
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Combined Conditional Random Fields Model for Supervised PolSAR Images Classification
-
摘要: 在复杂极化SAR (Synthetic Aperture Radar, SAR)图像的地物分类中,可以通过提取多种特征及利用上下文信息来提高分类精度。特征维度的增加会产生过拟合和特征干扰,从而导致分类器性能降低。针对这个问题,该文提出了一种基于组合条件随机场(Conditional Random Fields, CRF)的极化SAR图像监督地物分类方法。不同于CRF模型通过将多个特征矢量堆叠形成一个新的特征矢量以利用多种特征信息的传统方式,组合CRF模型首先将不同类型特征分成多个特征子集合分别训练同一个CRF模型得到多个有差异的子分类器,从而得到多个地物分类结果,然后以单个子分类器的归一化总体分类精度作为加权系数将多个分类结果进行融合以得到最终的分类结果。两组真实极化SAR图像分类实验结果表明,该文方法的分类精度比利用单个特征矢量单个子分类器的分类精度有明显提升。对于实验采用的两组数据,该文方法的分类精度比利用多个特征矢量堆叠的分类精度分别提高13.38%和11.55%,同时也比基于SVM (Support Vector Machines, SVM)的分类精度分别提高13.78%和14.75%。Abstract: More features and contextual information can be extracted and exploited to improve classification accuracy in complex Polarimetric Synthetic Aperture Radar (PolSAR) imagery classification. However, the problems of overfitting and feature interference caused by the increased high dimensions of features lead to poor classification performance. To address these problems, a PolSAR image classification method based on combined Conditional Random Fields (CRF) is proposed in this paper. Unlike the traditional way of utilizing multiple feature information wherein multiple feature vectors are directly stacked to form a new one, combined CRF first forms multiple feature subsets according to different feature types and utilizes these feature subsets to train the same CRF model to obtain multiple child classifiers, thus obtaining multiple classification results. Then, the final classification result is gained by fusing multiple child classification results with the normalized overall classification accuracy of each classifier as the weight. Extensive experiments conducted on two real-world PolSAR images demonstrate that the accuracy of the proposed method is significantly improved than that of the single child classifier. For both the data sets used for performance evaluation, the classification accuracies of the proposed method increased by 13.38% and 11.55% than those of the method of stacking features, respectively, and by 13.78% and 14.75% than those of support vector machine-based method, respectively.
-

图 1 基于组合CRF模型的极化SAR图像分类流程图
Figure 1. Flowchart of the combined CRF model for PolSAR images classification

图 3 基于堆叠特征的CRF分类器分类结果
Figure 3. Classification result of CRF model based on stacking features

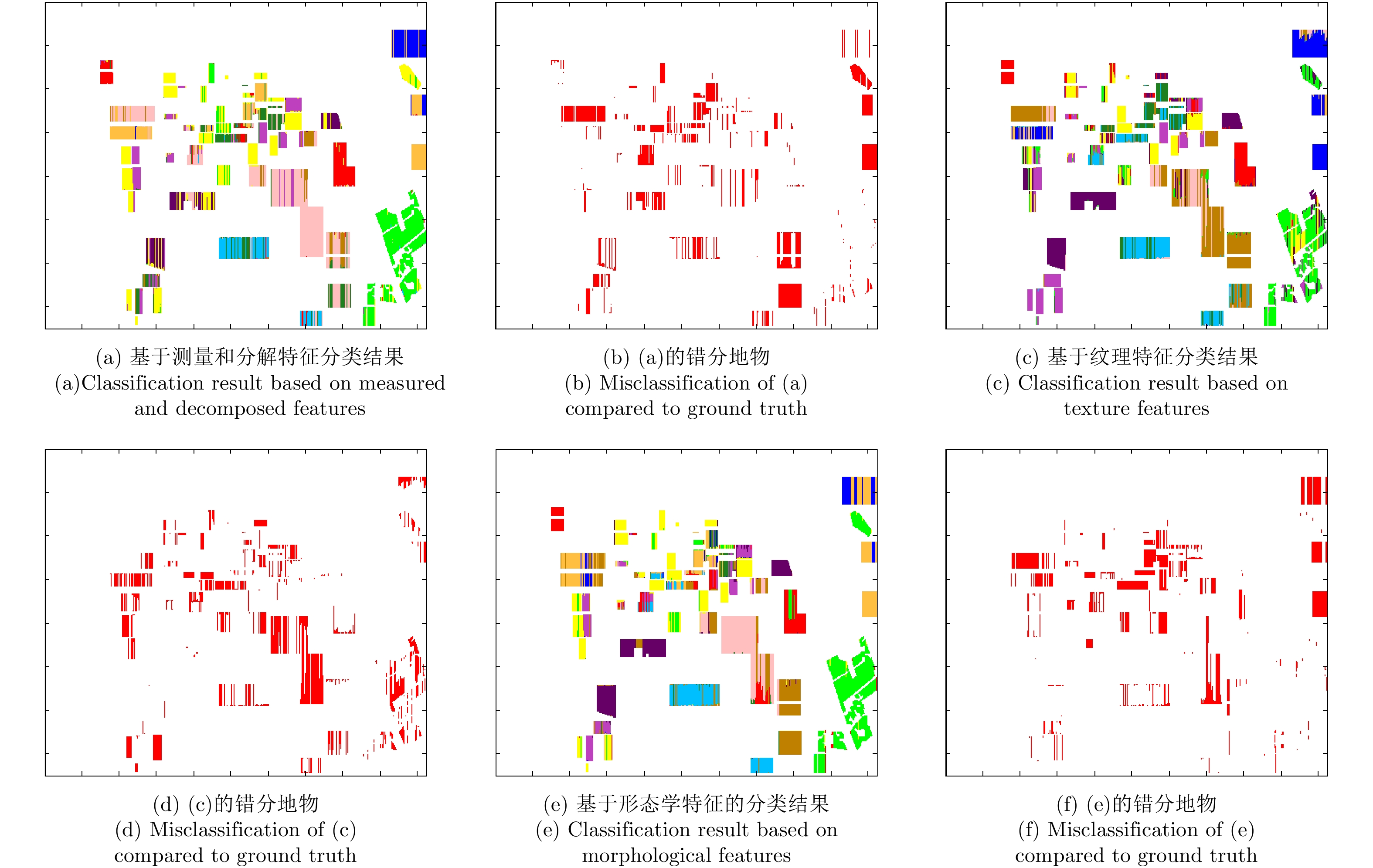
图 4 基于不同特征的子分类器分类结果
Figure 4. Classification results based on child classifiers using different features

图 6 基于l-1特征选择的CRF分类器分类结果
Figure 6. Classification result of CRF model based on l-1 features selection

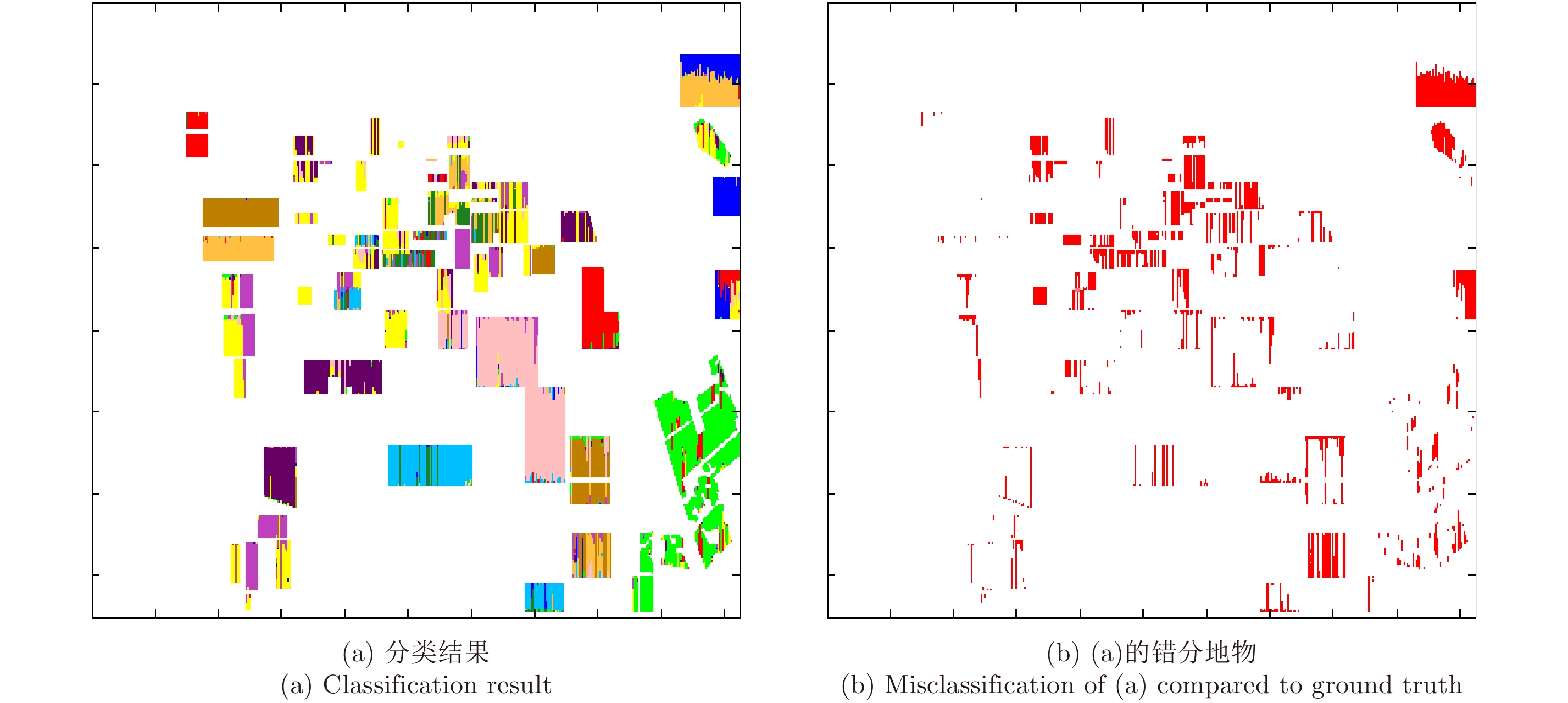
图 8 基于投票方法的组合CRF分类结果
Figure 8. Classification result of combined CRF model based on majority voting

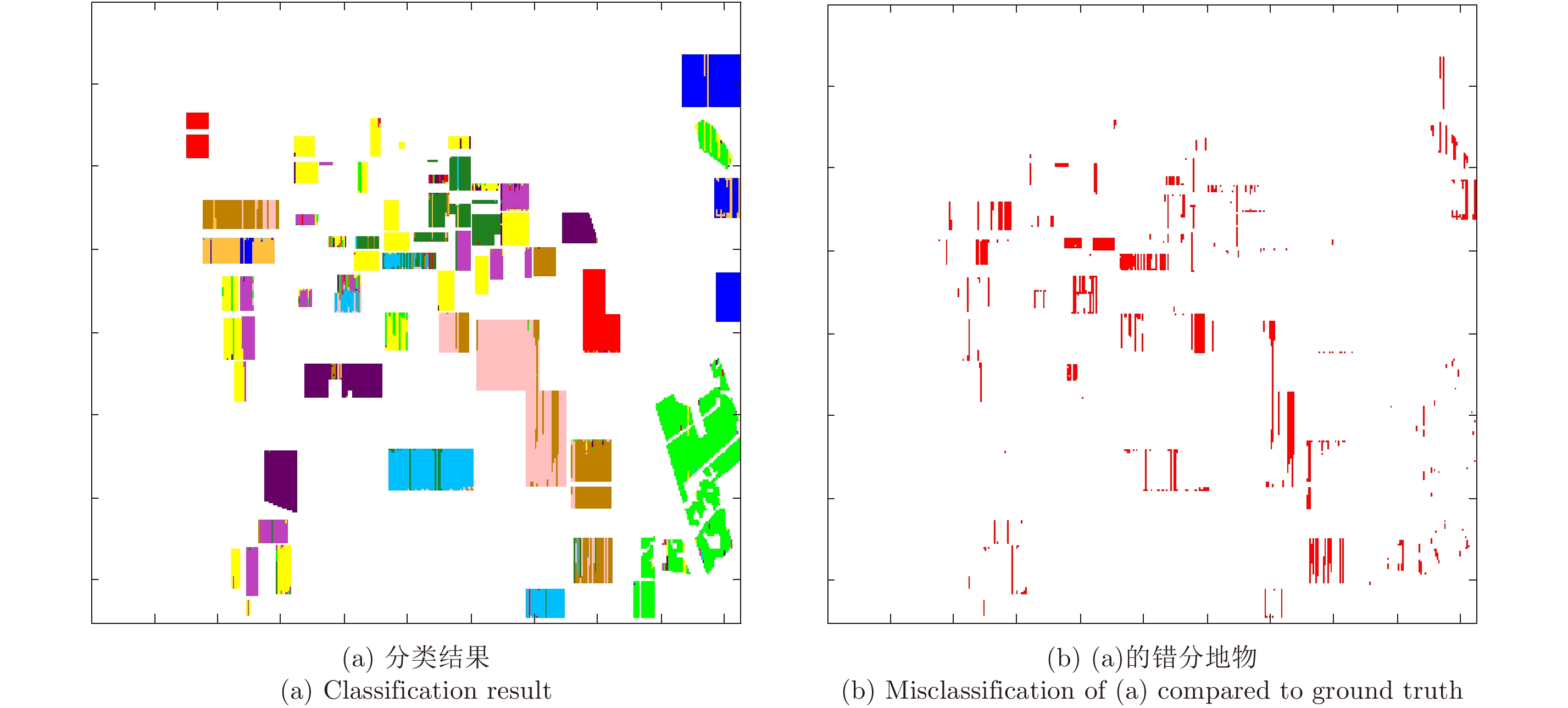
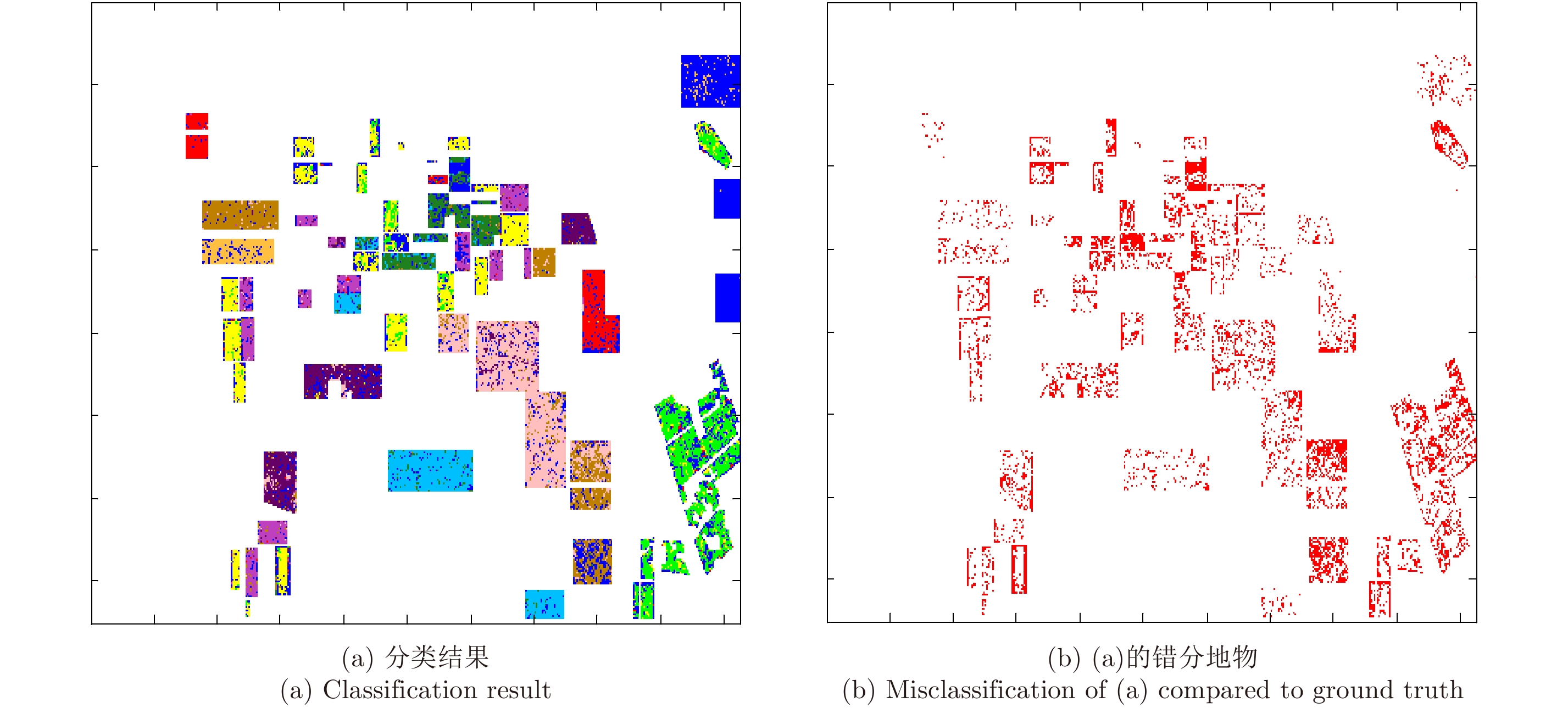
图 9 基于堆叠特征的CRF分类结果
Figure 9. Classification result of CRF model based on stacking features

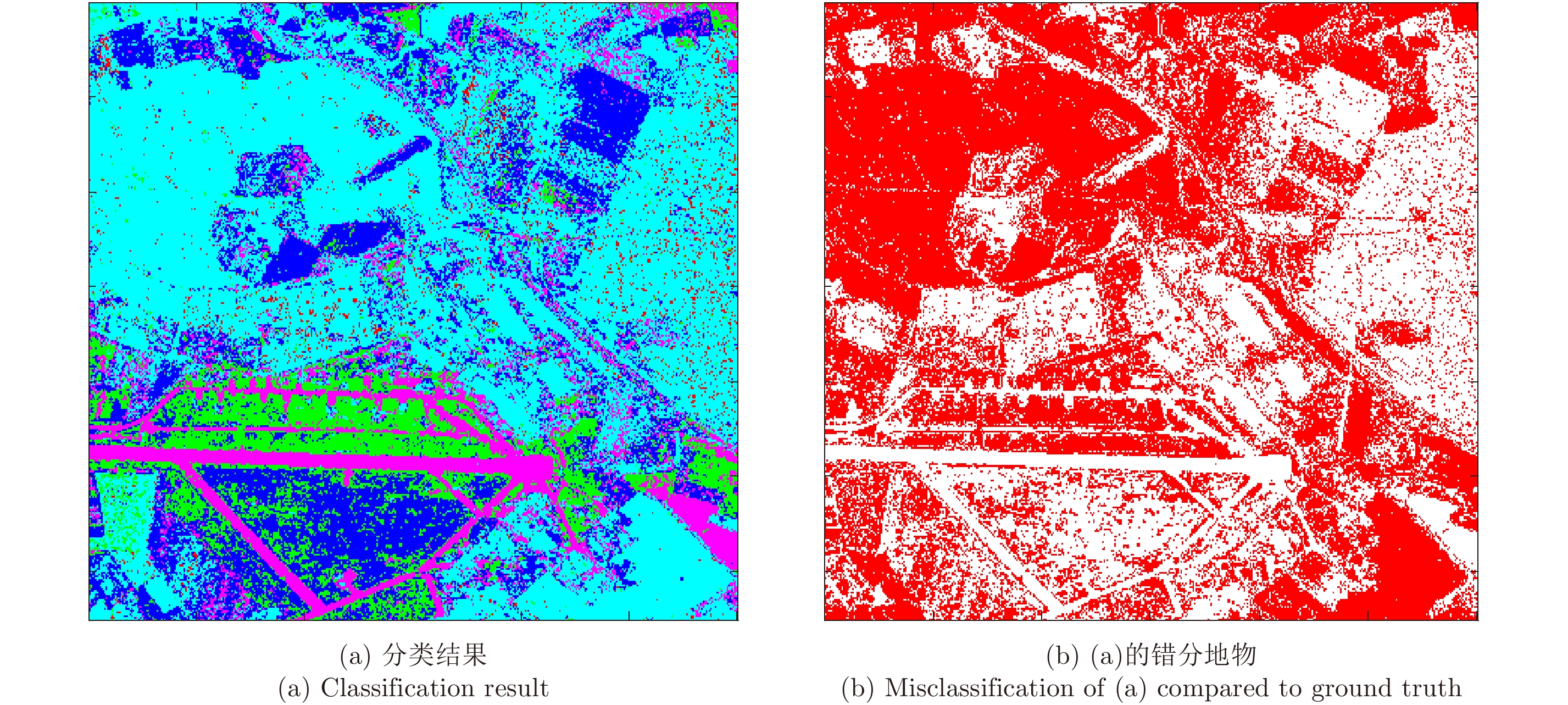
图 12 基于l-1特征选择分类器分类结果
Figure 12. Classification result of CRF model based on l-1 features selection

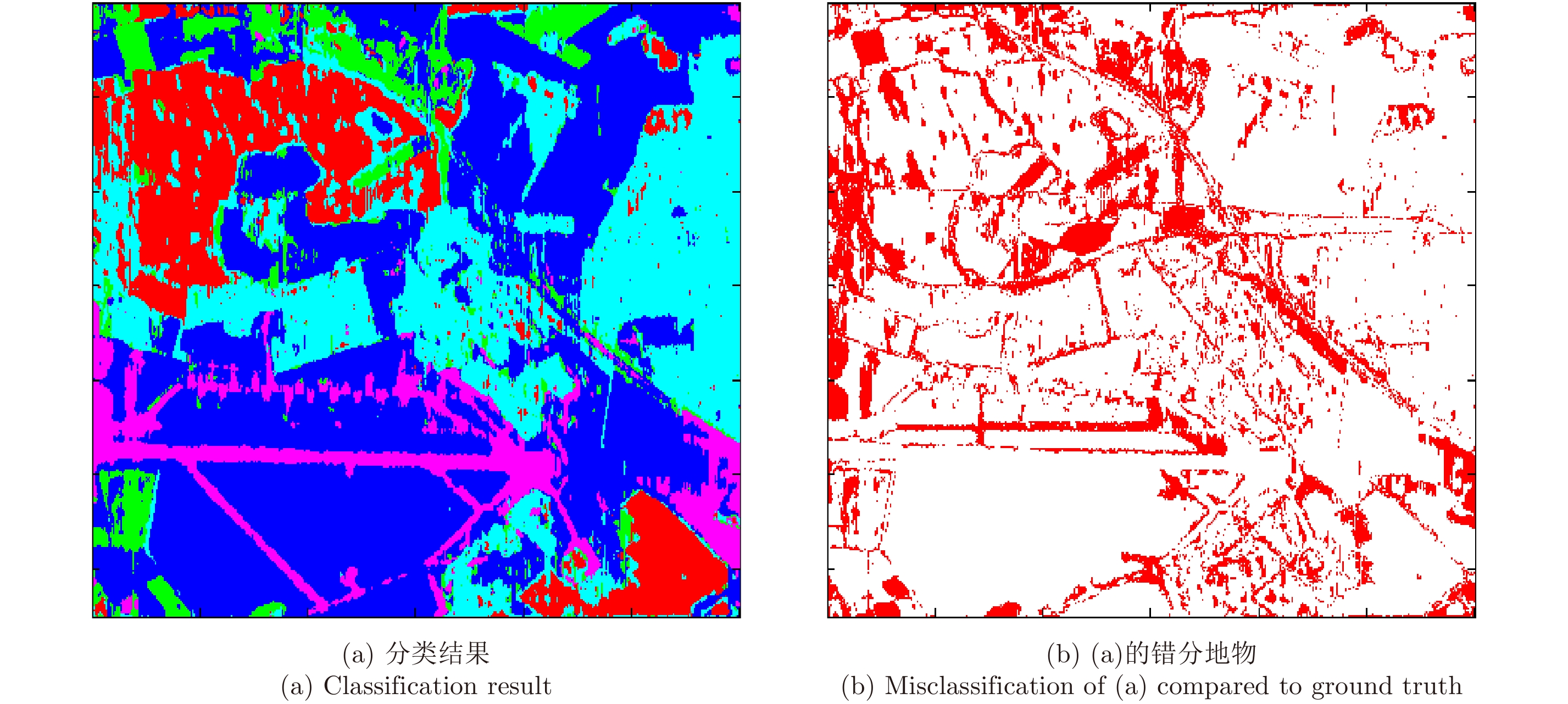
图 14 基于投票表决法的组合CRF分类结果
Figure 14. Classification result of CRF model based on majority voting
表 1 本文方法使用的特征
Table 1. Features used in the proposed method
特征 描述 特征内容 数量 基于测量和目标分解的特征 协方差矩阵上三角 |C11|, |C12|, |C13|, |C22|, |C23|, |C33| 6 VV/HH比值[25] 10log(|SVV|2$\big/$|SHH|2) 1 HV/HH比值[25] 10log(|SHV|2$\big/$|SHH|2) 1 HV/VV比值[25] 10log(|SHV|2$\big/$|SVV|2) 1 Yamaguchi 四分量分解 表面散射(Ps)、二次散射(Pd)、体散射(Pv)、螺旋体散射(Pc) 4 ${\rm{H}}/{\rm{\alpha }}/{\rm A}$分解 熵(H)、平均散射机制( ${\rm{\alpha }}$)、各向异性系数(A) 3 Freeman分解 表面散射(Ps)、二次散射(Pd)、体散射(Pv) 3 纹理特征 基于GLCM的纹理特征 相关性、对比度、熵、同质性 4 形态学特征 腐蚀和膨胀[21] 重建开操作、重建闭操作 8  下载: 导出CSV
下载: 导出CSV
表 2 堆叠特征分类精度
Table 2. Classification accuracy of stacking features
类别 豆类 森林 马铃薯 苜蓿 小麦 裸土 甜菜 油菜籽 豌豆 草地 水体 用户精度 豆类 6486 66 30 0 0 0 48 0 153 66 0 0.9470 森林 1210 15171 1333 46 74 11 284 11 343 4 62 0.8179 马铃薯 340 220 11831 15 1292 44 1521 14 2736 92 65 0.6378 苜蓿 523 42 110 7743 84 164 69 39 5 1266 476 0.7360 小麦 13 63 94 258 15723 21 656 76 51 26 1073 0.8709 裸土 6 2 5 2 0 3266 0 24 1 0 0 0.9879 甜菜 33 0 2716 53 27 22 7309 30 42 172 6 0.7021 油菜籽 5 219 63 25 1095 1757 404 10013 126 2 284 0.7156 豌豆 3 117 888 12 332 26 37 45 8630 5 12 0.8539 草地 392 12 808 481 48 2703 415 151 49 2312 100 0.3092 水体 18 57 429 18 207 3449 30 4 0 2 6192 0.5950 制图精度 0.9035 0.9500 0.6463 0.8948 0.8327 0.2859 0.6785 0.9621 0.7111 0.5858 0.7487 总体分类精度:74.06%;Kappa系数:0.7113
下载: 导出CSV
表 3 组合CRF分类精度
Table 3. Classification accuracy of combined CRF model
类别 豆类 森林 马铃薯 苜蓿 小麦 裸土 甜菜 油菜籽 豌豆 草地 水体 用户精度 豆类 6467 93 36 60 12 0 64 0 1 116 0 0.9442 森林 97 17095 1234 97 18 0 0 2 3 3 2 0.9216 马铃薯 37 534 17155 41 14 2 180 46 74 86 1 0.9441 苜蓿 263 1 15 8482 460 15 5 45 1 1234 0 0.8062 小麦 14 0 8 0 16807 2 2 1145 76 0 0 0.9309 裸土 0 0 0 0 0 3173 0 17 0 0 116 0.9598 甜菜 14 11 857 8 102 9 8598 400 141 270 0 0.8259 油菜籽 0 0 8 5 4134 658 2 8748 77 361 0 0.6252 豌豆 0 0 131 3 289 4 0 283 9388 8 1 0.9289 草地 172 4 138 568 73 255 1 33 0 6263 0 0.8376 水体 4 0 0 1 1 1152 0 0 1 0 9247 0.8886 制图精度 0.9150 0.9638 0.8761 0.9155 0.7671 0.6055 0.9713 0.8161 0.9617 0.7509 0.9874 总体分类精度:87.44%;Kappa系数:0.8596
下载: 导出CSV
表 4 堆叠特征分类精度
Table 4. Classification accuracy of stacking features
类别 道路 林地 城郊 农田 其他 用户精度 道路 122208 1456 6531 9828 18352 0.7435 林地 1913 91840 50760 106297 8531 0.3541 城郊 25348 9464 204174 16170 40917 0.6896 农田 2552 5649 6351 64194 30475 0.5880 其他 109049 150 10698 24033 473749 0.7670 制图精度 0.4877 0.8539 0.7384 0.2925 0.8282 总体分类精度:66.78%;Kappa系数:0.5547
下载: 导出CSV
表 5 组合CRF分类精度
Table 5. Classification accuracy of combined CRF model
类别 道路 林地 城郊 农田 其他 用户精度 道路 93169 1970 7725 3805 57661 0.5668 林地 434 201255 50737 4032 2883 0.7760 城郊 955 10321 267059 9783 7955 0.9020 农田 407 12851 18465 56485 20968 0.5174 其他 22984 2355 23078 54041 515211 0.8341 制图精度 0.7899 0.8798 0.7276 0.4406 0.8520 总体分类精度:78.33%;Kappa系数:0.7013
下载: 导出CSV
-
[1] Zhang La-mei, Wang Xiao, Sun Liang-jie, et al.. Contextual sparse representation and its application in polarimetric SAR image classification[C]. IET International Radar Conference, Hangzhou, China, 2015: 1–5. [2] Shang Fang and Hirose A. Use of Poincare sphere parameters for fast supervised PolSAR land classification[C]. Proceedings of 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, VIC, 2013: 3175–3178. [3] Xie Wen, Jiao Li-cheng, and Zhao Jin. PolSAR image classification via D-KSVD and NSCT-Domain features extraction[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(2): 227–231. doi: 10.1109/LGRS.2015.2506718 [4] Kong J A, Swartz A A, Yueh H A, et al.. Identification of terrain cover using the optimum polarimetric classifier[J]. Journal of Electromagnetic Waves and Applications, 1988, 2(2): 171–194. [5] Silva W B, Freitas C C, Sant’Anna S J S, et al.. Classification of segments in PolSAR imagery by minimum stochastic distances between Wishart distributions[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(3): 1263–1273. doi: 10.1109/JSTARS.2013.2248132 [6] 孙即祥. 现代模式识别[M]. 长沙: 国防科技大学出版社, 2002: 385–447.Sun Ji-xiang. Modern Pattern Recognition[M]. Changsha: Press of National University of Defense Technology, 2002: 385–447. [7] Lee J S and Ainsworth T L. An overview of recent advances in Polarimetric SAR information extraction: Algorithms and applications[C]. Proceedings of 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, 2010: 851–854. [8] 钟平. 面向图像标记的随机场模型研究[D]. [博士论文], 国防科学技术大学, 2008.Zhong Ping. Random fields model for image label[D]. [Ph.D. dissertation], National University of Defense Technology, 2008. [9] Zhong Ping and Wang Run-sheng. A multiple conditional random fields ensemble model for urban area detection in remote sensing optical images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(12): 3978–3988. doi: 10.1109/TGRS.2007.907109 [10] Lafferty J, McCallum A, and Pereira F. Conditional random fields: Probabilistic models for segmenting and labeling sequence data[C]. Proceedings of the Eighteenth International Conference on Machine Learning, San Francisco, CA, USA, 2001: 282–289. [11] Kumar S and Hebert M. Discriminative random fields: A discriminative framework for contextual interaction in classification[C]. IEEE International Conference on Computer Vision, Piscataway, NJ, 2003: 1150–1157. [12] 吴立珍. 面向UAV战场感知的目标特征建模与应用研究[D]. [博士论文], 国防科学技术大学, 2012.Wu Li-zhen. Research on object feature modeling and applications for battlefield awareness of unmanned aerial vehicle[D]. [Ph.D. dissertation], National University of Defense Technology, 2012. [13] Pearl J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference[M]. California: Morgan Kaufmann, 1988: 247–289. [14] Wang Lei-guang, Dai Qin-ling, and Huang Xin. Spatial regularization of pixel-based classification maps by a two-step MRF method[C]. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Beijing, 2016: 2407–2410. [15] Zhong Yan-fei, Zhao Ji, and Zhang Liang-pei. A hybrid object-oriented conditional random field classification framework for high spatial resolution remote sensing imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(11): 7023–7037. doi: 10.1109/TGRS.2014.2306692 [16] Pieczynski W and Tebbache A N. Pairwise markov random fields and segmentation of textured images[J]. Machine Graphics and Vision, 2000, 9(3): 705–718. [17] Kumar S and Hebert M. A hierarchical field framework for unified context-based classification[C]. Proceedings of the Tenth IEEE International Conference on Computer Vision, Beijing, 2005: 1284–1291. [18] Jiang Wei, Chang S F, and Loui A C. Context-based concept fusion with boosted conditional random fields[C]. Proceedings of IEEE International Conference on Acoustics, Speech and Signal Processing, Honolulu, HI, 2007: I-949–I-952. [19] Lee C H, Schmidt M, Murtha A, et al.. Segmenting brain tumors with conditional random fields and support vector machines[C]. Proceedings of the First International Conference on Computer Vision for Biomedical Image Applications, Beijing, China, 2005: 469–478. [20] Do T M T and Artières T. Polynomial conditional random fields for signal processing[C]. Proceedings of the 2006 Conference on ECAI 2006: 17th European Conference on Artificial Intelligence, Riva del Garda, Italy, 2006: 797–798. [21] Du Pei-jun, Samat A, Waske B, et al.. Random forest and rotation forest for fully polarized SAR image classification using polarimetric and spatial features[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 105: 38–53. doi: 10.1016/j.isprsjprs.2015.03.002 [22] Zou Tong-yuan, Yang Wen, Dai Deng-xin, et al.. Polarimetric SAR image classification using multifeatures combination and extremely randomized clustering forests[J]. EURASIP Journal on Advances in Signal Processing, 2010, 2010: Article No. 4. [23] Freeman A and Durden S L. A three-component scattering model for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. doi: 10.1109/36.673687 [24] Haralick R M, Shanmugam K, and Dinstein I. Textural features for image classification[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1973, SMC-3(6): 610-621. doi: 10.1109/TSMC.1973.4309314 [25] Yamaguchi Y, Moriyama T, Ishido M, et al.. Four-component scattering model for polarimetric SAR image decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(8): 1699–1706. doi: 10.1109/TGRS.2005.852084 -








计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

