
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Three-Dimensional Precession Feature Extraction of Ballistic Targets Based on Narrowband Radar Network
-
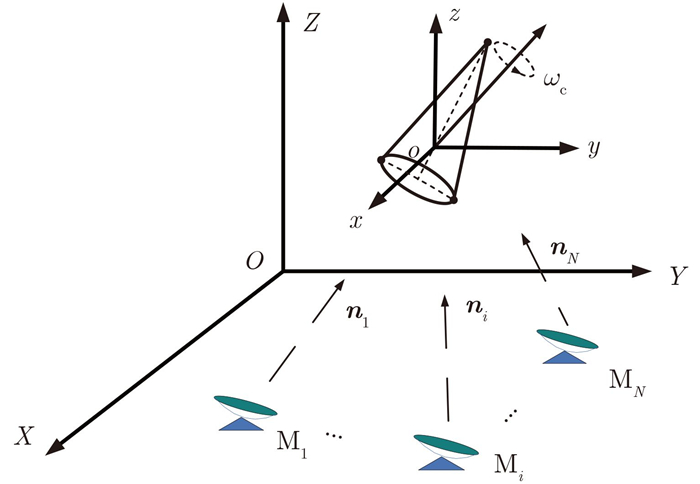
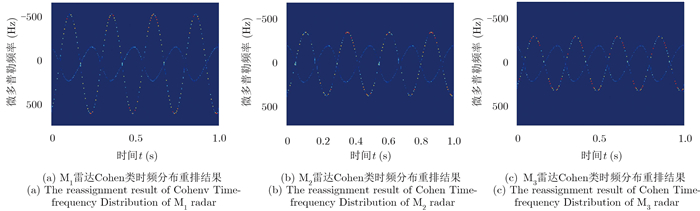
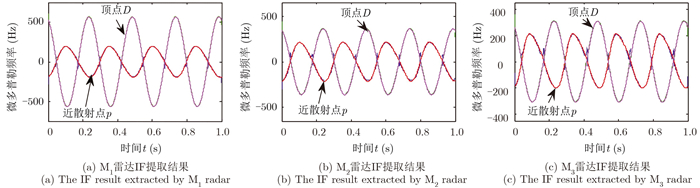
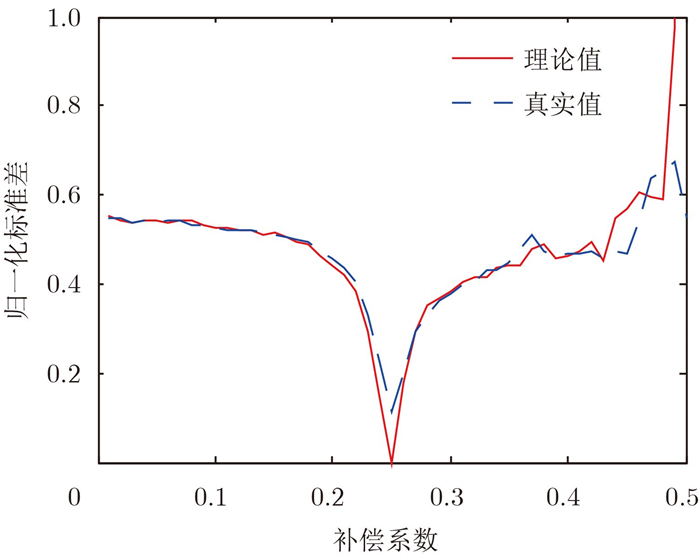
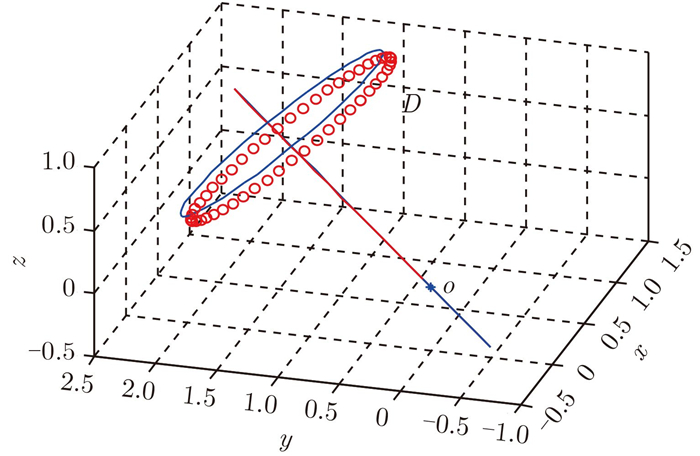
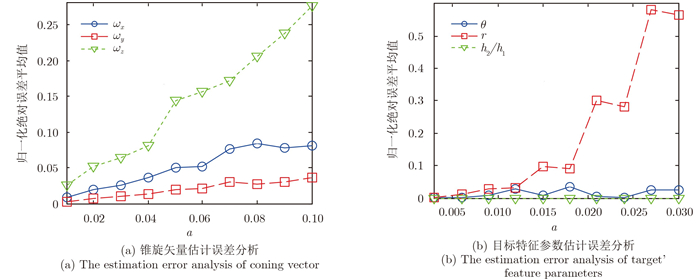
摘要: 微动特征是弹道目标识别的重要特征之一。针对单一视角观测难以获取目标真实微动参数的问题,该文提出了一种基于窄带雷达网的3维进动特征提取方法。首先建立了锥体目标进动模型,在考虑散射中心遮挡的前提下,详细分析了进动引发的微多普勒频率调制特性。然后基于锥顶微多普勒频率调制系数比,实现了不同视角下散射中心匹配关联,通过构建多视角联合方程组获取了目标的3维锥旋矢量,进而利用各散射中心微多普勒频率相关性,结合频率补偿的方法对锥体特征参数进行了提取,在此基础上解算出每一时刻锥顶坐标,实现了目标空间位置的3维重构。仿真结果证明了该方法的有效性与实用性。Abstract: Micro-motion is a crucial feature used in ballistic target recognition. To address the problem that single-view observations cannot extract true micro-motion parameters, we propose a novel algorithm based on the narrowband radar network to extract three-dimensional precession features. First, we construct a precession model of the cone-shaped target, and as a precondition, we consider the invisible problem of scattering centers. We then analyze in detail the micro-Doppler modulation trait caused by the precession. Then, we match each scattering center in different perspectives based on the ratio of the top scattering center's micro-Doppler frequency modulation coefficient and extract the 3D coning vector of the target by establishing associated multi-aspect equation systems. In addition, we estimate feature parameters by utilizing the correlation of the micro-Doppler frequency modulation coefficient of the three scattering centers combined with the frequency compensation method. We then calculate the coordinates of the conical point in each moment and reconstruct the 3D spatial portion. Finally, we provide simulation results to validate the proposed algorithm.
-
Key words:
- Precession feature /
- Narrowband radars /
- Frequency compensation /
- 3D reconstruction
-
表 1 锥体弹头进动及结构参数估计结果
Table 1. The estimation result of cone-shaped warhead's parameters
参数 理论值 估计值 相对误差 (%) α1(°) 70.7288 70.7025 0.30 α2(°) 36.8974 36.9851 0.037 α3(°) 30.8829 30.7848 0.32 θ(°) 13 13.5579 4.29 r(m) 0.5 0.5237 4.74 h1(m) 2.0 1.9132 4.43 h2(m) 0.5 0.4811 3.20  下载: 导出CSV
下载: 导出CSV
-
[1] Victoria S. American Missile Defense[M]. California:United States of America, 2010:44-78. [2] Chen V C. Advances in applications of radar micro-Doppler signatures[C]. 2014 IEEE Conference on Antenna Measurements & Application, Antibes, Juan-les-pins, 2014:1-4. [3] Wang Jun, Lei Peng, Sun Jin-ping, et al.. Spectral characteristics of mixed micro-Doppler time-frequency data sequences in micro-motion and inertial parameter estimation of radar targets[J]. IET Radar, Sonar & Navigation, 2014, 8(4):275-281. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=6825700&filter%3DAND%28p_IS_Number%3A6783560%29 [4] Smith G E, Woodbridge K, Baker C J, et al.. Multistatic micro-Doppler radar signatures of personnel targets[J]. IET Signal Processing, 2010, 4(3):224-233. doi: 10.1049/iet-spr.2009.0058 [5] 贺思三, 赵会宁, 冯存前.多视角距离像序列弹道目标的进动参数估计[J].信号处理, 2013, 29(8):1027-1035. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201308017.htmHe Si-san, Zhao Hui-ning, and Feng Cun-qian. Precession parameter estimation for ballistic targets based on multiaspect range-profile sequence[J]. Journal of Signal Processing, 2013, 29(8):1027-1035. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201308017.htm [6] Liu L H, McLernon D, Ghogho M, et al.. Ballistic missile detection via micro-Doppler frequency estimation from radar return[J]. Digital Signal Processing, 2012, 22(1):87-95. doi: 10.1016/j.dsp.2011.10.009 [7] 罗迎, 张群, 封同安, 等. OFD-LFM MIMO雷达中旋转目标微多普勒效应分析与三维微动特征提取[J].电子与信息学报, 2011, 33(1):8-13. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201101045.htmLuo Ying, Zhang Qun, Feng Tong-an, et al.. Micro-Doppler effect analysis of rotating target and three-dimensional micro-motion feature extraction in OFD-LFM MIMO radar[J]. Journal of Electronics & Information Technology, 2011, 33(1):8-13. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201101045.htm [8] 罗迎, 张群, 李松, 等.基于分布式组网雷达的弹道目标三维进动特征提取[J].电子学报, 2012, 40(6):1080-1085. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201206003.htmLuo Ying, Zhang Qun, Li Song, et al.. Three-dimensional precession feature extraction of ballistic targets in distributed radar networks[J]. Acta Electronica Sinica, 2012, 40(6):1080-1085. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201206003.htm [9] 雷腾, 刘进忙, 杨少春, 等.基于三站一维距离像融合的弹道目标特征提取方法研究[J].宇航学报, 2012, 33(2):228-234. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201202013.htmLei Teng, Liu Jin-mang, Yang Shao-chun, et al.. Study on feature extraction method of ballistic target based on threestation range profiles[J]. Journal of Astronautics, 2012, 33(2):228-234. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201202013.htm [10] 韩勋, 杜兰, 刘宏伟.基于窄带雷达组网的空间锥体目标特征提取方法[J].电子与信息学报, 2014, 36(12):2956-2962. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201412027.htmHan Xun, Du Lan, and Liu Hong-wei. Feature extraction of space cone-shaped target based on narrow-band radar networks[J]. Journal of Electronics & Information Technology, 2014, 36(12):2956-2962. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201412027.htm [11] 宁超, 黄璟, 黄培康.基于HRRP的进动锥体目标特征参数求解方法[J].系统工程与电子技术, 2014, 36(4):650-655. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201404008.htmNing Chao, Huang Jing, and Huang Pei-kang. Solution for characteristic parameters of precession cone-shaped target using HRRP[J]. Systems Engineering and Electronics, 2014, 36(4):650-655. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201404008.htm [12] Fang Hong-qing, Chen Long, and Raghavendiran Srinivasan. Influence of time and length size feature selections for human activity sequences recognition[J]. ISA Transactions, 2014, 53(1):134-140. doi: 10.1016/j.isatra.2013.09.001 [13] Li Po, Wang De-chun, and Wang Lu. Separation of microDoppler signals based on time frequency filter and Viterbi algorithm[J]. Signal, Image and Video Processing, 2013, 7(3):593-605. doi: 10.1007/s11760-011-0263-3 [14] 关永胜, 左群声, 刘宏伟.高噪声环境下微动多目标分辨[J].电子与信息学报, 2010, 32(11):2630-2635. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201011018.htmGuan Yong-sheng, Zuo Qun-sheng, and Liu Hong-wei. Micro-motion targets resolution in a high noise environment[J]. Journal of Electronics & Information Technology, 2010, 32(11):2630-2635. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201011018.htm [15] 王辉, 黄成军, 姚林朋, 等.重排Cohen类时频分布用于GIS局部放电声信号时频分析[J].高电压技术, 2010, 36(11):2724-2730. http://www.cnki.com.cn/Article/CJFDTOTAL-GDYJ201011020.htmWang Hui, Huang Chen-jun, Yao Lin-peng, et al.. Application of reassigned cohen class time-frequency distribution to the analysis of acoustic emission partial discharge signal for GIS[J]. High Voltage Engineering, 2010, 36(11):2724-2730. http://www.cnki.com.cn/Article/CJFDTOTAL-GDYJ201011020.htm [16] 葛哲生, 陈仲生. Matlab时频分析技术及其应用[M].北京:人民邮电出版社, 2006:107-112.Ge Zhe-sheng and Chen Zhong-sheng. Time-Frequency Analysis Techniques of Matlab and Its Application[M]. Beijing:Posts & Telecom Press, 2006:107-112. -


图(7) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

