ZHANG Jiaxiang, ZHANG Kaixiang, LIANG Zhennan, et al. An intelligent frequency decision method for a frequency agile radar based on deep reinforcement learning[J]. Journal of Radars, 2024, 13(1): 227–239. doi: 10.12000/JR23197
Citation:
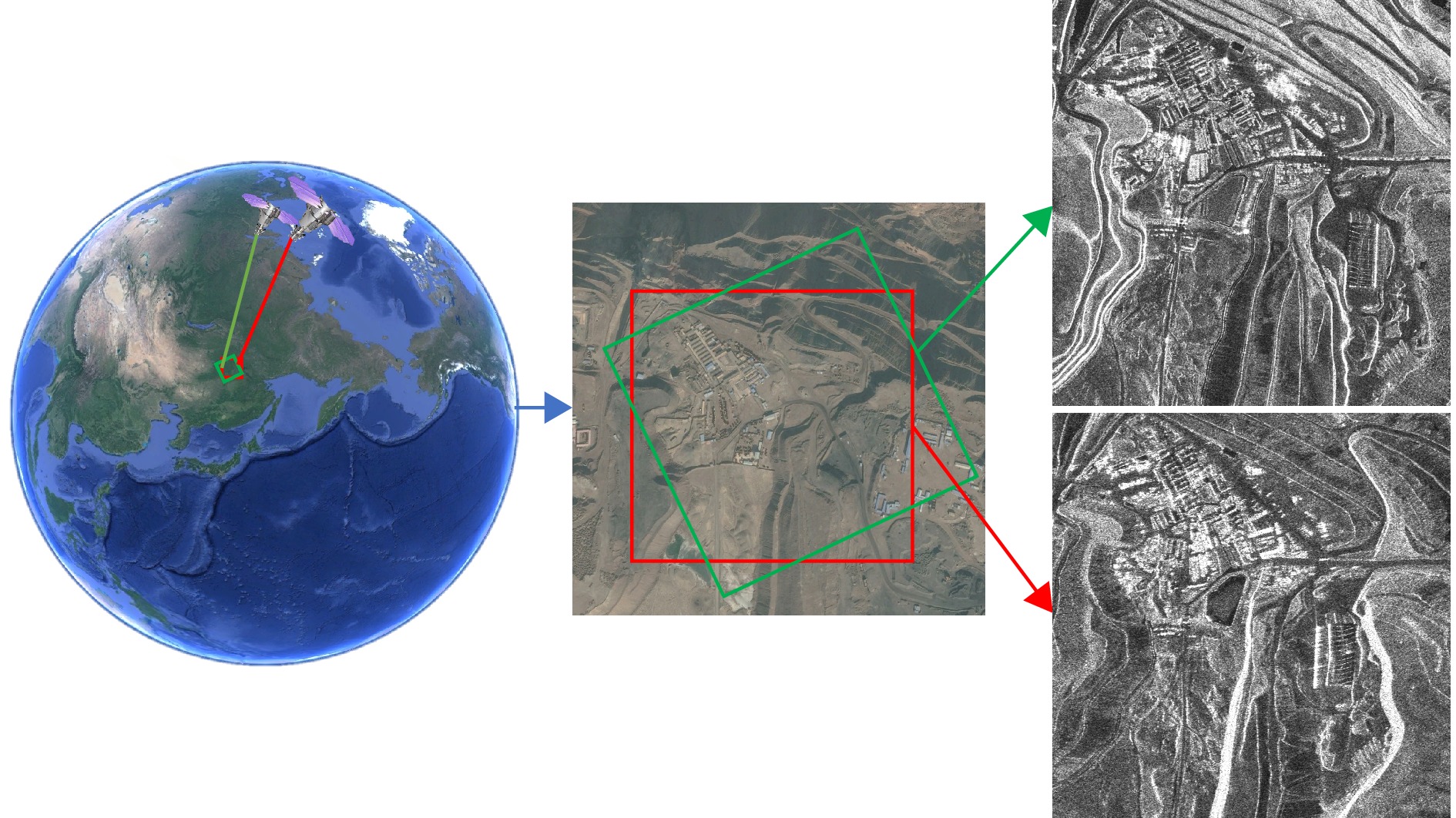
SUN Xiaokun, YUN Zekai, HU Canbin, et al. End-to-end registration algorithm for high-resolution multi-view SAR images[J]. Journal of Radars, 2025, 14(2): 389–404. doi: 10.12000/JR24211
ZHANG Jiaxiang, ZHANG Kaixiang, LIANG Zhennan, et al. An intelligent frequency decision method for a frequency agile radar based on deep reinforcement learning[J]. Journal of Radars, 2024, 13(1): 227–239. doi: 10.12000/JR23197
Citation:
SUN Xiaokun, YUN Zekai, HU Canbin, et al. End-to-end registration algorithm for high-resolution multi-view SAR images[J]. Journal of Radars, 2025, 14(2): 389–404. doi: 10.12000/JR24211
College of Information Science and Technology, Beijing University of Chemical Technology, Beijing 100029, China
Funds:
The Fundamental Research Funds for the Central Universities (buctrc202218), The Fundamental Research Funds for the Central Universities (ZY2413)
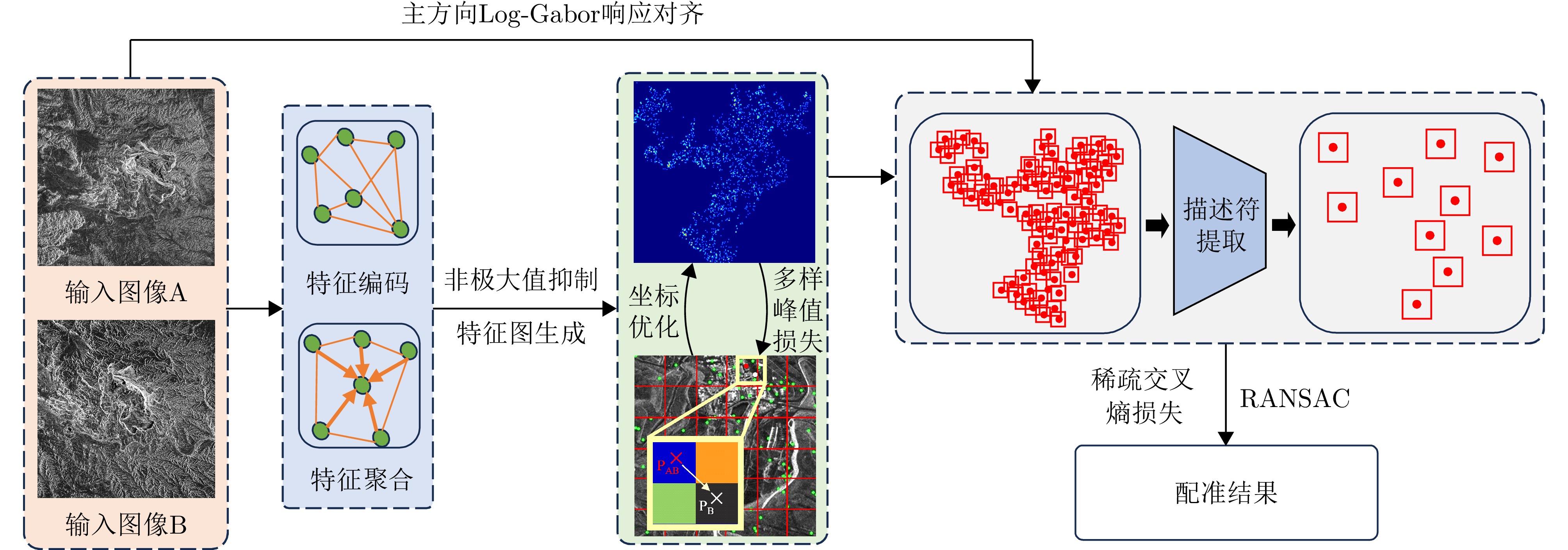
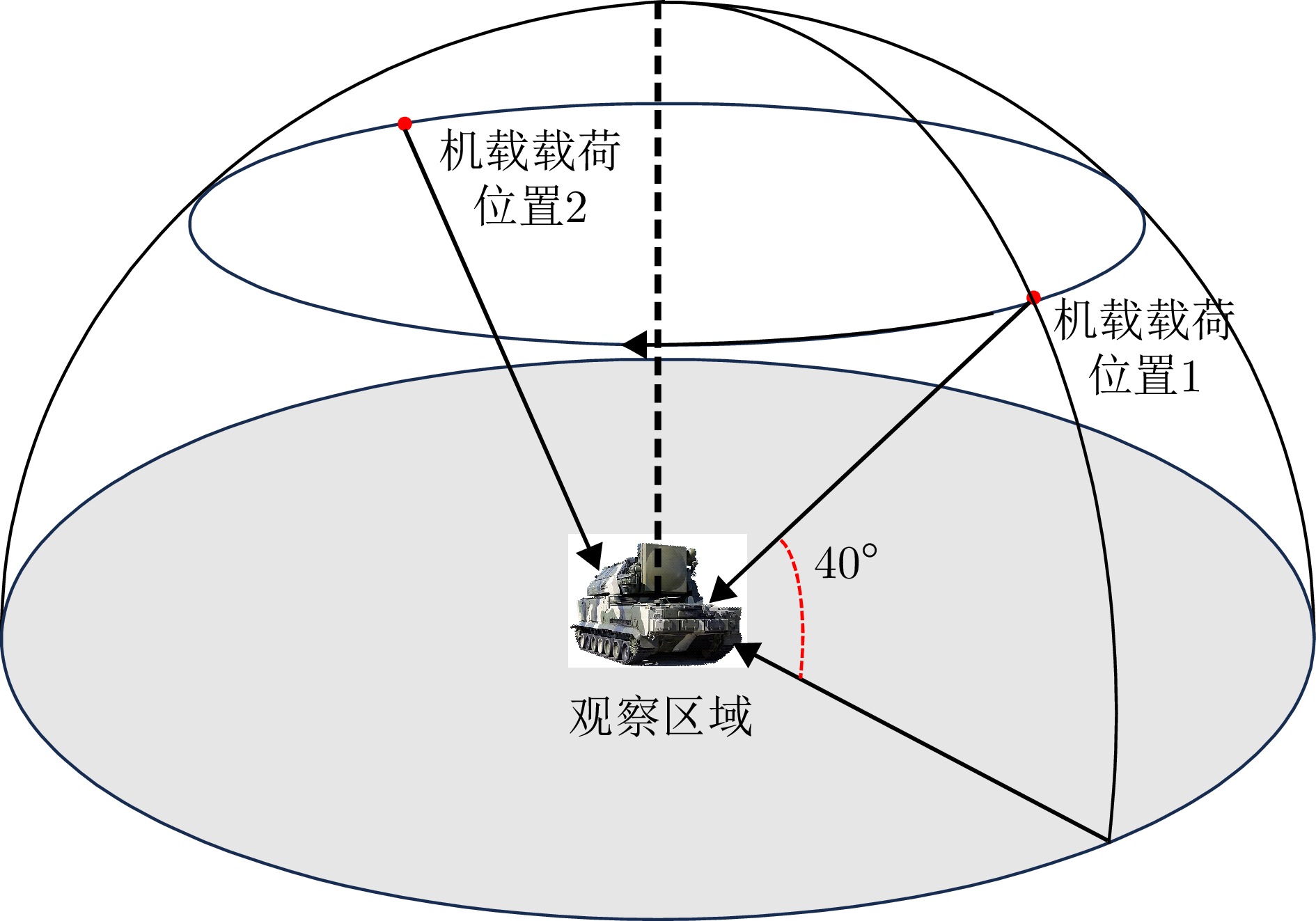
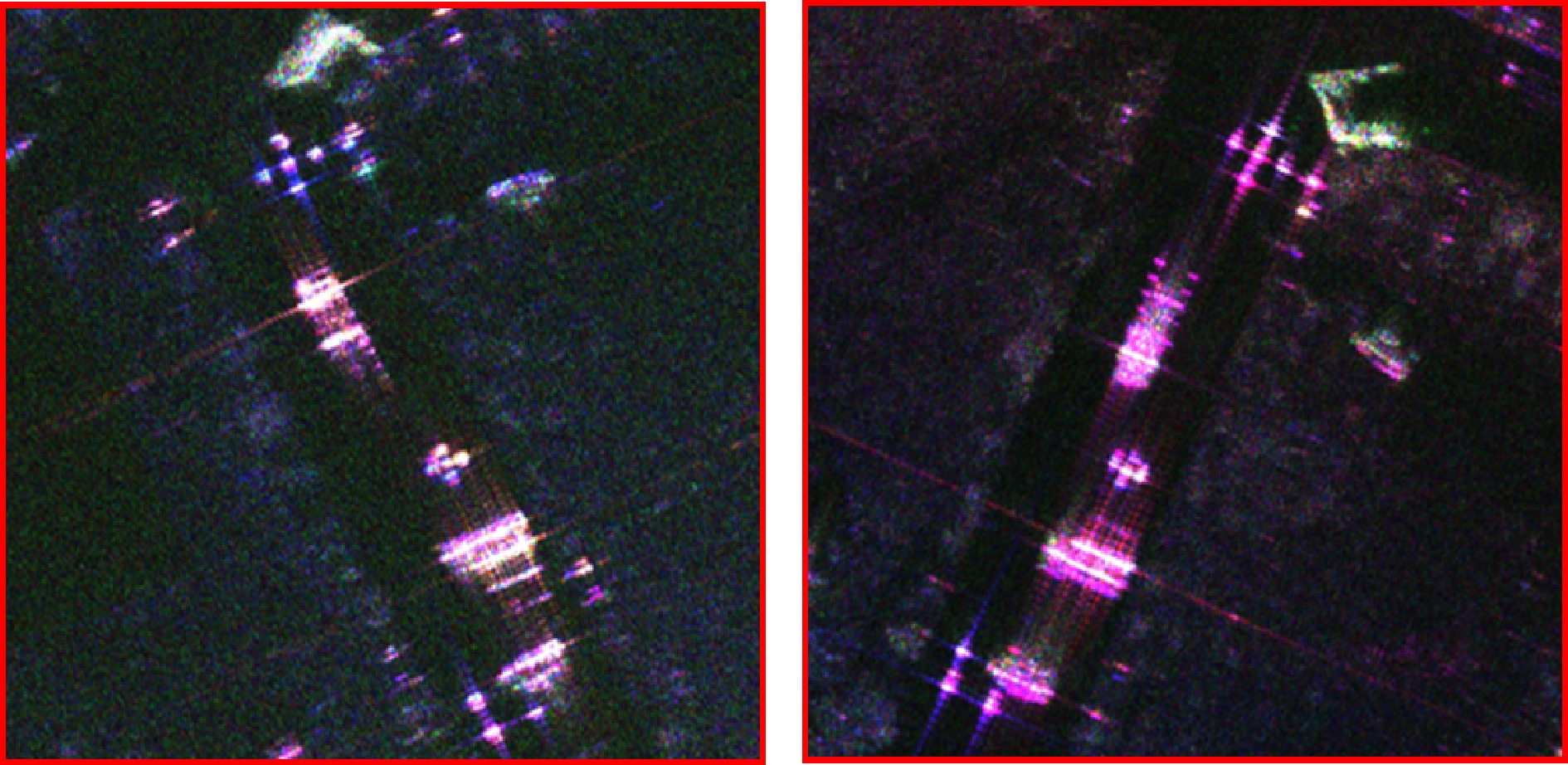
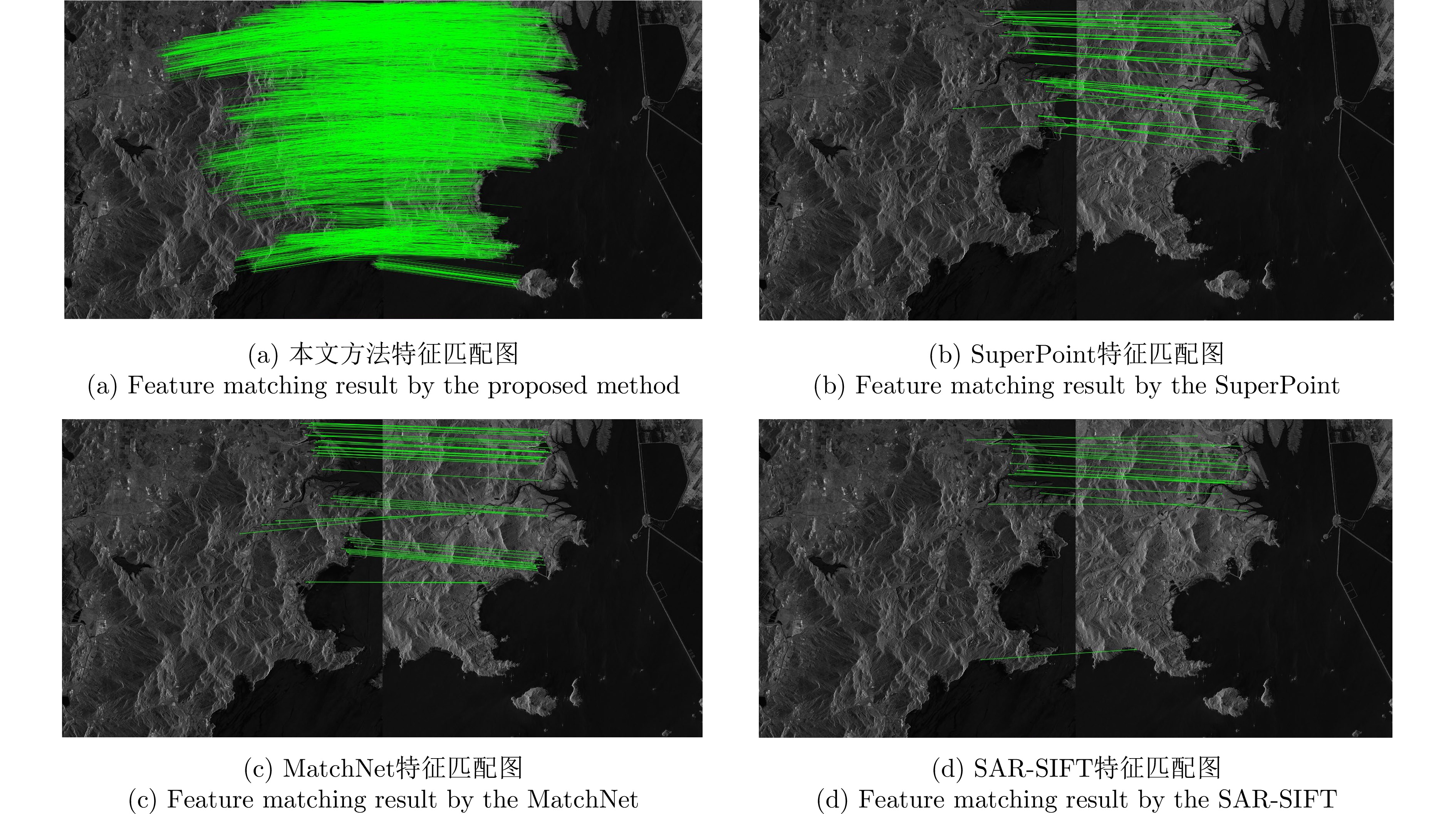
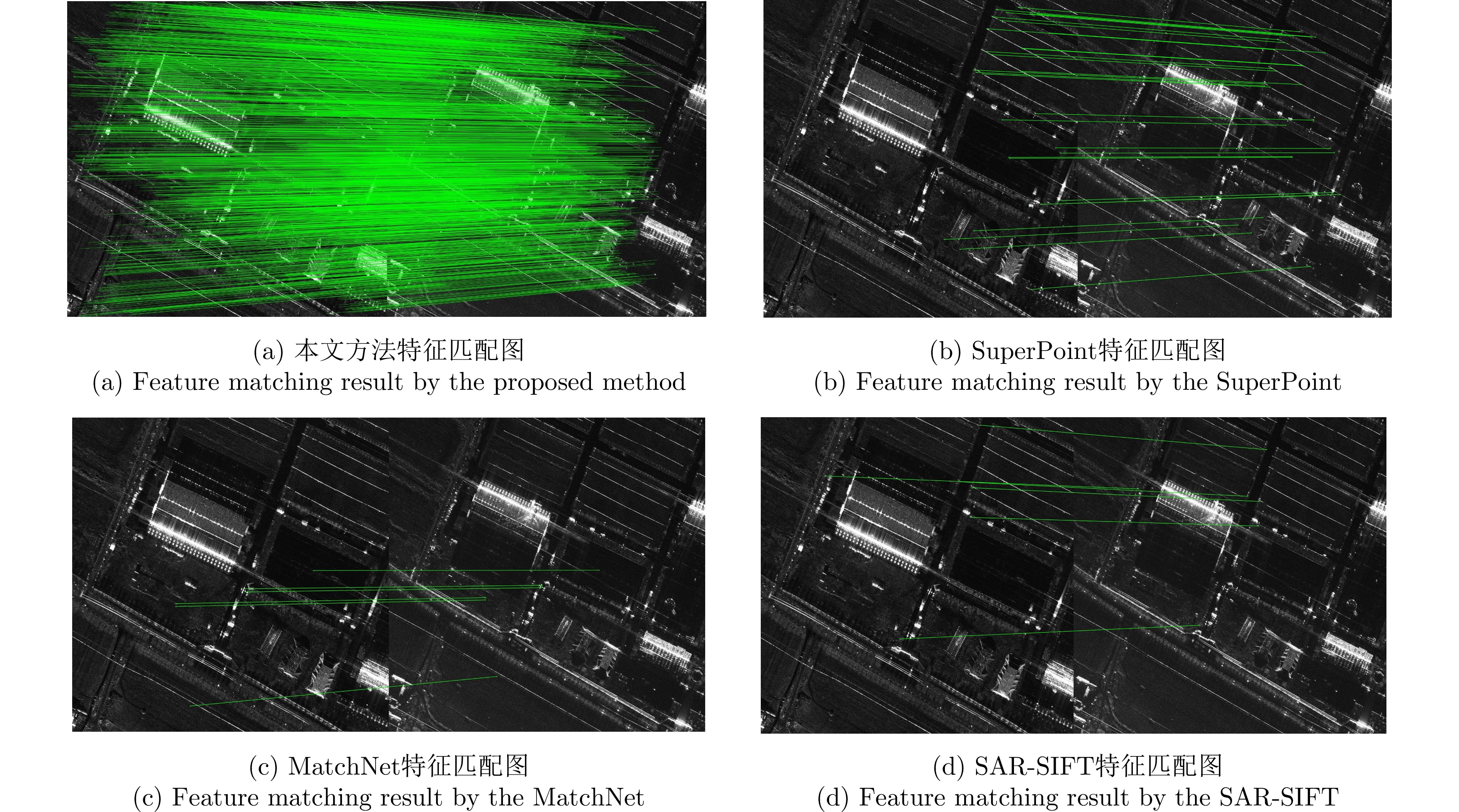
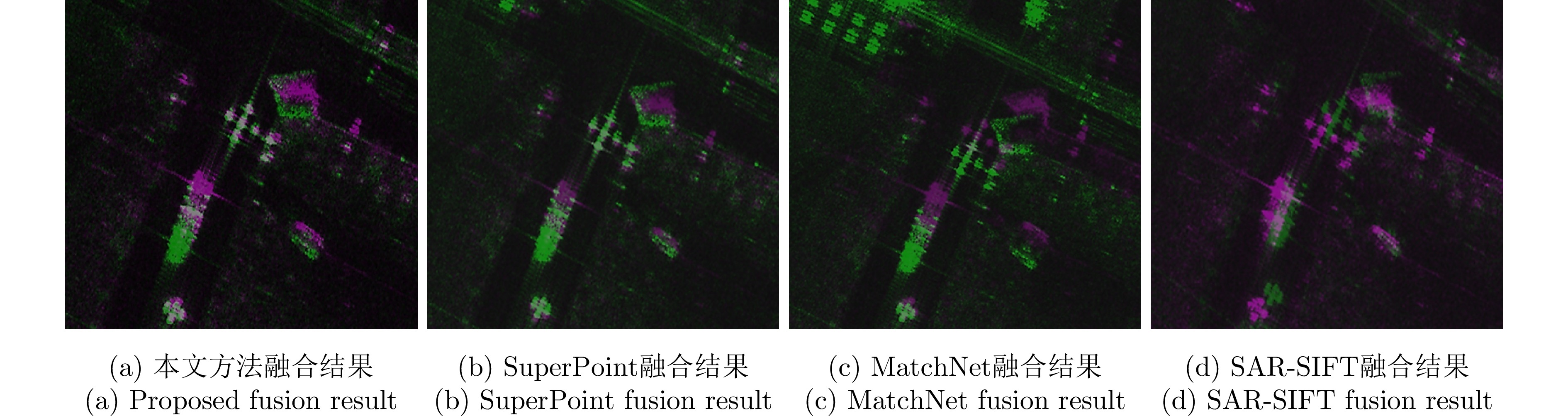
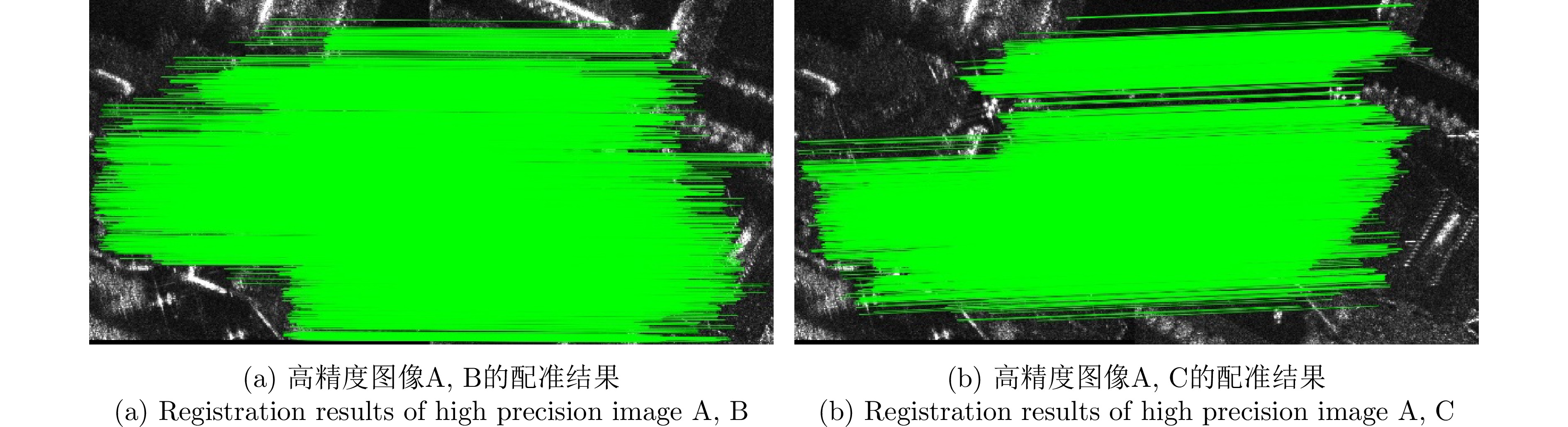
Due to the side-looking and coherent imaging mechanisms, feature differences between high-resolution Synthetic Aperture Radar (SAR) images increase when the imaging viewpoint changes considerably, making image registration highly challenging. Traditional registration techniques for high-resolution multi-view SAR images mainly face issues, such as insufficient keypoint localization accuracy and low matching precision. This work designs an end-to-end high-resolution multi-view SAR image registration network to address the above challenges. The main contributions of this study include the following: A high-resolution SAR image feature extraction method based on a local pixel offset model is proposed. This method introduces a diversity peak loss to guide response weight allocation in the keypoint extraction network and optimizes keypoint coordinates by detecting pixel offsets. A descriptor extraction method is developed based on adaptive adjustment of convolution kernel sampling positions that utilizes sparse cross-entropy loss to supervise descriptor matching in the network. Experimental results show that compared with other registration methods, the proposed algorithm achieves substantial improvements in the high-resolution adjustment of convolution kernel sampling positions, which utilize sparse cross-entropy loss to supervise descriptor matching in the network. Experimental results illustrate that compared with other registration methods, the proposed algorithm achieves remarkable improvements in high-resolution multi-view SAR image registration, with an average error reduction of over 65%, 3~5-fold increases in the number of correctly matched point pairs, and an average reduction of over 50% in runtime.
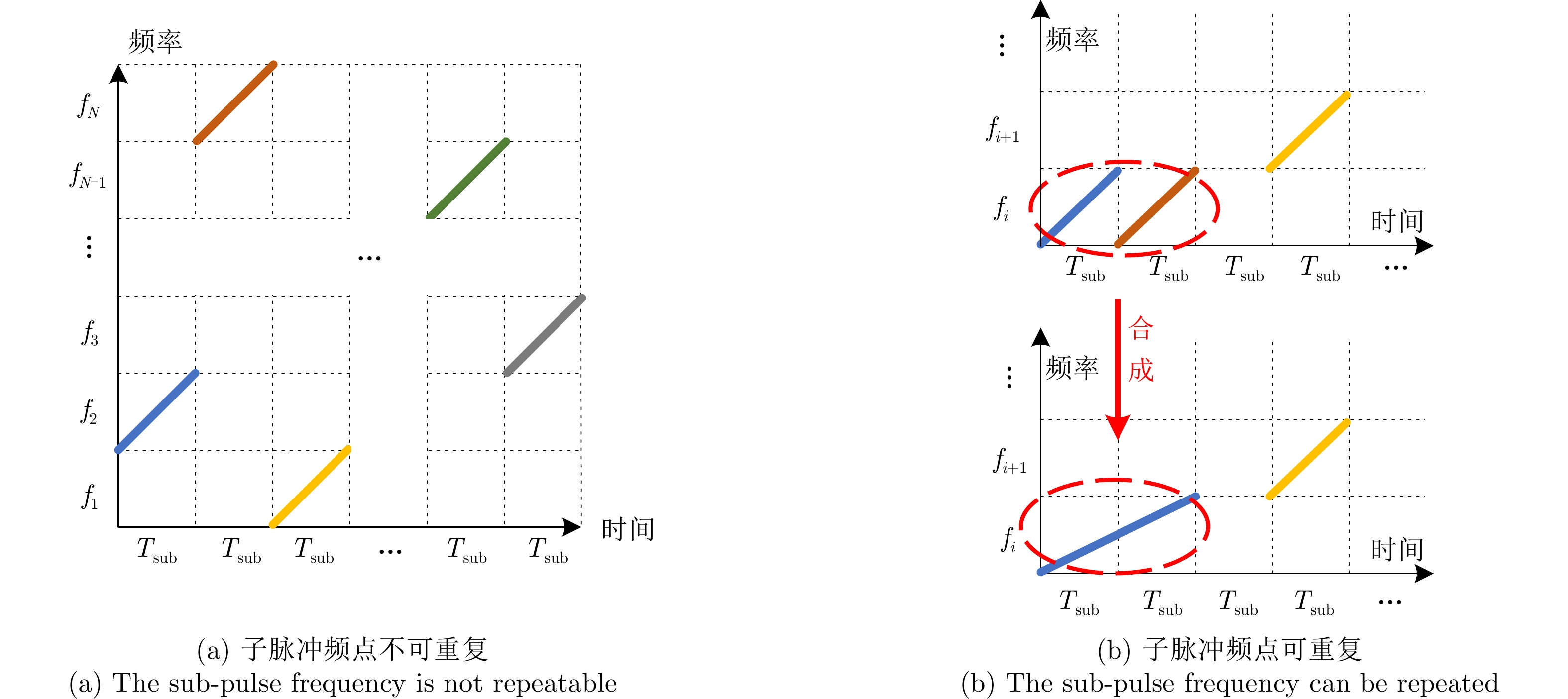
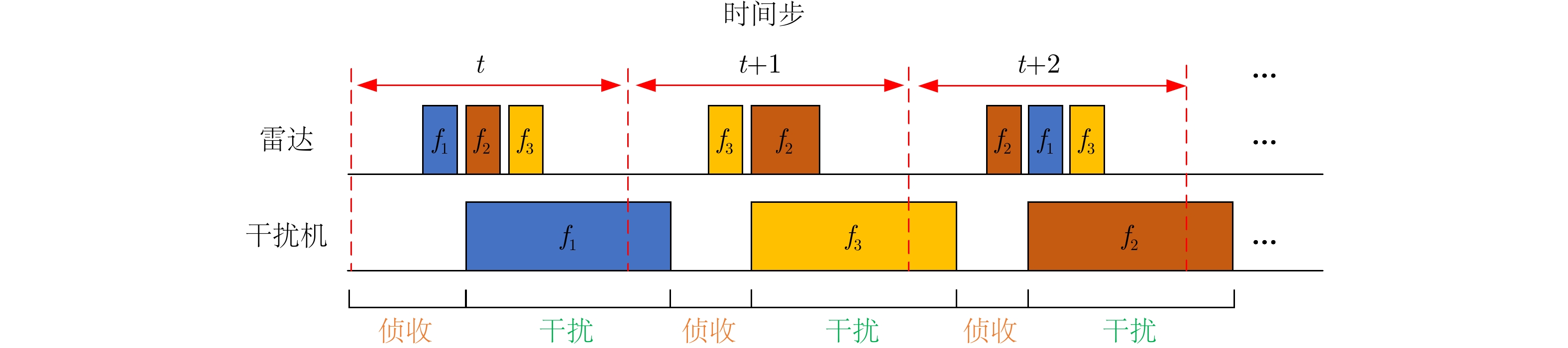
由于现代干扰机可以对接收到的雷达信号进行快速测频与频率引导,对传统雷达具备较大威胁。而频率捷变雷达可以实现子脉冲级的频率调制,为与其对抗提供了可能。作为常用的雷达传输信号波形,基于线性调频(Linear Frequency Modulation, LFM)信号的子脉冲频率捷变波形如图1(a)所示,其时域表达式如下:
图
1
频率捷变波形示意图
Figure
1.
Schematic diagram of the frequency agility waveform
其中,rect(⋅)表示矩形窗函数,N表示子脉冲个数,Tsub表示子脉冲脉宽;τn表示第n个子脉冲的延时,fn表示子脉冲频点,Kn表示第n个子脉冲的调频斜率。频率捷变雷达各可选频点应当去相关从而达到频率抗干扰的目的,即保证si(ω)sj(ω)=0,其中,si(ω)表示子脉冲 i 的频谱,sj(ω)表示子脉冲 j的频谱。
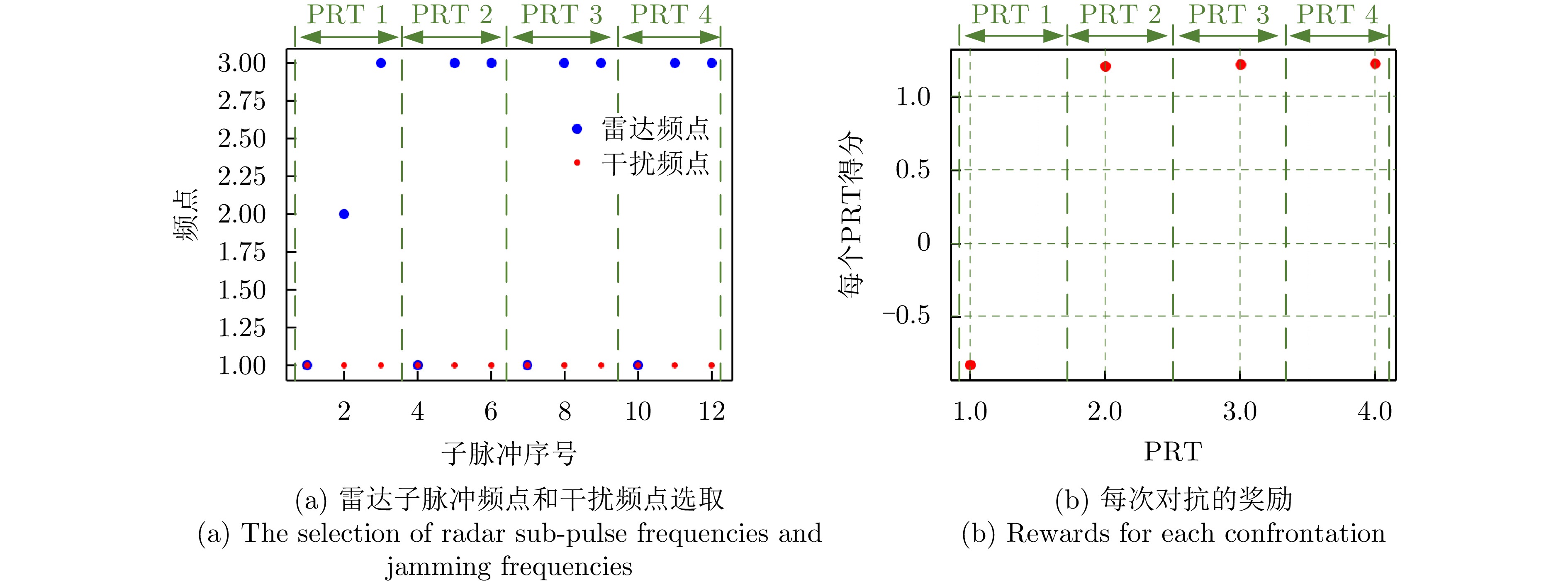
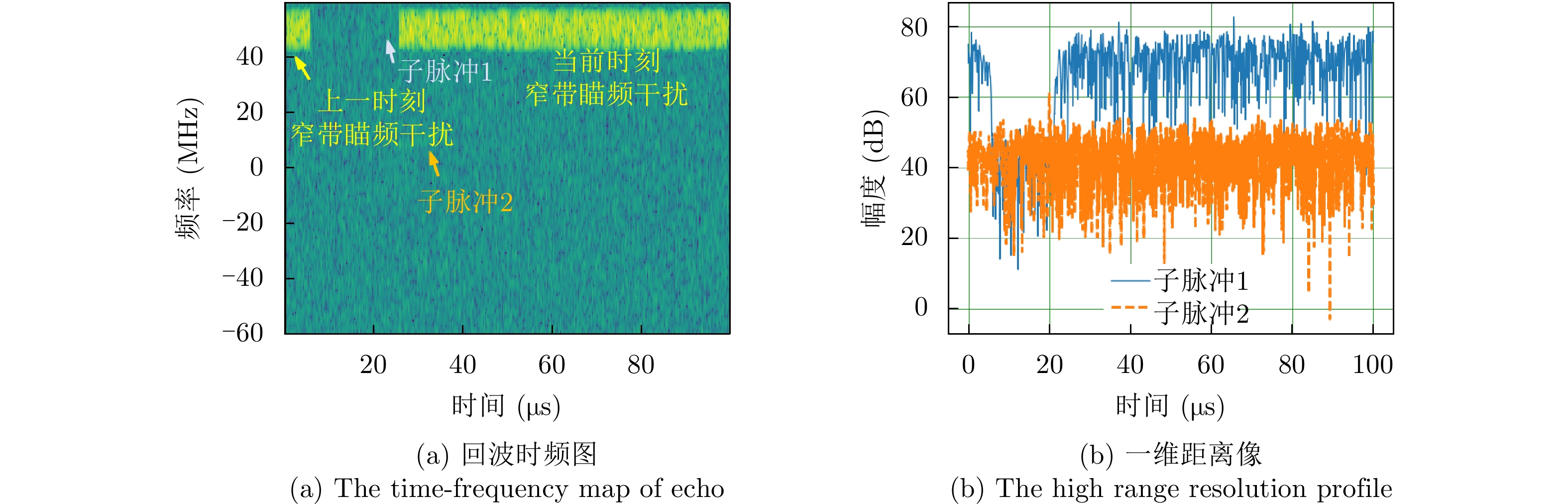
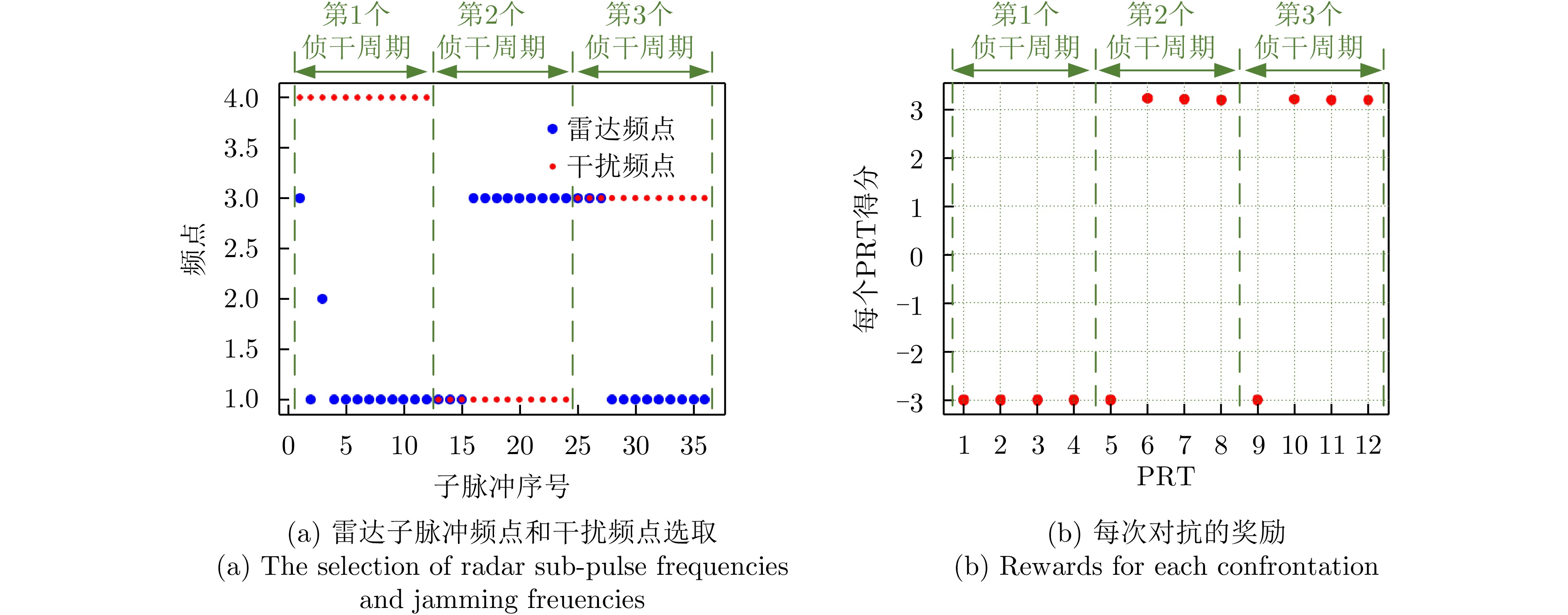
对于脉内侦干策略,假设干扰机侦收到雷达脉冲上升沿及下降沿,立即对其测频,转发对应频点的窄带瞄频干扰。值得注意的是,干扰时长设置略小于1个脉冲重复周期(Pulse Repetition Time, PRT),从而使得在当前PRT会同时受到上一时刻以及当前时刻的干扰。因此,雷达在该干扰策略下的一种较为合适的选择为后续子脉冲发射不同于子脉冲1的雷达频点,并且每个PRT均保持相同的发射策略。由于干扰所在频点在滤波后可能会在邻近频点上存在干扰功率残留,因此最优策略为雷达后续子脉冲跳频到距离子脉冲1所选频点的最远频点上。即雷达最优频点选择为[1,N,N]或[N,1,1]。
HUANG Zhongling, YAO Xiwen, and HAN Junwei. Progress and perspective on physically explainable deep learning for synthetic aperture radar image interpretation[J]. Journal of Radars, 2022, 11(1): 107–125. doi: 10.12000/JR21165.
XU Zhen, WANG Yu, LI Ning, et al. A novel approach to change detection in SAR images with CNN classification[J]. Journal of Radars, 2017, 6(5): 483–491. doi: 10.12000/JR17075.
WANG Zhihao, LI Gang, and JIANG Xiao. Flooded area detection method based on fusion of optical and SAR remote sensing images[J]. Journal of Radars, 2020, 9(3): 539–553. doi: 10.12000/JR19095.
HONG Wen, WANG Yanping, LIN Yun, et al. Research progress on three-dimensional SAR imaging techniques[J]. Journal of Radars, 2018, 7(6): 633–654. doi: 10.12000/JR18109.
DING Chibiao, LIU Jiayin, LEI Bin, et al. Preliminary exploration of systematic geolocation accuracy of GF-3 SAR satellite system[J]. Journal of Radars, 2017, 6(1): 11–16. doi: 10.12000/JR17024.
[6]
XIANG Yuming, PENG Lingxiao, WANG Feng, et al. Fast registration of multiview slant-range SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19(3): 4007505. doi: 10.1109/LGRS.2020.3045099.
[7]
WEI S and LAI Shanghong. Fast template matching based on normalized cross correlation with adaptive multilevel winner update[J]. IEEE Transactions on Image Processing, 2008, 17(11): 2227–2235. doi: 10.1109/TIP.2008.2004615.
[8]
WANG Fei and VEMURI B C. Non-rigid multi-modal image registration using cross-cumulative residual entropy[J]. International Journal of Computer Vision, 2007, 74(2): 201–215. doi: 10.1007/s11263-006-0011-2.
[9]
DELLINGER F, DELON J, GOUSSEAU Y, et al. SAR-SIFT: A SIFT-like algorithm for SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(1): 453–466. doi: 10.1109/TGRS.2014.2323552.
XIANG Deliang, XU Yihao, CHENG Jianda, et al. An algorithm based on a feature interaction-based keypoint detector and sim-CSPNet for SAR image registration[J]. Journal of Radars, 2022, 11(6): 1081–1097. doi: 10.12000/JR22110.
[11]
LIAO Furong, CHEN Yan, CHEN Yunping, et al. SAR image registration based on optimized ransac algorithm with mixed feature extraction[C]. 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, USA, 2020: 1153–1156. doi: 10.1109/IGARSS39084.2020.9323180.
[12]
DENG Yang and DENG Yunkai. Two-step matching approach to obtain more control points for SIFT-like very-high-resolution SAR image registration[J]. Sensors, 2023, 23(7): 3739. doi: 10.3390/s23073739.
[13]
XIANG Deliang, XIE Yuzhen, CHENG Jianda, et al. Optical and SAR image registration based on feature decoupling network[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5235913. doi: 10.1109/TGRS.2022.3211858.
[14]
XIANG Yuming, JIAO Niangang, LIU Rui, et al. A geometry-aware registration algorithm for multiview high-resolution SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5234818. doi: 10.1109/TGRS.2022.3205382.
[15]
GUO Qiangliang, XIAO Jin, HU Xiaoguang, et al. Local convolutional features and metric learning for SAR image registration[J]. Cluster Computing, 2019, 22(2): 3103–3114. doi: 10.1007/s10586-018-1946-0.
[16]
FAN Jianwei, WU Yan, WANG Fan, et al. SAR image registration using phase congruency and nonlinear diffusion-based SIFT[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(3): 562–566. doi: 10.1109/LGRS.2014.2351396.
[17]
FAN Yibo, WANG Feng, and WANG Haipeng. A transformer-based coarse-to-fine wide-swath SAR image registration method under weak texture conditions[J]. Remote Sensing, 2022, 14(5): 1175. doi: 10.3390/rs14051175.
[18]
ELWAN M, AMEIN A S, MOUSA A, et al. SAR image matching based on local feature detection and description using convolutional neural network[J]. Security and Communication Networks, 2022, 2022(1): 5669069. doi: 10.1155/2022/5669069.
[19]
MEN Peng, GUO Hao, AN Jubai, et al. An improved L2Net for repetitive texture image registration with intensity difference heterogeneous SAR images[J]. Remote Sensing, 2022, 14(11): 2527. doi: 10.3390/rs14112527.
[20]
ZHANG Yifan, LI Zhiwei, WANG Wen, et al. A robust registration method for multi-view SAR images based on best buddy similarity[C]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Changsha, China, 2024: 881–886. doi: 10.5194/isprs-archives-XLVIII-1-2024-881-2024.
[21]
LI Zeyi, ZHANG Haitao, and HUANG Yihang. A rotation-invariant optical and SAR image registration algorithm based on deep and Gaussian features[J]. Remote Sensing, 2021, 13(13): 2628. doi: 10.3390/rs13132628.
[22]
YU Wei, SUN Xiaohuai, YANG Kuiyuan, et al. Hierarchical semantic image matching using CNN feature pyramid[J]. Computer Vision and Image Understanding, 2018, 169: 40–51. doi: 10.1016/j.cviu.2018.01.001.
[23]
SAUVALLE B and DE LA FORTELLE A. Unsupervised multi-object segmentation using attention and soft-argmax[C]. 2023 IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, USA, 2023: 3267–3276. doi: 10.1109/WACV56688.2023.00328.
[24]
NUNES C F G and PÁDUA F L C. A local feature descriptor based on Log-Gabor filters for keypoint matching in multispectral images[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(10): 1850–1854. doi: 10.1109/LGRS.2017.2738632.
[25]
HOSANG J, BENENSON R, and SCHIELE B. Learning non-maximum suppression[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 4507–4515. doi: 10.1109/CVPR.2017.685.
[26]
CHUNG S W, CHUNG J S, and KANG H G. Perfect match: Self-supervised embeddings for cross-modal retrieval[J]. IEEE Journal of Selected Topics in Signal Processing, 2020, 14(3): 568–576. doi: 10.1109/JSTSP.2020.2987720.
KILIÇARSLAN S and CELIK M. RSigELU: A nonlinear activation function for deep neural networks[J]. Expert Systems with Applications, 2021, 174: 114805. doi: 10.1016/j.eswa.2021.114805.
[29]
XU Jin, LI Zishan, DU Bowen, et al. Reluplex made more practical: Leaky ReLU[C]. 2020 IEEE Symposium on Computers and Communications, Rennes, France, 2020: 1–7. doi: 10.1109/ISCC50000.2020.9219587.
[30]
LI Jiayuan, HU Qingwu, and AI Mingyao. RIFT: Multi-modal image matching based on radiation-variation insensitive feature transform[J]. IEEE Transactions on Image Processing, 2020, 29: 3296–3310. doi: 10.1109/TIP.2019.2959244.
[31]
GERMAIN H, BOURMAUD G, and LEPETIT V. S2DNet: Learning image features for accurate sparse-to-dense matching[C]. The 16th European Conference on Computer Vision, Glasgow, UK, 2020: 626–643. doi: 10.1007/978-3-030-58580-8_37.
[32]
JAMIN A and HUMEAU-HEURTIER A. (Multiscale) cross-entropy methods: A review[J]. Entropy, 2019, 22(1): 45. doi: 10.3390/e22010045.
[33]
YAMADA M, SIGAL L, RAPTIS M, et al. Cross-domain matching with squared-loss mutual information[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1764–1776. doi: 10.1109/TPAMI.2014.2388235.
[34]
ZHU Li and ZHU Chunqiang. Application of Hausdorff distance in image matching[C]. 2014 IEEE Workshop on Electronics, Computer and Applications, Ottawa, Canada, 2014: 97–100. doi: 10.1109/IWECA.2014.6845566.
[35]
HE Yueping, WANG Xueqian, ZHANG Yiming, et al. A novel loss function for optical and SAR image matching: Balanced positive and negative samples[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4028805. doi: 10.1109/LGRS.2022.3225965.
[36]
JIA Weikuan, SUN Meili, LIAN Jian, et al. Feature dimensionality reduction: A review[J]. Complex & Intelligent Systems, 2022, 8(3): 2663–2693. doi: 10.1007/s40747-021-00637-x.
[37]
DETONE D, MALISIEWICZ T, and RABINOVICH A. SuperPoint: Self-supervised interest point detection and description[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, USA, 2018: 224–236. doi: 10.1109/CVPRW.2018.00060.
[38]
HAN Xufeng, LEUNG T, JIA Yangqing, et al. MatchNet: Unifying feature and metric learning for patch-based matching[C]. 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, USA, 2015: 3279–3286. doi: 10.1109/CVPR.2015.7298948.
[39]
HASHIMOTO M, ENOMOTO M, and FUKUSHIMA Y. Coseismic deformation from the 2008 Wenchuan, China, earthquake derived from ALOS/PALSAR images[J]. Tectonophysics, 2010, 491(1/4): 59–71. doi: 10.1016/j.tecto.2009.08.034.
[40]
GEUDTNER D, TORRES R, SNOEIJ P, et al. Sentinel-1 system capabilities and applications[C]. 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, Canada, 2014: 1457–1460. doi: 10.1109/IGARSS.2014.6946711.
LI Zhiyuan, GUO Jiayi, ZHANG Yueting, et al. A novel autofocus algorithm of ship target in SAR image based on the adaptive momentum estimation optimizer and space-variant minimum entropy criteria[J]. Journal of Radars, 2022, 11(1): 83–94. doi: 10.12000/JR21159.
SU Juan, LI Bin, and WANG Yanzhao. SAR image registration algorithm based on closed uniform regions[J]. Journal of Electronics & Information Technology, 2016, 38(12): 3282–3288. doi: 10.11999/JEIT160141.
ZHANG Jiaxiang, ZHANG Kaixiang, LIANG Zhennan, et al. An intelligent frequency decision method for a frequency agile radar based on deep reinforcement learning[J]. Journal of Radars, 2024, 13(1): 227–239. doi: 10.12000/JR23197
ZHANG Jiaxiang, ZHANG Kaixiang, LIANG Zhennan, et al. An intelligent frequency decision method for a frequency agile radar based on deep reinforcement learning[J]. Journal of Radars, 2024, 13(1): 227–239. doi: 10.12000/JR23197

 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work


 下载:
下载:






































































































 DownLoad:
DownLoad: