
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Multi-target Micro-motion Feature Extraction Based on Tracking Pulses in MIMO Radar
-
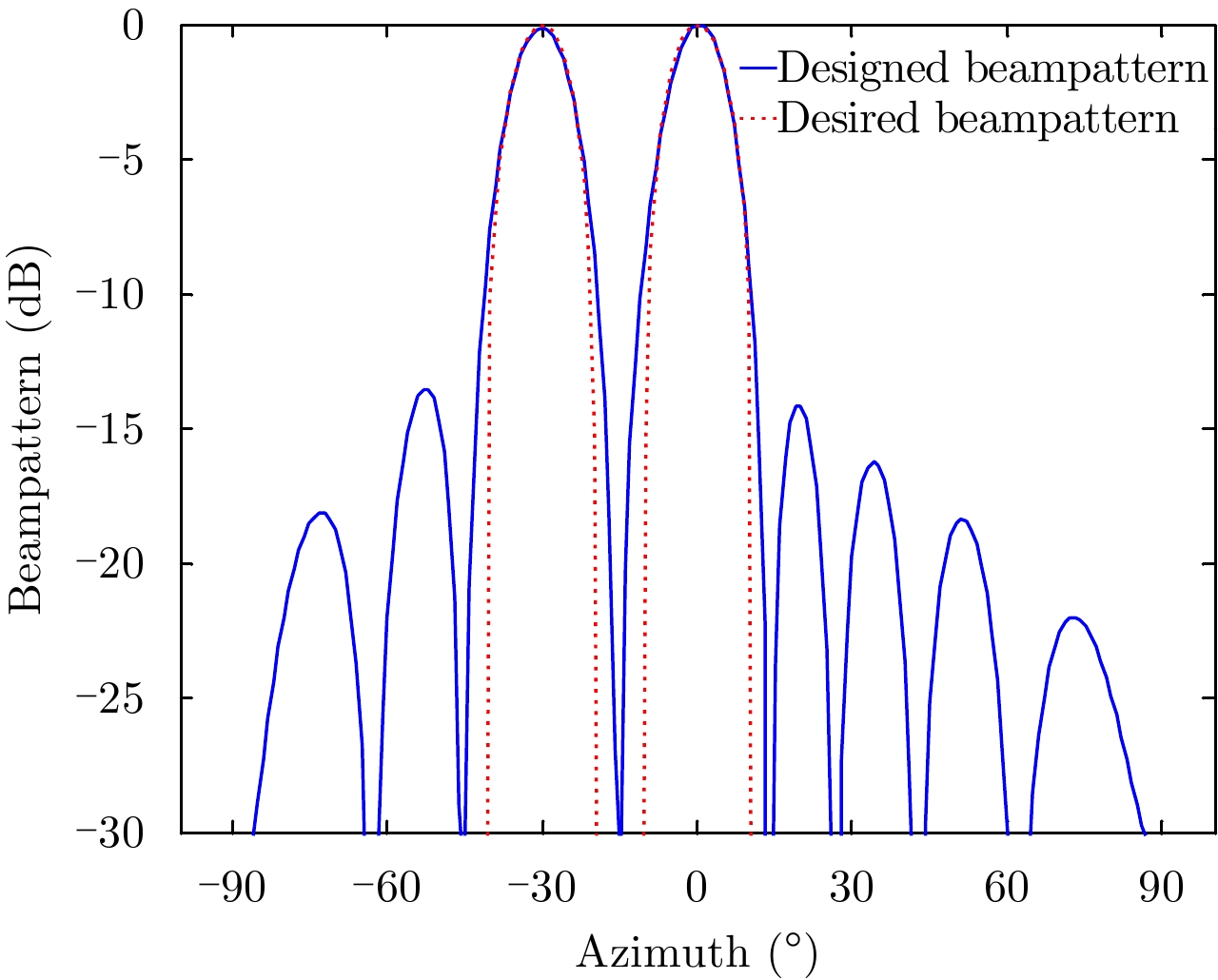
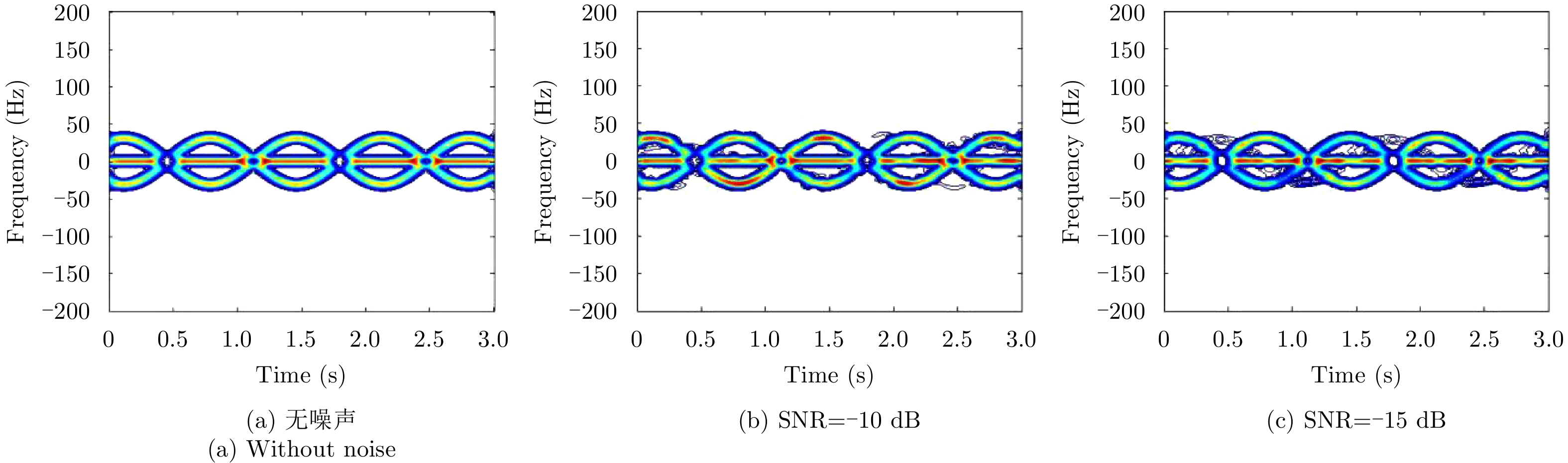
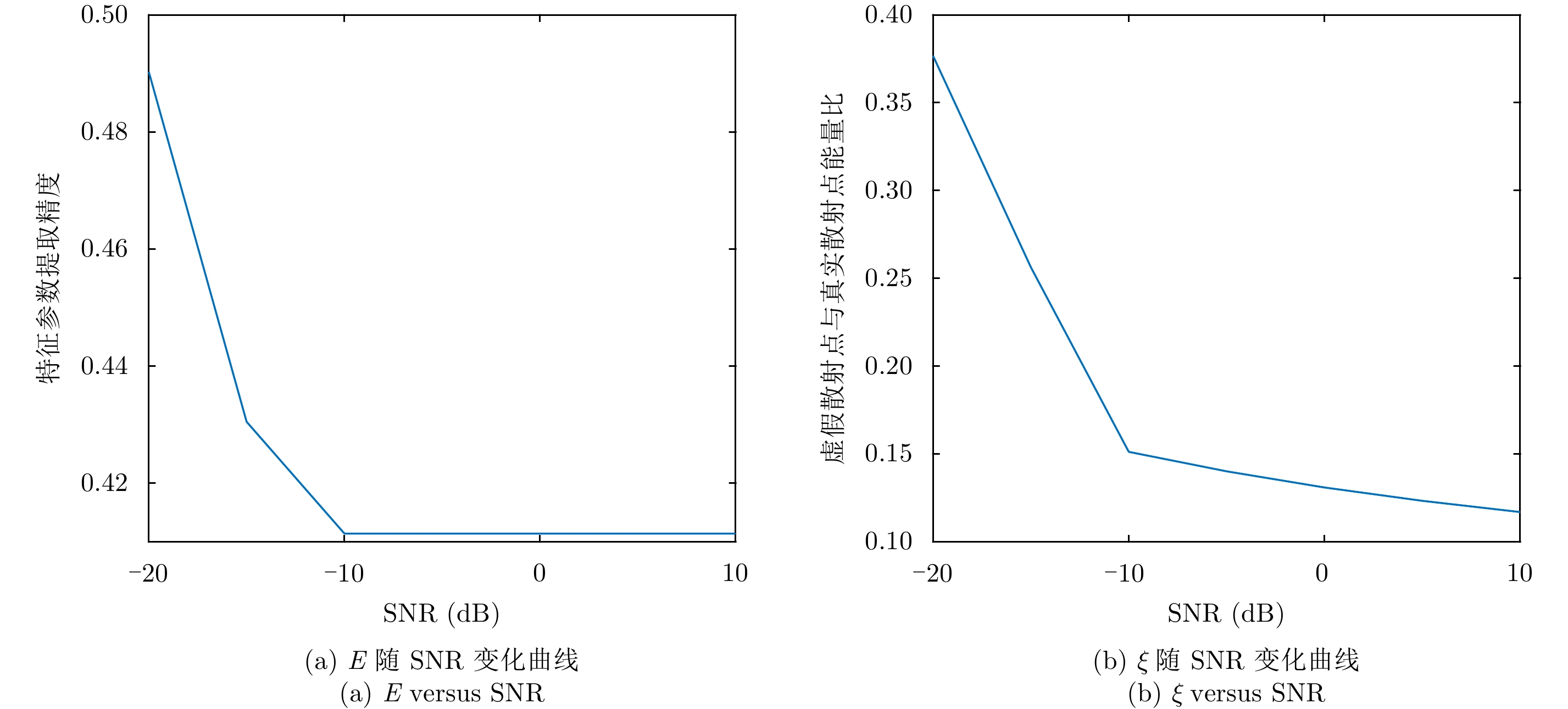
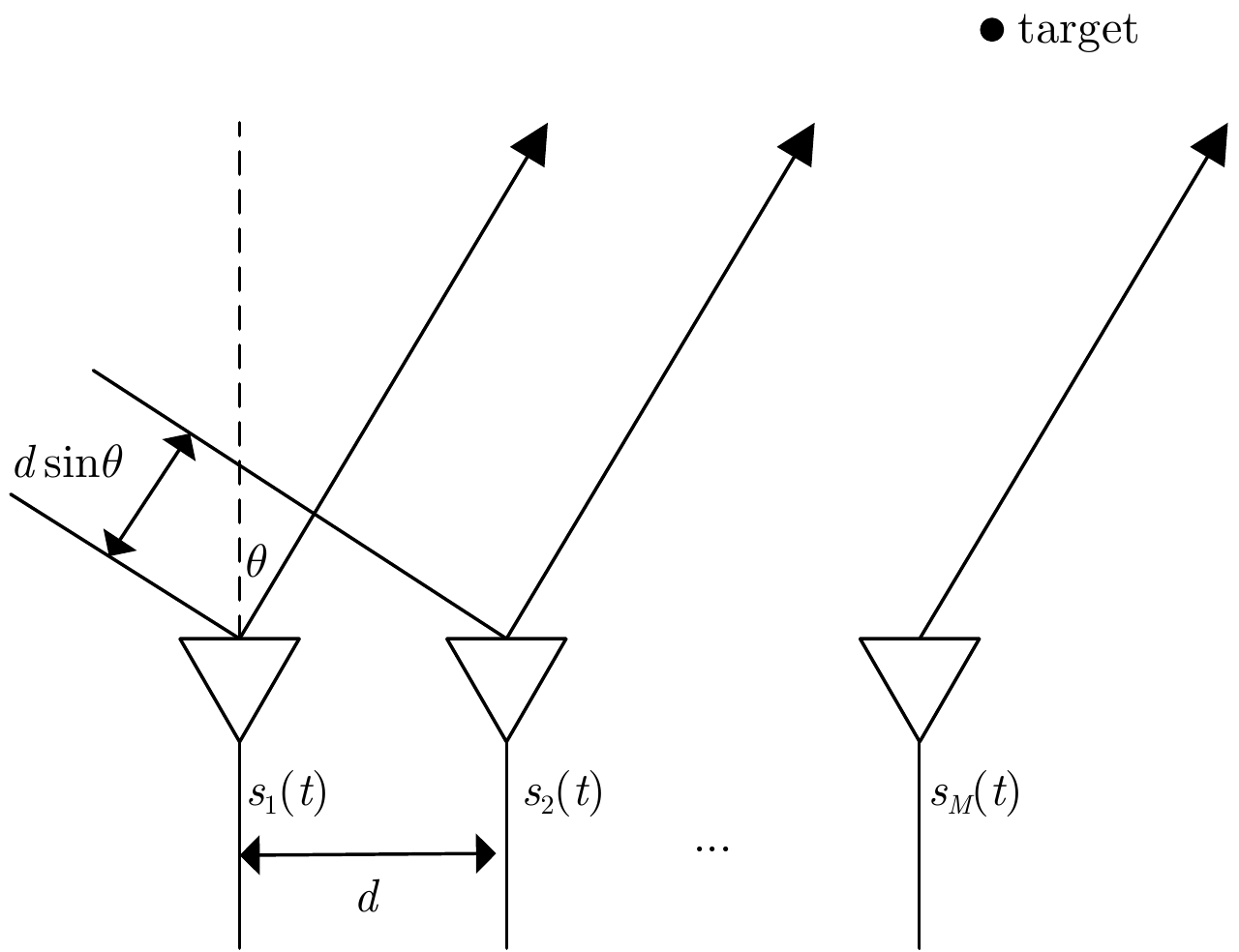
摘要: 微动特征是空间目标识别的重要特征信息之一。然而,现有的多功能多输入多输出(Multi-Input Multi-Output, MIMO)雷达通常需要在完成目标搜索和跟踪任务之后为目标微动特征提取分配大量连续的时间资源,导致目标识别实时性能和雷达系统整体工作性能均不高。针对该问题,该文提出了一种基于跟踪脉冲的MIMO雷达多目标微动特征提取方法。首先依据各目标的方位信息对MIMO雷达发射波形进行设计,为不同方向目标同时发射跟踪脉冲;在此基础上,综合考虑目标微动特征提取性能以及目标跟踪性能的需求,对跟踪脉冲的发射时间序列进行优化设计;最后,直接利用窄带跟踪脉冲实现对不同方向目标微动特征的同时提取,无需再为目标微动特征提取分配额外的时间资源,有效提升目标识别实时性和雷达工作效率。仿真实验表明,在信噪比大于–10 dB时,所提方法能够实现多目标微动特征的准确提取,具有良好的有效性和鲁棒性。Abstract: The micro-motion feature is one of the important characteristic information of spatial target recognition. However, the existing multifunctional Multi-Input Multi-Output (MIMO) radar usually has to allocate a large number of continuous time resources for target micro-motion feature extraction after target searching and tracking, which leads to a low real-time performance of target recognition and poor overall performance of radar system. To solve this problem, this paper presents a multi-target micro-motion feature extraction method for MIMO radar based on tracking pulses. First, according to the azimuth information of each target, the MIMO radar transmitting waveform is designed, and the tracking pulses are transmitted simultaneously for targets with different directions. On this basis, by considering the micro-motion feature extraction performance and the target tracking performance synthetically, the transmission time series of the tracking pulses are optimized. Finally, the narrowband tracking pulses are directly used to simultaneously extract the micro-motion features of the targets in different directions, which makes it no longer necessary to allocate additional radar resources for target feature extraction. Consequently, the real-time recognition performance and the working efficiency of radar are improved significantly. Simulations demonstrate that when the signal-to-noise ratio is larger than –10 dB, the micro-motion features of multi-targets can be extracted accurately, which verifies the effectiveness and robustness of the proposed method.
-
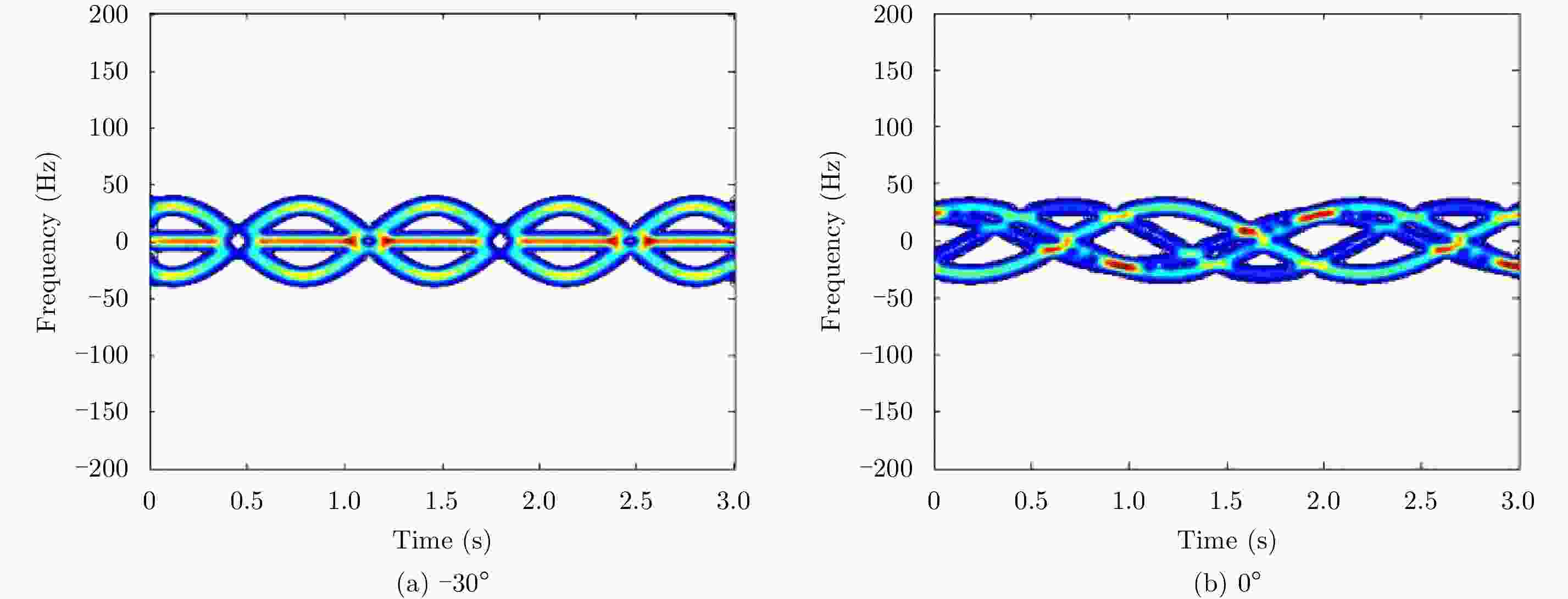
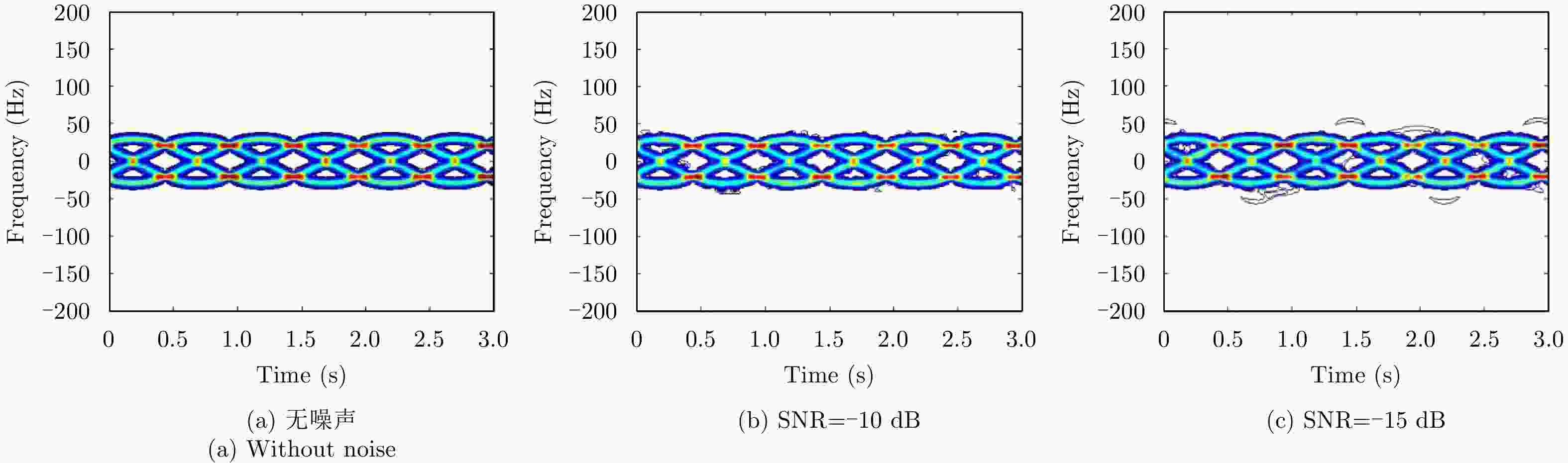
图 7 0°方向所提方法重构的时频分布
Figure 7. The reconstructed time-frequency distribution in 0° direction using the proposed method
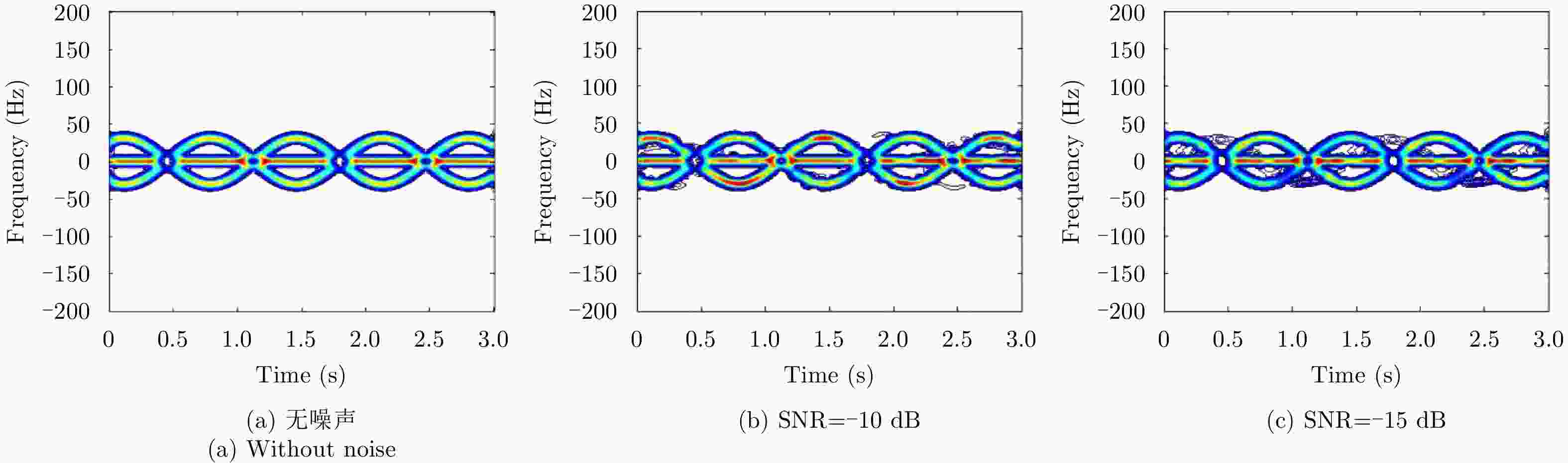
图 6 –30°方向所提方法重构的时频分布
Figure 6. The reconstructed time-frequency distribution in –30° direction using the proposed method
表 1 目标参数
Table 1. The parameters of the targets
目标方位(°) 参考点坐标(km) 旋转角速度 $\left( {\rm{rad}} \cdot {{\rm{s}}^{{\rm{ - 1}}}}\right) $ 目标散射点坐标(m) –30 (15, 26, 0) ${\rm{(}}{π} {\rm{,}}{π} {\rm{/2,}}{π} {\rm{)}}$ $(0,0,0),({\rm{1}},{\rm{1}},{\rm{0}}),( - {\rm{1}}, - {\rm{1}},{\rm{0}})$ 0 (0, 40, 0) ${\rm{(0,0,}}{π} {\rm{)}}$ $(2,0,0),( - 2,0,0),(0, - 2,0),(0,2,0)$  下载: 导出CSV
下载: 导出CSV
表 2 文献[18]方法目标微动特征提取结果
Table 2. The micro-motion features of targets obtained by method in Ref. [18]
目标方向(°) 特征参数序号 目标散射点坐标 ${{r}_0}$ (m) 旋转角速度 ${{w}}$ $\left( {\rm{rad}} \cdot {{\rm{s}}^{{\rm{ - 1}}}}\right) $ 系数A –30 1 $(0.1 \ 0 \ - 0.1)$ $(3.14 \ 1.57 \ 3.14)$ 30.40 2 $({\rm{1 \ 1 \ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 27.07 3 $( - {\rm{1.0 }}\ - {\rm{1.1}} \ {\rm{ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 25.11 4 $({\rm{0}}{\rm{.3 }}\ 0\ {\rm{ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 5.96 5 $(1.5 \ - {\rm{1.2}}\ {\rm{0}})$ $(2.83 \ 1.57 \ 3.14)$ 4.29 0 1 $( - 1.8 \ 0.1 \ 0)$ $(0.31 \ 0 \ 2.51)$ 29.15 2 $(0.1 \ - 1.9 \ 0)$ $(0.31 \ 0 \ 2.51)$ 28.10 3 $(0.5 \ 2.4 \ 0)$ $(0.31 \ 0 \ 2.51)$ 24.27 4 $(2.6 \ - 0.2 \ 0)$ $(0.31 \ 0 \ 2.51)$ 23.31 5 $( - 1.9 \ - {\rm{0.4 }}\ {\rm{0}})$ $(0 \ 0.31 \ 2.83)$ 3.15
下载: 导出CSV
表 3 无噪声条件下所提方法目标微动特征提取结果
Table 3. The micro-motion features of targets obtained by the proposed method without noise
目标方向(°) 特征参数序号 目标散射点坐标 ${{r}_0}$ (m) 旋转角速度 ${{w}}$ ( ${\rm{rad}} \cdot {{\rm{s}}^{{\rm{ - 1}}}}$) 系数A –30 1 $(0.1 \ 0 \ - 0.1)$ $(3.14 \ 1.57 \ 3.14)$ 27.23 2 $({\rm{1 \ 1 \ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 26.47 3 $( - {\rm{1.0}} \ - {\rm{1.1}} \ {\rm{ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 26.01 4 $( - 1.3 \ - {\rm{1.2}}\ {\rm{0}})$ $(2.83 \ 1.57 \ 3.14)$ 6.40 5 $({\rm{0}}{\rm{.3 }} \ 0 \ {\rm{ 0}})$ $(3.14 \ 1.88 \ 3.14)$ 6.06 0 1 $(2.0 \ 0.1 \ 0)$ $(0 \ 0 \ 3.14)$ 28.63 2 $( - 1.9 \ 0 \ 0)$ $(0 \ 0 \ 3.14)$ 28.39 3 $(0.1 \ - 2.0 \ 0)$ $(0 \ 0 \ 3.14)$ 27.71 4 $(0 \ 1.9 \ 0)$ $(0 \ 0 \ 3.14)$ 27.19 5 $(1.8 \ 0.1 \ 0.3)$ $(0 \ 0.31 \ 2.83)$ 6.72
下载: 导出CSV
表 4 SNR=–10 dB条件下所提方法目标微动特征提取结果
Table 4. The micro-motion features of targets obtained by the proposed method when SNR=–10 dB
目标方向(°) 特征参数序号 目标散射点坐标 ${{r}_0}$ (m) 旋转角速度 ${{w}}$ $\left( {\rm{rad}} \cdot {{\rm{s}}^{{\rm{ - 1}}}}\right) $ 系数A –30 1 $(0.1 \ 0 \ - 0.1)$ $(3.14 \ 1.57 \ 3.14)$ 26.83 2 $({\rm{1 \ 1 \ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 25.48 3 $( - {\rm{1.0}} - {\rm{1.1}}\ {\rm{ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 25.09 4 $( - 1.3 \ - {\rm{1.2}}\ {\rm{ 0}})$ $(2.83 \ 1.57 \ 3.14)$ 7.78 5 $({\rm{0}}{\rm{.3 }}\ 0 \ {\rm{ 0}})$ $(3.14 \ 1.88 \ 3.14)$ 7.31 0 1 $(2.0 \ 0.1 \ 0)$ $(0 \ 0 \ 3.14)$ 27.52 2 $( - 1.9 \ 0 \ 0)$ $(0 \ 0 \ 3.14)$ 27.28 3 $(0.1 \ - 2.0 \ 0)$ $(0 \ 0 \ 3.14)$ 26.59 4 $(0 \ 1.9 \ 0)$ $(0 \ 0 \ 3.14)$ 26.08 5 $(1.8 \ 0.1 \ 0.3)$ $(0 \ 0.31 \ 2.83)$ 9.15
下载: 导出CSV
表 5 SNR=–15 dB条件下所提方法目标微动特征提取结果
Table 5. The micro-motion features of targets obtained by the proposed method when SNR=–15 dB
目标方向(°) 特征参数序号 目标散射点坐标 ${{r}_0}$ (m) 旋转角速度 ${{w}}$ $\left( {\rm{rad}} \cdot {{\rm{s}}^{{\rm{ - 1}}}}\right) $ 系数A –30 1 $(0.2 \ 0.1 \ - 0.1)$ $(3.14 \ 1.57 \ 3.14)$ 25.73 2 $({\rm{0.9}}{\rm{ \ 1.0 \ 0}})$ $(3.14 \ 1.57 \ 3.14)$ 23.27 3 $( - {\rm{1}}{\rm{.2 }}\ - {\rm{1.0}}\ {\rm{0.1}})$ $(3.14 \ 1.57 \ 3.14)$ 22.16 4 $( - 1.5 \ - {\rm{1.3}}\ {\rm{ 0}})$ $(2.83 \ 1.57 \ 3.14)$ 15.04 5 $({\rm{0}}{\rm{.8 }} \ 0 \ {\rm{ 0}}{\rm{.5}})$ $(2.83 \ 2.19 \ 3.14)$ 10.58 0 1 $(2.2 \ - 0.1 \ 0)$ $(0 \ 0 \ 3.14)$ 26.81 2 $( - 2.0 \ 0.1 \ 0)$ $(0 \ 0 \ 3.14)$ 25.35 3 $(0.2 \ - 1.8 \ 0)$ $(0 \ 0 \ 3.14)$ 25.19 4 $(0.1 \ 1.8 \ 0.2)$ $(0 \ 0 \ 3.14)$ 24.07 5 $(1.7 \ 0.3 \ 0.4)$ $(0 \ 0.31 \ 2.83)$ 13.15
下载: 导出CSV
-
[1] Zhang Q, Luo Y, and Chen Y A. Micro-Doppler Characteristics of Radar Targets[M]. Jonathan Simpson, United Kingdom: Elsevier Science, 2016: 4–6. [2] 杨琪, 邓彬, 王宏强, 等. 太赫兹雷达目标微动特征提取研究进展[J]. 雷达学报, 2018, 7(1): 22–45. DOI: 10.12000/JR17087Yang Qi, Deng Bin, Wang Hong-qiang, et al. Advancements in research on micro-motion feature extraction in the terahertz region[J]. Journal of Radars, 2018, 7(1): 22–45. DOI: 10.12000/JR17087 [3] 陈小龙, 董云龙, 李秀友, 等. 海面刚体目标微动特征建模及特性分析[J]. 雷达学报, 2015, 4(6): 630–638. DOI: 10.12000/JR15079Chen Xiao-long, Dong Yun-long, Li Xiu-you, et al. Modeling of micromotion and analysis of properties of rigid marine targets[J]. Journal of Radars, 2015, 4(6): 630–638. DOI: 10.12000/JR15079 [4] 冯存前, 李靖卿, 贺思三, 等. 组网雷达中弹道目标微动特征提取与识别综述[J]. 雷达学报, 2015, 4(6): 609–620. DOI: 10.12000/JR15084Feng Cun-qian, Li Jing-qing, He Si-san, et al. Micro-Doppler feature extraction and recognition based on netted radar for ballistic targets[J]. Journal of Radars, 2015, 4(6): 609–620. DOI: 10.12000/JR15084 [5] Chen V C, Li F, Ho S S, et al. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. [6] Bai X R, Zhou F, and Bao Z. High-resolution three-dimensional imaging of space targets in micromotion[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(7): 3428–3440. DOI: 10.1109/JSTARS.2015.2431119 [7] Li G and Varshney P K. Micro-Doppler parameter estimation via parametric sparse representation and pruned orthogonal matching pursuit[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(12): 4937–4948. DOI: 10.1109/JSTARS.2014.2318596 [8] Du L, Ma Y Y, Wang B S, et al. Noise-robust classification of ground moving targets based on time-frequency feature from micro-Doppler signature[J]. IEEE Sensors Journal, 2014, 14(8): 2672–2682. DOI: 10.1109/JSEN.2014.2314219 [9] 牛杰, 刘永祥, 秦玉亮, 等. 一种基于经验模态分解的锥体目标雷达微动特征提取新方法[J]. 电子学报, 2011, 39(7): 1712–1715Niu Jie, Liu Yong-xiang, Qin Yu-liang, et al. A new method of radar micro-motion feature extraction of cone target based on empirical mode decomposition[J]. Acta Electronica Sinica, 2011, 39(7): 1712–1715 [10] 何其芳, 张群, 罗迎, 等. 正弦调频Fourier-Bessel变换及其在微动目标特征提取中的应用[J]. 雷达学报, 待出版. DOI: 10.12000/JR17069He Qi-fang, Zhang Qun, Luo Ying, et al. A sinusoidal frequency modulation Fourier-Bessel transform and its application to micro-Doppler feature extraction[J]. Journal of Radars, in press. DOI: 10.12000/JR17069 [11] Li J and Stoica P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114. DOI: 10.1109/MSP.2007.904812 [12] Ma C Z, Yeo T S, Liu Z F, et al. Target imaging based on l1l0 norms homotopy sparse signal recovery and distributed MIMO antennas[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 3399–3414. DOI: 10.1109/TAES.2015.140939 [13] Li J, Stoica P, and Zheng X Y. Signal synthesis and receiver design for MIMO radar imaging[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3959–3968. DOI: 10.1109/TSP.2008.923197 [14] 李慧, 赵永波, 程增飞. 基于线性调频时宽的MIMO雷达正交波形设计[J]. 电子与信息学报, 2018, 40(5): 1151–1158. DOI: 10.11999/JEIT170426Li Hui, Zhao Yong-bo, and Cheng Zeng-fei. MIMO radar orthogonal waveform set design based on chirp durations[J]. Journal of Electronics&Information Technology, 2018, 40(5): 1151–1158. DOI: 10.11999/JEIT170426 [15] 李玉翔, 任修坤, 孙扬, 等. 一种循环迭代的宽带MIMO雷达正交稀疏频谱波形设计方法[J]. 电子与信息学报, 2017, 39(4): 953–959. DOI: 10.11999/JEIT160597Li Yu-xiang, Ren Xiu-kun, Sun Yang, et al. Cyclic iterative method for wideband MIMO radar orthogonal sparse frequency waveform design[J]. Journal of Electronics&Information Technology, 2017, 39(4): 953–959. DOI: 10.11999/JEIT160597 [16] Mallat S G and Zhang Z F. Matching pursuits with time-frequency dictionaries[J]. IEEE Transactions on Signal Processing, 1993, 41(12): 3397–3415. DOI: 10.1109/78.258082 [17] Chen Y J, Zhang Q, Ma C Z, et al. Micromotion feature extraction of radar target using tracking pulses with adaptive pulse repetition frequency adjustment[J]. Journal of Applied Remote Sensing, 2014, 8(1): 083569. DOI: 10.1117/1.JRS.8.083569 [18] 叶淋美. 基于压缩感知的雷达信号处理应用研究[D]. [硕士论文], 厦门大学, 2014: 17–34.Ye Lin-mei. Study on application of compressive sensing in radar signal processing[D]. [Master dissertation], Xiamen University, 2014: 17–34. -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

