
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Polarimetric SAR Terrain Classification Using Polarimetric Features Derived from Rotation Domain
-
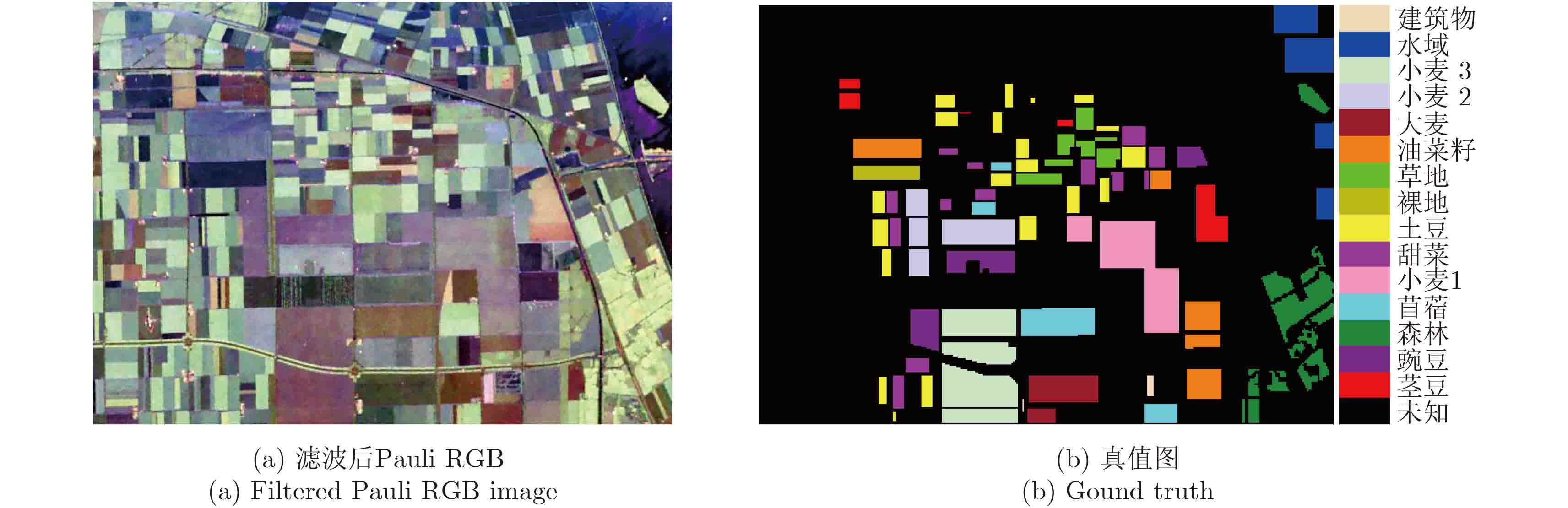
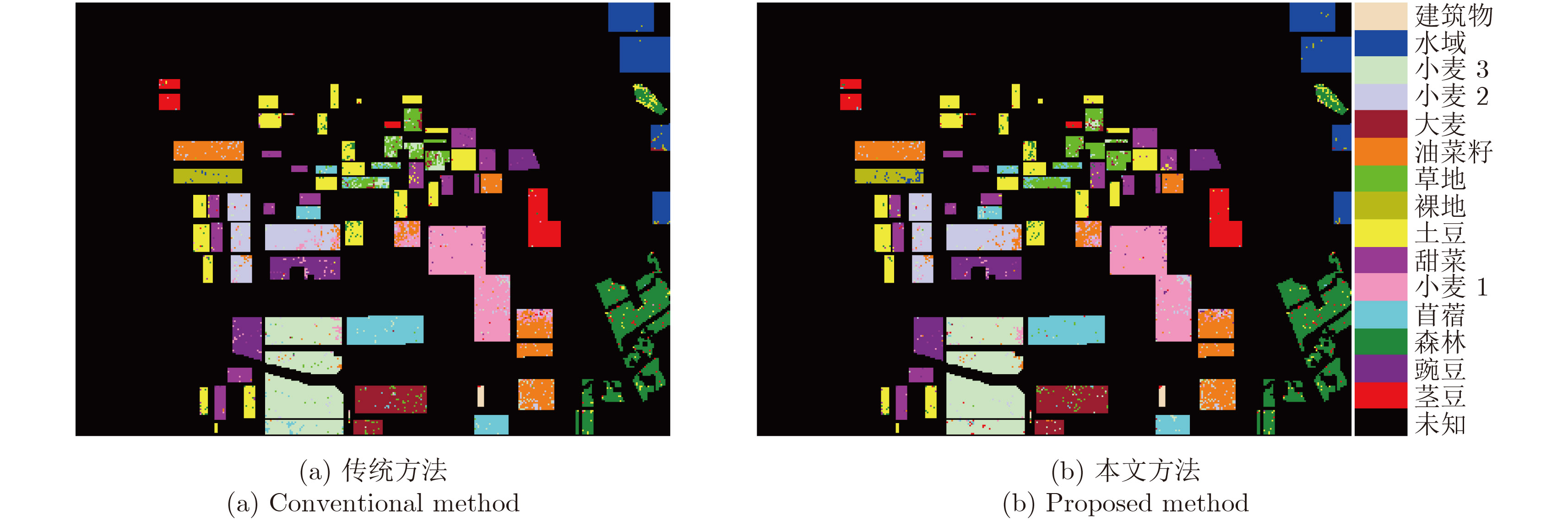
摘要: 地物分类是极化合成孔径雷达(SAR)图像理解与解译的重要应用方向。利用H/A/α/SPAN等旋转不变特征参数的极化SAR地物分类是一种常用的分类方法。然而,目标的后向散射响应与其方位取向等姿态密切相关,极易引起散射机理的解译模糊,也限制了仅使用旋转不变特征参数作为分类特征集的极化SAR地物分类方法的精度。针对这一问题,有文献提出了在绕雷达视线的旋转域中解译目标散射特性的统一的极化矩阵旋转理论,并导出了一系列旋转域极化特征,刻画目标旋转域隐含信息。基于该理论,该文将旋转域极化特征用于极化SAR地物辨识与分类,并发展了一种结合旋转域极化特征与旋转不变特征H/A/α/SPAN的极化SAR地物分类方法。该方法将优选的旋转域极化特征参数和H/A/α/SPAN作为支持向量机(SVM)分类器的输入,利用两类特征对不同地物类别区分辨识能力的互补,以达到更好的分类性能。对AIRSAR和UAVSAR实测数据的对比实验表明,相较于仅以H/A/α/SPAN作为SVM分类器输入的传统方法,该方法得到更好的分类精度和稳健性。其中,对于AIRSAR数据十五类地物的分类,该方法总体分类精度达到92.3%,优于传统方法的91.1%。此外,对于多时相UAVSAR数据七类地物的分类,该方法平均总体分类精度达到95.72%,显著优于传统方法的87.80%,验证了该方法对多时相数据的稳健性。该文研究进一步证实了通过深入挖掘旋转域中目标极化散射信息能够为极化SAR图像的解译与应用提供新的可行途径。Abstract: Terrain classification is an important application for understanding and interpreting Polarimetric Synthetic Aperture Radar (PolSAR) images. One common PolSAR terrain classification uses roll-invariant feature parameters such as H/A/α/SPAN. However, the back scattering response of a target is closely related to its orientation and attitude. This frequently introduces ambiguity in the interpretation of scattering mechanisms and limits the accuracy of the PolSAR terrain classification, which only uses roll-invariant feature parameters for classification. To address this problem, the uniform polarimetric matrix rotation theory, which interprets a target’s scattering properties when its polarimetric matrix is rotated along the radar line of sight and derives a series of polarimetric features to describe hidden information of the target in the rotation domain was proposed. Based on this theory, in this study, we apply the polarimetric features in the rotation domain to PolSAR terrain discrimination and classification, and develop a PolSAR terrain classification method using both the polarimetric features in the rotation domain and the roll-invariant features of H/A/α/SPAN. This method also uses both the selected polarimetric feature parameters in the rotation domain and H/A/α/SPAN as input for a Support Vector Machine (SVM) classifier and achieves better classification performance by complementing the terrain discrimination abilities of both. Results from comparison experiments based on AIRSAR and UAVSAR data demonstrate that compared with the conventional method, which only uses H/A/α/SPAN as SVM classifier input, the proposed method can achieve higher classification accuracy and better robustness. For fifteen terrain classes of AIRSAR data, the total classification accuracy of the proposed method was 92.3%, which is higher than the 91.1% of the conventional method. Moreover, for seven terrain classes of multi-temporal UAVSAR data, the averaged total classification accuracy of the proposed method was 95.72%, which is much higher than the 87.80% of the conventional method. These results demonstrate that our proposed method has better robustness for multi-temporal data. The research also demonstrates that mining and extracting polarimetric scattering information of a target deep in the rotation domain provides a feasible new approach for PolSAR image interpretation and application.
-

图 4 多时相UAVSAR数据滤波后Pauli RGB图
Figure 4. Filtered Pauli RGB images of multi-temporal UAVSAR data

图 6 传统方法对多时相UAVSAR数据分类结果
Figure 6. Classification results of multi-temporal UAVSAR data using conventional method

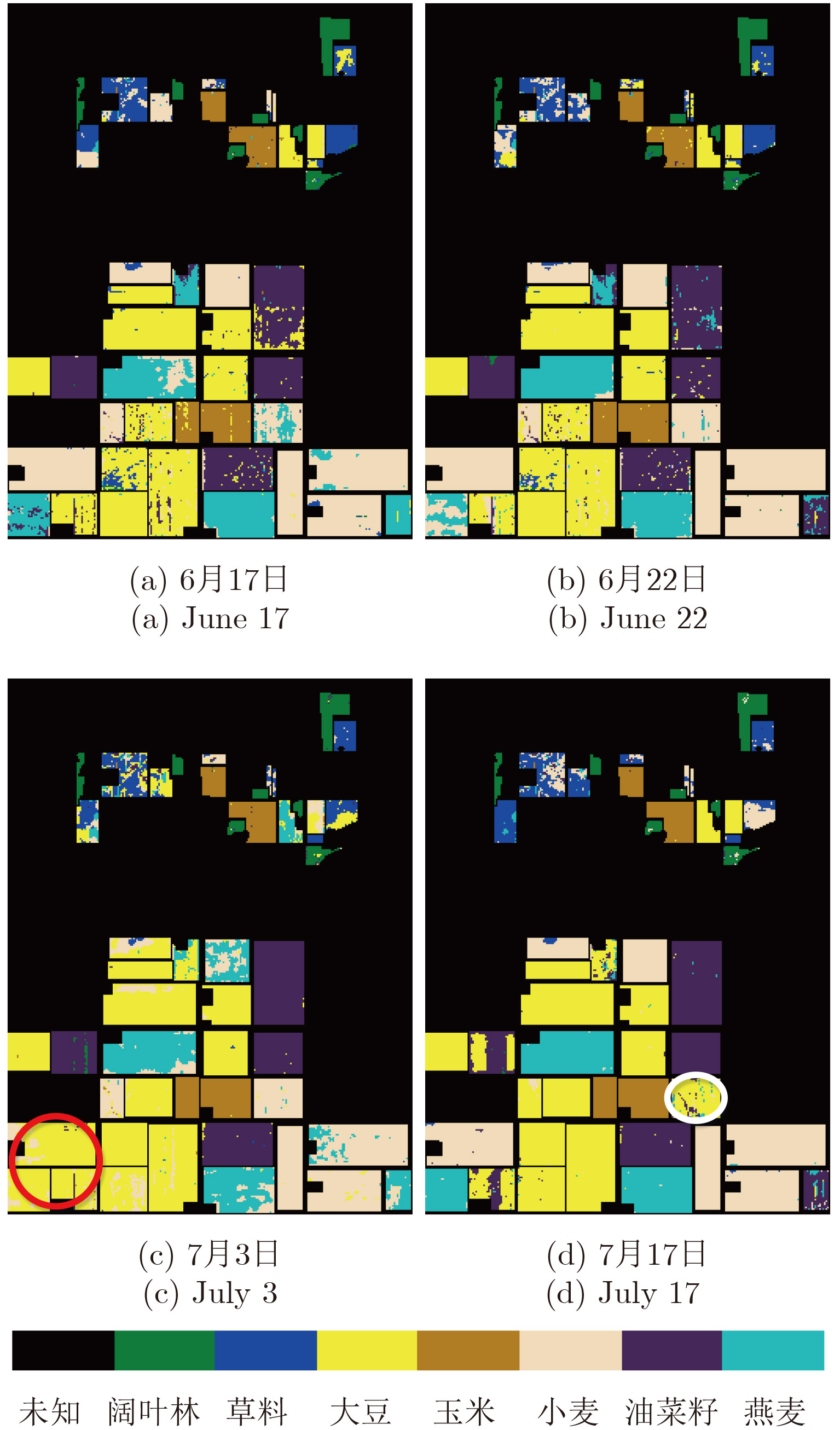
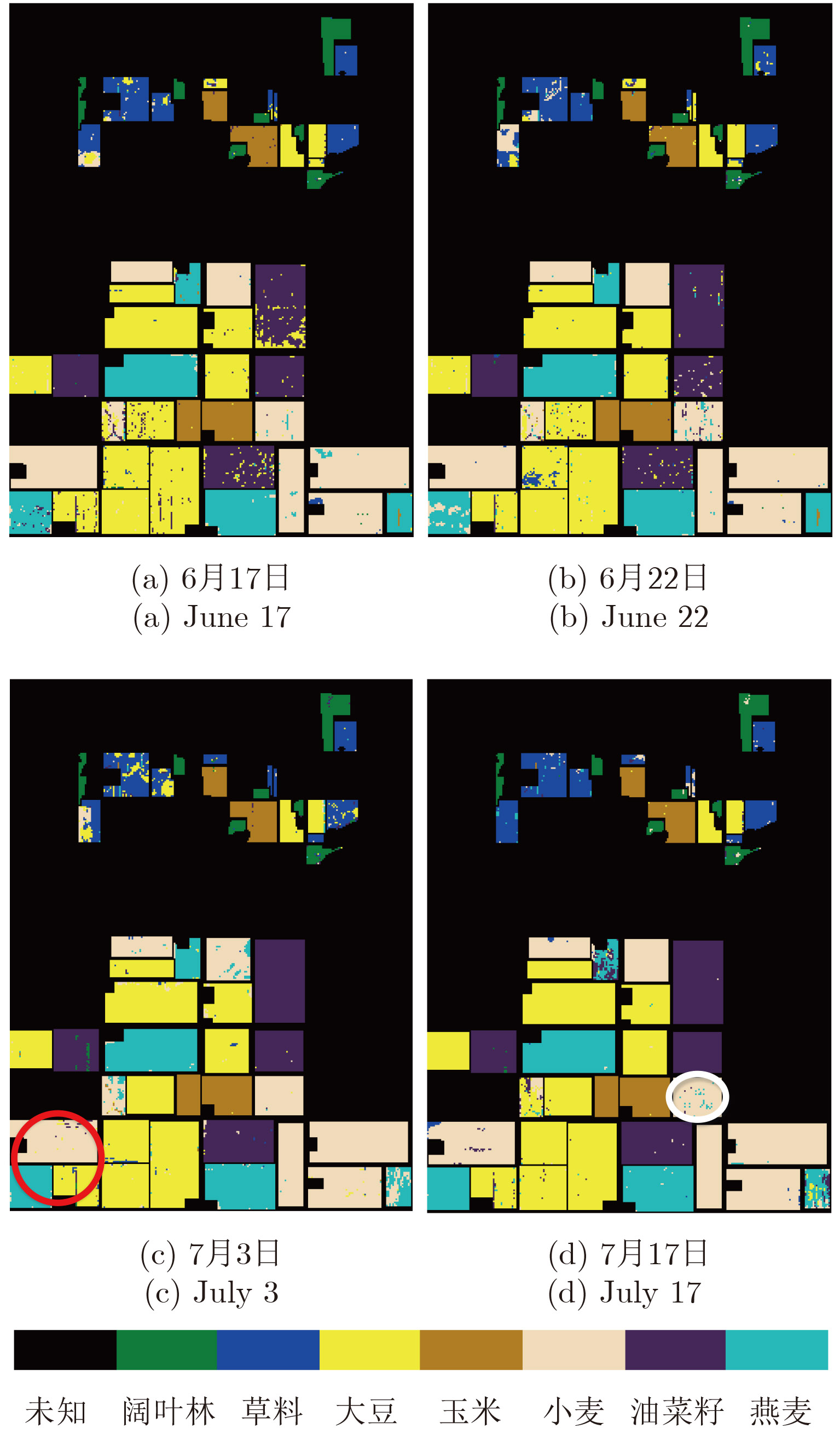
图 7 本文方法对多时相UAVSAR数据分类结果
Figure 7. Classification results of multi-temporal UAVSAR data using proposed method
散射矩阵元素项 $A = \sqrt \bullet $ B $\omega $ ${\theta _0} = \frac{1}{\omega }{\rm{Angle}}\left\{ \bullet \right\}$ ${\mathop{\rm Re}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]$ ${{\mathop{\rm Re}\nolimits} ^2}\left[ {{T_{12}}} \right] + {{\mathop{\rm Re}\nolimits} ^2}\left[ {{T_{13}}} \right]$ 0 2 ${\mathop{\rm Re}\nolimits} \left[ {{T_{13}}} \right] + j{\mathop{\rm Re}\nolimits} \left[ {{T_{12}}} \right]$ ${\mathop{\rm Re}\nolimits} \left[ {{T_{13}}\left( \theta \right)} \right]$ ${{\mathop{\rm Re}\nolimits} ^2}\left[ {{T_{12}}} \right] + {{\mathop{\rm Re}\nolimits} ^2}\left[ {{T_{13}}} \right]$ 0 2 $ - {\mathop{\rm Re}\nolimits} \left[ {{T_{12}}} \right] + j{\mathop{\rm Re}\nolimits} \left[ {{T_{13}}} \right]$ ${\mathop{\rm Im}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]$ ${{\mathop{\rm Im}\nolimits} ^2}\left[ {{T_{12}}} \right] + {{\mathop{\rm Im}\nolimits} ^2}\left[ {{T_{13}}} \right]$ 0 2 ${\mathop{\rm Im}\nolimits} \left[ {{T_{13}}} \right] + j{\mathop{\rm Im}\nolimits} \left[ {{T_{12}}} \right]$ ${\mathop{\rm Im}\nolimits} \left[ {{T_{13}}\left( \theta \right)} \right]$ ${{\mathop{\rm Im}\nolimits} ^2}\left[ {{T_{12}}} \right] + {{\mathop{\rm Im}\nolimits} ^2}\left[ {{T_{13}}} \right]$ 0 2 $ - {\mathop{\rm Im}\nolimits} \left[ {{T_{12}}} \right] + j{\mathop{\rm Im}\nolimits} \left[ {{T_{13}}} \right]$ ${\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]$ $\frac{1}{4}{\left( {{T_{33}} - {T_{22}}} \right)^2} + {\rm R}{{\rm e}^2}\left[ {{T_{23}}} \right]$ 0 4 $\frac{1}{2}\left( {{T_{33}} - {T_{22}}} \right) + j{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}} \right]$ ${T_{22}}\left( \theta \right)$ $\frac{1}{4}{\left( {{T_{33}} - {T_{22}}} \right)^2} + {\rm R}{{\rm e}^2}\left[ {{T_{23}}} \right]$ $\frac{1}{2}\left( {{T_{22}} + {T_{33}}} \right)$ 4 ${\mathop{\rm Re}\nolimits} \left[ {{T_{23}}} \right] + j\frac{1}{2}\left( {{T_{22}} - {T_{33}}} \right)$ ${T_{33}}\left( \theta \right)$ $\frac{1}{4}{\left( {{T_{33}} - {T_{22}}} \right)^2} + {\rm R}{{\rm e}^2}\left[ {{T_{23}}} \right]$ $\frac{1}{2}\left( {{T_{22}} + {T_{33}}} \right)$ 4 $ - {\mathop{\rm Re}\nolimits} \left[ {{T_{23}}} \right] + j\frac{1}{2}\left( {{T_{33}} - {T_{22}}} \right)$ ${\left| {{T_{12}}\left( \theta \right)} \right|^2}$ ${\rm R}{{\rm e}^2}\left[ {{T_{12}}T_{13}^*} \right] + \frac{1}{4}{\left( {{{\left| {{T_{13}}} \right|}^2} - {{\left| {{T_{12}}} \right|}^2}} \right)^2}$ $\frac{1}{2}\left( {{{\left| {{T_{12}}} \right|}^2} + {{\left| {{T_{13}}} \right|}^2}} \right)$ 4 ${\mathop{\rm Re}\nolimits} \left[ {{T_{12}}T_{13}^*} \right] + j\frac{1}{2}\left( {{{\left| {{T_{12}}} \right|}^2} - {{\left| {{T_{13}}} \right|}^2}} \right)$ ${\left| {{T_{13}}\left( \theta \right)} \right|^2}$ ${\rm R}{{\rm e}^2}\left[ {{T_{12}}T_{13}^*} \right] + \frac{1}{4}{\left( {{{\left| {{T_{13}}} \right|}^2} - {{\left| {{T_{12}}} \right|}^2}} \right)^2}$ $\frac{1}{2}\left( {{{\left| {{T_{12}}} \right|}^2} + {{\left| {{T_{13}}} \right|}^2}} \right)$ 4 $ - {\mathop{\rm Re}\nolimits} \left[ {{T_{12}}T_{13}^*} \right] + j\frac{1}{2}\left( {{{\left| {{T_{13}}} \right|}^2} - {{\left| {{T_{12}}} \right|}^2}} \right)$ ${\left| {{T_{23}}\left( \theta \right)} \right|^2}$ $\frac{1}{4}{\left\{ {\frac{1}{4}{{\left( {{T_{33}} - {T_{22}}} \right)}^2} + {\rm R}{{\rm e}^2}\left[ {{T_{23}}} \right]} \right\}^2}$ $\begin{array}{l}\frac{1}{2}\left\{ {\frac{1}{4}{{\left( {{T_{33}} - {T_{22}}} \right)}^2} + {\rm R}{{\rm e}^2}\left[ {{T_{23}}} \right]} \right\}\\ + {{\mathop{\rm Im}\nolimits} ^2}\left[ {{T_{23}}} \right]\end{array}$ 8 $\frac{1}{2}\left( {{T_{33}} - {T_{22}}} \right){\rm Re}\left[ {{T_{23}}} \right] \\+ j\frac{1}{2}\left[ {{{{\mathop{\rm Re}\nolimits} }^2}\left[ {{T_{23}}} \right] - \frac{1}{4}{{\left( {{T_{33}} - {T_{22}}} \right)}^2}} \right]$  下载: 导出CSV
下载: 导出CSV
表 2 针对不同极化SAR实测数据的特征优选结果
Table 2. Selected features for different PolSAR data
实测数据 优选所得旋转域极化特征(相应地物类别对的个数) AIRSAR ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]\left( {18} \right)$, ${\theta _{{\rm{null}}}}\_{\rm Im}\left[ {{T_{12}}\left( \theta \right)} \right]\left( {15} \right)$, ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]\left( {71} \right)$, $B\_{T_{33}}\left( \theta \right)\left( {1} \right)$ UAVSAR 6月17日 ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]$(5), ${\theta _{{\rm{null}}}}\_{\rm Im}\left[ {{T_{12}}\left( \theta \right)} \right]$(12), ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]$(4) 6月22日 ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]$(5), ${\theta _{{\rm{null}}}}\_{\rm Im}\left[ {{T_{12}}\left( \theta \right)} \right]$(14), ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]$(2) 7月03日 ${\theta _{{\rm{null}}}}\_{\rm Im}\left[ {{T_{12}}\left( \theta \right)} \right]$(3), ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]$(18) 7月17日 ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{12}}\left( \theta \right)} \right]$(7), ${\theta _{{\rm{null}}}}\_{\rm Im}\left[ {{T_{12}}\left( \theta \right)} \right]$(5), ${\theta _{{\rm{null}}}}\_{\mathop{\rm Re}\nolimits} \left[ {{T_{23}}\left( \theta \right)} \right]$(9)
下载: 导出CSV
表 3 两种方法所得AIRSAR数据15类地物及总体的分类精度(%)
Table 3. Classification accuracy of different terrains in AIRSAR data using two methods (%)
地物 传统方法 本文方法 茎豆 97.2 98.0 豌豆 93.7 96.9 森林 92.6 93.7 苜蓿 96.8 96.6 小麦1 88.7 85.9 甜菜 93.8 93.8 土豆 92.6 93.3 裸地 95.5 87.2 草地 59.3 77.3 油菜籽 83.9 88.0 大麦 92.6 91.5 小麦2 89.2 89.4 小麦3 94.3 95.9 水域 98.0 98.5 建筑物 84.9 83.2 总体精度 91.1 92.3
下载: 导出CSV
表 4 两种方法所得多时相UAVSAR数据7类地物及总体的分类精度 (%)
Table 4. The classification accuracy of different terrains in multi-temporal UAVSAR data using two methods (%)
日期 方法 阔叶林 草料 大豆 玉米 小麦 油菜籽 燕麦 总体 6月17日 传统 98.47 62.24 92.64 96.12 93.63 91.70 86.37 90.19 本文 98.49 81.65 96.76 98.19 96.08 92.25 96.32 94.98 6月22日 传统 98.05 61.38 94.14 97.30 97.89 93.82 77.29 90.75 本文 97.96 72.60 96.86 98.18 97.07 96.84 95.13 95.12 7月3日 传统 97.41 54.38 90.45 98.89 68.75 98.81 63.46 80.87 本文 97.77 76.68 98.12 99.08 96.95 98.93 94.22 95.99 7月17日 传统 96.86 64.51 97.38 99.78 84.76 92.19 82.98 89.39 本文 97.27 93.15 99.31 99.58 94.73 99.71 92.16 96.78 平均 传统 97.70 60.63 93.65 98.02 86.26 94.13 77.53 87.80 本文 97.87 81.02 97.76 98.76 96.21 96.93 94.46 95.72
下载: 导出CSV
-
[1] Lee J S and Pottier E. Polarimetric Radar Imaging: From Basics to Applications[M]. Boca Raton, FL, USA, CRC Press, 2009. [2] 吴永辉, 计科峰, 郁文贤. SVM全极化SAR图像分类中的特征选择[J]. 信号处理, 2007, 23(6): 877–881. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200706021.htmWu Yonghui, Ji Kefeng, and Yu Wenxian. A new feature selection algorithm for SVM-based fully polarimetric SAR image classification[J]. Signal Processing, 2007, 23(6): 877–881. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200706021.htm [3] Cloude S R and Pottier E. A review of target decomposition theorems in radar polarimetry[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(2): 498–518. doi: 10.1109/36.485127 [4] Freeman A and Durden S L. A three-component scattering model for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. doi: 10.1109/36.673687 [5] Yamaguchi Y, Moriyama T, Ishido M, et al.. Four-component scattering model for polarimetric SAR image decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(8): 1699–1706. doi: 10.1109/TGRS.2005.852084 [6] Chen S W, Wang X S, Xiao S P, et al.. General polarimetric model-based decomposition for coherency matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3): 1843–1855. doi: 10.1109/TGRS.2013.2255615 [7] Chen S W, Li Y Z, Wang X S, et al.. Modeling and interpretation of scattering mechanisms in polarimetric synthetic aperture radar: Advances and perspectives[J]. IEEE Signal Processing Magazine, 2014, 31(4): 79–89. doi: 10.1109/MSP.2014.2312099 [8] Cloude S R and Pottier E. An entropy based classification scheme for land applications of polarimetric SARs[J]. IEEE Transactions on Geoscience and Remote Sensing, 1997, 35(1): 68–78. doi: 10.1109/36.551935 [9] Lee J S, Grunes M R, Ainsworth T L, et al.. Unsupervised classification of polarimetric SAR images by applying target decomposition and complex Wishart distribution[J]. IEEE Transactions on Geoscience and Remote Sensing, 1999, 37(5): 2249–2258. doi: 10.1109/36.789621 [10] 赵一博. 基于SVM和RBF神经网络的极化SAR图像分类方法研究[D]. [硕士论文], 国防科学技术大学, 2013.Zhao Yibo. Classification of polarimetric SAR image based on SVM and RBF neural network[D]. [Master dissertation], National University of Defense Technology, 2013. [11] 吴永辉, 计科峰, 郁文贤. 基于H-alpha和改进C-均值的全极化SAR图像非监督分类[J]. 电子与信息学报, 2007, 29(1): 30–34. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200701007.htmWu Yonghui, Ji Kefeng, and Yu Wenxian. Unsupervised classification of fully polarimetric SAR image using H-alpha decomposition and modified C-Mean algorithm[J]. Journal of Electronics & Information Technology, 2007, 29(1): 30–34. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200701007.htm [12] Chen S W, Wang X S, and Sato M. Uniform polarimetric matrix rotation theory and its applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4756–4770. doi: 10.1109/TGRS.2013.2284359 [13] Chen S W, Li Y Z, and Wang X S. Crop discrimination based on polarimetric correlation coefficients optimization for PolSAR data[J]. International Journal of Remote Sensing, 2015, 36(16): 4233–4249. doi: 10.1080/01431161.2015.1079345 [14] Xiao S P, Chen S W, Chang Y L, et al.. Polarimetric coherence optimization and its application for manmade target extraction in PolSAR data[J]. IEICE Transactions on Electronics, 2014, 97(6): 566–574. [15] Chang C C and Lin C J. LIBSVM: Alibrary for support vector machines[J]. ACM Transactions on Intelligent Systems and Technology, 2011, 2(3): 389–396. [16] Chen S W, Wang X S, and Sato M. PolInSAR complex coherence estimation based on covariance matrix similarity test[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(11): 4699–4709. doi: 10.1109/TGRS.2012.2192937 -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

