
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Synchronous Design and Test of Distributed Passive Radar Systems Based on Digital Broadcasting and Television
-
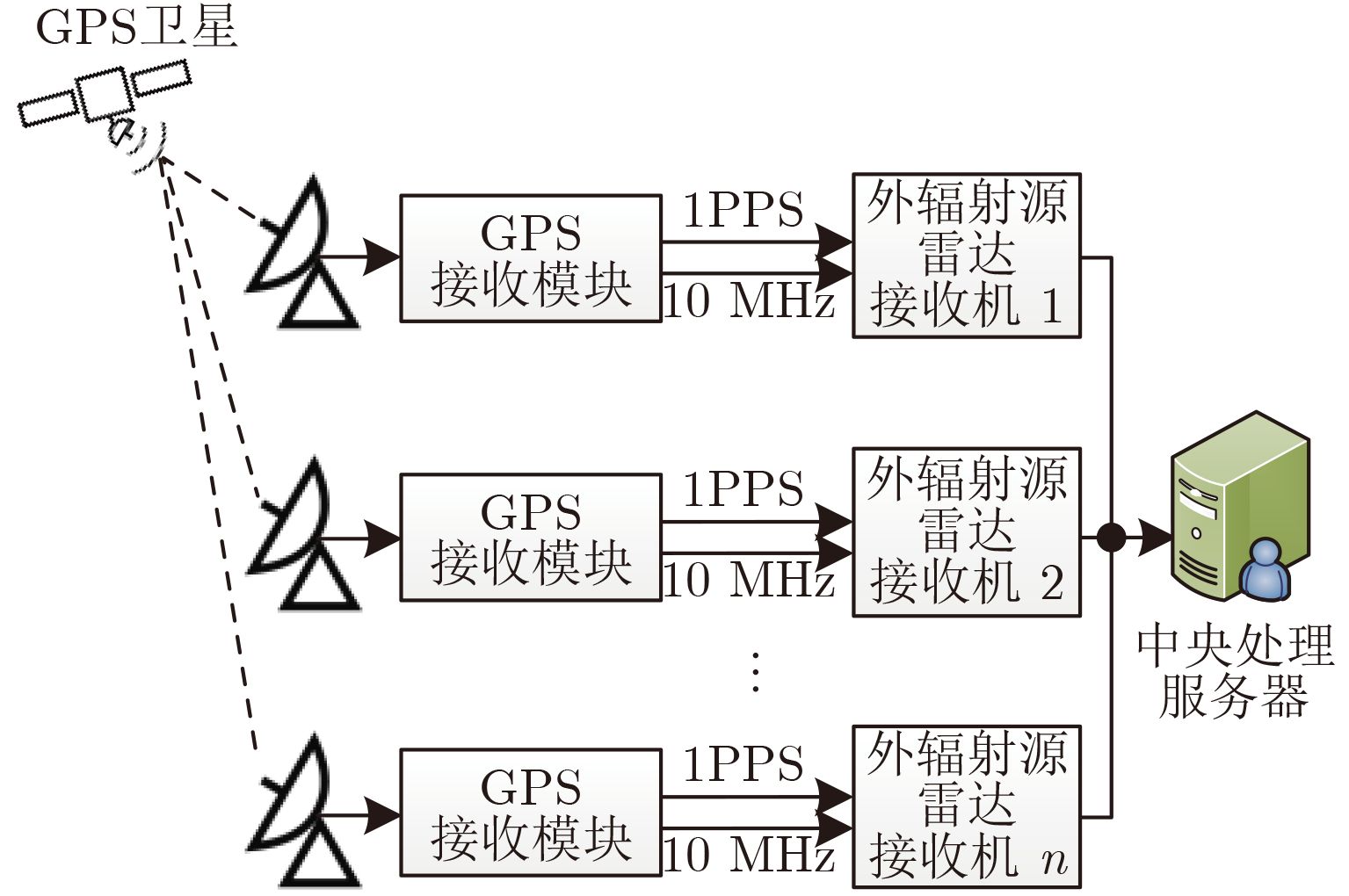
摘要: 数字广播电视是外辐射源雷达的重要机会照射源,分布式多基地结构是外辐射源雷达的发展趋势。新一代的数字广播电视广泛采用网络化覆盖方式,这为外辐射源雷达分布式组网探测提供了天然条件,同时也对外辐射源雷达系统设计提出了更高的要求。其中首先要解决的是接收站与照射源、多个单元接收站之间的同步问题,主要包括频率和时间同步。该文针对数字广播电视信号和外辐射源雷达结构特点,分析了分布式外辐射源雷达系统同步需求,设计了基于全球定位系统(GPS)授时技术的同步方案。利用中国移动多媒体广播信号帧结构特殊性,提出了一种系统同步测试方法,并结合分布式多站实验,通过实测数据分析,验证了该同步方案的可靠性。
-
关键词:
- 外辐射源雷达 /
- 分布式雷达系统 /
- 数字广播电视 /
- 全球定位系统(GPS) /
- 同步
Abstract: Digital broadcasting and television are important classes of illuminators of opportunity for passive radars. Distributed and multistatic structure are the development trends for passive radars. Most modern digital broadcasting and television systems work on a network, which not only provides a natural condition to distributed passive radar but also puts forward higher requirements on the design of passive radar systems. Among those requirements, precise synchronization among the receivers and transmitters as well as among multiple receiving stations, which mainly involves frequency and time synchronization, is the first to be solved. To satisfy the synchronization requirements of distributed passive radars, a synchronization scheme based on GPS is presented in this paper. Moreover, an effective scheme based on the China Mobile Multimedia Broadcasting signal is proposed to test the system synchronization performance. Finally, the reliability of the synchronization design is verified via the distributed multistatic passive radar experiments.-
Key words:
- Passive radar /
- Distributed radar system /
- Digital broadcast and television /
- GPS /
- Synchronous
-

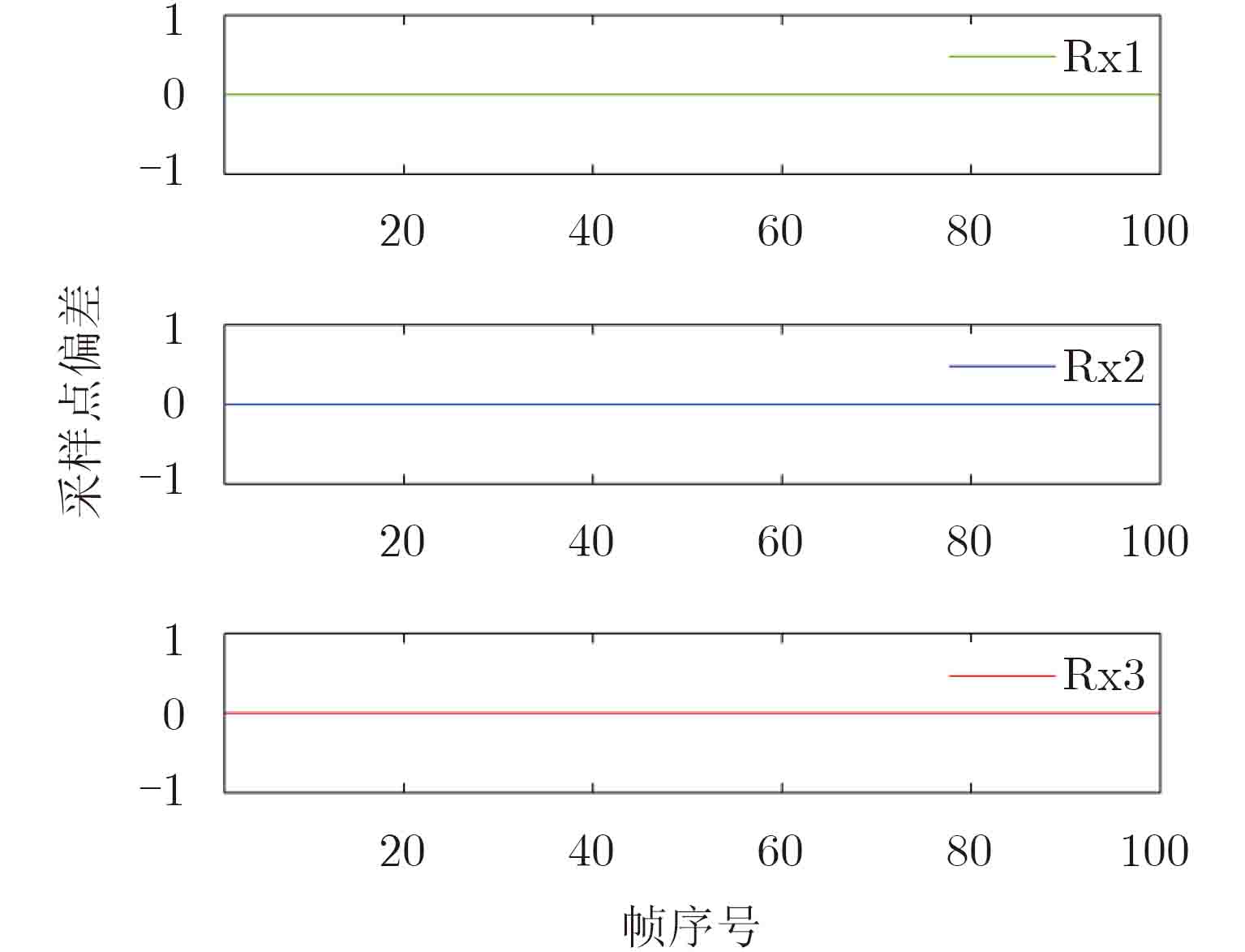
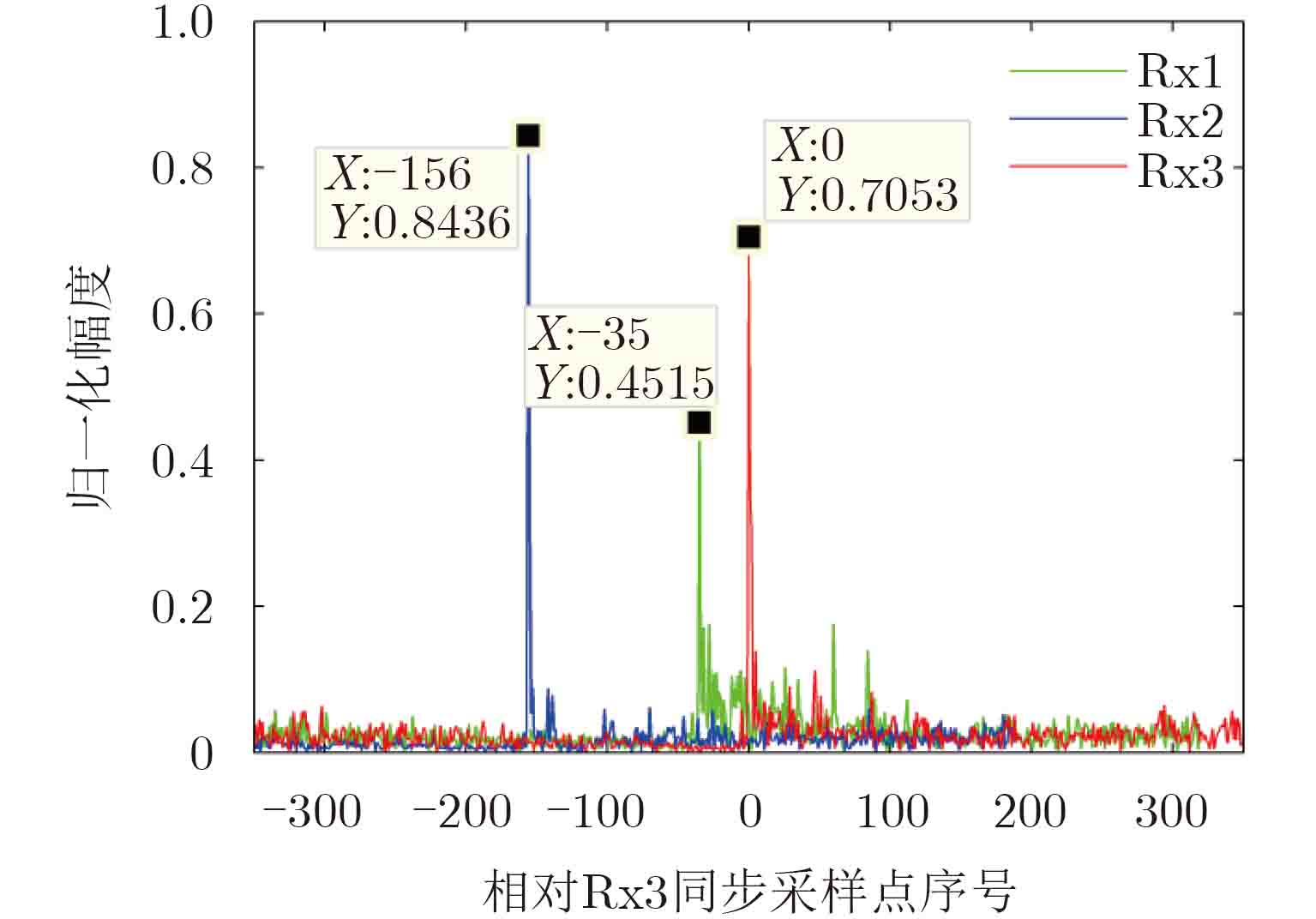
图 8 三站同步信号相对位置
Figure 8. Relative positions of the synchronization signals received by the receivers
表 1 10 MHz频率信号参数
Table 1. Parameters of the 10 MHz signal
参数 参数值 准确度 <10 –12 (24小时平均值) 保持精度 <5×10 –12 (GPS断开,24小时内) 每秒稳定度 <10 –11 相位噪声 –80 dBc/Hz@1 Hz; –140 dBc/Hz@1 kHz  下载: 导出CSV
下载: 导出CSV
表 2 1PPS信号参数
Table 2. Parameters of the 1PPS signal
参数 参数值 授时精度 30 ns (RMS) 上升沿时间 <10 ns 占空比 1:1
下载: 导出CSV
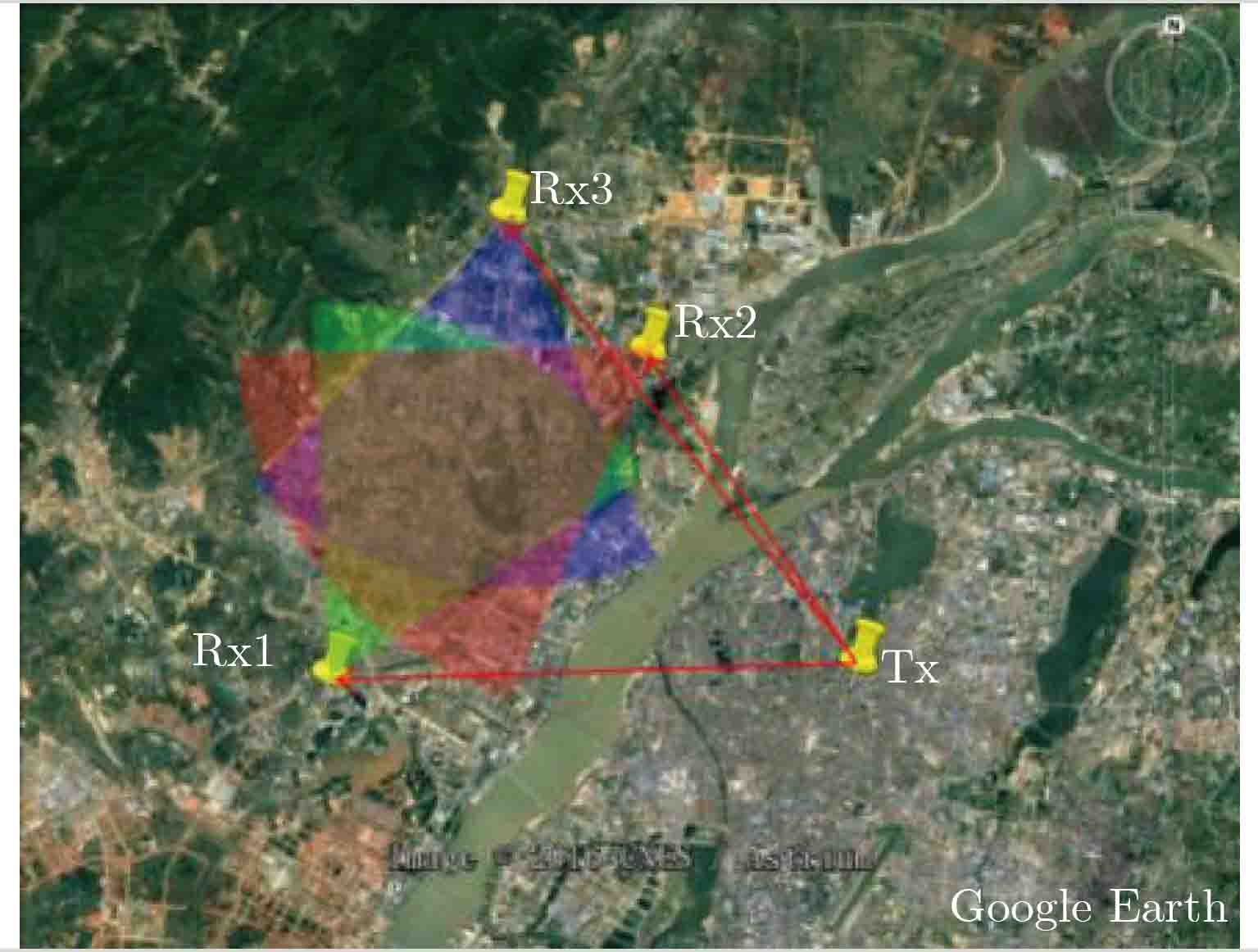
表 3 实验系统参数
Table 3. Parameters of the experiment system
参数 参数值 Rx1位置 (E115.7941°, N28.6643°) Rx2位置 (E115.8653°, N28.7406°) Rx3位置 (E115.8277°, N28.7676°) Tx位置 (E115.9234°, N28.6767°) 采样率 10 MHz 载波中心频率 714 MHz 信号带宽 8 MHz
下载: 导出CSV
-
[1] Howland P E, Griffiths H D, and Baker C J. Passive Bistatic Radar (Chapter in Bistatic Radar)[M]. Emerging Technology Wiley, Cherniakov Ed, ISBN 0470026308, 2008: 247–311. doi: 10.1002/9780470985755.ch5 [2] 万显荣, 易建新, 程丰, 等. 单频网分布式外辐射源雷达技术[J]. 雷达学报, 2014, 3(6): 623–631. http://radars.ie.ac.cn/CN/abstract/abstract225.shtmlWan Xian-rong, Yi Jian-xin, Cheng Feng, et al.. Single frequency network based distributed passive radar technology[J]. Journal of Radars, 2014, 3(6): 623–631. http://radars.ie.ac.cn/CN/abstract/abstract225.shtml [3] Daun M, Nickel U, and Koch W. Tracking in multistatic passive radar systems using DAB/DVB illumination[J]. Signal Processing, 2012, 92(6): 1365–1386. doi: 10.1016/j.sigpro.2011.09.005 [4] Radmard M, Karbasi S M, Khalaj B H, et al.. Data association in multi-input single-output passive coherent location schemes[J]. IET Radar, Sonar & Navigation, 2012, 6(3): 149–156. http://ieeexplore.ieee.org/document/6159148/ [5] Isohookana M and Pyykönen J. Design of a passive radar network[C]. Proceedings of the 7th European Radar Conference, Paris, France, 2010: 443–449. http://ieeexplore.ieee.org/document/5615098/ [6] Colone F, Bongioanni C, and Lombarbo P. Multifrequency integration in FM radio-based passive bistatic radar. Part I: Target detection[J]. IEEE Aerospace and Electronic Systems Magazine, 2013, 28(4): 28–39. doi: 10.1109/MAES.2013.6506827 [7] 杨振起, 张永顺, 骆永军. 双(多)基地雷达系统[M]. 北京: 国防工业出版社, 1998: 207–213.Yang Zhen-qi, Zhang Yong-shun, and Luo Yong-jun. Bistatic (Multistatic) Radar Systems[M]. Beijing: National Defense Industry Press, 1998: 207–213. [8] GB/T 2666–2011. 地面数字电视广播传输系统实施指南[S]. 中国国家标准, 2011.GB/T 2666–2011. Implementation guidelines for transmission system of digital terrestrial television broadcasting[S]. Chinese National Standard, 2011. [9] 赵志欣, 万显荣, 谢锐, 等. 载波频偏对正交频分复用波形外辐射源雷达性能影响的研究[J]. 电子与信息学报, 2013, 35(4): 871–876. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201304018.htmZhao Zhi-xin, Wan Xian-rong, Xie Rui, et al.. Impact of carrier frequency offset on passive bistatic radar with orthogonal frequency division multiplexing waveform[J]. Journal of Electronics & Information Technology, 2013, 35(4): 871–876. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201304018.htm [10] Searle S, Palmer J, and Davis L. On the effects of clock offset in OFDM-based passive bistatic radar[C]. 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, 2013: 3846–3850. http://ieeexplore.ieee.org/document/6638378/ [11] Baczyk M K, Kulpa K, Langellotti D, et al.. Evaluation of the impact of the sampling frequency offset on the performance of the passive radar based on DVB-T signal[C]. IEEE Radar Symposium, 2011: 333–338. [12] Yi Jian-xin, Wan Xian-rong, Leung H, et al.. MIMO passive radar tracking under a single frequency network[J]. IEEE Journal of Selected Topics in Signal Processing, 2015, 9(8): 1661–1671. doi: 10.1109/JSTSP.2015.2464188 [13] 孙仲康, 周一宇, 何黎星. 单多基地有源无源定位技术[M]. 北京: 国防工业出版社, 1996: 181–186.Sun Zhong-kang, Zhou Yi-yu, and He Li-xing. Active and Passive Positioning Technology of Bistatic and Multistatic Radar[M]. Beijing: National Defense Industry Press, 1996: 181–186. [14] Huang Yu-lin, Yang Jian-yu, Wu Jun-jie, et al.. Precise time frequency synchronization technology for bistatic radar[J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 929–933. doi: 10.1016/S1004-4132(08)60177-2 [15] GY/T 220. 1–2006. 移动多媒体广播第1部分: 广播信道帧结构、信道编码和调制[S]. 中国移动多媒体标准, 2006. http://www.docin.com/p-20212244.htmlGY/T 220.1–2006. Mobile multimedia broadcasting part1: Framing structure, channel coding and modulation for broadcasting channel[S]. China Mobile Multimedia Broadcasting Standard, 2006. http://www.docin.com/p-20212244.html [16] 胡俊. 基于OFDM的移动多媒体广播系统同步技术研究[D]. [硕士论文], 西安电子科技大学, 2009. http://cdmd.cnki.com.cn/Article/CDMD-10701-2009064699.htmHu Jun. Research on synchronization in mobile multimedia broadcasting system based on OFDM[D]. [Master dissertation], Xidian University, 2009. http://cdmd.cnki.com.cn/Article/CDMD-10701-2009064699.htm [17] 万显荣, 岑博, 易建新, 等. 中国移动多媒体广播外辐射源雷达参考信号获取方法研究[J]. 电子与信息学报, 2012, 34(2): 338–343. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201202015.htmWan Xian-rong, Cen Bo, Yi Jian-xin, et al.. Reference signal extraction methods for CMMB-based passive bistatic radar[J]. Journal of Electronics & Information Technology, 2012, 34(2): 338–343. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201202015.htm -



图(8) / 表(3)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

