
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 对于集中式多输入多输出(Multiple-Input Multiple-Output, MIMO)雷达,该文研究了高斯杂波背景下的目标检测问题。该文假设杂波的协方差矩阵是未知随机的,且服从逆复Wishart分布,基于贝叶斯方法和广义似然比检验准则设计了两种新型自适应检测器。该文提出的贝叶斯检测器具有两个显著的优点:(1)不需要训练数据;(2)杂波的先验知识体现在设计方案中,从而提高了检测性能。仿真结果显示该文提出的贝叶斯检测器的检测性能优于目前常用的非贝叶斯检测器,特别是在发射波形采样数较少时。另外,该贝叶斯检测器在参数失配条件下的性能会有一定程度下降。
-
关键词:
- 多输入多输出雷达 /
- 自适应检测 /
- 贝叶斯 /
- 逆复Wishart分布 /
- 广义似然比检验
Abstract: For collocated Multiple-Input Multiple-Output (MIMO) radar, we investigate the target detection problem in Gaussian clutter with an unknown but random covariance matrix. An inverse complex Wishart distribution is chosen as prior knowledge for the random covariance matrix. We propose two detectors in the Bayesian framework based on the criteria of the Generalized Likelihood Ratio Test. The two main advantages of the proposed Bayesian detectors are as follows: (1) no training data are required; and (2) a prior knowledge about the clutter is incorporated in the decision rules to achieve detection performance gains. Numerical simulations show that the proposed Bayesian detectors outperform the current commonly used non-Bayesian counterparts, particularly when the sample number of the transmitted waveform is small. In addition, the performance of the proposed detector will decline in parameter mismatched situation. -
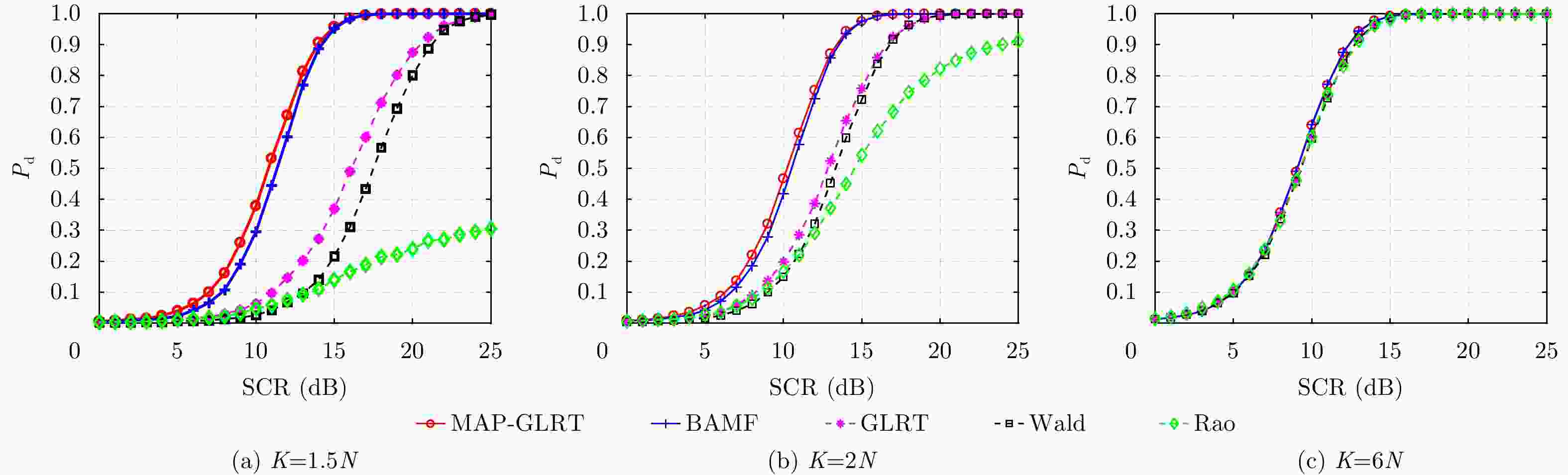
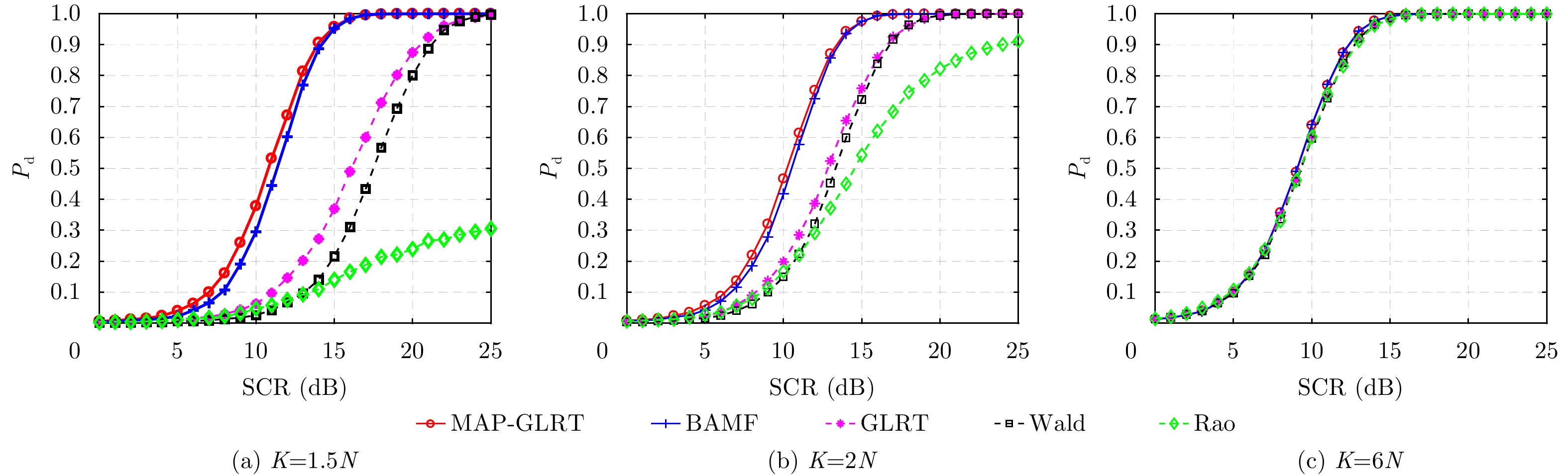
图 2 K 取不同值时
${{{P}}_{\rm{d}}}$ 关于SCR的曲线Figure 2.
${{{P}}_{\rm{d}}}$ versus SCR for different K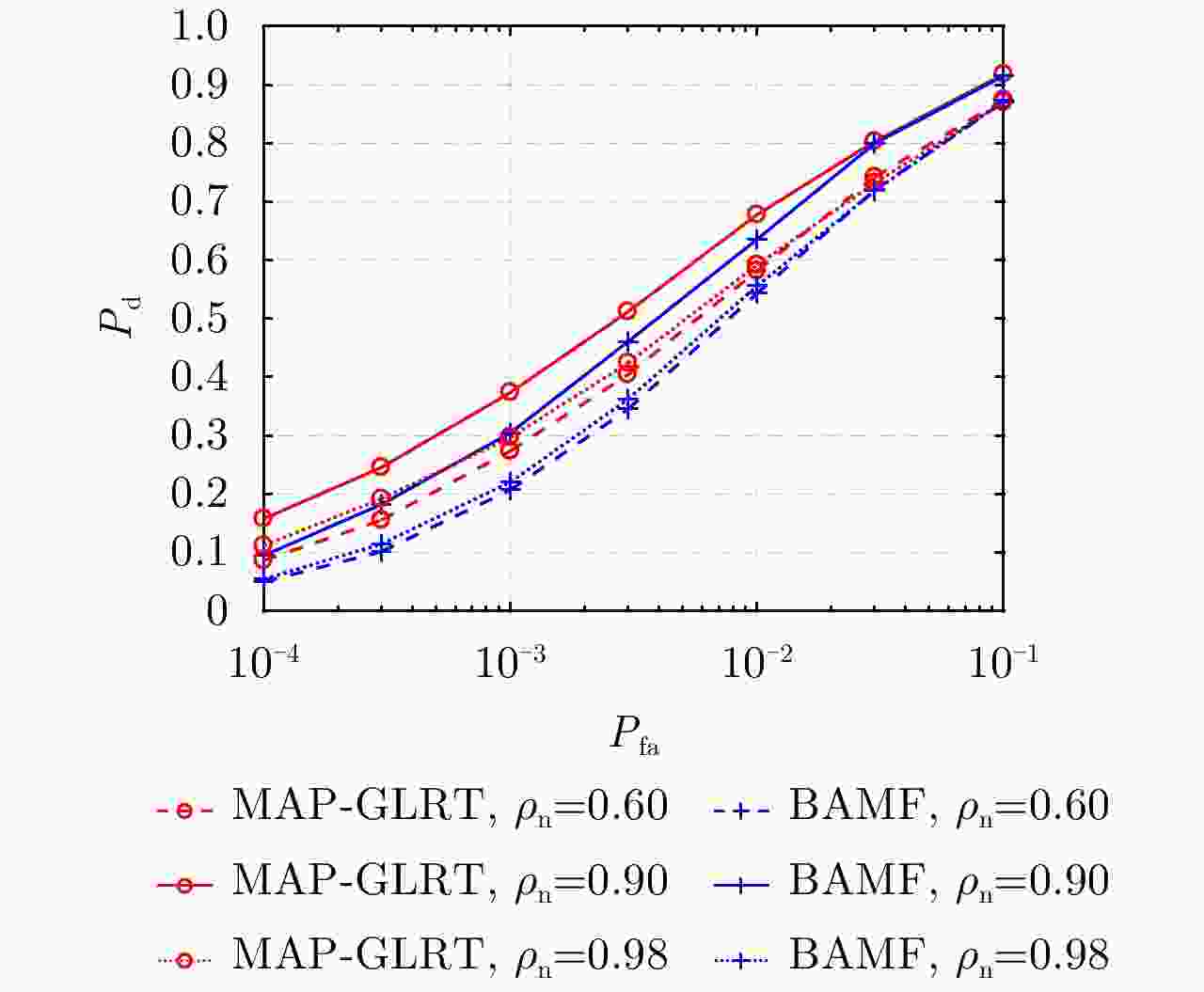
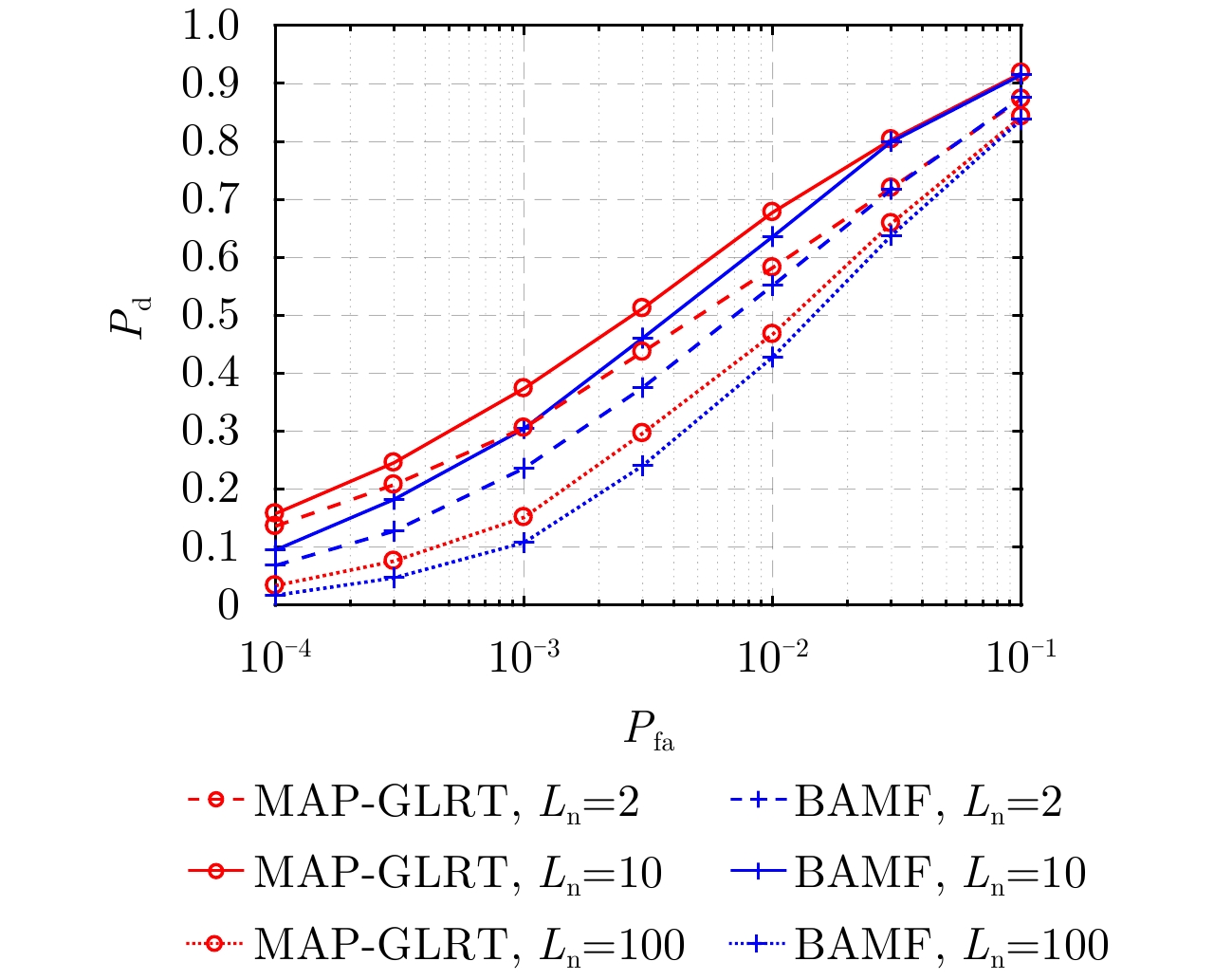
图 4 1阶迟滞相关系数失配时检测器的ROC曲线
Figure 4. ROC curves when one-lag correlation coefficient is mismatched
-
[1] LI Jian and STOICA P. MIMO Radar Signal Processing[M]. Hoboken, NJ: John Wiley & Sons, 2009. [2] TANG Bo, NAGHSH M M, and TANG Jun. Relative entropy-based waveform design for MIMO radar detection in the presence of clutter and interference[J]. IEEE Transactions on Signal Processing, 2015, 63(14): 3783–3796. doi: 10.1109/TSP.2015.2423257 [3] 周伟, 刘永祥, 黎湘, 等. MIMO-SAR技术发展概况及应用浅析[J]. 雷达学报, 2014, 3(1): 10–18. doi: 10.3724/SP.J.1300.2013.13074ZHOU Wei, LIU Yongxiang, LI Xiang, et al. Brief analysis on the development and application of multi-input multi-output synthetic aperture radar[J]. Journal of Radars, 2014, 3(1): 10–18. doi: 10.3724/SP.J.1300.2013.13074 [4] 王珽, 赵拥军, 胡涛. 机载MIMO雷达空时自适应处理技术研究进展[J]. 雷达学报, 2015, 4(2): 136–148. doi: 10.12000/JR14091WANG Ting, ZHAO Yongjun, and HU Tao. Overview of space-time adaptive processing for airborne MIMO radar[J]. Journal of Radars, 2015, 4(2): 136–148. doi: 10.12000/JR14091 [5] HAIMOVICH A M, BLUM R S, and CIMINI L J. MIMO radar with widely separated antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116–129. doi: 10.1109/MSP.2008.4408448 [6] ZHOU Shenghua, LIU Hongwei, ZHAO Yongbo, et al. Target spatial and frequency scattering diversity property for diversity MIMO radar[J]. Signal Processing, 2011, 91(2): 269–276. doi: 10.1016/j.sigpro.2010.07.004 [7] TANG Bo and TANG Jun. Joint design of transmit waveforms and receive filters for MIMO radar space-time adaptive processing[J]. IEEE Transactions on Signal Processing, 2016, 64(18): 4707–4722. doi: 10.1109/TSP.2016.2569431 [8] TANG Bo, ZHANG Yu, and TANG Jun. An efficient minorization maximization approach for MIMO radar waveform optimization via relative entropy[J]. IEEE Transactions on Signal Processing, 2018, 66(2): 400–411. doi: 10.1109/TSP.2017.2771726 [9] 金镇, 谢良贵, 文树梁. 分布式MIMO雷达单脉冲测角[J]. 雷达学报, 2014, 3(4): 474–479. doi: 10.3724/SP.J.1300.2014.13077JIN Zhen, XIE Lianggui, and WEN Shuliang. Distributed MIMO radar monopulse angular estimation[J]. Journal of Radars, 2014, 3(4): 474–479. doi: 10.3724/SP.J.1300.2014.13077 [10] LI Jian and STOICA P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114. doi: 10.1109/MSP.2007.904812 [11] AUBRY A, DE MAIO A, and HUANG Yongwei. MIMO radar beampattern design via PSL/ISL optimization[J]. IEEE Transactions on Signal Processing, 2016, 64(15): 3955–3967. doi: 10.1109/TSP.2016.2543207 [12] CUI Guolong, YU Xianxiang, CAROTENUTO V, et al. Space-time transmit code and receive filter design for colocated MIMO radar[J]. IEEE Transactions on Signal Processing, 2017, 65(5): 1116–1129. doi: 10.1109/TSP.2016.2633242 [13] CUI Guolong, LI Hongli, and RANGASWAMY M. MIMO radar waveform design with constant modulus and similarity constraints[J]. IEEE Transactions on Signal Processing, 2014, 62(2): 343–353. doi: 10.1109/TSP.2013.2288086 [14] 梁浩, 崔琛, 余剑. 十字型阵列MIMO雷达高精度二维DOA估计[J]. 雷达学报, 2016, 5(3): 254–264. doi: 10.12000/JR16016LIANG Hao, CUI Chen, and YU Jian. Two-dimensional DOA estimation with high accuracy for MIMO radar using cross array[J]. Journal of Radars, 2016, 5(3): 254–264. doi: 10.12000/JR16016 [15] HE Qian, LEHMANN N H, BLUM R S, et al. MIMO radar moving target detection in homogeneous clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 1290–1301. doi: 10.1109/TAES.2010.5545189 [16] 程子扬, 何子述, 王智磊, 等. 分布式MIMO雷达目标检测性能分析[J]. 雷达学报, 2017, 6(1): 81–89. doi: 10.12000/JR16147CHENG Ziyang, HE Zishu, WANG Zhilei, et al. Detection Performance analysis for distributed MIMO radar[J]. Journal of Radars, 2017, 6(1): 81–89. doi: 10.12000/JR16147 [17] HE Qian, BLUM R S, and HAIMOVICH A M. Noncoherent MIMO radar for location and velocity estimation: More antennas means better performance[J]. IEEE Transactions on Signal Processing, 2010, 58(7): 3661–3680. doi: 10.1109/TSP.2010.2044613 [18] FUHRMANN D R and SAN ANTONIO G. Transmit beamforming for MIMO radar systems using signal cross-correlation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(1): 171–186. doi: 10.1109/TAES.2008.4516997 [19] BEKKERMAN I and TABRIKIAN J. Target detection and localization using MIMO radars and sonars[J]. IEEE Transactions on Signal Processing, 2006, 54(10): 3873–3883. doi: 10.1109/TSP.2006.879267 [20] XU Luzhou, LI Jian, and STOICA P. Target detection and parameter estimation for MIMO radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 927–939. doi: 10.1109/TAES.2008.4655353 [21] DE MAIO A, LOPS M, and VENTURINO L. Diversity-integration tradeoffs in MIMO detection[J]. IEEE Transactions on Signal Processing, 2008, 56(10): 5051–5061. doi: 10.1109/TSP.2008.928693 [22] CUI Guolong, KONG Lingjiang, YANG Xiaobo, et al. The Rao and Wald tests designed for distributed targets with polarization MIMO radar in compound-Gaussian clutter[J]. Circuits, Systems, and Signal Processing, 2012, 31(1): 237–254. doi: 10.1007/s00034-010-9250-0 [23] ZHANG Tianxian, CUI Guolong, KONG Lingjiang, et al. Adaptive Bayesian detection using MIMO radar in spatially heterogeneous clutter[J]. IEEE Signal Processing Letters, 2013, 20(6): 547–550. doi: 10.1109/LSP.2013.2255272 [24] LIU Jun, LI Hongbin, and HIMED B. Persymmetric adaptive target detection with distributed MIMO radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1): 372–382. doi: 10.1109/TAES.2014.130652 [25] LI Jian, XU Luzhou, STOICA P, et al. Range compression and waveform optimization for MIMO radar: A CramÉr-Rao bound based study[J]. IEEE Transactions on Signal Processing, 2008, 56(1): 218–232. doi: 10.1109/TSP.2007.901653 [26] LIU Weijian, WANG Yongliang, LIU Jun, et al. Adaptive detection without training data in colocated MIMO radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2469–2479. doi: 10.1109/TAES.2015.130754 [27] LIU Jun, ZHOU Shenghua, LIU Weijian, et al. Tunable adaptive detection in colocated MIMO radar[J]. IEEE Transactions on Signal Processing, 2018, 66(4): 1080–1092. doi: 10.1109/TSP.2017.2778693 [28] ZHU Xumin, LI Jian, and STOICA P. Knowledge-aided space-time adaptive processing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1325–1336. doi: 10.1109/TAES.2011.5751261 [29] WANG Yikai, XIA Wei, and HE Zishu. CFAR knowledge-aided radar detection with heterogeneous samples[J]. IEEE Signal Processing Letters, 2017, 24(5): 693–697. doi: 10.1109/LSP.2017.2688386 [30] GAO Yongchan, LI Hongbin, and HIMED B. Knowledge-aided range-spread target detection for distributed MIMO radar in nonhomogeneous environments[J]. IEEE Transactions on Signal Processing, 2017, 65(3): 617–627. doi: 10.1109/TSP.2016.2625266 [31] KONG Lingjiang, LI Na, CUI Guolong, et al. Adaptive Bayesian detection for multiple-input multiple-output radar in compound-gaussian clutter with random texture[J]. IET Radar, Sonar & Navigation, 2016, 10(4): 689–698. doi: 10.1049/iet-rsn.2015.0241 [32] DE MAIO A, FARINA A, and FOGLIA G. Knowledge-aided Bayesian radar detectors & their application to live data[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(1): 170–183. doi: 10.1109/TAES.2010.5417154 [33] BILLINGSLEY J B, FARINA A, GINI F, et al. Statistical analyses of measured radar ground clutter data[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2): 579–593. doi: 10.1109/7.766939 [34] MELVIN W L and SHOWMAN G A. An approach to knowledge-aided covariance estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(3): 1021–1042. doi: 10.1109/TAES.2006.248216 -

 下载:
下载:




图(5)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

