
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Radar High-resolution Range Profile Target Recognition Based on Attention Mechanism and Bidirectional Gated Recurrent
-
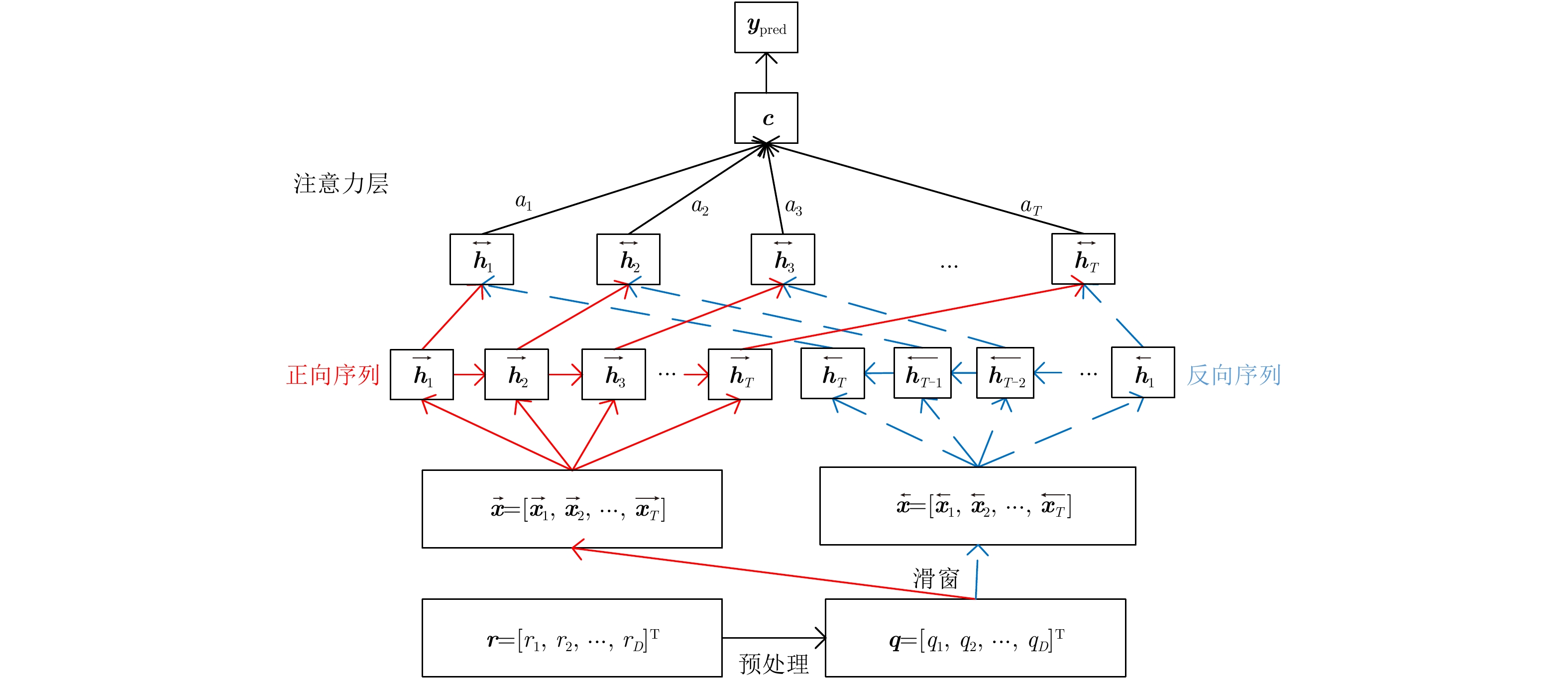
摘要: 针对雷达高分辨距离像(HRRP)目标识别问题,传统方法只考虑样本的包络信息而忽略了距离单元间的时序相关性,该文提出了一种基于注意力机制的双向自循环神经网络模型。该模型将时域的HRRP数据通过滑窗分为正反两个序列,并将其分别通过两个相互独立的GRU网络进行特征提取,然后将同时刻提取到的特征进行拼接,从而利用了距离像双向的时序信息。考虑到不同时刻的序列对目标分类的重要性不同,通过注意力机制自适应地对各时刻隐层特征赋予不同的权值,最后根据加权求和后的隐层特征进行目标的识别与分类。实测数据实验结果表明,该文所提方法可以有效完成高分辨距离像的目标识别问题,并且在数据发生一定的时序偏移情况下,仍然可以准确找到目标区域。
-
关键词:
- 雷达自动目标识别 /
- 高分辨距离像(HRRP) /
- 门控循环单元 /
- 注意力机制 /
- 平移敏感性
Abstract: To address the problem of radar High-Resolution Range Profile (HRRP) target recognition, traditional methods only consider the envelope information of the sample and ignore the temporal correlation between the range cells. In this study, we propose a bidirectional self-recurrent neural network model based on an attention mechanism. The model divides the HRRP data in the time domain into two sequences, i.e., forward and backward using a sliding window, then extracts the features through two independent GRU networks, and splices the extracted features simultaneously, thus utilizing the bidirectional temporal information of HRRP. Considering that sequences at different moments have different degrees of importance to the target classification, different attention weights are assigned to the hidden layer features at each moment. Finally, the model uses the hidden features weighted summation to obtain target recognition and classification result. Experimental results show that the proposed method can effectively solve the target recognition problem of HRRP, and that the target area can still be accurately identified when the time shift occurs. -
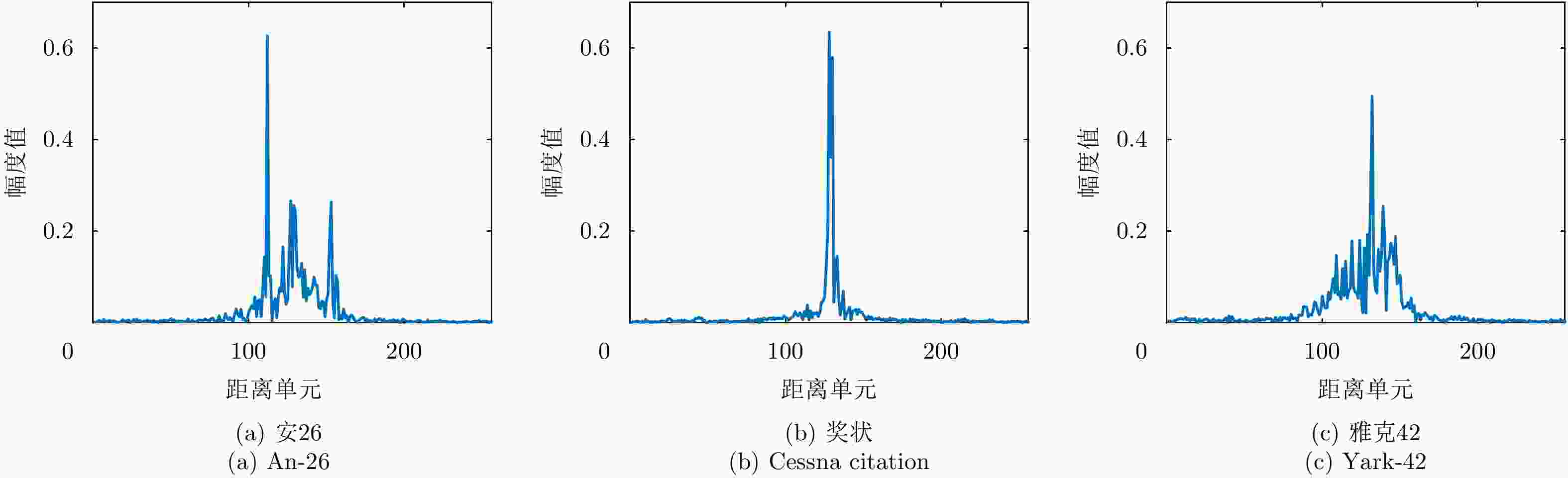
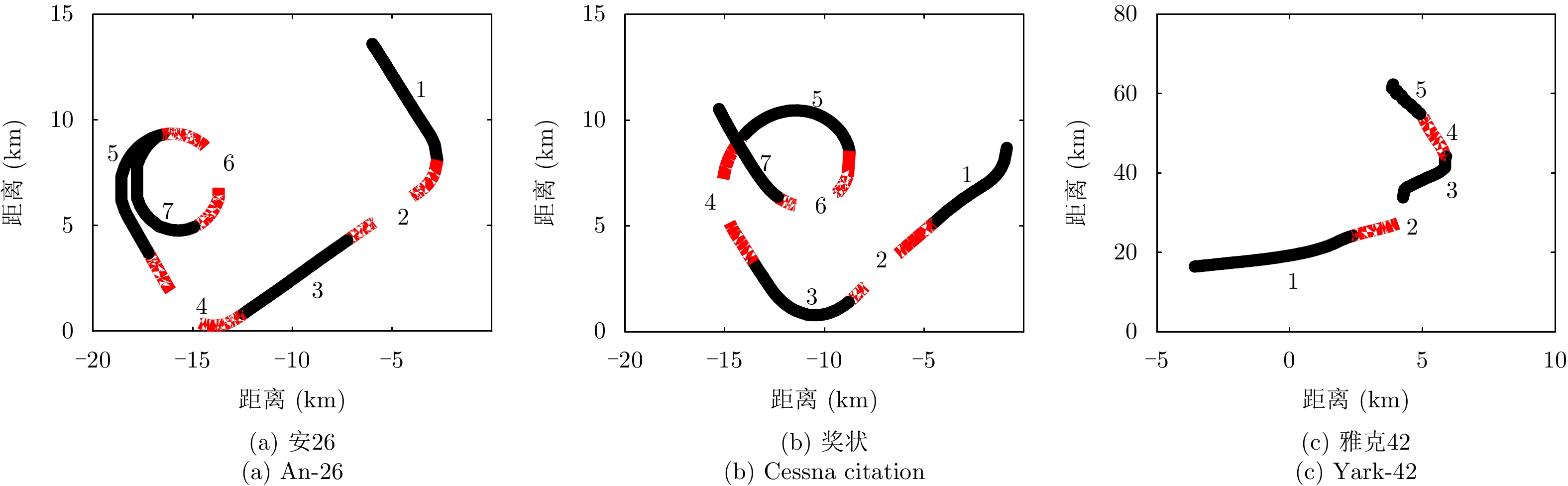
图 4 3类目标高分辨距离像的时域图
Figure 4. Measured HRRP examples of time domain for three airplanes
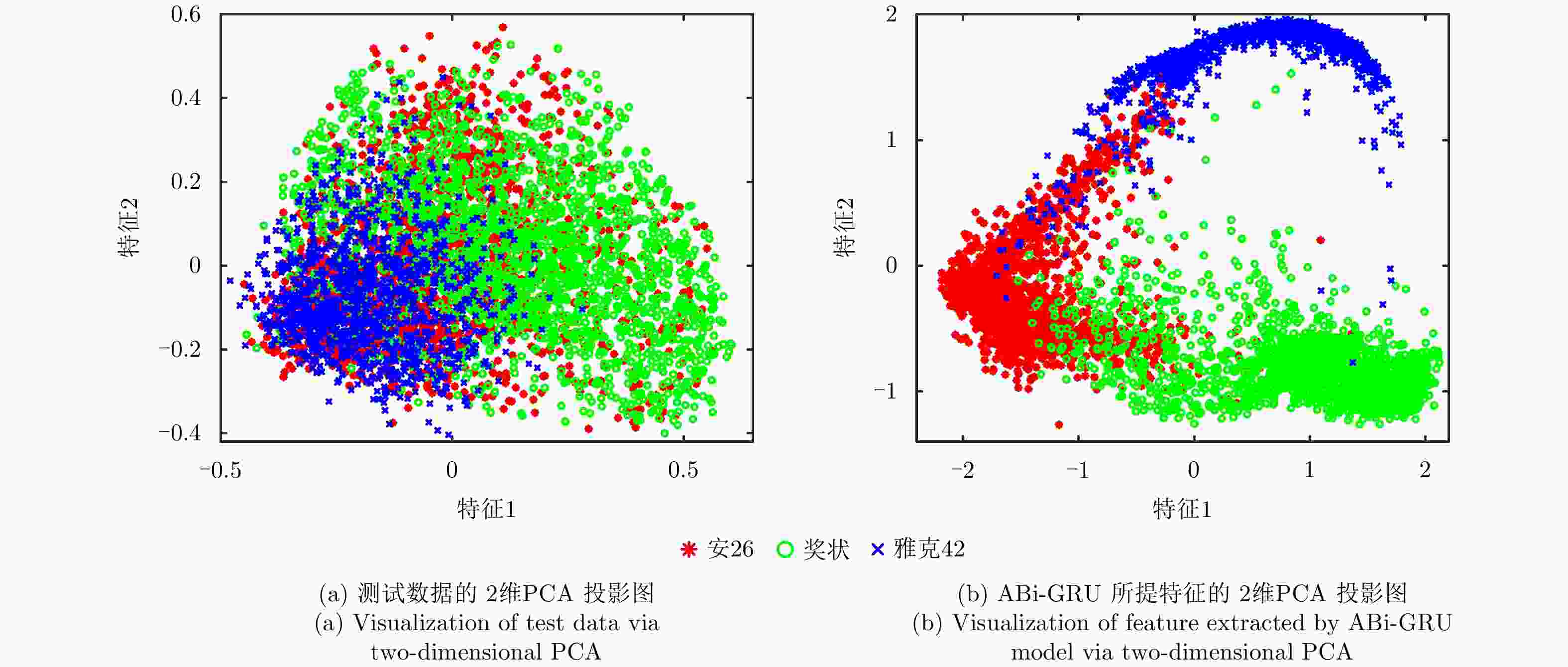
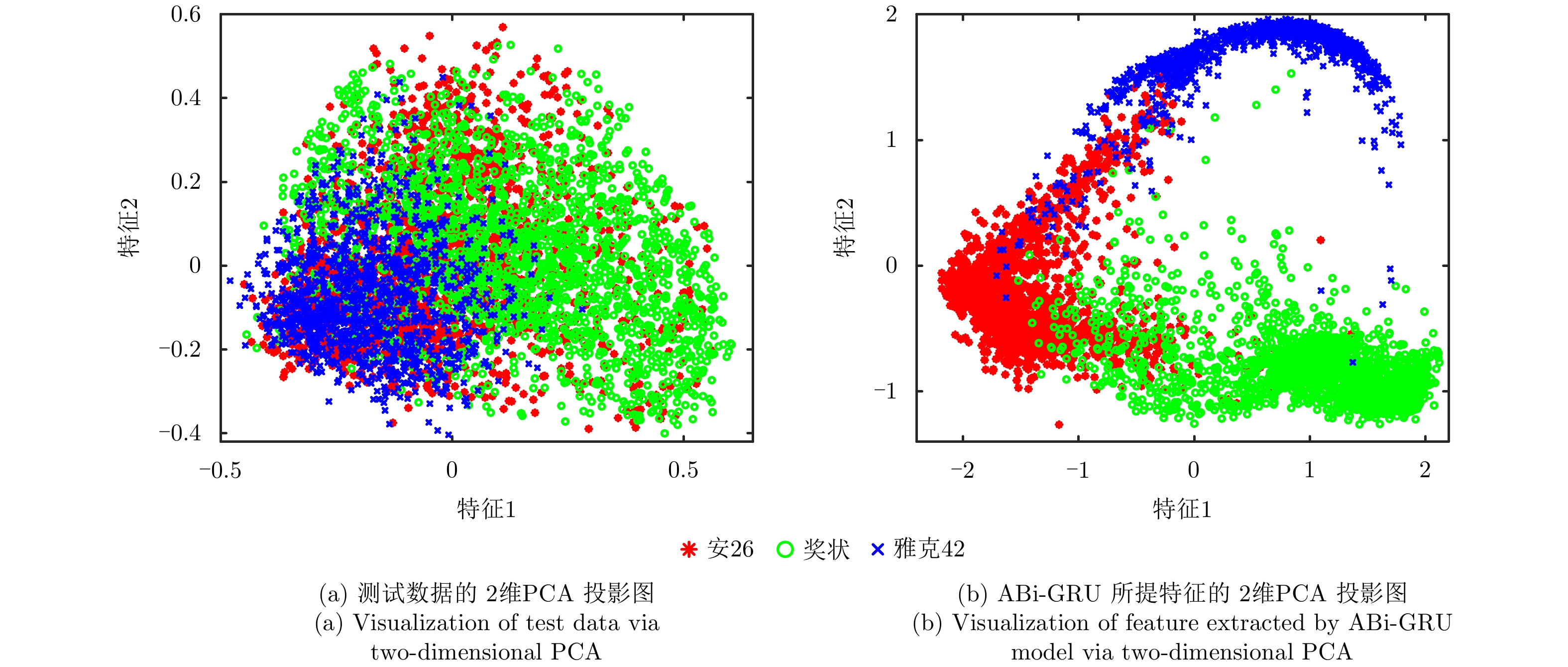
图 6 预处理后的测试数据与经ABi-GRU所提特征的2维PCA投影图
Figure 6. Visualization of test data via two-dimensional PCA
表 1 雷达和飞机相关参数
Table 1. Parameters of planes and radar
雷达参数 数值 飞机参数 安26 奖状 雅克42 中心频率 5520 MHz 机长(m) 23.80 14.40 36.38 信号带宽 400 MHz 机高(m) 8.58 4.57 9.83 机宽(m) 29.20 15.90 34.88  下载: 导出CSV
下载: 导出CSV
表 2 不同方法实验识别性能对比
Table 2. Performance comparison with different methods
方法 MCC AGC FCN HMM AGRU-for AGRU-back Bi-GRU ABi-GRU 识别性能 0.590 0.852 0.844 0.870 0.895 0.856 0.900 0.907
下载: 导出CSV
表 3 ABi-GRU模型对时域HRRP数据的混淆矩阵
Table 3. Confusion matrix of ABi-GRU model for time domain HRRP data
分类目标 分类结果 安26 奖状 雅克42 安26 0.9189 0.1270 0.0308 奖状 0.0146 0.8580 0.0042 雅克42 0.0665 0.0150 0.9650 平均识别性能 0.9140
下载: 导出CSV
-
[1] DU Lan, WANG Penghui, LIU Hongwei, et al. Bayesian spatiotemporal multitask learning for radar HRRP target recognition[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3182–3196. doi: 10.1109/TSP.2011.2141664 [2] DU Lan, LIU Hongwei, BAO Zheng, et al. Radar HRRP target recognition based on higher order spectra[J]. IEEE Transactions on Signal Processing, 2005, 53(7): 2359–2368. doi: 10.1109/TSP.2005.849161 [3] FENG Bo, DU Lan, LIU Hongwei, et al. Radar HRRP target recognition based on K-SVD algorithm[C]. Proceedings of 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011, 1: 642–645. doi: 10.1109/CIE-Radar.2011.6159622. [4] 李彬, 李辉. 基于混合概率主成分分析的HRRP特征提取[J]. 系统工程与电子技术, 2017, 39(1): 1–7. doi: 10.3969/j.issn.1001-506X.2017.01.01LI Bin and LI Hui. HRRP feature extraction based on mixtures of probabilistic principal component analysis[J]. Systems Engineering and Electronics, 2017, 39(1): 1–7. doi: 10.3969/j.issn.1001-506X.2017.01.01 [5] 唐绩, 朱峰, 路彬彬, 等. 一种基于混合Gamma分布的自动目标识别混合EM算法[J]. 现代雷达, 2017, 39(4): 45–49.TANG Ji, ZHU Feng, LU Binbin, et al. A mixed EM algorithm of automatic target recognition based on mixed Gamma distribution[J]. Modern Radar, 2017, 39(4): 45–49. [6] DU Lan, LIU Hongwei, and BAO Zheng. Radar automatic target recognition based on complex high-resolution range profiles[C]. Proceedings of 2006 CIE International Conference on Radar, Shanghai, China, 2006: 1–5. doi: 10.1109/ICR.2006.343562. [7] PAN Mian, DU Lan, WANG Penghui, et al. Multi-task hidden Markov modeling of spectrogram feature from radar high-resolution range profiles[J]. EURASIP Journal on Advances in Signal Processing, 2012, 2012: 86. doi: 10.1186/1687-6180-2012-86 [8] JI Shihao, LIAO Xuejun, and CARIN L. Adaptive multiaspect target classification and detection with hidden Markov models[J]. IEEE Sensors Journal, 2005, 5(5): 1035–1042. doi: 10.1109/JSEN.2005.847936 [9] SU Yuting, LU Yao, CHEN Mei, et al. Spatiotemporal joint mitosis detection using CNN-LSTM network in time-lapse phase contrast microscopy images[J]. IEEE Access, 2017, 5: 18033–18041. doi: 10.1109/ACCESS.2017.2745544 [10] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[EB/OL]. https://arxiv.org/abs/1406.1078, 2014. [11] PASCANU R, MIKOLOV T, and BENGIO Y. On the difficulty of training recurrent neural networks[C]. Proceedings of International Conference on Machine Learning, Atlanta, USA, 2013: 1310–1318. [12] CHUNG J, GULCEHRE C, CHO K H, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[EB/OL]. https://arxiv.org/abs/1412.3555, 2014. [13] WANG Yequan, HUANG Minlie, ZHAO Li, et al. Attention-based LSTM for aspect-level sentiment classification[C]. Proceedings of the 2016 Conference on Empirical Methods in Natural Language Processing, Austin, USA, 2016: 606–615. [14] SU Baolan and LU Shijian. Accurate scene text recognition based on recurrent neural network[C]. Proceedings of 12th Asian Conference on Computer Vision, Singapore, 2014: 35–48. doi: 10.1007/978-3-319-16865-4_3. [15] ZHOU P, SHI W, TIAN J, et al. Attention-based bidirectional long short-term memory networks for relation classification[C]. Proceedings of the 54th Annual Meeting of the Association for Computational Linguistics, Berlin, Germany, 2016, 2: 207–212. [16] FENG Bo, CHEN Bo, and LIU Hongwei. Radar HRRP target recognition with deep networks[J]. Pattern Recognition, 2017, 61: 379–393. doi: 10.1016/j.patcog.2016.08.012 -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

