
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Wu Sunyong, Xue Qiutiao, Zhu Shengqi, Yan Qingzhu, Sun Xiyan. Track-Before-Detect Algorithm for Weak Extended Target Based on Particle Filter under Clutter Environment[J]. Journal of Radars, 2017, 6(3): 252-258. doi: 10.12000/JR16128

|
Track-Before-Detect Algorithm for Weak Extended Target Based on Particle Filter under Clutter Environment
DOI: 10.12000/JR16128 CSTR: 32380.14.JR16128
-
Abstract
The Track-Before-Detect (TBD) algorithm based on the particle filter is proposed for weak extended target detection and tracking in low signal to clutter noise radio. The rod-shaped object is analyzed by dividing the cell on range and azimuth under the Weibull clutter. On the basis of a point target, the likelihood function and particle weights can be obtained by the target spread function. In the TBD algorithm, the binary target variable and the target shape parameters is added to the state vector and the scattering points in the sample collection is given based on the particle filter, which can detect and estimate the target state and the shape parameters under the clutter environment. Simulation results show that the stability of the algorithm is very good. -

-
References
[1] Rollason M and Salmond D J. A particle filter for track-before-detect of a target with unknown amplitude[J]. IEEE Digest, 2001, 3(4): 36–41.[2] Rutten M G, Gordon N J, Maskell S, et al.. Recursive track-before-detect with target amplitude fluctuations[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5): 345–352. doi: 10.1049/ip-rsn:20045041[3] TSOU Haiping and Yan T&Y. The extended-image tracking technique based on the maximum likelihood estimation[R]. New York: Jet Propulsion Laboratory, California Institute of Technology, 1999.[4] Gilholm K and Salmond D. Spatial distribution model for tracking extended objects[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5): 364–371. doi: 10.1049/ip-rsn:20045114[5] Feldmann M, Franken D, Koch W, et al.. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064[6] Fan L, Zhang X, Shi J, et al.. Track-before-detect procedures for detection of extended object[J]. EURASIP Journal on Advances in Signal Processing, 2011, 2011(1): 1–6. doi: 10.1186/1687-6180-2011-1[7] 吴兆平, 朱凯然, 苏涛, 等. 采用改进粒子滤波的雷达扩展目标检测前跟踪[J]. 西安电子大学学报(自然科学版), 2011, 38(2): 99–104. http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201102019.htmWu Zhao-ping, Zhu Kai-ran, Su Tao, et al.. Extended radar target tracking before detection using the modified particle filter[J]. Journal of Xidian University (Natural Science Edition), 2011, 38(2): 99–104. http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201102019.htm[8] 于洪波, 王国红, 王娜. 基于粒子滤波的扩展目标检测前跟踪算法[J]. 电光与控制, 2010, 17(8): 41–44. http://cdmd.cnki.com.cn/Article/CDMD-10336-1015564804.htmYu Hong-bo, Wang Guo-hong, and Wang Na. A track-before-detect algorithm for tracking extended targets based on particle filter[J]. Electronics Optics & Control, 2010, 17(8): 41–44. http://cdmd.cnki.com.cn/Article/CDMD-10336-1015564804.htm[9] 于洪波, 曹倩, 杨志刚. 一种基于扩展模型的隐身目标检测前跟踪方法[J]. 海军航空工程学院学报, 2014, 29(6): 569–574. doi: 10.7682/j.issn.1673-1522.2014.06.012Yu Hong-bo, Chao Qian, and Yang Zhi-gang. A method of stealthy target track-before-detect based on extended model[J]. Journal of Naval Aeronautical and Astronautical University, 2014, 29(6): 569–574. doi: 10.7682/j.issn.1673-1522.2014.06.012[10] 雷刚, 邵可然, 李燕斌, 等. 威布尔杂波背景下的恒虚警检测[J]. 华中科技大学学报(自然科学版), 2008, 36(3): 129–132. http://www.cnki.com.cn/Article/CJFDTOTAL-HZLG200803043.htmLei Gang, Shao Ke-ran, Li Yan-bin, et al.. Constant false alarm rate detection against Weibull clutter background[J]. Journal of Huazhong University of Science & Technolngy (Natural Science Edition), 2008, 36(3): 129–132. http://www.cnki.com.cn/Article/CJFDTOTAL-HZLG200803043.htm[11] 陈建军, 黄孟俊, 邱伟, 等. 海杂波下的双门限恒虚警目标检测新方法[J]. 电子学报, 2011, 39(9): 2135–2141. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201109031.htmChen Jian-jun, Huang Meng-jun, Qiu Wei, et al.. A novel method for CFAR detector with bi-thresholds in sea clutter[J]. Acta Electronica Sinica, 2011, 39(9): 2135–2141. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201109031.htm[12] 郑建军, 吕世芳. 相关Weibull分布雷达气象杂波模拟[J]. 微计算机信息, 2011, 27(9): 210–212. http://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ201109083.htmZheng Jian-jun and Lu Shi-fang. Modeling of correlated Weibull radar weather clutter[J]. Microcomputer Information, 2011, 27(9): 210–212. http://www.cnki.com.cn/Article/CJFDTOTAL-WJSJ201109083.htm[13] 武江涛. 雷达扩展目标跟踪算法研究[D]. 西安电子科技大学, 2014.Wu Jiang-tao. Research of radar extended target tracking[D]. Xidian University, 2014.[14] Wen C Y and Lee C H. Point spread functions and their applications to forensic image restoration[J]. Forensic Science Journal, 2002, 3(1): 1–16.[15] Boers Y and Driessen J N. A track before detect approach for extended objects[C]. 9th International Conference on Information Fusion, 2006.[16] Abraham D A, Gelb J M, and Oldag A W. Background and clutter mixture distributions for active sonar statistics[J]. IEEE Journal of Oceanic Engineering, 2011, 36(2): 231–247. doi: 10.1109/JOE.2010.2102150[17] Gilholm K and Salmond D. Spatial distribution model for tracking extended model for tracking extended objects[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5): 364–371. doi: 10.1049/ip-rsn:20045114[18] Boers Y, Driessen H, and Torstensson J. A track before detect algorithm for tracking extended targets[J]. IEE Procee-dings- Radar, Sonar and Navigation, 2006, 153(4): 345–351. doi: 10.1049/ip-rsn:20050123[19] 吴孙勇, 廖桂生, 杨志伟. 基于改进粒子滤波的微弱目标检测前跟踪算法[J]. 系统工程与电子技术, 2010, 32(9): 1875–1879. http://cdmd.cnki.com.cn/Article/CDMD-10614-1012472279.htmWu Sun-yong, Liao Gui-sheng, and Yang Zhi-wei. Improved track-before-detect algorithm for weak targets based on particle filter[J]. Systems Engineering and Electronics, 2006, 153(4): 345–351. http://cdmd.cnki.com.cn/Article/CDMD-10614-1012472279.htm -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


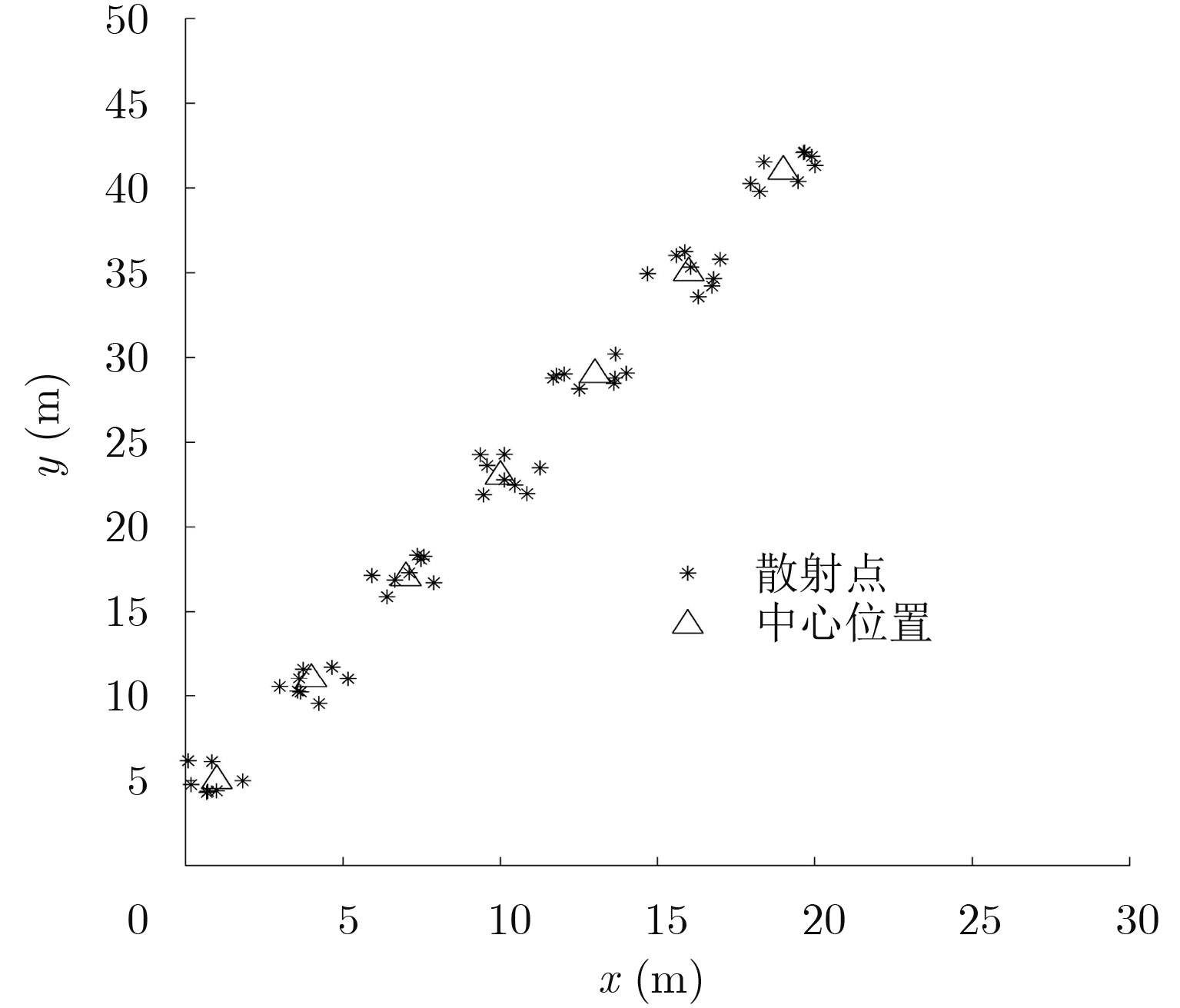
- Figure 1. Target scatter point
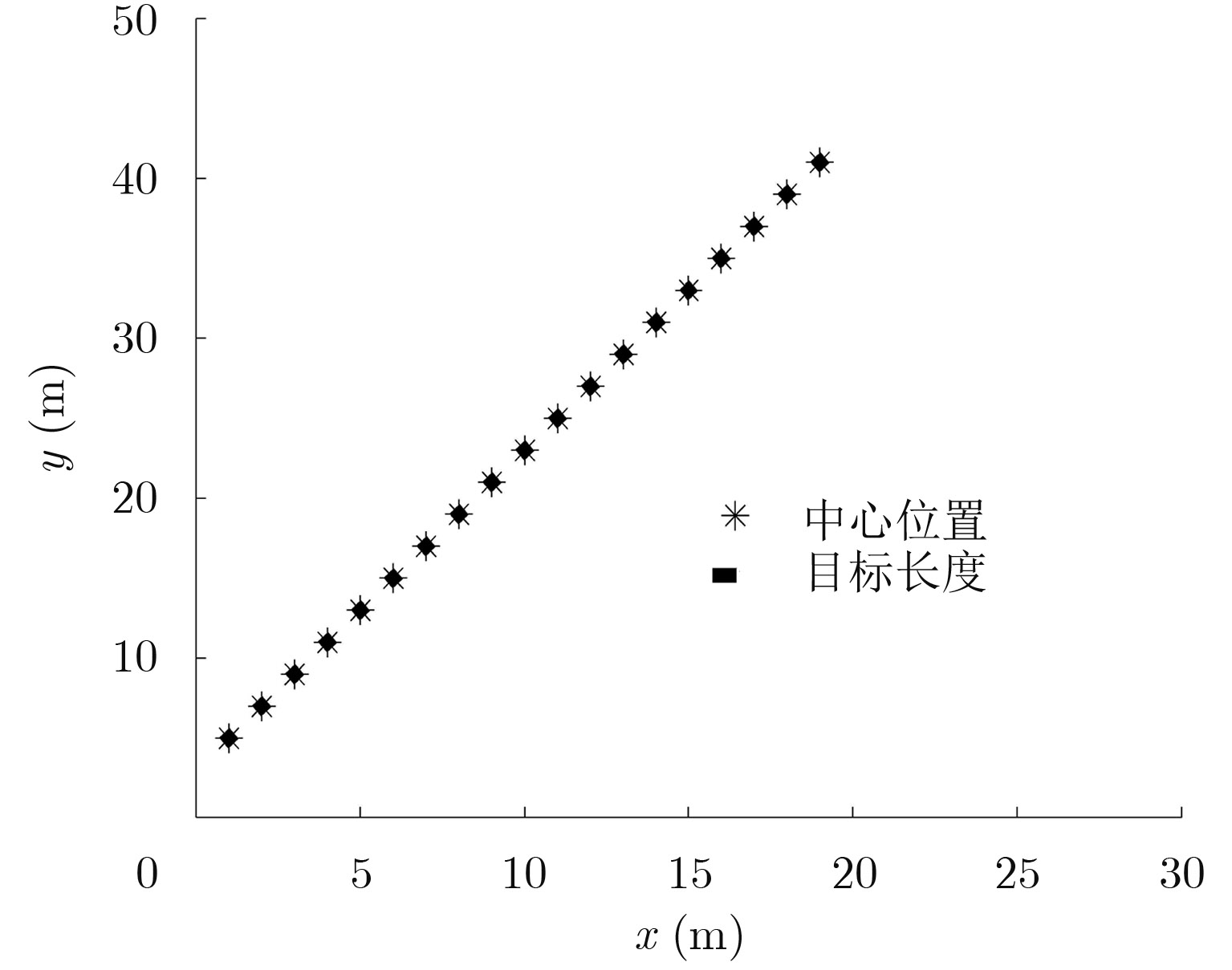
- Figure 2. Real track of extended target
- Figure 3. Average existence probability of target
- Figure 4. RMSE of target position
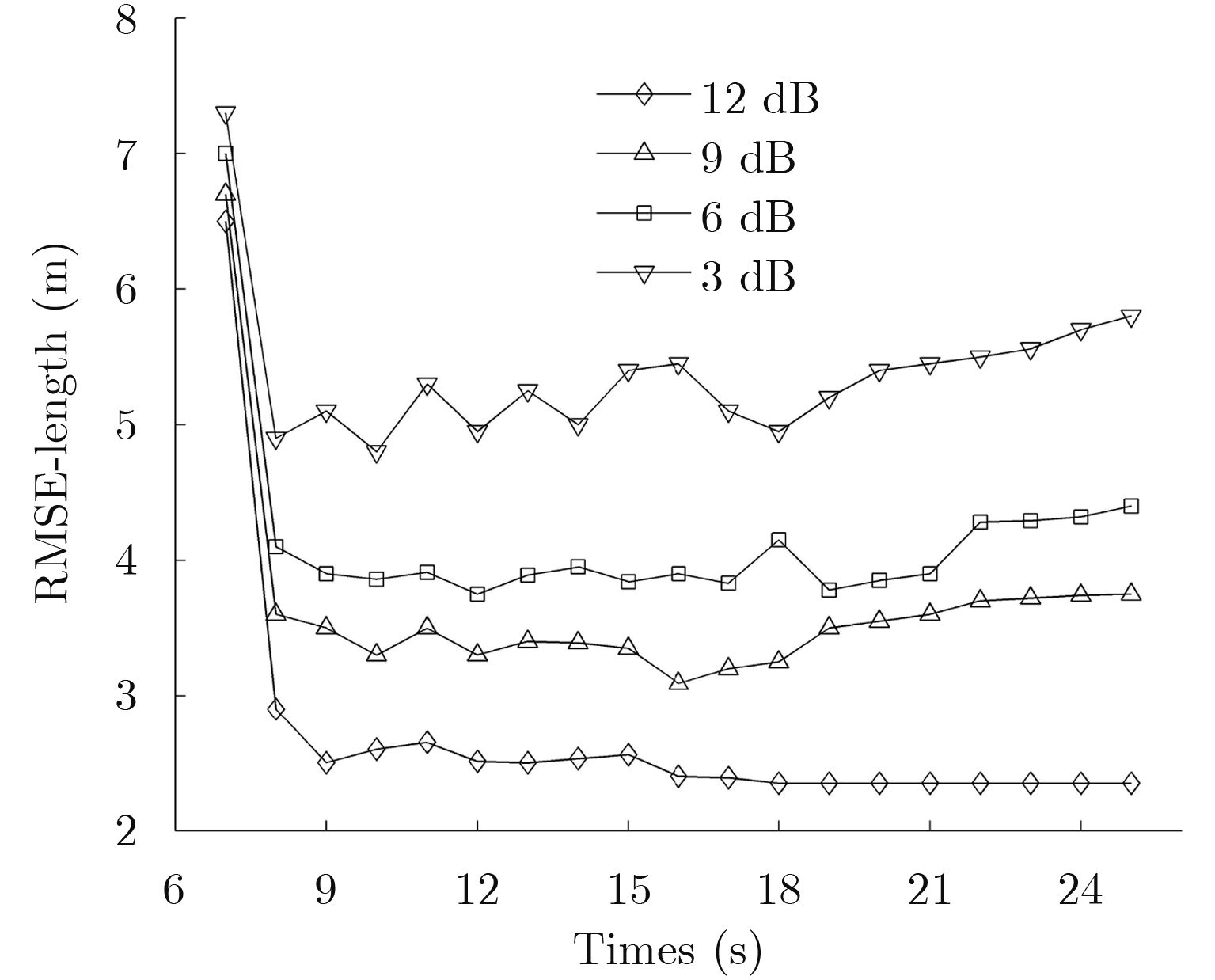
- Figure 5. RMSE of target length