
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | WANG Chao, WANG Yanfei, LIU Chang, et al. A new approach to range cell migration correction for ground moving targets in high-resolution SAR system based on parameter estimation[J]. Journal of Radars, 2019, 8(1): 64–72. doi: 10.12000/JR18054

|
A New Approach to Range Cell Migration Correction for Ground Moving Targets in High-resolution SAR System Based on Parameter Estimation
DOI: 10.12000/JR18054 CSTR: 32380.14.JR18054
More Information-
Abstract
Range Cell Migration Correction (RCMC) represents an important advance in moving target imaging in the airborne single antenna high-resolution SAR system. In this paper, we propose a new four-step RCMC approach combined with parameter estimation that overcomes the drawbacks of high computation and low accuracy in high-resolution. First, we use the Hough transform and the energy balancing method to estimate the range velocity and correct the range walk. Next, we perform a range curvature correction in the range-Doppler domain by using the initial Doppler rate. Thirdly, we accurately estimate the Doppler rate using Map-drift technology. Finally, we correct the residual range curvature by the accurate Doppler rate. Compared with traditional algorithms, the proposed method requires less computation and is robust in the high-resolution SAR system. In this paper, we present a mathematical model and validate its effectiveness using both simulation and real data. -

-
References
[1] 李道京, 张麟兮, 俞卞章. 近程SAR图像中的地面运动目标检测[J]. 西北工业大学学报, 2003, 21(6): 744–748. doi: 10.3969/j.issn.1000-2758.2003.06.026LI Dao-jing, ZHANG Lin-xi, and YU Bian-zhang. On detecting effectively ground moving target with single-antenna-single-channel short-range SAR[J]. Journal of Northwestern Polytechnical University, 2003, 21(6): 744–748. doi: 10.3969/j.issn.1000-2758.2003.06.026[2] 周峰, 李亚超, 邢孟道, 等. 一种单通道SAR地面运动目标成像和运动参数估计方法[J]. 电子学报, 2007, 35(3): 543–548. doi: 10.3321/j.issn:0372-2112.2007.03.033ZHOU Feng, LI Ya-chao, XING Meng-dao, et al. An effective approach to ground moving target imaging and motion parameter estimation for single channel SAR system[J]. Acta Electronica Sinica, 2007, 35(3): 543–548. doi: 10.3321/j.issn:0372-2112.2007.03.033[3] 汤立波, 李道京, 吴一戎, 等. 机载SAR的地面运动目标成像处理[J]. 系统工程与电子技术, 2005, 27(10): 1681–1684. doi: 10.3321/j.issn:1001-506X.2005.10.004TANG Li-bo, LI Dao-jing, WU Yi-rong, et al. Imaging of ground moving targets based on airborne SAR[J]. Systems Engineering and Electronics, 2005, 27(10): 1681–1684. doi: 10.3321/j.issn:1001-506X.2005.10.004[4] PERRY R P, DIPIETRO R C, and FANTE R L. SAR imaging of moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 188–200. doi: 10.1109/7.745691[5] ZHOU F, WU R B, XING M D, et al. Approach for single channel SAR ground moving target imaging and motion parameter estimation[J]. IET Radar, Sonar & Navigation, 2007, 1(1): 59–66. doi: 10.1049/iet-rsn.20060040[6] 范健华, 李春林. 基于FPGA的Keystone变换算法设计和实现[J]. 电子科技, 2016, 29(6): 54–57. doi: 10.16180/j.cnki.issn1007-7820.2016.06.016FAN Jian-hua and LI Chun-lin. Design and implementation of Keystone transform based on FPGA[J]. Electronic Science and Technology, 2016, 29(6): 54–57. doi: 10.16180/j.cnki.issn1007-7820.2016.06.016[7] CAO Y F, QU X G, and HUANG P K. Research on Keystone formatting based on non-baseband interpolation[J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 562–565. doi: 10.3969/j.issn.1004-4132.2010.04.006[8] 朱圣棋, 廖桂生, 曲毅, 等. 机载正侧视合成孔径雷达地面运动目标参数估计方法[J]. 电子学报, 2010, 38(12): 2757–2762.ZHU Sheng-qi, LIAO Gui-sheng, QU Yi, et al. An approach of ground moving target motion parameter estimation for airborne sidelooking SAR system[J]. Acta Electronica Sinica, 2010, 38(12): 2757–2762.[9] LI Y K, WANG Y F, and LIU C. Detect and autofocus the moving target by its range walk in time domain[C]. Proceedings of 2011 International Conference on Wireless Communications and Signal Processing, Nanjing, 2011: 1–5. doi: 10.1109/WCSP.2011.6096755.[10] 汤立波. 高分辨率机载SAR地面/海面运动目标成像技术研究[D]. [博士论文], 中国科学院电子学研究所, 2006: 53–54.TANG Li-bo. Imaging techniques of ground/sea moving targets for high resolution airborne SAR[D]. [Ph.D. dissertation], Institute of Electrics, Chinese Academy of Sciences, 2006: 53–54.[11] CUMMING I G and WONG F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Boston: Artech House Publishers, 2005: 337, 165.[12] CANTALLOUBE H M J and NAHUM C E. Multiscale local map-drift-driven multilateration SAR autofocus using fast polar format image synthesis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3730–3736. doi: 10.1109/TGRS.2011.2161319[13] WAHL D E, EICHEL P H, GHIGLIA D C, et al. Phase gradient autofocus—A robust tool for high resolution SAR phase correction[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(3): 827–835. doi: 10.1109/7.303752[14] FREEMAN A and CURRIE A. Synthetic aperture radar (SAR) images of moving targets[J]. GEC Journal of Research, 1987, 5(2): 106–115. doi: 10.1117/12.932852 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

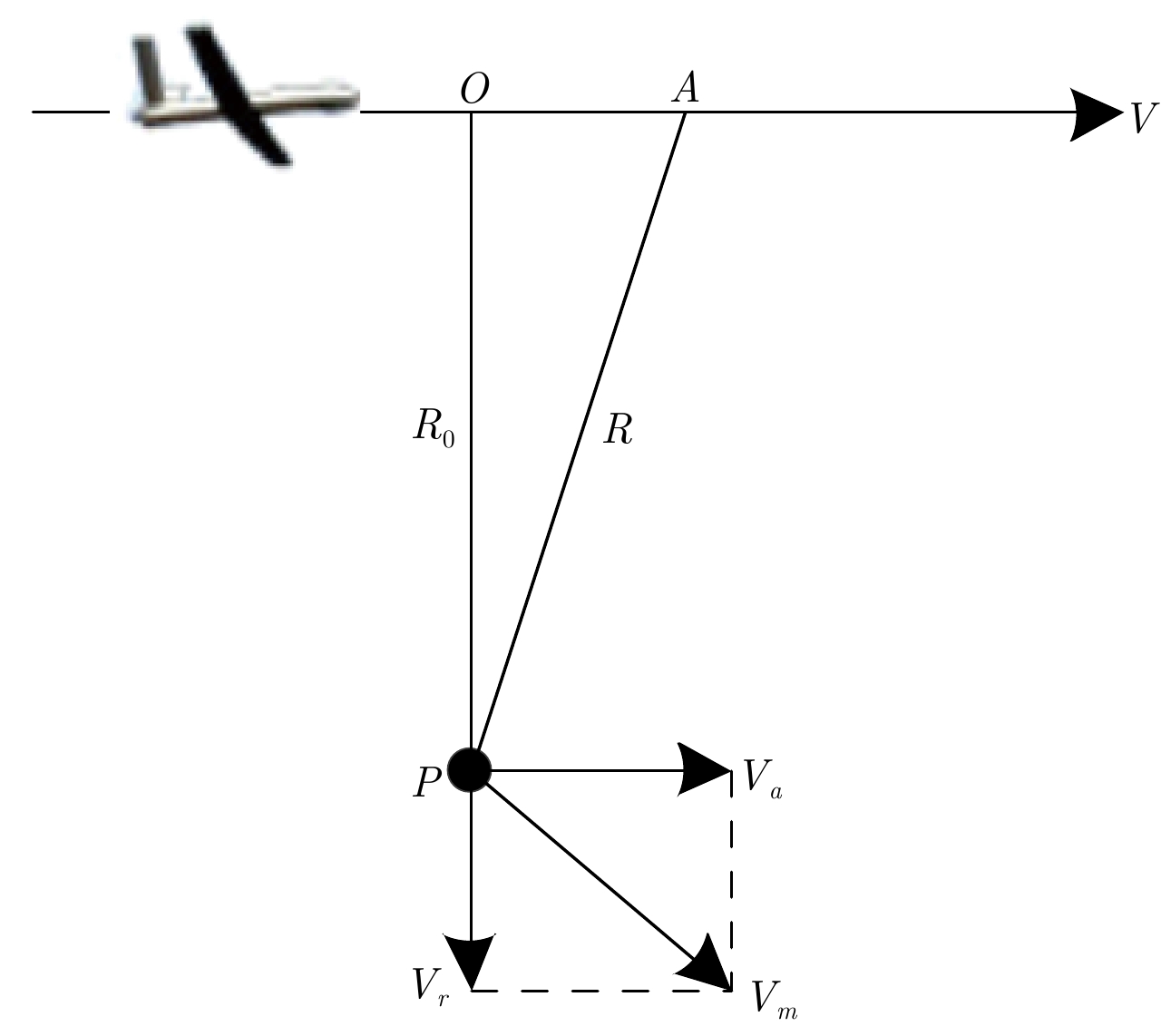
- Figure 1. Relationship of moving target and radar
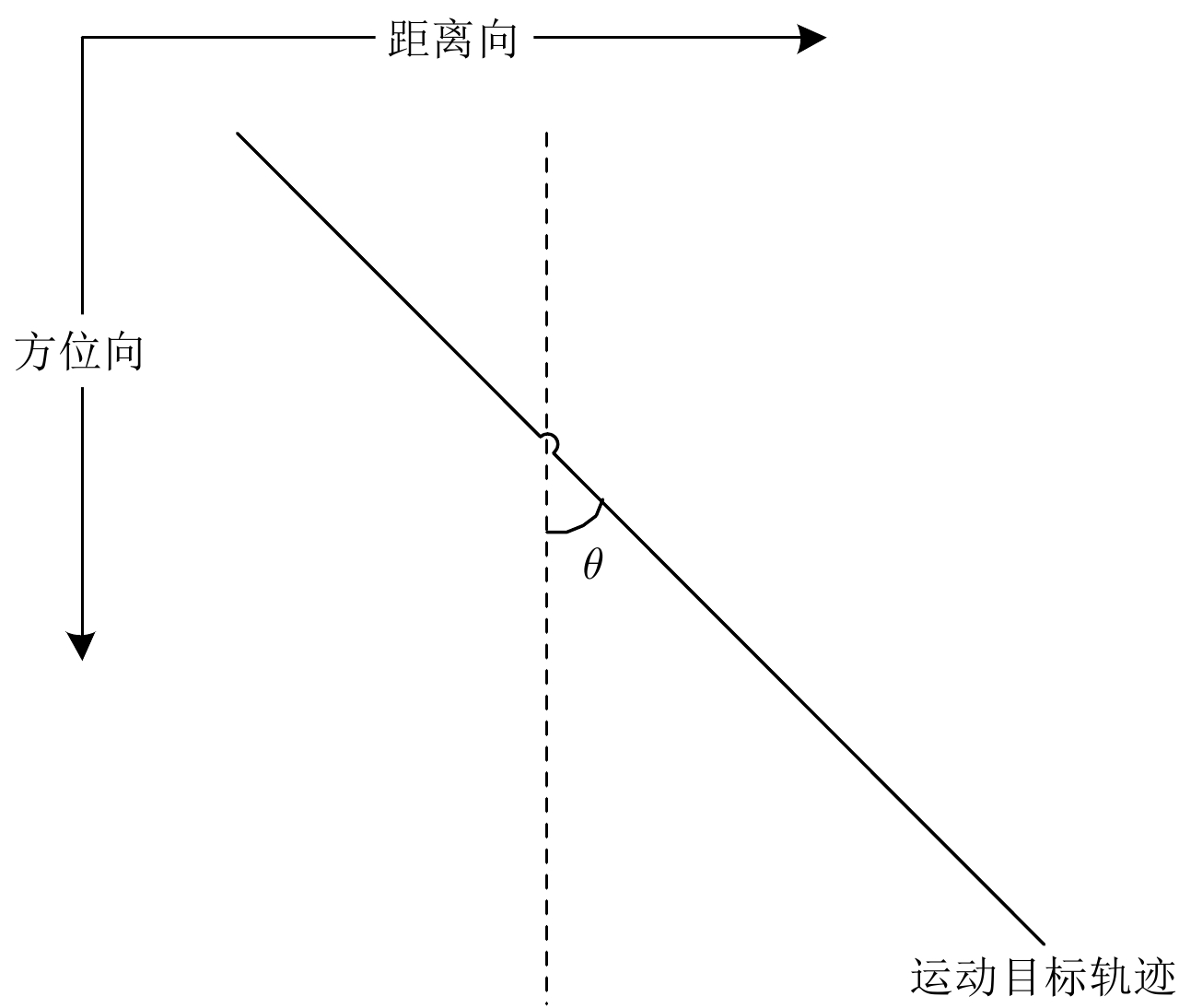
- Figure 2. Estimation of range velocity by target trajectory
- Figure 3. Processing steps of the proposed method
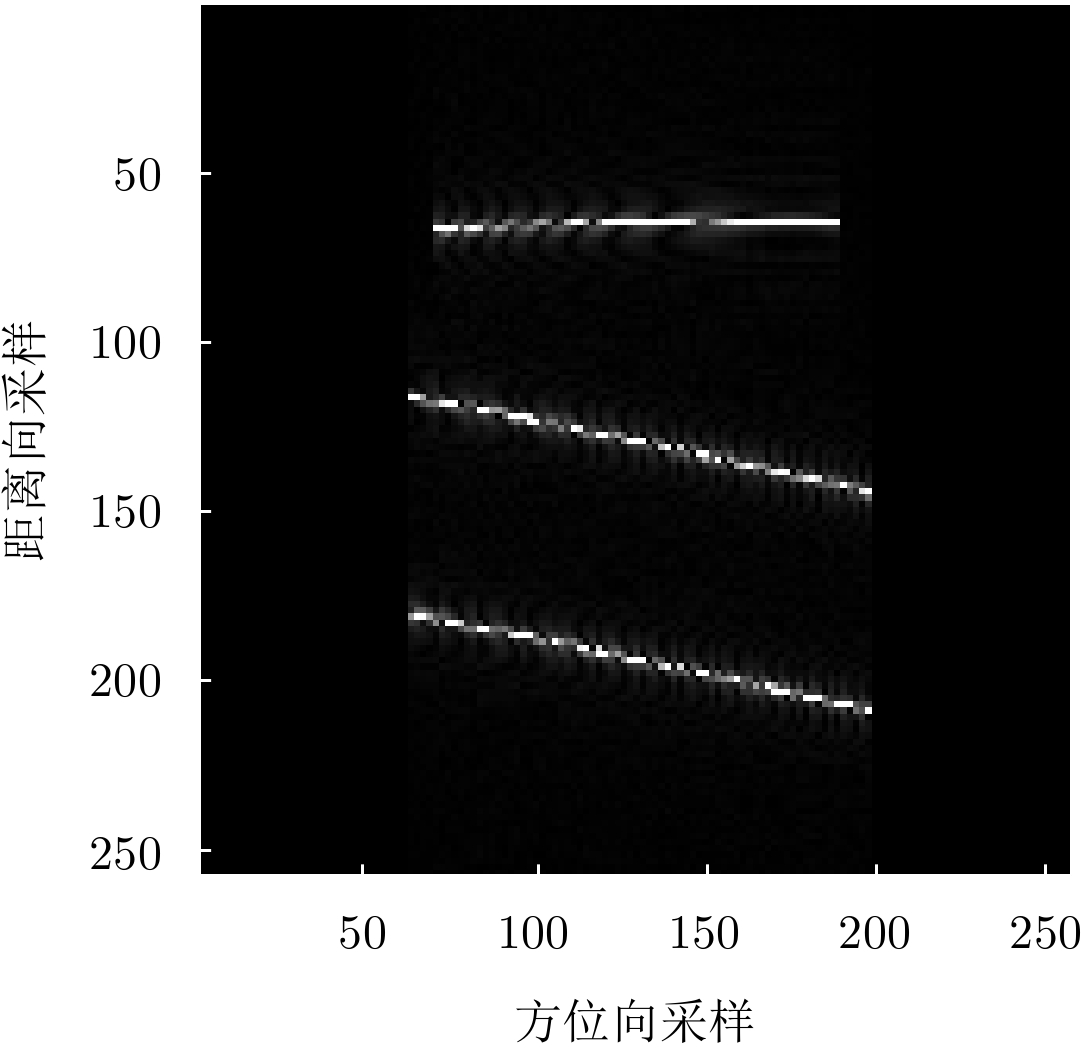
- Figure 4. Target trajectories after range compression
- Figure 5. Comparison of range walk correction
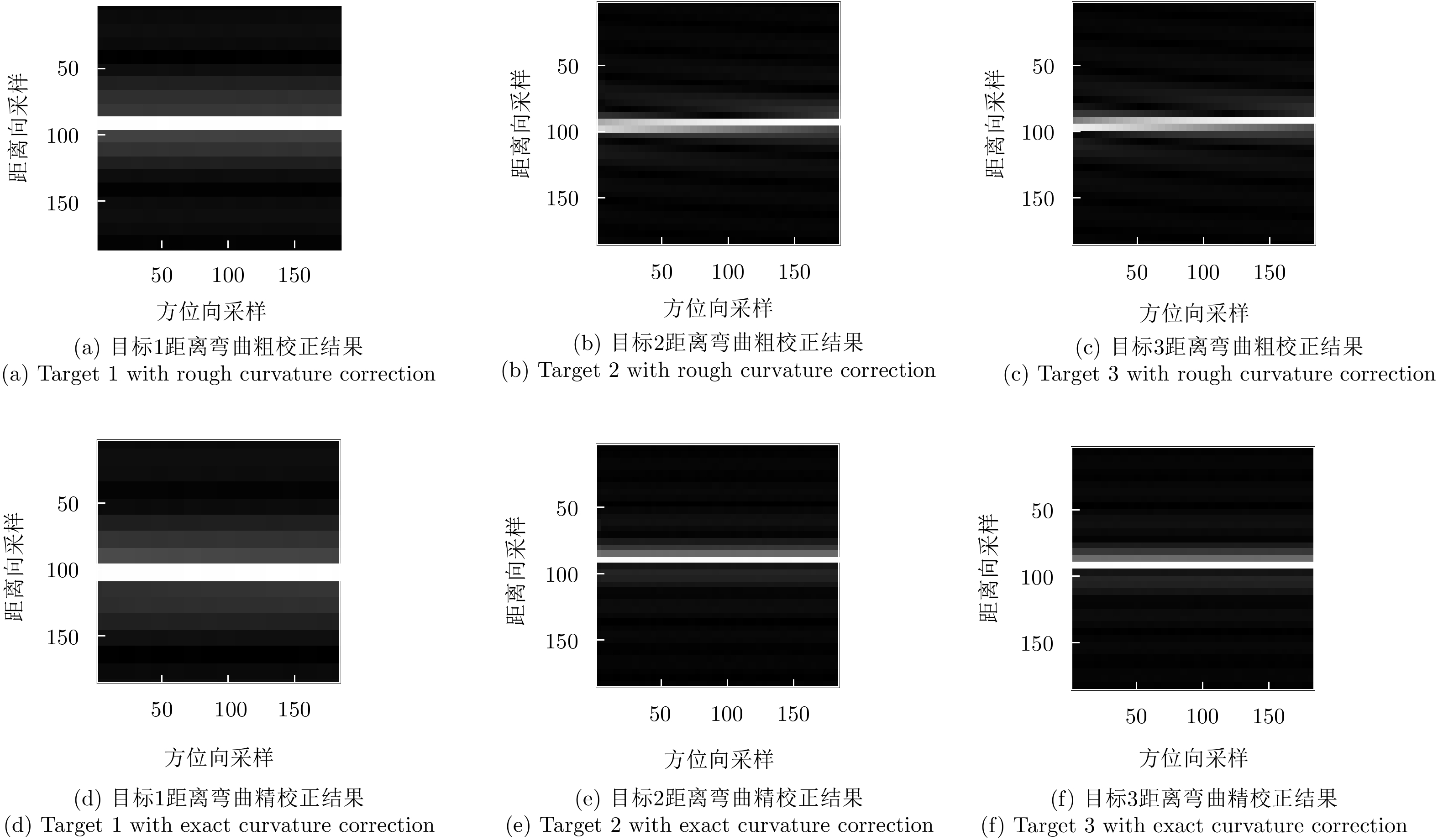
- Figure 6. Comparison of range curvature correction
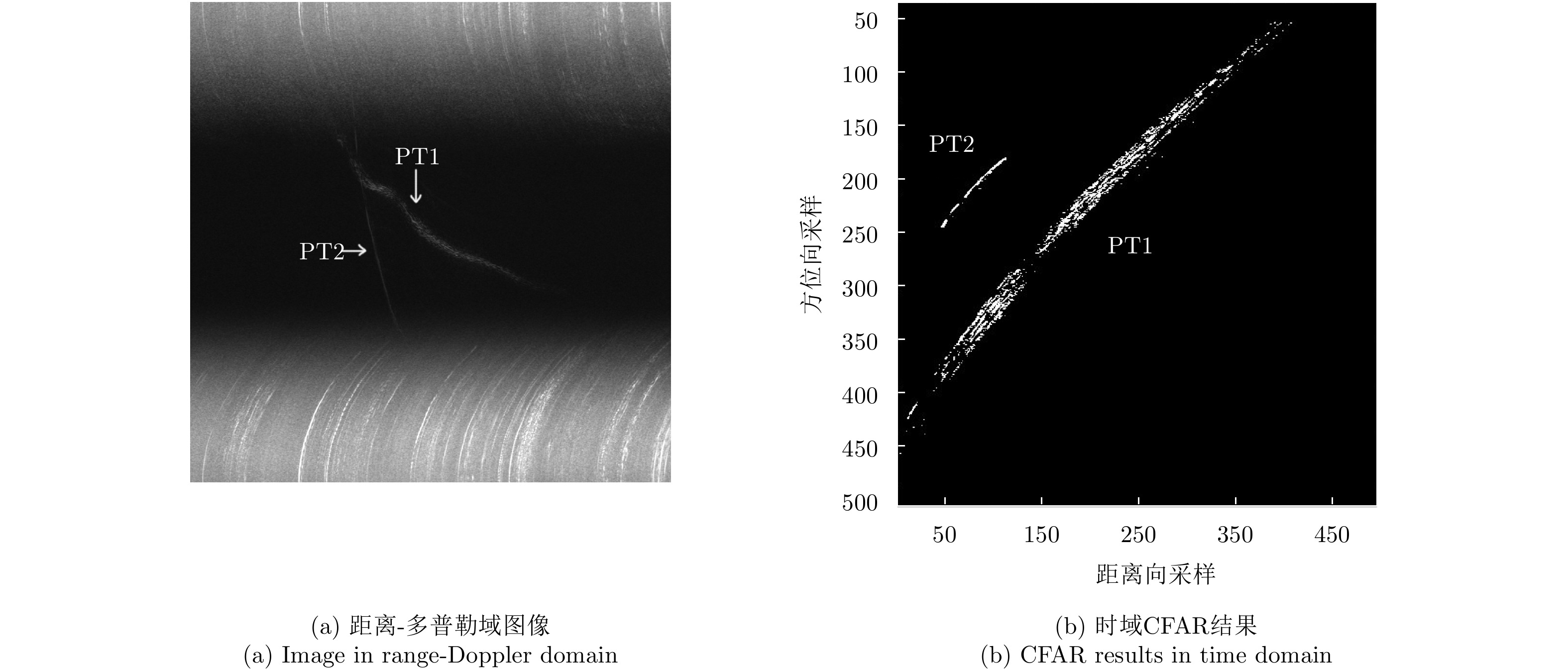
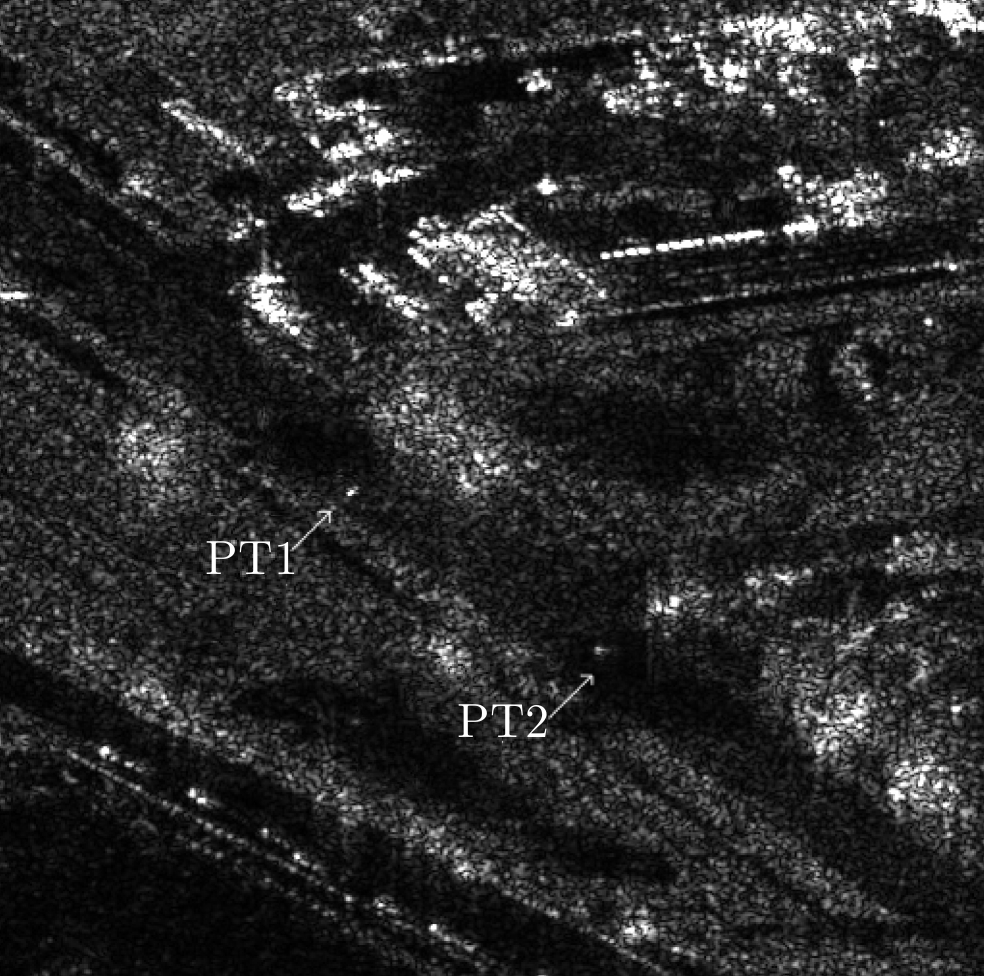
- Figure 7. Detection of moving targets
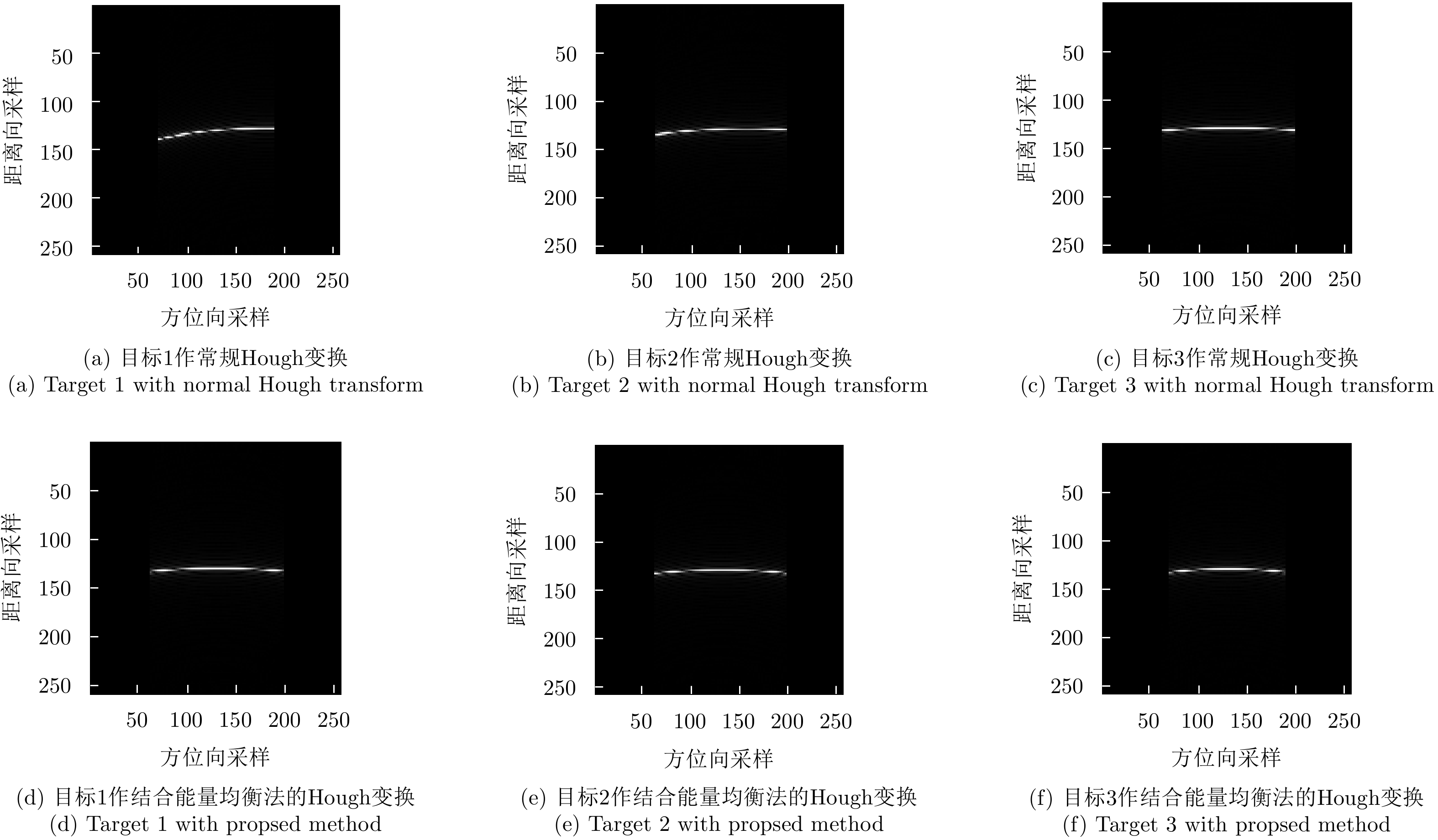
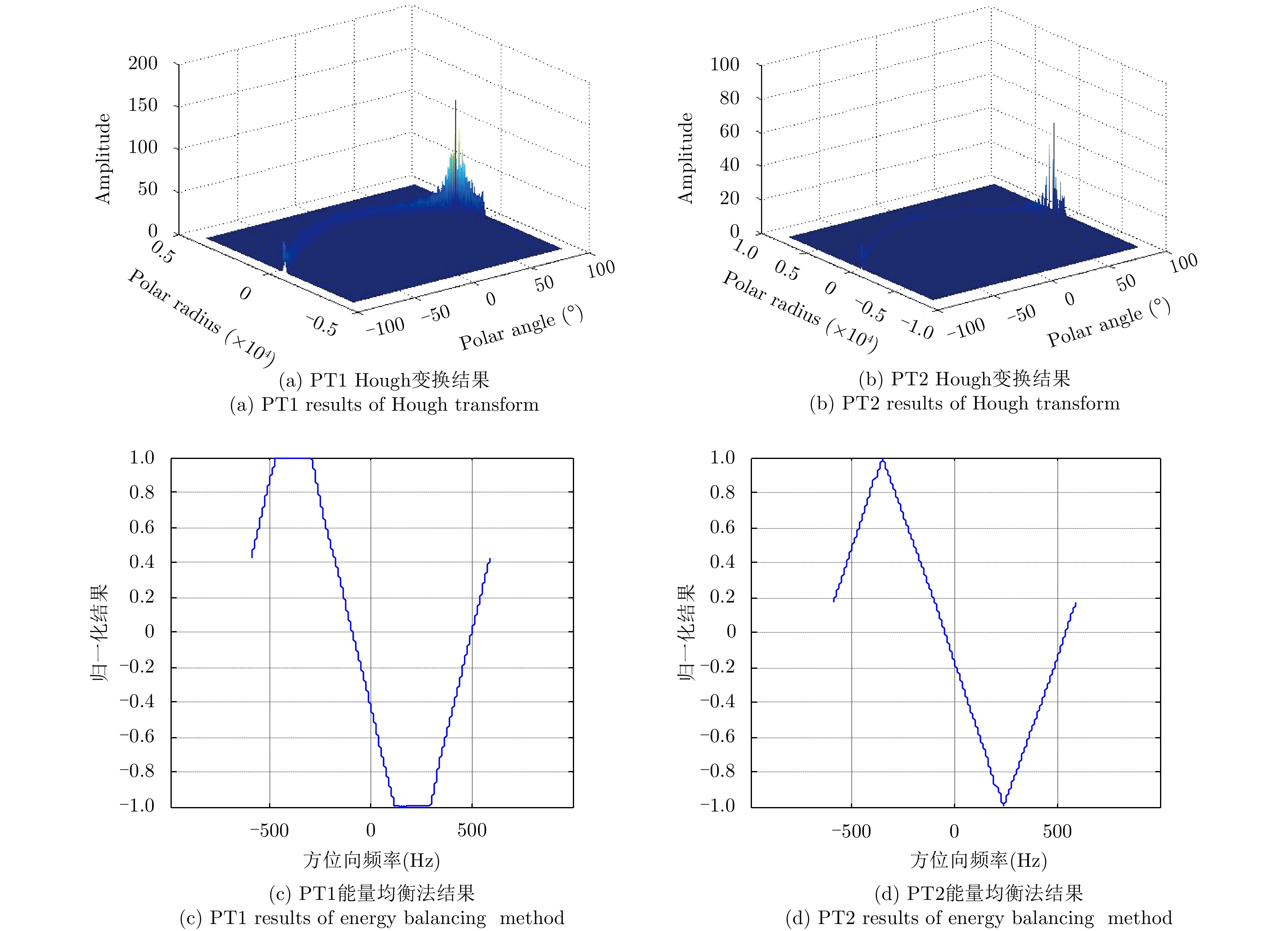
- Figure 8. Results of Hough transform with energy balancing method
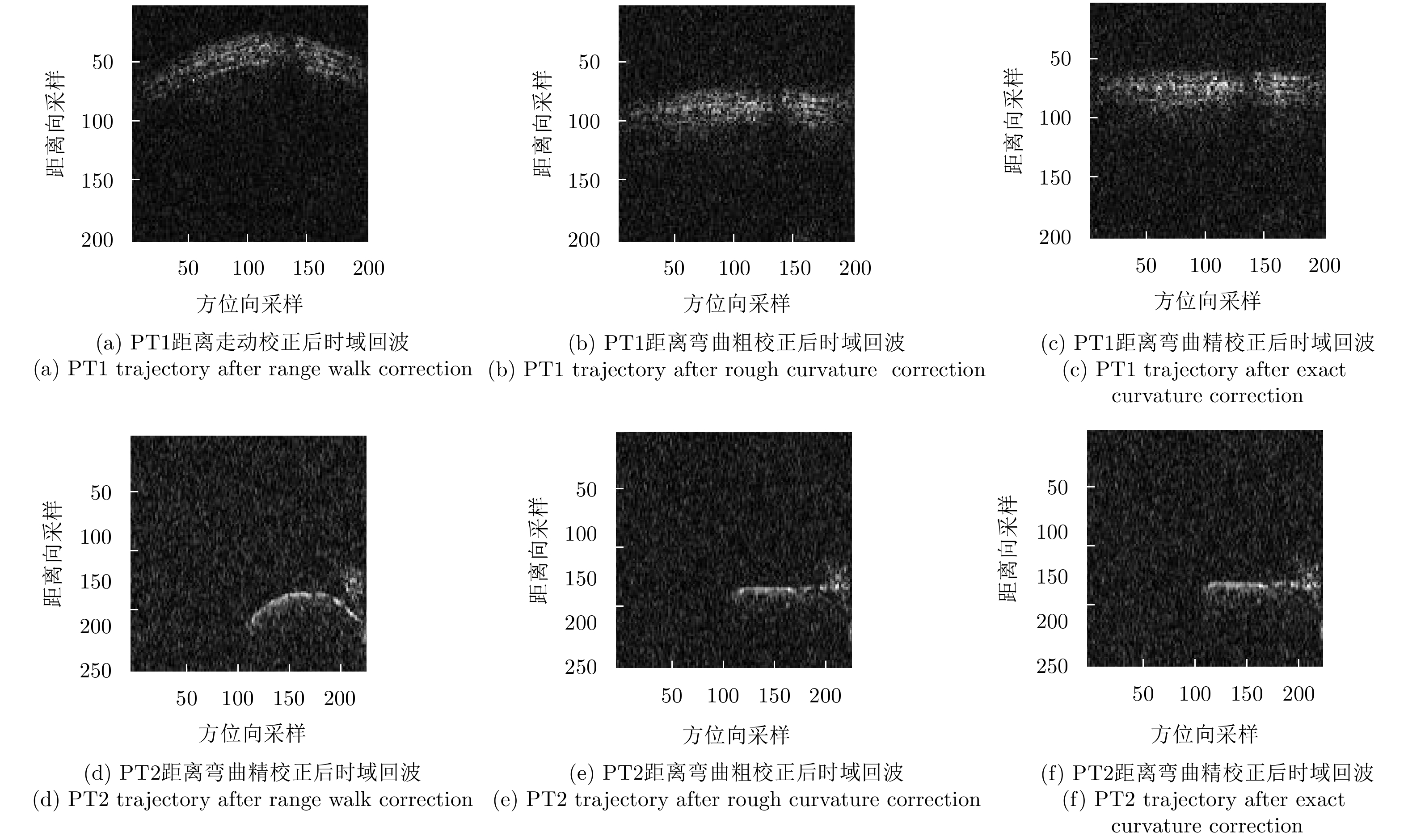
- Figure 9. Comparison of RCMC
- Figure 10. Composite SAR image with stationary scenes and focused moving targets