
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Hui Ye, Bai Xueru. RID Image Series-based High-resolution Three-dimensional Imaging of Micromotion Targets[J]. Journal of Radars, 2018, 7(5): 548-556. doi: 10.12000/JR18056

|
RID Image Series-based High-resolution Three-dimensional Imaging of Micromotion Targets
DOI: 10.12000/JR18056 CSTR: 32380.14.JR18056
-
Abstract
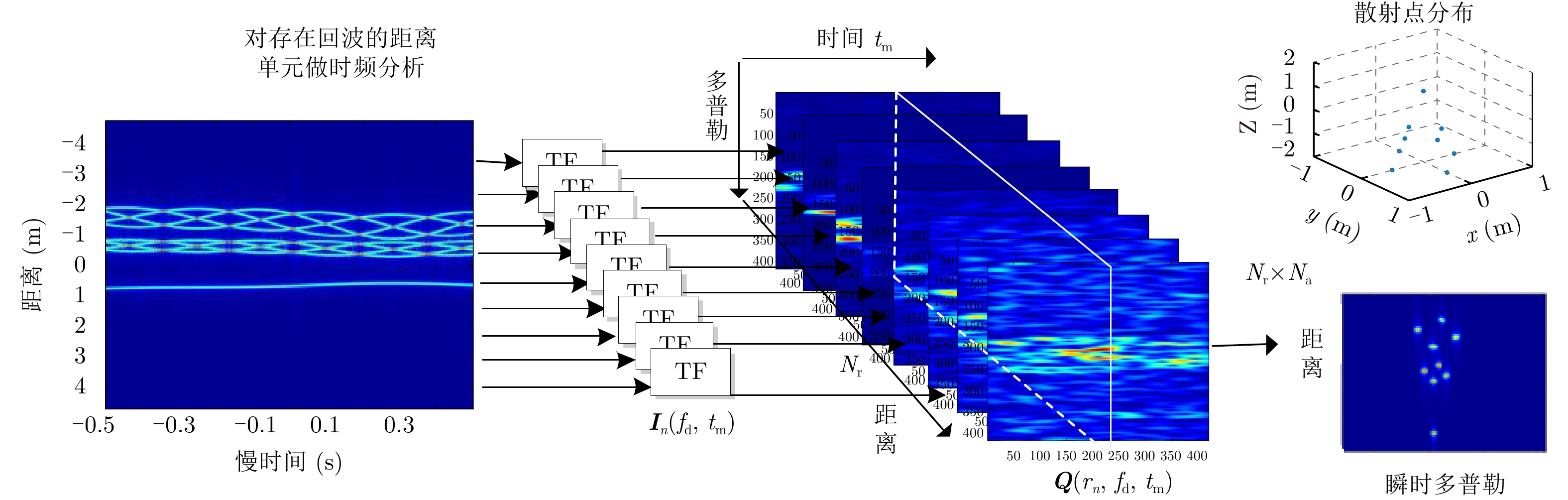
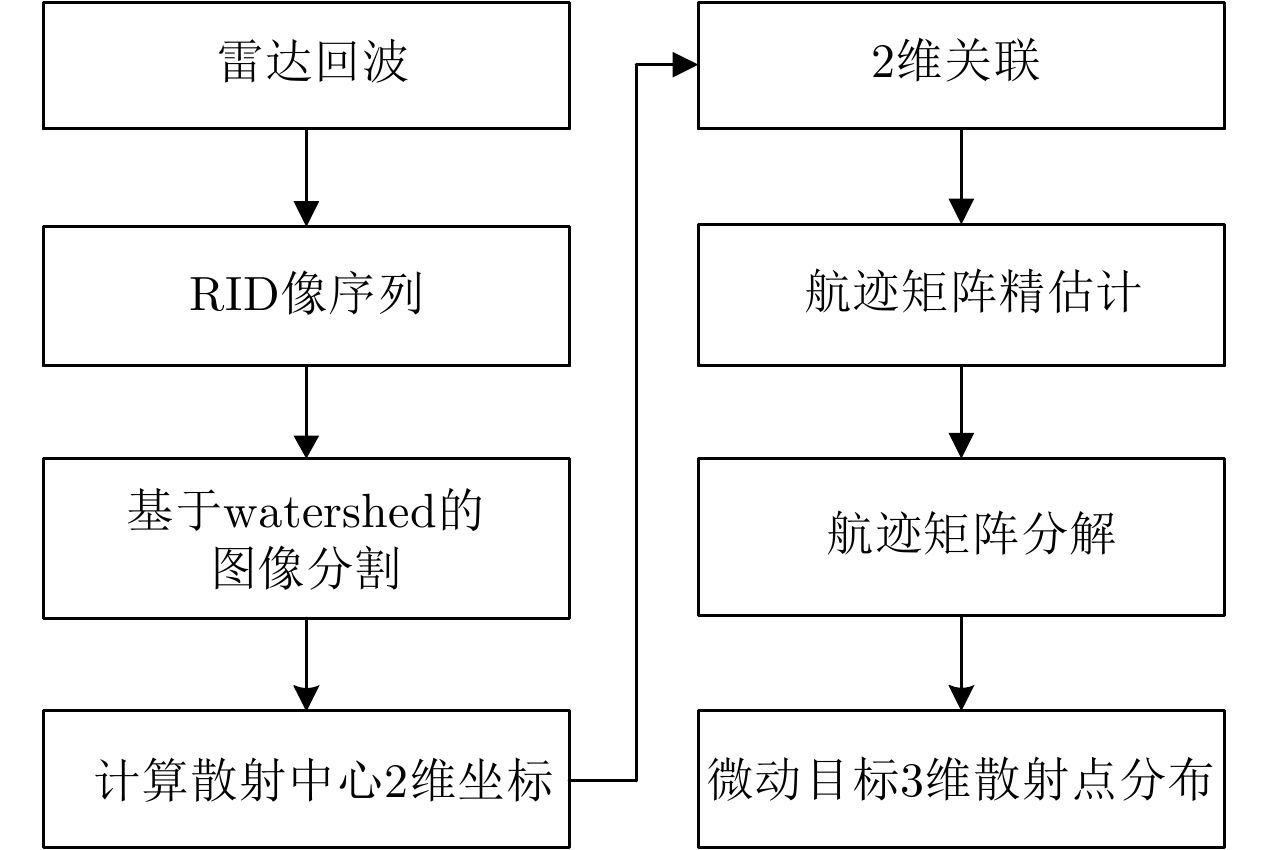
Micromotion refers to the small and non-uniform motion of the target or several target components along the radar line of sight. Using the high-resolution three-Dimensional (3D) Inverse Synthetic Aperture Radar (ISAR) imaging, the structural information and motion status of micromotion targets can be obtained, providing essential features for the detection, tracking, identification, and classification, which play important roles in the space situation awareness and ballistic missile defense. Given the complex micromotion forms and the non-stationary radar echoes, the available parametric ISAR imaging methods are no longer applicable. To overcome this limitation, this study aims to propose a high-resolution 3D imaging method for micromotion targets based on the scattering center trajectory matrix decomposition. First, the Range Instantaneous Doppler (RID) image series is generated to extract the support region of scattering centers by the watershed method. Then, the scattering center association is achieved based on the minimum Euclidean distance criterion. Considering the insufficient accuracy in the instantaneous slant range estimation with limited range resolution, a method for refined estimation of the trajectory matrix based on the modern spectrum analysis is proposed. Finally, the high-resolution 3D imaging of the micromotion targets is obtained by the trajectory matrix decomposition with constraints. The simulation results have demonstrated that the proposed method could effectively obtain high-resolution 3D imaging of the targets in complex micromotions such as nutation. -

-
References
[1] Chen V C, Li F Y, Ho S S, et al. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. DOI: 10.1109/TAES.2006.1603402[2] Chen V C. The Micro-Doppler Effect in Radar[M]. Boston: Artech House, 2011.[3] Brown W M and Fredricks R J. Range-Doppler imaging with motion through resolution cells[J]. IEEE Transactions on Aerospace and Electronic Systems, 1969, AES-5(1): 98–102. DOI: 10.1109/TAES.1969.309826[4] Carrara W G, Goodman R S, and Majewski R M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms[M]. Boston: Artech House, 1995.[5] 张翼, 朱玉鹏, 黎湘. 基于微多普勒特征的目标微动参数估计[J]. 信号处理, 2009, 25(7): 1120–1124. DOI: 10.3969/j.issn.1003-0530.2009.07.022Zhang Yi, Zhu Yu-peng, and Li Xiang. Micro-motion parameter estimation of ballistic missile target based on micro-Doppler feature[J]. Signal Processing, 2009, 25(7): 1120–1124. DOI: 10.3969/j.issn.1003-0530.2009.07.022[6] Wang T, Wang X S, Chang Y L, et al. Estimation of precession parameters and generation of ISAR images of ballistic missile targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 1983–1995. DOI: 10.1109/TAES.2010.5595608[7] Luo Y, Zhang Q, Qiu C W, et al. Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(4): 2087–2098. DOI: 10.1109/TGRS.2009.2034367[8] 邹小海, 艾小锋, 李永祯, 等. 基于微多普勒的圆锥弹头进动与结构参数估计[J]. 电子与信息学报, 2011, 33(10): 2413–2419. DOI: 10.3724/SP.J.1146.2011.00120Zou Xiao-hai, Ai Xiao-feng, Li Yong-zhen, et al. Precession and structural parameter estimation of the cone-shaped warhead based on the micro-Doppler[J]. Journal of Electronics&Information Technology, 2011, 33(10): 2413–2419. DOI: 10.3724/SP.J.1146.2011.00120[9] Luo Y, Zhang Q, Yuan N, et al. Three-dimensional precession feature extraction of space targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1313–1329. DOI: 10.1109/TAES.2014.110545[10] Zhang Q, Yeo T S, Tan H S, et al. Imaging of a moving target with rotating parts based on the Hough transform[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 291–299. DOI: 10.1109/TGRS.2007.907105[11] Gao H W, Xie L G, Wen S L, et al. Micro-Doppler signature extraction from ballistic target with micro-motions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 1969–1982. DOI: 10.1109/TAES.2010.5595607[12] Bai X R and Bao Z. High-resolution 3D imaging of precession cone-shaped targets[J]. IEEE Transactions on Antennas and Propagation, 2014, 62(8): 4209–4219. DOI: 10.1109/TAP.2014.2329004[13] Bai X R and Bao Z. Imaging of rotation-symmetric space targets based on electromagnetic modeling[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(3): 1680–1689. DOI: 10.1109/TAES.2014.120772[14] Bai X R and Bao Z. High-resolution radar imaging of aerospace targets with micromotion[C]. Proceedings of 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 2014: 934–937. DOI: 10.1109/IGARSS.2014.6946579.[15] Chen V C and Ling H. Time-Frequency Transforms for Radar Imaging and Signal Analysis[M]. Boston, MA, USA: Artech House, 2002.[16] Tomasi C and Kanade T. Shape and motion from image streams under orthography: A factorization method[J]. International Journal of Computer Vision, 1992, 9(2): 137–154. DOI: 10.1007/BF00129684[17] Bai X R, Zhou F, and Bao Z. High-resolution radar imaging of space targets based on HRRP series[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(5): 2369–2381. DOI: 10.1109/TGRS.2013.2260342[18] Chen V C and Qian S. Joint time-frequency transform for radar range-Doppler imaging[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(2): 486–499. DOI: 10.1109/7.670330[19] Chen V C. Adaptive time-frequency ISAR processing[C]. Proceedings Volume 2845, Radar Processing, Technology, and Applications, Denver, CO, United States, 1996. DOI: 10.1117/12.257216.[20] Chen V C. Radar detection of multiple moving targets in clutter using time-frequency radon transform[C]. Proceedings Volume 4728, Signal and Data Processing of Small Targets 2002, Orlando, FL, United States, 2002. DOI: 10.1117/12.478534.[21] Bai X R, Zhou F, and Bao Z. High-resolution three-dimensional imaging of space targets in micromotion[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(7): 3428–3440. DOI: 10.1109/JSTARS.2015.2431119[22] Wang Q, Xing M D, Lu G Y, et al. SRMF-CLEAN imaging algorithm for space debris[J]. IEEE Transactions on Antennas and Propagation, 2007, 55(12): 3524–3533. DOI: 10.1109/TAP.2007.910343[23] Wang Q, Xing M D, Lu G Y, et al. High-resolution three-dimensional radar imaging for rapidly spinning targets[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(1): 22–30. DOI: 10.1109/TGRS.2007.909086[24] Bai X R, Xing M D, Zhou F, et al. High-resolution three-dimensional imaging of spinning space debris[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(4): 2352–2362. DOI: 10.1109/TGRS.2008.2010854[25] Chen V C. Reconstruction of inverse synthetic aperture radar image using adaptive time-frequency wavelet transform[C]. Proceedings Volume 2491, Wavelet Applications II, Orlando, FL, United States, 1995, DOI: 10.1117/12.205404.[26] Ferrara M, Arnold G, and Stuff M. Shape and motion reconstruction from 3D-to-1D orthographically projected data via object-image relations[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(10): 1906–1912. DOI: 10.1109/TPAMI.2008.294[27] Mayhan J T, Burrows M L, Cuomo K M, et al. High resolution 3D " Snapshot” ISAR imaging and feature extraction[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(2): 630–642. DOI: 10.1109/7.937474[28] Burrows M L. Two-dimensional ESPRIT with tracking for radar imaging and feature extraction[J]. IEEE Transactions on Antennas and Propagation, 2004, 52(2): 524–532. DOI: 10.1109/TAP.2003.822411[29] Grewal M S and Andrews A P. Kalman Filtering, Theory and Practice Using MATLAB[M]. New York, USA: Wiley, 2001.[30] Allen J. Short term spectral analysis, synthesis, and modification by discrete Fourier transform[J]. IEEE Transactions on Acoustics,Speech,and Signal Processing, 1977, 25(3): 235–238. DOI: 10.1109/TASSP.1977.1162950[31] Vincent L and Soille P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1991, 13(6): 583–598. DOI: 10.1109/34.87344[32] Stoica P and Moses R L. Spectral Analysis of Signals[M]. Upper Saddle River, NJ: Prentice Hall, 2005.[33] Liu H C, Jiu B, Liu H W, et al. Superresolution ISAR imaging based on sparse Bayesian learning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 5005–5013. DOI: 10.1109/TGRS.2013.2286402[34] Li H T, Wang C Y, Wang K, et al. High resolution range profile of compressive sensing radar with low computational complexity[J]. IET Radar,Sonar&Navigation, 2015, 9(8): 984–990. DOI: 10.1049/iet-rsn.2014.0454 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:



- Figure 1. The process of RID image series generation
- Figure 2. The flow chart for high-resolution imaging of micro-motion targets based on trajectory matrix decomposition
- Figure 4. 3D image of the nutation target
- Figure 3.
- Figure 5. Variation of the RMSE with SNR