
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Influence of Target Polarization Scattering Characteristics on the Detection Performance of Polarization Diversity Radar
-
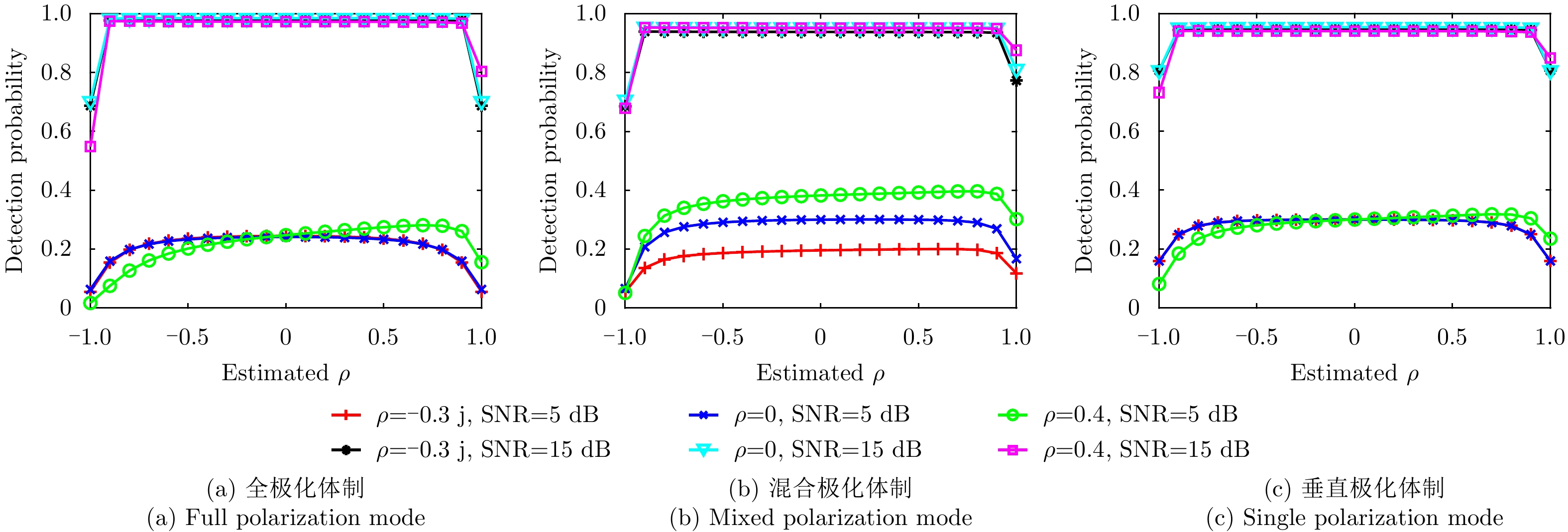
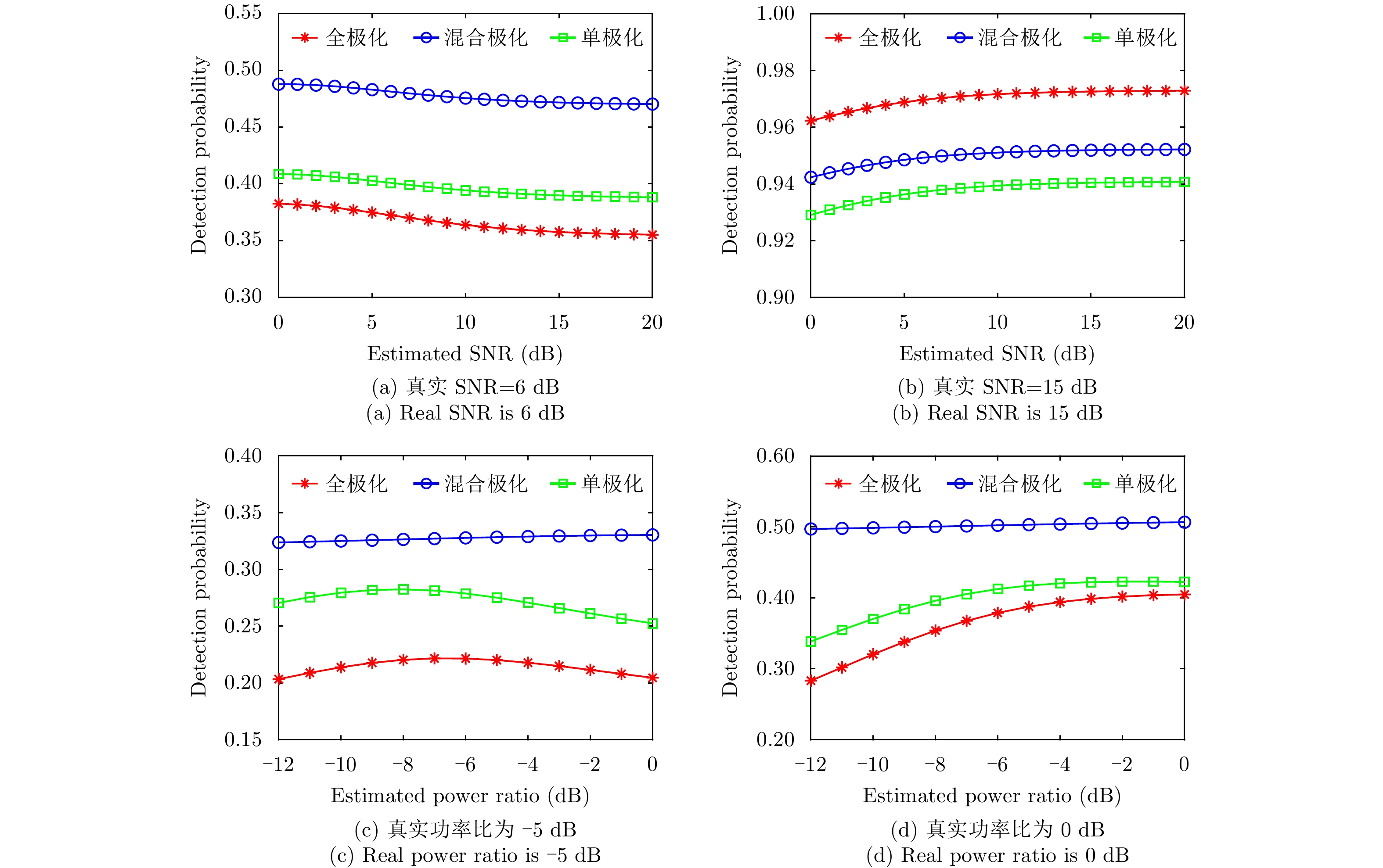
摘要: 针对全极化、混合极化和单极化3种典型体制的极化分集雷达(PDR)系统,该文分析了目标极化散射特性对系统检测性能的影响。基于目标极化散射统计模型和雷达接收电压方程,分别推导了3种体制下的目标回波向量的统计特性。在高斯背景下,设计了奈曼-皮尔逊准则下的最优极化分集多通道融合检测算法,并推导了虚警概率和检测概率的闭式表达式。仿真结果表明,当系统信噪比(SNR)一定时,目标极化散射分量间的相关性是影响系统检测性能的主要因素,特别是匹配极化散射分量和交叉极化散射分量间的相关性。此外,全极化体制和单极化体制的检测性能比混合极化体制稳健。Abstract: This study investigates the influence of the target polarization scattering characteristics on the detection performance of Polarization Diversity Radar (PDR) system with three typical working modes: full polarization mode, mixed polarization mode, and single polarization mode. The statistical properties of target echo signal corresponding to the three modes are separately deduced based on the statistical model of target polarization scattering and the receiving voltage equations. Furthermore, the optimal polarization diversity multi-channel fusion detection algorithm is designed under the Neyman-Pearson criterion in the background of Gaussian distribution, and closed-form expressions of probability of false alarm and detection are derived. The simulation results show that the correlations between the polarization scattering components of the target, particularly the correlations between the matched and cross polarization scattering components of the target, have greater effect on the detection performance of PDR for a given system Signal-to-Noise Ratio (SNR). In addition, the detection performance of the full and single polarization modes is more robust than that of the mixed polarization mode.
-
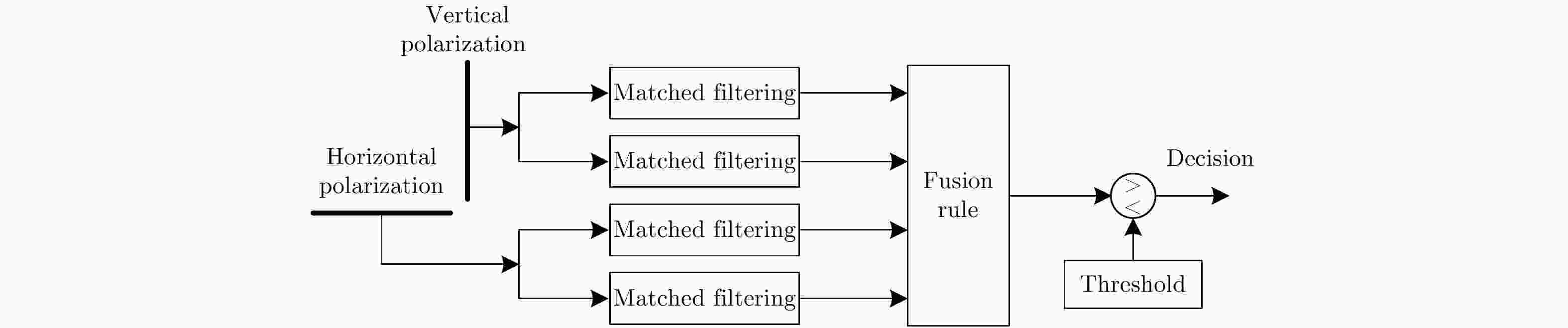
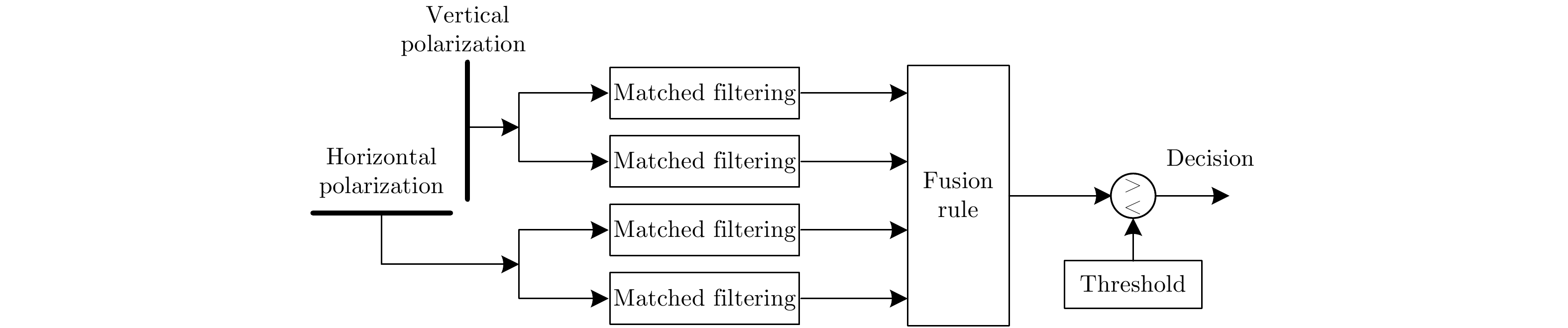
图 1 极化分集雷达接收端信号处理原理框图
Figure 1. The schematic diagram of signal processing at receiver of PDR
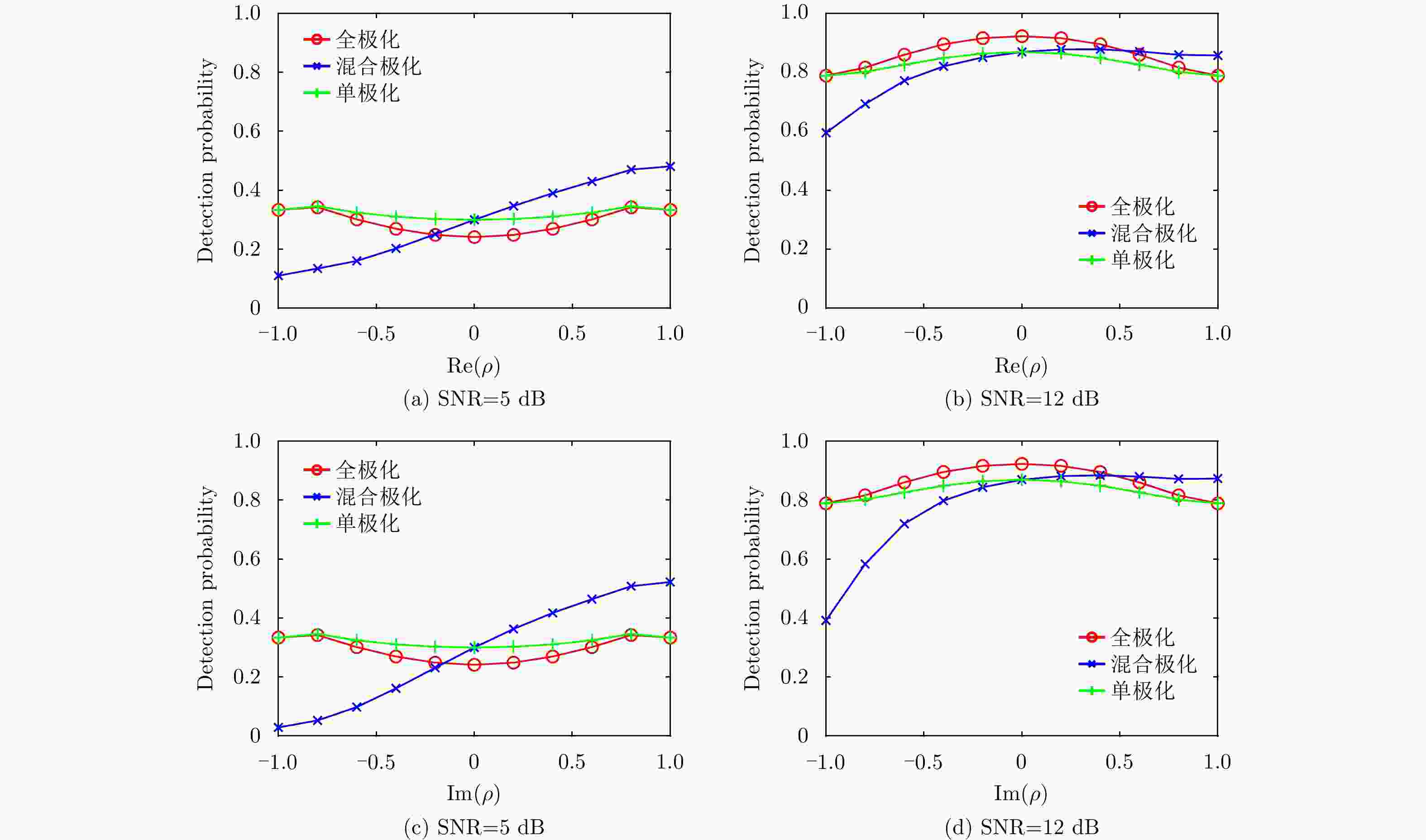
图 4 检测概率与
$\rho $ 实部/虚部的关系Figure 4. Detection probability versus the real/imaginary part of
$\rho $ -
[1] GIULI D. Polarization diversity in radars[J]. Proceedings of the IEEE, 1986, 74(2): 245–269. doi: 10.1109/PROC.1986.13457 [2] NOVAK L M, SECHTIN M B, and CARDULLO M J. Studies of target detection algorithms that use polarimetric radar data[J]. IEEE Transactions on Aerospace and Electronic Systems, 1989, 25(2): 150–165. doi: 10.1109/7.18677 [3] 庄钊文, 肖顺平, 王雪松. 雷达极化信息处理及其应用[M]. 北京: 国防工业出版社, 1999: 10–12.ZHUANG Zhaowen, XIAO Shunping, and WANG Xuesong. Radar Polarization Information Processing and Application[M]. Beijing: National Defend Industry Press, 1999: 10–12. [4] 王伟国, 赵宜楠, 乔晓林. 复合高斯杂波中距离分布目标的极化自适应检测[J]. 宇航学报, 2012, 33(8): 1138–1143. doi: 10.3873/j.issn.1000-1328.2012.08.020WANG Weiguo, ZHAO Yi’nan, and QIAO Xiaolin. Polarimetric adaptive detection for range-distributed targets in compound-Gaussian clutter[J]. Journal of Astronautics, 2012, 33(8): 1138–1143. doi: 10.3873/j.issn.1000-1328.2012.08.020 [5] CHENG Xu, SHI Longfei, CHANG Yuliang, et al. Novel polarimetric detector for target detection in heterogeneous clutter[J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1135–1141. doi: 10.21629/JSEE.2016.06.01 [6] CHANG Yuliang, LI Yongzhen, WANG Xuesong, et al. New target detection method in strong active jamming background for polarimetric radar[C]. Proceedings of the IEEE 10th International Conference on Signal Processing Proceedings, Beijing, China, 2010: 1947–1950. doi: 10.1109/ICOSP.2010.5656069. [7] 程旭. 全极化雷达目标检测与参数估计方法研究[D]. [博士论文], 国防科学技术大学, 2016: 47–66.CHENG Xu. Study on target detection and parameter estimation approaches of fully polarimetric radar[D]. [Ph.D. dissertation], National University of Defense Technology, 2016: 47–66. [8] 吕弘, 彭雅莉, 周顺先. 采用收发极化联合优化的极化雷达目标检测新算法[J]. 重庆大学学报, 2018, 41(3): 58–66. doi: 10.11835/j.issn.1000-582X.2018.03.007LYU Hong, PENG Yali, and ZHOU Shunxian. A novel target detection algorithm of polarimetric radar based on joint transmit and receive polarization optimization[J]. Journal of Chongqing University, 2018, 41(3): 58–66. doi: 10.11835/j.issn.1000-582X.2018.03.007 [9] 张晶. 基于极化分集技术的雷达抗干扰与优化检测研究[D]. [博士论文], 哈尔滨工程大学, 2014: 37–119.ZHANG Jing. Research on radar anti-interference and optimization detection based on polarization diversity technology[D]. [Ph.D. dissertation], Harbin Engineering University, 2014: 37–119. [10] CUI Guolong, KONG Lingjiang, YANG Xiaobo, et al. The Rao and Wald tests designed for distributed targets with polarization MIMO radar in compound-Gaussian clutter[J]. Circuits, Systems, and Signal Processing, 2012, 31(1): 237–254. doi: 10.1007/s00034-010-9250-0 [11] 赵宜楠, 姜智卓, 唐晨亮, 等. 复合高斯杂波中极化MIMO雷达的自适应检测[J]. 系统工程与电子技术, 2015, 37(11): 2474–2479. doi: 10.3969/j.issn.1001-506X.2015.11.08ZHAO Yi’nan, JIANG Zhizhuo, TANG Chenliang, et al. Adaptive detection of polarimetric MIMO radar in compound-Gaussian clutter[J]. Systems Engineering and Electronics, 2015, 37(11): 2474–2479. doi: 10.3969/j.issn.1001-506X.2015.11.08 [12] LI Na, CUI Guolong, KONG Lingjiang, et al. Moving target detection for polarimetric multiple-input multiple-output radar in Gaussian clutter[J]. IET Radar, Sonar & Navigation, 2015, 9(3): 285–298. doi: 10.1049/iet-rsn.2014.0157 [13] COLONE F and LOMBARDO P. Non-coherent adaptive detection in passive radar exploiting polarimetric and frequency diversity[J]. IET Radar, Sonar & Navigation, 2016, 10(1): 15–23. doi: 10.1049/iet-rsn.2015.0104 [14] GAO Wei, YANG Fan, CUI Yi, et al. The extended polarimetric whitening filter and its application to target detection in polarimetric synthetic aperture radar images[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(3): 419–423. doi: 10.1109/LGRS.2016.2517089 [15] SHI Hao, ZHANG Qingjun, BIAN Mingming, et al. A novel ship detection method based on gradient and integral feature for single-polarization synthetic aperture radar imagery[J]. Sensors, 2018, 18(2): 563. doi: 10.3390/s18020563 [16] SINCLAIR G. The transmission and reception of elliptically polarized waves[J]. Proceedings of the IRE, 1950, 38(2): 148–151. doi: 10.1109/JRPROC.1950.230106 [17] BORGEAUD M, SHI R T, and KONG J A. Theoretical models for polarimetric radar clutter[J]. Journal of Electromagnetic Waves and Applications, 1987, 1(1): 73–89. doi: 10.1163/156939387X00108 [18] 赵树杰, 赵建勋. 信号检测与估计理论[M]. 第2版, 北京: 电子工业出版社, 2013: 55–56.ZHAO Shujie and ZHAO Jianxun. Signal Detection and Estimation Theory[M]. 2nd ed, Beijing: Publishing House of Electronics Industry, 2013: 55–56. -

 下载:
下载:





图(6)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

