
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | WANG Binglu, JIN Yang, ZHANG Lei, et al. Collaborative perception method based on multisensor fusion[J]. Journal of Radars, 2024, 13(1): 87–96. doi: 10.12000/JR23184

|
Collaborative Perception Method Based on Multisensor Fusion(in English)
DOI: 10.12000/JR23184
More Information-
Abstract
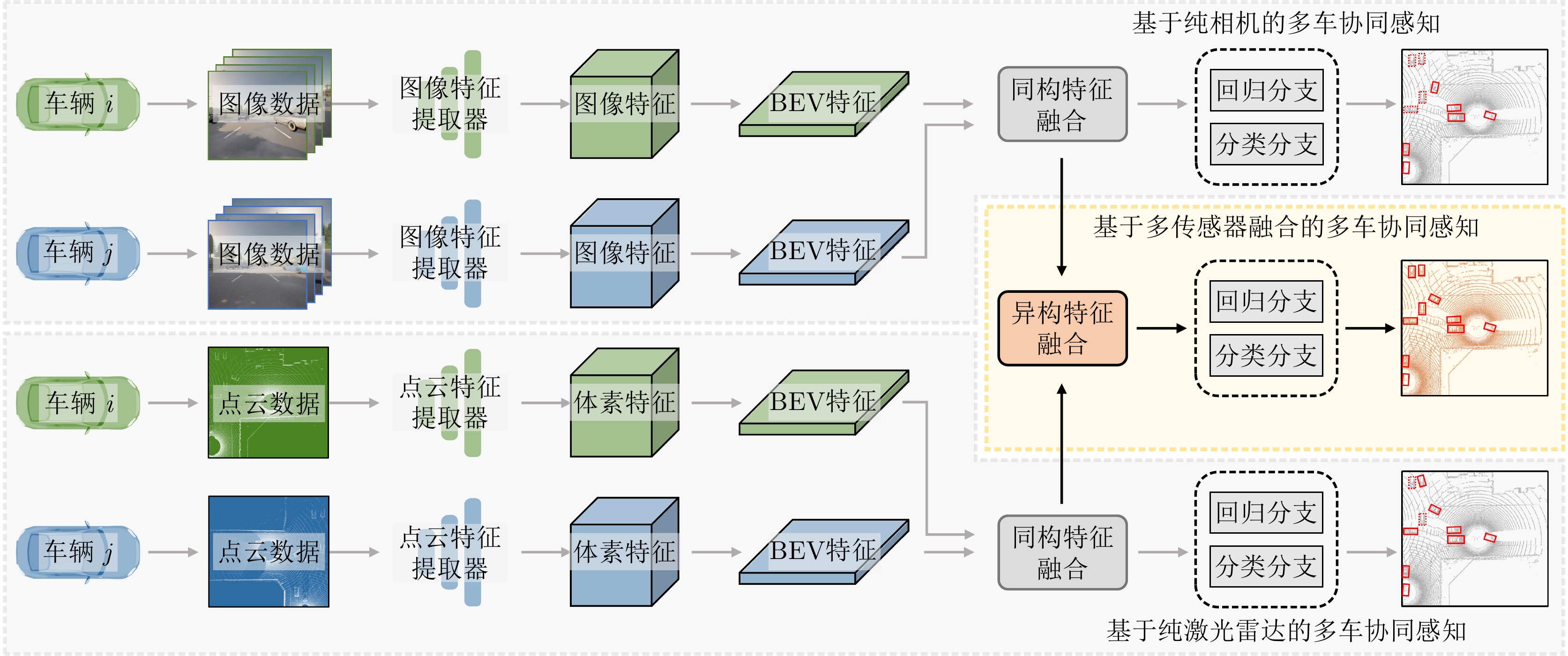
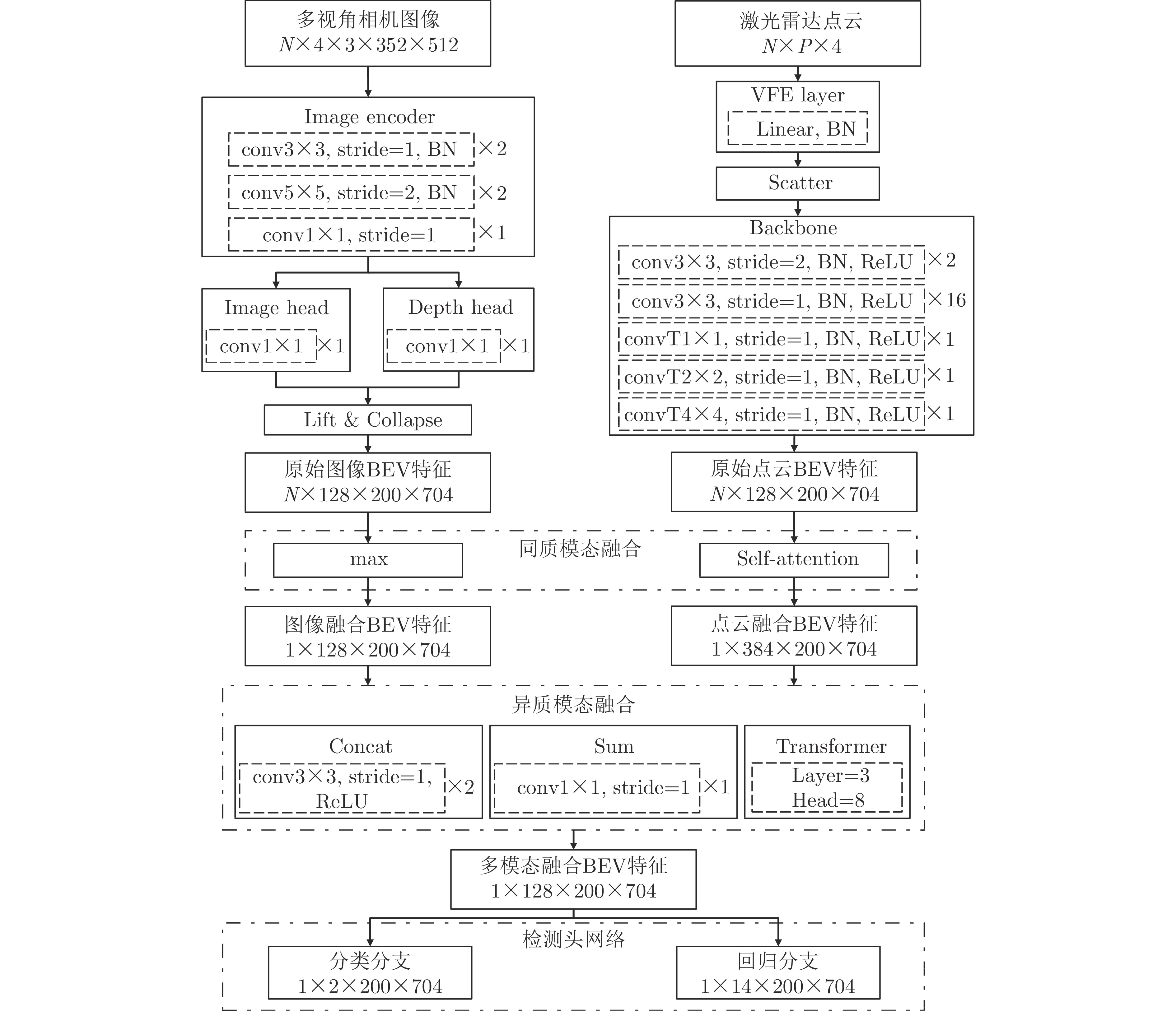
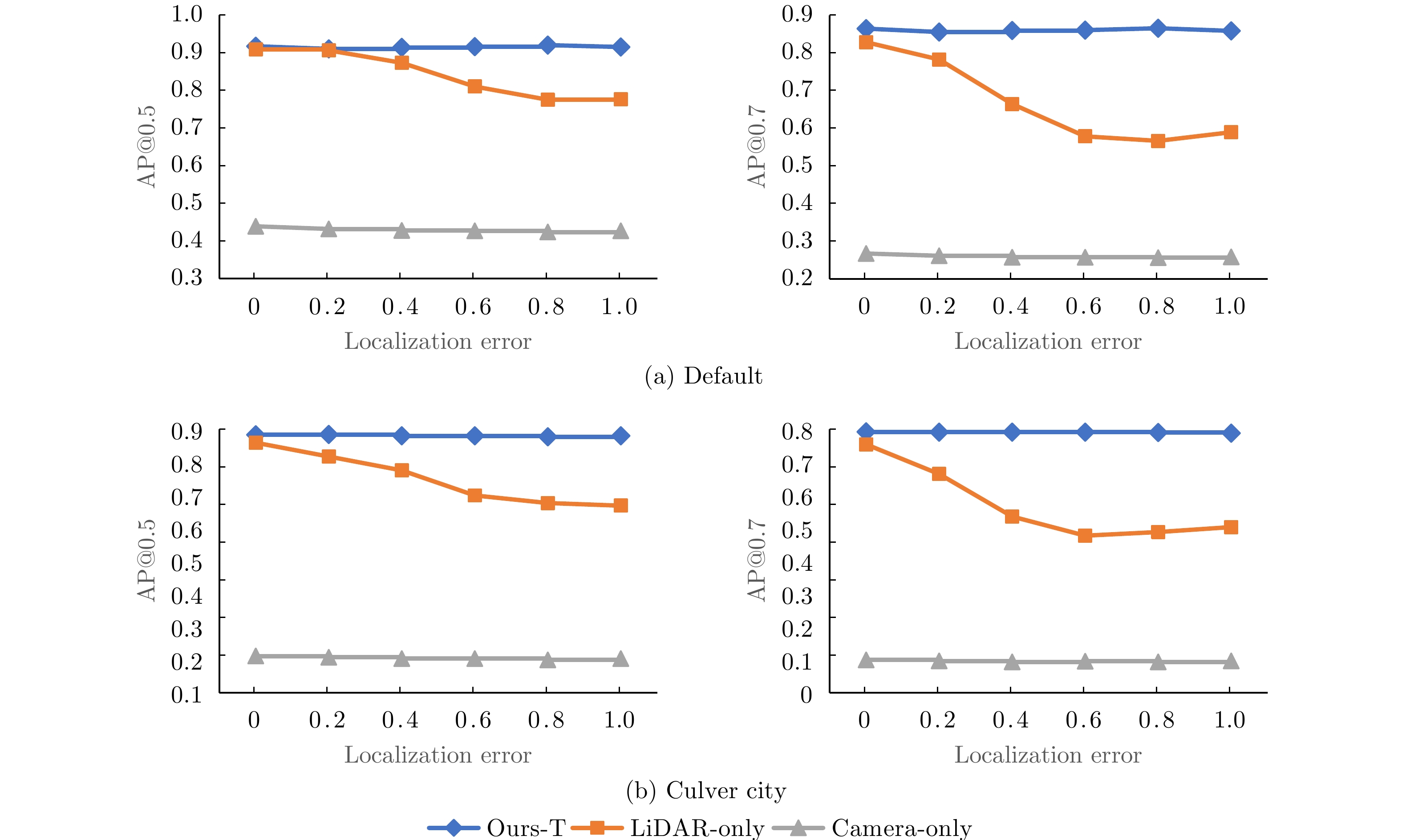
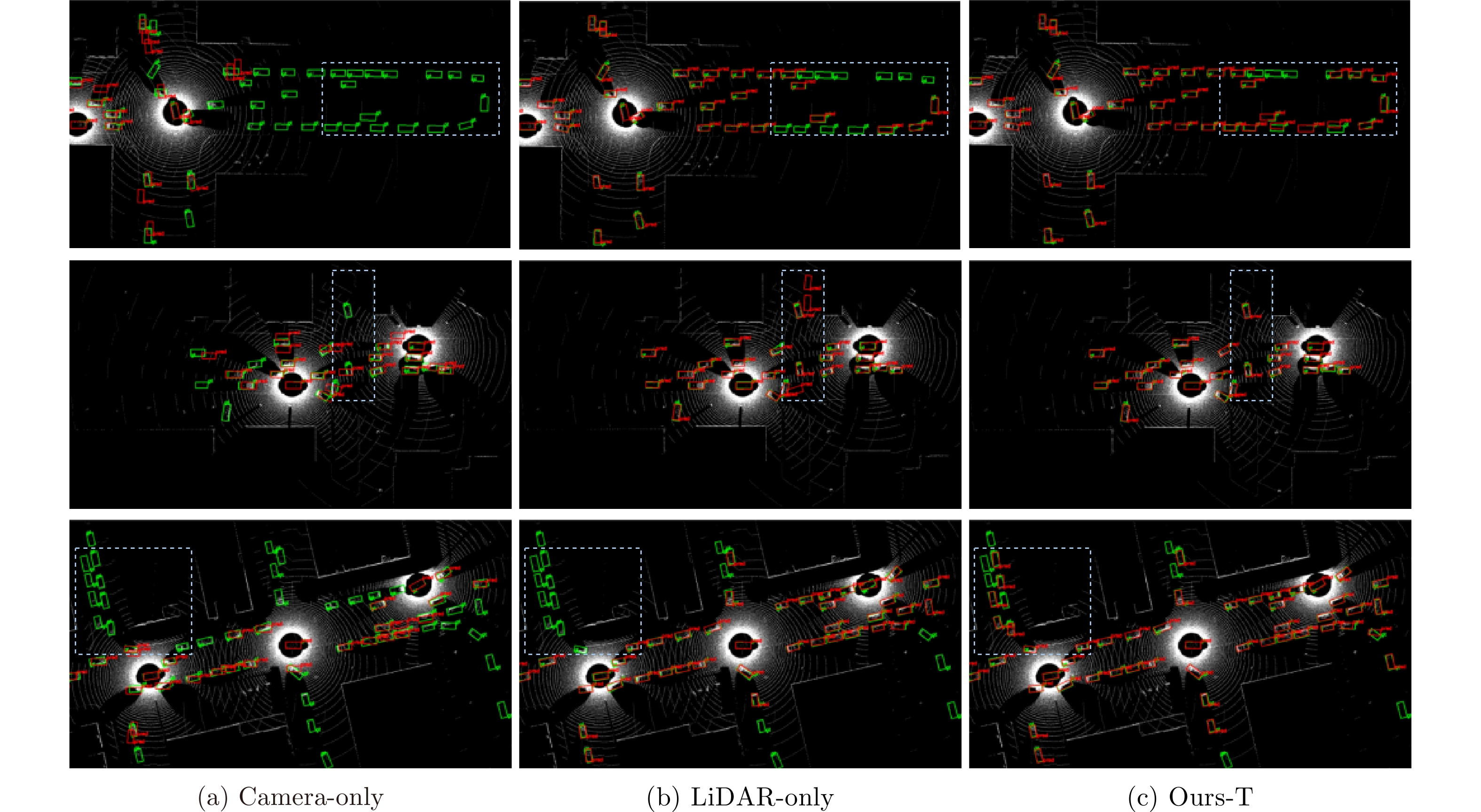
This paper proposes a novel multimodal collaborative perception framework to enhance the situational awareness of autonomous vehicles. First, a multimodal fusion baseline system is built that effectively integrates Light Detection and Ranging (LiDAR) point clouds and camera images. This system provides a comparable benchmark for subsequent research. Second, various well-known feature fusion strategies are investigated in the context of collaborative scenarios, including channel-wise concatenation, element-wise summation, and transformer-based methods. This study aims to seamlessly integrate intermediate representations from different sensor modalities, facilitating an exhaustive assessment of their effects on model performance. Extensive experiments were conducted on a large-scale open-source simulation dataset, i.e., OPV2V. The results showed that attention-based multimodal fusion outperforms alternative solutions, delivering more precise target localization during complex traffic scenarios, thereby enhancing the safety and reliability of autonomous driving systems. -

-
References
[1] LIU Si, GAO Chen, CHEN Yuan, et al. Towards vehicle-to-everything autonomous driving: A survey on collaborative perception[EB/OL]. https://arxiv:abs/2308.16714, 2023.[2] HAN Yushan, ZHANG Hui, LI Huifang, et al. Collaborative perception in autonomous driving: Methods, datasets, and challenges[J]. IEEE Intelligent Transportation Systems Magazine, 2023, 15(6): 131–151. doi: 10.1109/MITS.2023.3298534.[3] REN Shunli, CHEN Siheng, and ZHANG Wenjun. Collaborative perception for autonomous driving: Current status and future trend[C]. 2021 5th Chinese Conference on Swarm Intelligence and Cooperative Control, Singapore, Singapore, 2023: 682–692. doi: 10.1007/978-981-19-3998-3_65.[4] 上官伟, 李鑫, 柴琳果, 等. 车路协同环境下混合交通群体智能仿真与测试研究综述[J]. 交通运输工程学报, 2022, 22(3): 19–40. doi: 10.19818/j.cnki.1671-1637.2022.03.002.SHANGGUAN Wei, LI Xin, CHAI Linguo, et al. Research review on simulation and test of mixed traffic swarm in vehicle-infrastructure cooperative environment[J]. Journal of Traffic and Transportation Engineering, 2022, 22(3): 19–40. doi: 10.19818/j.cnki.1671-1637.2022.03.002.[5] CHEN Qi, TANG Sihai, YANG Qing, et al. Cooper: Cooperative perception for connected autonomous vehicles based on 3D point clouds[C]. 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, USA, 2019: 514–524. doi: 10.1109/ICDCS.2019.00058.[6] CHEN Qi, MA Xu, TANG Sihai, et al. F-cooper: Feature based cooperative perception for autonomous vehicle edge computing system using 3D point clouds[C]. 4th ACM/IEEE Symposium on Edge Computing, Arlington, USA, 2019: 88–100. doi: 10.1145/3318216.3363300.[7] WANG T H, MANIVASAGAM S, LIANG Ming, et al. V2VNet: Vehicle-to-vehicle communication for joint perception and prediction[C]. 16th European Conference on Computer Vision, Glasgow, UK, 2020: 605–621. doi: 10.1007/978-3-030-58536-5_36.[8] XU Runsheng, XIANG Hao, XIA Xin, et al. OPV2V: An open benchmark dataset and fusion pipeline for perception with vehicle-to-vehicle communication[C]. 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, USA, 2022: 2583–2589. doi: 10.1109/ICRA46639.2022.9812038.[9] XU Runsheng, XIANG Hao, TU Zhengzhong, et al. V2x-ViT: Vehicle-to-everything cooperative perception with vision transformer[C]. 17th European Conference on Computer Vision, Tel Aviv, Israel, 2022: 107–124. doi: 10.1007/978-3-031-19842-7_7.[10] LI Yiming, REN Shunli, WU Pengxiang, et al. Learning distilled collaboration graph for multi-agent perception[C]. 34th International Conference on Neural Information Processing Systems, Virtual Online, 2021: 29541–29552.[11] LI Yiming, ZHANG Juexiao, MA Dekun, et al. Multi-robot scene completion: Towards task-agnostic collaborative perception[C]. 6th Conference on Robot Learning, Auckland, New Zealand, 2023: 2062–2072.[12] QIAO Donghao and ZULKERNINE F. Adaptive feature fusion for cooperative perception using LiDAR point clouds[C]. 2023 IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, USA, 2023: 1186–1195. doi: 10.1109/WACV56688.2023.00124.[13] ZHANG Zijian, WANG Shuai, HONG Yuncong, et al. Distributed dynamic map fusion via federated learning for intelligent networked vehicles[C]. 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021: 953–959. doi: 10.1109/ICRA48506.2021.9561612.[14] WANG Binglu, ZHANG Lei, WANG Zhaozhong, et al. CORE: Cooperative reconstruction for multi-agent perception[C]. IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 8710–8720.[15] XU Runsheng, TU Zhengzhong, XIANG Hao, et al. CoBEVT: Cooperative bird’s eye view semantic segmentation with sparse transformers[C]. 6th Conference on Robot Learning, Auckland, New Zealand, 2022: 989–1000.[16] HU Yue, LU Yifan, XU Runsheng, et al. Collaboration helps camera overtake LiDAR in 3D detection[C]. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 9243–9252. doi: 10.1109/CVPR52729.2023.00892.[17] 党相卫, 秦斐, 卜祥玺, 等. 一种面向智能驾驶的毫米波雷达与激光雷达融合的鲁棒感知算法[J]. 雷达学报, 2021, 10(4): 622–631. doi: 10.12000/JR21036.DANG Xiangwei, QIN Fei, BU Xiangxi, et al. A robust perception algorithm based on a radar and LiDAR for intelligent driving[J]. Journal of Radars, 2021, 10(4): 622–631. doi: 10.12000/JR21036.[18] CHEN Xiaozhi, MA Huimin, WAN Ji, et al. Multi-view 3D object detection network for autonomous driving[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6526–6534. doi: 10.1109/CVPR.2017.691.[19] VORA S, LANG A H, HELOU B, et al. PointPainting: Sequential fusion for 3d object detection[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 4603–4611. doi: 10.1109/CVPR42600.2020.00466.[20] LIANG Tingting, XIE Hongwei, YU Kaicheng, et al. BEVFusion: A simple and robust LiDAR-camera fusion framework[C]. 36th International Conference on Neural Information Processing Systems, New Orleans, USA, 2022: 10421–10434.[21] LIU Zhijian, TANG Haotian, AMINI A, et al. BEVFusion: Multi-task multi-sensor fusion with unified bird’s-eye view representation[C]. 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 2023: 2774–2781. doi: 10.1109/ICRA48891.2023.10160968.[22] JIAO Yang, JIE Zequn, CHEN Shaoxiang, et al. MSMDFusion: Fusing LiDAR and camera at multiple scales with multi-depth seeds for 3D object detection[C]. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 21643–21652. doi: 10.1109/CVPR52729.2023.02073.[23] PRAKASH A, CHITTA K, and GEIGER A. Multi-modal fusion transformer for end-to-end autonomous driving[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 7073–7083. doi: 10.1109/CVPR46437.2021.00700.[24] XIANG Hao, XU Runsheng, and MA Jiaqi. HM-ViT: Hetero-modal vehicle-to-vehicle cooperative perception with vision transformer[EB/OL]. https://arxiv: abs/2304.10628, 2023.[25] READING C, HARAKEH A, CHAE J, et al. Categorical depth distribution network for monocular 3D object detection[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 8551–8560. doi: 10.1109/CVPR46437.2021.00845.[26] LANG A H, VORA S, CAESAR H, et al. PointPillars: Fast encoders for object detection from point clouds[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 12689–12697. doi: 10.1109/CVPR.2019.01298.[27] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 6000–6010.[28] 郭帅, 陈婷, 王鹏辉, 等. 基于角度引导Transformer融合网络的多站协同目标识别方法[J]. 雷达学报, 2023, 12(3): 516–528. doi: 10.12000/JR23014.GUO Shuai, CHEN Ting, WANG Penghui, et al. Multistation cooperative radar target recognition based on an angle-guided transformer fusion network[J]. Journal of Radars, 2023, 12(3): 516–528. doi: 10.12000/JR23014.[29] XU Runsheng, GUO Yi, HAN Xu, et al. OpenCDA: An open cooperative driving automation framework integrated with co-simulation[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, USA, 2021: 1155–1162. doi: 10.1109/ITSC48978.2021.9564825.[30] DOSOVITSKIY A, ROS G, CODEVILLA F, et al. CARLA: An open urban driving simulator[C]. 1st Annual Conference on robot learning, Mountain View, USA, 2017: 1–16. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:
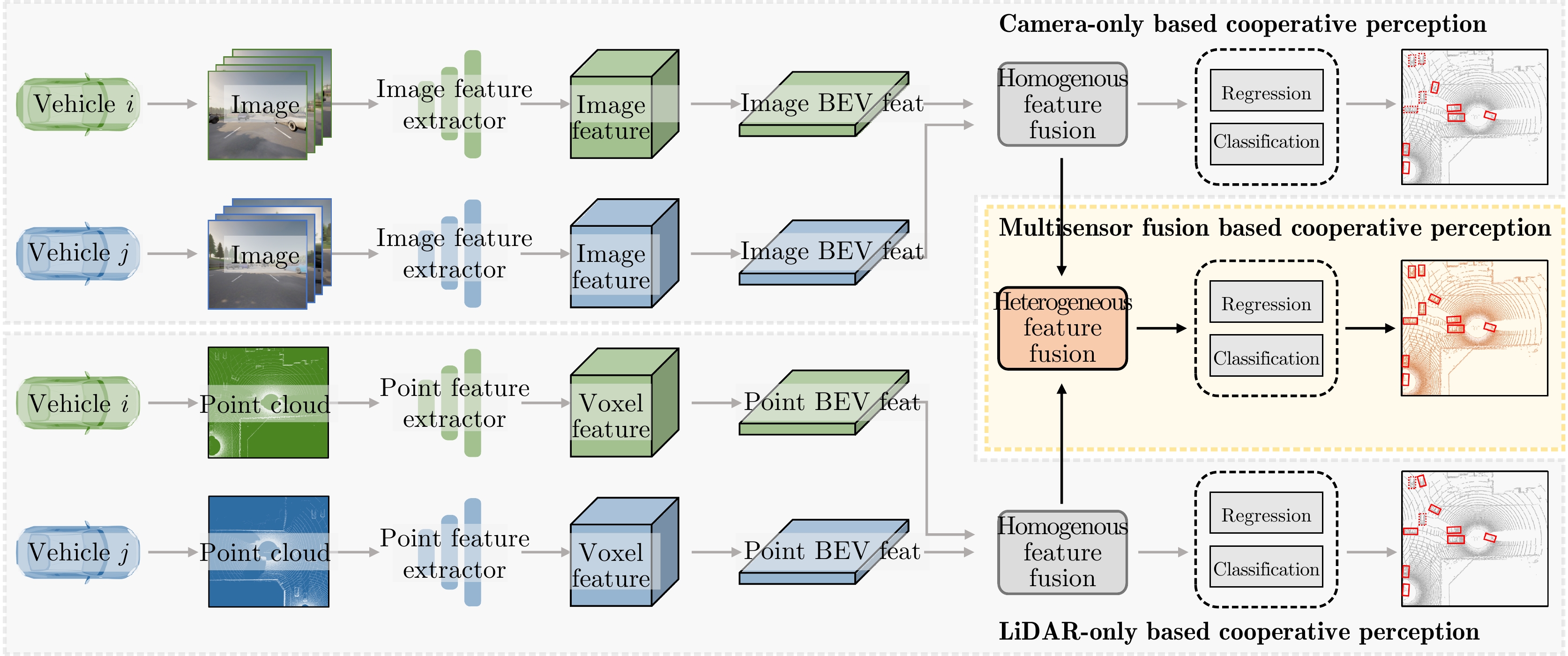
- Figure 1. Multisensor fusion collaborative perception framework
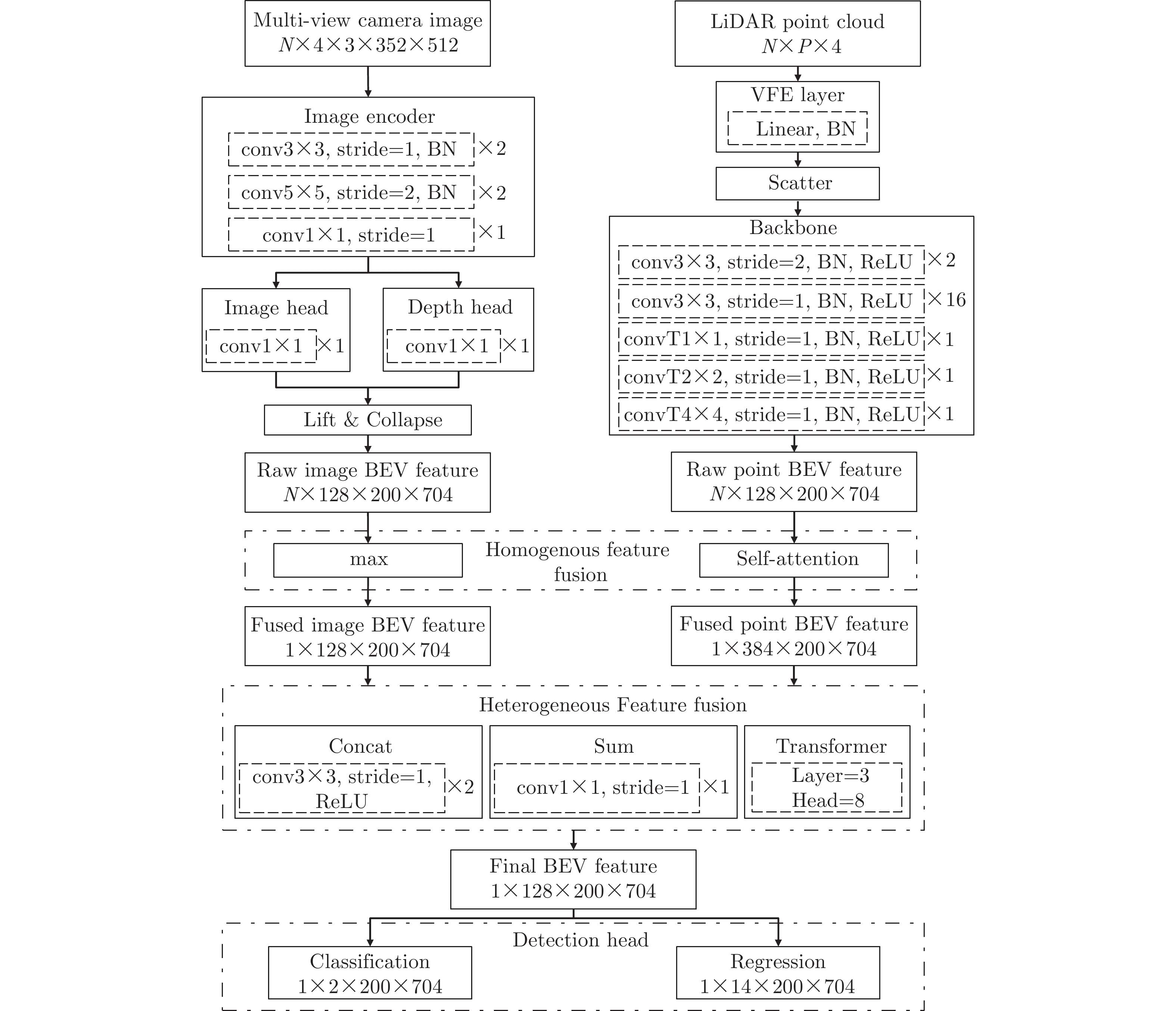
- Figure 2. Detailed model architecture and parameter specifics
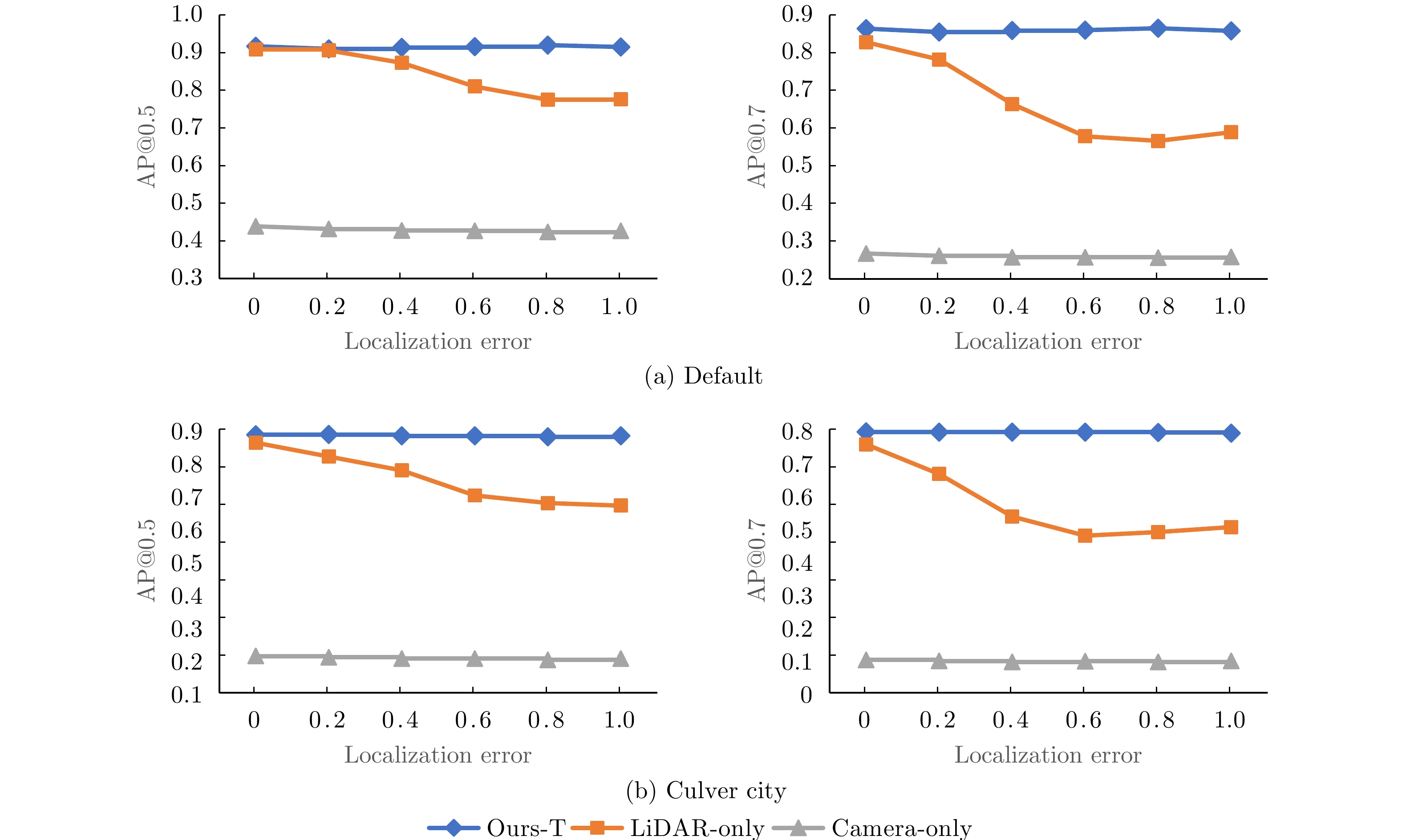
- Figure 3. Impact of positioning error on model performance
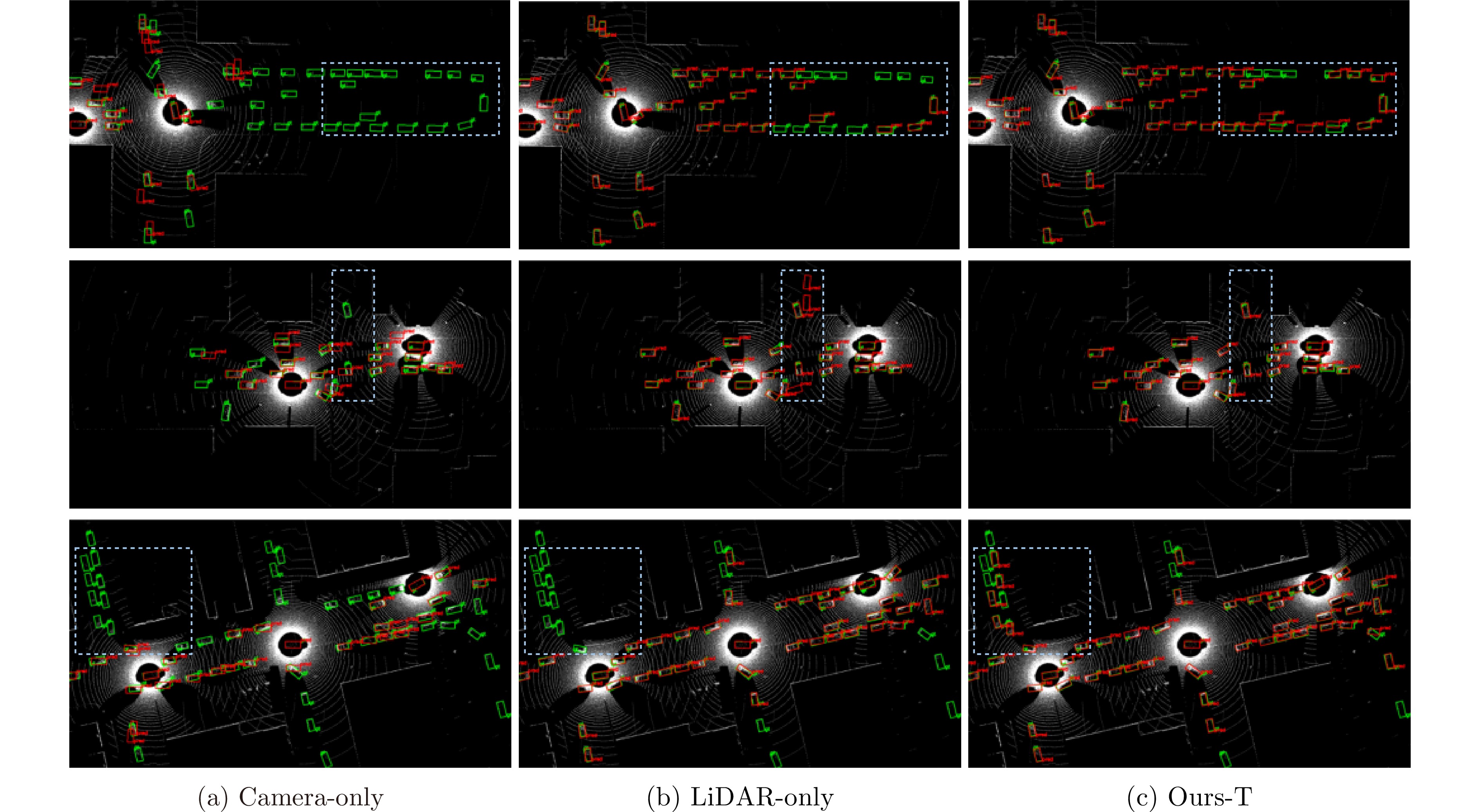
- Figure 4. Visualization comparison of detection results from different models
- Figure 1.
- Figure 2.
- Figure 3.
- Figure 4.