
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work
图
1
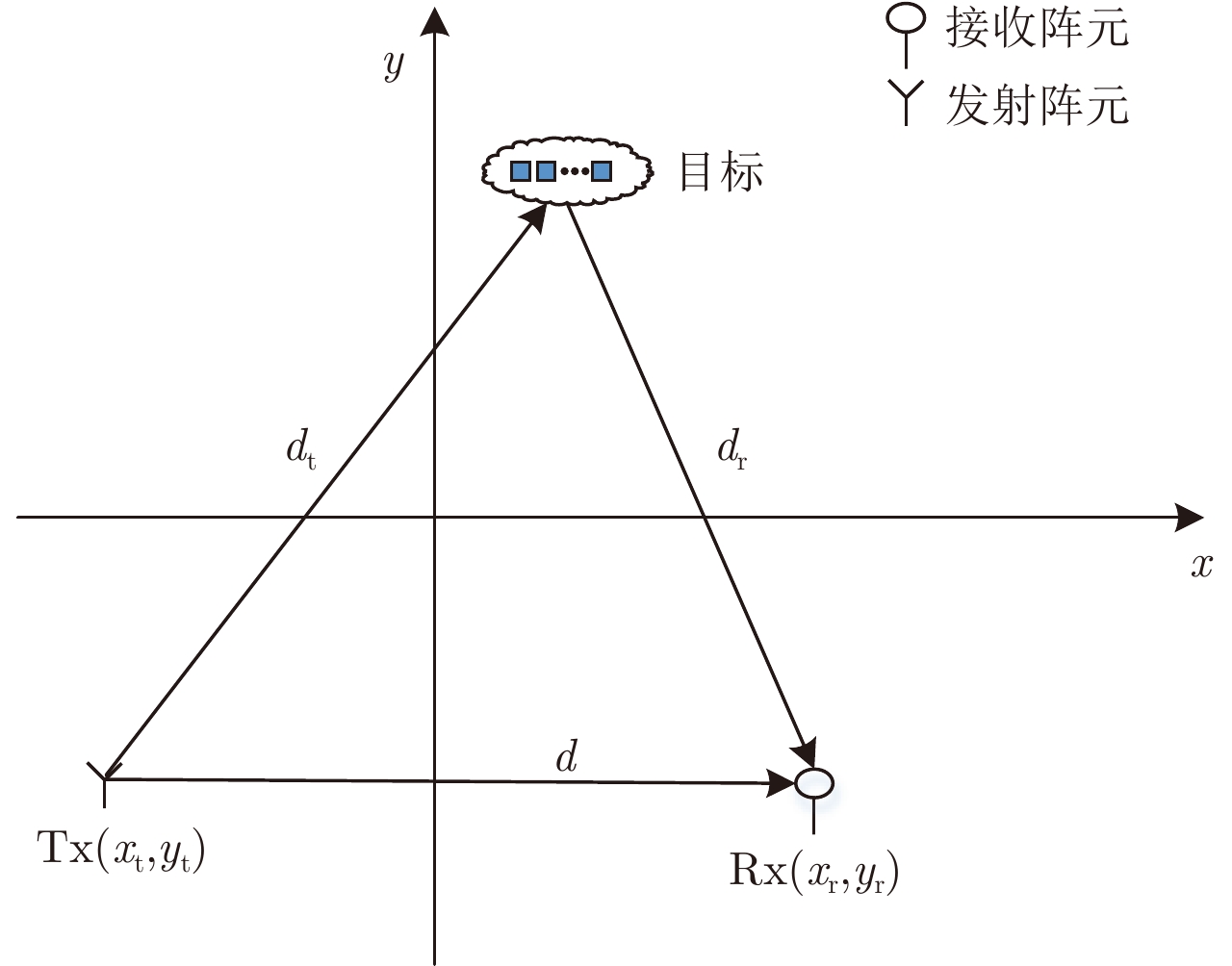
NPBR示意图
Figure
1.
Sketch map of NPBR
| Citation: | Ouyang-Cheng, Chen Xiao-xu, Hua Yun. Improved Best-fitting Gaussian Approximation PHD Filter[J]. Journal of Radars, 2013, 2(2): 239-246. doi: 10.3724/SP.J.1300.2013.13010

|
非合作无源双基地雷达(Non-cooperative Passive Bistatic Radar, NPBR)因具有造价低、抗截获、反隐身等诸多优势[1–6]而成为国内外研究热点。目前,NPBR研究的外辐射源信号主要包括通信电台信号、电视广播信号、手机信号以及雷达信号等。无论针对哪种外辐射源信号,在NPBR中,3大同步(包括空间同步、时间同步以及相位同步)问题始终是制约目标有效探测的关键问题。其中,空间同步是指接收和发射天线同时照射相同空域,空间同步关系到接收到的回波是否持续含有目标信息,即接收回波的有效性;时间同步是指接收天线必须准确获知发射天线发射波形时刻,时间同步关系到获取目标运动参数的准确性;相位同步是指发射和接收天线接收到的信号能够在长时间内严格相参,相位同步关系到目标相参积累性能,进而影响目标的探测性能。
本文基于雷达外辐射源信号模型,重点讨论与时间同步及相位同步相关的几个问题,具体包括,发射波形参数估计、直达波到达时间估计以及基于波形参数估计的长时间相参积累等问题。其中,发射波形参数估计主要包括脉冲宽度、脉冲重复间隔、载频、带宽等脉间捷变的参数估计。基于估计的波形参数值,进一步给出了捷变波形的GRFT (Generalized Radon Fourier Transform)长时间相参积累弱目标探测算法,最后通过数值实验验证了本文算法的有效性。
本文内容安排如下:第1节简单介绍了NPBR研究现状及存在的关键问题,明确了本文研究范畴;第2节建立了雷达外辐射源信号模型,给出了基于直达波的NPBR参数估计方法,并提出了一种鲁棒性高的脉冲提取方法;第3节给出了基于GRFT的捷变波形长时间积累算法;第4节利用实测数据对本文算法进行了验证;最后对本文内容进行了总结。
图1给出了NPBR工作示意图。NPBR接收的信号主要包括两个部分:(1)直接接收到的辐射源旁瓣信号,称为直达波信号;(2)目标前向散射的回波信号。NPBR合理布设的情况下,直达波信号信噪比将远大于目标回波信噪比,十分有利于发射波形参数的估计。因此,本文将基于直达波信号对辐射源发射波形及波达时间等参数进行估计。
设外辐射源发射如式(1)所示的LFM脉冲串信号,脉冲串信号脉冲重复间隔、脉宽、载频及带宽均为脉间捷变。
| s(τ,n)=Arect(τTp(n))exp{jπ(2fc(n)τ+γ(n)τ2)}, n=0,1,···,N−1 | (1) |
式中, τ为快时间,A为幅度,N为脉冲数, Tp(n)为脉冲宽度, fc(n)为载频, γ(n)=Bs(n)/Tp(n)为调频率, Bs(n)为信号带宽,n为脉冲序号。则直达波信号模型可写为:
| sr(τ,n)=A1rect(τ−τ0Tp(n))exp{−j2πfc(n)τ0}⋅exp{jπ[2fI(n)τ+γ(n)(τ−τ0)2]} | (2) |
式中, τ0=2d0/c为直达波波达时间,d0为外辐射源与接收天线之间的距离, fI(n)=fc(n)−fdown为中频频率, fdown为下变频参考频率。
显然,式(2)中 τ0, Tp(n), γ(n)以及 fc(n)为待估计的未知参数。
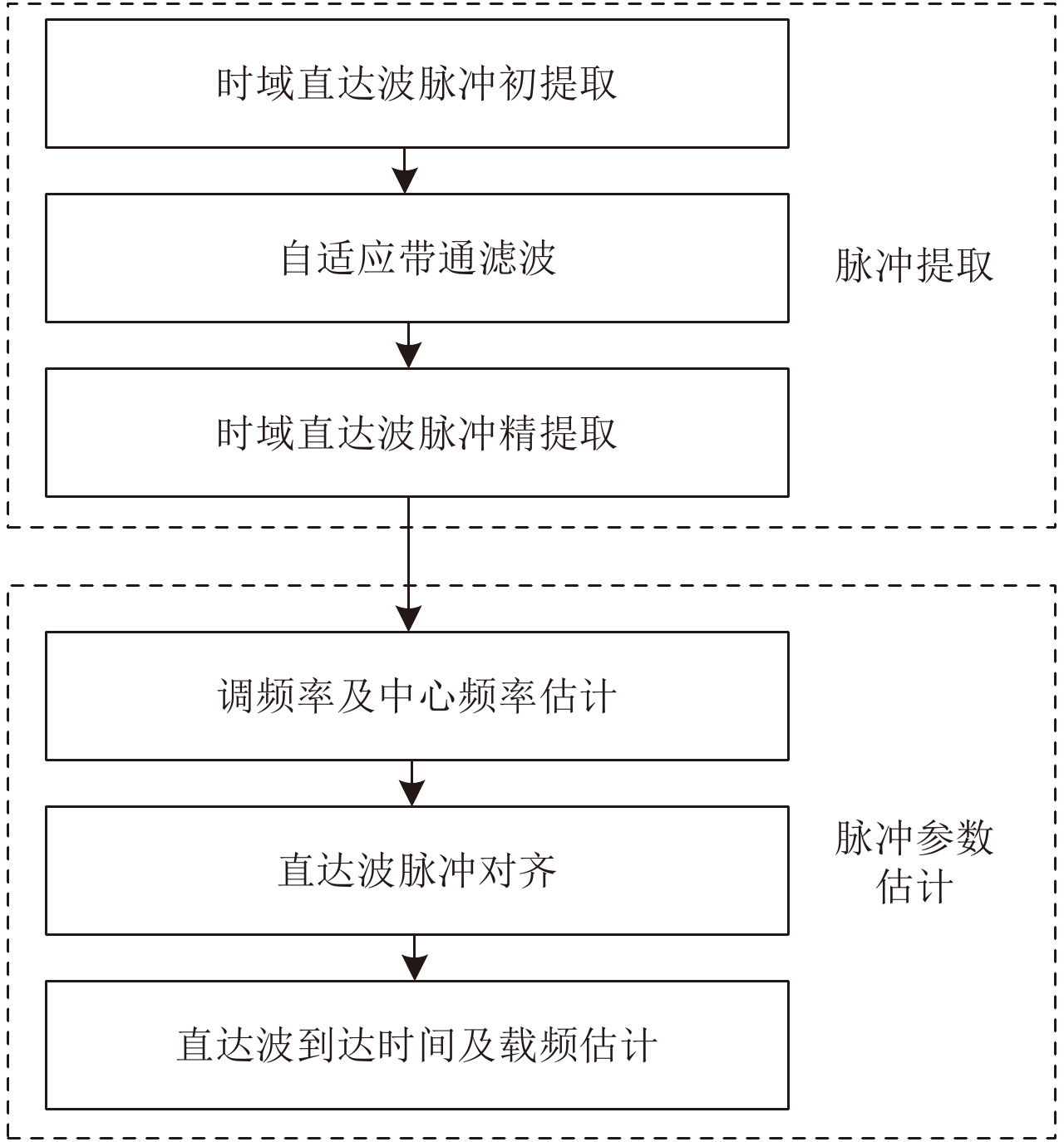
根据待估计参数,可将直达波参数估计过程分为如图2所示的两个部分:脉冲提取和脉冲参数估计。
2.2.1 脉冲提取 脉冲提取通常分为3个步骤,包括时域直达波初提取、自适应带通滤波以及时域直达波脉冲精提取。直达波信号中,通常可能包含大量同频段电台、通信等干扰成分,因此原始直达波信号在时域进行脉冲提取误差较大,需要在初提取的基础上进行带通滤波。而由于直达波信号中心频率、带宽未知,因此无法直接设计带通滤波器。考虑到LFM信号频率响应近似为矩形,本文采用通过脉冲提取方法提取信号的频率响应,从而获得信号中心频率与带宽,进而设计带通滤波器滤除直达波干扰信号。因此,脉冲提取方法的性能决定了直达波脉冲提取的效果。
脉冲串波形信息主要包含脉冲的上升沿、下降沿以及脉内调制信息。直达波脉冲提取可以等效于直达波脉冲的上升沿以及下降沿的提取。为此,本小节给出一种高鲁棒性的脉冲提取方法,该方法基本主要步骤包括:
步骤1 自适应计算噪声阈值门限,对超过噪声阈值门限的信号样本索引号进行差分处理;
步骤2 提取差分值大于最小脉冲间距的索引号作为预选上升沿;
步骤3 将信号序列翻转,用相同的差分处理方法以及信号序列翻转前后的对应关系获得预选下降沿。上升沿与下降沿一一对应,组成预选脉冲;
步骤4 从预选脉冲中剔除不符合预设脉冲条件的脉冲,将剩余脉冲作为最终提取结果。
通常,噪声采样幅值无法连续超过噪声门限,因此无法形成与直达波脉冲宽度和脉冲重复间隔等特征相近的脉冲。本质上,该方法正是利用了噪声与直达波脉冲的这种特征区别,因此具有较好的鲁棒性。
2.2.2 脉冲参数估计 图2中,脉冲参数估计部分包括以下几个步骤:调频率和中心频率的估计、直达波脉冲对齐、直达波波达时间及载频估计。
在2.2.1小节脉冲提取的基础上,可以获得直达波信号的脉冲宽度及脉冲重复间隔。本小节针对提取的任意脉冲,给出脉内调制信息的提取方法。
(a) 调频率和中心频率的估计
每个提取的脉冲信号均为一个LFM信号,对于LFM信号的调频率及中心频率的估计方法较多。例如LvD[7,8], GRFT[9–11]等。考虑到GRFT参数估计的最优性[12,13],这里采用GRFT对LFM信号进行参数估计。设定中心频率范围为 ˜fk∈[fmin,fmax]及调频率范围为 ˜γl=[γmin,γmax],则中心频率及调频率估计值可由式(3)得到。式(3)中,L和K分别为中心频率和调频率搜索点数, spulse(τ,n)为提取的第n个脉冲信号。
| [˜fI(n),˜γ(n)] =argmax˜fk,˜γl{L∑l=1K∑k=1spulse(τ,n) ⋅exp{−jπ[2˜fkτ+˜γlτ2]}} =argmax˜fk,˜γl{L∑l=1K∑k=1˜Aexp{jπ[2(fI(n)−˜fk)τ +(γ(n)−˜γl)τ2]}} | (3) |
式(3)中, ˜A为与 τ无关的复幅度。在实际中,由于提取脉冲的上升沿和下降沿可能存在较大误差,导致中心载频的估计值 ˜fI(n)与真实估计值存在一个不可忽略的偏差,记为 Δf(n),即 ˜fI(n)=fI(n)− Δf(n)。中心频率偏差将在后续脉压中产生峰值位置的偏移。
(b) 直达波脉冲对齐
利用获取的脉冲宽度、中心频率以及调频率,可构建如式(4)所示的参考信号,并对式(2)所示的直达波脉冲信号进行脉冲压缩。脉压结果如式(5)所示。
| sref(τ,n)=rect(τ˜Tp(n))⋅exp{jπ[2˜fI(n)τ+˜γ(n)τ2]} | (4) |
| sPC(τ,n) =sr(τ,n)⊗s∗ref(τ,n) =A1exp{−j2πτ0fc(n)} ⋅∫∞−∞rect(u−τ0Tp(n))rect(τ−u˜Tp(n)) ⋅exp{jπ[2fI(n)u+γ(n)(u−τ0)2]} ⋅exp{−jπ[2˜fI(n)(τ−u)+˜γ(n)(τ−u)2]}du ≈rect(τ+Tp(n)/2−τ0˜Tp(n)) ⋅exp{jπ[(τ+τ0)Δf(n)−2τ0fc(n)]} ⋅sinc{(τ−τ0+˜Tp(n))π˜γ(n)[τ−τ0+Δτ0(n)]} | (5) |
式(5)中,
| Δτ0(n)=Δf(n)/˜γ(n) | (6) |
显然,由于中心频率估计误差 Δf(n)的存在,脉压后,峰值位置存在一个与脉冲号相关偏移量 Δτ0(n),即不同脉冲的峰值位置处于不同距离单元。利用式(6)中不同脉冲峰值的位置偏移与频率估计误差之间的关系,可实现脉冲间相对频率估计误差的补偿,并实现脉冲对齐。记各脉冲与第1个脉冲的峰值偏差为:
| Δτr(n)=Δτ0(n)−Δτ0(0) | (7) |
由式(7),定义相对频率偏差为:
| Δfr(n)=Δτr(n)˜γ(n) | (8) |
重新构建脉压匹配函数为:
| ˆsref(τ,n)=rect(τ˜Tp(n))⋅exp{jπ{2[˜fI(n)−Δfr(n)]τ+˜γ(n)τ2}} | (9) |
则脉压结果更新为:
| s′PC(τ,n) =sr(τ,n)⊗ˆs∗ref(τ,n) ≈A0rect(τ+Tp(n)/2−τ0˜Tp(n)) ⋅exp{jπ[(τ+τ0)Δf(0)−2τ0fc(n)]} ⋅sinc{(τ−τ0+˜Tp(n))π˜γ(n)[τ−τ0+Δτ0(0)]} | (10) |
由式(10)可知,脉冲峰值位置均为:
| τ=τpeak=τ0−Δτ0(0) | (11) |
显然,与脉冲号无关,实现了脉冲对齐。
(c) 直达波波达时间及载频估计
由式(7)和式(8)可知
| Δfr(n)=(Δτ0(n)−Δτ0(0))˜γ(n)=Δf(n)−Δτ0(0)˜γ(n)=Δf(n)−Δf(0)˜γ(n)/˜γ(0) | (12) |
将式(12)代入式(10)中相位项,得到
| ˆϕ(n,τpeak) =exp{jπ[(τpeak+τ0)Δf(0)−2τ0fc(n)]} =exp{jπ{(2τpeak+Δf(0)/˜γ(0))Δf(0) −2(τpeak+Δf(0)/˜γ(0)) ⋅[fdown+˜fI(n)−Δfr(n)+Δf(0)˜γ(n)/˜γ(0)]}} | (13) |
因此,利用式(14)可以得到第1个脉冲的中心频率误差的估计值。
| Δ˜f(0)=argmaxΔfkN−1∑n=0sMF(τpeak,n)⋅exp{−jπ{(2τpeak+Δfk/˜γ(0))⋅Δfk+2(τpeak+Δfk/˜γ(0))⋅[fdown+˜fI(n)−Δfr(n)+Δfk˜γ(n)/˜γ(0)]}} | (14) |
式中,搜索频率 Δfk∈[Δfkmin,Δfkmax], Δfkmin和 Δfkmax为搜索最小值和最大值。
进而得到直达波到达时间为:
| τ0=τpeak+Δτ0(0)=τpeak+Δ˜f(0)/˜γ(0) | (15) |
中心频率估计值更新为:
| ˜f′I(n)=˜fI(n)−Δ˜f(n)=˜fI(n)−(Δ˜f(0)/˜γ(0)+Δτr(n))˜γ(n) | (16) |
进一步可以得到各脉冲的载频估计值为:
| ˜fc(n)=fdown+˜f′I(n) | (17) |
至此,外辐射源发射信号的脉冲重复频率、脉冲宽度、调频率、载频以及直达波达到时间均已获得,为脉间相参积累奠定基础。
通过直达波的处理,可获得外辐射源信号的参数,并将获得的参数估计值代入式(4)可得到重构的脉压参考函数。利用该参考函数,对特定距离门内的回波进行脉压,得到脉压后距离-脉冲维结果。在此基础上,沿脉冲维进行捷变波形的长时间积累技术。目标回波时延为 τd(n)=2r(n)/c,式中,c为光速, r(n)为目标瞬时斜距,且
| r(n)=r0+v0n∑n′=0Tr(n′)+a02(n∑n′=0Tr(n′))2 | (18) |
式中,r0为初始斜距,v0为径向速度,a0为径向加速度。
结合式(1),目标回波可以写为:
| secho(τ,n)=A2rect(τ−τ0Tp(n))⋅exp{−j2πfc(n)τd(n)}⋅exp{jπ[2fI(n)τ+γ(n)(τ−τd(n))2]} | (19) |
式中,A2为回波幅度。
用 ˜f′I(n)替换式(4)所示参考函数的 ˜fI(n),利用更新后的参考函数对式(19)进行脉压,得到
| sPC_echo(τ,n) =secho(τ,n)⊗s∗ref(τ,n) ≈A2rect(τ−τd(n)2˜Tp(n))exp{−j2πτd(n)fc(n)} ⋅sinc{π(˜Tp(n)−|τ−τd(n)|)˜γ(n)(τ−τd(n))} | (20) |
基于式(20),可得到运动参数空间中,相参积累的结果为:
| G(i,j,k)=N−1∑n=0sPC_echo(τ(ri,vj,ak;n),n)⋅exp{j2πτ(ri,vj,ak;n)˜fc(n)} | (21) |
式中,ri, vj, ak分别为搜索的距离、速度和加速度值,且
| τ(ri,vj,ak;n) =2c[ri+vin∑n′=0Tr(n′)+ai2(n∑n′=0Tr(n′))2] | (22) |
式(21)实际上为文献[9–12]中GRFT的一种特殊形式。值得注意的是,式(20)中的脉压输出波形在脉冲间可以是捷变的,因此,其盲速旁瓣[10]等积累性能与非捷变信号GRFT结果将会有较大区别,篇幅原因,本文不进行讨论。
当 τ(ri,vj,ak;n)=τd(n)时,式(18)得到峰值:
| G(i,j,k)max=A2N | (23) |
即实现了积累增益随脉冲数增加而线性增加的相参积累结果。将式(21)中得到的积累幅值与恒虚警(Constant False Alarm Rate, CFAR)门限进行比较,即可得到最终检测结果。
对于功率为 σ2的高斯白噪声背景,N个脉冲相参积累后的噪声输出功率为 Nσ2[9],因此,相参积累的输出信噪比为 NA22/σ2,即为积累前信噪比的N倍。另外,本文方法对输入信噪比的要求与积累脉冲数及检测门限相关。在检测门限一定的条件下,目标回波信噪比越小,所需的积累脉冲数越多,进而所需的波束驻留时间也越长。
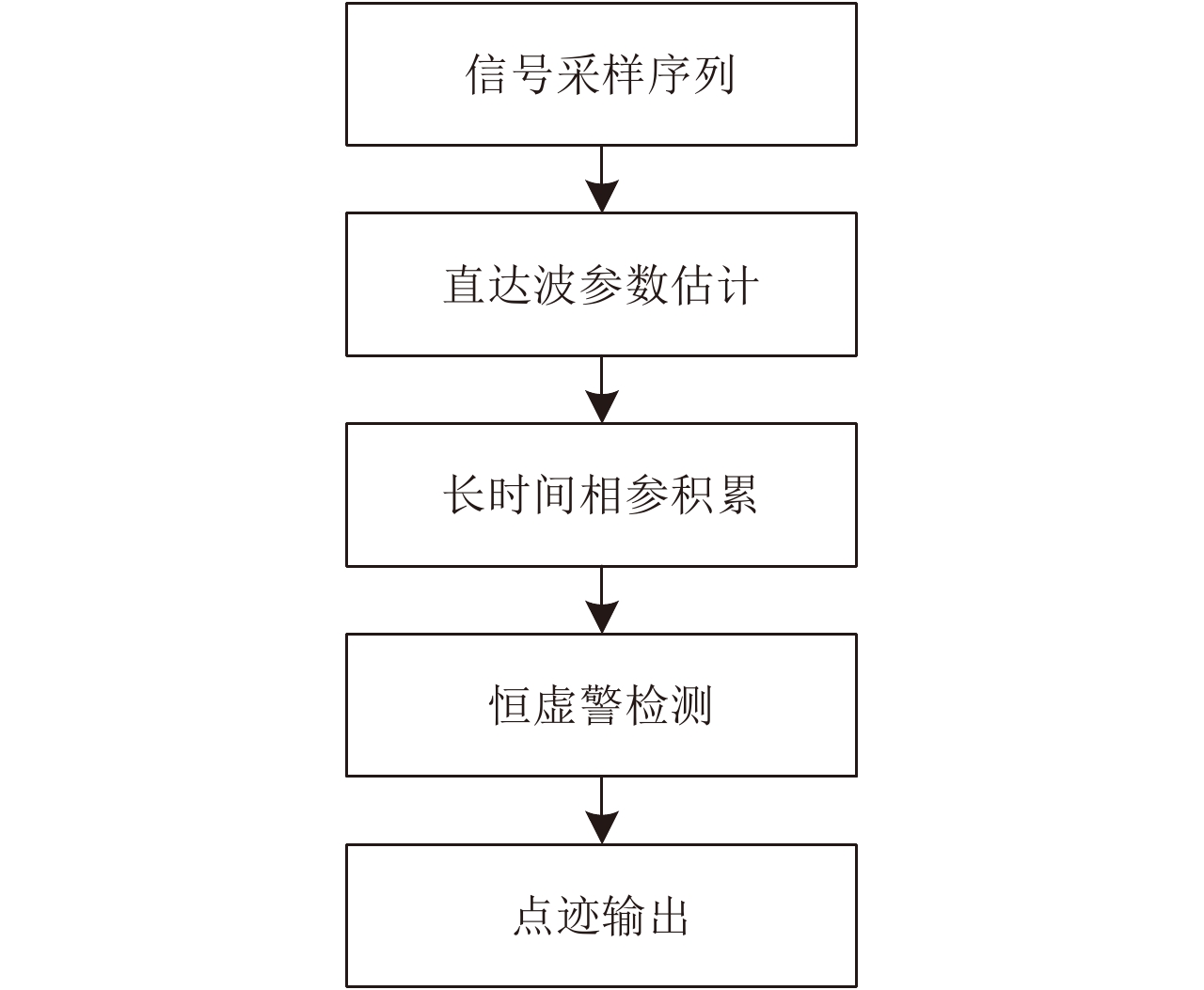
本文总体算法处理流程如图3所示。
本小节将利用仿真和实测数据实验对所提方法进行验证。
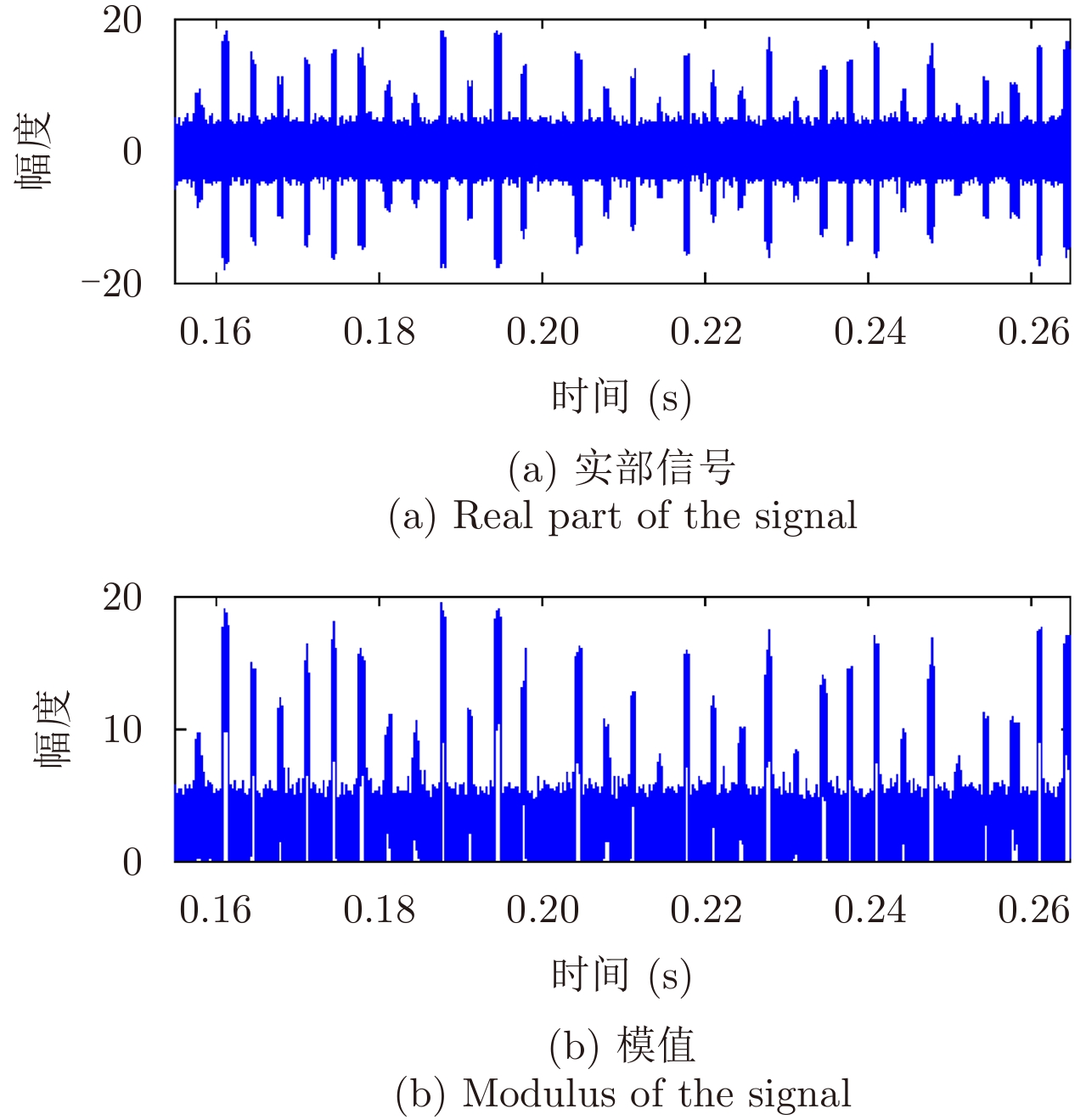
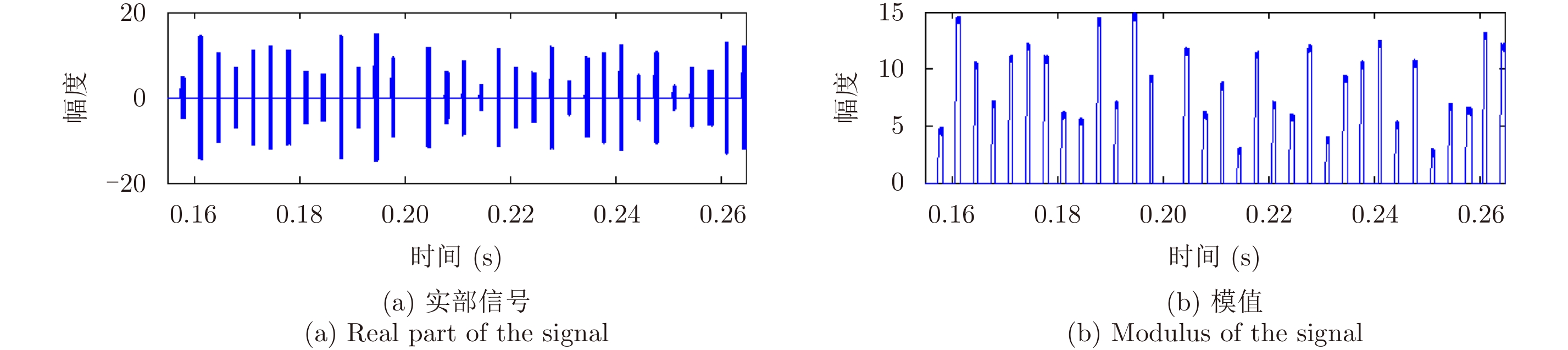
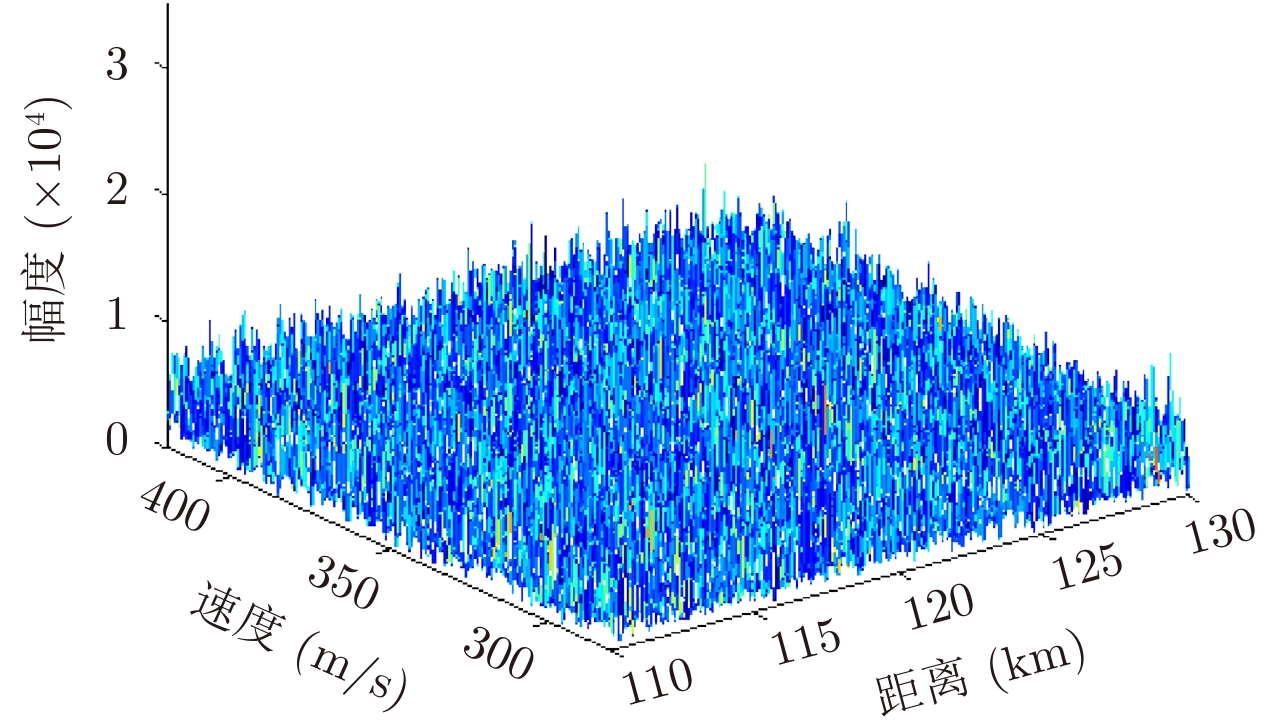
仿真实验中,外辐射源雷达工作在P波段,发射波形脉宽、时宽及带宽脉间捷变,场景中存在一个微弱目标,脉压后信噪比为0,运动参数为(120 km, 350 m/s, 20 m/s2),积累脉冲数为100。部分原始回波实部信号和模值如图4所示。图5为直达波提取结果,该结果验证了本文脉冲提取方法的有效性。图6为目标回波脉压结果。显然,脉压结果中,目标淹没在噪声中。利用动目标检测(Moving Target Detection, MTD)方法,得到结果如图7所示,利用本文长时间积累方法,得到结果如图8所示。显然,通过时间和相位同步,利用本文的波形捷变GRFT方法能够将目标能量有效积累,进而验证了本文算法的有效性。
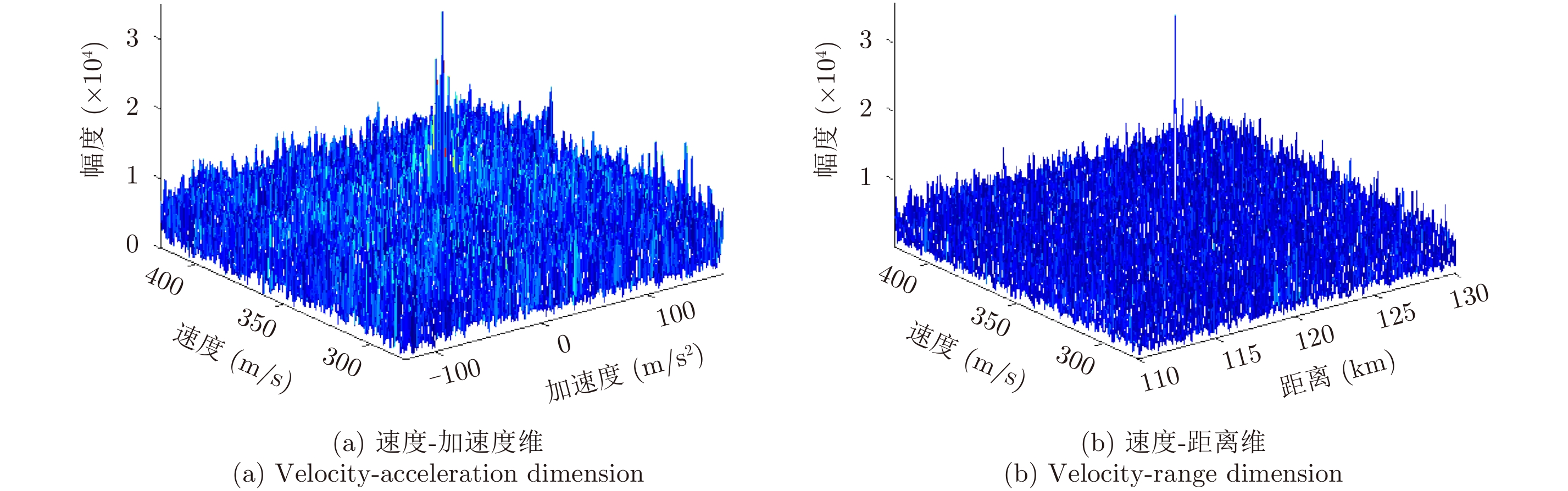
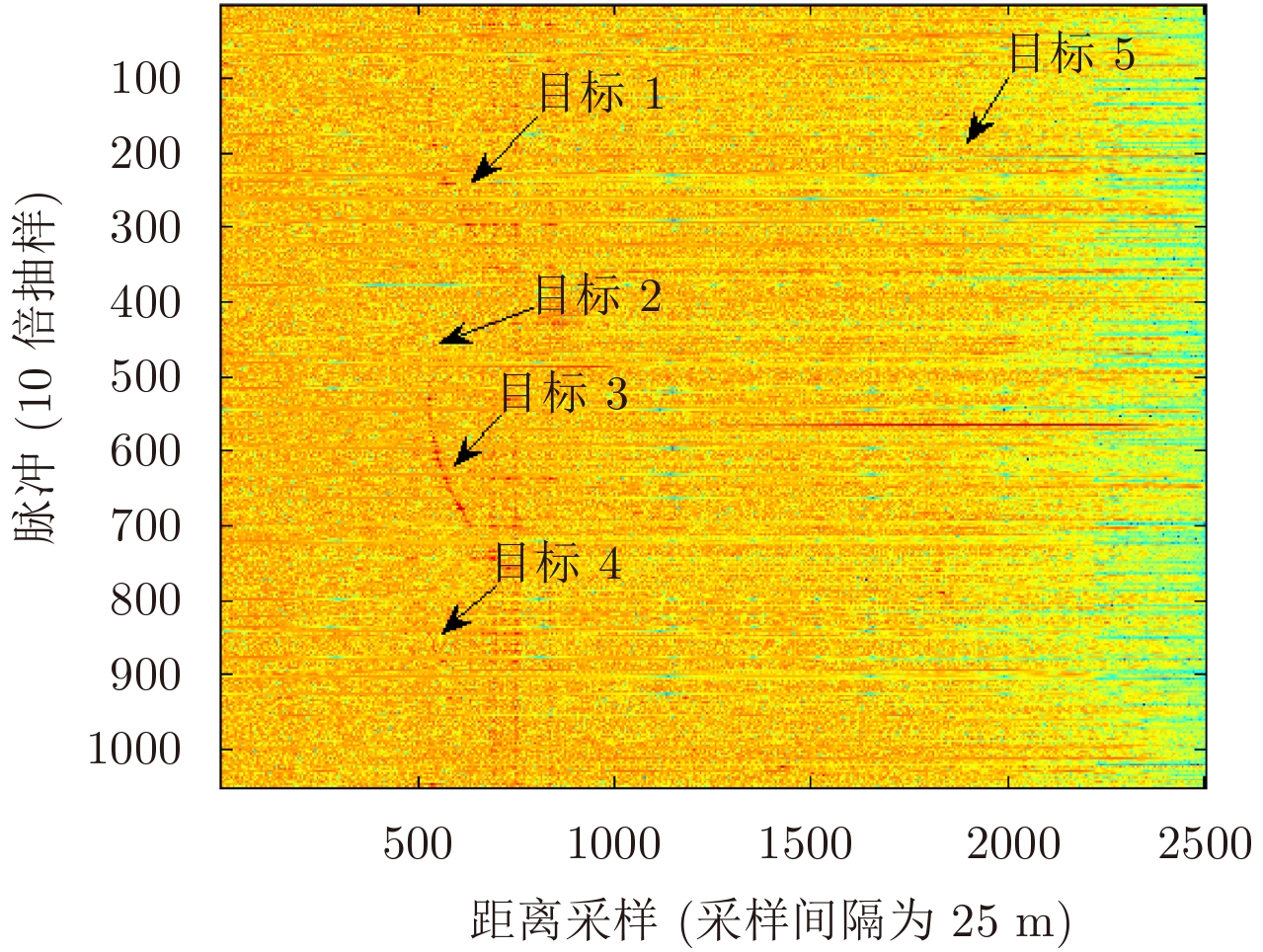
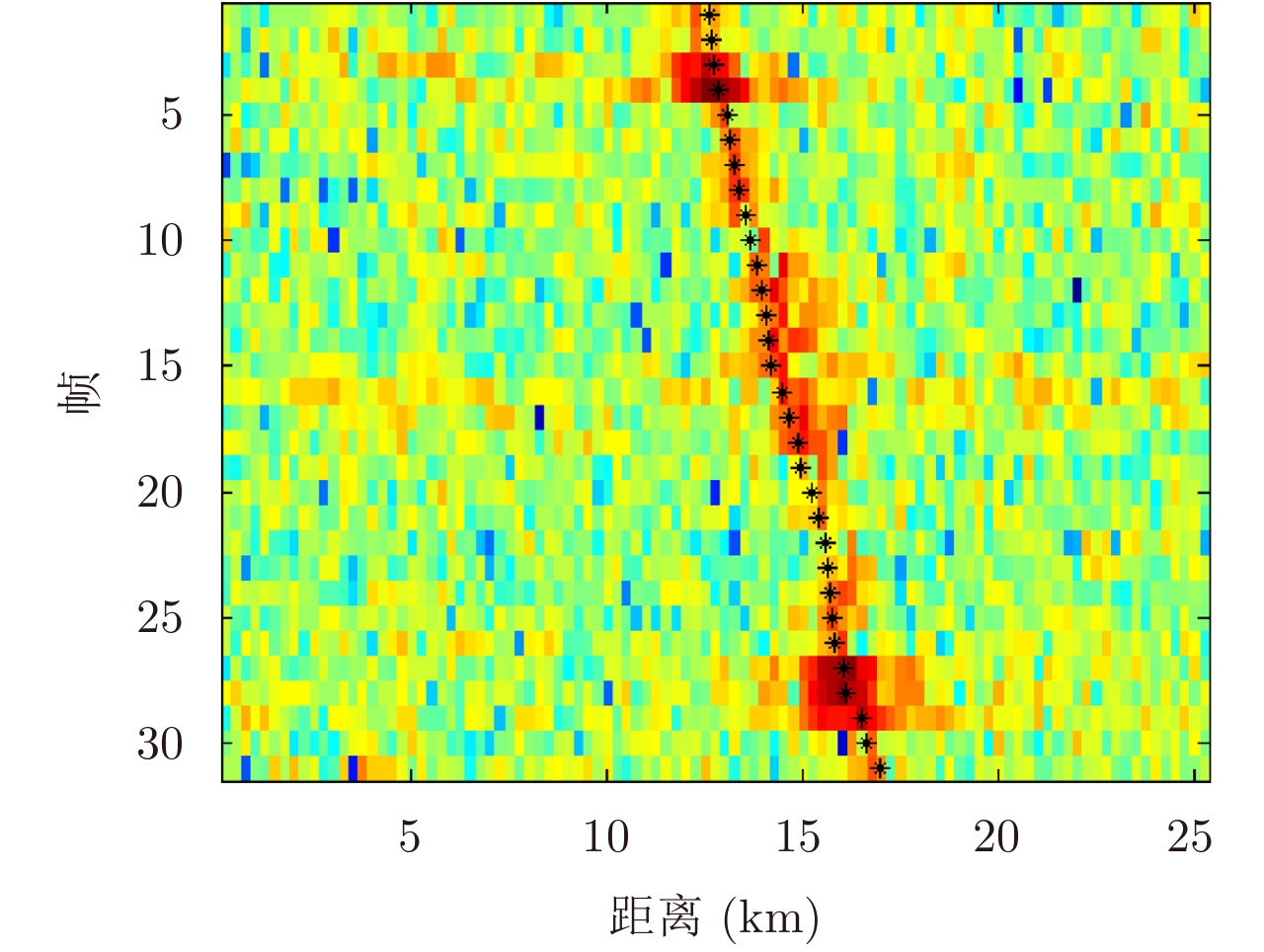
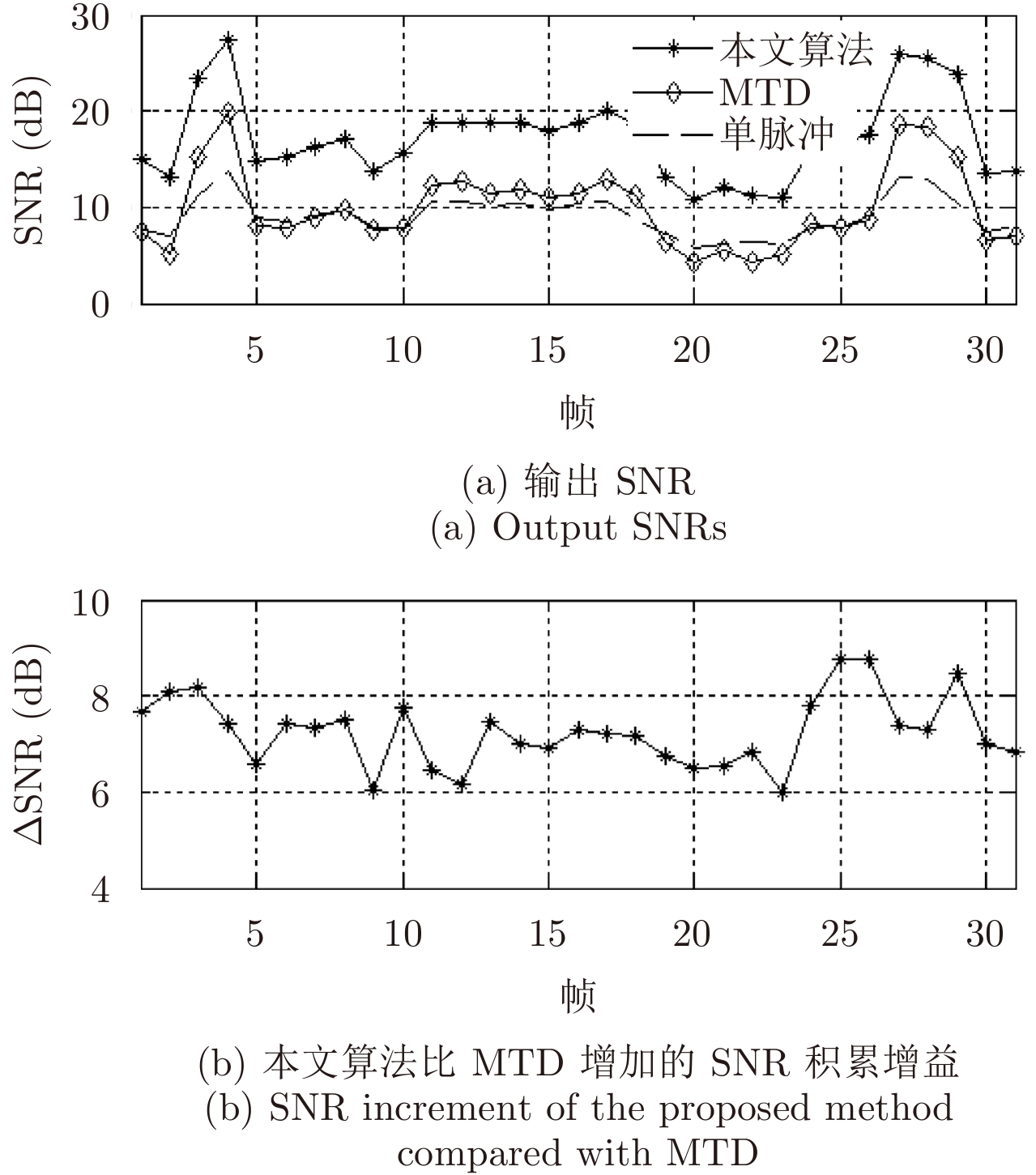
实测数据实验中,外辐射源雷达工作在P波段,发射波形脉宽、时宽及带宽脉间捷变。图9为回波脉压结果,从脉压结果可以看出,场景中存在多个微弱目标,而且在观测时间内,目标存在明显跨距离单元现象。针对图9中弱目标1进行捷变波形GRFT长时间积累,得到目标检测及跟踪结果如图10所示。处理中,每一帧的积累脉冲数为20,平均积累时间约为0.42 s,帧间滑动步长为10个脉冲。图11给出了基于本文算法的相参积累与常规MTD、单脉冲处理的信噪比结果对比。由于目标存在跨距离单元现象,在相同积累脉冲数情况下,本文相参积累性能显著高于常规MTD。
实验结果表明,利用本文的基于直达波的外辐射源波形估计方法以及捷变波形GRFT相参积累方法,能够将长时间观测的目标回波能量有效积累。
本文针对非合作外辐射源双基地雷达中时间和相位同步问题以及捷变波形的长时间相参积累问题进行了研究。给出了一种直达波脉冲提取方法,并利用直达波参数估计实现了时间和相位同步,在此基础上,进一步给出了波形捷变GRFT长时间相参积累方法,通过仿真和实测数据实验,验证了该方法对微弱目标探测的有效性。
直达波信噪比大小会影响波形参数估计误差,该信噪比越小,波形参数估计误差越大,进而长时间积累性能也越差。估计误差对目标参数测量及相参积累性能的分析将在后续工作中进行定量分析。另外,后续将对双基地目标运动参数的解算、捷变波形GRFT的相参积累性能及其盲速旁瓣特性等方面内容开展研究。
| 1. | 郁成阳,周婉婷,徐海洲,刘磊,杨君. 非合作式双基地雷达系统设计与验证. 雷达科学与技术. 2024(02): 119-125 .  | |
| 2. | 吕敏,孙清洋,刘乐. 基于非合作雷达的外源雷达直达波参数提取方法. 电子技术与软件工程. 2023(04): 64-69 . | |
| 3. | 庄敬敏,宋杰,熊伟,王中训. 非合作辐射源双基地雷达技术综述. 探测与控制学报. 2023(04): 35-45+69 . | |
| 4. | 蒋威,马超,郑园园,曹健. 基于高频外辐射信号的探测效能评估研究. 电子技术与软件工程. 2022(14): 88-93 . | |
| 5. | 裴家正,黄勇,陈宝欣,关键,蔡咪,陈小龙. 联合脉压与Radon傅里叶变换的长时间相参积累方法. 雷达学报. 2021(06): 956-969 .  本站查看 本站查看 | |
| 6. | 朱拥建,刘远,石林艳,王宏. 非合作侦察定位系统的关键技术. 太赫兹科学与电子信息学报. 2018(03): 452-457 . |
京ICP备20021838号-8
Supported by: Beijing Renhe Information Technology Co. Ltd

Qian Lichang, Xu Jia, Hu Guoxu. Long-time Integration of a Multi-waveform for Weak Target Detection in Non-cooperative Passive Bistatic Radar[J]. Journal of Radars, 2017, 6(3): 259-266. doi: 10.12000/JR16137
 下载:
下载:




 DownLoad:
DownLoad: