
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | YANG Lei, HUO Xin, SHEN Ruiyang, et al. Credible inference of near-field sparse array synthesis for three-dimensional millimeter-wave imagery[J]. Journal of Radars, 2024, 13(5): 1092–1108. doi: 10.12000/JR24097

|
Credible Inference of Near-field Sparse Array Synthesis for Three-dimensional Millimeter-wave Imagery(in English)
DOI: 10.12000/JR24097
More Information-
Abstract
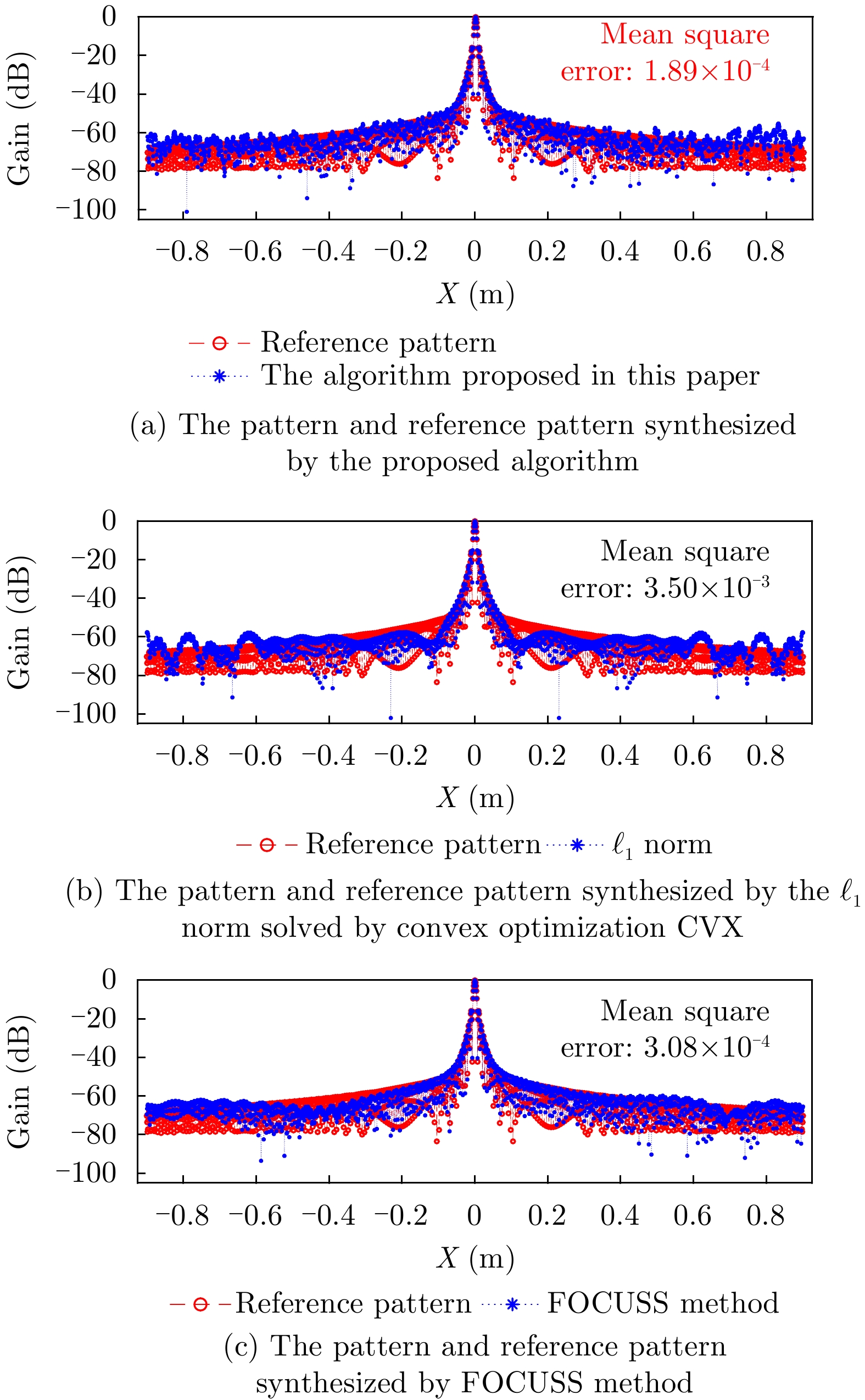
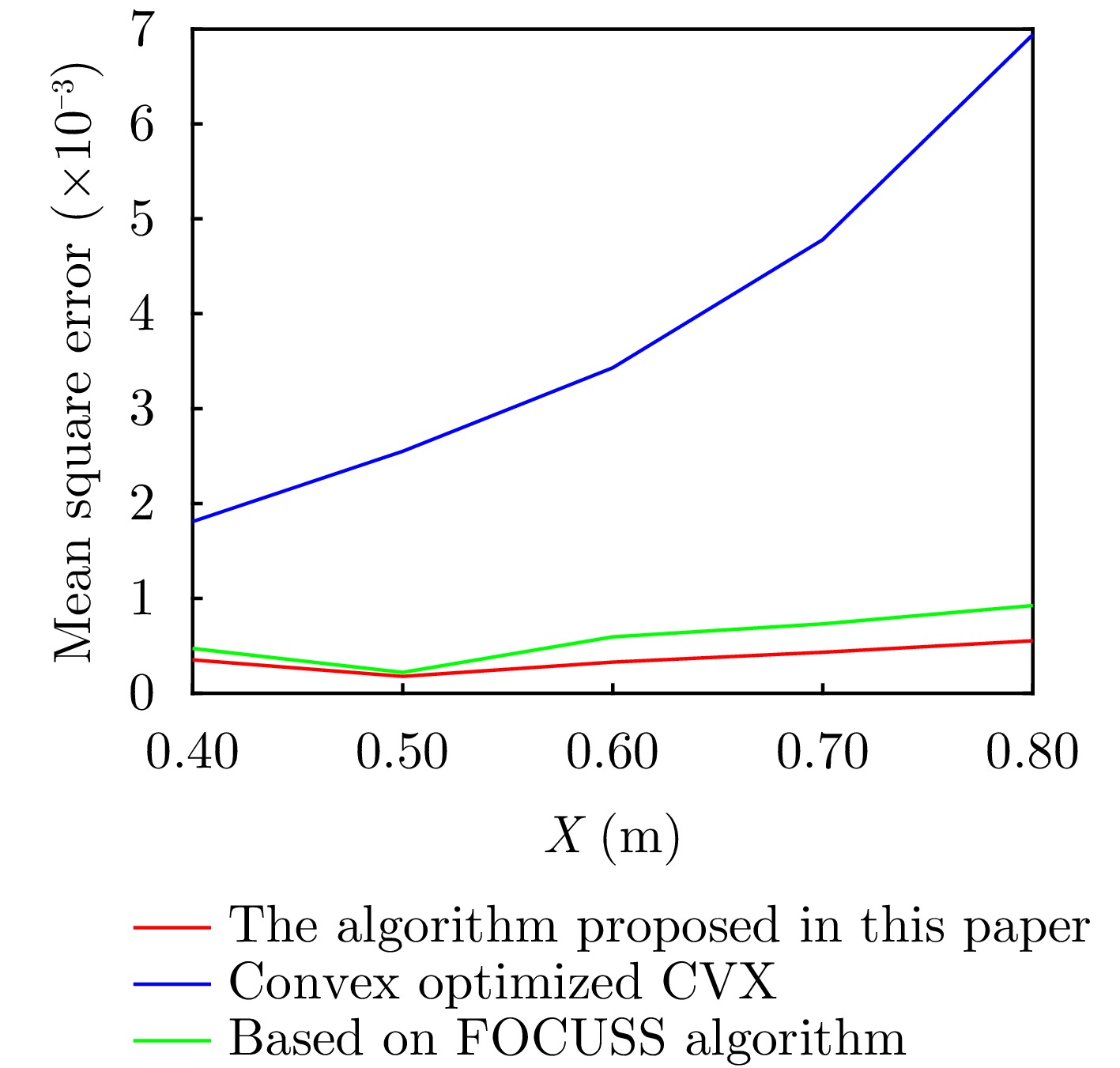
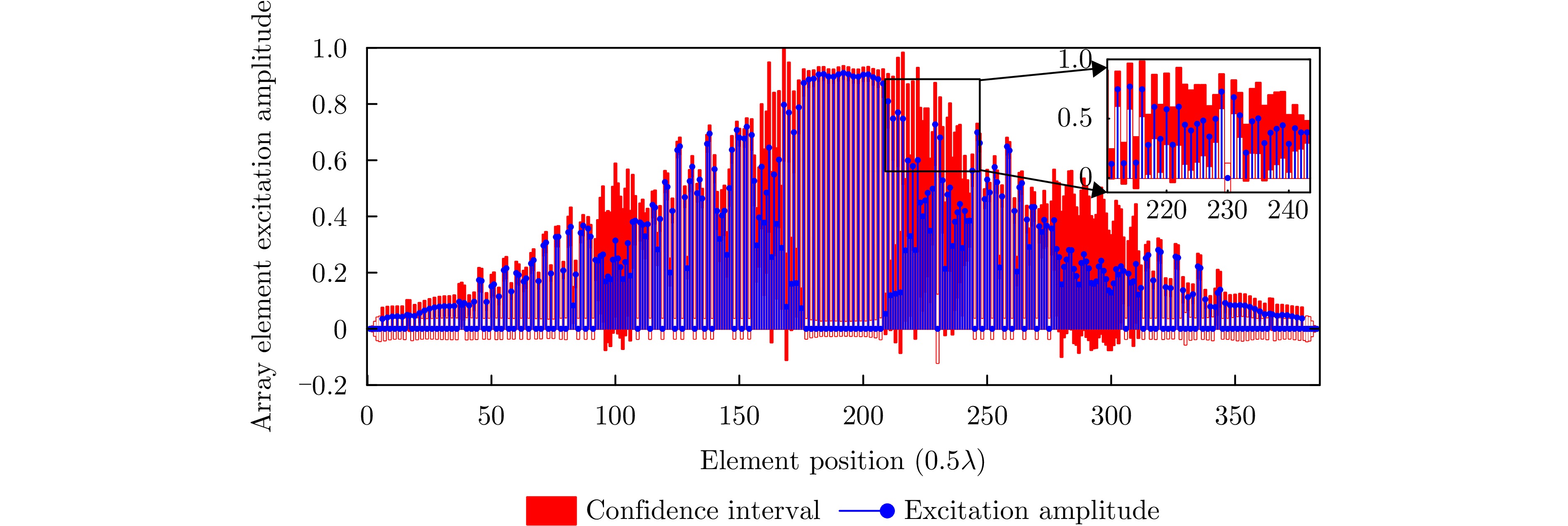
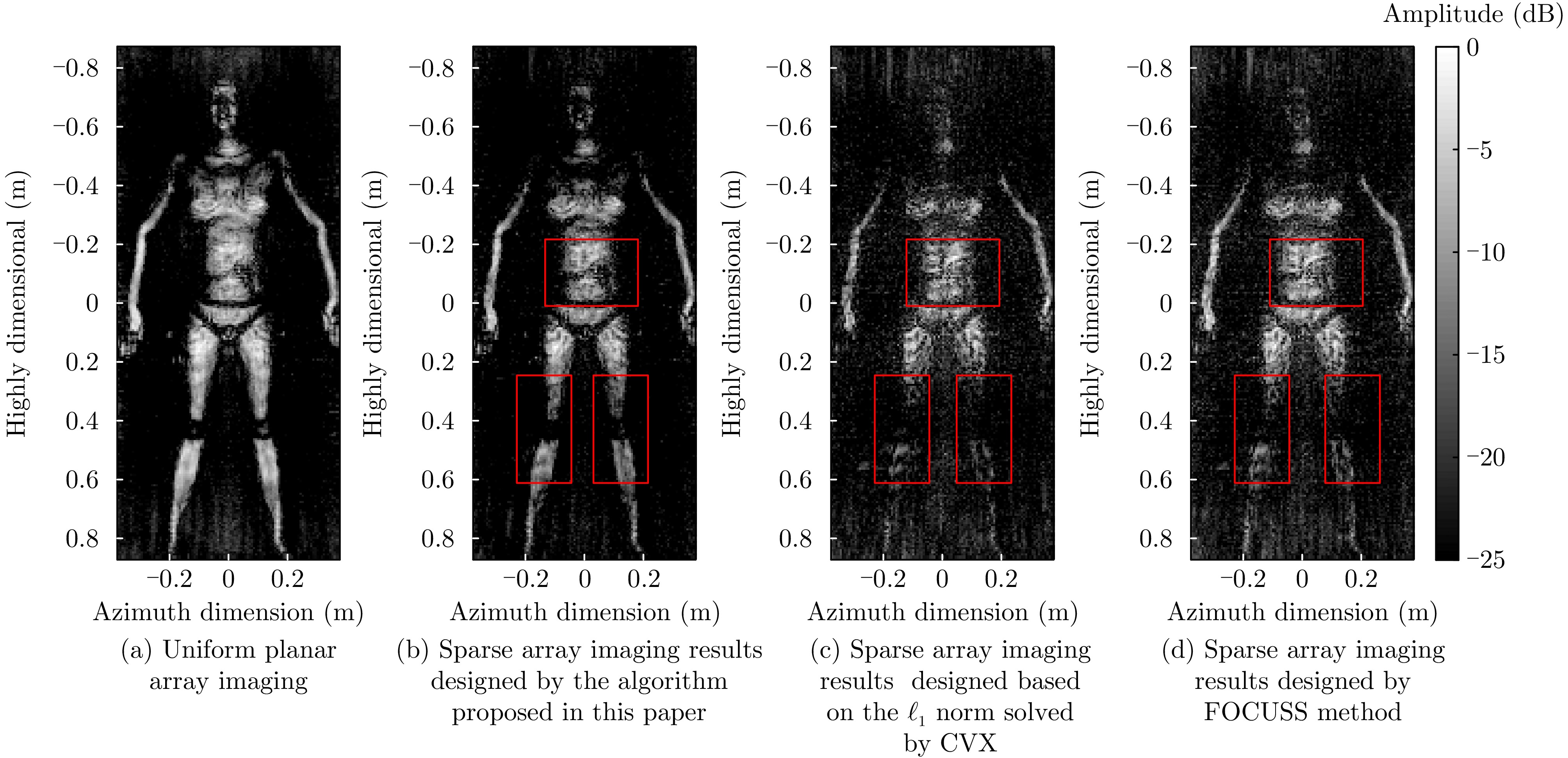
Due to the short wavelength of millimeter-wave, active electrical scanning millimeter-wave imaging system requires large imaging scenarios and high resolutions in practical applications. These requirements lead to a large uniform array size and high complexity of the feed network that satisfies the Nyquist sampling theorem. Accordingly, the system faces contradictions among imaging accuracy, imaging speed, and system cost. To this end, a novel, Credible Bayesian Inference of near-field Sparse Array Synthesis (CBI-SAS) algorithm is proposed under the framework of sparse Bayesian learning. The algorithm optimizes the complex-valued excitation weights based on Bayesian inference in a sparse manner. Therefore, it obtains the full statistical posterior Probability Density Function (PDF) of these weights. This enables the algorithm to utilize higher-order statistical information to obtain the optimal values, confidence intervals, and confidence levels of the excitation weights. In Bayesian inference, to achieve a small number of array elements to synthesize the desired beam orientation pattern, a heavy-tailed Laplace sparse prior is introduced to the excitation weights. However, considering that the prior probability model is not conjugated with the reference pattern data probability, the prior model is encoded in a hierarchical Bayesian manner so that the full posterior distribution can be represented in closed-form solutions. To avoid the high-dimensional integral in the full posterior distribution, a variational Bayesian expectation maximization method is employed to calculate the posterior PDF of the excitation weights, enabling reliable Bayesian inference. Simulation results show that compared with conventional sparse array synthesis algorithms, the proposed algorithm achieves lower element sparsity, a smaller normalized mean square error, and higher accuracy for matching the desired directional pattern. In addition, based on the measured raw data from near-field 1D electrical scanning and 2D plane electrical scanning, an improved 3D time domain algorithm is applied for 3D image reconstruction. Results verify that the proposed CBI-SAS algorithm can guarantee imaging results and reduce the complexity of the system. -

-
References
[1] 马宇欣, 海宇, 李中余, 等. 稀疏轨迹毫米波雷达三维高分辨成像算法[J]. 雷达学报, 2023, 12(5): 1000–1013. doi: 10.12000/JR23001.MA Yuxin, HAI Yu, LI Zhongyu, et al. 3D high-resolution imaging algorithm with sparse trajectory for millimeter-wave radar[J]. Journal of Radars, 2023, 12(5): 1000–1013. doi: 10.12000/JR23001.[2] MA Zhaohui, WANG Jingyang, JING Handan, et al. Millimeter wave security imaging based on single-channel MIMO radar[J]. Journal of Infrared and Millimeter Waves, 2020, 39(6): 709–717. doi: 10.11972/j.issn.1001-9014.2020.06.008.[3] 刘可, 朱泽政, 于军, 等. 基于互质阵列孔洞分析的稀疏阵列设计方法[J]. 电子与信息学报, 2022, 44(1): 372–379. doi: 10.11999/JEIT201024.LIU Ke, ZHU Zezheng, YU Jun, et al. Sparse array design methods based on hole analysis of the coprime array[J]. Journal of Electronics & Information Technology, 2022, 44(1): 372–379. doi: 10.11999/JEIT201024.[4] KARIMKASHI S and KISHK A A. Focused microstrip array antenna using a Dolph-Chebyshev near-field design[J]. IEEE Transactions on Antennas and Propagation, 2009, 57(12): 3813–3820. doi: 10.1109/TAP.2009.2033435.[5] 赵磊, 黄昆, 郝鑫, 等. 近场雷达成像非均匀稀疏阵设计[J]. 太赫兹科学与电子信息学报, 2017, 15(5): 707–710. doi: 10.11805/TKYDA201705.0707.ZHAO Lei, HUANG Kun, HAO Xin, et al. Non-uniform sparse array design in near field radar imaging[J]. Journal of Terahertz Science and Electronic Information Technology, 2017, 15(5): 707–710. doi: 10.11805/TKYDA201705.0707.[6] ZHAO Dongdong, LIU Xuesong, CHEN Wenyuan, et al. Optimized design for sparse cross arrays in both near-field and far-field[J]. IEEE Journal of Oceanic Engineering, 2019, 44(3): 783–795. doi: 10.1109/JOE.2018.2837458.[7] LEMAITRE-AUGER P, ABIELMONA S, and CALOZ C. Generation of Bessel beams by two-dimensional antenna arrays using sub-sampled distributions[J]. IEEE Transactions on Antennas and Propagation, 2013, 61(4): 1838–1849. doi: 10.1109/TAP.2012.2232263.[8] LI Pengfa, QU Shiwei, YANG Shiwen, et al. Focused array antenna based on subarrays[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 888–891. doi: 10.1109/LAWP.2016.2613887.[9] RUDOLPH D L and BAROTT W C. Reduction of near-field grating lobes in sparse linear phased arrays[C]. 2014 IEEE Antennas and Propagation Society International Symposium, Memphis, USA, 2014: 1155–1156. doi: 10.1109/APS.2014.6904904.[10] OLIVERI G and MASSA A. Bayesian compressive sampling for pattern synthesis with maximally sparse non-uniform linear arrays[J]. IEEE Transactions on Antennas and Propagation, 2011, 59(2): 467–481. doi: 10.1109/TAP.2010.2096400.[11] OLIVERI G, CARLIN M, and MASSA A. Complex-weight sparse linear array synthesis by Bayesian compressive sampling[J]. IEEE Transactions on Antennas and Propagation, 2012, 60(5): 2309–2326. doi: 10.1109/TAP.2012.2189742.[12] 杨磊, 陈英杰, 王腾腾, 等. 旅客人身时频调和型毫米波三维重建[J]. 红外与毫米波学报, 2023, 42(3): 327–338. doi: 10.11972/j.issn.1001-9014.2023.03.006.YANG Lei, CHEN Yingjie, WANG Tengteng, et al. Three-dimensional reconstruction algorithm for passengers based on time-frequency coordination[J]. Journal of Infrared and Millimeter Waves, 2023, 42(3): 327–338. doi: 10.11972/j.issn.1001-9014.2023.03.006.[13] 陈秀琴, 李跃华, 孔令雄. 毫米波近场成像及图像增强算法研究[J]. 微波学报, 2023, 39(S1): 324–327.CHEN Xiuqin, LI Yuehua, and KONG Lingxiong. Research on millimeter wave near field imaging and image enhancement algorithms[J]. Journal of Microwaves, 2023, 39(S1): 324–327.[14] 谢朋飞, 张磊, 吴振华. 融合ω-K和BP算法的圆柱扫描毫米波三维成像算法[J]. 雷达学报, 2018, 7(3): 387–394. doi: 10.12000/JR17112.XIE Pengfei, ZHANG Lei, and WU Zhenhua. A three-dimensional imaging algorithm fusion with ω-K and BP algorithm for millimeter-wave cylindrical scanning[J]. Journal of Radars, 2018, 7(3): 387–394. doi: 10.12000/JR17112.[15] LIN Zhenwei, CHEN Yaowu, LIU Xuesong, et al. Optimized design for sparse arrays in 3-D imaging sonar systems based on perturbed Bayesian compressive sensing[J]. IEEE Sensors Journal, 2020, 20(10): 5554–5565. doi: 10.1109/JSEN.2020.2971568.[16] 宋嘉奇, 陶海红. 一种稀布阵列天线的近场波束综合算法[J]. 西安电子科技大学学报: 自然科学版, 2018, 45(6): 14–18. doi: 10.3969/j.issn.1001-2400.2018.06.003.SONG Jiaqi and TAO Haihong. Near-field beam synthesis algorithm for sparse array antennas[J]. Journal of Xidian University: Natural Science, 2018, 45(6): 14–18. doi: 10.3969/j.issn.1001-2400.2018.06.003.[17] HUANG Zixuan and CHENG Yujian. Near-field pattern synthesis for sparse focusing antenna arrays based on Bayesian compressive sensing and convex optimization[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(10): 5249–5257. doi: 10.1109/TAP.2018.2860044.[18] KIM S, DONG H J, YU J W, et al. Phased array calibration system with high accuracy and low complexity[J]. Alexandria Engineering Journal, 2023, 69: 759–770. doi: 10.1016/j.aej.2023.02.026.[19] 祁峥东, 卢阳沂, 孔玥, 等. 基于多凸优化的稀疏线性阵列综合方法[J]. 雷达与对抗, 2019, 39(4): 21–24, 49. doi: 10.19341/j.cnki.issn.1009-0401.2019.04.006.QI Zhengdong, LU Yangyi, KONG Yue, et al. Synthesis of sparse linear arrays based on multi-convex optimization[J]. Radar & ECM, 2019, 39(4): 21–24, 49. doi: 10.19341/j.cnki.issn.1009-0401.2019.04.006.[20] BABACAN S D, MOLINA R, and KATSAGGELOS A K. Bayesian compressive sensing using Laplace priors[J]. IEEE Transactions on Image Processing, 2010, 19(1): 53–63. doi: 10.1109/TIP.2009.2032894.[21] LIU Ying, ZHANG Zongyu, ZHOU Chengwei, et al. Robust variational Bayesian inference for direction-of-arrival estimation with sparse array[J]. IEEE Transactions on Vehicular Technology, 2022, 71(8): 8591–8602. doi: 10.1109/TVT.2022.3173418.[22] ZHAO Xiaowen, YANG Qingshan, and ZHANG Yunhua. A hybrid method for the optimal synthesis of 3-D patterns of sparse concentric ring arrays[J]. IEEE Transactions on Antennas and Propagation, 2016, 64(2): 515–524. doi: 10.1109/TAP.2015.2504377.[23] 李浩林, 陈露露, 张磊, 等. 快速分解后向投影SAR成像的自聚焦算法研究[J]. 电子与信息学报, 2014, 36(4): 938–945. doi: 10.3724/SP.J.1146.2013.00011.LI Haolin, CHEN Lulu, ZHANG Lei, et al. Study of autofocus method for SAR imagery created by fast factorized backprojection[J]. Journal of Electronics & Information Technology, 2014, 36(4): 938–945. doi: 10.3724/SP.J.1146.2013.00011.[24] MA Chengzheng, YEO T S, LIU Zhoufeng, et al. Target imaging based on ℓ1ℓ0 norms homotopy sparse signal recovery and distributed MIMO antennas[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 3399–3414. doi: 10.1109/TAES.2015.140939.[25] 杨鹏, 闫飞, 张胜辉, 等. 基于FOCUSS算法的稀疏阵列综合[J]. 电子科技大学学报, 2014, 43(2): 203–206. doi: 10.3969/j.issn.1001-0548.2014.02.008.YANG Peng, YAN Fei, ZHANG Shenghui, et al. Sparse array synthesis based on FOCUSS algorithm[J]. Journal of University of Electronic Science and Technology of China, 2014, 43(2): 203–206. doi: 10.3969/j.issn.1001-0548.2014.02.008.[26] 邢孟道, 马鹏辉, 楼屹杉, 等. 合成孔径雷达快速后向投影算法综述[J]. 雷达学报, 2024, 13(1): 1–22. doi: 10.12000/JR23183.XING Mengdao, MA Penghui, LOU Yishan, et al. Review of fast back projection algorithmsin synthetic aperture radar[J]. Journal of Radars, 2024, 13(1): 1–22. doi: 10.12000/JR23183. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

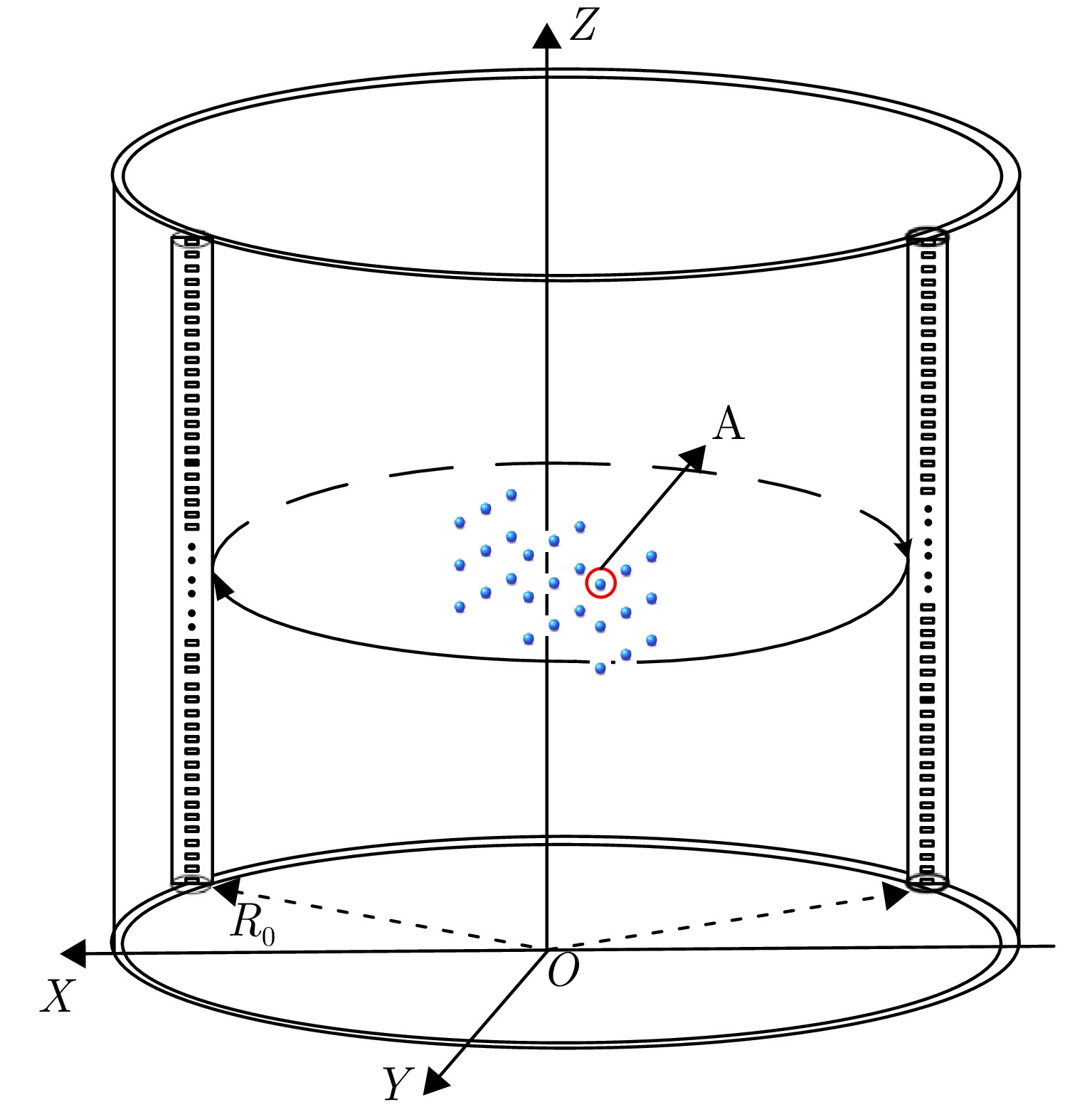
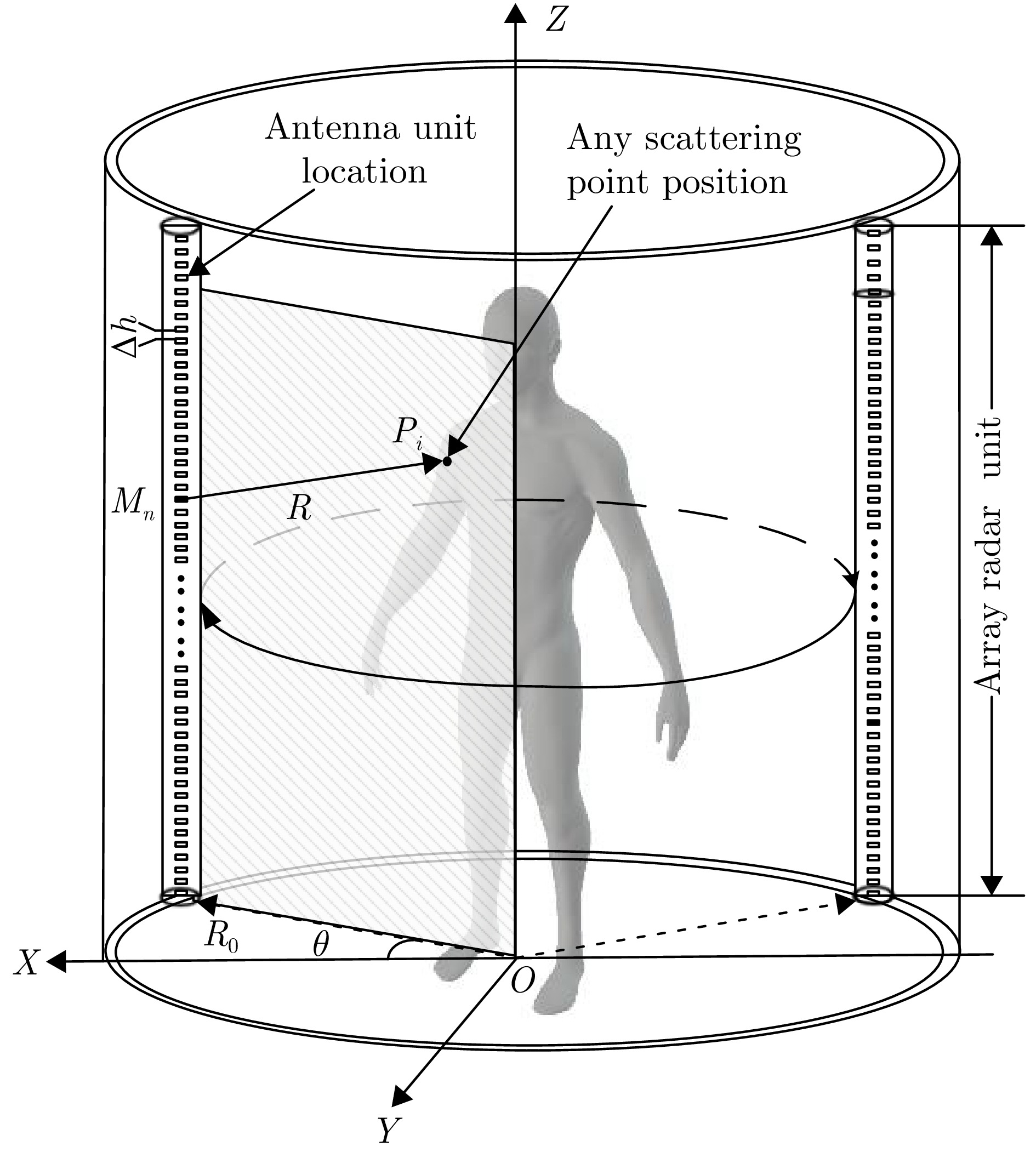



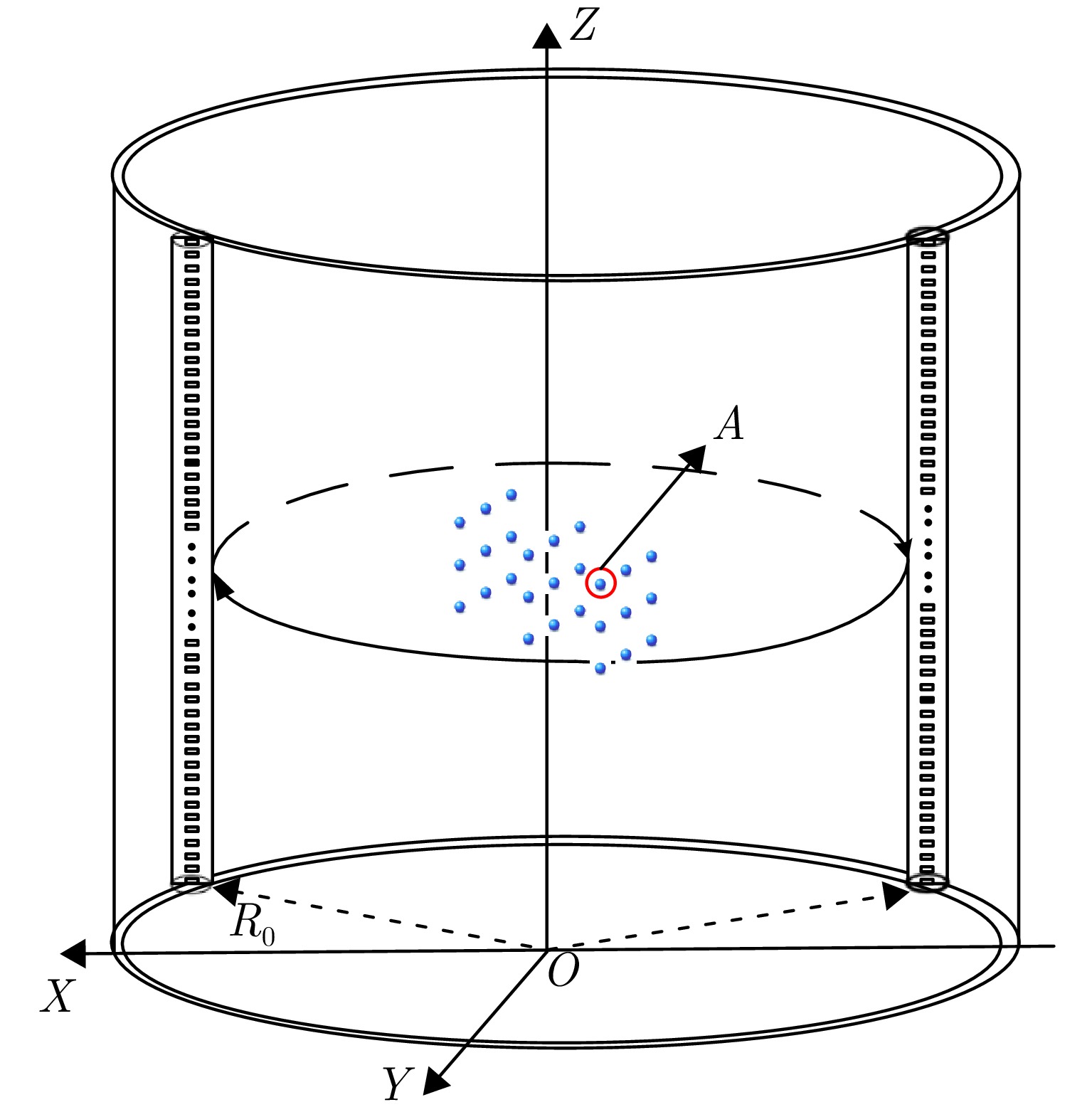

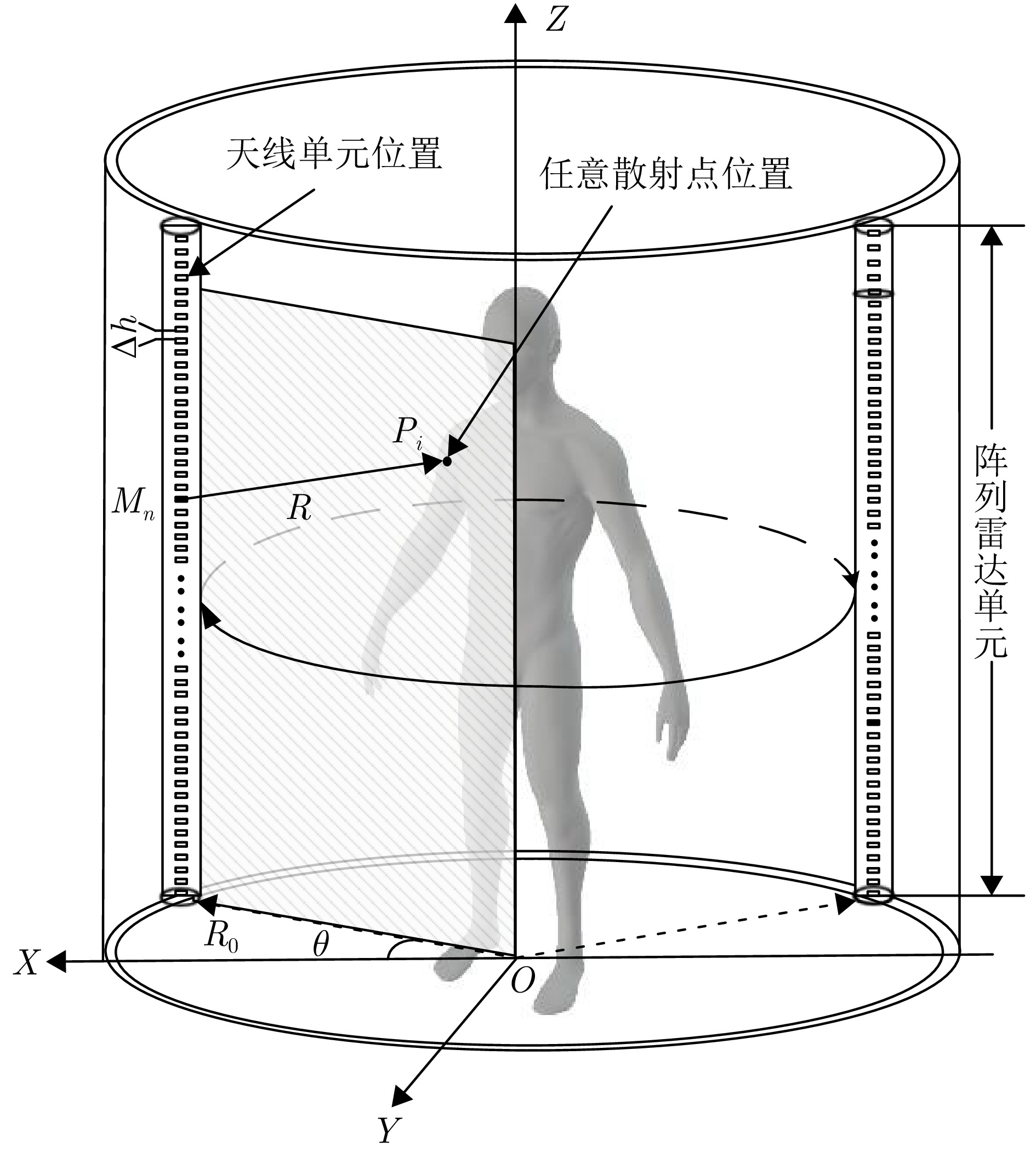
- Figure 1. Geometric model of millimeter-wave electric scanning circumferential 3D imaging system
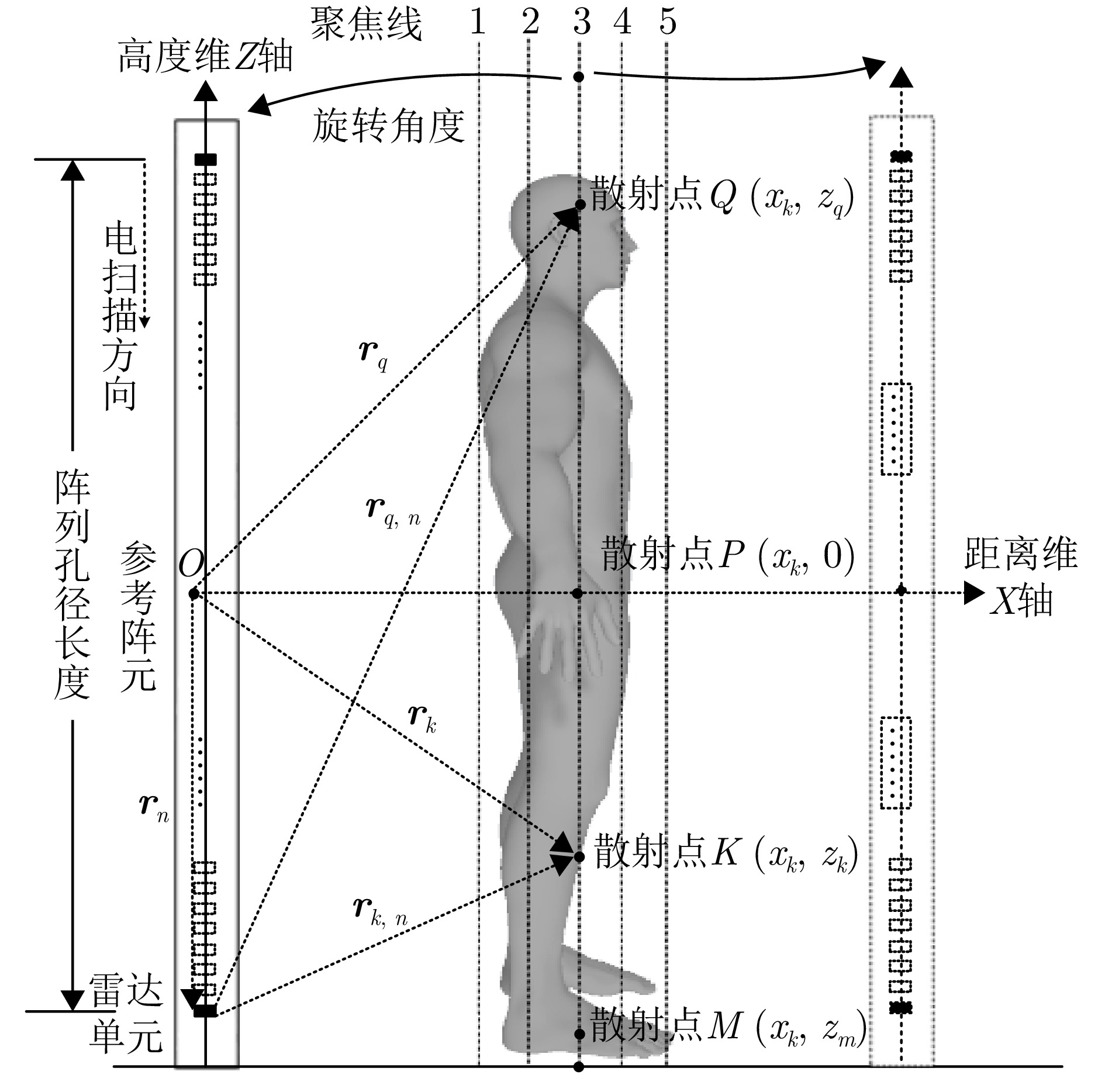
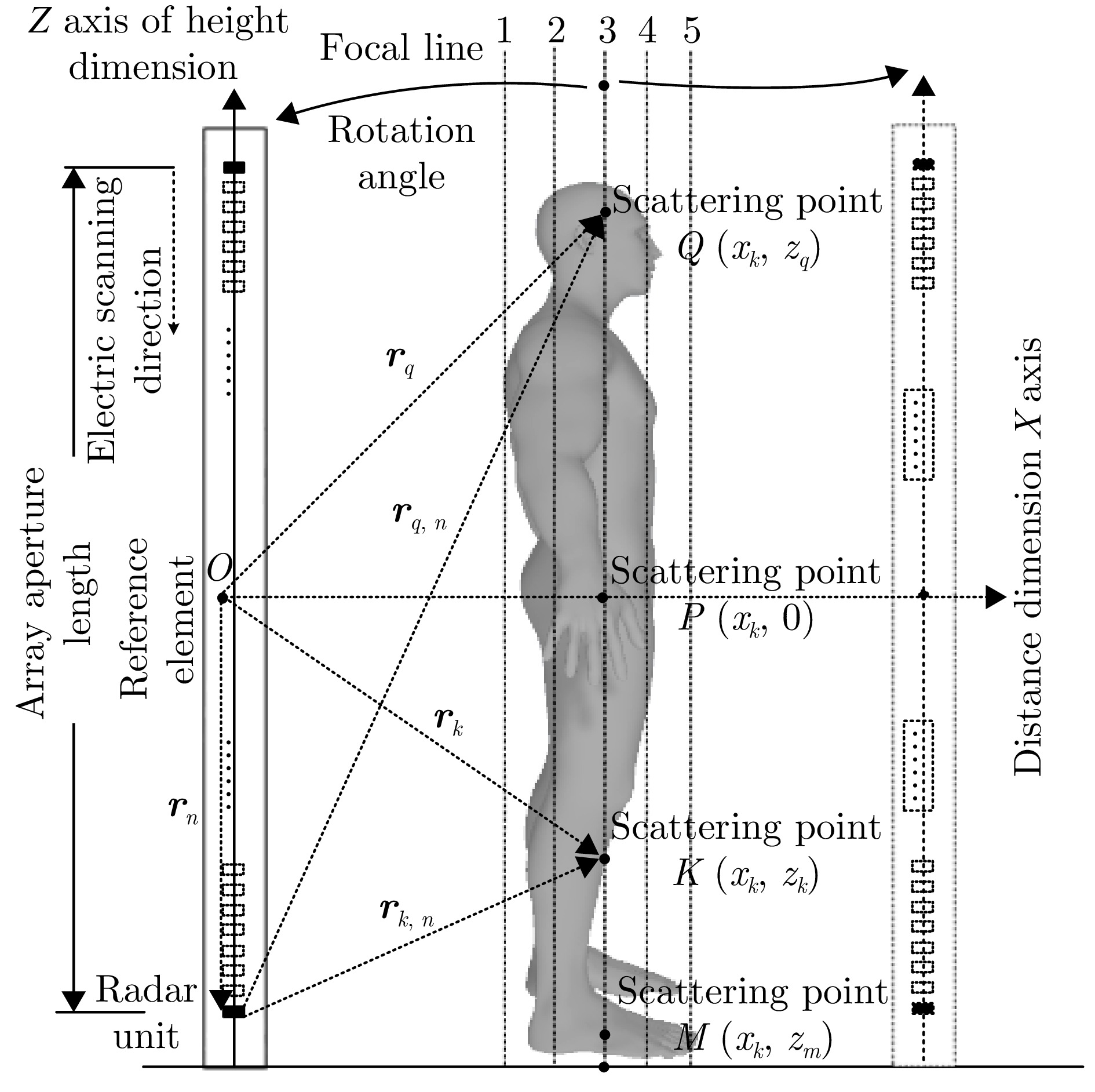
- Figure 2. Focusing model of near-field linear array in Cartesian coordinate system with arbitrary orientation
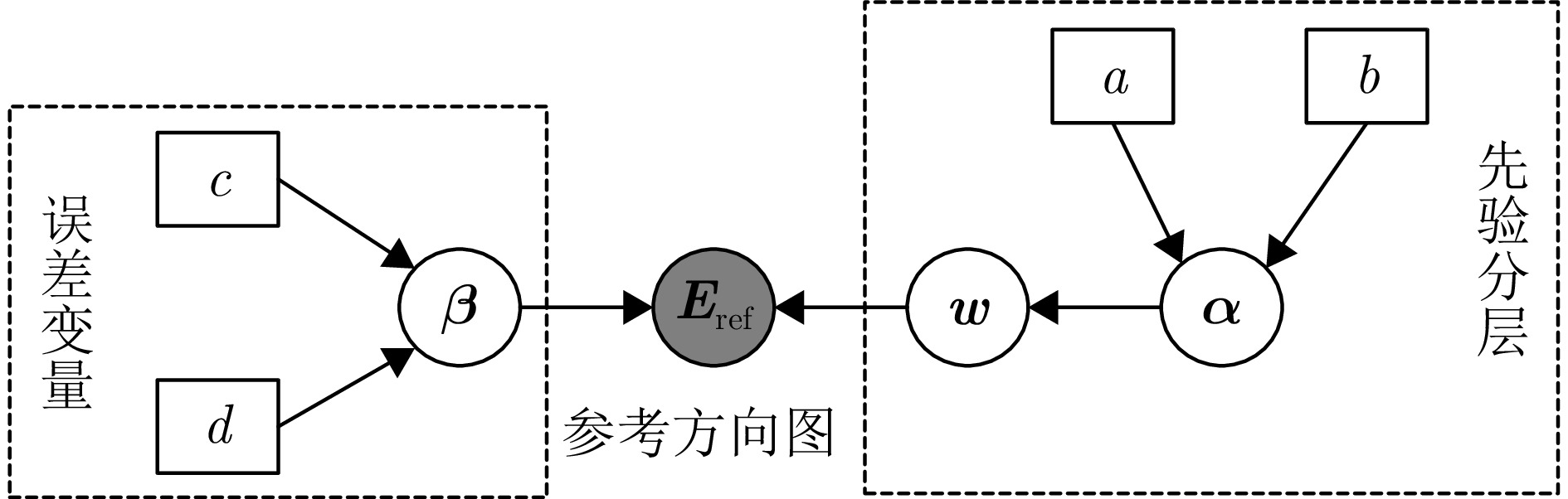
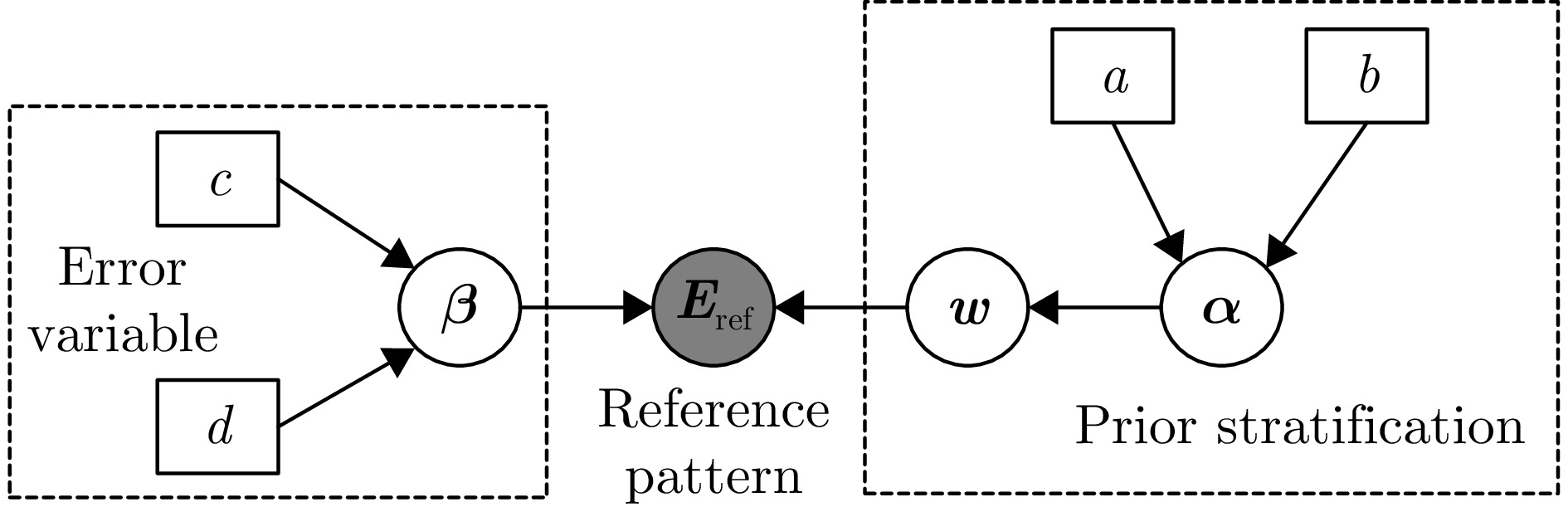
- Figure 3. Bayesian graphic model
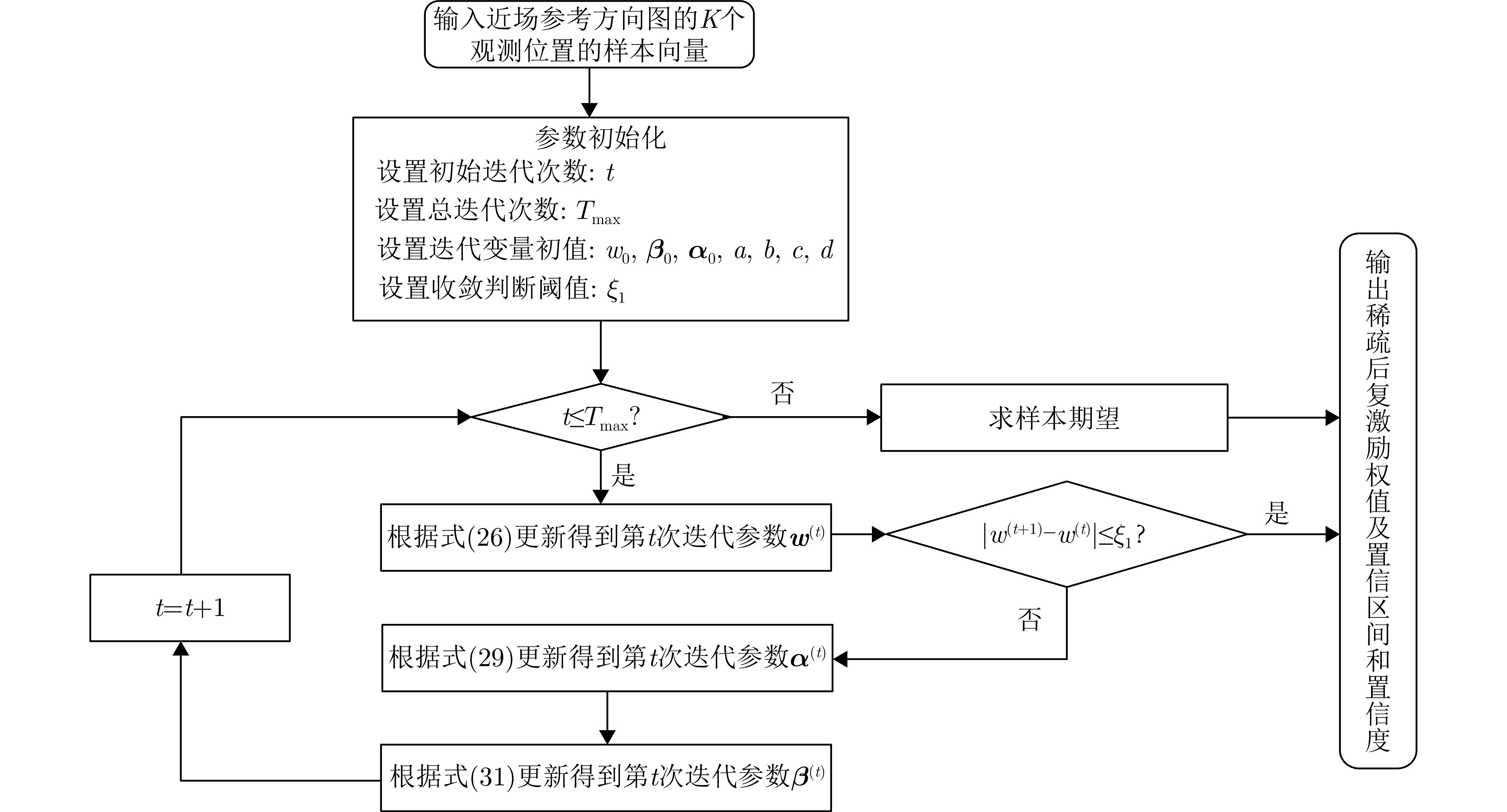
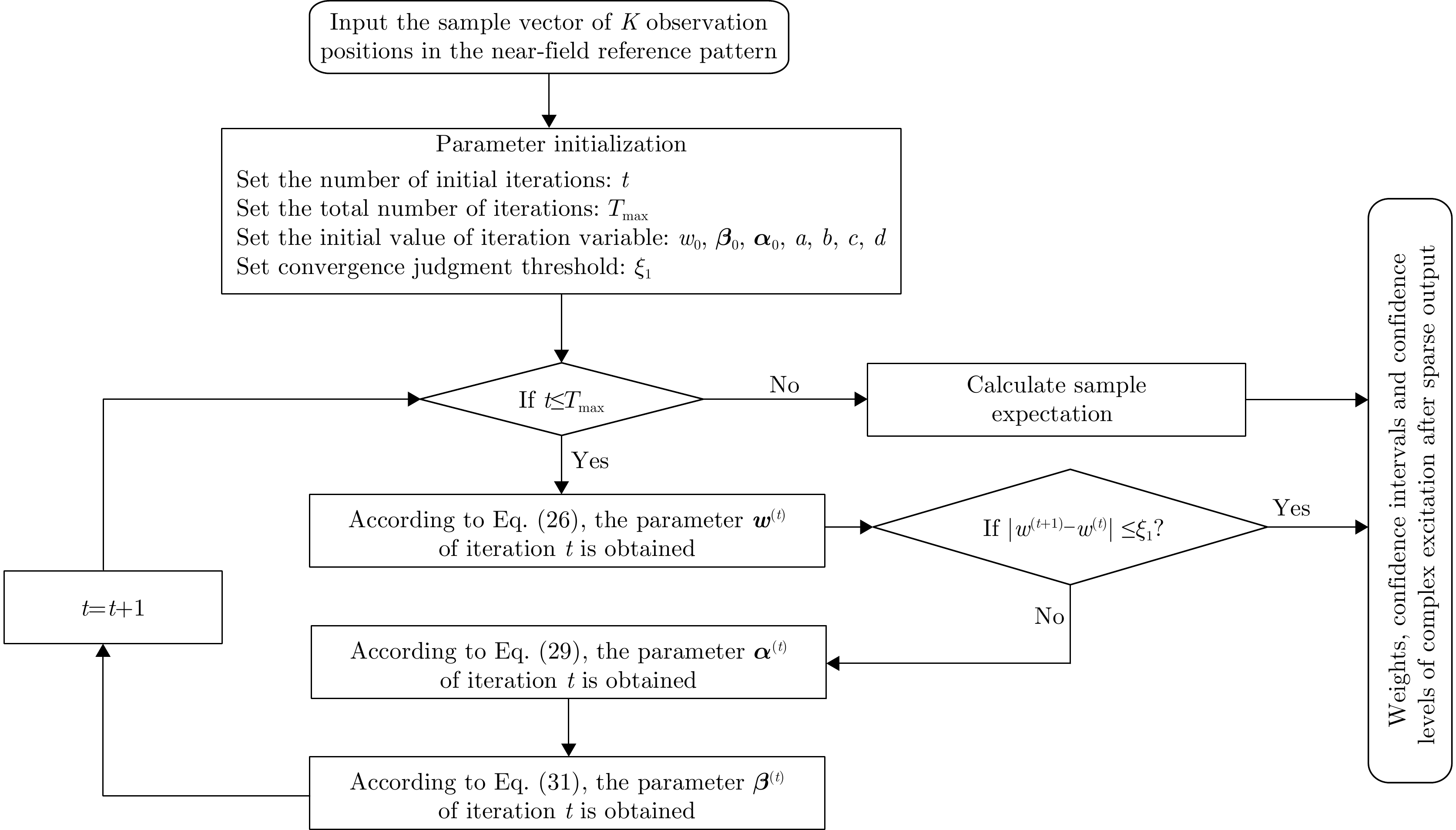
- Figure 4. Flow chart of near-field sparse array synthesis algorithm
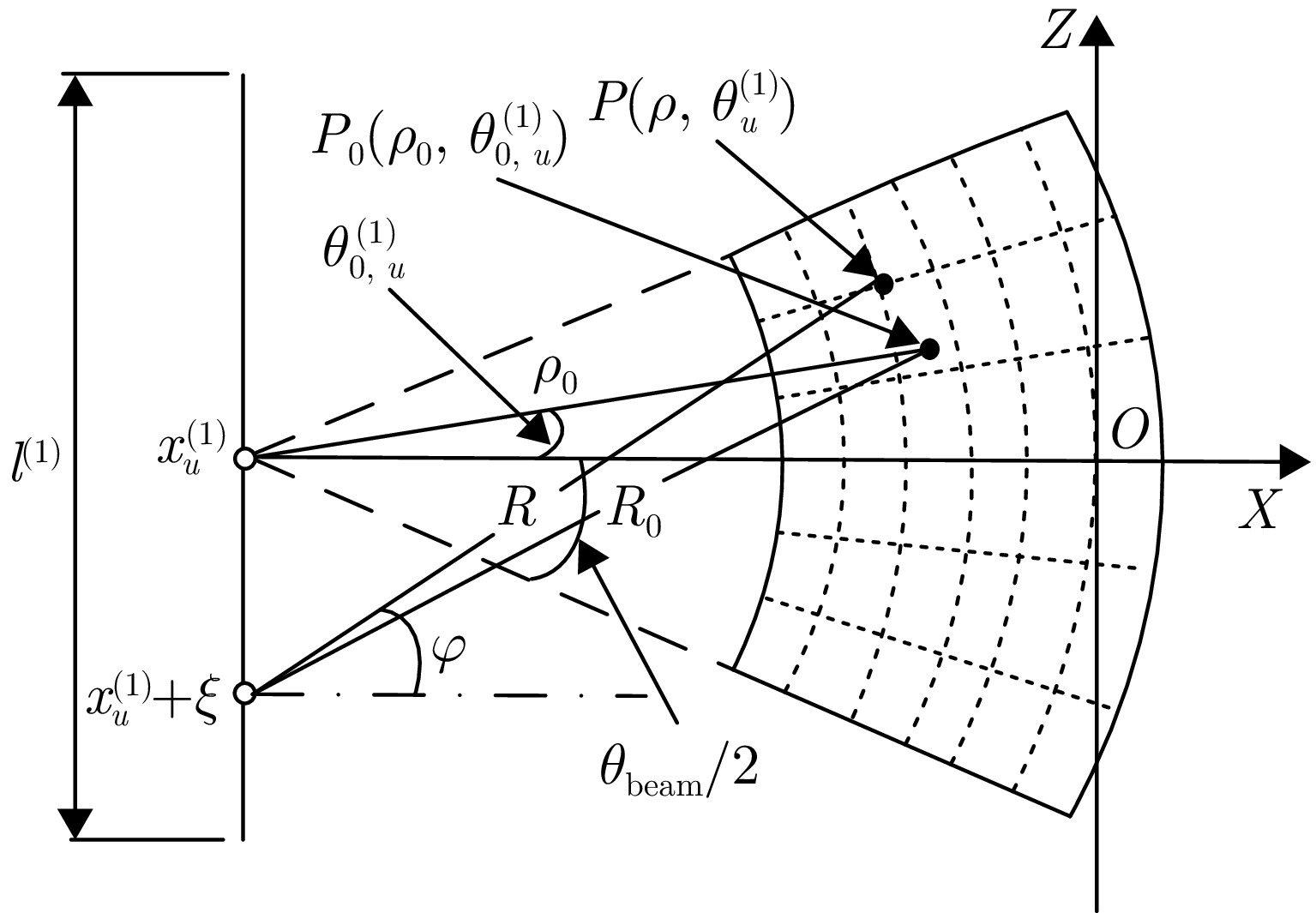
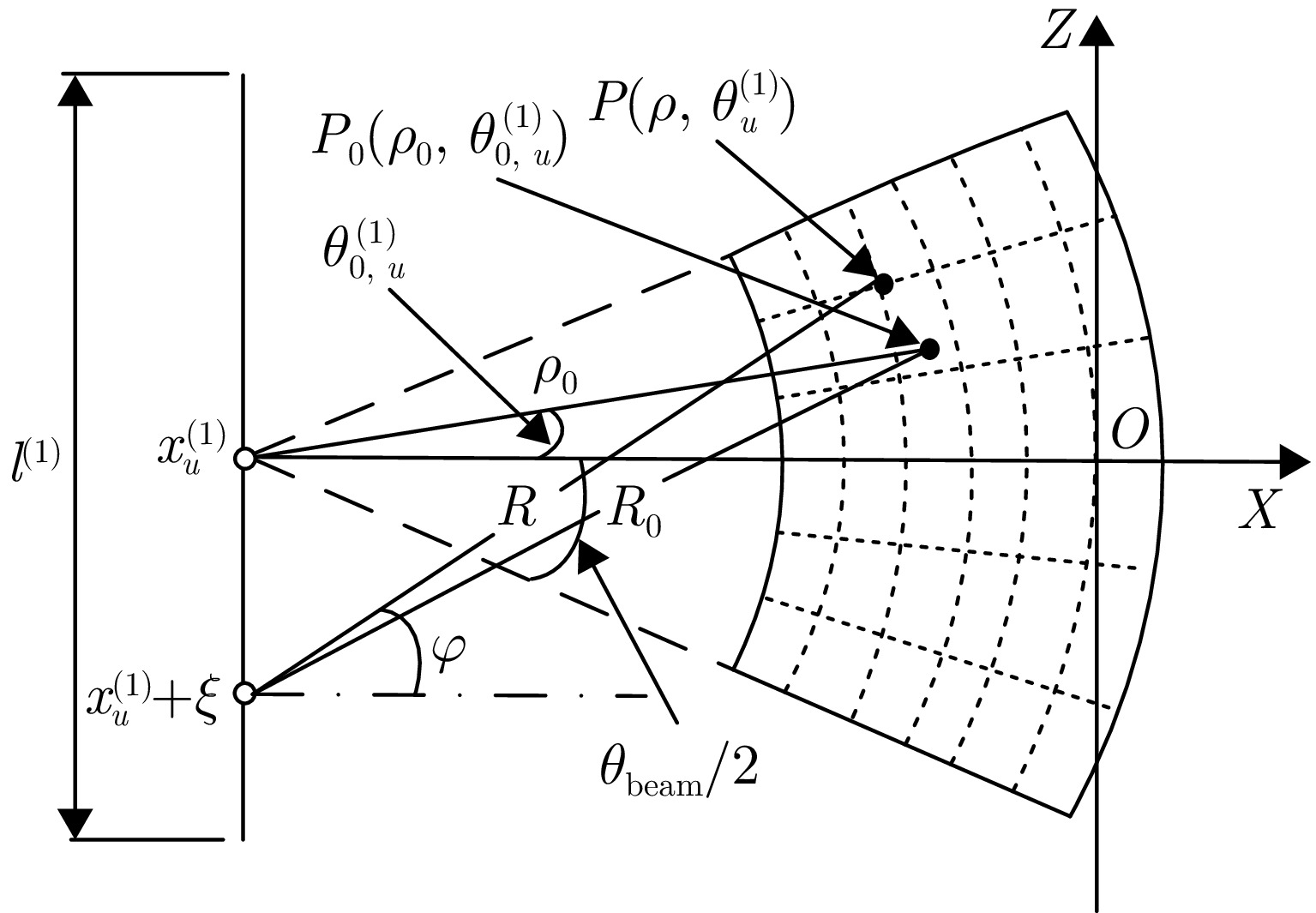
- Figure 5. The first stage of the u subaperture of the local polar grid
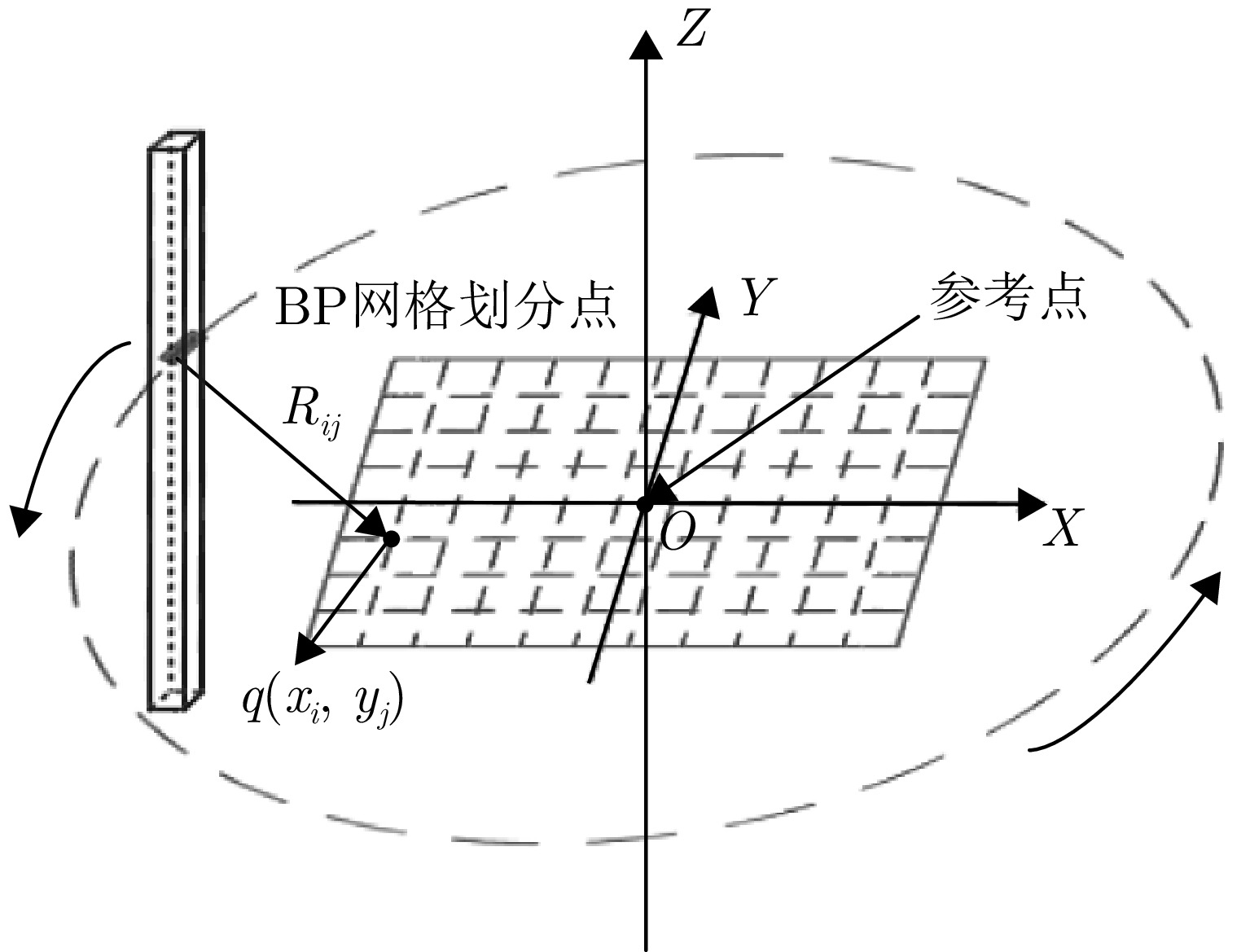
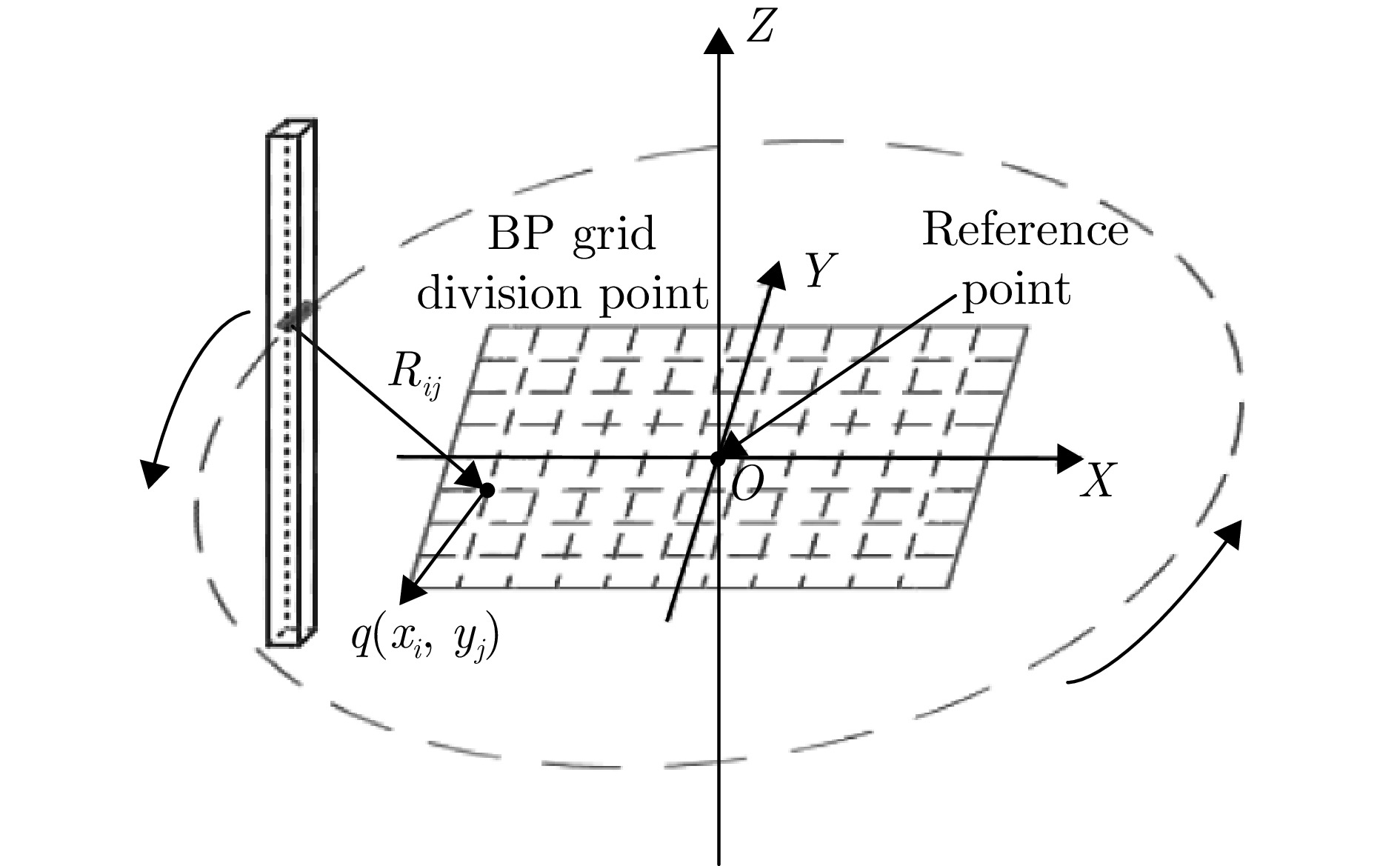
- Figure 6. Two-dimensional horizontal section grid diagram
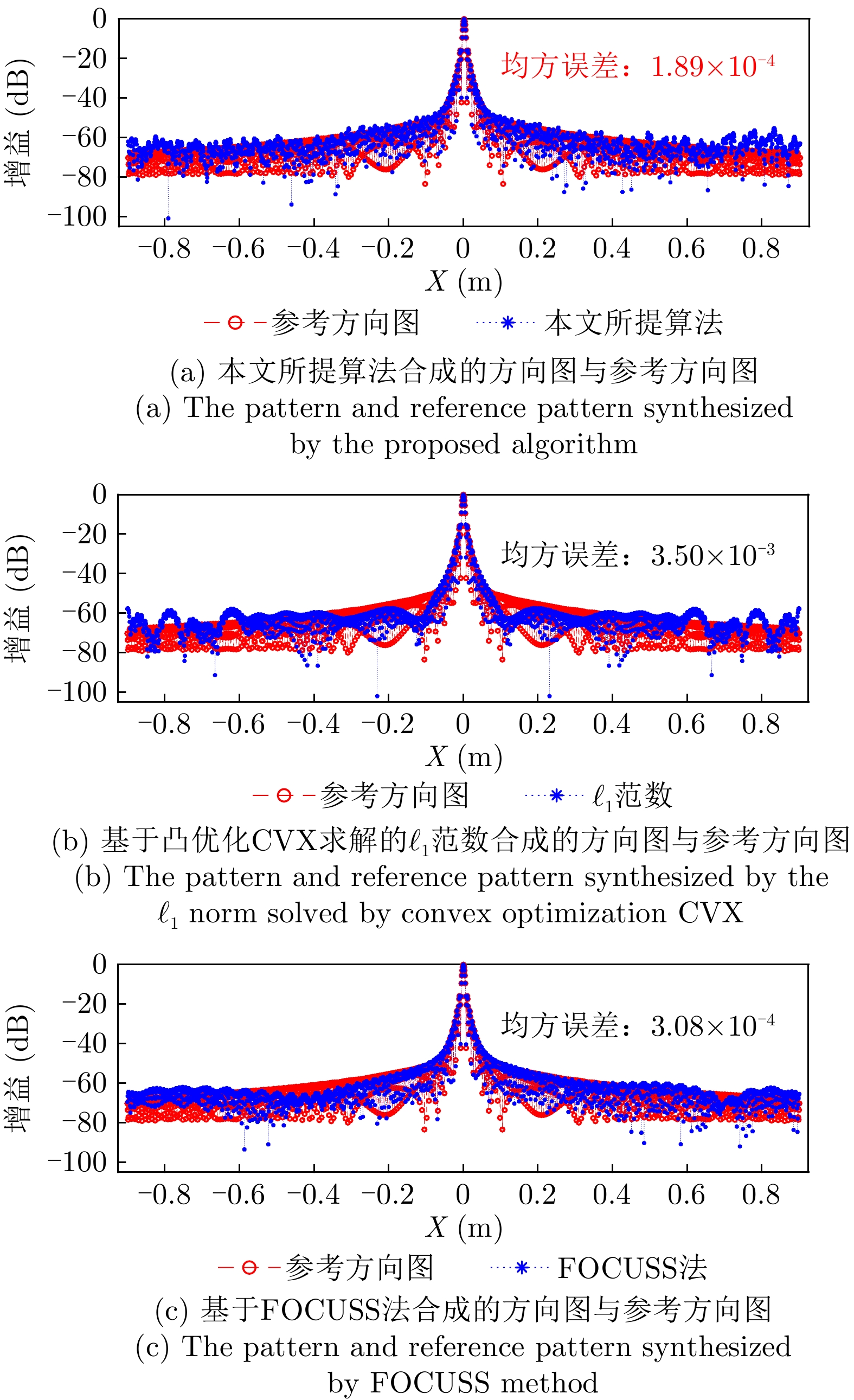
- Figure 7. The direction pattern of near-field antenna and the position and amplitude of near-field array under different algorithms
- Figure 8. The position and amplitude of near-field array under different algorithms
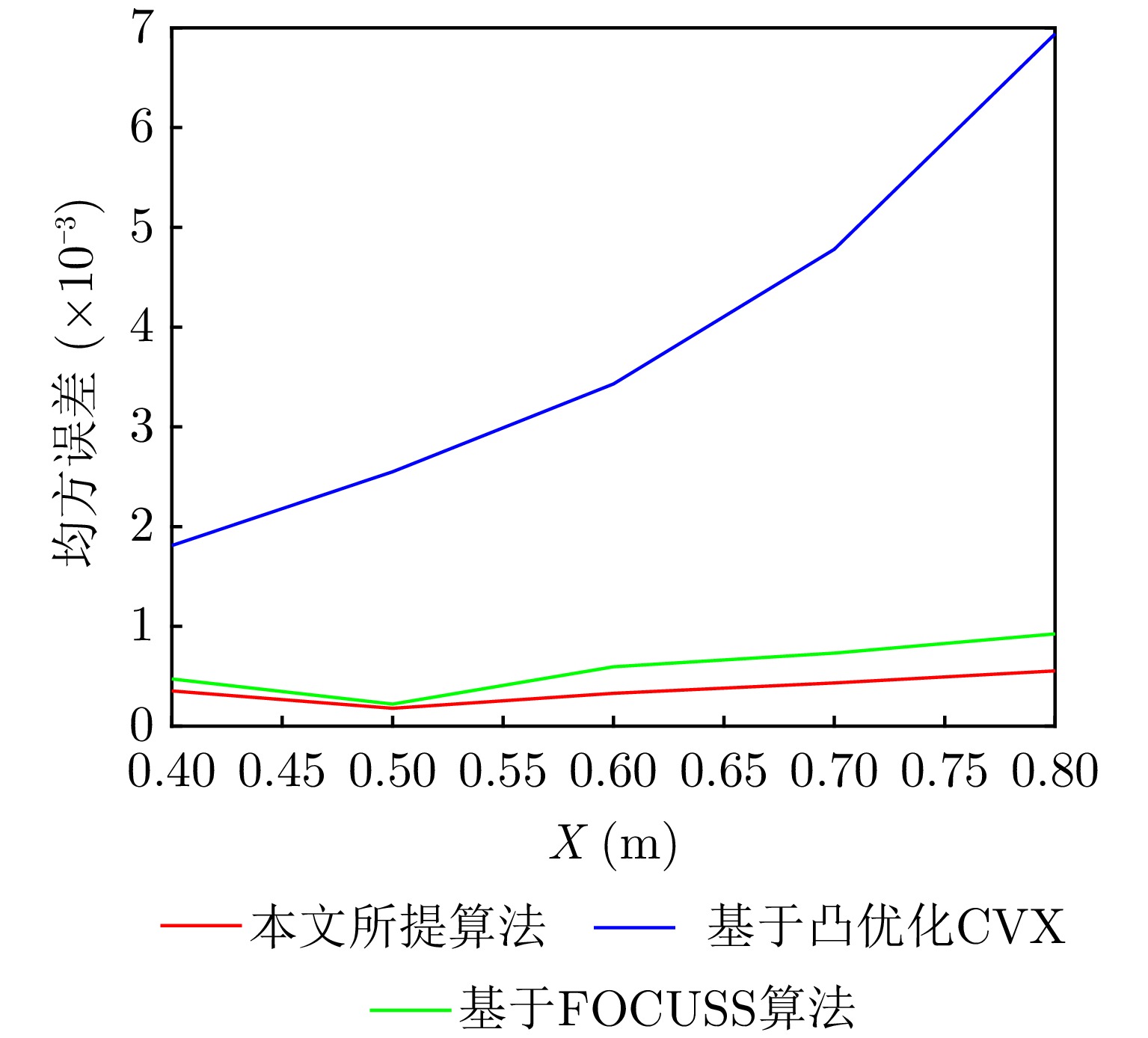
- Figure 9. Different algorithms match the mean square error comparison graph of reference direction graph under different aggregation line positions
- Figure 10. Confidence interval for the position and amplitude of near-field elements
- Figure 11. Comparison of imaging results obtained by circular linear sparse arrays designed by different methods under the same sparsity
- Figure 12. Comparison of imaging reaults obtained by full scanned planar sparse arrays designed by different methods under the same sparsity
- Figure 13. Comparison of side imaging results of circular linear sparse array designed by different methods at 15° orientation
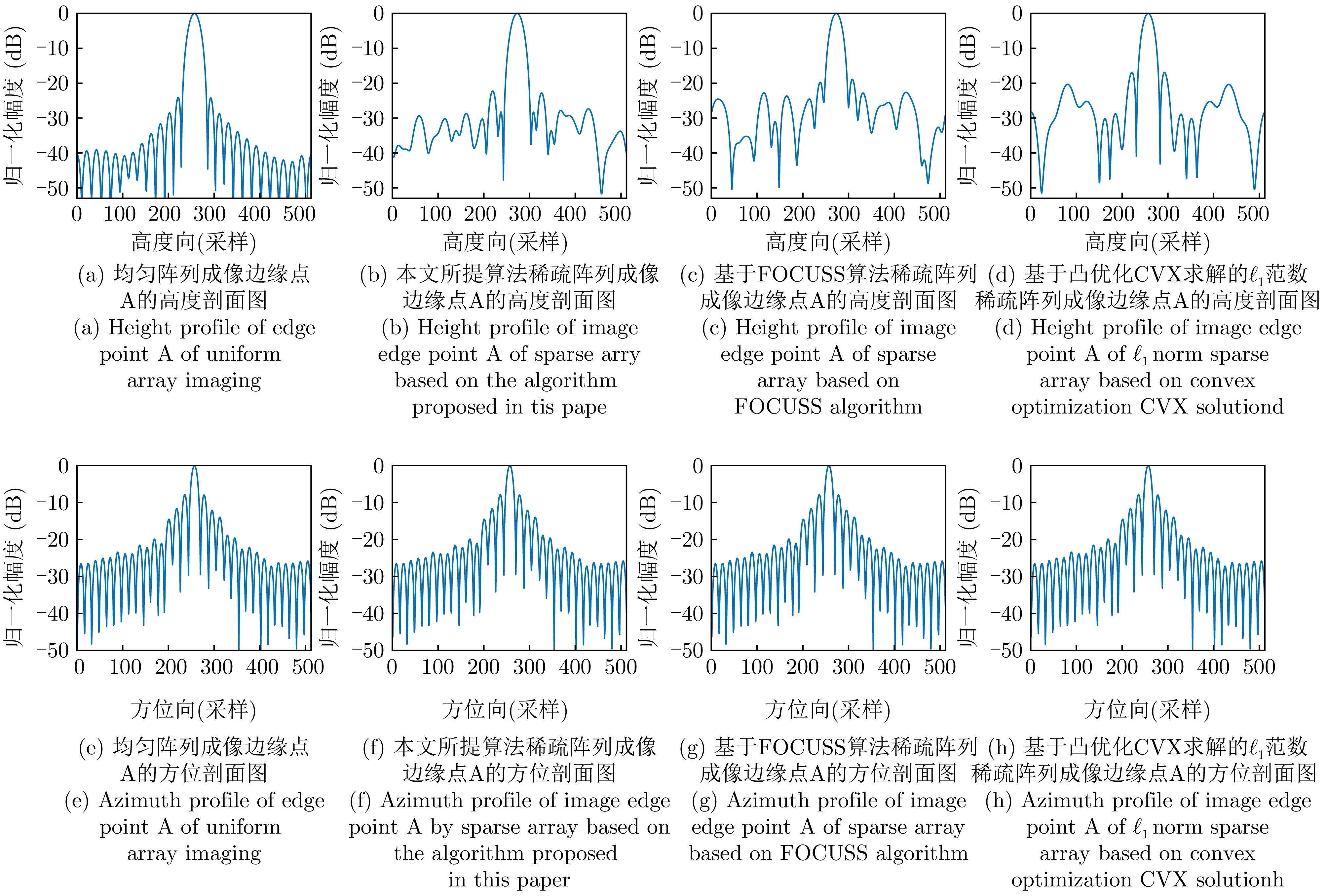
- Figure 14. Diagram of the position of edge point A
- Figure 15. Profile of edge points of imaging results of different sparse array synthesis algorithms
- Figure 1.
- Figure 2.
- Figure 3.
- Figure 4.
- Figure 5.
- Figure 6.
- Figure 7.
- Figure 8.
- Figure 9.
- Figure 10.
- Figure 11.
- Figure 12.
- Figure 13.
- Figure 14.
- Figure 15.