
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | Jiang Yanwen, Deng Bin, Wang Hongqiang, Qin Yuliang, Zhuang Zhaowen. Improved Terahertz InISAR Imaging Method Based on Joint Processing of Dual-frequency Data[J]. Journal of Radars, 2018, 7(1): 139-146. doi: 10.12000/JR17109

|
Improved Terahertz InISAR Imaging Method Based on Joint Processing of Dual-frequency Data
DOI: 10.12000/JR17109 CSTR: 32380.14.JR17109
-
Abstract
To improve the imaging accuracy of Interferometry Inverse Synthetic Aperture Radar (InISAR), in this paper, we propose a novel method based on the joint processing of dual-frequency data. First, we divide the radar echo into two parts in the fast-time domain, then we apply the conventional InISAR method to each dataset. By comparing and analyzing the imaging results of the two parts, we can identify and remove redundant and bad pixels. Using the proposed joint processing method, we obtained the InISAR imaging results of a scatter model of an airplane and calculated the Root Mean Square Error (RMSE). The simulation results show that the proposed method can effectively improve imaging accuracy with different Signal-to-Noise Ratio (SNR). -

-
References
[1] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005.Bao Zheng, Xing Meng-dao, and Wang Tong. Technology of Radar Imaging[M]. Beijing: Publishing House of Electronics Industry, 2005.[2] Zhang X P, Liao G S, Zhu S Q, et al.. An unambiguous radial velocity estimation method based on interferometric phase in range frequency domain[C]. Proceedings of the 14th International Radar Symposium (IRS), Dresden, Germany, 2013, 1: 543–548.[3] 毕严先, 魏少明, 王俊, 等. 基于最小二乘估计的InISAR空间目标三维成像方法[J]. 电子与信息学报, 2016, 38(5): 1079–1084. DOI: 10.11999/JEIT151000Bi Yan-xian, Wei Shao-ming, Wang Jun, et al. Interferometric ISAR imaging for 3-D geometry of uniformly rotating targets based on least squares estimation method[J]. Journal of Electronics&Information Technology, 2016, 38(5): 1079–1084. DOI: 10.11999/JEIT151000[4] Wu W Z, Hu P H, Xu S Y, et al. Image registration for InISAR based on joint translational motion compensation[J]. IET Radar,Sonar&Navigation, 2017, 11(10): 1597–1603.[5] Ma M, Li D J, Du J B, et al.. Signal processing of InISAR with Long orthogonal baselines for air target three-dimensional localization[C]. Proceedings of EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 2016: 1–4.[6] 牧凯军, 张振伟, 张存林. 太赫兹科学与技术[J]. 中国电子科学研究院学报, 2009, 4(3): 221–230, 237Mu Kai-jun, Zhang Zhen-wei, and Zhang Cun-lin. Terahertz science and technology[J]. Journal of China Academy of Electronics and Information Technology, 2009, 4(3): 221–230, 237[7] Siegel P H. Terahertz technology[J]. IEEE Transactions on Microwave Theory and Techniques, 2002, 50(3): 910–928. DOI: 10.1109/22.989974[8] Siegel P H. THz for space: The golden age[C]. Proceedings of IEEE MTT-S International Microwave Symposium Digest (MTT), Anaheim, CA, USA, 2010: 816–819.[9] Deng Bin, Chen Shuo, Luo Chneg-gao, et al. Review of terahertz coded-aperture imaging[J]. Journal of Infrared and Millimeter Waves, 2017, 36(3): 302–310.[10] Jiang Y W, Deng B, Wang H Q, et al. An effective nonlinear phase compensation method for FMCW terahertz radar[J]. IEEE Photonics Technology Letters, 2016, 28(15): 1684–1687. DOI: 10.1109/LPT.2016.2558462[11] Li D J, Ma M, Du J B, et al.. Moving target imaging detection for millimeter-wave InISAR[C]. Proceedings of EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 2016: 286–289.[12] 刘承兰, 高勋章, 黎湘. 干涉式逆合成孔径雷达成像技术综述[J]. 信号处理, 2011, 27(5): 737–748Liu Cheng-lan, Gao Xun-zhang, and Li Xiang. Review of interferometric ISAR imaging[J]. Signal Processing, 2011, 27(5): 737–748[13] Zhang Q and Yeo T S. Three-dimensional SAR imaging of a ground moving target using the InISAR technique[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(9): 1818–1828. DOI: 10.1109/TGRS.2004.831863[14] Wang Y and Li X L. Three-dimensional interferometric ISAR imaging for the ship target under the Bi-static configuration[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(4): 1505–1520. DOI: 10.1109/JSTARS.2015.2513774[15] 马萌, 李道京, 李烈辰, 等. 正交长基线毫米波InISAR运动目标三维成像[J]. 红外与毫米波学报, 2016, 35(4): 488–495. DOI: 10.11972/j.issn.1001-9014.2016.04.018Ma Meng, Li Dao-jing, Li Lie-chen, et al. 3-D imaging for moving targets based on millimeter-wave InISAR with long orthogonal baselines[J]. Journal of Infrared and Millimeter Waves, 2016, 35(4): 488–495. DOI: 10.11972/j.issn.1001-9014.2016.04.018[16] Xu G, Xing M D, Xia X G, et al. 3D geometry and motion estimations of maneuvering targets for interferometric ISAR with sparse aperture[J]. IEEE Transactions on Image Processing, 2016, 25(5): 2005–2020. DOI: 10.1109/TIP.2016.2535362[17] 刘承兰, 高勋章, 贺峰, 等. 一种基于相位校正的InISAR图像配准新方法[J]. 国防科技大学学报, 2011, 33(5): 116–122Liu Cheng-lan, Gao Xun-zhang, He Feng, et al. A novel method for image registration in InISAR imaging based on phase correction[J]. Journal of National University of Defense Technology, 2011, 33(5): 116–122[18] 张冬晨. InISAR三维成像的关键技术研究[D]. [博士论文], 中国科学技术大学, 2009.Zhang Dong-chen. Research on the key techniques of interferometric inverse synthetic aperture radar imaging[D]. [Ph.D. dissertation], University of Science and Technology of China, 2009.[19] 刘承兰. 干涉逆合成孔径雷达(InISAR)三维成像技术研究[D]. [博士论文], 国防科学技术大学, 2012.Liu Cheng-lan. Research on interferometric inverse synthetic aperture radar three-dimensional imaging[D]. [Ph. D. dissertation], National University of Defense Technology, 2012.[20] Richards M A. 邢孟道, 王彤, 李真芳, 等译. 雷达信号处理基础[M]. 北京: 电子工业出版社, 2010.Richards M A. Xing Meng-dao, Wang Tong, Li Zhen-fang, et al Translation. Fundamentals of Radar Signal Processing[M]. Beijing: Publishing House of Electronics Industry, 2010. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


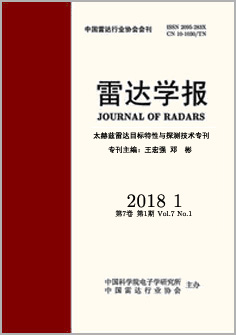
- Figure 1. InISAR imaging geometry with L-antennas
- Figure 3. The 3D scatter model of airplane
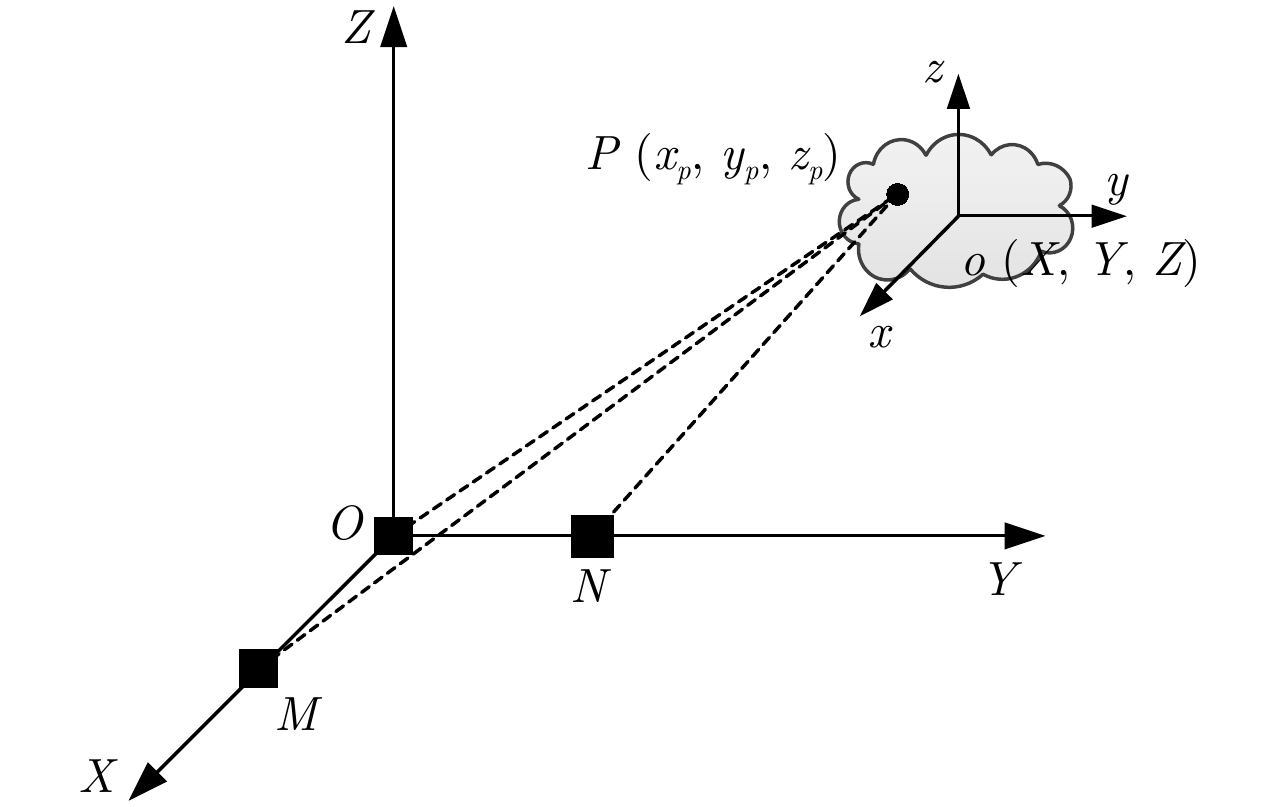
- Figure 2. The InISAR imaging method based on the joint processing of dual-frequency data
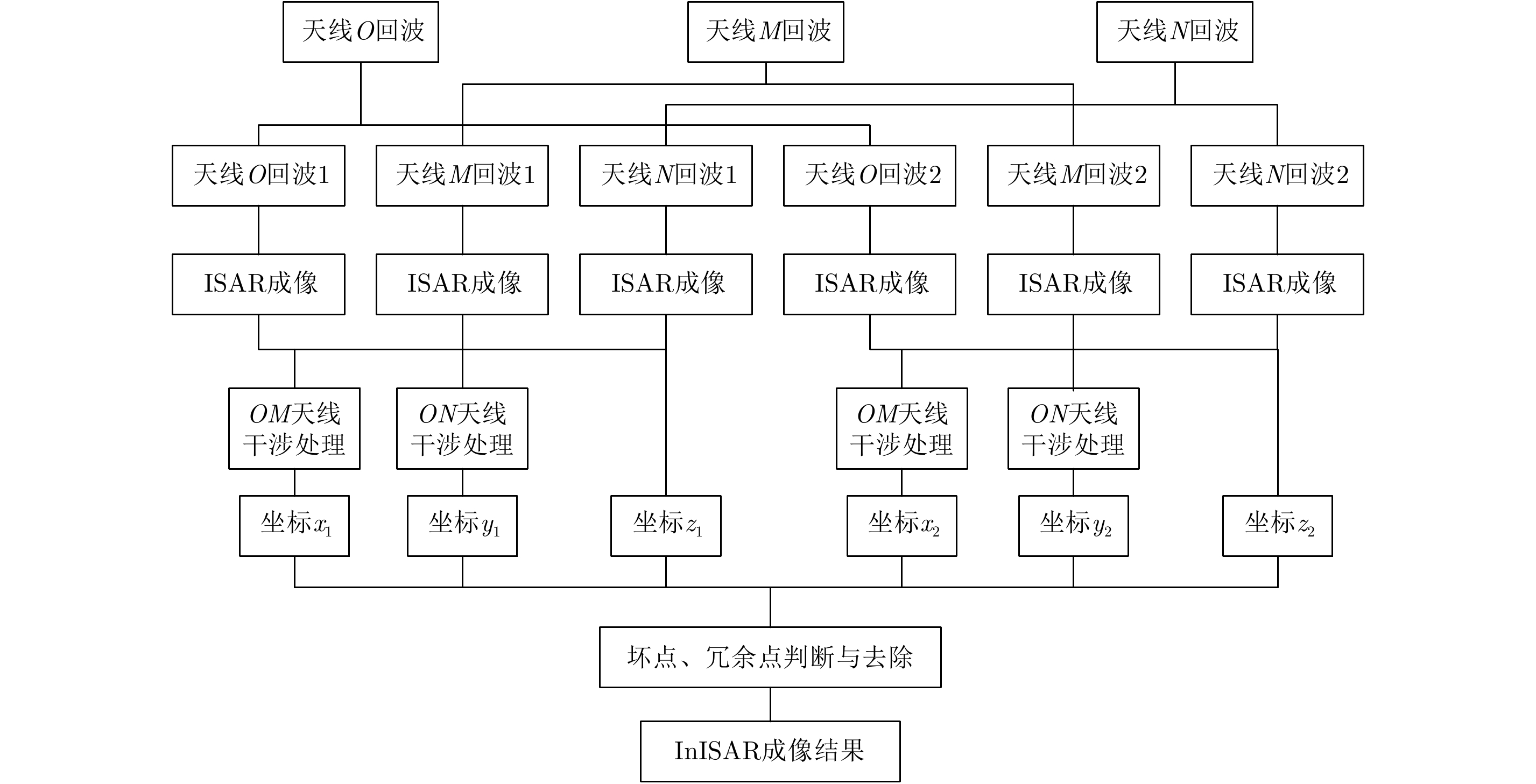
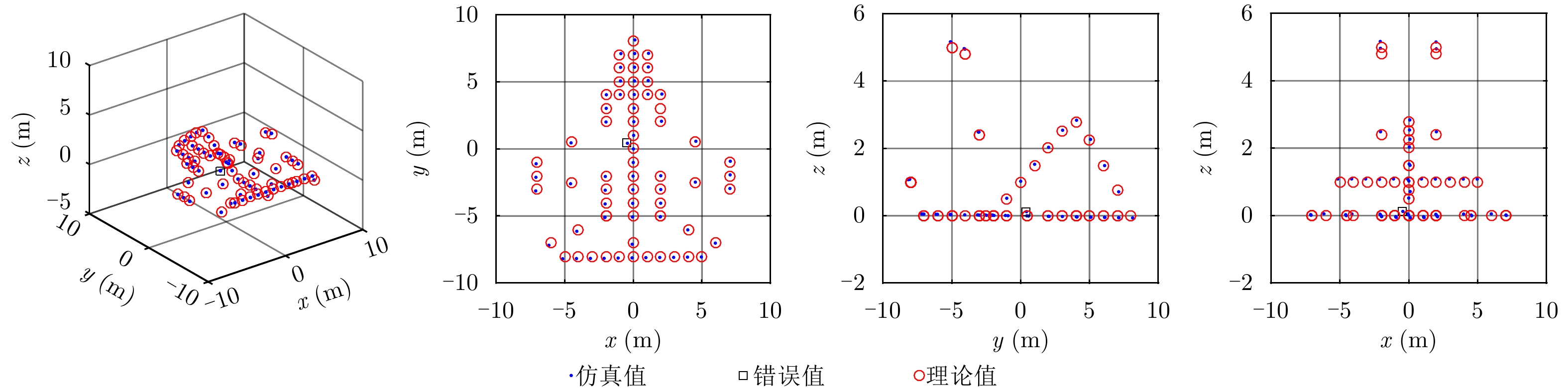
- Figure 4. The 3D InISAR imaging result based on the joint processing of dual-frequency data
- Figure 5. The 3D InISAR imaging result based on the conventional method
- Figure 6. The error comparison between the proposed method and the conventional method