
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | ZHAO Yingjian, JIANG Libing, ZHENG Shuyu, et al. Adaptive PHD-BOF: A slow-moving targets tracking method with air surveillance radar[J]. Journal of Radars, 2026, 15(2): 605–619. doi: 10.12000/JR25081

|
Adaptive PHD-BOF: A Slow-moving Targets Tracking Method with Air Surveillance Radar
DOI: 10.12000/JR25081 CSTR: 32380.14.JR25081
More Information-
Abstract
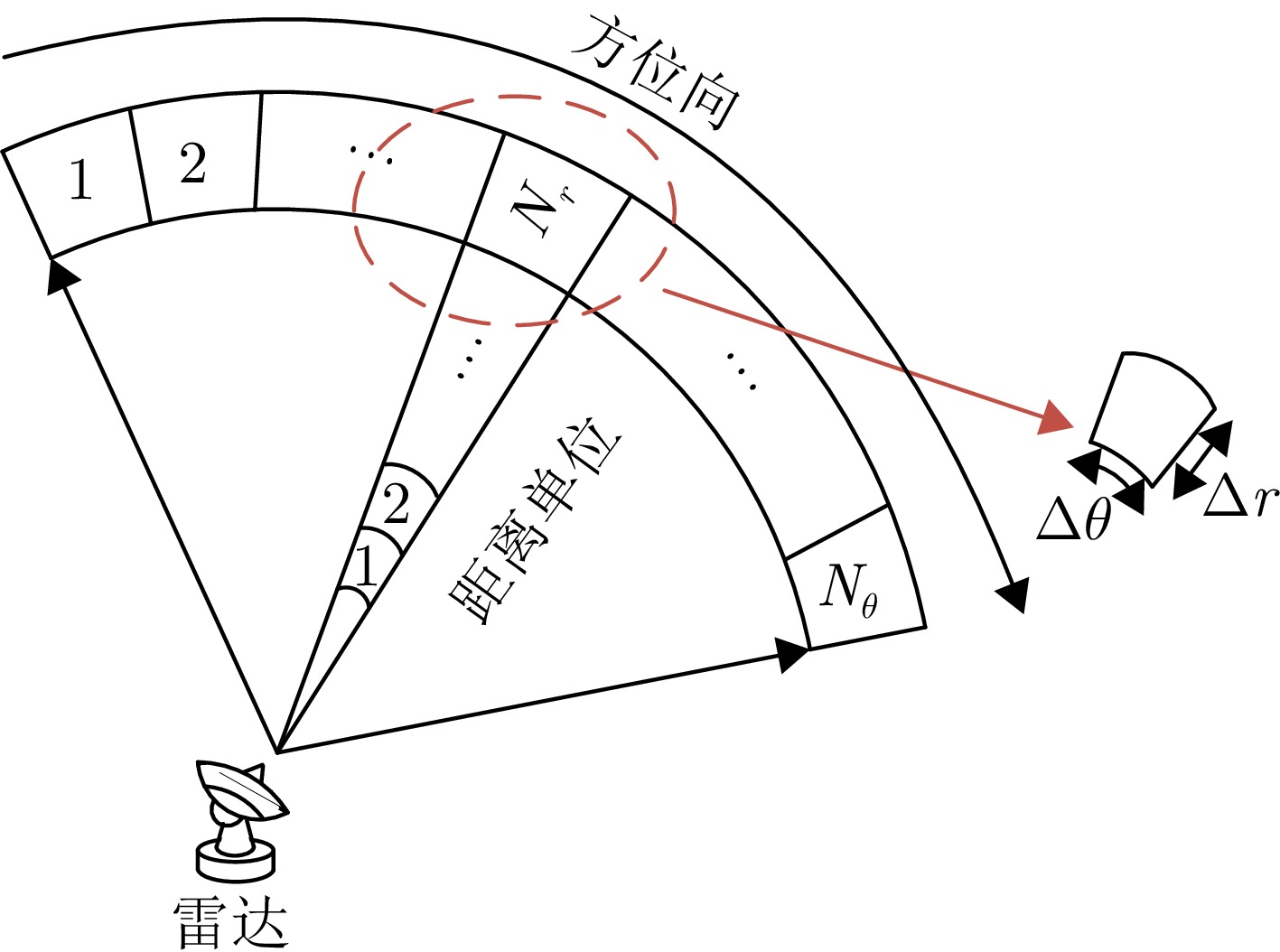
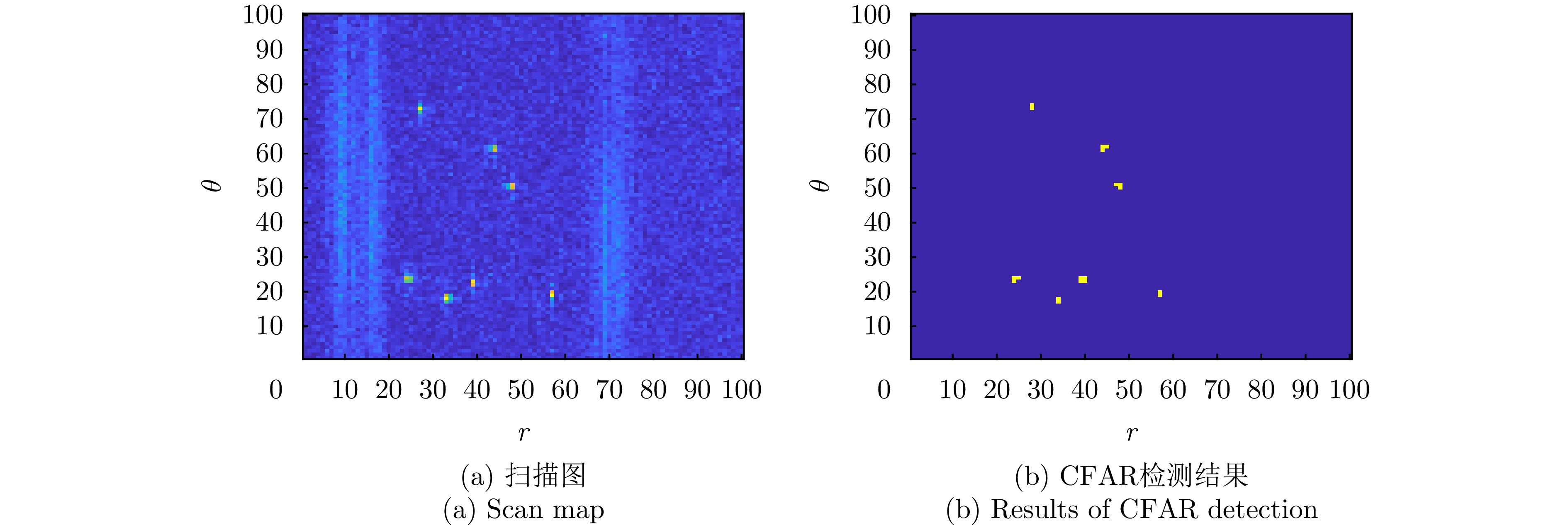
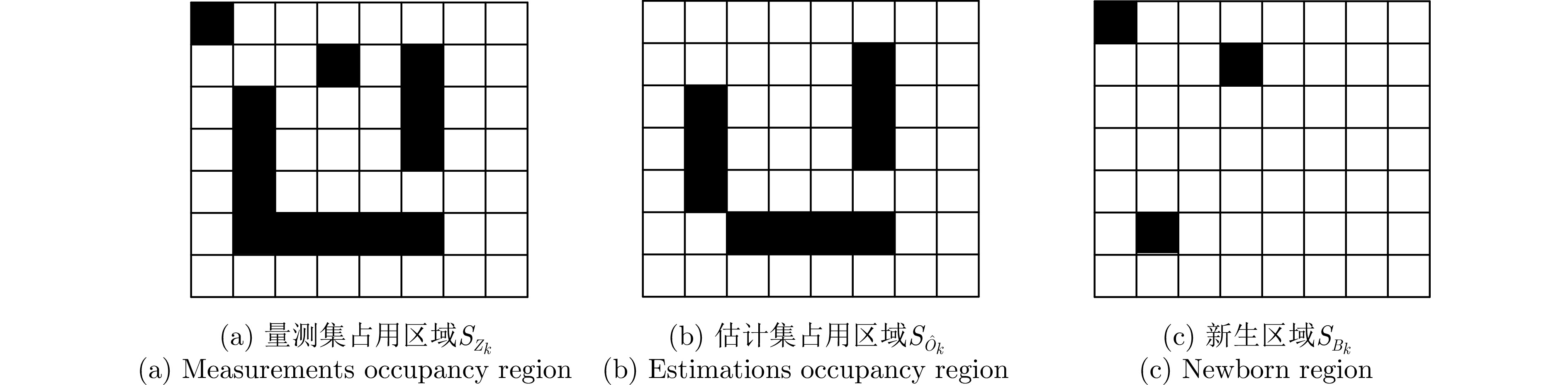
Low-altitude targets, represented by rotor unmanned aerial vehicles, can typically adopt a slow-cruise mode. As a result, their echoes fall within the Doppler Blind Zone (DBZ) and evade radar detection and tracking. The cluttered low-altitude environment adds to further complexity. To address this issue, this study proposes a method grounded in the framework of random finite set and designed for tracking slow-moving targets with a low-altitude surveillance radar. Inspired by the Bayesian occupancy filter, the proposed method initially models the radar Field of View (FoV) as a grid map. It is uniformly partitioned along the angle-range axis, ensuring that each cell captures a specific segment of the FoV. Then, adaptive filtering parameter modules are meticulously designed by leveraging the distinct dynamic characteristics of slow-moving targets and ground clutter. Subsequently, a probability hypothesis density filter is deployed to conduct unified filtering on the grid map situated within the DBZ. The final step involves the use of clustering methods to extract information about the target of interest. Simulation results validate the effectiveness, robustness, and superior performance of the proposed method across typical surveillance scenarios involving multiple slow-moving targets, noise, and clutter. -

-
References
[1] 陈小龙, 袁旺, 杜晓林, 等. 多波段FMCW雷达低慢小探测数据集(LSS-FMCWR-1. 0)及高分辨微动特征提取方法[J]. 雷达学报(中英文), 2024, 13(3): 439–553. doi: 10.12000/JR23142.CHEN Xiaolong, YUAN Wang, DU Xiaolin, et al. Multiband FMCW radar LSS-target detection dataset (LSS-FMCWR-1.0) and high-resolution micromotion feature extraction method[J]. Journal of Radars, 2024, 13(3): 439–553. doi: 10.12000/JR23142.[2] 陈小龙, 袁旺, 杜晓林, 等. 多波段多角度FMCW雷达低慢小探测数据集(LSS-FMCWR-2.0)及特征融合分类方法[J]. 雷达学报, 2025, 14(5): 1276–1293. doi: 10.12000/JR25004.CHEN Xiaolong, YUAN Wang, DU Xiaolin, et al. Multi-band multi-angle FMCW radar low-slow-small target detection dataset (LSS-FMCWR-2.0) and feature fusion classification methods[J]. Journal of Radar, 2025, 14(5): 1276–1293. doi: 10.12000/JR25004.[3] LUO Jiawei, HUANG Yulin, ZHANG Yongchao, et al. Optimal search strategy of low-altitude target for airborne phased array radar using digital elevation model[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 8025–8037. doi: 10.1109/JSTARS.2022.3206793.[4] 鲁其兴, 汤新民, 齐鸣, 等. 一种改进的交互多模型算法在机场运动目标跟踪中的应用[J]. 电子与信息学报, 2025, 47(7): 2225–2236. doi: 10.11999/JEIT241150.LU Qixing, TANG Xinmin, QI Ming, et al. An improved interacting multiple model algorithm and its application in airport moving target tracking[J]. Journal of Electronics & Information Technology, 2025, 47(7): 2225–2236. doi: 10.11999/JEIT241150.[5] YANG Yong and YANG Boyu. Overview of radar detection methods for low altitude targets in marine environments[J]. Journal of Systems Engineering and Electronics, 2024, 35(1): 1–13. doi: 10.23919/JSEE.2024.000026.[6] SKOLNIK M I. Radar Handbook[M]. 3rd ed. New York: McGraw-Hill, 2008: 1–1328.[7] WU Weihua, SUN Hemin, CAI Yichao, et al. MM-GLMB filter-based sensor control for tracking multiple maneuvering targets hidden in the Doppler blind zone[J]. IEEE Transactions on Signal Processing, 2020, 68: 4555–4567. doi: 10.1109/TSP.2020.3009497.[8] HAN Wei, TANG Ziyue, and ZHU Zhenbo. Method of target tracking with Doppler blind zone constraint[J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 889–898. doi: 10.1109/JSEE.2013.00103.[9] SONG T L, MUSICKI D, and KIM Y. Tracking through occlusions and track segmentation reduction[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 623–631. doi: 10.1109/TAES.2013.6404126.[10] YEOM S W, KIRUBARAJAN T, and BAR-SHALOM Y. Track segment association, fine-step IMM and initialization with Doppler for improved track performance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 293–309. doi: 10.1109/TAES.2004.1292161.[11] 徐开明, 王佰录, 李溯琪, 等. 低空监视雷达“走-停-走”目标跟踪技术[J]. 雷达学报, 2022, 11(3): 443–458. doi: 10.12000/JR21211.XU Kaiming, WANG Bailu, LI Suqi, et al. Move-stop-move target tracking with low-altitude surveillance radars[J]. Journal of Radars, 2022, 11(3): 443–458. doi: 10.12000/JR21211.[12] MBOUOMBOUO MBOUNGAM A H, ZHI Yongfeng, and FONZEU MONGUEN C K. Clutter map constant false alarm rate mixed with the Gabor transform for target detection via Monte Carlo simulation[J]. Applied Sciences, 2024, 14(7): 2967. doi: 10.3390/app14072967.[13] PETROVSKAYA A, PERROLLAZ M, OLIVEIRA L, et al. Awareness of Road Scene Participants for Autonomous Driving[M]. ESKANDARIAN A. Handbook of Intelligent Vehicles. London: Springer, 2012: 1383–1432. doi: 10.1007/978-0-85729-085-4_54.[14] BAIG Q, PERROLLAZ M, and LAUGIER C. A robust motion detection technique for dynamic environment monitoring: A framework for grid-based monitoring of the dynamic environment[J]. IEEE Robotics & Automation Magazine, 2014, 21(1): 40–48. doi: 10.1109/MRA.2013.2297812.[15] DANESCU R, ONIGA F, and NEDEVSCHI S. Modeling and tracking the driving environment with a particle-based occupancy grid[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1331–1342. doi: 10.1109/TITS.2011.2158097.[16] NÈGRE A, RUMMELHARD L, and LAUGIER C. Hybrid sampling Bayesian occupancy filter[C]. 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 2014: 1307–1312. doi: 10.1109/IVS.2014.6856554.[17] MAHLER R. Statistical Multisource-Multitarget Information Fusion[M]. Boston: Artech House, 2007.[18] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119.[19] VO B N and MA W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091–4104. doi: 10.1109/TSP.2006.881190.[20] VO B T, VO B N, and CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553–3567. doi: 10.1109/TSP.2007.894241.[21] VO B T, VO B N, and CANTONI A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409–423. doi: 10.1109/TSP.2008.2007924.[22] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822.[23] VO B N, VO B T, and PHUNG D. Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24): 6554–6567. doi: 10.1109/TSP.2014.2364014.[24] NUSS D, REUTER S, THOM M, et al. A random finite set approach for dynamic occupancy grid maps with real-time application[J]. International Journal of Robotics Research, 2018, 37(8): 841–866. doi: 10.1177/0278364918775523.[25] FAN H Q, KUCNER T P, MAGNUSSON M, et al. A dual PHD filter for effective occupancy filtering in a highly dynamic environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2977–2993. doi: 10.1109/TITS.2017.2770152.[26] COUÉ C, PRADALIER C, LAUGIER C, et al. Bayesian occupancy filtering for multitarget tracking: An automotive application[J]. The International Journal of Robotics Research, 2006, 25(1): 19–30. doi: 10.1177/0278364906061158.[27] CHEN C, TAY C, LAUGIER C, et al. Dynamic environment modeling with gridmap: A multiple-object tracking application[C]. 2006 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 2006: 1–6. doi: 10.1109/ICARCV.2006.345399.[28] SAVAL-CALVO M, MEDINA-VALDÉS L, CASTILLO-SECILLA J M, et al. A review of the Bayesian occupancy filter[J]. Sensors, 2017, 17(2): 344. doi: 10.3390/s17020344.[29] MAHAFZA B R and ELSHERBENI A Z. Matlab Simulations for Radar Systems Design[M]. New York: Chapman and Hall/CRC, 2004.[30] MAHLER R. Advances in Statistical Multisource-Multitarget Information Fusion[M]. Boston: Artech House, 2014.[31] HUANG Zicheng, LIANG Zuoping, ZHOU Shibo, et al. An improved density-based spatial clustering of applications with noise algorithm with an adaptive parameter based on the sparrow search algorithm[J]. Algorithms, 2025, 18(5): 273. doi: 10.3390/a18050273.[32] SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457. doi: 10.1109/TSP.2008.920469. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:
- Figure 1. Radar surveillance diagram
- Figure 2. Signal pre-processing
- Figure 3. An illustration of adaptive newborn function
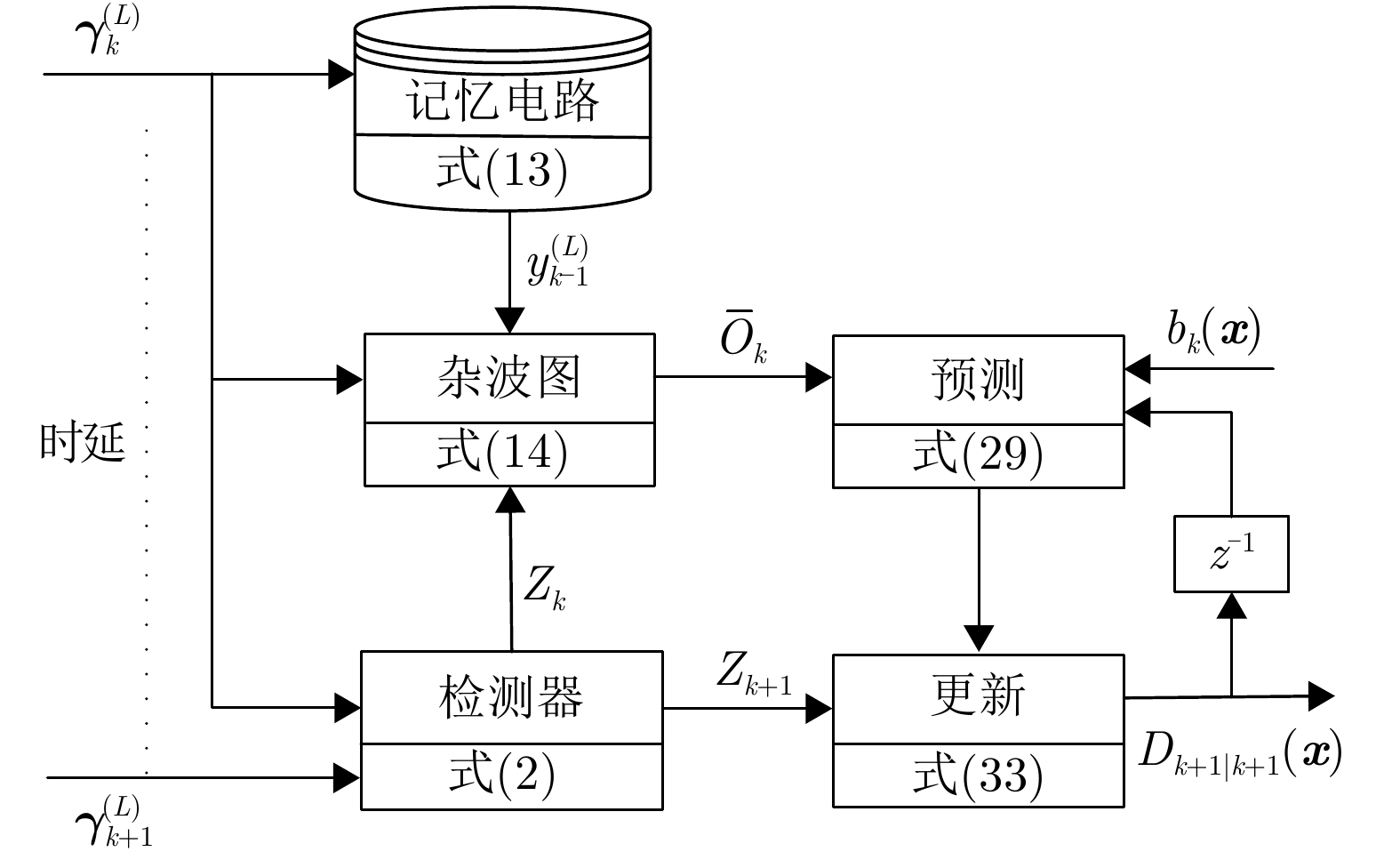
- Figure 4. Flow diagram of the proposed DPHD occupancy filter
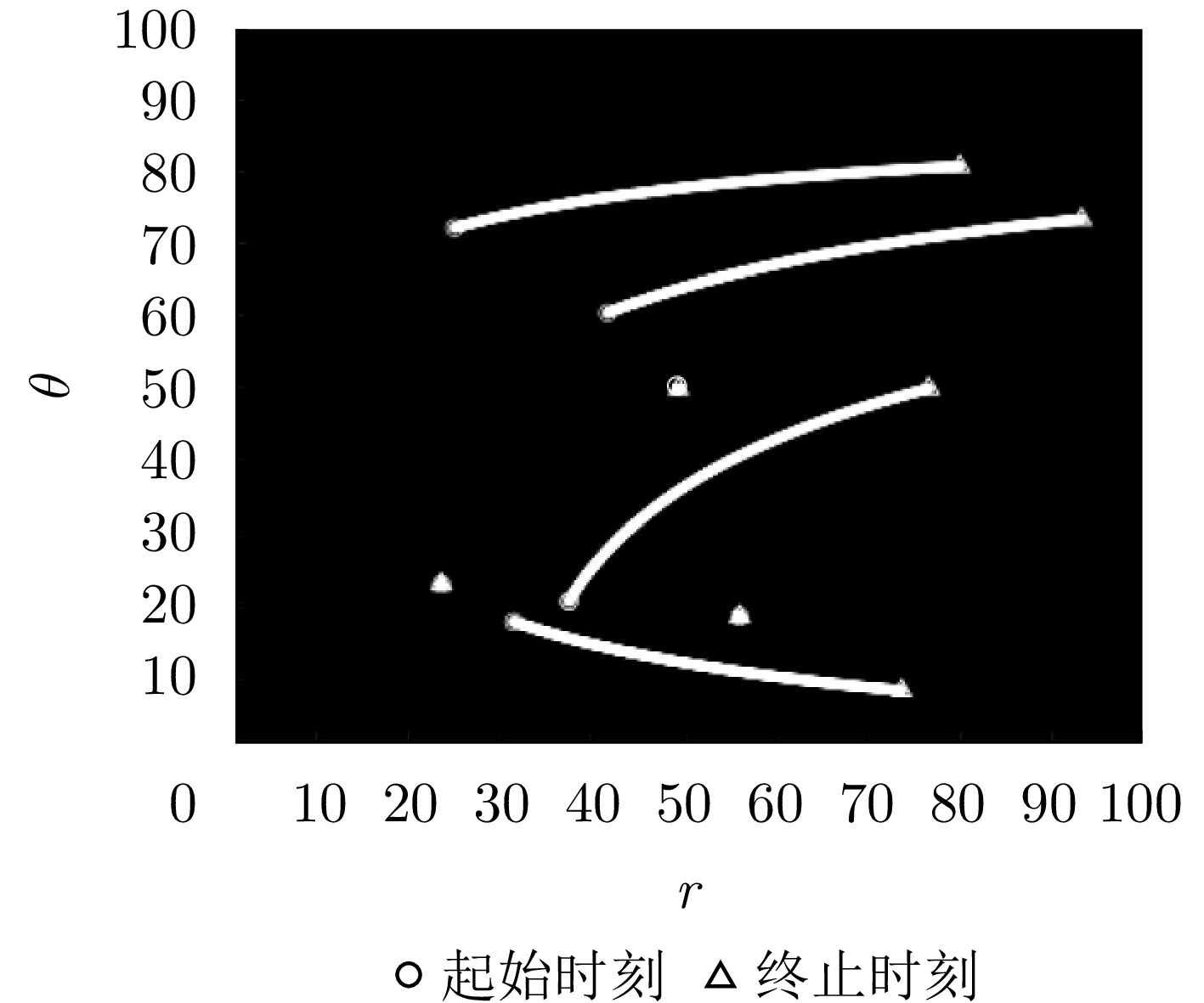
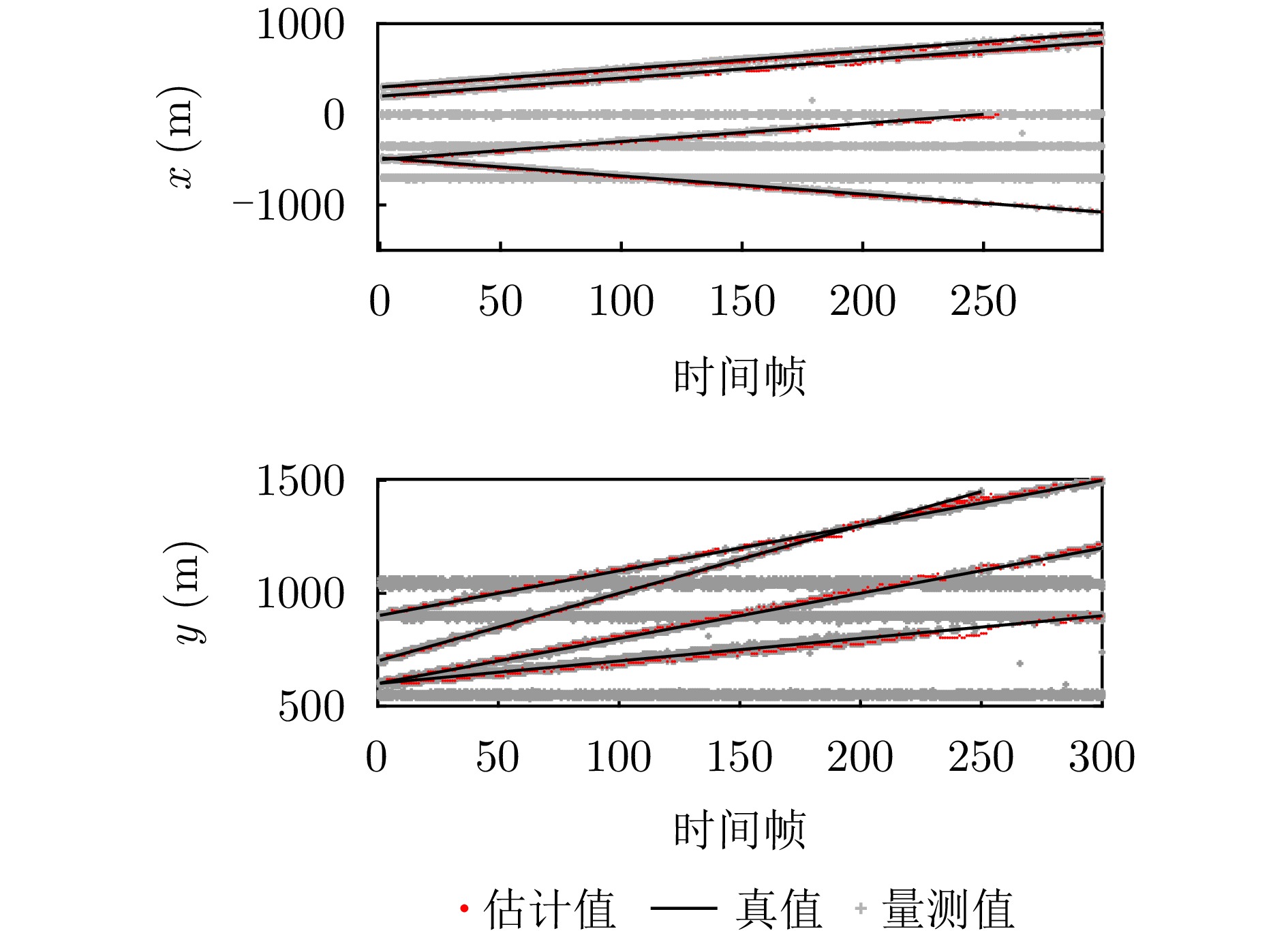
- Figure 5. Truth of object state
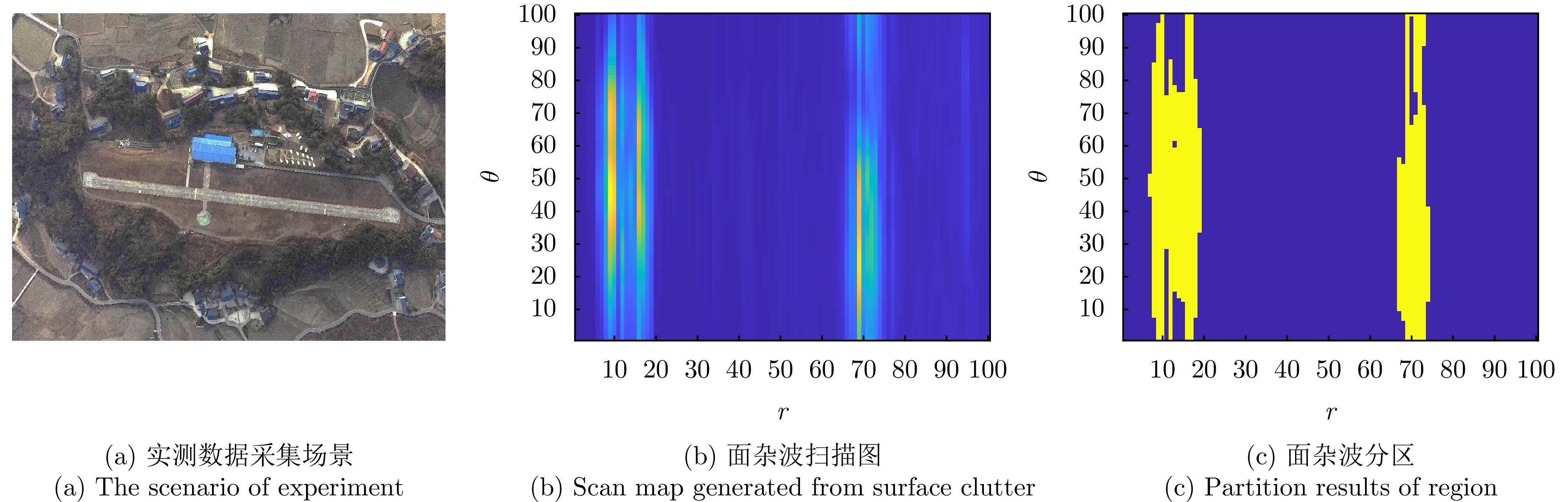
- Figure 6. An illustration of surface clutter
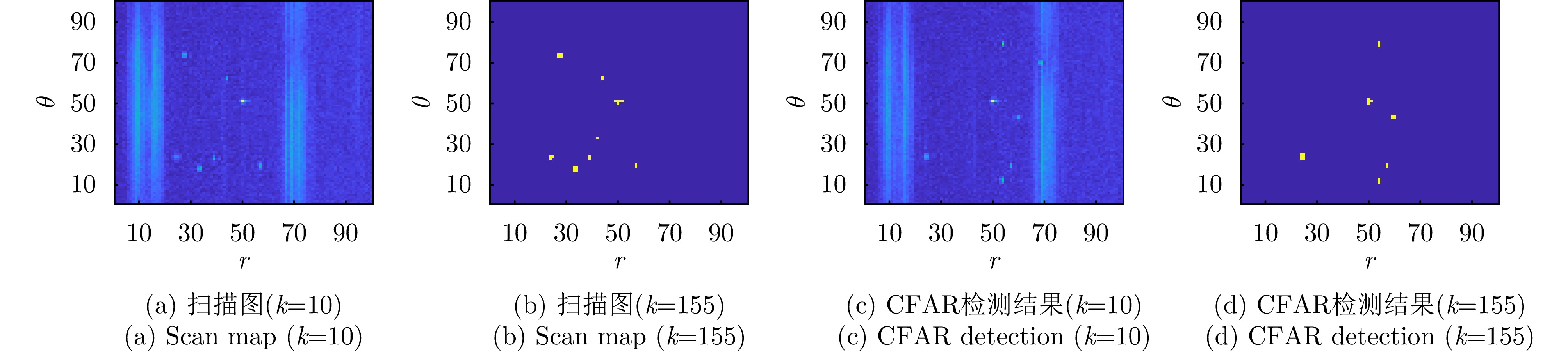
- Figure 7. The scan map and the results of CFAR
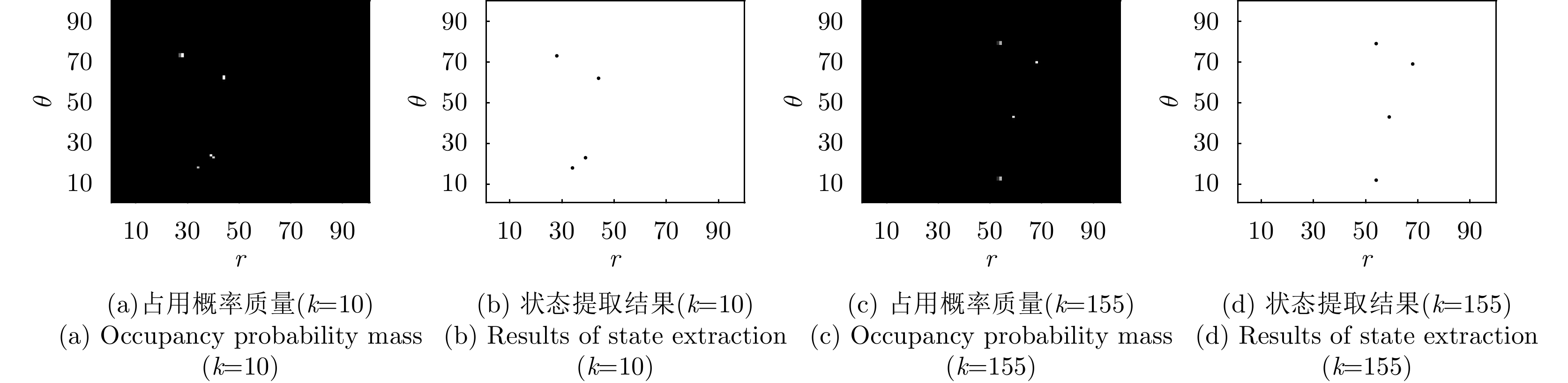
- Figure 8. Filter results of the proposed filter (certain frames)
- Figure 9. Filter results of the proposed filter (the whole frames)
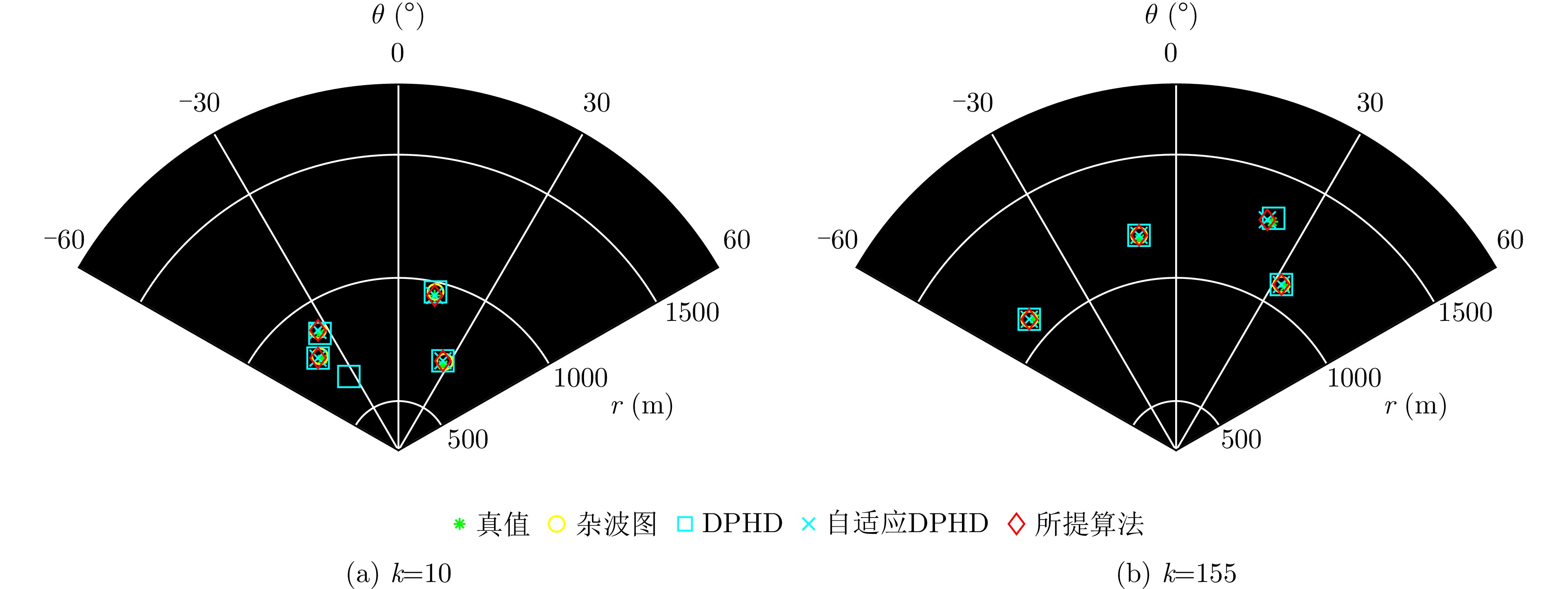
- Figure 10. The filter results of different algorithms after cluster denoted by polar coordinate system
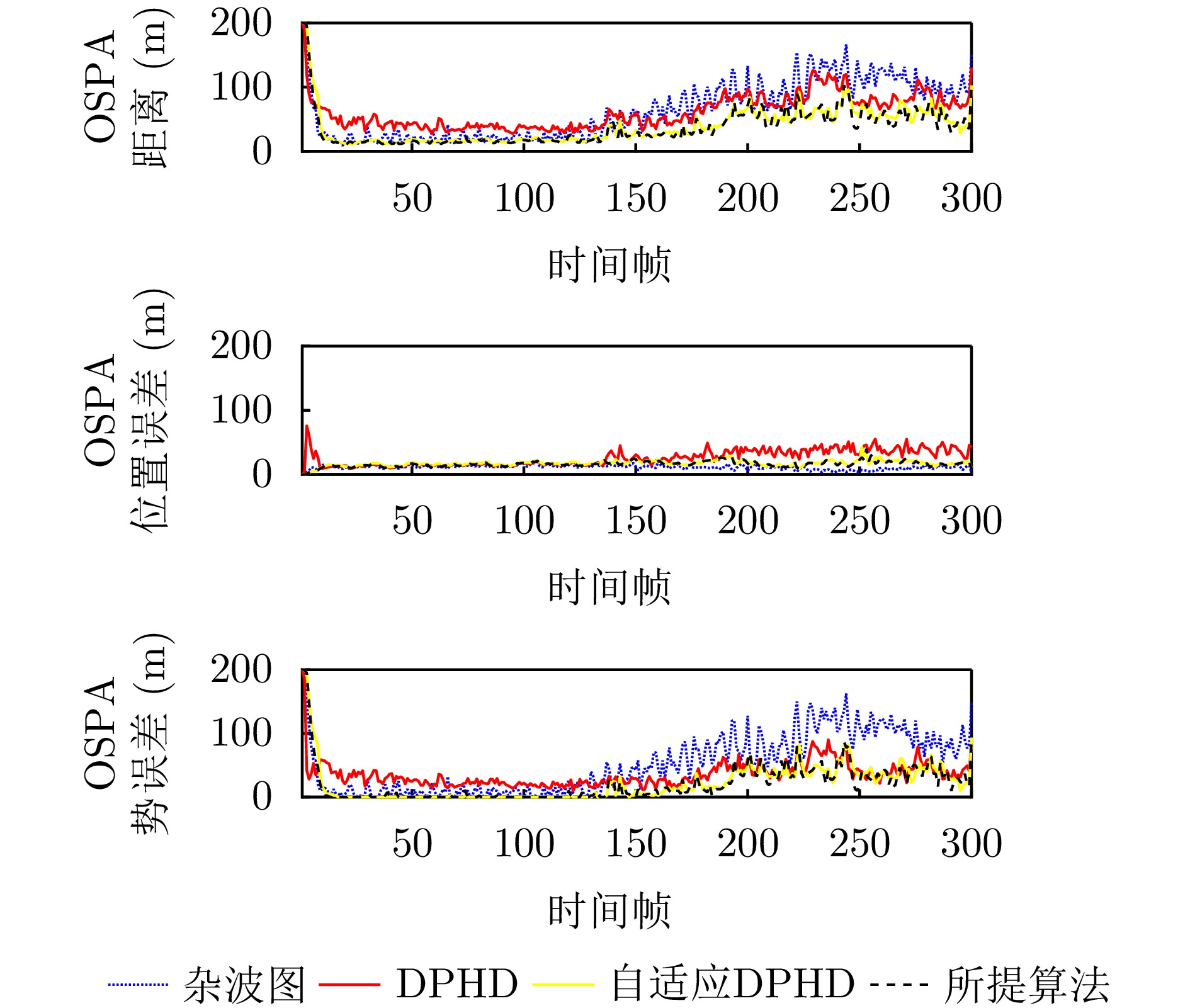
- Figure 11. Average of OSPA errors in 100 Monte Carlo trials
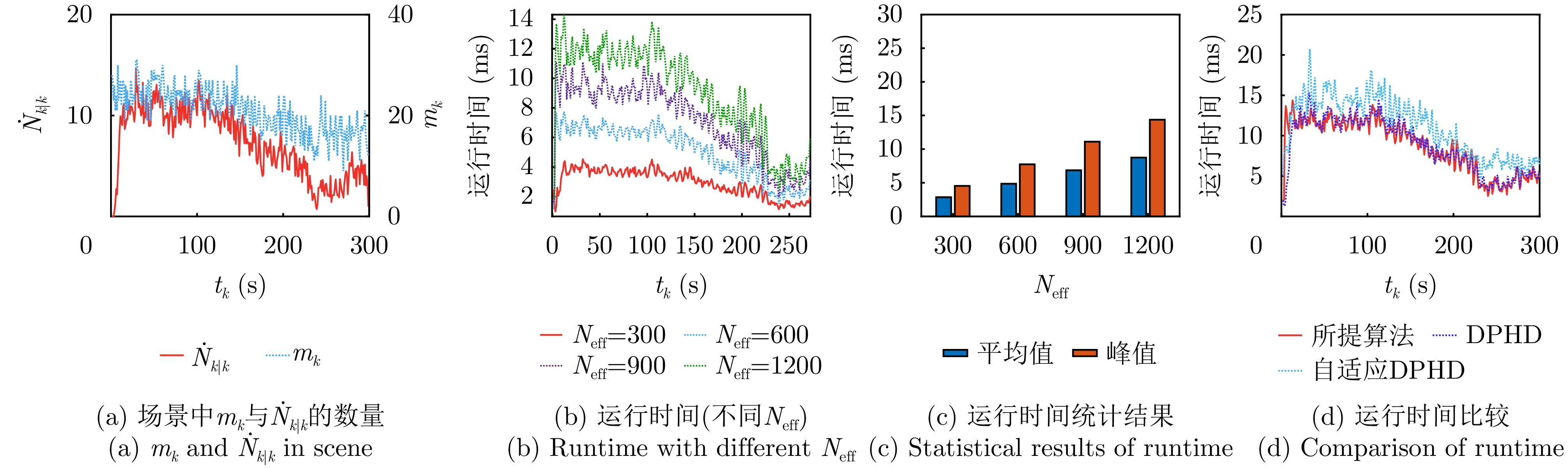
- Figure 12. Runtime of the proposed method
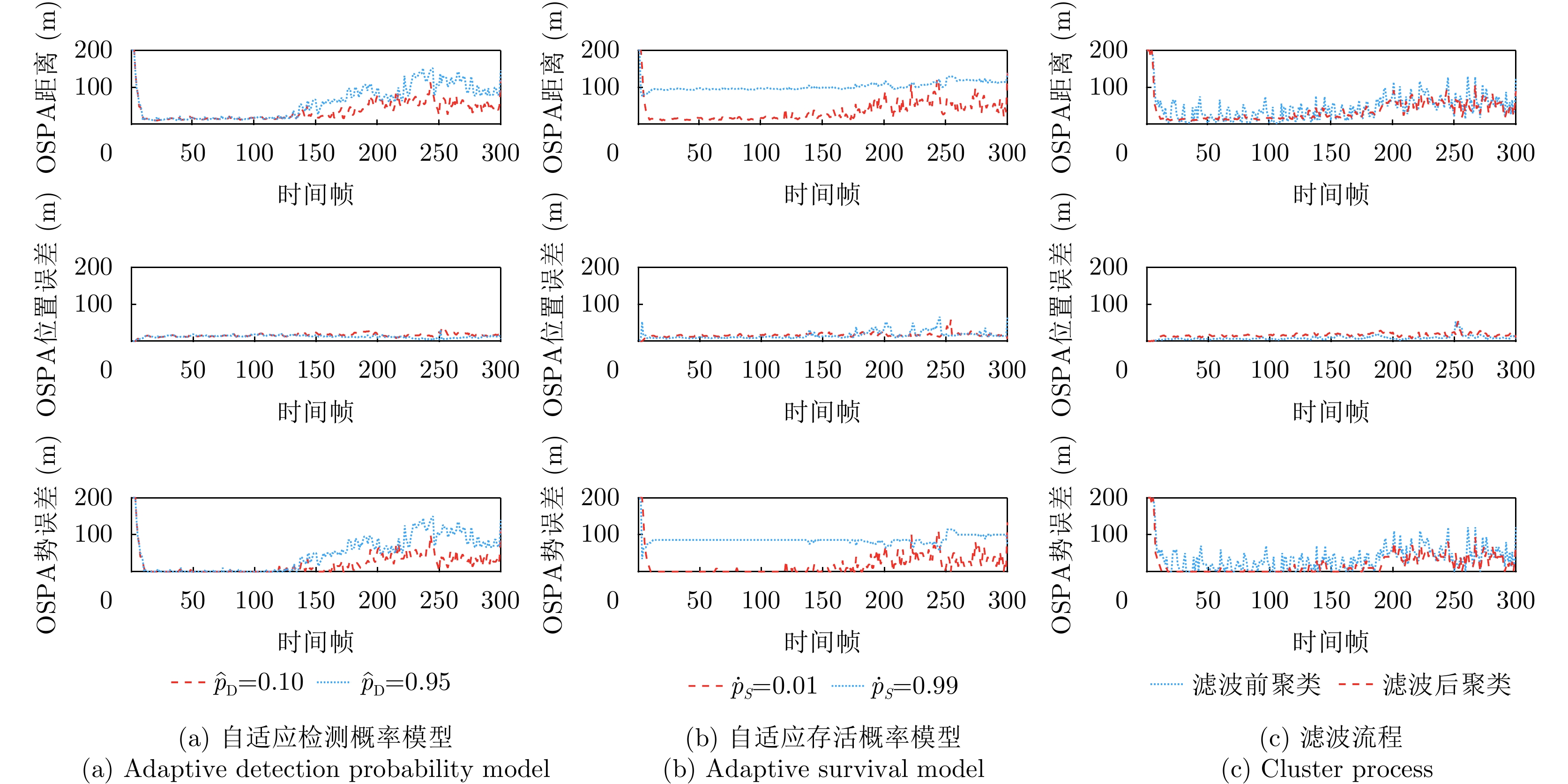
- Figure 13. Average of OSPA errors in 100 Monte Carlo trials (ablation experiment)
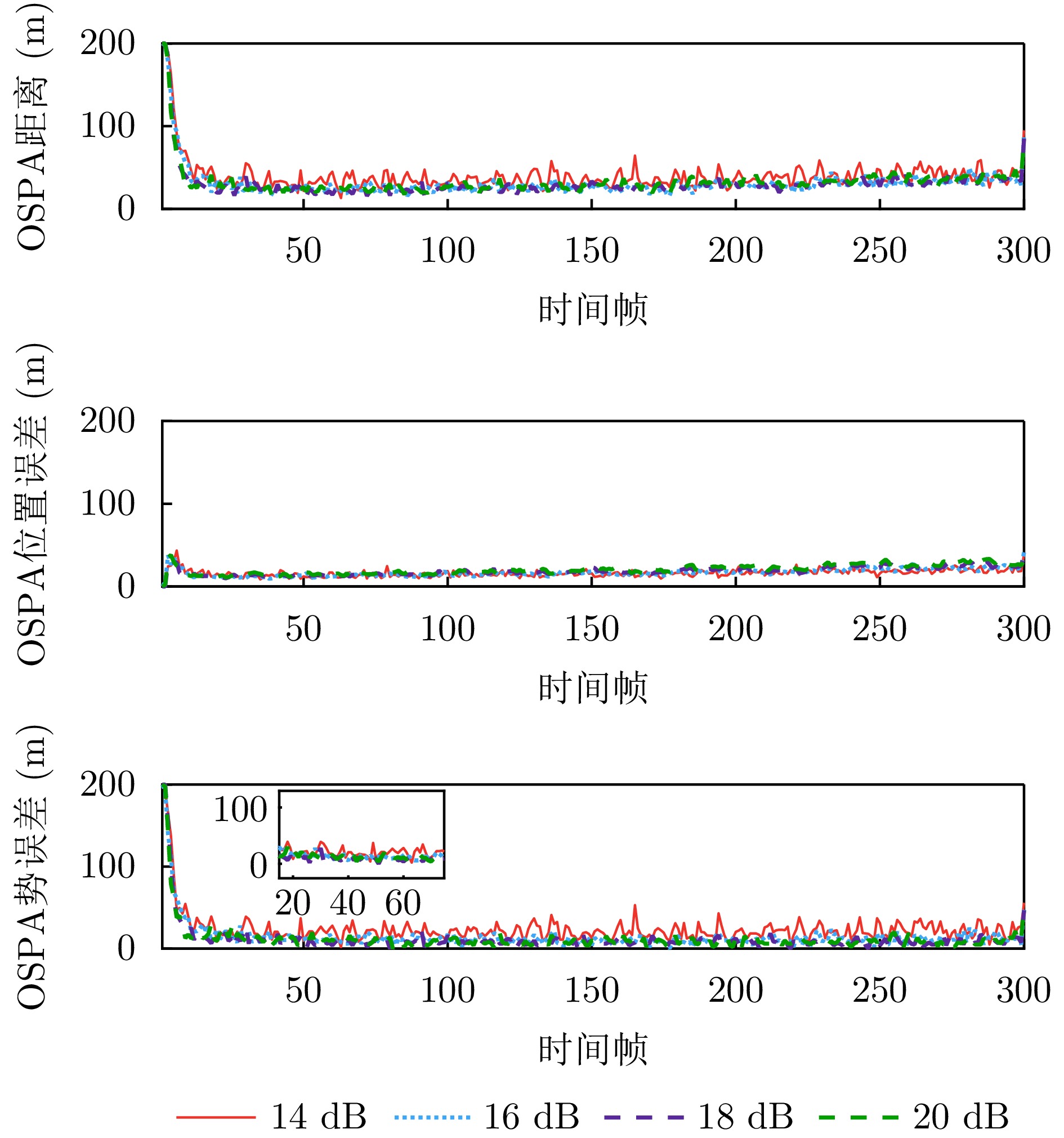
- Figure 14. Average of OSPA errors in 100 Monte Carlo trials under different SNR