
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Three-dimensional Geometry Reconstruction of Ship Targets with Complex Motion for Interferometric ISAR with Sparse Aperture
DOI: 10.12000/JR18019 cstr: 32380.14.JR18019
-
摘要: 基于正交双基线的3维干涉逆合成孔径雷达(ISAR)成像技术可获得目标的3维坐标信息,这对目标的分类与识别是非常有利的。然而,实际情况下回波数据一般都是稀疏的,这对传统的干涉成像技术带来一定的挑战。该文提出一种稀疏孔径情况下的舰船目标3维干涉成像算法,并采用最小熵方法实现回波数据的运动补偿与图像配准,同时基于梯度算子实现对稀疏数据的精确恢复。通过对方位向数据进行参数估计与压缩处理,可获得目标的2维ISAR成像结果,进而基于干涉技术实现对复杂运动舰船目标的3维成像。仿真数据验证了文中方法的有效性。
-
关键词:
- 3维干涉ISAR成像 /
- 稀疏孔径 /
- 梯度算法 /
- 参数估计
Abstract: Three-Dimensional (3-D) Interferometric Inverse Synthetic Aperture Radar (InISAR) imaging system based on the orthogonal double baseline can achieve the 3-D geometric reconstruction of a target effectively, which is extremely helpful in target classification and identification. However, only sparse aperture measurements are available in the actual imaging process, which might pose some challenges to the traditional InISAR imaging algorithms. In this study, a new method of 3-D InISAR imaging of a ship with sparse aperture is presented. Minimum entropy algorithms are adopted to realize motion compensation and image coregistration of the sparse echoes. A gradient-based technique is used to achieve highly accurate signal reconstruction for the sparse aperture. A two-Dimensional (2-D) ISAR image was achieved with azimuth compression via the parameters-estimation method, and the 3-D reconstruction of a ship was achieved via the interference approach. The obtained simulation results validate the feasibility of the presented approach. -
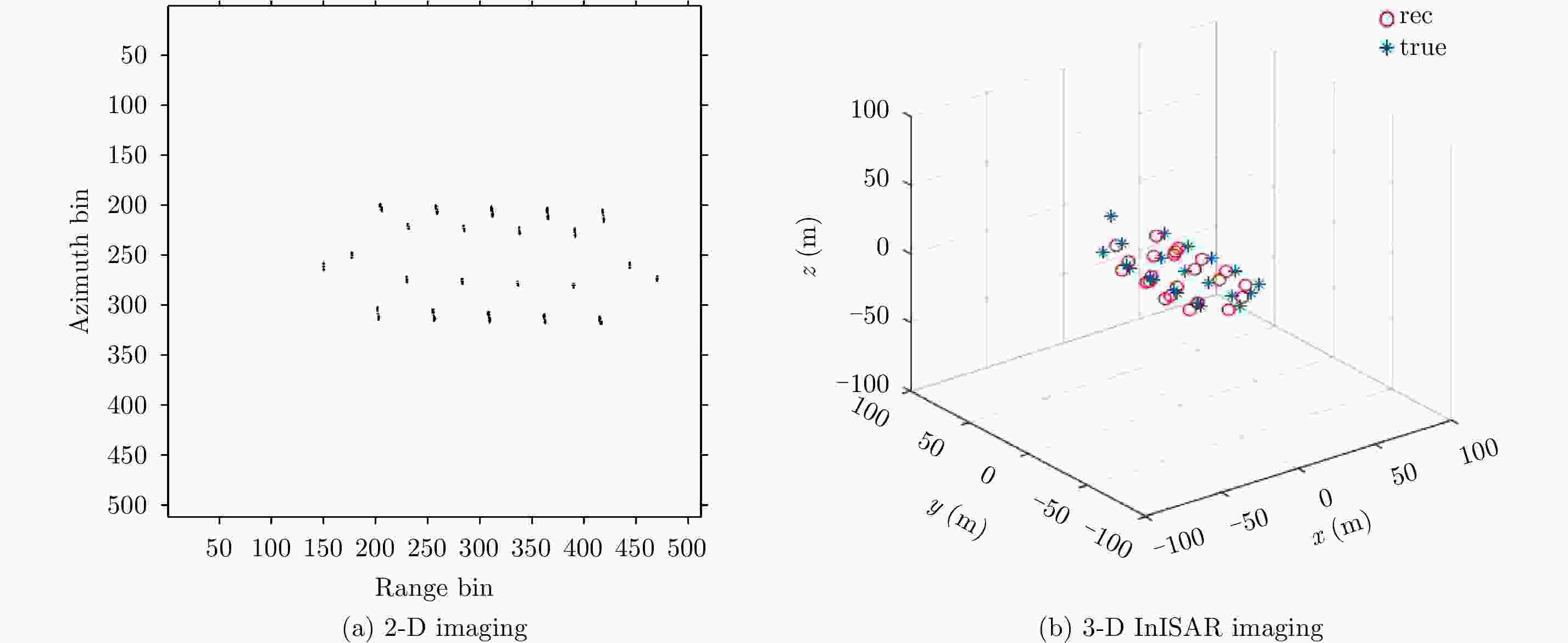
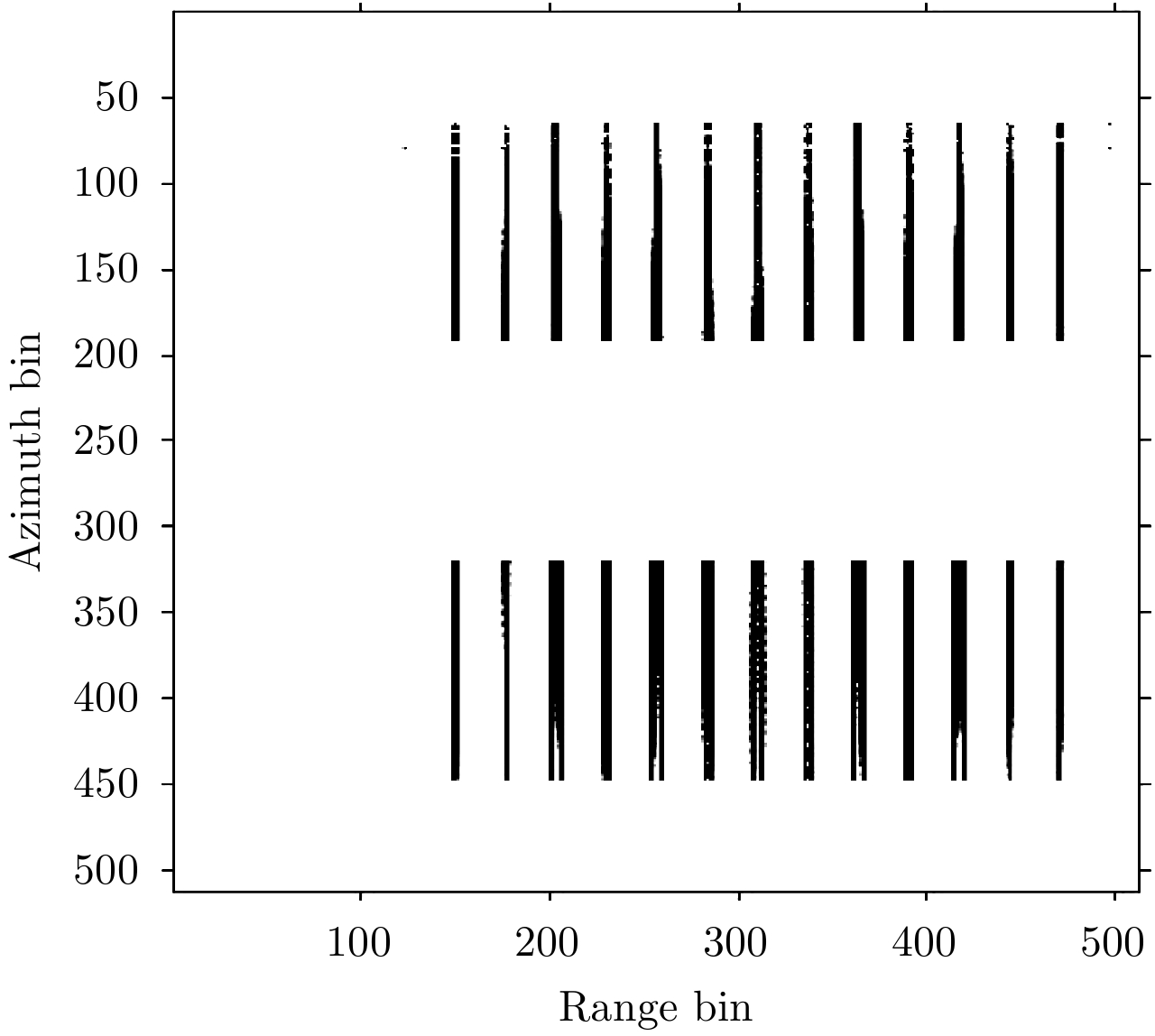
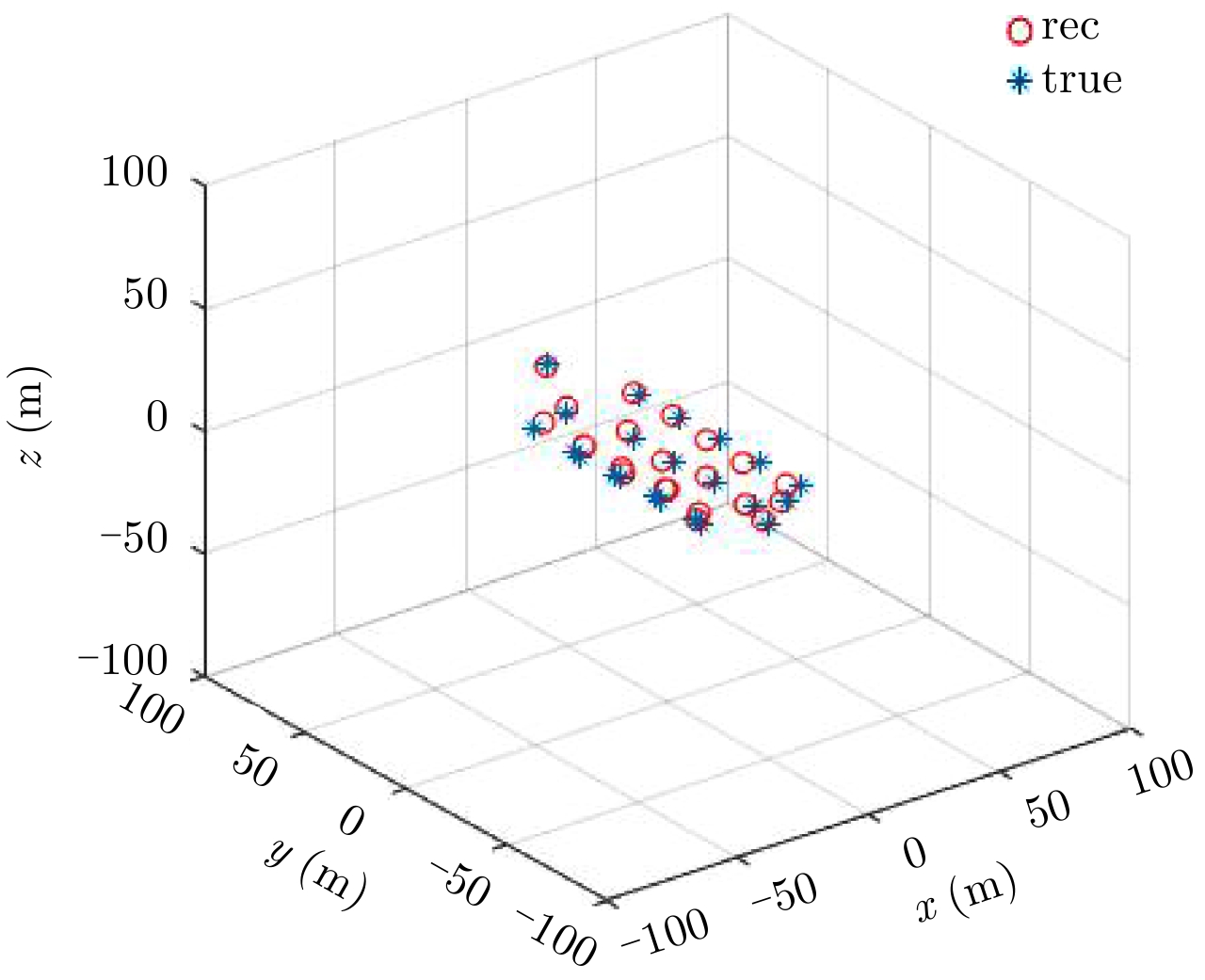
Figure 15. The images of the target with 2/4 sparse aperture data (GMS) by using the OMP algorithm
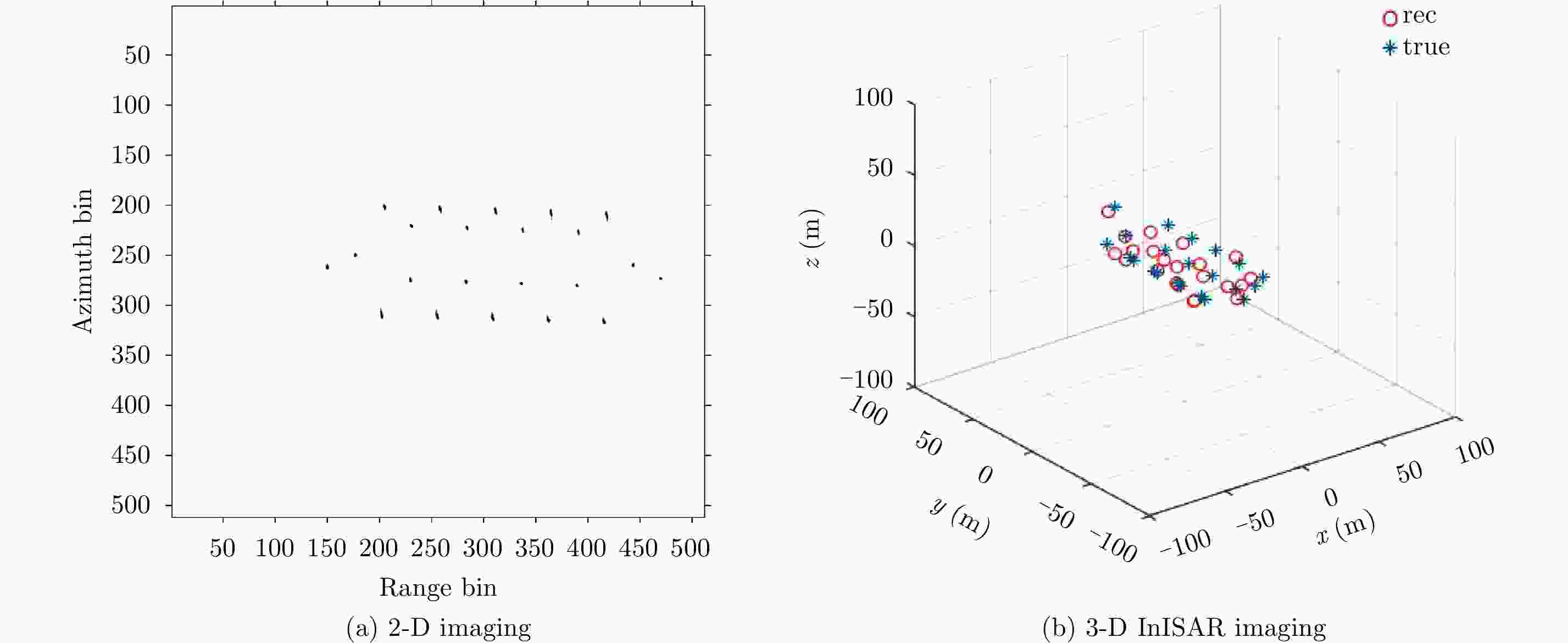
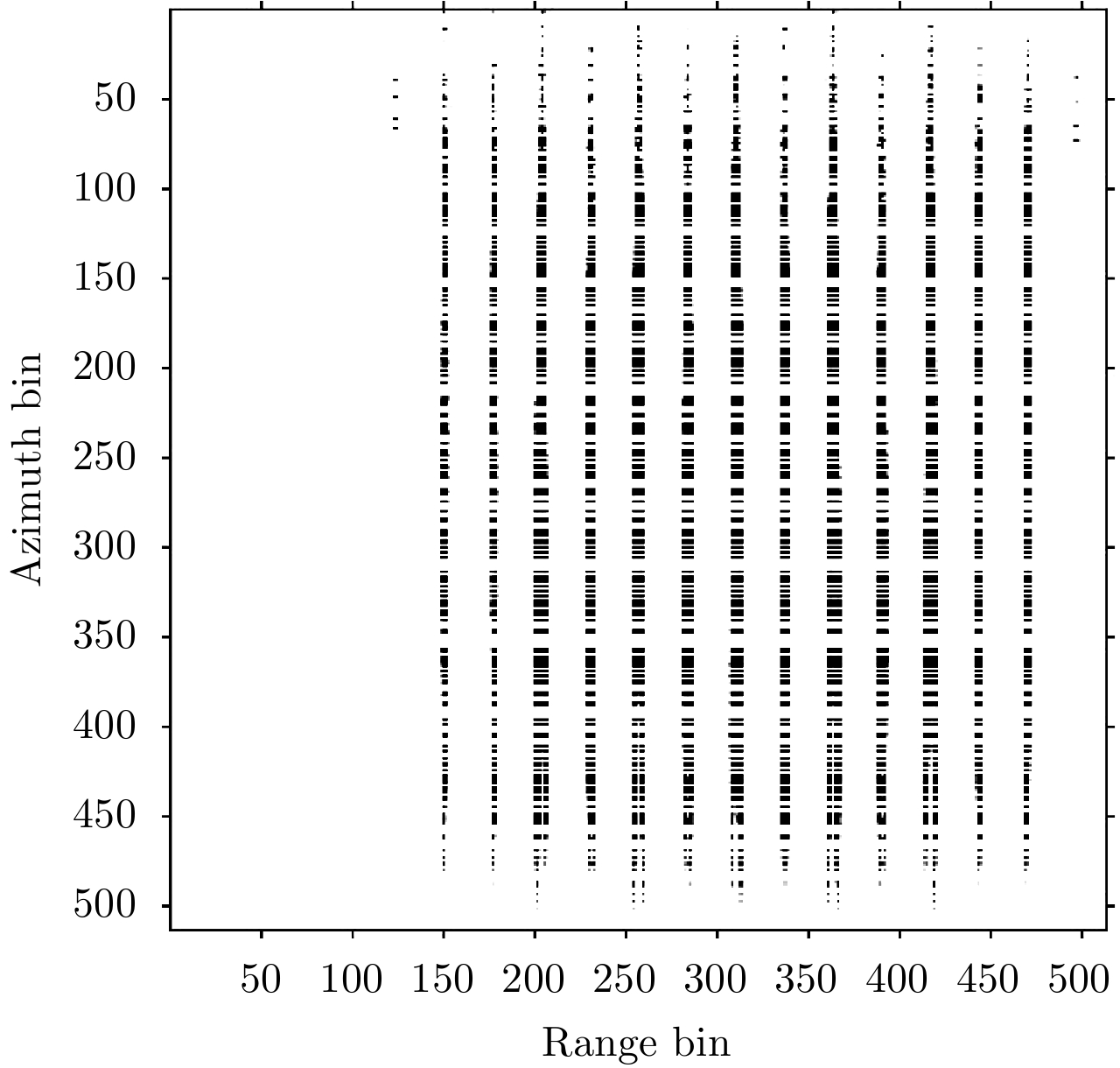
Figure 14. The images of the target with 2/4 sparse aperture data (RMS) by using the OMP algorithm
Table 1. Simulation parameters for the ship with complicated movement
Parameter Value Carrier frequency 10 GHz Pulse width 20 us Imaging time 2 s Band width 400 MHz Amplitude of roll 2.3 ${{π}} $/180 Amplitude of pitch 2.5 ${{π}} $/180 Amplitude of yaw 4.8 ${{π}} $/180 Length of the baseline 2 m Sampling frequency 25.6 MHz Number of the pulse 512 Pulse repetition frequency 256 Hz Angular velocity of roll 2 ${{π}} $/12.2 Angular velocity of pitch 2 ${{π}} $/6.7 Angular velocity of yaw 2 ${{π}} $/14.2  下载: 导出CSV
下载: 导出CSV
-
[1] Wang G Y, Xia X G, and Chen V C. Three-dimensional ISAR imaging of maneuvering targets using three receivers[J]. IEEE Transactions on Image Processing, 2001, 10(3): 436–447. DOI: 10.1109/83.908519 [2] Ma C Z, Yeo T S, Zhang Q, et al. Three-dimensional ISAR imaging based on antenna array[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(2): 504–515. DOI: 10.1109/TGRS.2007.909946 [3] Liu L, Zhou F, Bai X R, et al. Joint cross-range scaling and 3D geometry reconstruction of ISAR targets based on factorization method[J]. IEEE Transactions on Image Processing, 2016, 25(4): 1740–1750. DOI: 10.1109/TIP.2016.2526905 [4] Wang Y and Li X L. Three-dimensional interferometric ISAR imaging for the ship target under the bi-static configuration[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(4): 1505–1520. DOI: 10.1109/JSTARS.2015.2513774 [5] Cao X H, Su F L, Sun H D, et al.. Three-dimensional In-ISAR imaging via the emulated Bistatic radar[C]. Proceedings of the 2nd IEEE Conference on Industrial Electronics and Applications, Harbin, China, 2007: 2826–2830. [6] Ma C Z, Yeo T S, Tan H S, et al. Three-dimensional ISAR imaging using a two-dimensional sparse antenna array[J]. IEEE Geoscience and Remote Sensing Letters, 2008, 5(3): 378–382. DOI: 10.1109/LGRS.2008.916071 [7] Ng B, Tran H T, and An P. Total rotational velocity estimation using 3D interferometrie ISAR with squint geometry[C]. Proceedings of 2016 IEEE Radar Conference, Philadelphia, PA, USA, 2016: 1–6. [8] Tran H T, Giusti E, Martorella M, et al.. Estimation of the total rotational velocity of a non-cooperative target using a 3D InISAR system[C]. Proceedings of 2015 IEEE Radar Conference, Arlington, VA, USA, 2015: 937–941. [9] Martorella M, Stagliano D, Salvetti F, et al. 3D interferometric ISAR imaging of noncooperative targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 3102–3114. DOI: 10.1109/TAES.2014.130210 [10] Lv Q, Su T, Zheng J B, et al. Three-dimensional interferometric inverse synthetic aperture radar imaging of maneuvering target based on the joint cross modified Wigner-Ville distribution[J]. Journal of Applied Remote Sensing, 2016, 10(1): 1–17. [11] Zhang L, Qiao Z J, Xing M D, et al. High-resolution ISAR imaging by exploiting sparse apertures[J]. IEEE Transactions on Antennas and Propagation, 2012, 60(2): 997–1008. DOI: 10.1109/TAP.2011.2173130 [12] Zhong Li-hua, Hu Dong-hui, Ding Chi-biao, et al. ISAR sparse aperture imaging algorithm for large size target[J]. Journal of Radars, 2012, 1(3): 292–300. DOI: 10.3724/SP.J.1300.2012.20033 [13] Pang L N, Zhang S S, Liu C, et al.. CS-based high-resolution ISAR imaging with adaptive sparse basis[C]. Proceedings of 2014 IEEE International Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 2014: 362–365. [14] Bacci A, Staglianó D, Giusti E, et al.. 3D interferometric ISAR via compressive sensing[C]. Proceedings of 2014 11th European Radar Conference, Rome, Italy, 2014: 233–236. [15] Liu Y B, Li N, Wang R, et al. Achieving high-quality three-dimensional InISAR imageries of maneuvering target via super-resolution ISAR imaging by exploiting sparseness[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(4): 828–832. DOI: 10.1109/LGRS.2013.2279402 [16] Chen Q Q, Xu G, Zhang L, et al. Three-dimensional interferometric inverse synthetic aperture radar imaging with limited pulses by exploiting joint sparsity[J]. IET Radar,Sonar&Navigation, 2015, 9(6): 692–701. [17] Xu G, Xing M D, Xia X G, et al. 3D geometry and motion estimations of maneuvering targets for interferometric ISAR with sparse aperture[J]. IEEE Transactions on Image Processing, 2016, 25(5): 2005–2020. DOI: 10.1109/TIP.2016.2535362 [18] Qiu W, Martorella M, Zhou J X, et al. Three-dimensional inverse synthetic aperture radar imaging based on compressive sensing[J]. IET Radar,Sonar&Navigation, 2014, 9(4): 411–420. [19] Zhu D Y, Wang L, Yu Y S, et al. Robust ISAR range alignment via minimizing the entropy of the average range profile[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(2): 204–208. DOI: 10.1109/LGRS.2008.2010562 [20] Zhu D Y, Li Y, Yu X, et al.. Compressed ISAR autofocusing: Experimental results[C]. Proceedings of 2012 IEEE Radar Conference, Atlanta, GA, USA, 2012: 425–430. [21] Wang J, Liu X, and Zhou Z. Minimum-entropy phase adjustment for ISAR[J]. IEE Proceedings-Radar,Sonar and Navigation, 2004, 151(4): 203–209. DOI: 10.1049/ip-rsn:20040692 [22] Wu W Z, Hu P J, Xu S Y, et al. Image registration for InISAR based on joint translational motion compensation[J]. IET Radar,Sonar&Navigation, 2017, 11(10): 1597–1603. [23] Zhu F, Zhang Q, Yan J B, et al.. Compressed sensing in ISAR imaging with sparse sub-aperture[C]. Proceedings of 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011, 2: 1463–1466. [24] Stanković L and Daković M. On a gradient-based algorithm for sparse signal reconstruction in the signal/measurements domain[J]. Mathematical Problems in Engineering, 2016, 2016: 6212674. [25] Wang Y. Radar imaging of non-uniformly rotating targets via a novel approach for multi-component AM-FM signal parameter estimation[J]. Sensors, 2015, 15(3): 6905–6923. DOI: 10.3390/s150306905 [26] Fornaro G, Franceschetti G, and Lanari R. Interferometric SAR phase unwrapping using Green’s formulation[J].IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(3): 720–727. DOI: 10.1109/36.499751 [27] Li Fang-fang, Zhan Yi, Hu Dong-hui, et al. A fast method for InSAR phase unwrapping based on quality guide[J]. Journal of Radars, 2012, 1(2): 196–202. DOI: 10.3724/SP.J.1300.2012.20023 [28] Li N, Wang L, and Zhu D Y. Optimal ISAR imaging time selection of ship targets using real data[C]. Proceedings of IET International Radar Conference 2013, Xi’an, China, 2013: 1–4. [29] Wang Y and Jiang Y C. ISAR imaging of a ship target using product high-order matched-phase transform[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(4): 658–661. DOI: 10.1109/LGRS.2009.2013876 [30] Wang Y and Jiang Y C. New approach for ISAR imaging of ship target with 3D rotation[J]. Multidimensional Systems and Signal Processing, 2010, 21(4): 301–318. DOI: 10.1007/s11045-010-0111-6 [31] Li Y N, Fu Y W, Li X, et al.. An ISAR imaging method for multiple moving targets based on fractional Fourier transformation[C]. Proceedings of 2009 IEEE Radar Conference, Pasadena, CA, USA, 2009: 1–6. [32] Yamamoto K, Iwamoto M, and Kirimoto T. A new algorithm to calculate the reference image of ship targets for ATR using ISAR[C]. Proceedings of MTS/IEEE Conference and Exhibition OCEANS 2001, Honolulu, HI, USA, 2001, 4: 2601–2607. -







图(16) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

