
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Ship Detection in GF-3 NSC Mode SAR Images
-
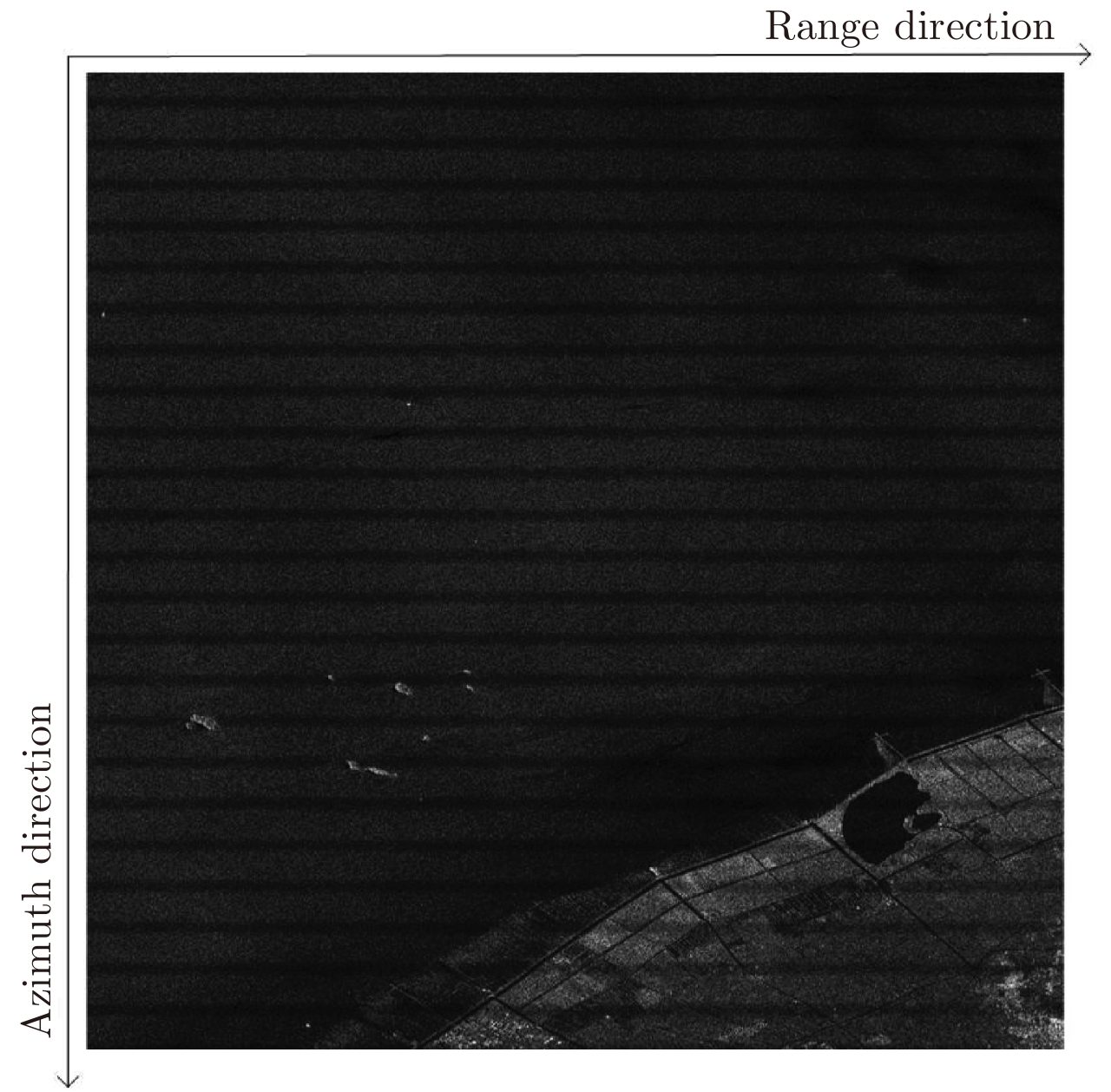
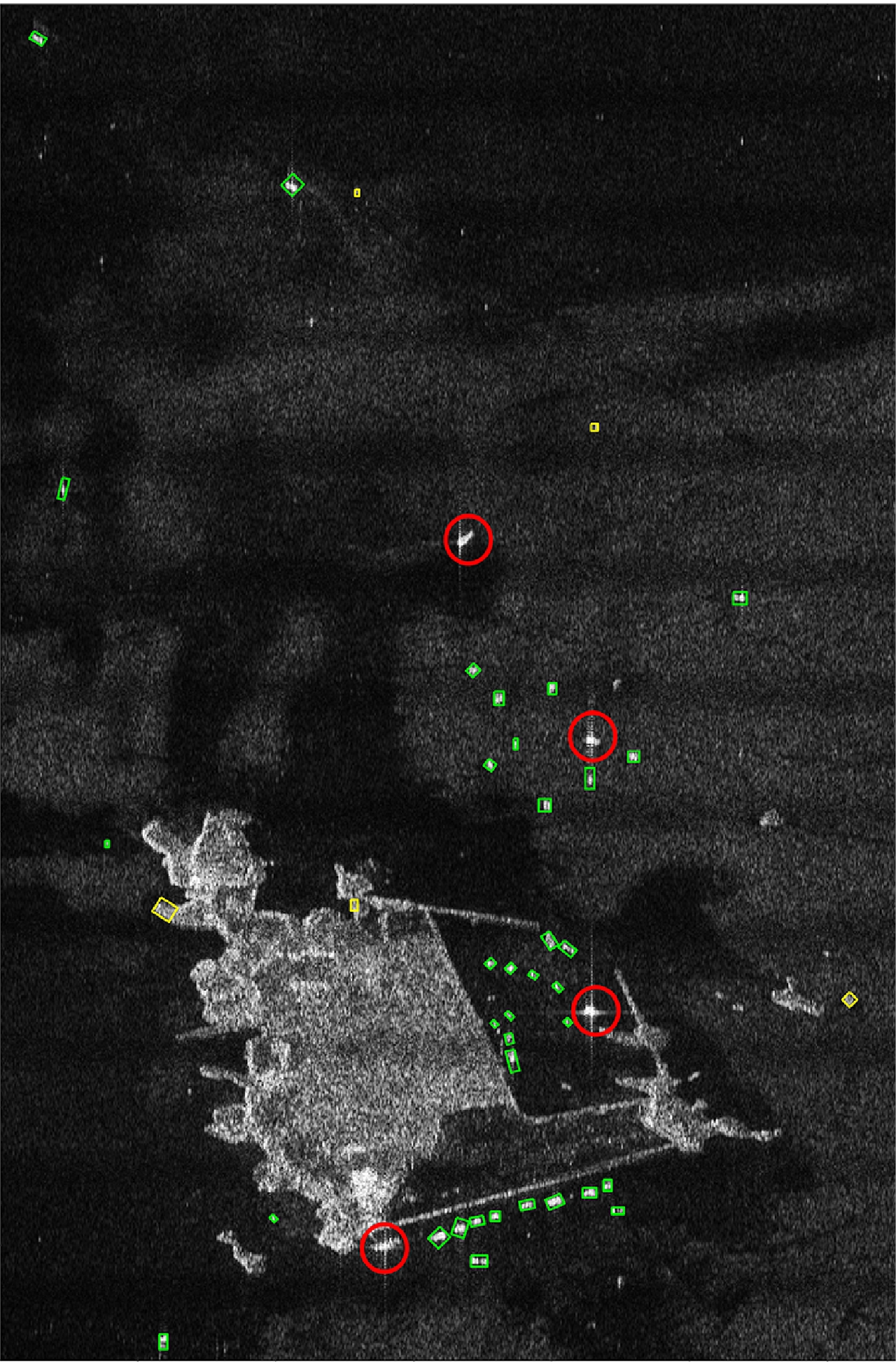
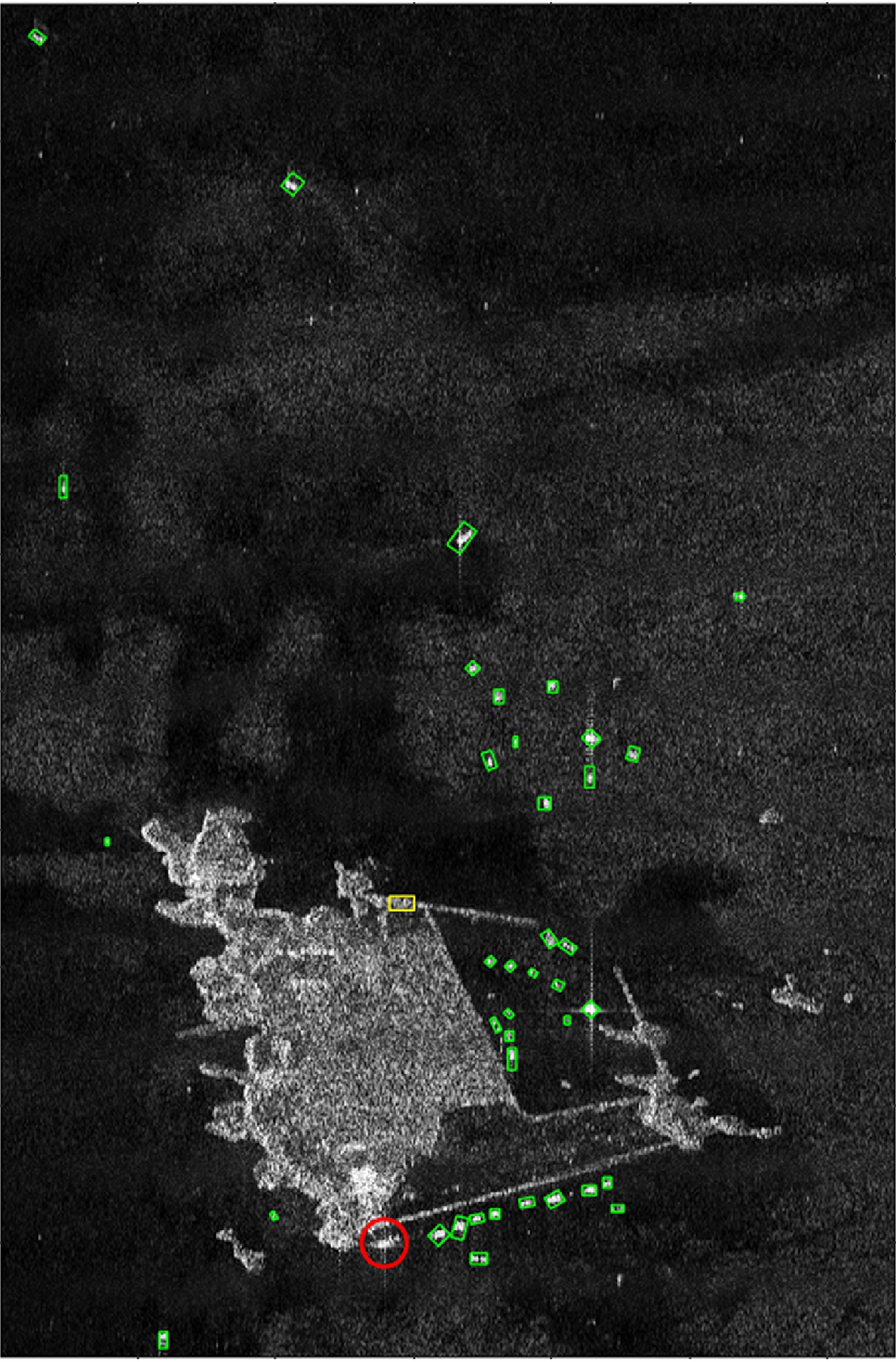
摘要: 高分三号卫星是我国首颗分辨率达到1m的C波段多极化合成孔径雷达(Synthetic Aperture Radar, SAR)卫星,拥有多种成像模式。该文针对高分三号NSC模式SAR图像提出一种海上舰船目标检测方法,其核心为基于贝叶斯框架的像素分类以实现目标筛选,并根据数据特点设计有效的图像降质条件下的性能提升方法。该文提出的检测算法与多种恒虚警率(Constant False Alarm Rate, CFAR)检测算法进行对比实验分析,实验结果证明了该文所提方法的有效性与性能优势。Abstract: GF-3, the first C-band full-polarimetric Synthetic Aperture Radar (SAR) satellite with a space resolution up to 1 m, has multiple strip and scan imaging modes. In this paper, we propose a maritime ship detection algorithm that detects ship targets via pixel classification in a Bayesian framework and employ effective enhancement methods to improve detection performance based on the data characteristics. We compare and analyze the results of detection experiments using the proposed algorithm with those of several Constant False Alarm Rate (CFAR) algorithms. The experimental results verify the effectiveness of the proposed algorithm.
-
Key words:
- GF-3 satellite /
- Synthetic Aperture Radar (SAR) /
- Ship detection /
- Pixel classification
-

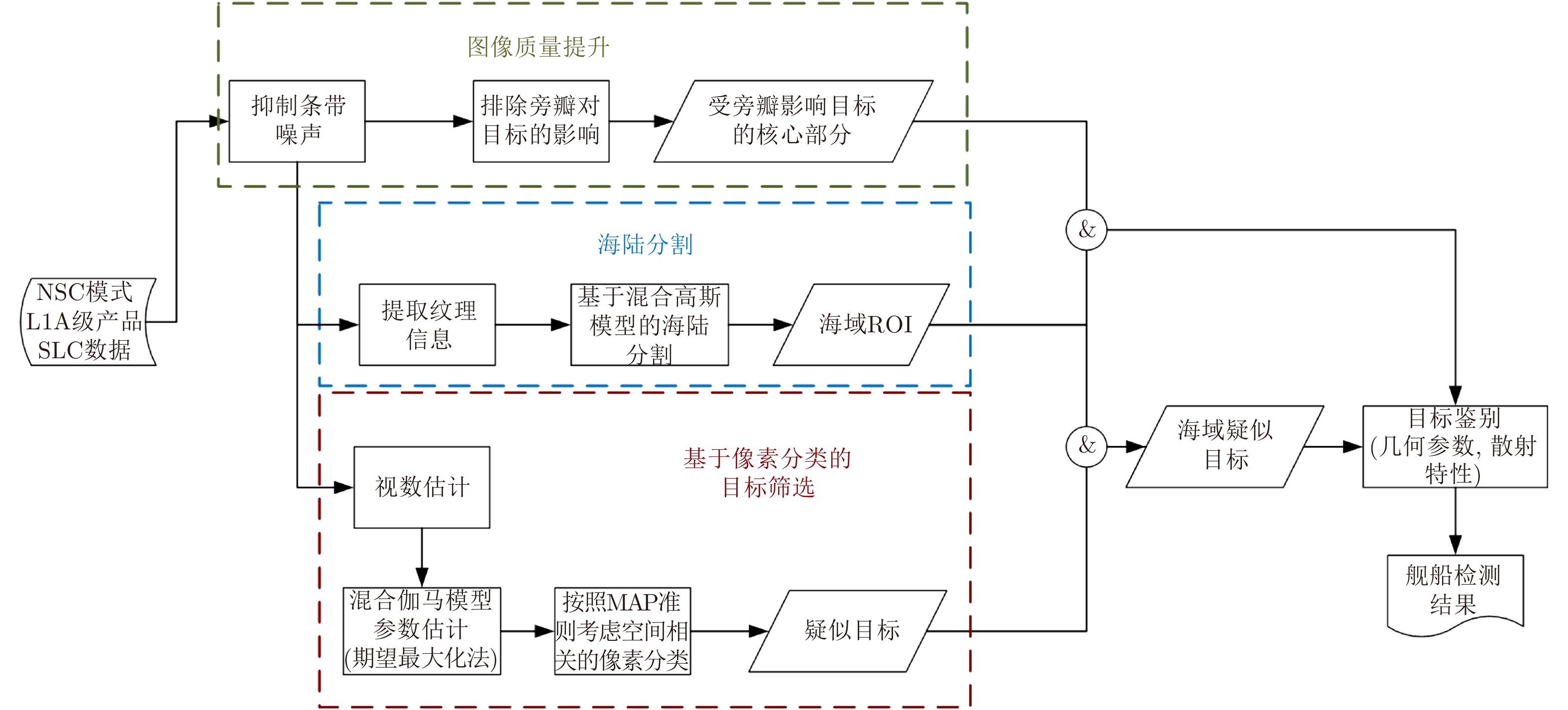
图 1 高分三号NSC模式L1A级产品海面舰船检测全流程
Figure 1. Flow chart of maritime ship detection on GF3 NSC imaging mode, L1A product

图 4 改进滤波器和提取受旁瓣影响的舰船目标核心部分示意图
Figure 4. Modified filter and extraction result of ship target core region after region growing based on center region of sidelobes
表 1 高分三号NSC模式SAR图像舰船检测指标统计
Table 1. GF-3 satellite NSC mode SAR image maritime ship detection results
图像质量提升处理情况 检测方法 真值数 检测数 正确检测数 Precision (%) Recall (%) 经过质量提升 G0-CFAR 111 112 96 85.714 86.486 K-CFAR 111 118 98 83.051 88.288 GΓD-CFAR 111 115 99 86.087 89.189 本文检测方法 111 112 107 95.536 96.396 未经质量提升 G0-CFAR 111 101 85 84.158 76.577 K-CFAR 111 107 88 82.243 79.279 GΓD-CFAR 111 105 89 84.762 80.180 本文检测方法 111 105 92 87.619 82.883  下载: 导出CSV
下载: 导出CSV
-
[1] 张庆君. 高分三号卫星总体设计与关键技术[J]. 测绘学报, 2017, 46(3): 269–277. doi: 10.11947/j.AGCS.2017.20170049Zhang Qingjun. System design and key technologies of the GF-3 satellite[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(3): 269–277. doi: 10.11947/j.AGCS.2017.20170049 [2] 丁赤飚, 刘佳音, 雷斌, 等. 高分三号SAR卫星系统级几何定位精度初探[J]. 雷达学报, 2017, 6(1): 11–16. http://radars.ie.ac.cn/CN/abstract/abstract415.shtmlDing Chibiao, Liu Jiayin, Lei Bin, et al.. Preliminary exploration of systematic geolocation accuracy of GF-3 SAR satellite system[J]. Journal of Radars, 2017, 6(1): 11–16. http://radars.ie.ac.cn/CN/abstract/abstract415.shtml [3] 杨劲松, 任林, 王隽. 高分三号卫星对海浪的首次定量遥感[J]. 海洋与湖沼, 2017, 48(2): 207–209. http://www.cnki.com.cn/Article/CJFDTOTAL-HYFZ201702001.htmYang Jingsong, Ren Lin, and Wang Juan. The first quantitative remote sensing of ocean surface waves by Chinese GF-3 SAR satellite[J]. Oceanologia et Limnologia Sinica, 2017, 48(2): 207–209. http://www.cnki.com.cn/Article/CJFDTOTAL-HYFZ201702001.htm [4] 王文煜, 谢春华, 袁新哲, 等. 高分三号卫星ATI模式海表面流场测量性能分析[J]. 航天器工程, 2017, 26(1): 132–139. http://www.cnki.com.cn/Article/CJFDTOTAL-HTGC201701021.htmWang Wen-yu, Xie Chun-hua, Yuan Xin-zhe, et al.. Performance analysis of sea surface current measurements by GF-3 satellite ATI mode[J]. Spacecraft Engineering, 2017, 26(1): 132–139. http://www.cnki.com.cn/Article/CJFDTOTAL-HTGC201701021.htm [5] 杨劲松, 王隽, 任林. 高分三号卫星对海洋内波的首次定量遥感[J]. 海洋学报, 2017, 39(1): 148. http://www.cnki.com.cn/Article/CJFDTOTAL-SEAC201701016.htmYang Jing-song, Wang Juan, and Ren Lin. The first quantitative remote sensing of ocean internal wave By Chinese GF-3 SAR satellite[J]. Haiyang Xuebao, 2017, 39(1): 148. (未找到本条文献英文信息, 请核对) http://www.cnki.com.cn/Article/CJFDTOTAL-SEAC201701016.htm [6] Li Hengchao, Hong Wen, Wu Yirong, et al.. On the empirical-statistical modeling of SAR images with generalized gamma distribution[J]. IEEE Journal of Selected Topics in Signal Processing, 2011, 5(3): 386–397. doi: 10.1109/JSTSP.2011.2138675 [7] Ni Weiping, Yan Weidong, Wu Junzheng, et al.. Statistical analysis and modeling of TerraSAR-X images for CFAR based target detection[C]. Proceedings of 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, VIC, Australia, 2013: 1983–1986. [8] 高贵, 周蝶飞, 蒋咏梅, 等. SAR图像目标检测研究综述[J]. 信号处理, 2008, 24(6): 971–981. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200806019.htmGao Gui, Zhou Diefei, Jiang Yongmei, et al.. Study on target detection in SAR image: A survey[J]. Signal Processing, 2008, 24(6): 971–981. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200806019.htm [9] 艾加秋, 齐向阳. 一种基于局部K-分布的新的SAR图像舰船检测算法[J]. 中国科学院研究生院学报, 2010, 27(1): 36–42. http://youxian.cnki.com.cn/yxdetail.aspx?filename=LDAX20170818000&dbname=CAPJ2015Ai Jiaqiu and Qi Xiangyang. A new ship detection algorithm based on local K-distribution in SAR images[J]. Journal of the Graduate School of the Chinese Academy of Sciences, 2010, 27(1): 36–42. http://youxian.cnki.com.cn/yxdetail.aspx?filename=LDAX20170818000&dbname=CAPJ2015 [10] Qin Xianxiang, Zhou Shilin, Zou Huanxin, et al.. A CFAR detection algorithm for generalized gamma distributed background in high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(4): 806–810. doi: 10.1109/LGRS.2012.2224317 [11] Gao Gui, Ouyang Kewei, Luo Yongbo, et al.. Scheme of parameter estimation for generalized gamma distribution and its application to ship detection in SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(3): 1812–1832. doi: 10.1109/TGRS.2016.2634862 [12] 艾加秋, 齐向阳, 禹卫东. 改进的SAR图像双参数CFAR舰船检测算法[J]. 电子与信息学报, 2009, 31(12): 2881–2885. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200912019.htmAi Jiaqiu, Qi Xiangyang, and Yu Weidong. Improved two parameter CFAR ship detection algorithm in SAR images[J] Journal of Electronics & Information Technology, 2009, 31(12): 2881–2885. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200912019.htm [13] 种劲松, 朱敏慧. SAR图像局部窗口K-分布目标检测算法[J]. 电子与信息学报, 2003, 25(9): 1276–1280. http://youxian.cnki.com.cn/yxdetail.aspx?filename=LDAX20170818000&dbname=CAPJ2015Chong Jinsong and Zhu Minhui. Target detection algorithm of SAR image based on local window K-distribution[J]. Journal of Electronics and Information Technology, 2003, 25(9): 1276–1280. http://youxian.cnki.com.cn/yxdetail.aspx?filename=LDAX20170818000&dbname=CAPJ2015 [14] Akyılmaz E, Demirkesen C, Nar F, et al.. Interactive ship segmentation in SAR images[C]. Proceedings of the 2013 21st Signal Processing and Communications Applications Conference (SIU), Haspolat, 2013: 1–4. [15] Wang Shigang, Wang Min, Yang Shuyuan, et al.. New hierarchical saliency filtering for fast ship detection in high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(1): 351–362. doi: 10.1109/TGRS.2016.2606481 [16] Zhai Liang, Li Yu, and Su Yi. Inshore ship detection via saliency and context information in high-resolution SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1870–1874. doi: 10.1109/LGRS.2016.2616187 [17] Zhao J, Guo W, Liu B, et al.. Ship detection for sentinel-1 SAR imagery based on a coupled convolutional neural network[J]. IEEE Geoscience and Remote Sensing Letters, submitted for reviewing. [18] Otsu N. A threshold selection method from gray-level histograms[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1979, 9(1): 62–66. doi: 10.1109/TSMC.1979.4310076 [19] Duda R O and Hart P E. Use of the Hough transformation to detect lines and curves in pictures[J]. Communications of the ACM, 1972, 15(1): 11–15. doi: 10.1145/361237.361242 [20] Tupin F, Maitre H, Mangin J F, et al.. Detection of linear features in SAR images: Application to road network extraction[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(2): 434–453. doi: 10.1109/36.662728 [21] Goodman J W. Some fundamental properties of speckle[J]. Journal of the Optical Society of America, 1976, 66(11): 1145–1150. doi: 10.1364/JOSA.66.001145 [22] Dempster A P, Laird N M, and Rubin D B. Maximum likelihood from incomplete data via the EM algorithm[J]. Journal of the Royal Statistical Society. Series B (Methodological), 1977, 39(1): 1–38. [23] Wu Yonghui, Ji Kefeng, Yu Wenxian, et al.. Region-based classification of polarimetric SAR images using wishart MRF[J]. IEEE Geoscience and Remote Sensing Letters, 2008, 5(4): 668–672. doi: 10.1109/LGRS.2008.2002263 [24] 吴永辉. 极化SAR图像分类技术研究[D]. [博士论文], 国防科学技术大学, 2007: 117–121.Wu Yonghui. Classification of polarimetric SAR images[D]. [Ph.D. dissertation], National University of Defense Technology, 2007: 117–121. [25] 曹峰, 邢相薇, 计科峰. 一种SAR图像舰船目标快速检测方法[J]. 雷达科学与技术, 2012, 10(4): 380–386. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201204006.htmCao Feng, Xing Xiangwei, and Ji Kefeng. A fast method for ship detection in SAR imagery[J]. Radar Science and Technology, 2012, 10(4): 380–386. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201204006.htm -



图(6) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

