
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要:
星载合成孔径雷达(SAR)是一种2维高分辨率微波成像雷达。它通过发射大带宽信号实现距离向高分辨,通过合成孔径技术实现方位向高分辨。随着人们对分辨率需求的不断提升,星载SAR正朝着分米级分辨率发展。一方面,受限于现有器件水平,可以通过频率步进技术实现大带宽信号发射,需要研究高精度子带拼接技术、子带间幅相误差对成像的影响与补偿技术;另一方面,受限于有限的波束宽度,可以使系统工作在聚束模式或滑聚模式实现长合成孔径,此时需研究轨道弯曲、“Stop-go”假设误差、电离层与对流层传输误差等非理想因素对成像的影响与补偿技术。因此,该文详细介绍了频率步进信号时序设计与子带拼接,研究星载高分辨率频率步进SAR成像算法与非理想因素补偿方法,最后给出成像算法的仿真验证和性能分析。
Abstract:Spaceborne Synthetic Aperture Radar (SAR) is a type of microwave imaging radar with 2D high resolution. This technological device achieves range high resolution by transmitting wideband signals and azimuth high resolution through the synthetic aperture approach. With the increasing demand for high-resolution imaging, the resolution of spaceborne SAR has moved toward the decimeter level. On the one hand, limited by the present hardware technology, achieving wideband signal transmission through stepped-frequency technology is necessary. In this case, we need to study high-precision bandwidth synthesis technology. The influence of slant range error and amplitude and phase error between sub-bands should be considered. On the other hand, due to limited beamwidth, the system needs to work in sliding spot mode to achieve a long synthetic aperture. In this case, we need to study the problem of imaging parameter variance caused by curved orbit, “Stop–go” error, and the influence of ionospheric and tropospheric transmission errors on imaging. To solve these problems, this paper introduces the principle of stepped-frequency signal design and bandwidth synthesis technology in detail. A time-domain algorithm and non-ideal factor compensation method are proposed for spaceborne high-resolution stepped-frequency SAR imaging. Finally, simulation verification and performance analysis of the imaging algorithm are conducted.
-
Key words:
- Stepped frequency /
- High-resolution imaging /
- Sliding-spotlight
-
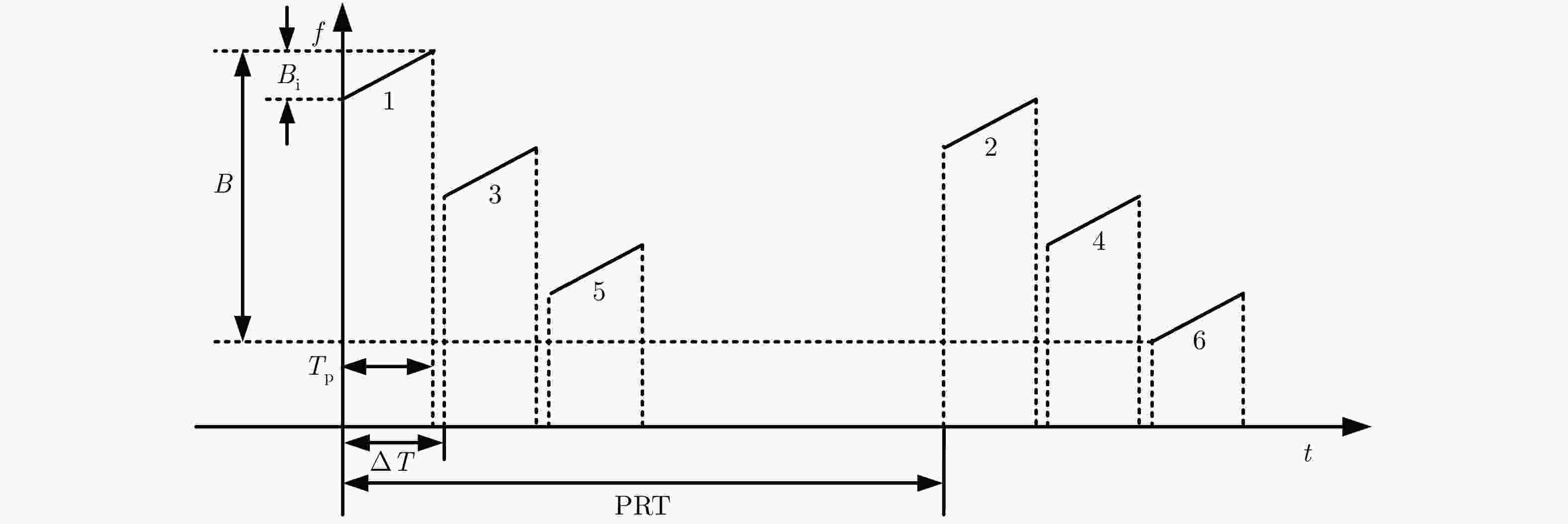
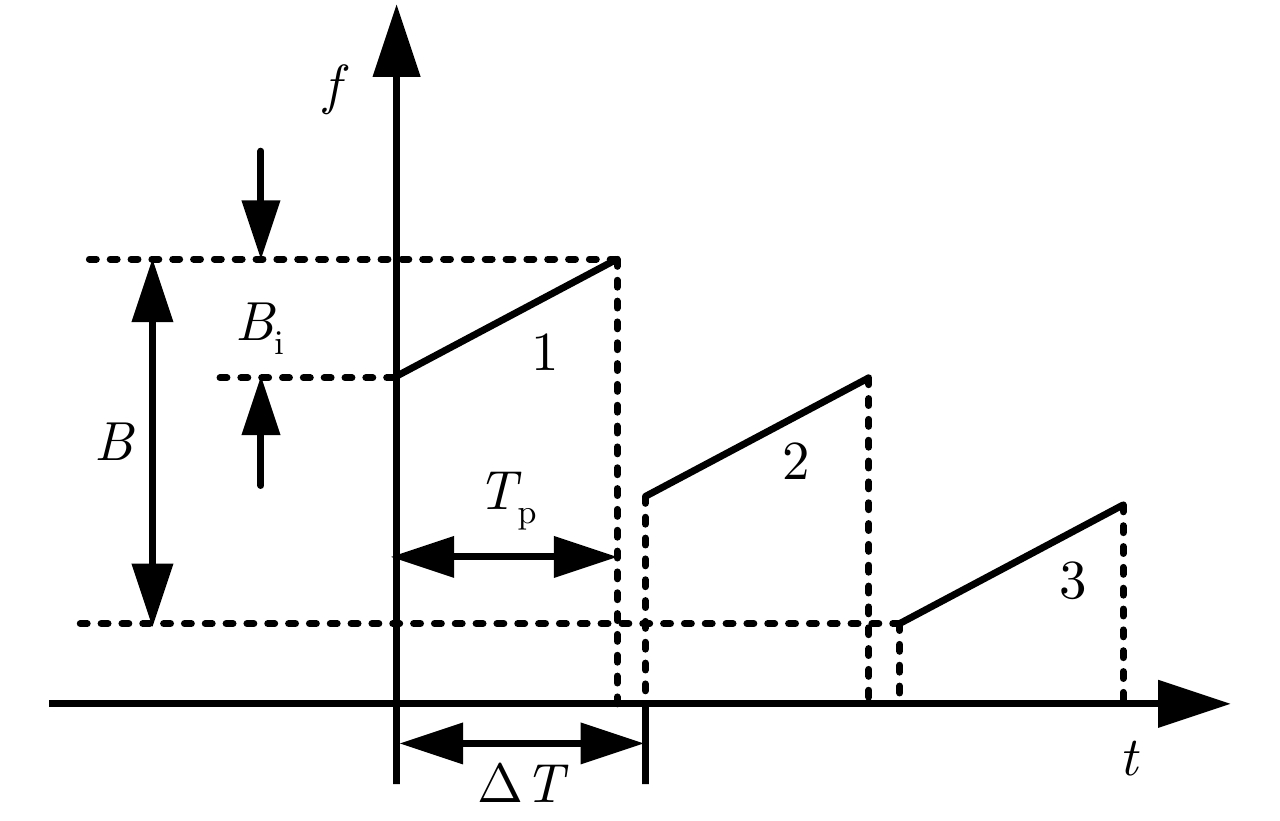
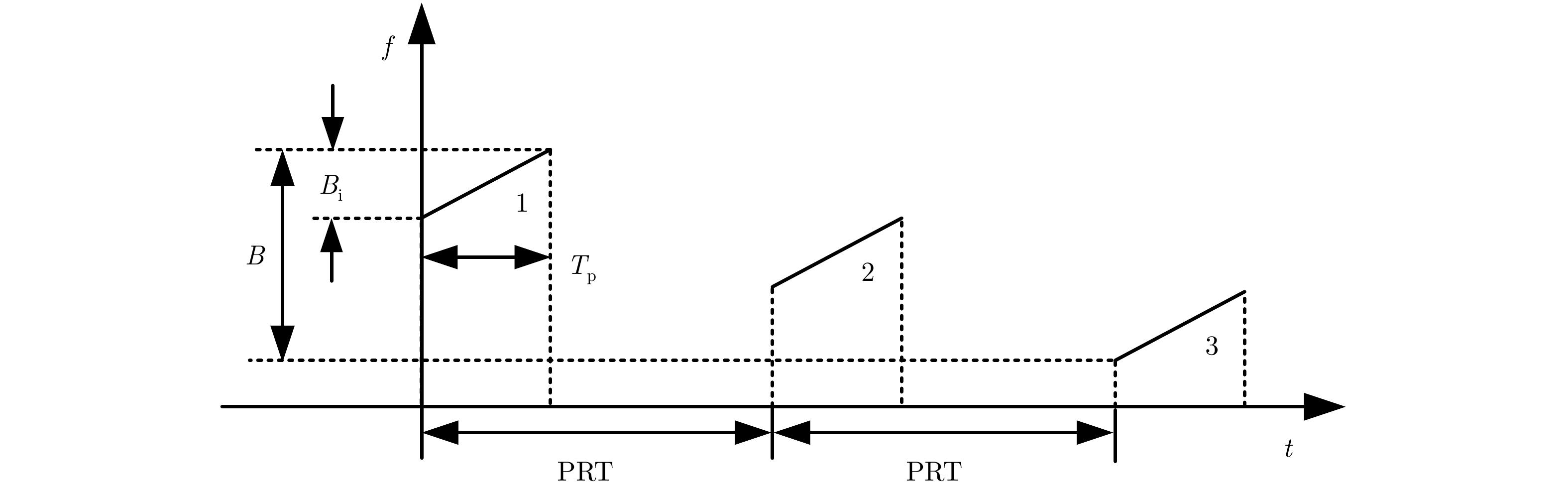
图 4 高分辨率星载SAR子带交替串发设计结果
Figure 4. Design result of subpulses transmitted alternatively for high resolution spaceborne SAR
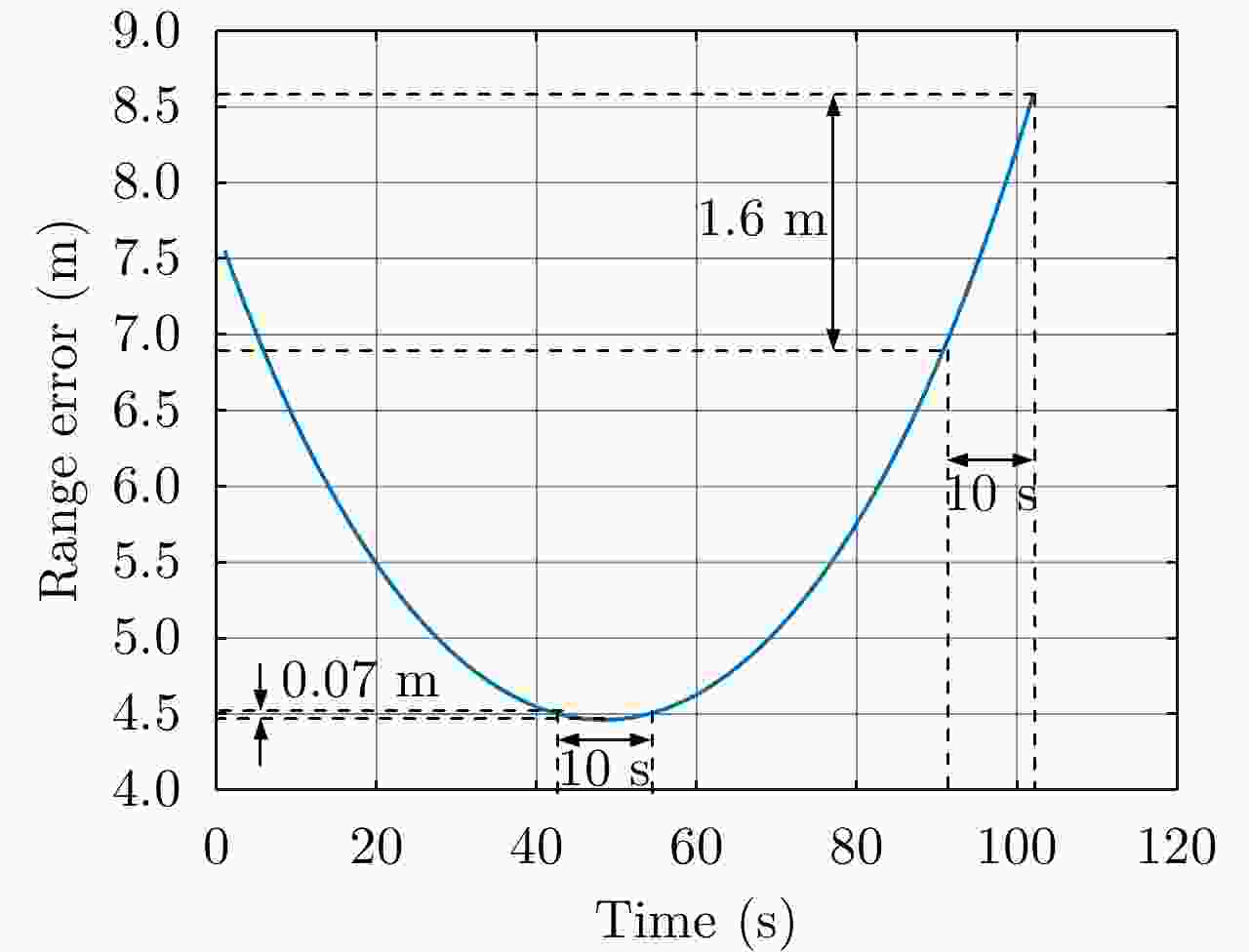
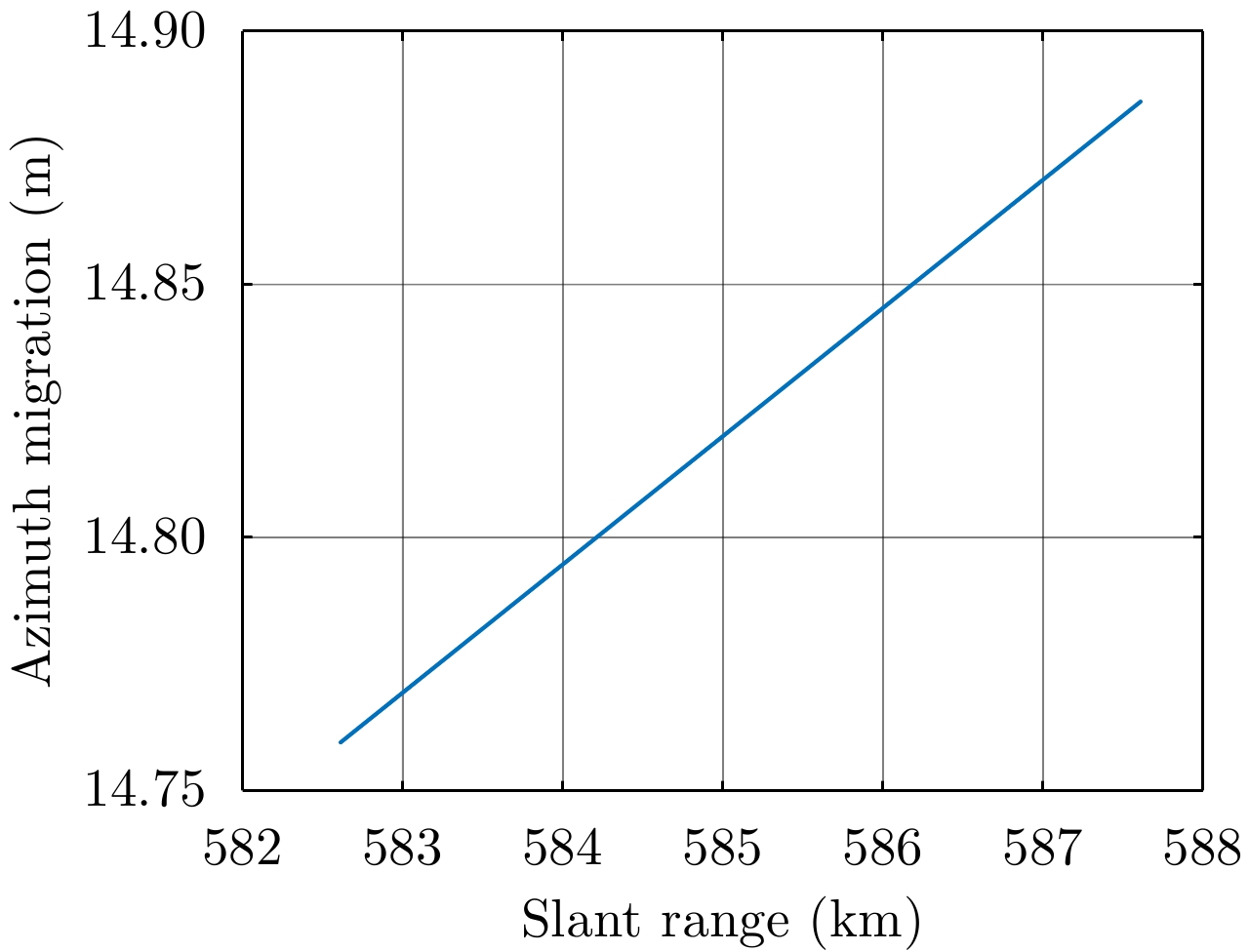
图 7 星载高分辨率SAR 100 s工作期间典型折射率下斜距误差的变化图
Figure 7. Range error variance of spaceborne high resolution SAR in typical refractive index during 100 s operation
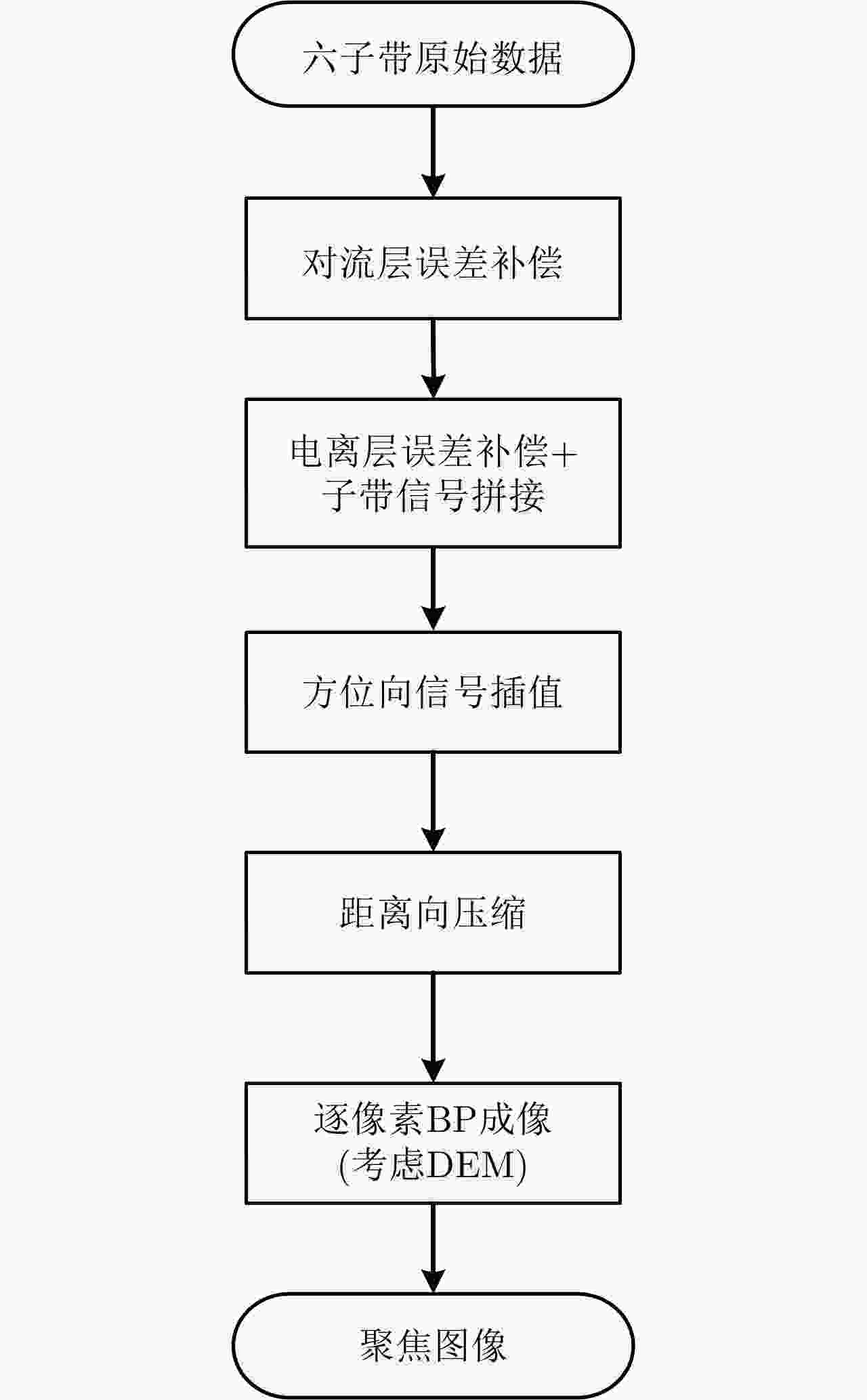
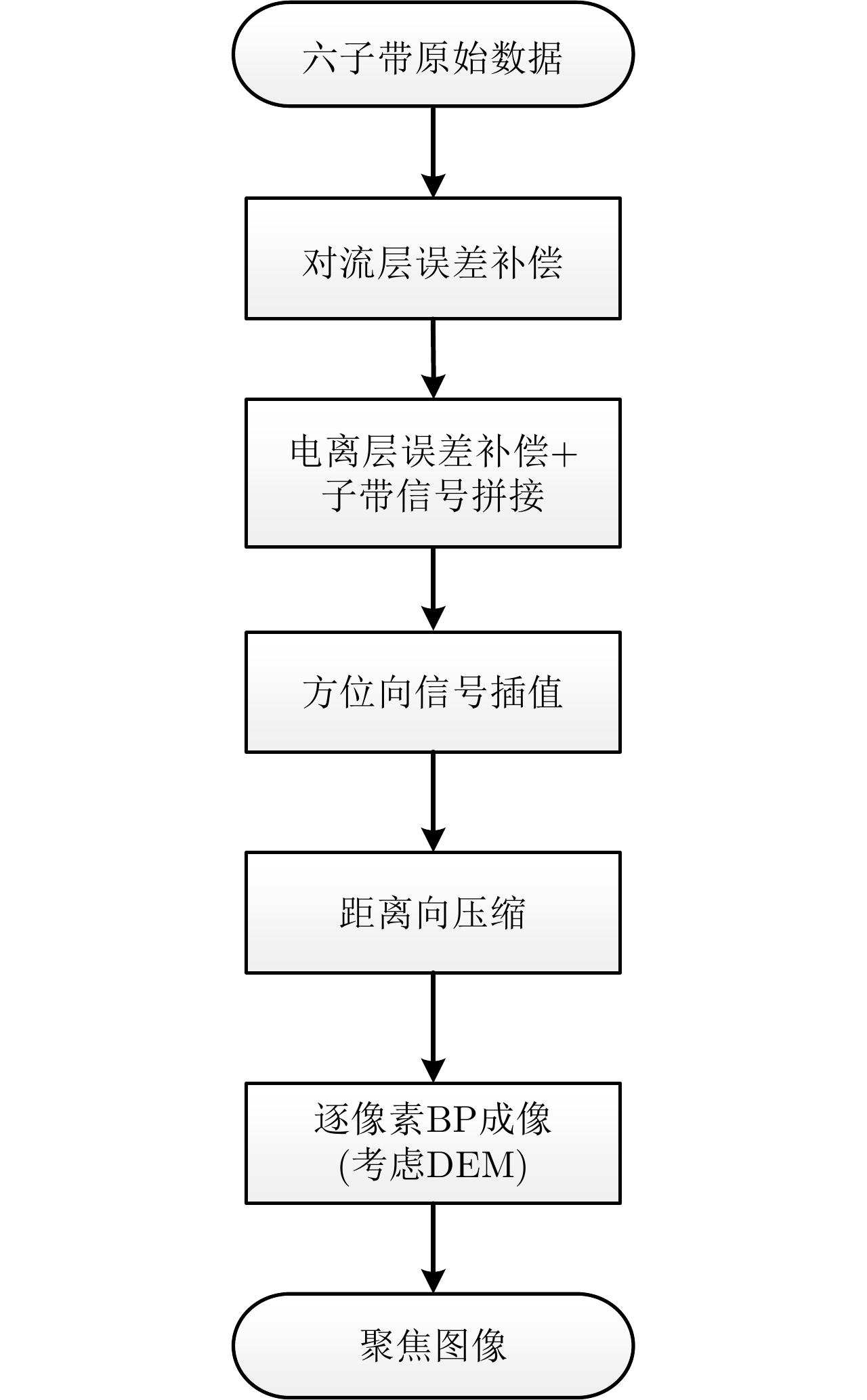
图 9 高分辨率滑动聚束星载SAR成像算法总流程
Figure 9. Flow chart of high resolution sliding spotlight spaceborne SAR imaging algorithm
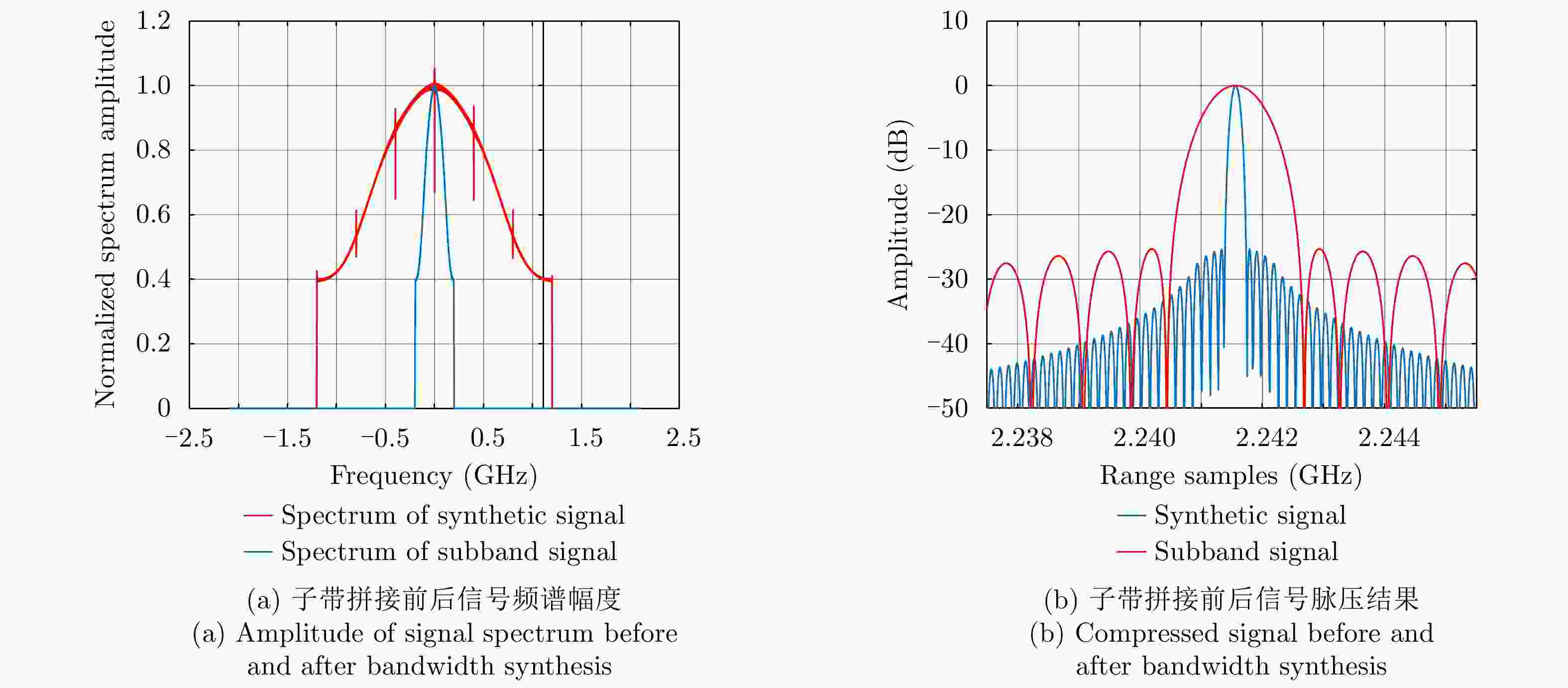
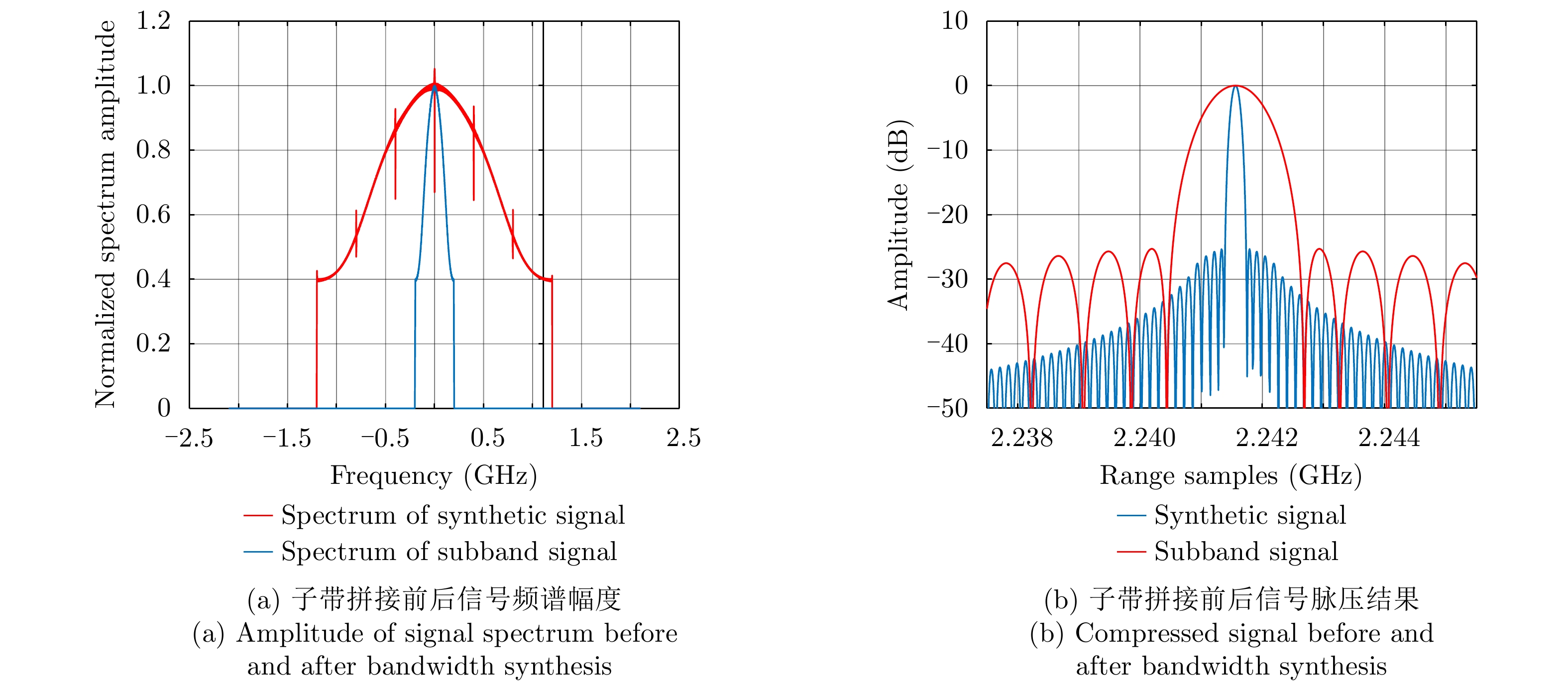
图 10 信号子带拼接前后对比
Figure 10. Stepped frequency subband signal and simulation result of synthetic bandwidth
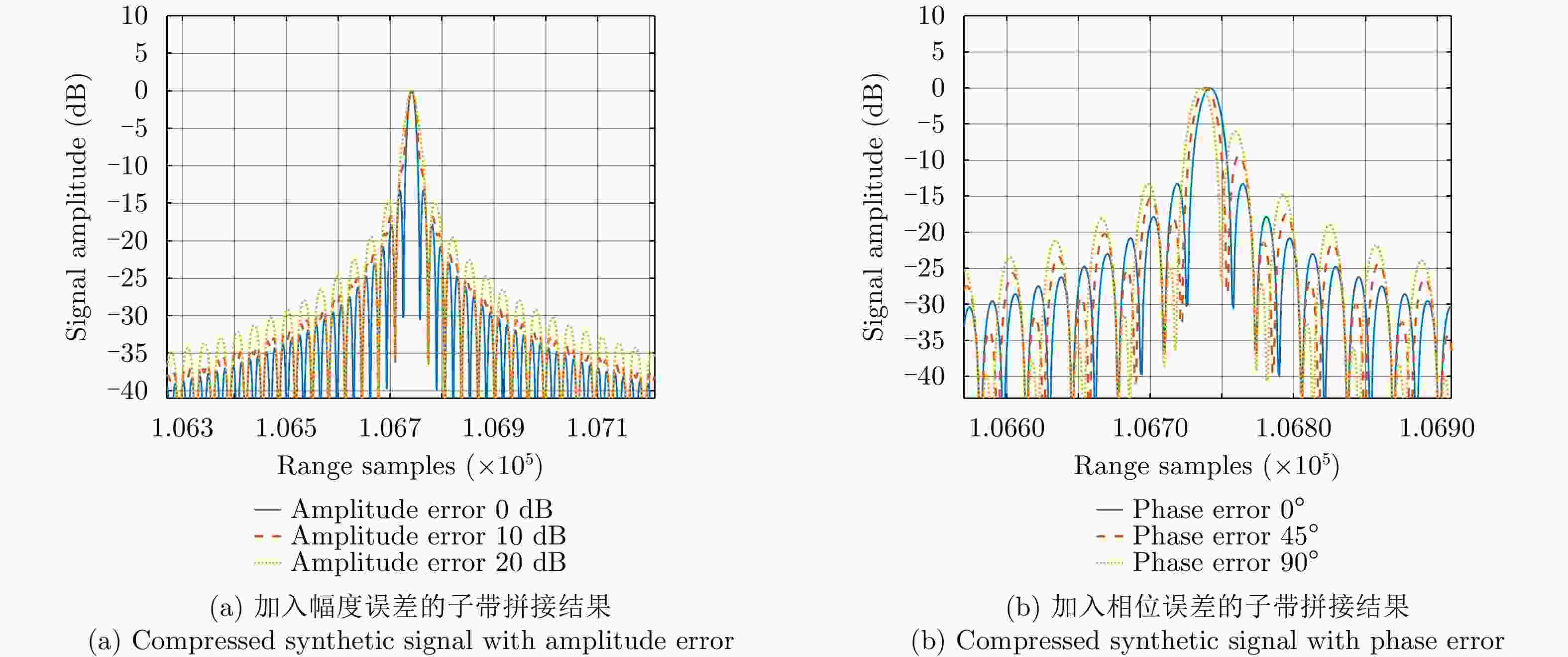
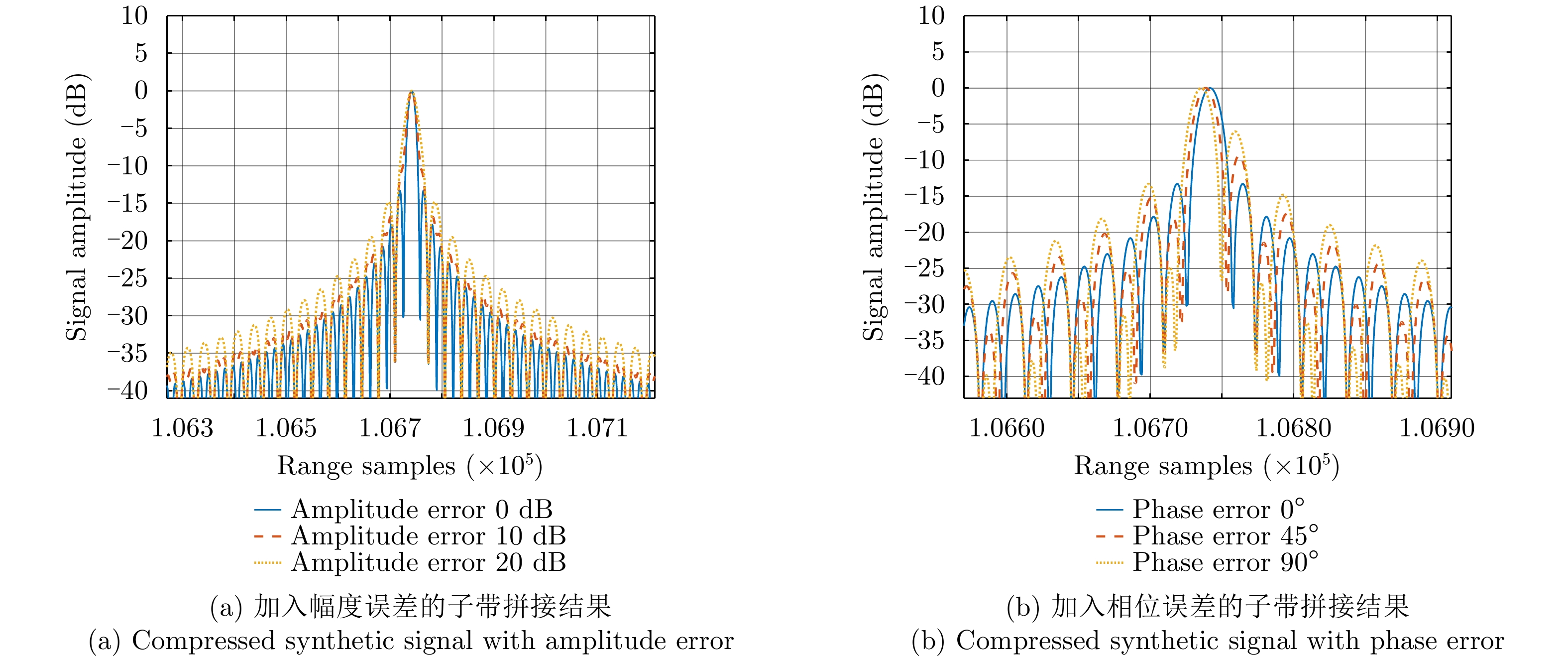
图 11 加入幅相误差的子带拼接结果
Figure 11. Compressed synthetic signal with amplitude errors and phase errors
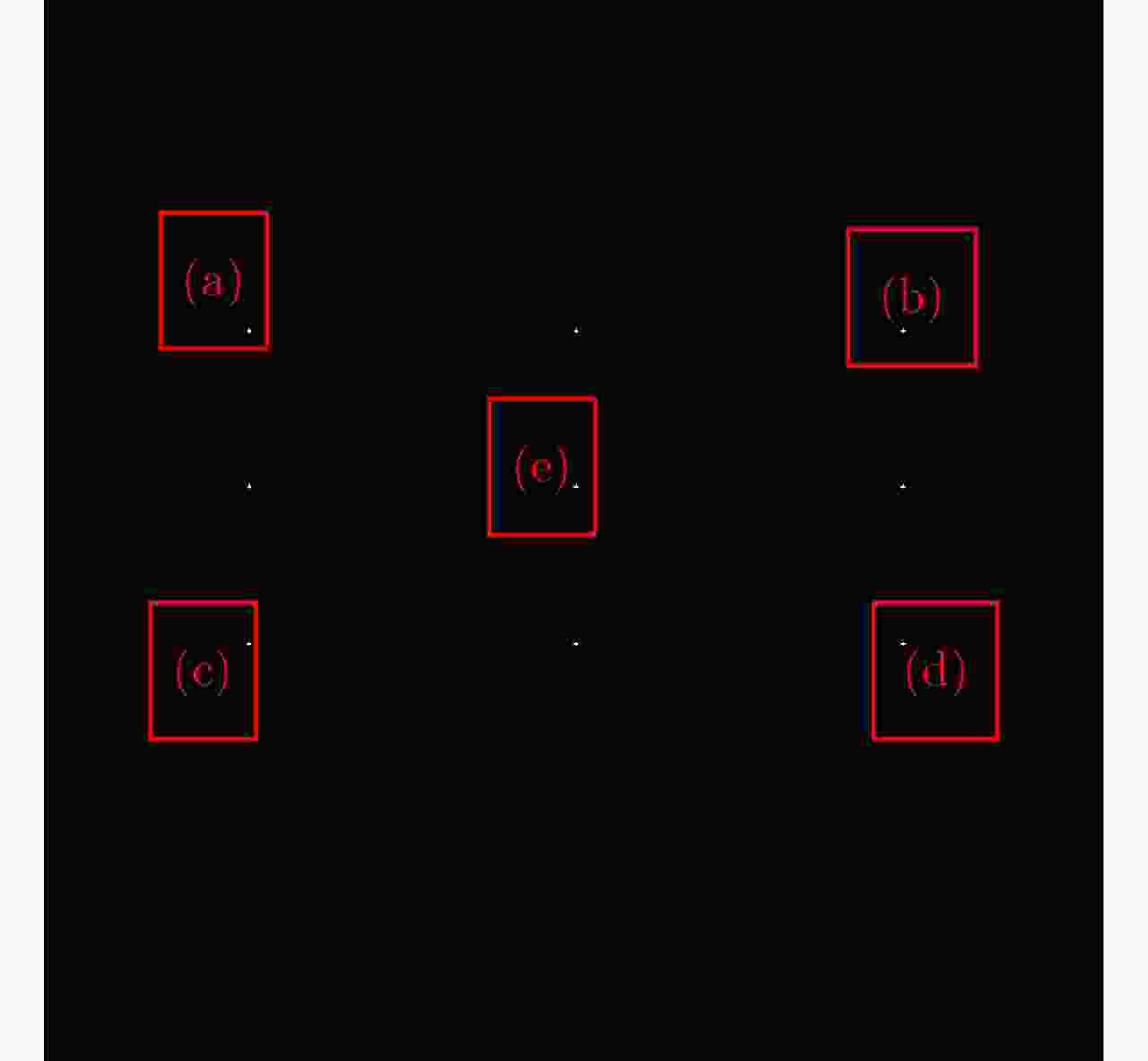
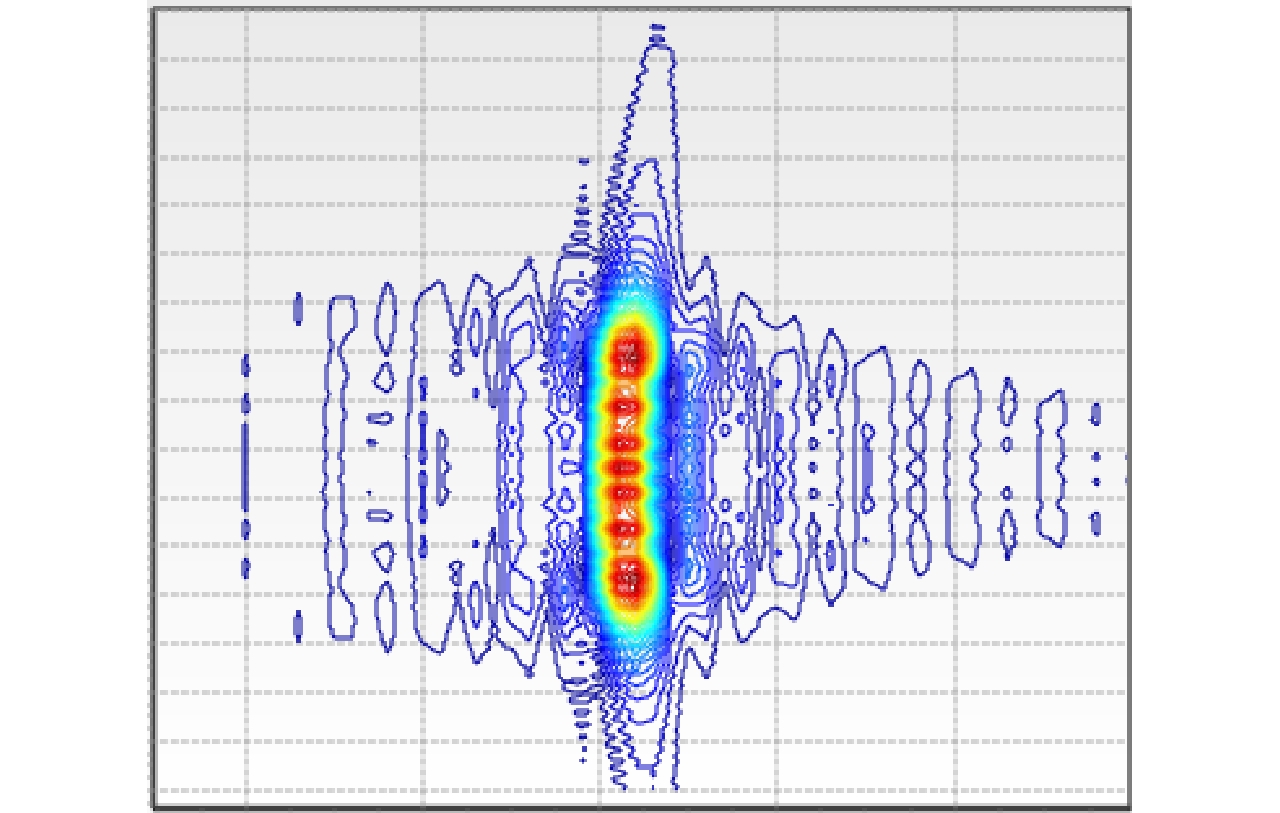
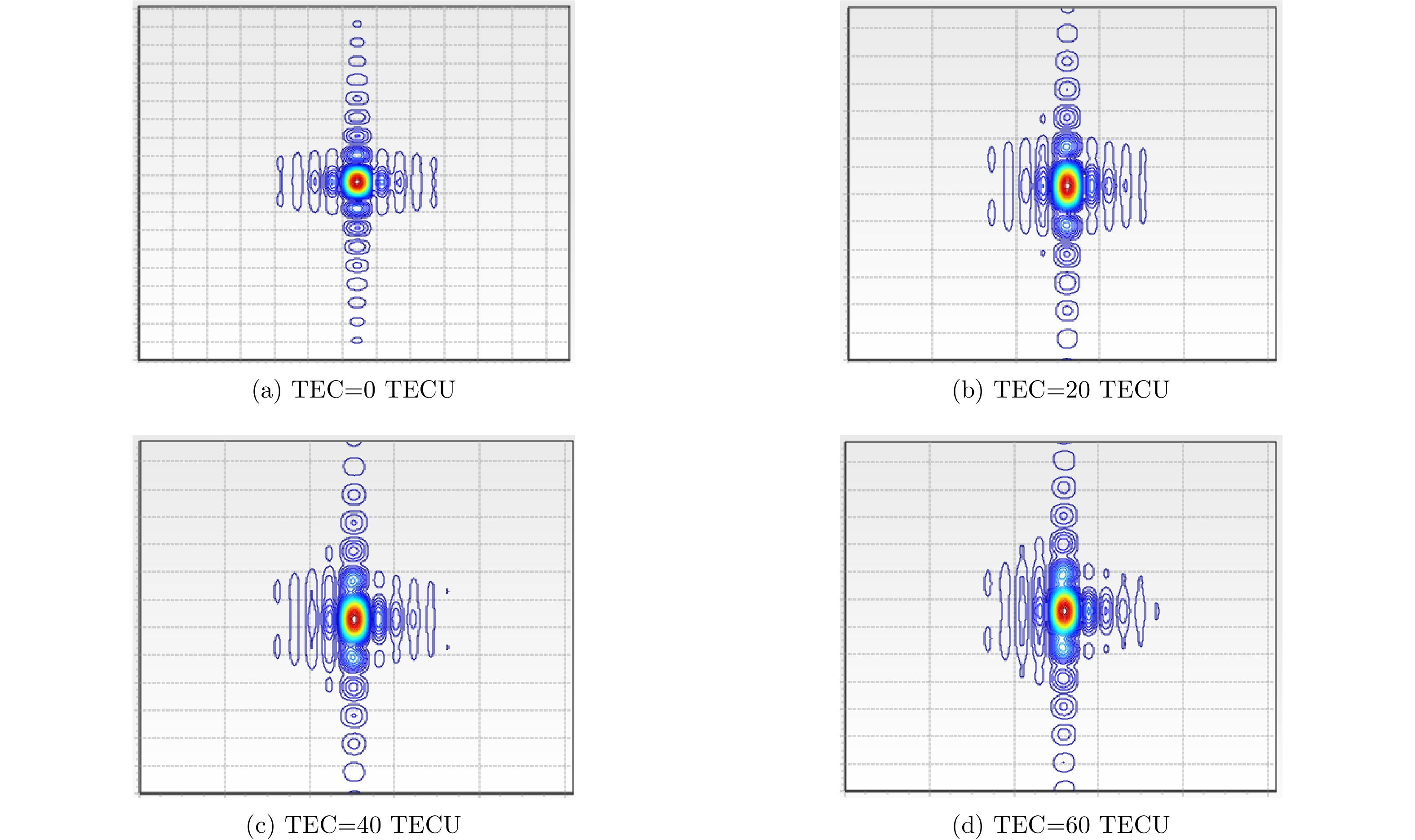
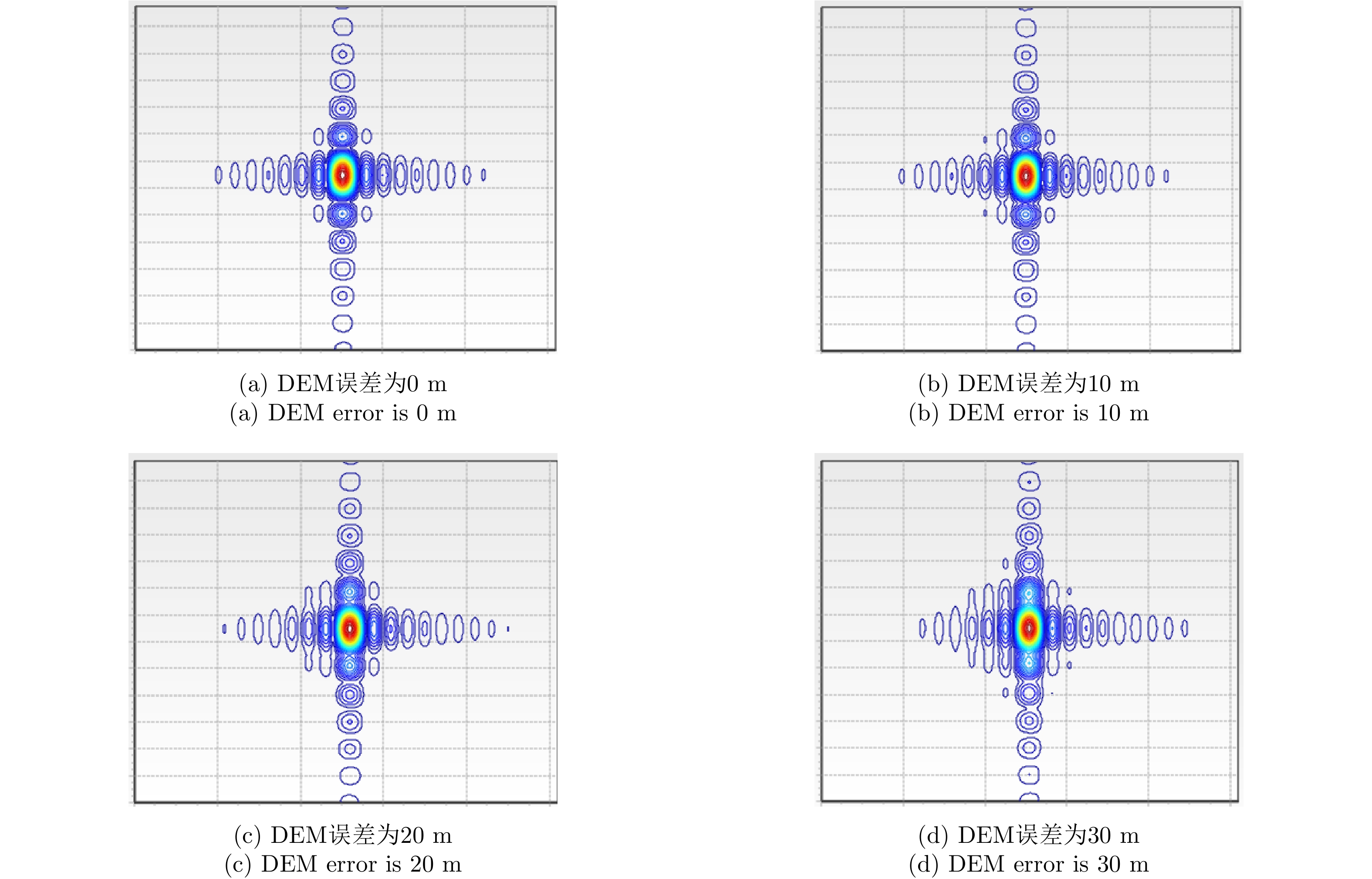
图 15 高分辨率滑动聚束星载SAR点阵目标成像结果图
Figure 15. Imaging result of dot targets with high resolution sliding spotlight spaceborne SAR
表 1 高分辨率宽测绘带滑动聚束典型参数
Table 1. Typical parameters for sliding spotlight SAR with high resolution and wide swath
参数 数值 距离向发射带宽 2.4 G,单个脉冲400 M PRF 3000~4000 Hz,分段变重频 采样延迟 分段变采样延迟 聚束因子 1/40  下载: 导出CSV
下载: 导出CSV
表 2 典型大气参数
Table 2. Typical atmosphere parameters
参数 数值 场景大气压 1.014 MPa 相对湿度 20% 场景气温 10°C 场景海拔 100 m
下载: 导出CSV
表 3 高分辨滑动聚束成像评估结果
Table 3. Evaluation results of high resolution sliding spotlight imaging
点目标 距离向 方位向 距离向分辨率 (m) 方位向分辨率 (m) PSLR (dB) ISLR (dB) PSLR (dB) ISLR (dB) a –25.72 –19.46 –23.13 –18.22 0.15 0.16 b –25.42 –19.46 –22.97 –19.01 0.15 0.16 c –25.70 –19.45 –24.76 –19.59 0.15 0.16 d –25.66 –19.49 –21.77 –18.69 0.15 0.16 e –25.37 –19.23 –21.27 –18.43 0.15 0.16
下载: 导出CSV
-
[1] CUMMING I G and WONG F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Norwood: Artech House, 2005: 1–9. [2] 张澄波. 综合孔径雷达[M]. 北京: 科学出版社, 1989: 1–5.ZHANG Chengbo. Synthetic Aperture Radar[M]. Beijing: Science Press, 1989: 1–5. [3] 袁孝康. 星载合成孔径雷达导论[M]. 北京: 国防工业出版社, 2003: 1–5.YUAN Xiaokang. Introduce to the Spaceborne Synthetic Aperture Radar[M]. Beijing: National Defend Industry Press, 2003: 1–5. [4] WILEY C A. Synthetic aperture radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES-21(3): 440–443. doi: 10.1109/TAES.1985.310578 [5] TSUNODA S I, PACE F, STENCE J, et al. Lynx: A high-resolution synthetic aperture radar[C]. SPIE 3704, Radar Sensor Technology IV, Orlando, USA, 1999: 1–4. doi: 10.1117/12.354602. [6] ENDER J H G and BRENNER A R. PAMIR-a wideband phased array SAR/MTI system[J]. IEE Proceedings-Radar, Sonar and Navigation, 2003, 150(3): 165–172. doi: 10.1049/ip-rsn:20030445 [7] WERNINGHAUS R and BUCKREUSS S. The TerraSAR-X mission and system design[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(2): 606–614. doi: 10.1109/tgrs.2009.2031062 [8] 邓云凯, 陈倩, 祁海明, 等. 一种基于频域子带合成的多发多收高分辨率SAR成像算法[J]. 电子与信息学报, 2011, 33(5): 1082–1087. doi: 10.3724/SP.J.1146.2010.01067DENG Yunkai, CHEN Qian, QI Haiming, et al. A high-resolution imaging algorithm for MIMO SAR based on the sub-band synthesis in frequency domain[J]. Journal of Electronics &Information Technology, 2011, 33(5): 1082–1087. doi: 10.3724/SP.J.1146.2010.01067 [9] LORD R T and INGGS M R. High resolution SAR processing using stepped-frequencies[C]. 1997 IEEE International Geoscience and Remote Sensing Symposium, Remote Sensing - A Scientific Vision for Sustainable Development, Singapore, 1997: 490–492. doi: 10.1109/IGARSS.1997.615924. [10] WU Yuan, SUN Guangcai, YANG Chun, et al. Processing of very high resolution spaceborne sliding spotlight SAR data using velocity scaling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(3): 1505–1518. doi: 10.1109/TGRS.2015.2481923 [11] PRATS-IRAOLA P, SCHEIBER R, RODRIGUEZ-CASSOLA M, et al. On the processing of very high resolution spaceborne SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(10): 6003–6016. doi: 10.1109/TGRS.2013.2294353 [12] BELCHER D P. Theoretical limits on SAR imposed by the ionosphere[J]. IET Radar, Sonar & Navigation, 2008, 2(6): 435–448. doi: 10.1049/iet-rsn:20070188 [13] 王沛. 高分辨率星载合成孔径雷达关键技术研究与验证[D]. [博士论文], 中国科学院大学, 2018: 47–49.WANG Pei. Study on key technology and verification of spaceborne high resolution synthetic aperture radar[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2018: 47–49. [14] VILLANO M, KRIEGER G, and MOREIRA A. Staggered-SAR for high-resolution wide-swath imaging[C]. 2012 IET International Conference on Radar Systems, Glasgow, UK, 2012: 1–6. doi: 10.1049/cp.2012.1600. [15] 秦显平. 星载GPS低轨卫星定轨理论及方法研究[D]. [博士论文], 解放军信息工程大学, 2009: 1–3.QIN Xianping. Research on precision orbit determination theory and method of low earth orbiter based on GPS technique[D]. [Ph.D. dissertation], The PLA Information Engineering University, 2009: 1–3. [16] ULANDER L M H, HELLSTEN H, and STENSTROM G. Synthetic-aperture radar processing using fast factorized back-projection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 760–776. doi: 10.1109/TAES.2003.1238734 [17] DING Zegang, GUO Yansu, GAO Wenbin, et al. A range grating lobes suppression method for stepped-frequency SAR imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(12): 5677–5687. doi: 10.1109/JSTARS.2016.2593711 [18] DING Zegang, GAO Wenbin, LIU Jingyun, et al. A novel range grating lobe suppression method based on the stepped-frequency SAR image[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(3): 606–610. doi: 10.1109/LGRS.2014.2352676 -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

