发射脉冲模式2,对应每个重复周期雷达相继发射一个单载频脉冲和一个LFM脉冲。
下载: 导出CSV
表 1 X-band experimental radar parameters
Parameters Technical indexes Operating frequency X Scope of operating frequency 9.3-9.5 GHz Range 0.0625-96 nm Scanning bandwidth 25 MHz Range resolution 6 m Pulse repetition frequency 1.6 K, 3 K, 5 K & 10 K Emission peak power 50 W Revolving speed of antenna 2rpm, 12 rpm, 24 rpm, 48 rpm Length of antenna 1.8 m Operating mode of antenna Gazing & circular scanning Polarization mode of antenna HH Width of horizontal beam of antenna 1.2° Width of vertical beam of antenna 22°
下载: 导出CSV
1 Summary table of sea-detecting radar data (the 1st phase)
No. Grade of sea conditions Data size Working mode of radar antenna Transmission pulse mode Regional AIS data Meteorological and
hydrological dataGrazing angle (°) 1 Grade 1 and below >10 Groups Staring & scanning Mode 2 Yes Yes 0.3–15 2 Grade 2 >10 Groups Staring & scanning Mode 2 Yes Yes 0.3–15 3 Grade 3 >10 Groups Staring & scanning Mode 2 Yes Yes 0.3–15 4 Grade 4 >10 Groups Staring & scanning Mode 2 Yes Yes 0.3–15 5 Grade 5 >5 Groups Staring & scanning Mode 2 No Yes 0.3–15 Notes: ① Daily AIS data will be generated into a table format, which provides MMSI of ships, time, longitude and latitude, and others. ② Daily meteorological and hydrological data will be generated into an NC-format file, which indicates wind speed, wind direction, wave height, and cycle. ③ The number of pulses contained in a group of data under staring mode will not be less than 105, while a group of data under scanning mode contains a complete scanning cycle. ④ Under transmission pulse mode 2, radars of each corresponding repetition cycle will transmit a single-carrier frequency pulse and an LFM pulse.
下载: 导出CSV
-
[1] SKOLNIK M I. Radar Handbook[M]. 3rd ed. New York: The McGraw-Hill Companies Inc., 2008. [2] WARD K, TOUGH R, and WATTS S. Sea Clutter: Scattering, the K Distribution and Radar Performance[M]. 2nd ed. London: The Institution of Engineering and Technology, 2013. [3] WARD K D and WATTS S. Use of sea clutter models in radar design and development[J]. IET Radar,Sonar&Navigation, 2010, 4(2): 146–157. doi: 10.1049/iet-rsn.2009.0132 [4] 丁昊, 董云龙, 刘宁波, 等. 海杂波特性认知研究进展与展望[J]. 雷达学报, 2016, 5(5): 499–516. doi: 10.12000/JR16069DING Hao, DONG Yunlong, LIU Ningbo, et al. Overview and prospects of research on sea clutter property cognition[J]. Journal of Radars, 2016, 5(5): 499–516. doi: 10.12000/JR16069 [5] 何友, 黄勇, 关键, 等. 海杂波中的雷达目标检测技术综述[J]. 现代雷达, 2014, 36(12): 1–9. doi: 10.3969/j.issn.1004-7859.2014.12.001HE You, HUANG Yong, GUAN Jian, et al. An overview on radar target detection in sea clutter[J]. Modern Radar, 2014, 36(12): 1–9. doi: 10.3969/j.issn.1004-7859.2014.12.001 [6] 丁昊, 刘宁波, 董云龙, 等. 雷达海杂波测量试验回顾与展望[J]. 雷达学报, 2019, 8(3): 281–302. doi: 10.12000/JR19006DING Hao, LIU Ningbo, DONG Yunlong, et al. Overview and prospects of radar sea clutter measurement experiments[J]. Journal of Radars, 2019, 8(3): 281–302. doi: 10.12000/JR19006 [7] DALEY J C, RANSONE J T, BURKETT J A, et al. Sea clutter measurements on four frequencies[R]. Naval Research Laboratory Report 6806, 1968. [8] TITI G W and MARSHALL D F. The ARPA/Navy mountaintop program: Adaptive signal processing for airborne early warning radar[C]. 1996 IEEE International Conference on Acoustics, Speech, and Signal Processing Conference Proceedings, Atlanta, USA, 1996: 1165–1168. doi: 10.1109/ICASSP.1996.543572. [9] DROSOPOULOS A. Description of the OHGR database[R]. Technical Note 94-14, 1994. [10] GRECO M, STINCO P, GINI F, et al. Impact of sea clutter nonstationarity on disturbance covariance matrix estimation and CFAR detector performance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1502–1513. doi: 10.1109/TAES.2010.5545205 [11] HERSELMAN P L, BAKER C J, and DE WIND H J. An analysis of X-band calibrated sea clutter and small boat reflectivity at medium-to-low grazing angles[J]. International Journal of Navigation and Observation, 2008, 2008: 347518. doi: 10.1155/2008/347518 [12] HERSELMAN P L and BAKER C J. Analysis of calibrated sea clutter and boat reflectivity data at C- and X-band in South African coastal waters[C]. 2007 IET International Conference on Radar Systems, Edinburgh, UK, 2007. doi: 10.1049/cp:20070616. [13] CARRETERO-MOYA J, GISMERO-MENOYO J, BLANCO-DEL-CAMPO Á, et al. Statistical analysis of a high-resolution sea-clutter database[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(4): 2024–2037. doi: 10.1109/TGRS.2009.2033193 [14] ANTIPOV I. Analysis of sea clutter data[R]. Technical Report DSTO-TR-0647, 1998. [15] DONG Yunhan and MERRETT D. Statistical measures of S-band sea clutter and targets[R]. Technical Report DSTO-TR-2221, 2008. [16] DONG Yunhan and MERRETT D. Analysis of L-band multi-channel sea clutter[R]. Technical Report DSTO-TR-2455, 2010. [17] 赵海云, 张瑞永, 武楠, 等. 基于实测数据的海杂波特性分析[J]. 雷达科学与技术, 2009, 7(3): 214–218. doi: 10.3969/j.issn.1672-2337.2009.03.011ZHAO Haiyun, ZHANG Ruiyong, WU Nan, et al. Analysis of sea clutter characteristics based on measured data[J]. Radar Science and Technology, 2009, 7(3): 214–218. doi: 10.3969/j.issn.1672-2337.2009.03.011 [18] 刘志高, 徐向东, 刘斌. 某低空警戒雷达海杂波数据的统计特性分析[J]. 空军雷达学院学报, 2004, 18(4): 1–3, 10. doi: 10.3969/j.issn.1673-8691.2004.04.001LIU Zhigao, XU Xiangdong, and LIU Bin. Statistical analysis of sea clutter feature data from a low-altitude surveillance radar[J]. Journal of Air Force Radar Academy, 2004, 18(4): 1–3, 10. doi: 10.3969/j.issn.1673-8691.2004.04.001 [19] 张忠, 袁业术, 孟宪德. 舰载超视距雷达背景杂波统计特性分析[J]. 系统工程与电子技术, 2002, 24(9): 19–22. doi: 10.3321/j.issn:1001-506X.2002.09.007ZHANG Zhong, YUAN Yeshu, and MENG Xiande. Background clutters statistical characteristics in shipborne radar[J]. Systems Engineering and Electronics, 2002, 24(9): 19–22. doi: 10.3321/j.issn:1001-506X.2002.09.007 [20] 周超, 刘泉华. Ku波段实验雷达海杂波实测数据分析[J]. 信号处理, 2015, 31(12): 1573–1578. doi: 10.3969/j.issn.1003-0530.2015.12.005ZHOU Chao and LIU Quanhua. Analysis of field sea clutter data of Ku band[J]. Journal of Signal Processing, 2015, 31(12): 1573–1578. doi: 10.3969/j.issn.1003-0530.2015.12.005 [21] 杨俊岭, 李大治, 万建伟, 等. 海杂波尖峰特性研究及仿真分析[J]. 系统仿真学报, 2007, 19(8): 1836–1840. doi: 10.3969/j.issn.1004-731X.2007.08.046YANG Junling, LI Dazhi, WAN Jianwei, et al. Sea spike characteristics studies and simulation analyses[J]. Journal of System Simulation, 2007, 19(8): 1836–1840. doi: 10.3969/j.issn.1004-731X.2007.08.046 [22] XU Shuwen, SHUI Penglang, and YAN Xueying. Non-coherent detection of radar target in heavy-tailed sea clutter using bi-window non-linear shrinkage map[J]. IET Signal Processing, 2016, 10(9): 1031–1039. doi: 10.1049/iet-spr.2015.0564 [23] 康士峰, 葛德彪, 罗贤云, 等. 多波段多极化海杂波特性的实验研究[J]. 微波学报, 2000, 16(5): 463–468. doi: 10.3969/j.issn.1005-6122.2000.z1.003KANG Shifeng, GE Debiao, LUO Xianyun, et al. Experimental study on multi-band and multi-polarization characteristics of sea clutter[J].Journal of Microwaves, 2000, 16(5): 463–468. doi: 10.3969/j.issn.1005-6122.2000.z1.003 [24] 张金鹏, 张玉石, 李清亮, 等. 基于不同散射机制特征的海杂波时变多普勒谱模型[J]. 物理学报, 2018, 67(3): 034101. doi: 10.7498/aps.67.20171612ZHANG Jinpeng, ZHANG Yushi, LI Qingliang, et al. A time-varying Doppler spectrum model of radar sea clutter based on different scattering mechanisms[J]. Acta Physica Sinica, 2018, 67(3): 034101. doi: 10.7498/aps.67.20171612 [25] 夏晓云, 黎鑫, 张玉石, 等. 基于相位的岸基雷达地海杂波分割方法[J]. 系统工程与电子技术, 2018, 40(3): 552–556. doi: 10.3969/j.issn.1001-506X.2018.03.10XIA Xiaoyun, LI Xin, ZHANG Yushi, et al. Sea-land clutter segmentation method of shore-based radar based on phase information[J]. Systems Engineering and Electronics, 2018, 40(3): 552–556. doi: 10.3969/j.issn.1001-506X.2018.03.10 [26] 许心瑜, 张玉石, 黎鑫, 等. UHF波段海杂波时间相关性的海浪状态影响分析[J]. 系统工程与电子技术, 2017, 39(6): 1203–1207. doi: 10.3969/j.issn.1001-506X.2017.06.03XU Xinyu, ZHANG Yushi, LI Xin, et al. Influence of sea condition on the temporal correlation properties of UHF band sea clutter[J]. Systems Engineering and Electronics, 2017, 39(6): 1203–1207. doi: 10.3969/j.issn.1001-506X.2017.06.03 [27] 张玉石, 许心瑜, 吴振森, 等. L波段小擦地角海杂波幅度均值与风速关系建模[J]. 电波科学学报, 2015, 30(2): 289–294. doi: 10.13443/j.cjors.2014042001ZHANG Yushi, XU Xinyu, WU Zhensen, et al. Modeling windspeed behavior of L-band sea clutter average reflectivity at low grazing angles[J]. Chinese Journal of Radio Science, 2015, 30(2): 289–294. doi: 10.13443/j.cjors.2014042001 [28] 张玉石, 尹雅磊, 许心瑜, 等. 海杂波测量定标的姿态修正数据处理方法[J]. 电子与信息学报, 2015, 37(3): 607–612. doi: 10.11999/JEIT140659ZHANG Yushi, YIN Yalei, XU Xinyu, et al. Data processing method of posture correction for calibration of sea clutter measurement[J]. Journal of Electronics&Information Technology, 2015, 37(3): 607–612. doi: 10.11999/JEIT140659 [29] 许心瑜, 张玉石, 黎鑫, 等. L波段小擦地角海杂波KK分布建模[J]. 系统工程与电子技术, 2014, 36(7): 1304–1308. doi: 10.3969/j.issn.1001-506X.2014.07.13XU Xinyu, ZHANG Yushi, LI Xin, et al. KK distribution modeling with L band low grazing sea clutter[J]. Systems Engineering and Electronics, 2014, 36(7): 1304–1308. doi: 10.3969/j.issn.1001-506X.2014.07.13 [30] 张玉石, 许心瑜, 尹雅磊, 等. L波段小擦地角海杂波幅度统计特性研究[J]. 电子与信息学报, 2014, 36(5): 1044–1048. doi: 10.3724/SP.J.1146.2013.01139ZHANG Yushi, XU Xinyu, YIN Yalei, et al. Research on amplitude statistics of L-band low grazing angle sea clutter[J]. Journal of Electronics&Information Technology, 2014, 36(5): 1044–1048. doi: 10.3724/SP.J.1146.2013.01139 [31] DING Hao, GUAN Jian, LIU Ningbo, et al. New spatial correlation models for sea clutter[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(9): 1833–1837. doi: 10.1109/LGRS.2015.2430371 [32] DING Hao, GUAN Jian, LIU Ningbo, et al. Modeling of heavy tailed sea clutter based on the generalized central limit theory[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(11): 1591–1595. doi: 10.1109/LGRS.2016.2596322 [33] GUAN J, LIU N B, HUANG Y, et al. Fractal characteristic in frequency domain for target detection within sea clutter[J]. IET Radar,Sonar&Navigation, 2012, 6(5): 293–306. doi: 10.1049/iet-rsn.2011.0250 [34] GUAN Jian, LIU Ningbo, HUANG Yong, et al. Fractal Poisson model for target detection within spiky sea clutter[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(2): 411–415. doi: 10.1109/lgrs.2012.2203578 [35] CHEN Xiaolong, GUAN Jian, HE You, et al. Detection of low observable moving target in sea clutter via fractal characteristics in fractional Fourier transform domain[J]. IET Radar,Sonar&Navigation, 2013, 7(6): 635–651. doi: 10.1049/iet-rsn.2012.0116 [36] CHEN Xiaolong, GUAN Jian, BAO Zhonghua, et al. Detection and extraction of target with micromotion in spiky sea clutter via short-time fractional Fourier transform[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1002–1018. doi: 10.1109/TGRS.2013.2246574 [37] CHEN Xiaolong, GUAN Jian, LIU Ningbo, et al. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration[J]. IEEE Transactions on Signal Processing, 2014, 62(4): 939–953. doi: 10.1109/TSP.2013.2297682 [38] CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radon-linear canonical ambiguity function-based detection and estimation method for marine target with micromotion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(4): 2225–2240. doi: 10.1109/TGRS.2014.2358456 [39] CHEN Xiaolong, HUANG Yong, LIU Ningbo, et al. Radon-fractional ambiguity function-based detection method of low-observable maneuvering target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 815–833. doi: 10.1109/taes.2014.130791 [40] 黄勇, 陈小龙, 关键. 实测海尖峰特性分析及抑制方法[J]. 雷达学报, 2015, 4(3): 334–342. doi: 10.12000/JR14108HUANG Yong, CHEN Xiaolong, and GUAN Jian. Property analysis and suppression method of real measured sea spikes[J]. Journal of Radars, 2015, 4(3): 334–342. doi: 10.12000/JR14108 [41] 苏宁远, 陈小龙, 关键, 等. 基于卷积神经网络的海上微动目标检测与分类方法[J]. 雷达学报, 2018, 7(5): 565–574. doi: 10.12000/JR18077SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565–574. doi: 10.12000/JR18077 [42] 总装电子信息基础部. GJB 5026-2003固定站地、海杂波测试方法[S]. 北京: 中国人民解放军总装备部, 2003.General Assembly Electronic Information Foundation Department. GJB 5026-2003 Measurement method of ground/sea clutter with stationary platform[S]. Beijing: General Armaments Department of PLA, 2003. [43] GJB 6638-2008雷达杂波统计方法[S]. 北京: 中国人民解放军总装备部, 2008.GJB 6638-2008 Statistical methods of radar clutter[S]. Beijing: General Equipment Department of the Chinese People’s Liberation Army, 2008. [44] GJB 6850.138-2009水面舰船系泊和航行试验规程第138部分: 导航雷达试验[S]. 北京: 中国人民解放军总装备部, 2009.GJB 6850.138-2009 Code for mooring and sea trial of surface naval ships - Part 138: Test for ships aerograph[S]. Beijing: General Equipment Department of the Chinese People’s Liberation Army, 2009. [45] GJB 5027-2003室外场雷达目标散射特性测试方法[S]. 北京: 中国人民解放军总装备部, 2003.GJB 5027-2003 The method of measurement for radar target scattering of outdoor range[S]. Beijing: General Equipment Department of the Chinese People’s Liberation Army, 2003. [46] 李清亮, 尹志盈, 朱秀芹, 等. 雷达地海杂波测量与建模[M]. 北京: 国防工业出版社, 2017: 56-105.LI Qingliang, YIN Zhiying, ZHU Xiuqin, et al. Measurement and Modeling of Radar Clutter from Land and Sea[M]. Beijing: National Defend Industry Press, 2017: 56–105. -



















计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

