WU Guizhou, GUO Fucheng, and ZHANG Min. Direct position determination: An overview[J]. Journal of Radars, 2020, 9(6): 998–1013. doi: 10.12000/JR20040
Citation:
CHAI Jiahui, LI Minglei, LI Min, et al. ResCalib: Joint LiDAR and camera calibration based on geometrically supervised deep neural networks[J]. Journal of Radars, in press. doi: 10.12000/JR24233
WU Guizhou, GUO Fucheng, and ZHANG Min. Direct position determination: An overview[J]. Journal of Radars, 2020, 9(6): 998–1013. doi: 10.12000/JR20040
Citation:
CHAI Jiahui, LI Minglei, LI Min, et al. ResCalib: Joint LiDAR and camera calibration based on geometrically supervised deep neural networks[J]. Journal of Radars, in press. doi: 10.12000/JR24233
College of Electronic and Information Engineering, Nanjing University of Aeronautics & Astronautics, Nanjing 211106, China
2.
Key Laboratory of Radar Imaging and Microwave Photonics, Ministry of Education, Nanjing 211106, China
3.
China Institute of Aeronautical Radio Electronics, Shanghai 200233, China
Funds:
The National Natural Science Foundation of China (42271343), Open Project Funds for the Joint Laboratory of Spatial Intelligent Perception and Large Model Application
Light Detection And Ranging (LiDAR) systems lack texture and color information, while cameras lack depth information. Thus, the information obtained from LiDAR and cameras is highly complementary. Therefore, combining these two types of sensors can obtain rich observation data and improve the accuracy and stability of environmental perception. The accurate joint calibration of the external parameters of these two types of sensors is the premise of data fusion. At present, most joint calibration methods need to be processed through target calibration and manual point selection. This makes it impossible to use them in dynamic application scenarios. This paper presents a ResCalib deep neural network model, which can be used to solve the problem of the online joint calibration of LiDAR and a camera. The method uses LiDAR point clouds, monocular images, and in-camera parameter matrices as the input to achieve the external parameters solving of LiDAR and cameras; however, the method has low dependence on external features or targets. ResCalib is a geometrically supervised deep neural network that automatically estimates the six-degree-of-freedom external parameter relationship between LiDAR and cameras by implementing supervised learning to maximize the geometric and photometric consistencies of input images and point clouds. Experiments show that the proposed method can correct errors in calibrating rotation by ±10° and translation by ±0.2 m. The average absolute errors of the rotation and translation components of the calibration solution are 0.35° and 0.032 m, respectively, and the time required for single-group calibration is 0.018 s, which provides technical support for realizing automatic joint calibration in a dynamic environment.
根据估计辐射源位置的步骤,可以将无源定位技术分为两类,即传统两步法与一步法。传统两步法定位的基本思路[1]为:第1步,通过接收机截获辐射源信号,对原始采样信号进行处理,使用空间谱等方法[2-4]估计蕴含辐射源位置信息的定位参数;第2步,利用定位参数与辐射源位置之间的关系建立并求解方程,实现定位。第1步中估计的定位参数多种多样,例如由于信号到达干涉仪不同天线波程差导致的相位差[5-7],或者由于信号到达不同观测站传播路径的差异导致的时间差(Time Difference Of Arrival, TDOA)[8-11],或者由于目标和观测站之间相对速度差异导致的信号到达不同观测站的频差(Frequency Different Of Arrival, FDOA)[12,13],以及多普勒变化率(Doppler rate)[14-17]、或者信号到达角方向(Direction Of Arrival, DOA)[18-20]、接收信号强度(Received Signal Strength, RSS)[21-25]等。实际上以上定位参数在空间中对应的是定位线或者定位面(曲面)[26],例如TDOA对应的是双曲线或双曲面、DOA对应的是直线或平面、FDOA对应的是等频差曲面等。传统两步定位法在第2步中利用这些定位线或定位面相交,通过穷尽搜索法[27,28]、最小二乘法[29]、伪线性法[30]、泰勒展开和梯度结合法[31]等方法,估计辐射源的位置。
另一种无源定位方法为一步定位法。相对于传统两步定位法,一步定位法不需要估计定位参数的过程,而是直接对原始采样信号进行处理,利用信号中蕴含的辐射源位置信息,构建仅与辐射源位置相关的目标函数(代价函数),通过穷尽搜索等优化算法实现定位[32-37],由于其实现的是从信号到辐射源位置的直接估计,因此一般被称为直接定位法(Direct Position Determination, DPD)。DPD的基本思路最早可以追溯到Wax和Kailath[38]在1985年提出的分散式处理方法,随后在2004年由以色列学者Weiss[33]正式提出。
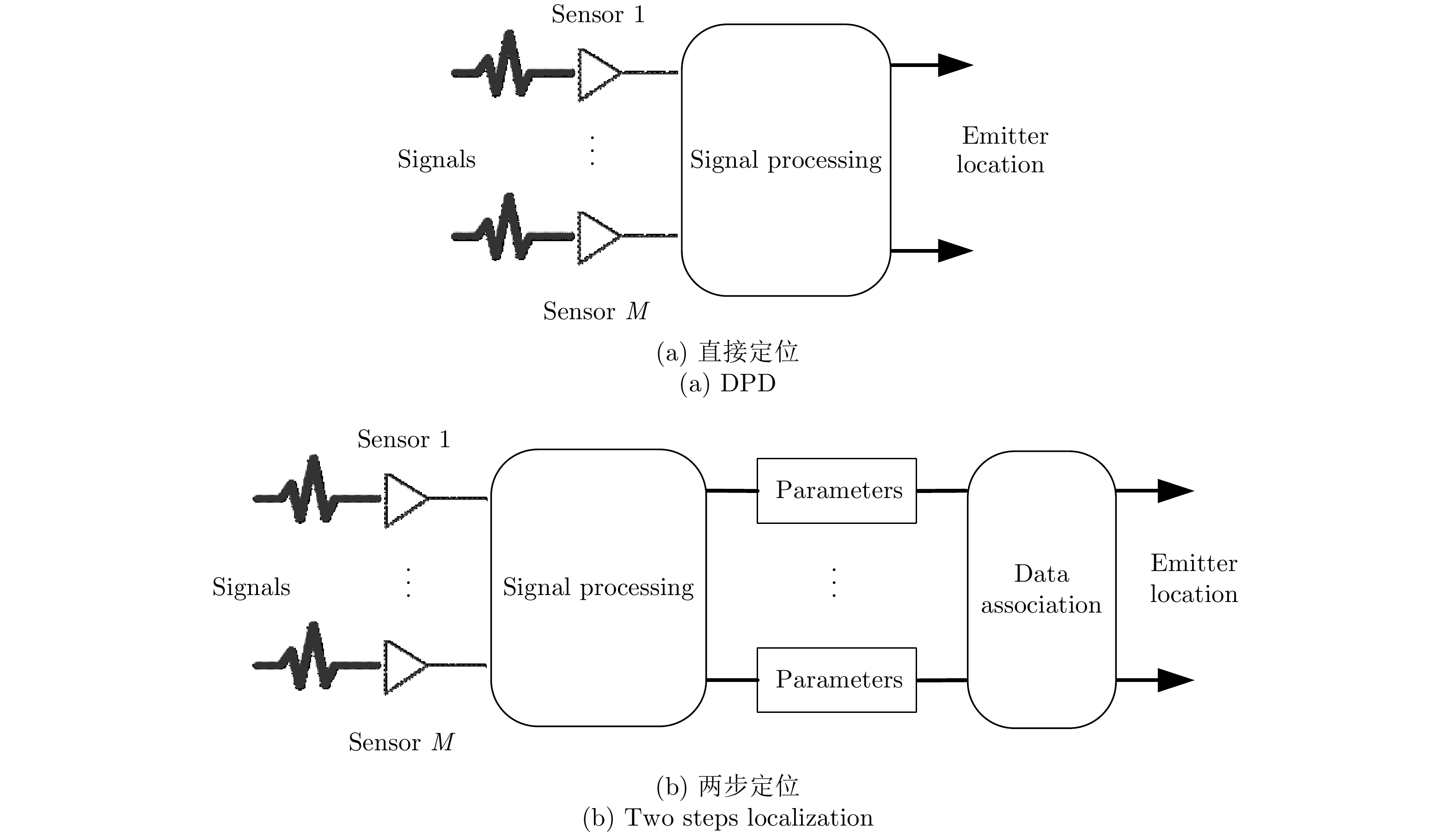
另外相干(coherent)信号在阵列信号处理中受到了学者们的广泛研究[64-69],对于直接定位来说,如果依然使用多重信号分类(MUltiple SIgnal Classification, MUSIC) 的方法构建代价函数,直接定位性能将会严重衰减甚至失效。为此,文献[70]提出了基于解相干MUSIC的直接定位算法,通过接收信号协方差矩阵共轭重构,实现了相干信号的直接定位;文献[71]提出使用自适应迭代的方式避免协方差矩阵秩亏,也可以实现相干信号的直接定位。除此之外,空间平滑等在相干信号阵列测向中已经验证有效的方法[72-74],也可以推广到直接定位之中,相应方法的优势和不足在直接定位之中也待分析讨论。
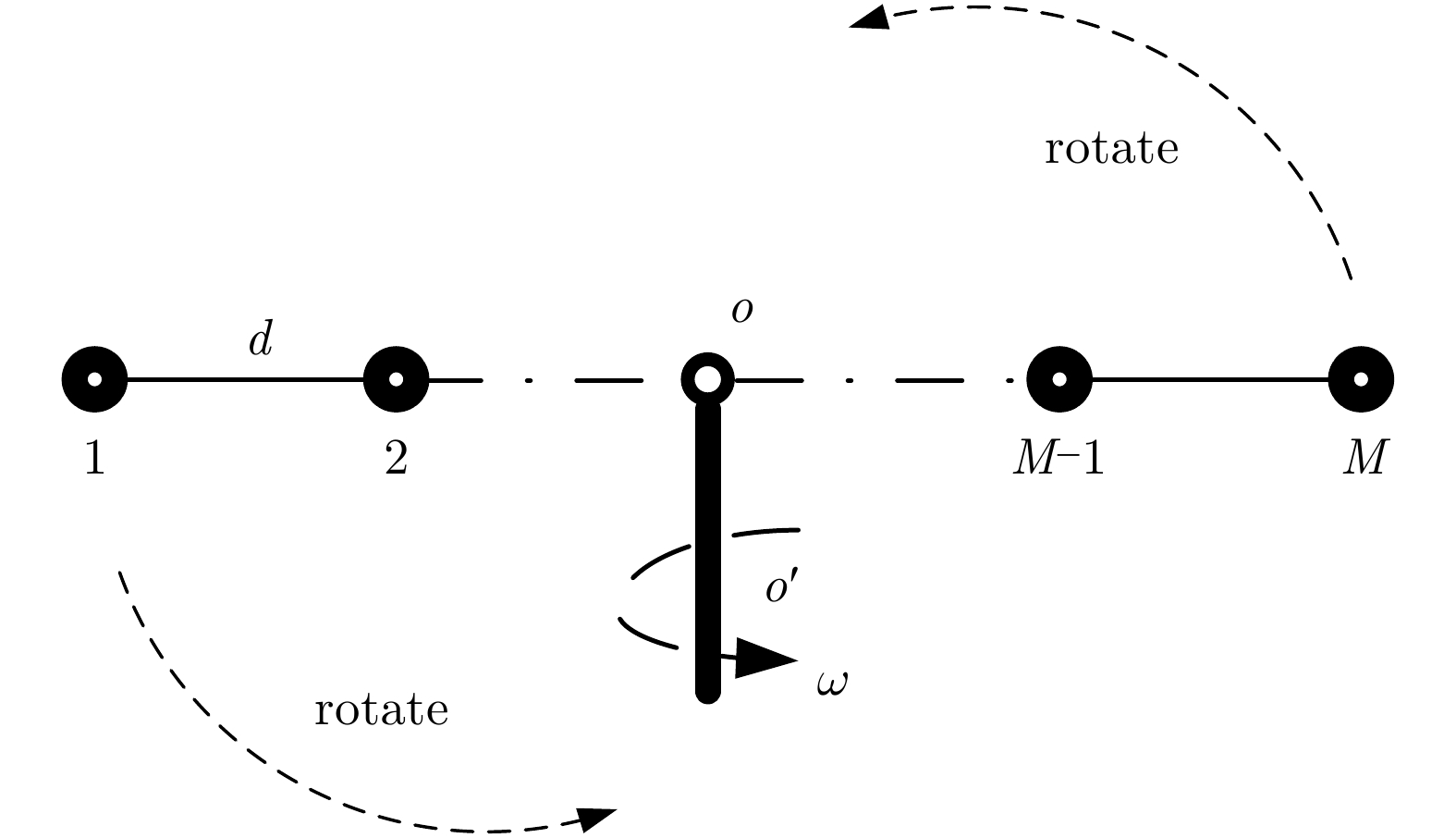
改进阵列构型除了在增加自由度方面的效果,对于提升定位的精度和分辨率又会带来增益。最近,本文作者提出了一种基于旋转线阵(Rotating Linear Array, RLA)的运动直接定位方法[88]。通过转台等时变机构牵引阵列旋转,实现各阵元相对参考阵元的时变,其结构示意图如图4所示,其中
ω为旋转角速度,
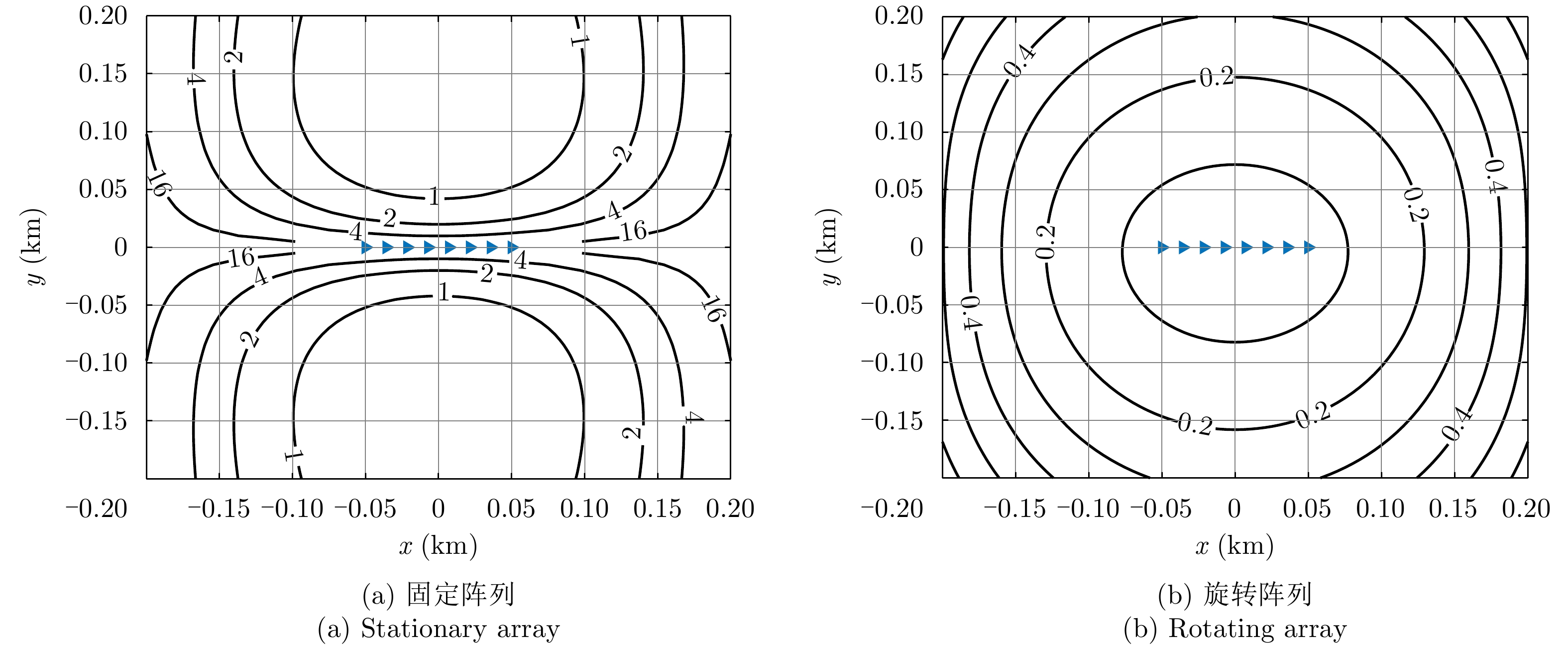
d为阵元间隔。经过理论性能分析和计算机仿真验证可知,采用旋转均匀线阵截获信号,并构建相适应的直接定位代价函数,可以显著提升直接定位的定位精度和分辨率,并且可以消除固定均匀线阵的定位模糊区域,增加系统的可观测性。以CRLB计算的使用单个均匀线阵和旋转均匀线阵直接定位的几何精度因子(Geometrical Dilution Of Precision, GDOP)如图5所示。
图
4
旋转线阵结构示意图
Figure
4.
The diagrammatic drawing of rotating array
AZIMIRAD E, HADDADNIA J, and IZADIPOUR A. A comprehensive review of the multi-sensor data fusion architectures[J]. Journal of Theoretical and Applied Information Technology, 2015, 71(1): 33–42.
WANG Shiqiang, MENG Zhaozong, GAO Nan, et al. Advancements in fusion calibration technology of lidar and camera[J]. Infrared and Laser Engineering, 2023, 52(8): 20230427. doi: 10.3788/IRLA20230427.
XIONG Chao, WU Meng, LIU Zongyi, et al. Review of joint calibration of LiDAR and camera[J]. Journal of Navigation and Positioning, 2024, 12(2): 155–166. doi: 10.16547/j.cnki.10-1096.20240218.
[4]
PANDEY G, MCBRIDE J, SAVARESE S, et al. Extrinsic calibration of a 3D laser scanner and an omnidirectional camera[J]. IFAC Proceedings Volumes, 2010, 43(16): 336–341. doi: 10.3182/20100906-3-IT-2019.00059.
[5]
WANG Weimin, SAKURADA K, and KAWAGUCHI N. Reflectance intensity assisted automatic and accurate extrinsic calibration of 3D LiDAR and panoramic camera using a printed chessboard[J]. Remote Sensing, 2017, 9(8): 851. doi: 10.3390/rs9080851.
[6]
GONG Xiaojin, LIN Ying, and LIU Jilin. 3D LiDAR-camera extrinsic calibration using an arbitrary trihedron[J]. Sensors, 2013, 13(2): 1902–1918. doi: 10.3390/s130201902.
[7]
PARK Y, YUN S, WON C S, et al. Calibration between color camera and 3D LiDAR instruments with a polygonal planar board[J]. Sensors, 2014, 14(3): 5333–5353. doi: 10.3390/s140305333.
[8]
PUSZTAI Z and HAJDER L. Accurate calibration of LiDAR-camera systems using ordinary boxes[C]. 2017 IEEE International Conference on Computer Vision Workshops, Venice, Italy, 2017: 394–402. doi: 10.1109/ICCVW.2017.53.
[9]
DHALL A, CHELANI K, RADHAKRISHNAN V, et al. LiDAR-camera calibration using 3D-3D point correspondences[OL]. https://arxiv.org/abs/1705.09785. 2017. doi: 10.48550/arXiv.1705.09785.
[10]
ZHANG Juyong, YAO Yuxin, and DENG Bailin. Fast and robust iterative closest point[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(7): 3450–3466. doi: 10.1109/TPAMI.2021.3054619.
XIE Jingting, LIN Xiaohu, WANG Fuhong, et al. Extrinsic calibration method for LiDAR and camera with joint point-line-plane constraints[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1916–1923. doi: 10.13203/j.whugis20210313.
[13]
BELTRÁN J, GUINDEL C, DE LA ESCALERA A, et al. Automatic extrinsic calibration method for LiDAR and camera sensor setups[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17677–17689. doi: 10.1109/TITS.2022.3155228.
[14]
PEREIRA M, SILVA D, SANTOS V, et al. Self calibration of multiple LiDARs and cameras on autonomous vehicles[J]. Robotics and Autonomous Systems, 2016, 83: 326–337. doi: 10.1016/j.robot.2016.05.010.
[15]
TÓTH T, PUSZTAI Z, and HAJDER L. Automatic LiDAR-camera calibration of extrinsic parameters using a spherical target[C]. 2020 IEEE International Conference on Robotics and Automation, Paris, France, 2020: 8580–8586. doi: 10.1109/ICRA40945.2020.9197316.
[16]
LEVINSON J and THRUN S. Automatic online calibration of cameras and lasers[C]. Robotics: Science and Systems IX, Berlin, Germany, 2013: 1–8. doi: 10.15607/RSS.2013.IX.029.
[17]
PANDEY G, MCBRIDE J R, SAVARESE S, et al. Automatic targetless extrinsic calibration of a 3D LiDAR and camera by maximizing mutual information[C]. 26th AAAI Conference on Artificial Intelligence, Toronto, Ontario, Canada, 2012: 2053–2059.
[18]
KANG J and DOH N L. Automatic targetless camera-LiDAR calibration by aligning edge with Gaussian mixture model[J]. Journal of Field Robotics, 2020, 37(1): 158–179. doi: 10.1002/rob.21893.
[19]
CASTORENA J, KAMILOV U S, and BOUFOUNOS P T. Autocalibration of LiDAR and optical cameras via edge alignment[C]. 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 2016: 2862–2866. doi: 10.1109/ICASSP.2016.7472200.
[20]
ISHIKAWA R, OISHI T, and IKEUCHI K. LiDAR and camera calibration using motions estimated by sensor fusion odometry[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 2018: 7342–7349. doi: 10.1109/IROS.2018.8593360.
[21]
HUANG Kaihong and STACHNISS C. Extrinsic multi-sensor calibration for mobile robots using the Gauss-Helmert model[C]. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 2017: 1490–1496. doi: 10.1109/IROS.2017.8205952.
[22]
QIU Kejie, QIN Tong, PAN Jie, et al. Real-time temporal and rotational calibration of heterogeneous sensors using motion correlation analysis[J]. IEEE Transactions on Robotics, 2021, 37(2): 587–602. doi: 10.1109/TRO.2020.3033698.
ZHAO Liang, HU Jie, LIU Han, et al. Deep learning based on semantic segmentation for three-dimensional object detection from point clouds[J]. Chinese Journal of Lasers, 2021, 48(17): 1710004. doi: 10.3788/CJL202148.1710004.
[24]
LI Shengyu, LI Xingxing, CHEN Shuolong, et al. Two-step LiDAR/camera/IMU spatial and temporal calibration based on continuous-time trajectory estimation[J]. IEEE Transactions on Industrial Electronics, 2024, 71(3): 3182–3191. doi: 10.1109/TIE.2023.3270506.
ZHONG Xungao, XU Min, ZHONG Xunyu, et al. Multimodal features deep learning for robotic potential grasp recognition[J] Acta Automatica Sinica, 2016, 42(7): 1022–1029. doi: 10.16383/j.aas.2016.c150661.
[26]
KENDALL A, GRIMES M, and CIPOLLA R. PoseNet: A convolutional network for real-time 6-Dof camera relocalization[C]. 2015 IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 2938–2946. doi: 10.1109/ICCV.2015.336.
[27]
QI C R, SU Hao, MO Kaichun, et al. PointNet: Deep learning on point sets for 3D classification and segmentation[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017: 77–85. doi: 10.1109/CVPR.2017.16.
[28]
QI C R, YI Li, SU Hao, et al. PointNet++: Deep hierarchical feature learning on point sets in a metric space[C]. The 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 2017: 5105–5114.
[29]
SCHNEIDER N, PIEWAK F, STILLER C, et al. RegNet: Multimodal sensor registration using deep neural networks[C]. 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 2017: 1803–1810. doi: 10.1109/IVS.2017.7995968.
[30]
WU Shan, HADACHI A, VIVET D, et al. NetCalib: A novel approach for LiDAR-camera auto-calibration based on deep learning[C]. The 25th International Conference on Pattern Recognition, Milan, Italy, 2021: 6648–6655. doi: 10.13140/RG.2.2.13266.79048.
[31]
IYER G, RAM R K, MURTHY J K, et al. CalibNet: Geometrically supervised extrinsic calibration using 3D spatial transformer networks[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 2018: 1110–1117. doi: 10.1109/IROS.2018.8593693.
[32]
LV Xudong, WANG Shuo, and YE Dong. CFNet: LiDAR-camera registration using calibration flow network[J]. Sensors, 2021, 21(23): 8112. doi: 10.3390/s21238112.
[33]
LV Xudong, WANG Boya, DOU Ziwen, et al. LCCNet: LiDAR and camera self-calibration using cost volume network[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Nashville, TN, USA, 2021: 2888–2895. doi: 10.1109/CVPRW53098.2021.00324.
ZHOU Tinghui, BROWN M, SNAVELY N, et al. Unsupervised learning of depth and ego-motion from video[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017: 6612–6619. doi: 10.1109/CVPR.2017.700.
[36]
LI Ruihao, WANG Sen, LONG Zhiqiang, et al. UnDeepVO: Monocular visual odometry through unsupervised deep learning[C]. 2018 IEEE International Conference on Robotics and Automation, Brisbane, QLD, Australia, 2018: 7286–7291. doi: 10.1109/ICRA.2018.8461251.
ZHANG Chongsheng, CHEN Jie, LI Qilong, et al. Deep contrastive learning: A survey[J]. Acta Automatica Sinica, 2023, 49(1): 15–39. doi: 10.16383/j.aas.c220421.
[38]
HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016: 770–778. doi: 10.1109/CVPR.2016.90.
[39]
WU T, PAN L, ZHANG J, et al. Density-aware chamfer distance as a comprehensive metric for point cloud completion[OL]. https://arxiv.org/abs/2111.12702. 2021. doi: 10.48550/arXiv.2111.12702.
[40]
GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: The KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231–1237. doi: 10.1177/0278364913491297.
[41]
KINGMA D P and BA J. Adam: A method for stochastic optimization[OL]. https://arxiv.org/abs/1412.6980. 2014. doi: 10.48550/arXiv.1412.6980.
[42]
YE Chao, PAN Huihui, and GAO Huijun. Keypoint-based LiDAR-camera online calibration with robust geometric network[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 2503011. doi: 10.1109/TIM.2021.3129882.
LIU Hui, MENG Liwen, DUAN Yijian, et al. Online calibration method of lidar-visual sensor external parameters based on 4D correlation pyramid[J]. Chinese Journal of Lasers, 2024, 51(17): 1704003. doi: 10.3788/CJL231290.

 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work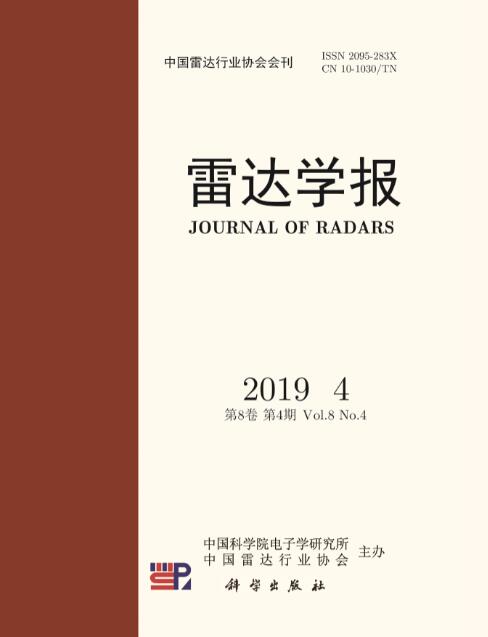

 下载:
下载:







 本站查看
本站查看





 DownLoad:
DownLoad:




