
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Lu Xinfei, Xia Jie, Yin Zhiping, et al.. High-resolution radar imaging using 2D deconvolution with sparse echo denoising[J]. Journal of Radars, 2018, 7(3): 285–293. DOI: 10.12000/JR17108

|
High-resolution Radar Imaging Using 2D Deconvolution with Sparse Echo Denoising
DOI: 10.12000/JR17108 CSTR: 32380.14.JR17108
More Information-
Abstract
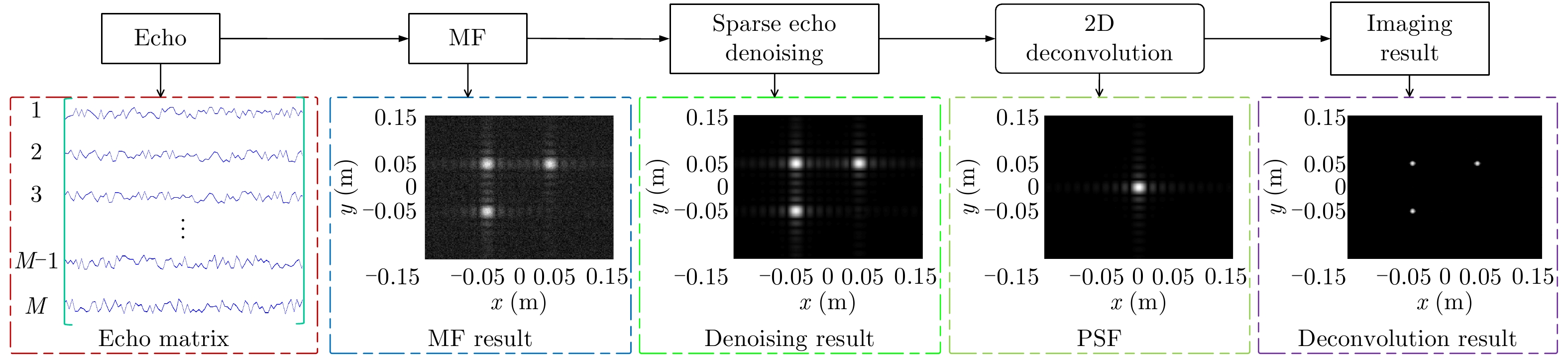
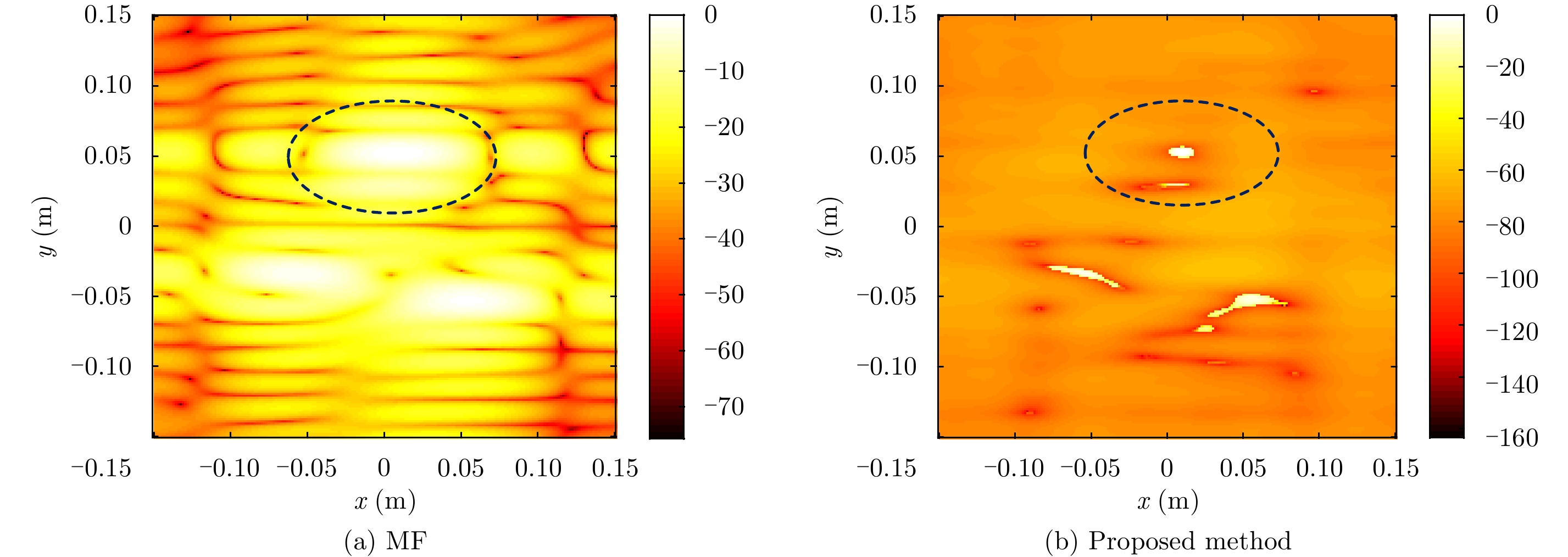
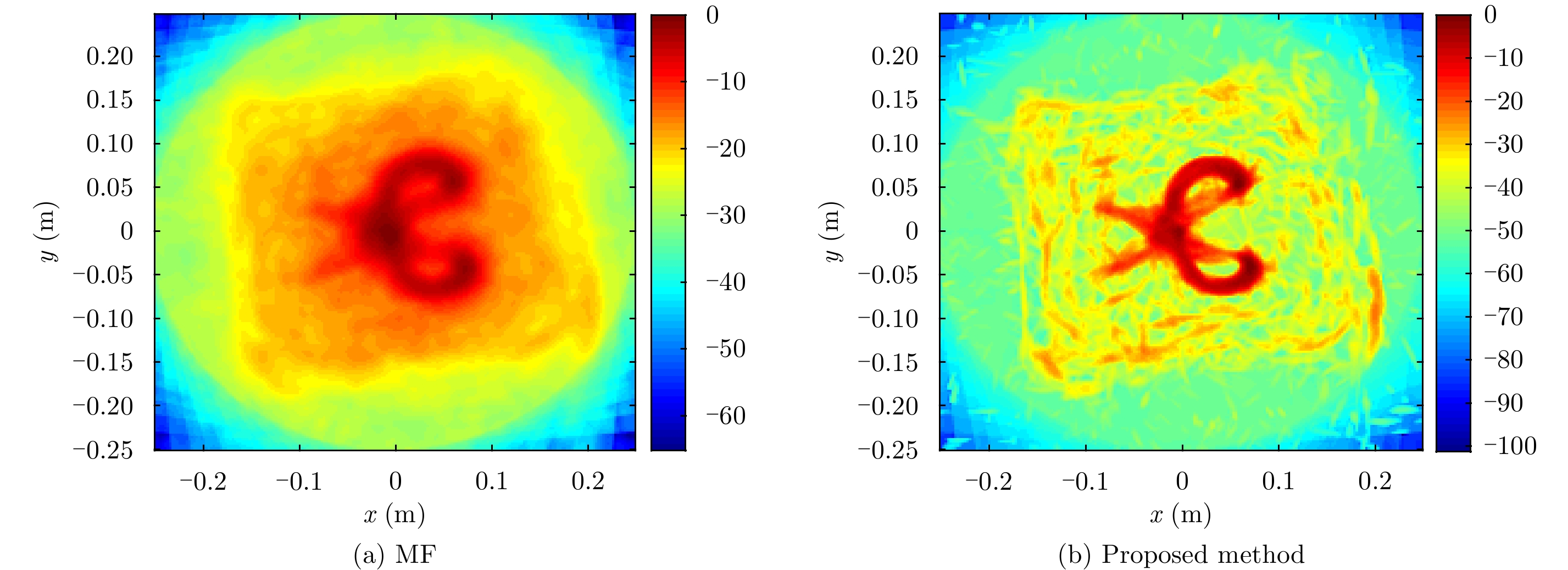
This study proposes a high-resolution radar imaging method combined with the sparse low-rank matrix recovery technique and the deconvolution algorithm based on the matched filtering result. We establish a two-Dimensional (2D) convolution model for the radar signal after the Matched Filter (MF) to maximize the Signal-to-Noise Ratio (SNR) and use the 2D deconvolution algorithm of the Wiener filter to obtain a high resolution. However, representative deconvolution algorithms are confronted with an ill-posed problem, which magnifies the noise while influencing the imaging resolution. Prior to this study, the echo matrix after the MF was proven to be sparse and low rank under the constraint of a sparsely distributed target. The target distribution is smoothed by the influence of the point spread function. Hence, inspired by these points, we further enhance the SNR of the echo matrix based on the sparse and low-rank characteristics to alleviate the ill-posed problem of deconvolution and the poor resolution of the Wiener filter. The performance of the proposed method is demonstrated by the real experimental data. -

-
References
[1] Hu K B, Zhang X L, Shi J, et al. A novel synthetic bandwidth method based on BP imaging for stepped-frequency SAR[J]. Remote Sensing Letters, 2016, 7(8): 741–750.[2] Yiğit E. Compressed sensing for millimeter-wave ground based SAR/ISAR imaging[J]. Journal of Infrared, Millimeter, and Terahertz Waves, 2014, 35(11): 932–948.[3] Zhang S S, Zhang W, Zong Z L, et al. High-resolution bistatic ISAR imaging based on two-dimensional compressed sensing[J]. IEEE Transactions on Antennas and Propagation, 2015, 63(5): 2098–2111. DOI: 10.1109/TAP.2015.2408337.[4] Kreucher C and Brennan M. A compressive sensing approach to multistatic radar change imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1107–1112. DOI: 10.1109/TGRS.2013.2247408.[5] Wang T Y, Lu X F, Yu X F, et al. A fast and accurate sparse continuous signal reconstruction by homotopy DCD with non-convex regularization[J]. Sensors, 2014, 14(4): 5929–5951. DOI: 10.3390/s140405929.[6] Ding L and Chen W D. MIMO radar sparse imaging with phase mismatch[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(4): 816–820. DOI: 10.1109/LGRS.2014.2363110.[7] Ding L, Chen W D, Zhang W Y, et al. MIMO radar imaging with imperfect carrier synchronization: A point spread function analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2236–2247. DOI: 10.1109/TAES.2015.140428.[8] Liu C C and Chen W D. Sparse self-calibration imaging via iterative MAP in FM-based distributed passive radar[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(3): 538–542. DOI: 10.1109/LGRS.2012.2212272.[9] Wang X, Zhang M, and Zhao J. Efficient cross-range scaling method via two-dimensional unitary ESPRIT scattering center extraction algorithm[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(5): 928–932. DOI: 10.1109/LGRS.2014.2367521.[10] Yang L, Zhou J X, Xiao H T, et al.. Two-dimensional radar imaging based on continuous compressed sensing[C]. Proceedings of the 5th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Singapore, 2015: 710–713. DOI: 10.1109/APSAR.2015.730630.[11] Guan J C, Yang J Y, Huang Y L, et al. Maximum a posteriori-based angular superresolution for scanning radar imaging[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(3): 2389–2398. DOI: 10.1109/TAES.2014.120555.[12] Parekh A and Selesnick I W. Enhanced low-rank matrix approximation[J]. IEEE Signal Processing Letters, 2016, 23(4): 493–497. DOI: 10.1109/LSP.2016.2535227.[13] Lin Z C, Chen M M, and Ma Y. The augmented lagrange multiplier method for exact recovery of corrupted low-rank matrices[R]. arXiv preprint arXiv:1009.5055, 2010. DOI: 10.1016/j.jsb.2012.10.010.[14] Pedone M, Bayro-Corrochano E, Flusser J, et al. Quaternion wiener deconvolution for noise robust color image registration[J]. IEEE Signal Processing Letters, 2015, 22(9): 1278–1282. DOI: 10.1109/LSP.2015.2398033.[15] Zhu J, Zhu S Q, and Liao G S. High-resolution radar imaging of space debris based on sparse representation[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(10): 2090–2094. DOI: 10.1109/LGRS.2015.2449861.[16] Horn R A and Johnson C R. Matrix Analysis[M]. Cambridge: Cambridge University Press, 1990.[17] Donoho D L. De-noising by soft-thresholding[J]. IEEE Transactions on Information Theory, 1995, 41(3): 613–627. DOI: 10.1109/18.382009. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

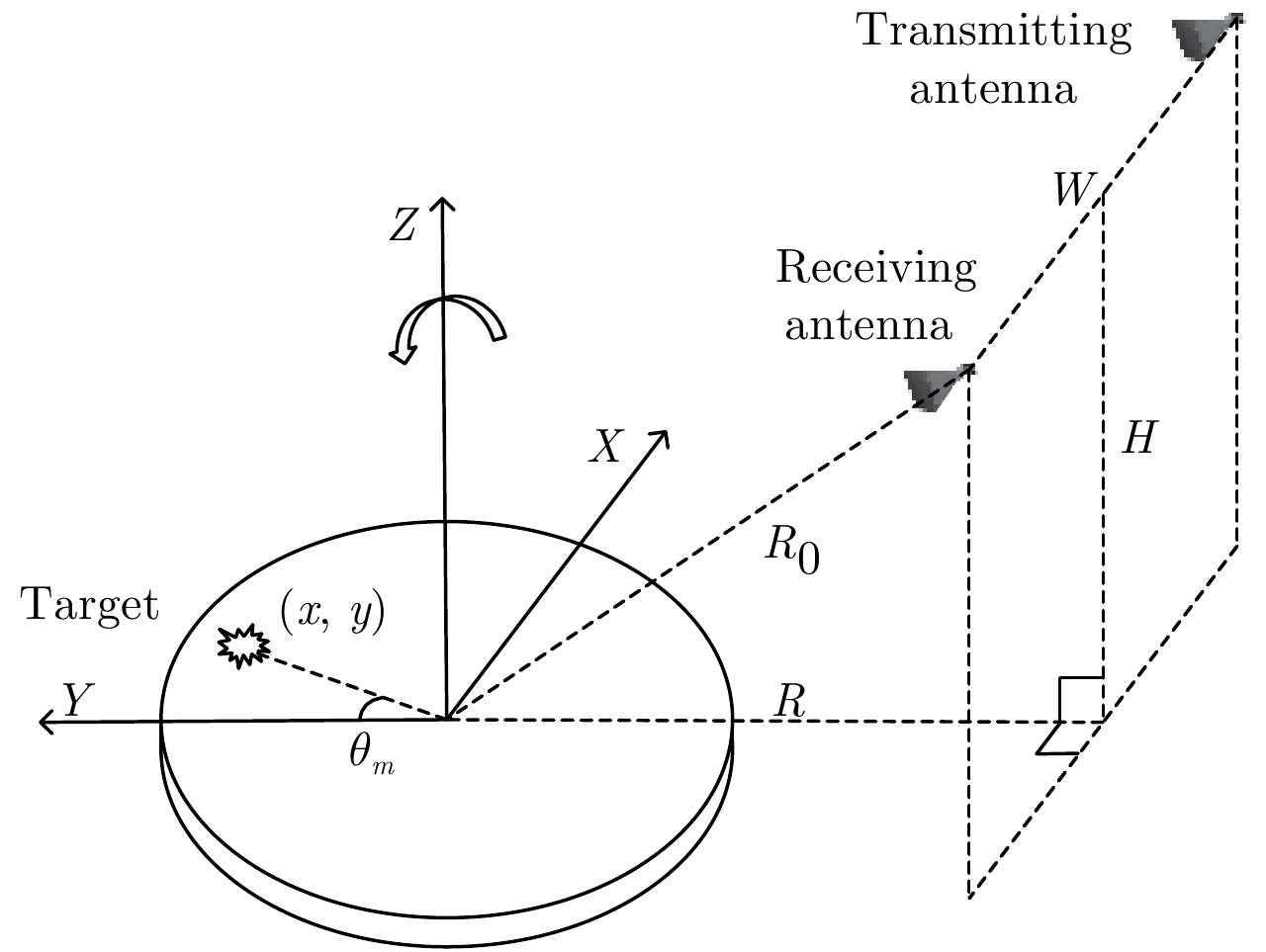
- Figure 1. Radar imaging geometry
- Figure 2. The flowchart of the proposed method
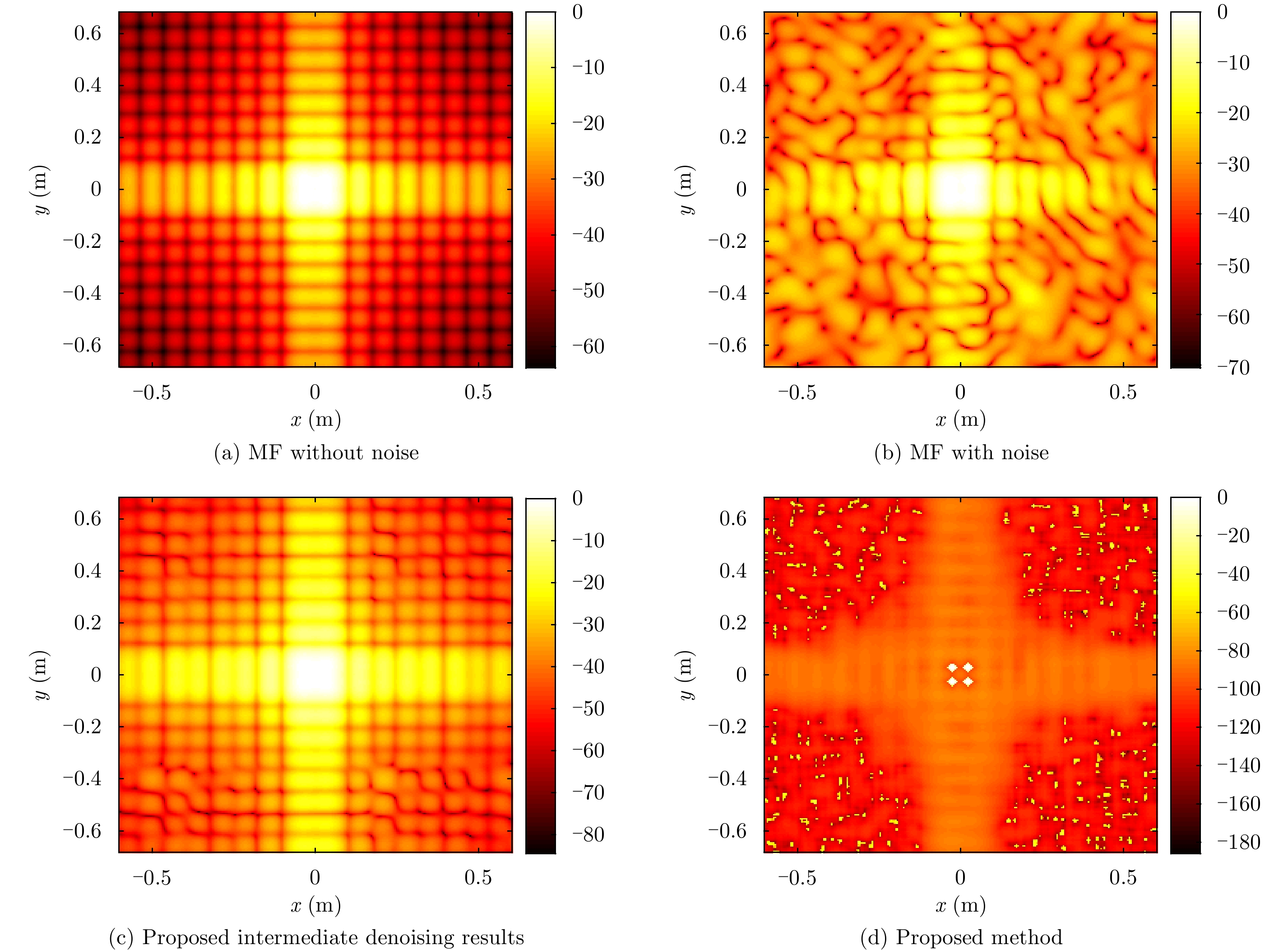
- Figure 3. Imaging results
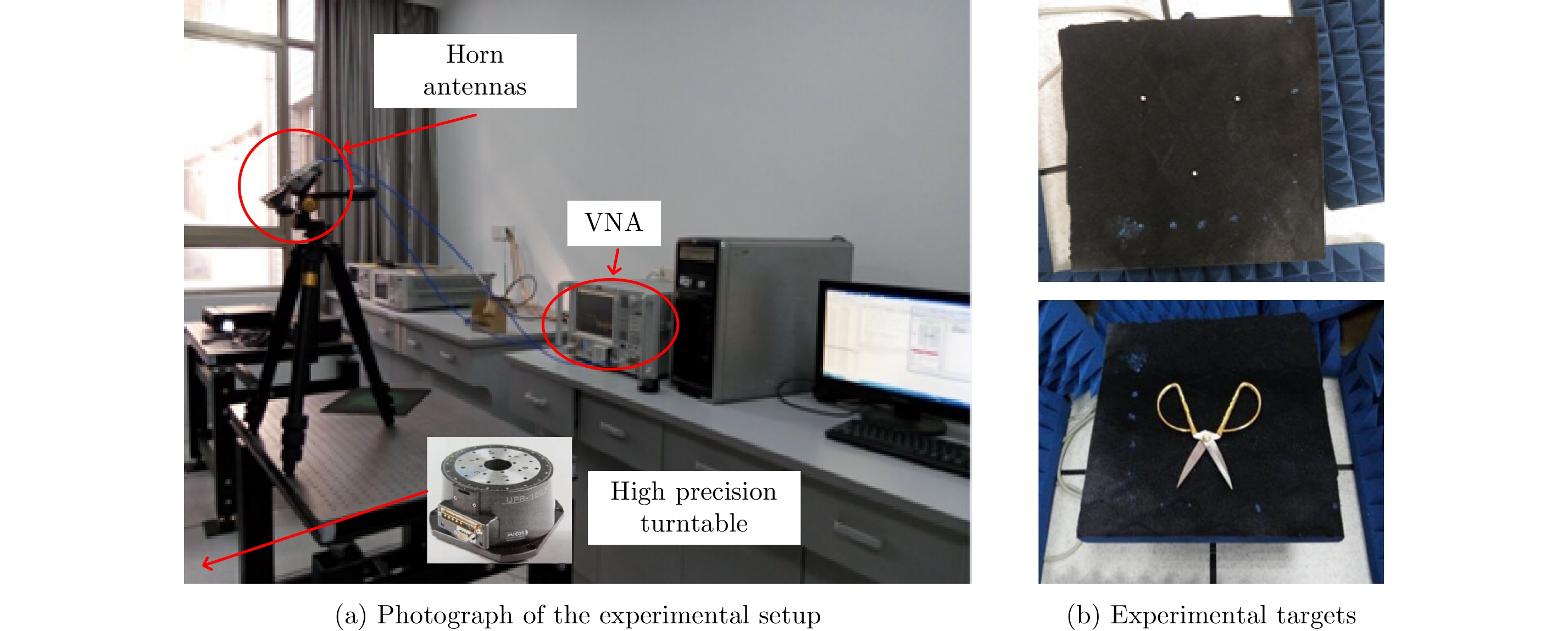
- Figure 4. Experimental scene VNA
- Figure 5. Imaging results of mental spheres
- Figure 6. One-dimensional cut through the target with red dashed circle in Fig. 5
- Figure 7. Imaging results of scissors