
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Study of Wide Swath Synthetic Aperture Ladar Imaging Techology
-
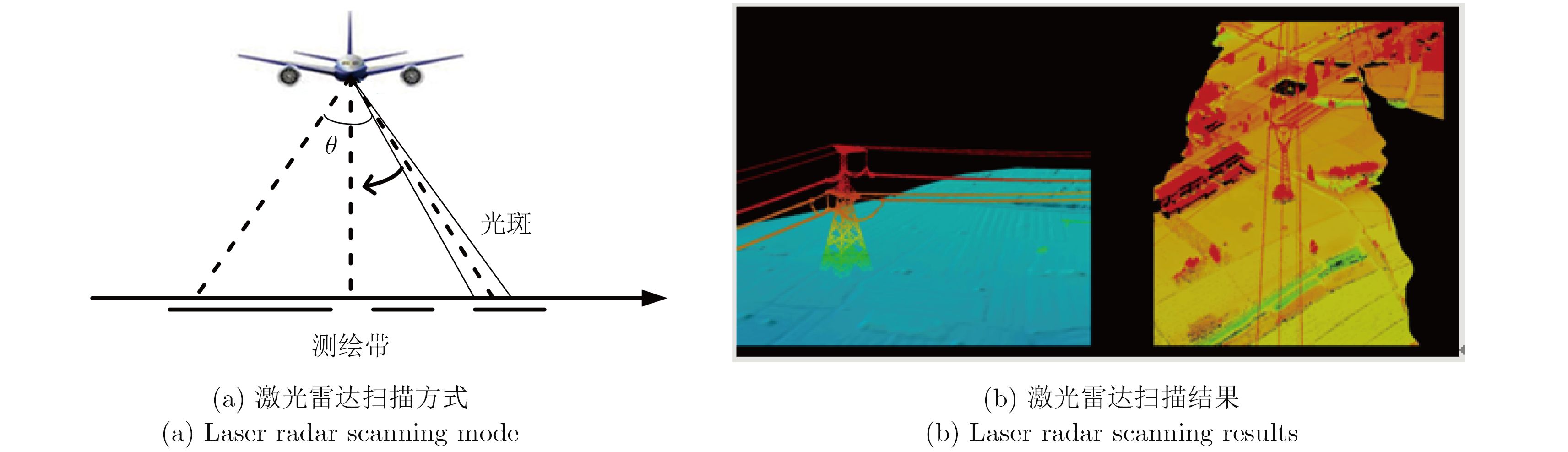
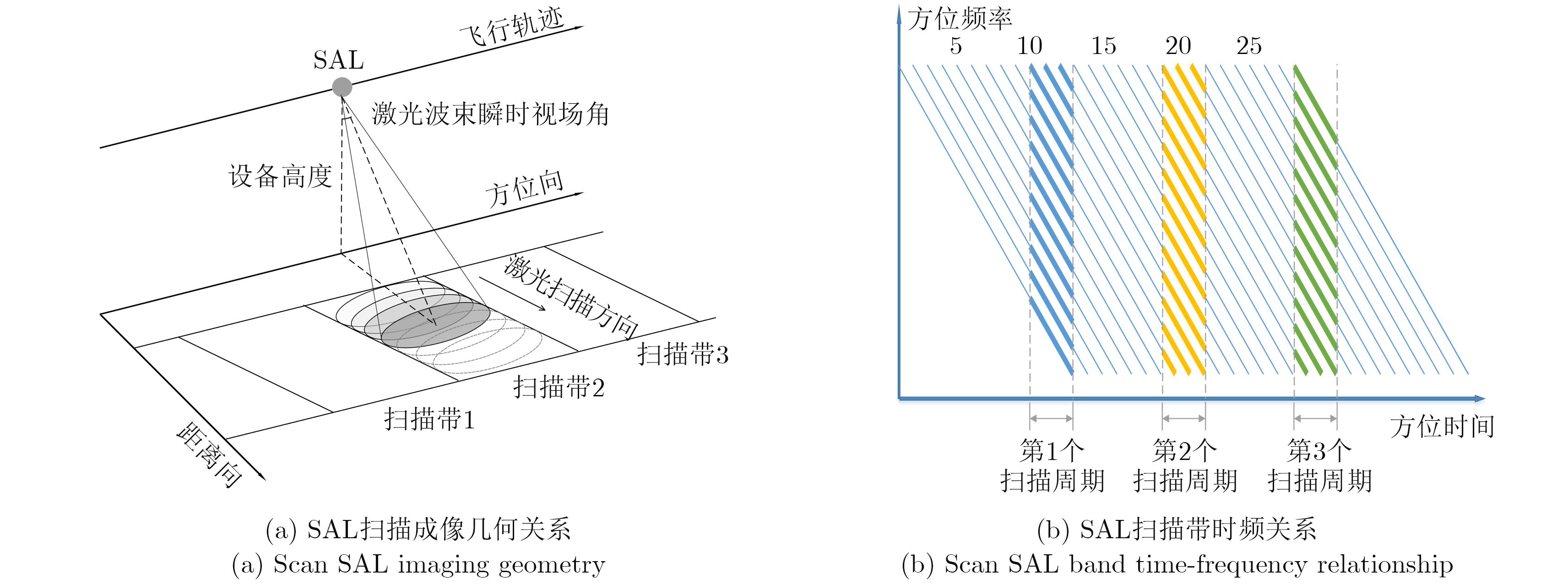
摘要: 激光合成孔径雷达(SAL)结合了光相干探测技术和合成孔径成像技术,其微弱信号检测能力达到光子量级、成像分辨率可以突破望远镜衍射孔径极限,可以获得高分辨率图像而不受探测距离影响。针对SAL系统在成像幅宽方面的技术短板,在介绍激光合成孔径雷达与扫描成像激光雷达(LiDAR)各自发展阶段和技术特点的基础上,该文提出合成孔径技术与激光扫描技术相结合,在实现高分辨率成像同时突破SAL技术的成像幅宽限制。通过对扫描模式下SAL信号模型分析、机载SAL外场飞行成像实验和地面目标合成孔径成图计算,该文展示了SAL在远程、高分辨率和扫描成像中的应用潜力,提出了弥补现有SAL技术在成像幅宽和作业效率方面的缺憾的方法,为SAL系统在大幅宽、高分辨率对地观测以及空天弱目标ISAL成像提供了科学技术手段。Abstract: Combining synthetic-aperture imaging and coherent-light detection technology, the weak signal identification capacity of Synthetic Aperture Ladar (SAL) reaches the photo level, and the image resolution exceeds the diffraction limit of the telescope to obtain high-resolution images irrespective to ranges. This paper introduces SAL, including the development path, technology characteristics, and the restriction of imaging swath. On the basis of this, we propose to integrate the SAL technology for extending its swath. By analyzing the scanning-operation mode and the signal model, the paper explicitly proposes that the former mode will be the developmental trend of the SAL technology. This paper also introduces the flight demonstrations of the SAL and the imaging results of remote targets, showing the potential of the SAL in long-range, high-resolution, and scanning-imaging applications. The technology and the theory of the scanning mode of SAL compensates for the defects related to the swath and operation efficiency of the current SAL. It provides scientific foundation for the SAL system applied in wide swath, high resolution earth observation, and the ISAL system applied in space-targets imaging.
-
Key words:
- Synthetic Aperture Ladar (SAL) /
- Laser radar /
- Scanning mode
-

图 1 洛克希德马丁公司SAL飞行成像结果
Figure 1. Lockheed Martin Corporation SAL flight demonstration images

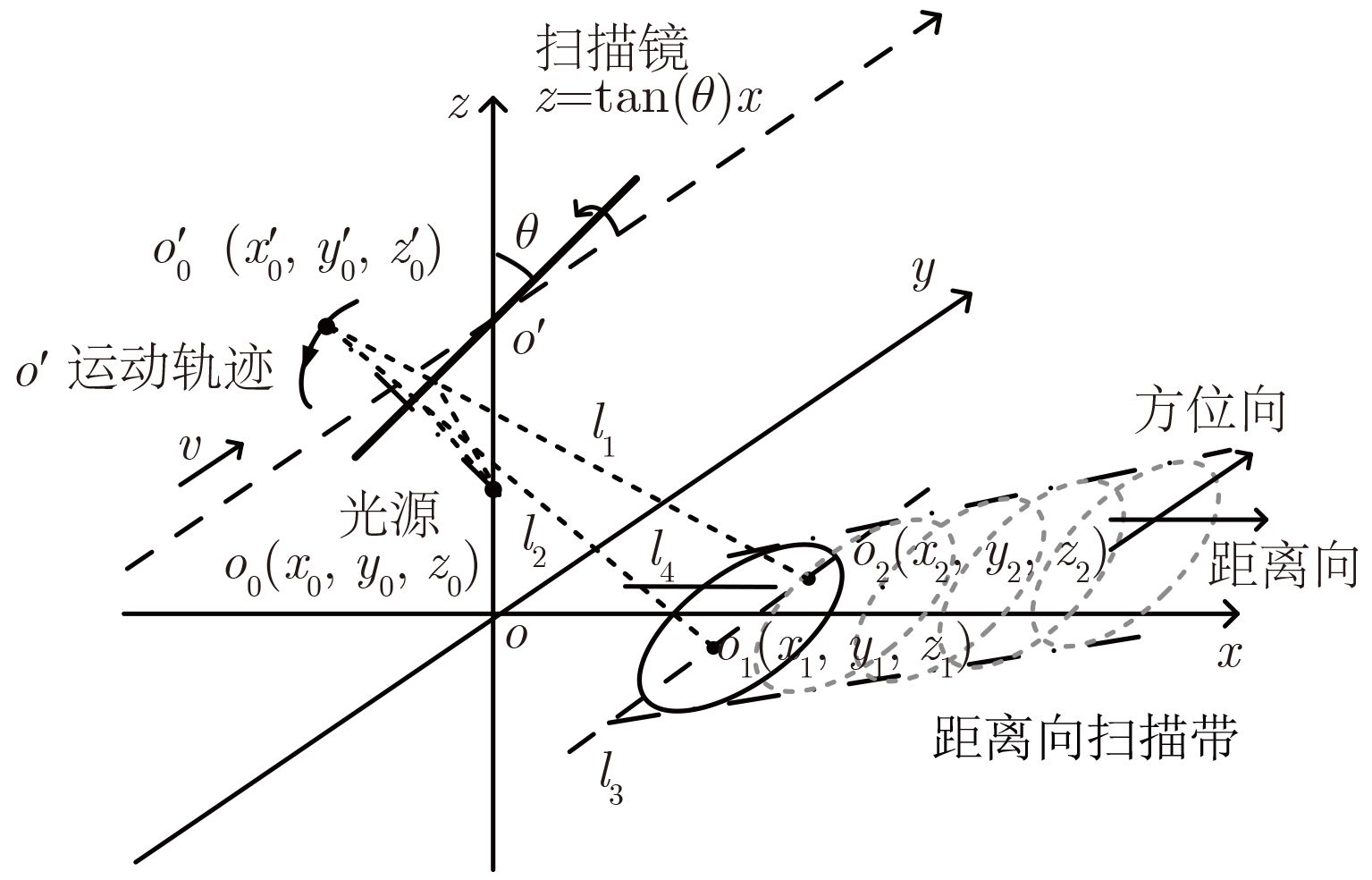
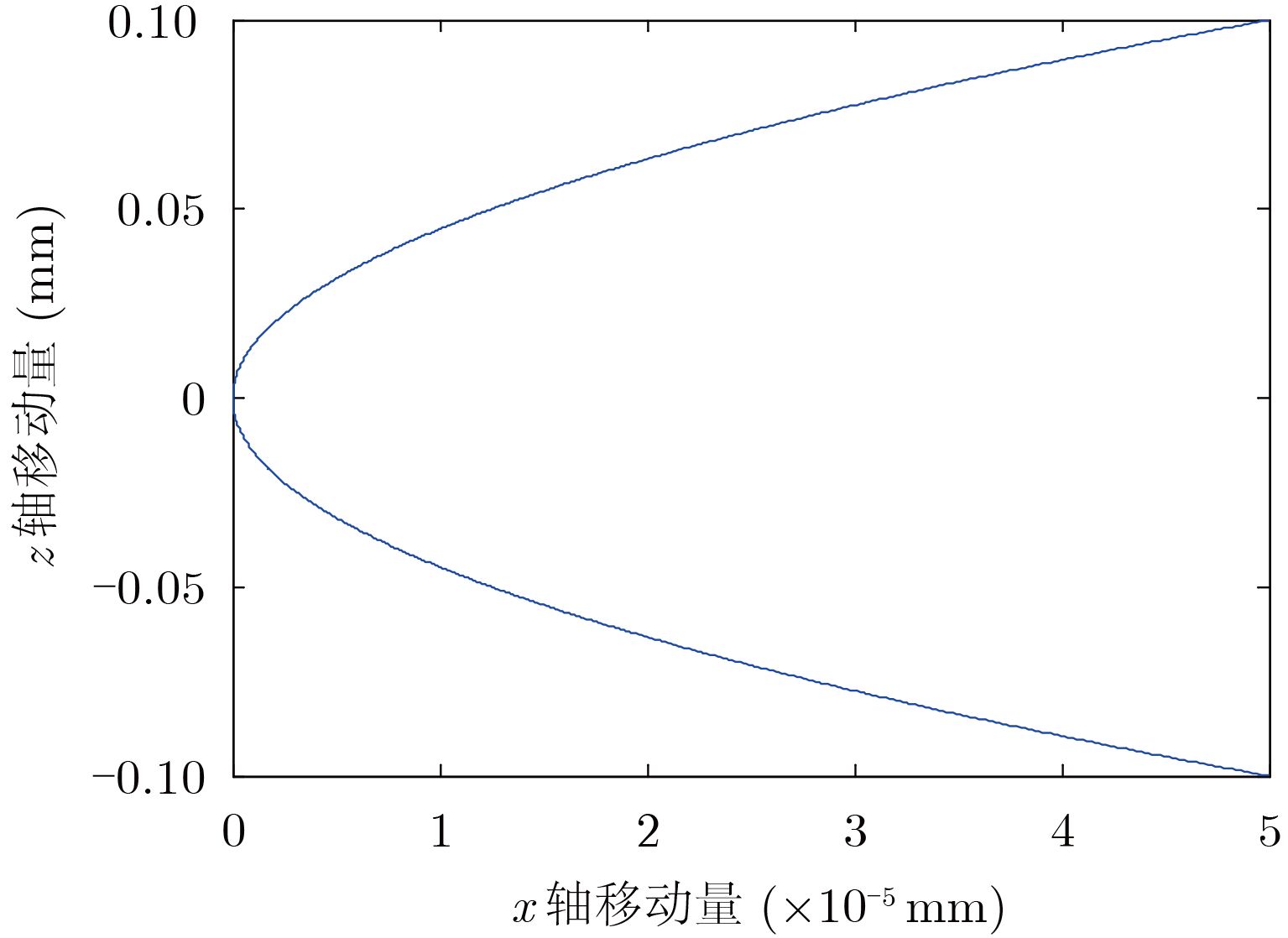
图 5 扫描过程中镜像点 $o\,_0^\prime$运动轨迹
Figure 5. The orbit of $o\,_0^\prime$ in the scanning process

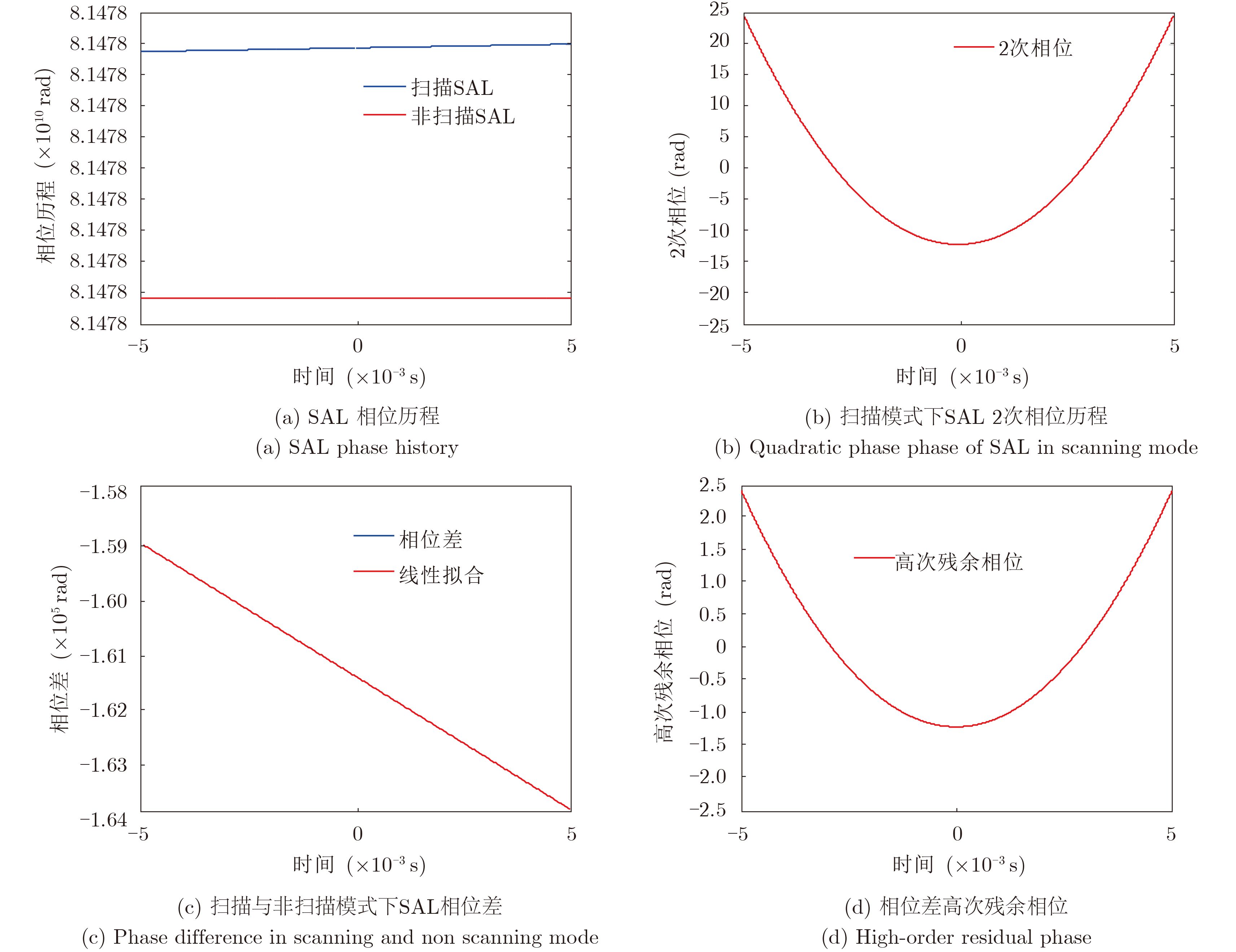
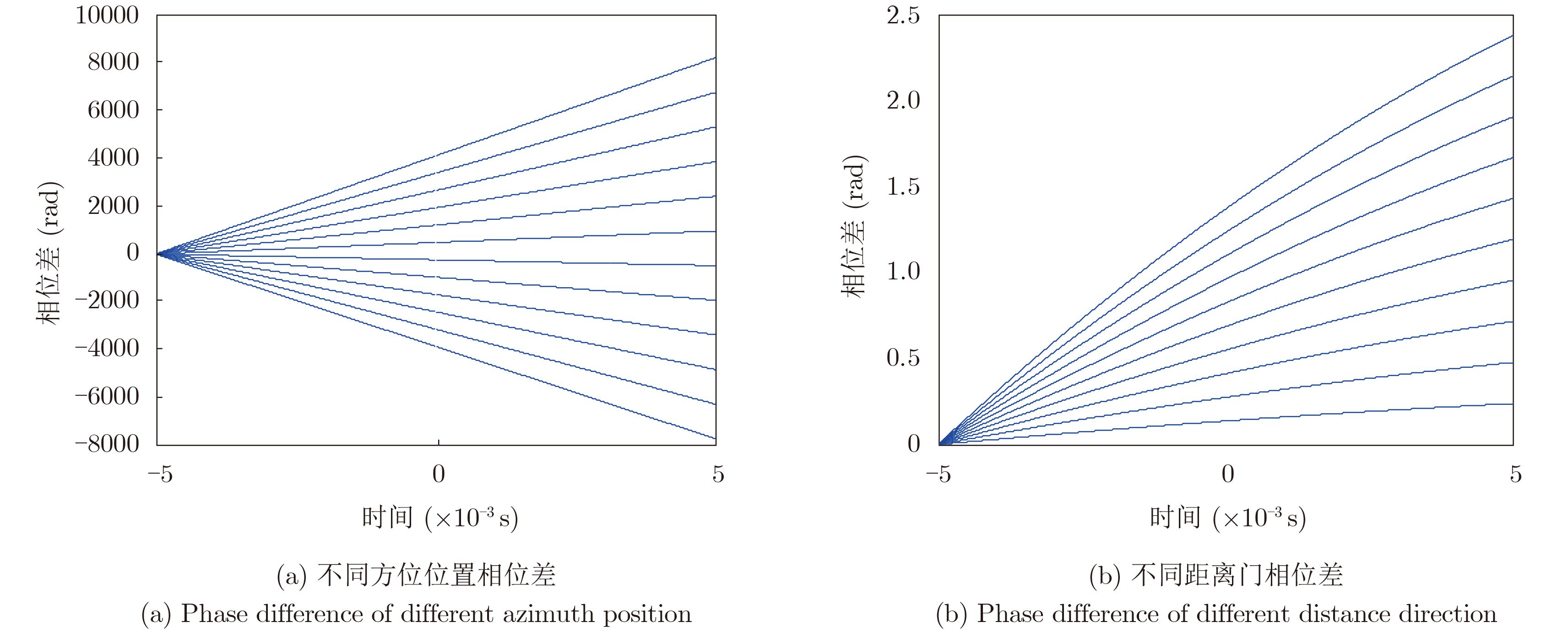
图 6 扫描与非扫描模式下SAL运动相位分析
Figure 6. Phase analysis of SAL in non scanning mode and scanning mode

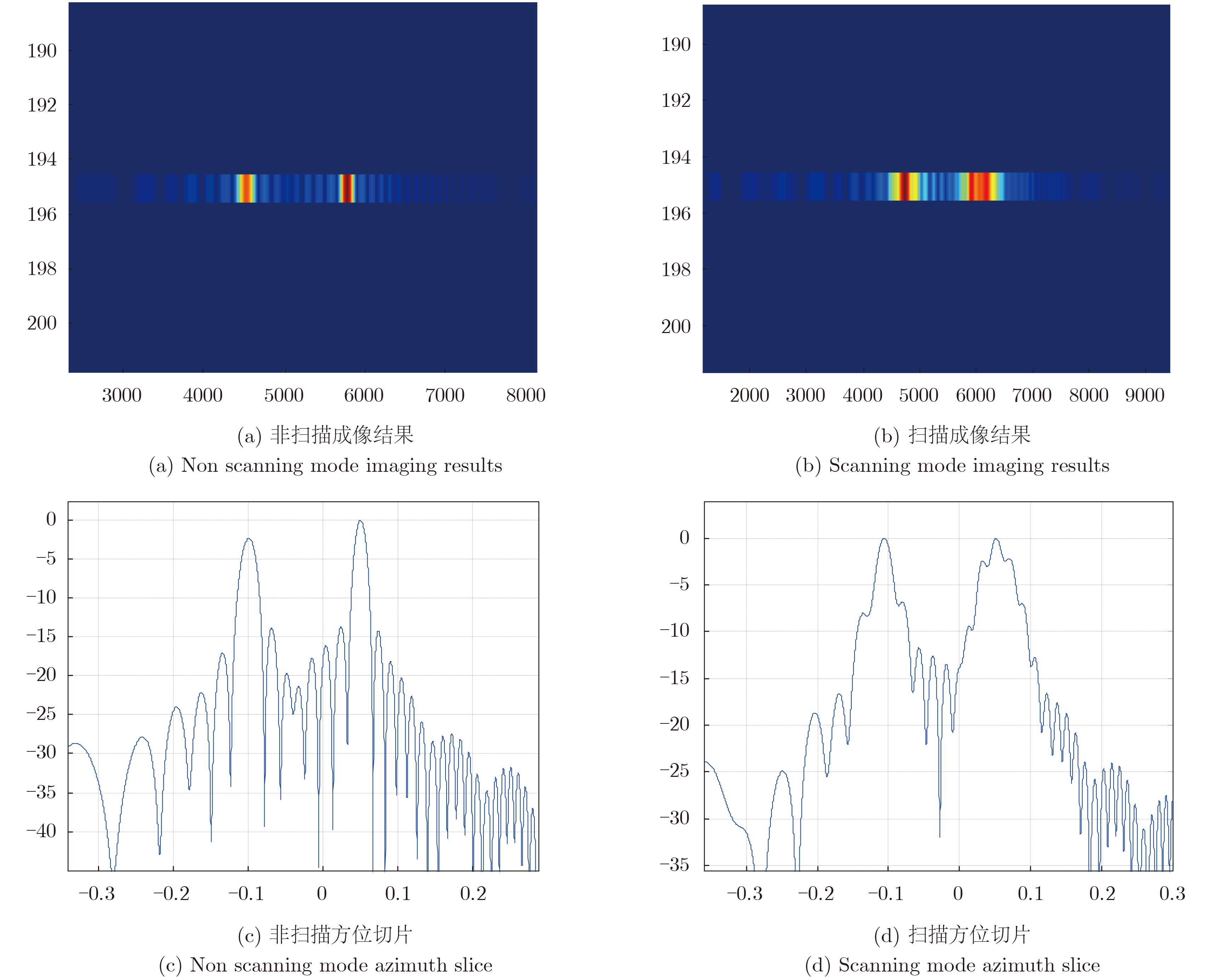
图 8 非扫描模式与扫描模式下SAL方位向成像仿真
Figure 8. SAL simulation in non scanning mode and scanning mode

图 9 扫描模式下SAL方位分辨率与扫描视场关系
Figure 9. Relationship between azimuth resolution and scanning field in scanning mode
表 1 扫描模式下SAL运动参数
Table 1. SAL motion parameters in scanning mode
参数 数值 距离 10 km 飞行速度 100 m/s 扫描速度 0.5 rad/s 发散角 1 mrad 带宽 3.8 GHz 采样频率 250 MHz 重频 150 kHz  下载: 导出CSV
下载: 导出CSV
表 2 不同距离下机载SAL成像分辨率
Table 2. Imaging resolution at different distances
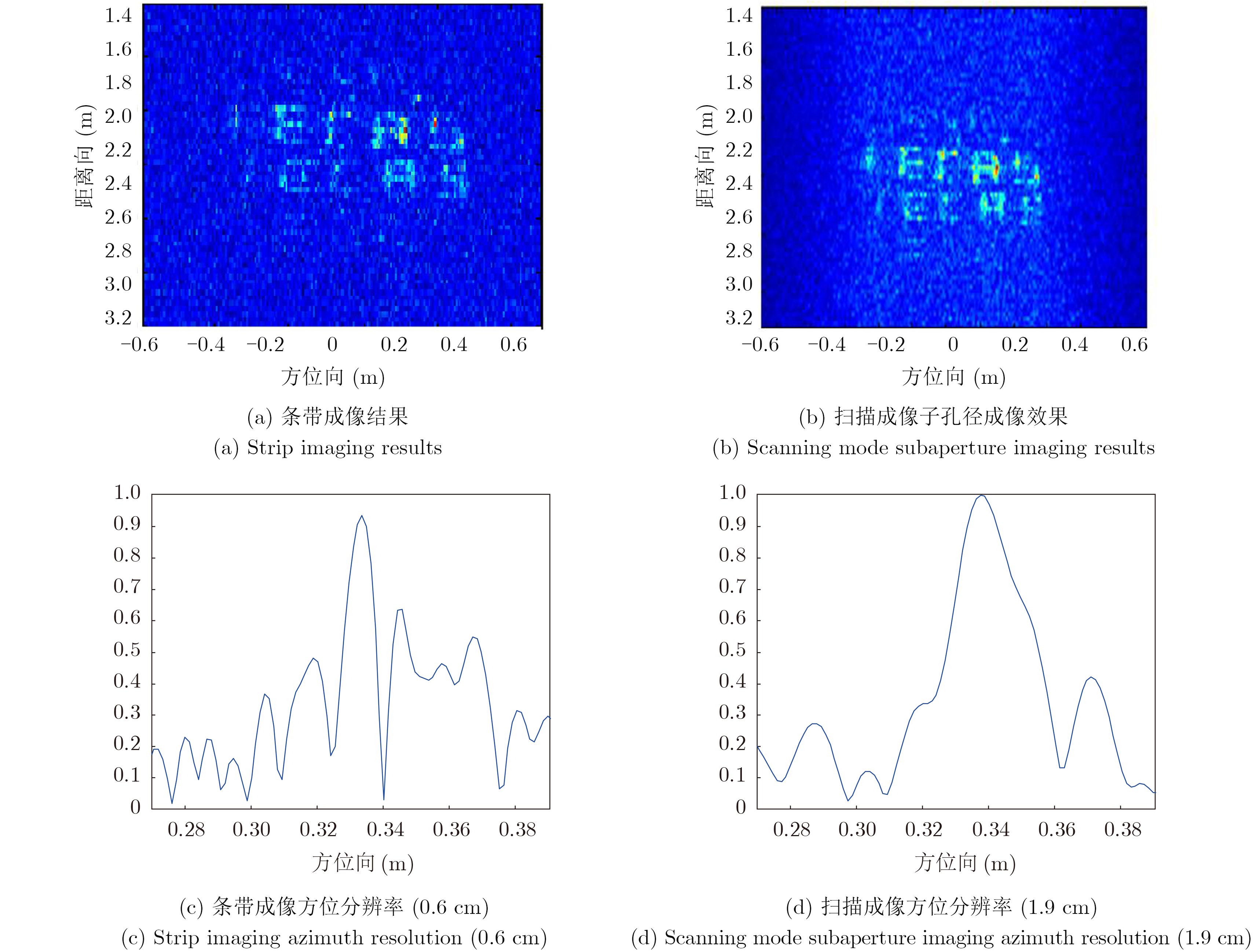
成像距离(km) 扫描子孔径方位向 分辨率(cm) 全孔径方位向 分辨率(cm) 距离向 分辨率(cm) 1 2.2 0.5 6.1 2 1.9 0.6 6.0 3 1.9 0.6 6.0
下载: 导出CSV
-
[1] Lewis T S and Hutchins H S. A synthetic aperture at optical frequencies[J].Proceedings of the IEEE, 1970, 58(4): 578–588. https://www.researchgate.net/publication/2992085_A_synthetic_aperture_at_optical_frequencies [2] Bashkansky M, Lucke R L, Funk E,et al.. Two-dimensional synthetic aperture imaging in the optical domain[J].Optics Letters, 2002, 27(22): 1983–1985. doi: 10.1364/OL.27.001983 [3] Beck S M, Buck J R, Buell W F,et al.. Synthetic aperture imaging ladar: Laboratory demonstration and signal processing[J].Applied Optics, 2005, 44(35): 7621–7629. doi: 10.1364/AO.44.007621 [4] Dierking M, Schumm B, Ricklin J C,et al.. Synthetic aperture LADAR for tactical imaging overview[C]. The 14th Coherent Laser Radar Conference (CLRC), 2007, Session 9. [5] Krause B W, Buck J, Ryan C,et al.. Synthetic aperture ladar flight demonstration[C]. Lasers and Electro-Optics (CLEO), 2011. [6] http://www.globalsecurity.org/space/systems/long-view. htm [7] 郭亮, 邢孟道, 张龙, 等. 室内距离向合成孔径激光雷达成像的实验研究[J]. 中国科学E辑: 技术科学, 2009, 39(10): 1678–1684. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK200910009.htmGuo Liang, Xing Meng-dao, Zhang Long,et al.. Research on indoor experimentation of rangeSAL imaging system[J].Science in China Series E:Technological Sciences, 2009, 52(10):3098–3104. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK200910009.htm [8] 刘立人, 周煜, 职亚楠, 等. 大口径合成孔径激光成像雷达演示样机及其实验验证[J]. 光学学报, 2011, 31(9): 112–116. http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201109016.htmLiu Li-ren, Zhou Yu, Zhi Ya-nan,et al.. A large-aperture synthetic aperture imaging ladardemonstrator and its verification in laboratory space[J].Acta Optica Sinica, 2011, 31(9): 112–116. http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201109016.htm [9] Luan Zhu, Sun Jian-feng, Zhou Yu,et al.. Down-looking synthetic aperture imaging ladardemonstrator and its experiments over 1.2 km outdoor[J].Chinese Optics Letters, 2014,12(11): 45–48. https://www.researchgate.net/publication/267760278_Down-looking_synthetic_aperture_imaging_ladar_demonstrator_and_its_experiments_over_12_km_outdoor [10] Wu Jin, Li Fei-fei, Zhao Zhi-long,et al.. Demonstration of stripmap mode synthetic apertureladar with PGA-independent high resolution images[J].Infrares and Laser Engineering, 2014,43(11): 3559–3564. [11] 李然, 王成, 苏国中, 等. 星载激光雷达的发展与应用[J]. 科技导报, 2007, 25(14): 58–63. http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB200714019.htmLi Ran, Wang Cheng, Su Guo-zhong,et al.. Development and applications of spaceborneLiDAR[J].Science &Technology Review, 2007, 25(14): 58–63. http://www.cnki.com.cn/Article/CJFDTOTAL-KJDB200714019.htm [12] 李田泽. 激光扫描成像系统的设计分析及应用[J]. 红外技术, 2004, 26(4): 16–19. http://www.cnki.com.cn/Article/CJFDTOTAL-HWJS200404003.htmLi Tian-ze. Application and design analysis of imagery system of laser scanning[J].InfraredTechnology, 2004, 26(4): 16–19. http://www.cnki.com.cn/Article/CJFDTOTAL-HWJS200404003.htm [13] Wahl D E, Eichel P H, Ghiglia D C,et al.. Phase gradient autofocus—A robust tool for highresolution sar phase correction[J].IEEE Transactions on Aerospace and Electronic Systems, 1994,30(3): 827–835. doi: 10.1109/7.303752 [14] 马萌, 李道京, 杜剑波. 振动条件下机载合成孔径激光雷达成像处理[J]. 雷达学报,2014, 3(5): 591–602. http://www.cnki.com.cn/Article/CJFDTOTAL-LDAX201405015.htmMa Meng, Li Dao-jing, and Du Jian-bo. Imaging of airborne synthetic aperture ladar under platformvibration condition[J].Journal of Radars, 2014, 3(5): 591–602. http://www.cnki.com.cn/Article/CJFDTOTAL-LDAX201405015.htm -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

