
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | LI Zhongyu, PI Haozhuo, LI Jun’ao, et al. Clutter suppression technology based space-time adaptive ANM-ADMM-Net for bistatic SAR[J]. Journal of Radars, 2025, 14(5): 1196–1214. doi: 10.12000/JR24032

|
Clutter Suppression Technology Based Space-time Adaptive ANM-ADMM-Net for Bistatic SAR
DOI: 10.12000/JR24032 CSTR: 32380.14.JR24032
More Information-
Abstract
Bistatic Synthetic Aperture Radar (BiSAR) needs to suppress ground background clutter when detecting and imaging ground moving targets. However, due to the spatial configuration of BiSAR, the clutter poses a serious space-time nonstationary problem, which deteriorates the clutter suppression performance. Although Space-Time Adaptive Processing based on Sparse Recovery (SR-STAP) can reduce the nonstationary problem by reducing the number of samples, the off-grid dictionary problem will occur during processing, resulting in a decrease in the space-time spectrum estimation effect. Although most of the typical SR-STAP methods have clear mathematical relations and interpretability, they also have some problems, such as improper parameter setting and complicated operation in complex and changeable scenes. To solve the aforementioned problems, a complex neural network based on the Alternating Direction Method of Multiplier (ADMM), is proposed for BiSAR space-time adaptive clutter suppression. First, a sparse recovery model of the continuous clutter space-time domain of BiSAR is constructed based on the Atomic Norm Minimization (ANM) to overcome the off-grid problem associated with the traditional discrete dictionary model. Second, ADMM is used to rapidly and iteratively solve the BiSAR clutter spectral sparse recovery model. Third according to the iterative and data flow diagrams, the artificial hyperparameter iterative process is transformed into ANM-ADMM-Net. Then, the normalized root-mean-square-error network loss function is set up and the network model is trained with the obtained data set. Finally, the trained ANM-ADMM-Net architecture is used to quickly process BiSAR echo data, and the space-time spectrum of BiSAR clutter is accurately estimated and efficiently restrained. The effectiveness of this approach is validated through simulations and airborne BiSAR clutter suppression experiments. -

-
References
[1] ROBINSON P N. Synthetic array radar[J]. IEEE Potentials, 1997, 16(1): 8–11. doi: 10.1109/45.565604.[2] 杨建宇. 双基地合成孔径雷达技术[J]. 电子科技大学学报, 2016, 45(4): 482–501. doi: 10.3969/j.issn.1001-0548.2016.04.001.YANG Jianyu. Bistatic synthetic aperture radar technology[J]. Journal of University of Electronic Science and Technology of China, 2016, 45(4): 482–501. doi: 10.3969/j.issn.1001-0548.2016.04.001.[3] WILDEN H and BRENNER A R. The SAR/GMTI airborne radar PAMIR: Technology and performance[C]. IEEE MTT-S International Microwave Symposium, Anaheim, USA, 2010: 534–537. doi: 10.1109/MWSYM.2010.5518080.[4] LI Zhongyu, WU Junjie, HUANG Yulin, et al. Ground-moving target imaging and velocity estimation based on mismatched compression for bistatic forward-looking SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(6): 3277–3291. doi: 10.1109/TGRS.2016.2514494.[5] LI Junao, LI Zhongyu, YANG Qing, et al. Joint clutter suppression and moving target indication in 2-D azimuth rotated time domain for single-channel bistatic SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5202516. doi: 10.1109/TGRS.2023.3237553.[6] LI Zhongyu, WU Junjie, YANG Jianyu, et al. Bistatic SAR Clutter Suppression[M]. Singapore: Springer, 2022: 8–19. doi: 10.1007/978-981-19-0159-1.[7] 李中余. 双基地合成孔径雷达动目标检测与成像技术研究[D]. [博士论文], 电子科技大学, 2017: 11–59.LI Zhongyu. Research on bistatic SAR moving target detection and imaging technology[D]. [Ph.D. dissertation], University of Electronic Science and Technology of China, 2017: 11–59.[8] CHEN H C and MCGILLEM C D. Target motion compensation by spectrum shifting in synthetic aperture radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(3): 895–901. doi: 10.1109/7.256313.[9] FIENUP J R. Detecting moving targets in SAR imagery by focusing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(3): 794–809. doi: 10.1109/7.953237.[10] MOREIRA J R and KEYDEL W. A new MTI-SAR approach using the reflectivity displacement method[J]. IEEE Transactions on Geoscience and Remote Sensing, 1995, 33(5): 1238–1244. doi: 10.1109/36.469488.[11] LIGHTSTONE L, FAUBERT D, and REMPEL G. Multiple phase centre DPCA for airborne radar[C]. IEEE National Radar Conference, Los Angeles, USA, 1991: 36–40. doi: 10.1109/NRC.1991.114720.[12] LI Zhongyu, LI Shanchuan, LIU Zhutian, et al. Bistatic forward-looking SAR MP-DPCA method for space-time extension clutter suppression[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(9): 6565–6579. doi: 10.1109/TGRS.2020.2977982.[13] 谢文冲, 段克清, 王永良. 机载雷达空时自适应处理技术研究综述[J]. 雷达学报, 2017, 6(6): 575–586. doi: 10.12000/JR17073.XIE Wenchong, DUAN Keqing, and WANG Yongliang. Space time adaptive processing technique for airborne radar: An overview of its development and prospects[J]. Journal of Radars, 2017, 6(6): 575–586. doi: 10.12000/JR17073.[14] REED I S, MALLETT J D, and BRENNAN L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974, AES-10(6): 853–863. doi: 10.1109/TAES.1974.307893.[15] KLEMM R. Comparison between monostatic and bistatic antenna configurations for STAP[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 596–608. doi: 10.1109/7.845248.[16] LIU Zhutian, YU Huaiqin, LI Zhongyu, et al. Non-stationary clutter suppression approach based on cascading cancellation for bistatic forward-looking SAR[C]. 2019 IEEE Radar Conference, Boston, USA, 2019: 1–5. doi: 10.1109/RADAR.2019.8835707.[17] LI Junao, LI Zhongyu, YANG Qing, et al. Efficient matrix sparse recovery STAP method based on Kronecker transform for BiSAR sea clutter suppression[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5103218. doi: 10.1109/TGRS.2024.3362844.[18] 马泽强, 王希勤, 刘一民, 等. 基于稀疏恢复的空时二维自适应处理技术研究现状[J]. 雷达学报, 2014, 3(2): 217–228. doi: 10.3724/SP.J.1300.2014.14002.MA Zeqiang, WANG Xiqin, LIU Yimin, et al. An overview on sparse recovery-based STAP[J]. Journal of Radars, 2014, 3(2): 217–228. doi: 10.3724/SP.J.1300.2014.14002.[19] SUN Ke, ZHANG Hao, LI Gang, et al. A novel STAP algorithm using sparse recovery technique[C]. 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 2009: V-336–V-339. doi: 10.1109/IGARSS.2009.5417664.[20] TANG Gongguo, BHASKAR B N, SHAH P, et al. Compressed sensing off the grid[J]. IEEE Transactions on Information Theory, 2013, 59(11): 7465–7490. doi: 10.1109/TIT.2013.2277451.[21] YE Hongda, LI Zhongyu, LIU Zhutian, et al. Clutter-ridge matched SR-STAP technique for non-stationary clutter suppression[C]. 2020 IEEE Radar Conference, Florence, Italy, 2020: 1–4. doi: 10.1109/RadarConf2043947.2020.9266628.[22] DUAN Keqing, LIU Weijian, DUAN Guangqing, et al. Off-grid effects mitigation exploiting knowledge of the clutter ridge for sparse recovery STAP[J]. IET Radar, Sonar & Navigation, 2018, 12(5): 557–564. doi: 10.1049/iet-rsn.2017.0425.[23] LI Zhihui, ZHANG Yongshun, GE Qichao, et al. Off-grid STAP algorithm based on reduced-dimension local search orthogonal matching pursuit[C]. 2019 IEEE 4th International Conference on Signal and Image Processing, Wuxi, China, 2019: 187–191. doi: 10.1109/SIPROCESS.2019.8868509.[24] 段克清, 王泽涛, 谢文冲, 等. 一种基于联合稀疏恢复的空时自适应处理方法[J]. 雷达学报, 2014, 3(2): 229–234. doi: 10.3724/SP.J.1300.2014.13149.DUAN Keqing, WANG Zetao, XIE Wenchong, et al. A space-time adaptive processing algorithm based on joint sparse recovery[J]. Journal of Radars, 2014, 3(2): 229–234. doi: 10.3724/SP.J.1300.2014.13149.[25] HE Pengyuan, HE Shun, YANG Zhiwei, et al. An off-grid STAP algorithm based on local mesh splitting with bistatic radar system[J]. IEEE Signal Processing Letters, 2020, 27: 1355–1359. doi: 10.1109/LSP.2020.3010161.[26] LI Zhongyu, YE Hongda, LIU Zhutian, et al. Bistatic SAR clutter-ridge matched STAP method for nonstationary clutter suppression[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5216914. doi: 10.1109/TGRS.2021.3125043.[27] FENG Weike, GUO Yiduo, ZHANG Yongshun, et al. Airborne radar space time adaptive processing based on atomic norm minimization[J]. Signal Processing, 2018, 148: 31–40. doi: 10.1016/j.sigpro.2018.02.008.[28] LI Zhongyue and WANG Tong. ADMM-based low-complexity off-grid space-time adaptive processing methods[J]. IEEE Access, 2020, 8: 206646–206658. doi: 10.1109/ACCESS.2020.3037652.[29] ZOU Bo, WANG Xin, FENG Weike, et al. DU-CG-STAP method based on sparse recovery and unsupervised learning for airborne radar clutter suppression[J]. Remote Sensing, 2022, 14(14): 3472. doi: 10.3390/rs14143472.[30] SU Hanning, BAO Qinglong, and CHEN Zengping. ADMM-net: A deep learning approach for parameter estimation of chirp signals under sub-nyquist sampling[J]. IEEE Access, 2020, 8: 75714–75727. doi: 10.1109/ACCESS.2020.2989507.[31] RICHARDS M A. The keystone transformation for correcting range migration in range-doppler processing[J]. Pulse, 2014, 1000(1).[32] LIU Zhutian, LI Zhongyu, YU Huaiqin, et al. Bistatic forward-looking SAR moving target detection method based on joint clutter cancellation in echo-image domain with three receiving channels[J]. Sensors, 2018, 18(11): 3835. doi: 10.3390/s18113835. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

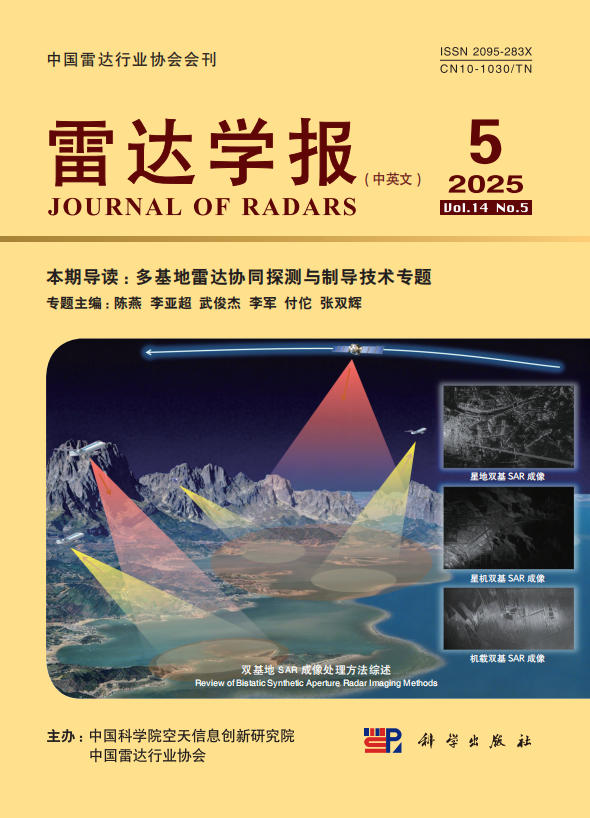
- Figure 1. Geometry configuration of Bistatic SAR
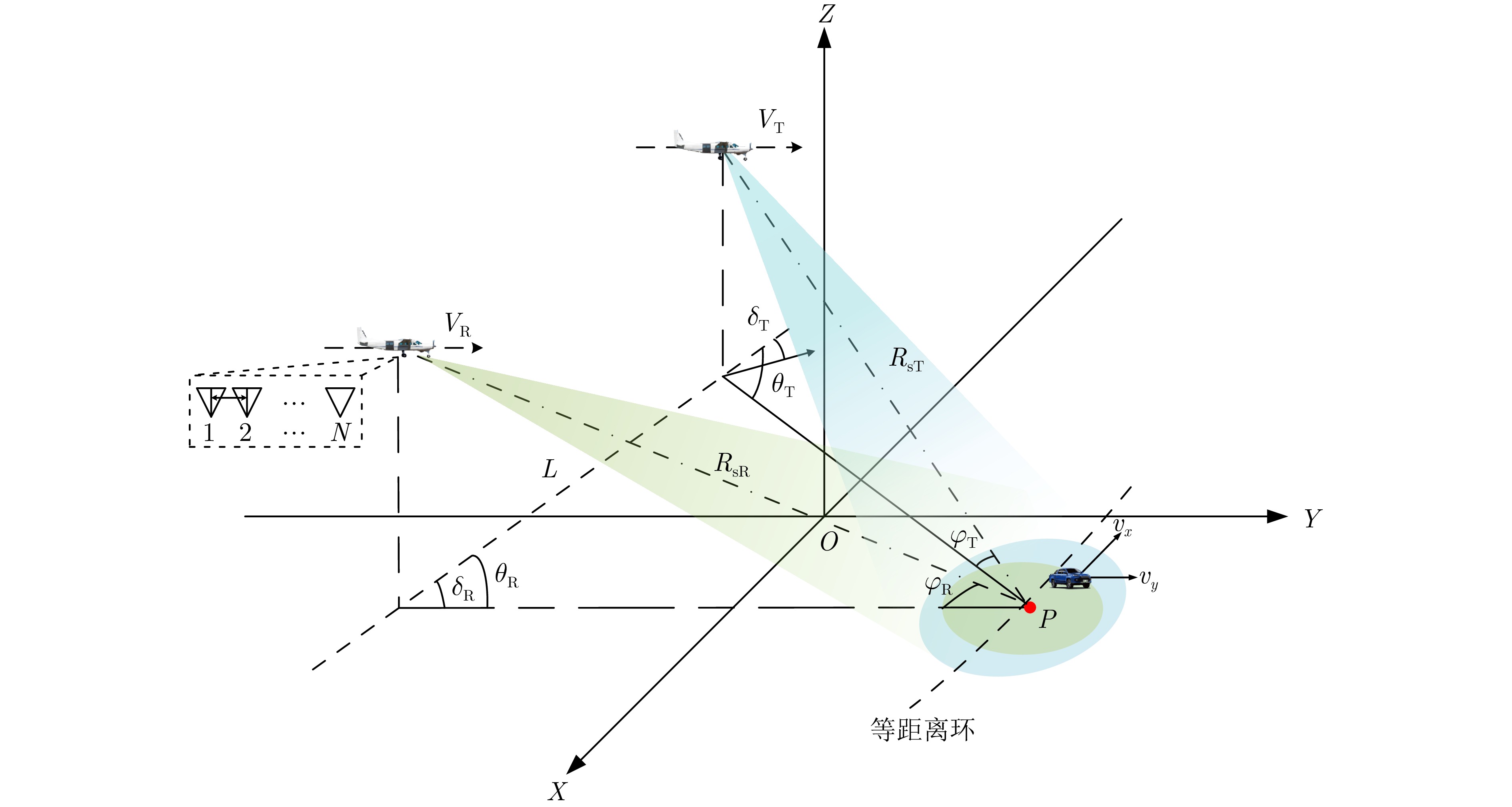
- Figure 2. Comparison of clutter characteristics in monostatic/bistatic SAR
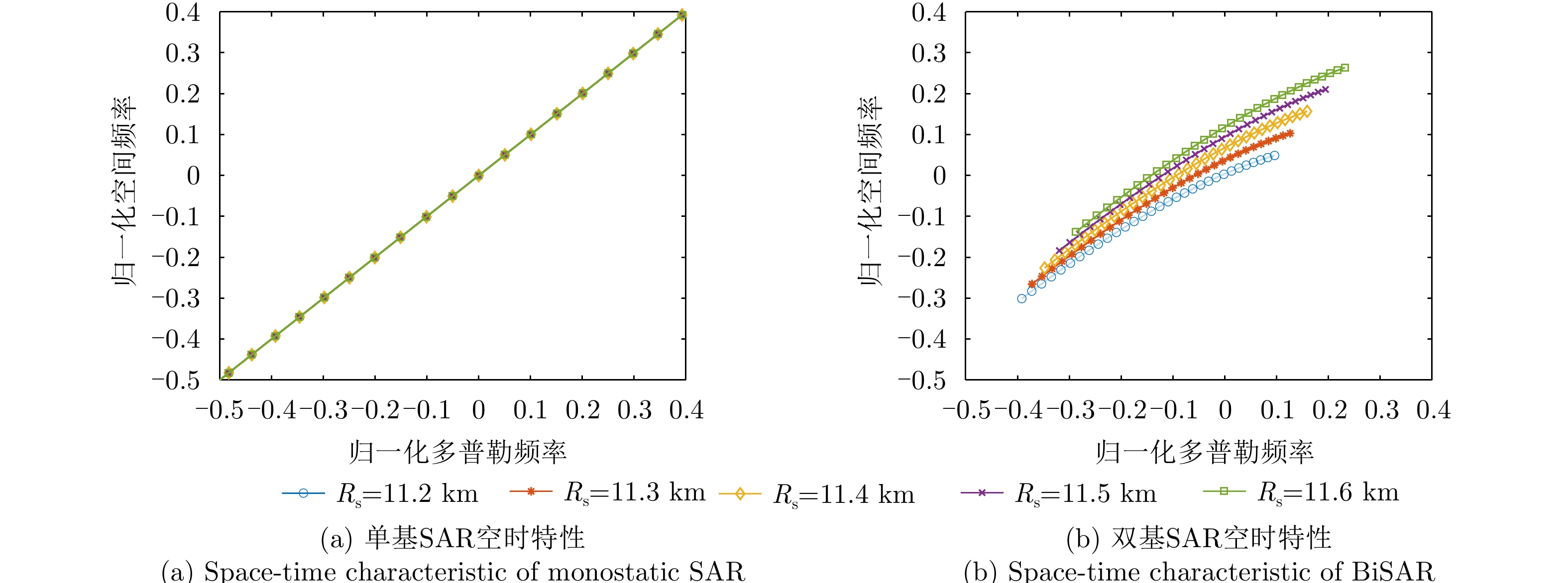
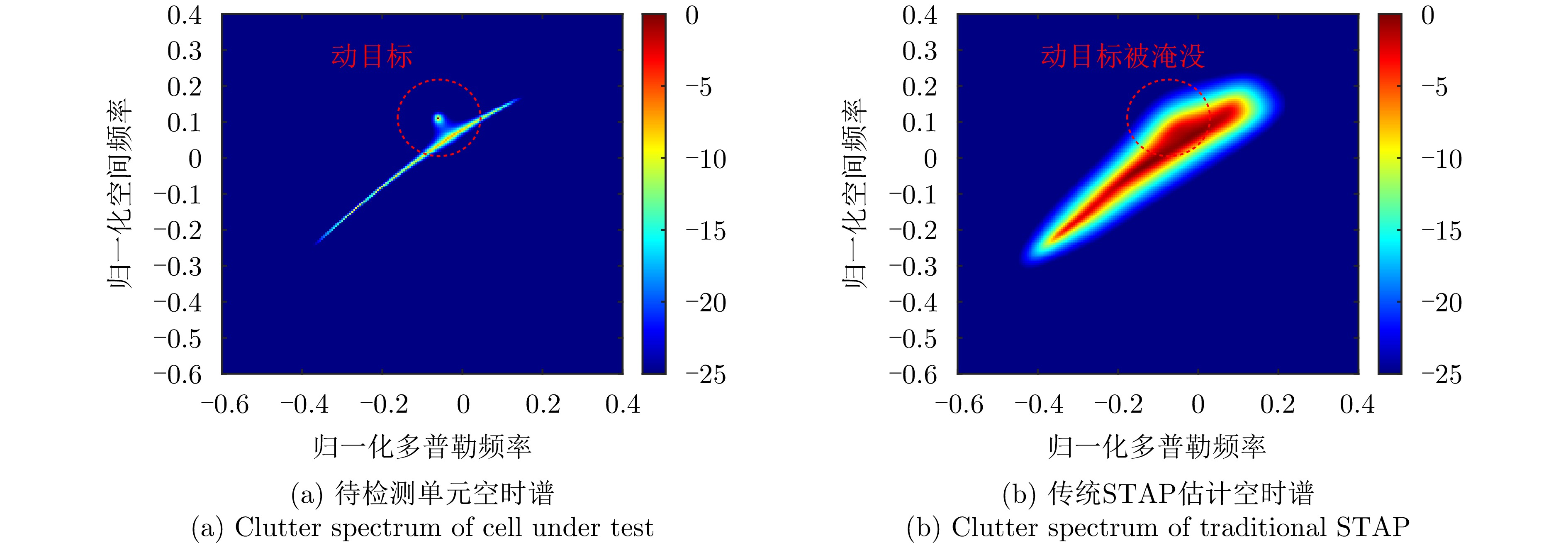
- Figure 3. Bistatic SAR space-time clutter power spectrum
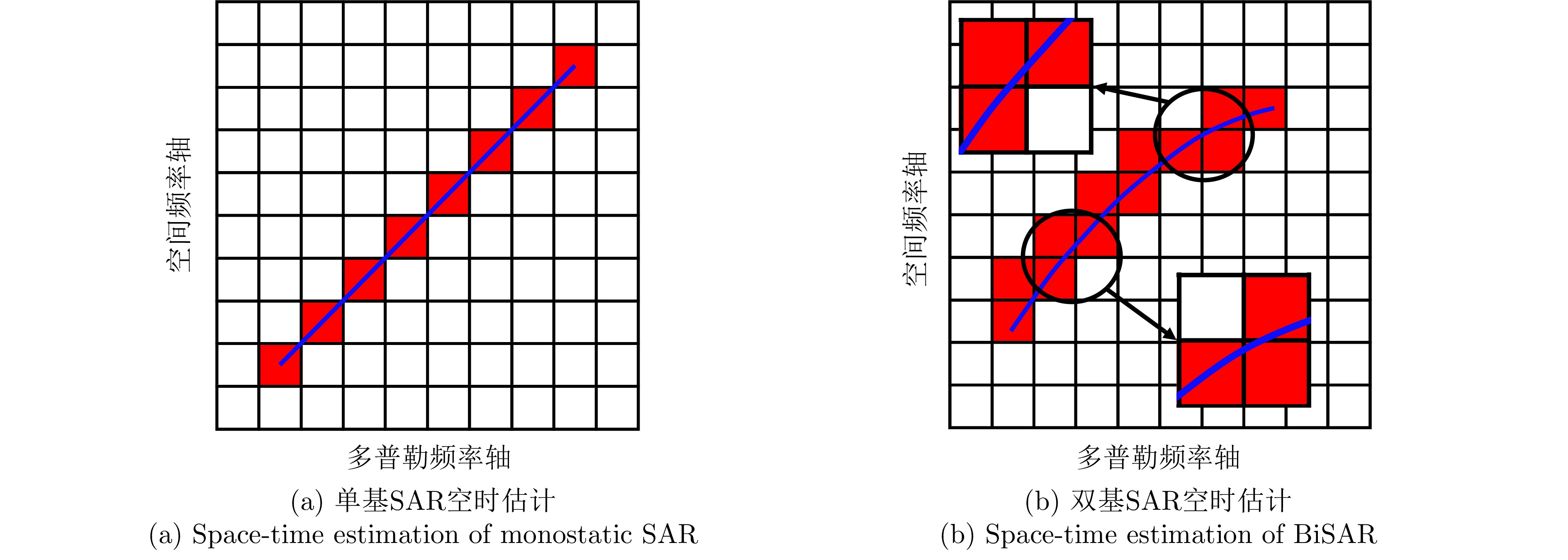
- Figure 4. Discrete space-time time domain estimation
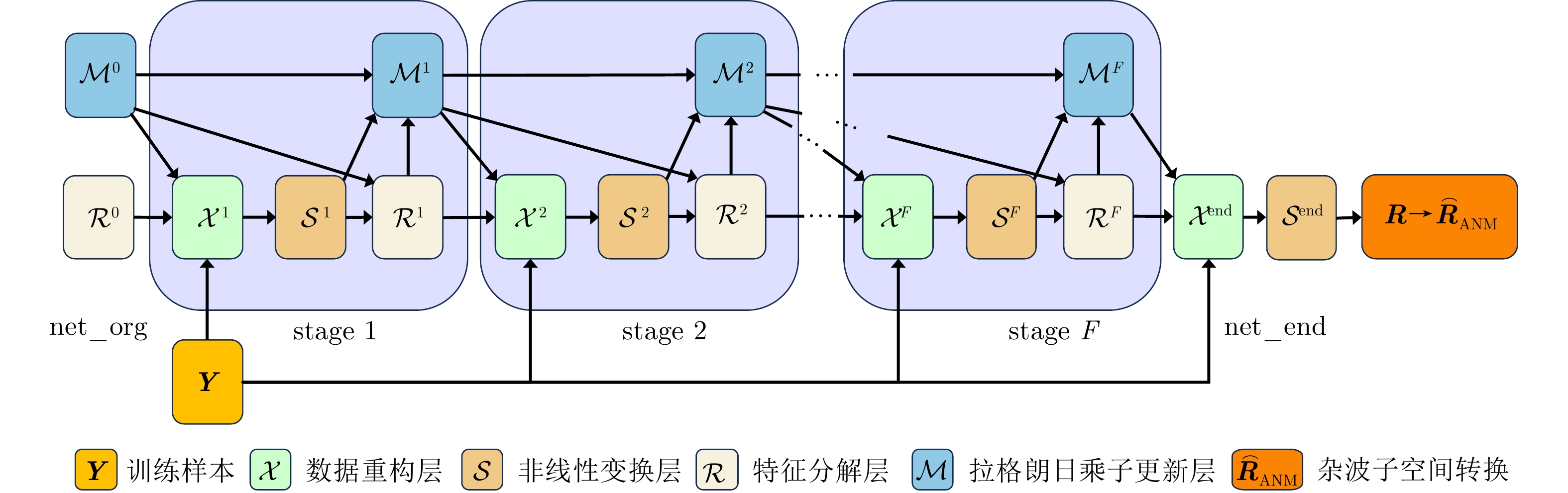
- Figure 5. Data flow graph of ANM-ADMM-Net
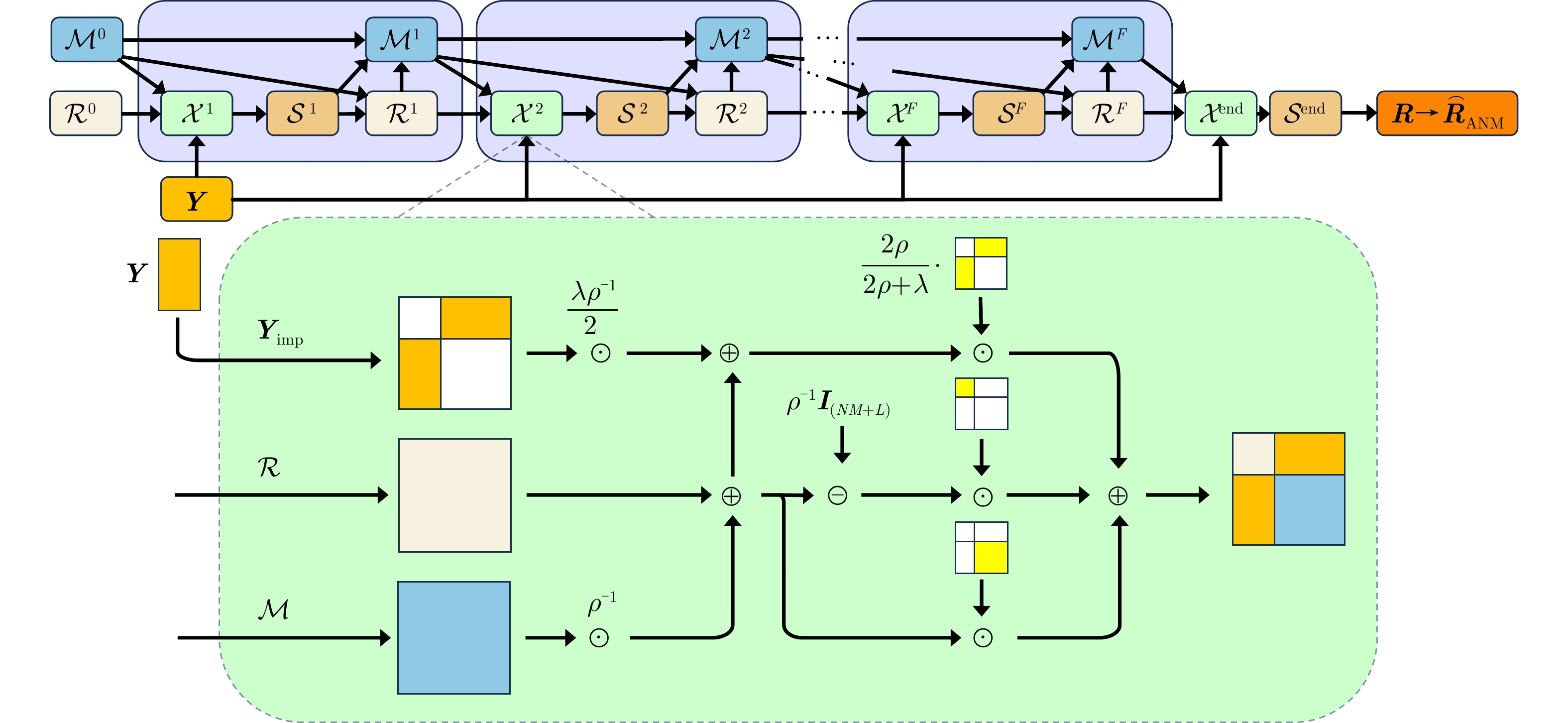
- Figure 6. Data reconstruction layer
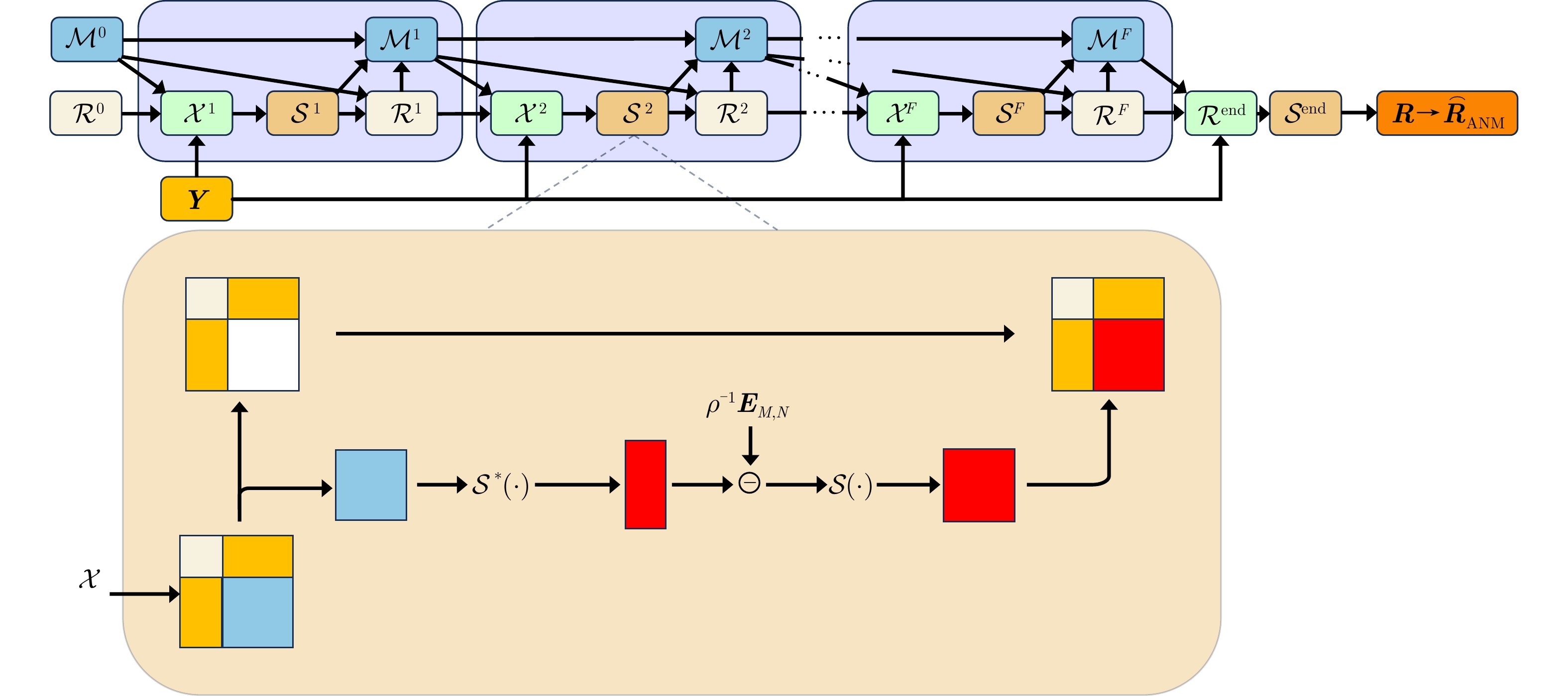
- Figure 7. Nonlinear transform layer
- Figure 8. Training sample selection
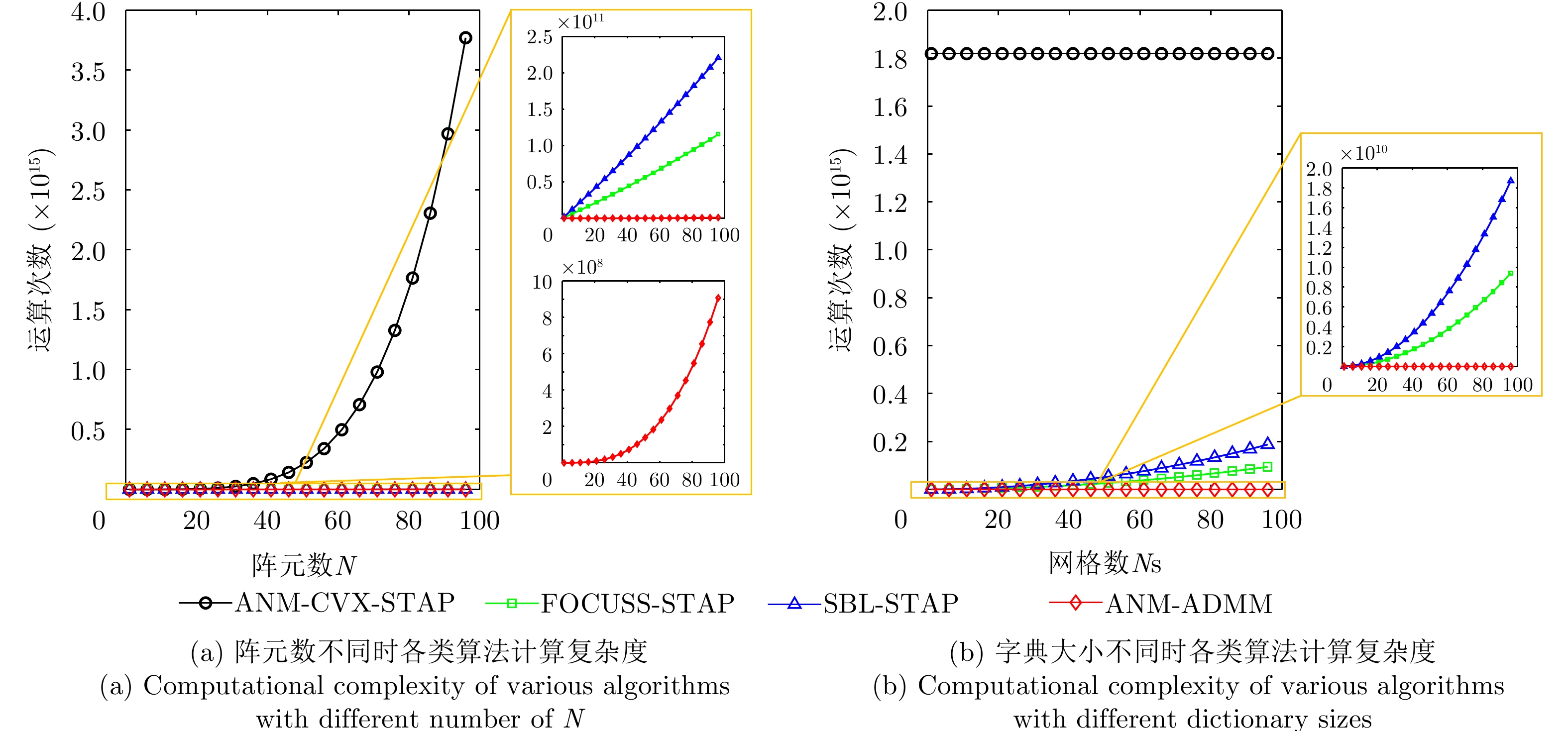
- Figure 9. Computational complexity analysis
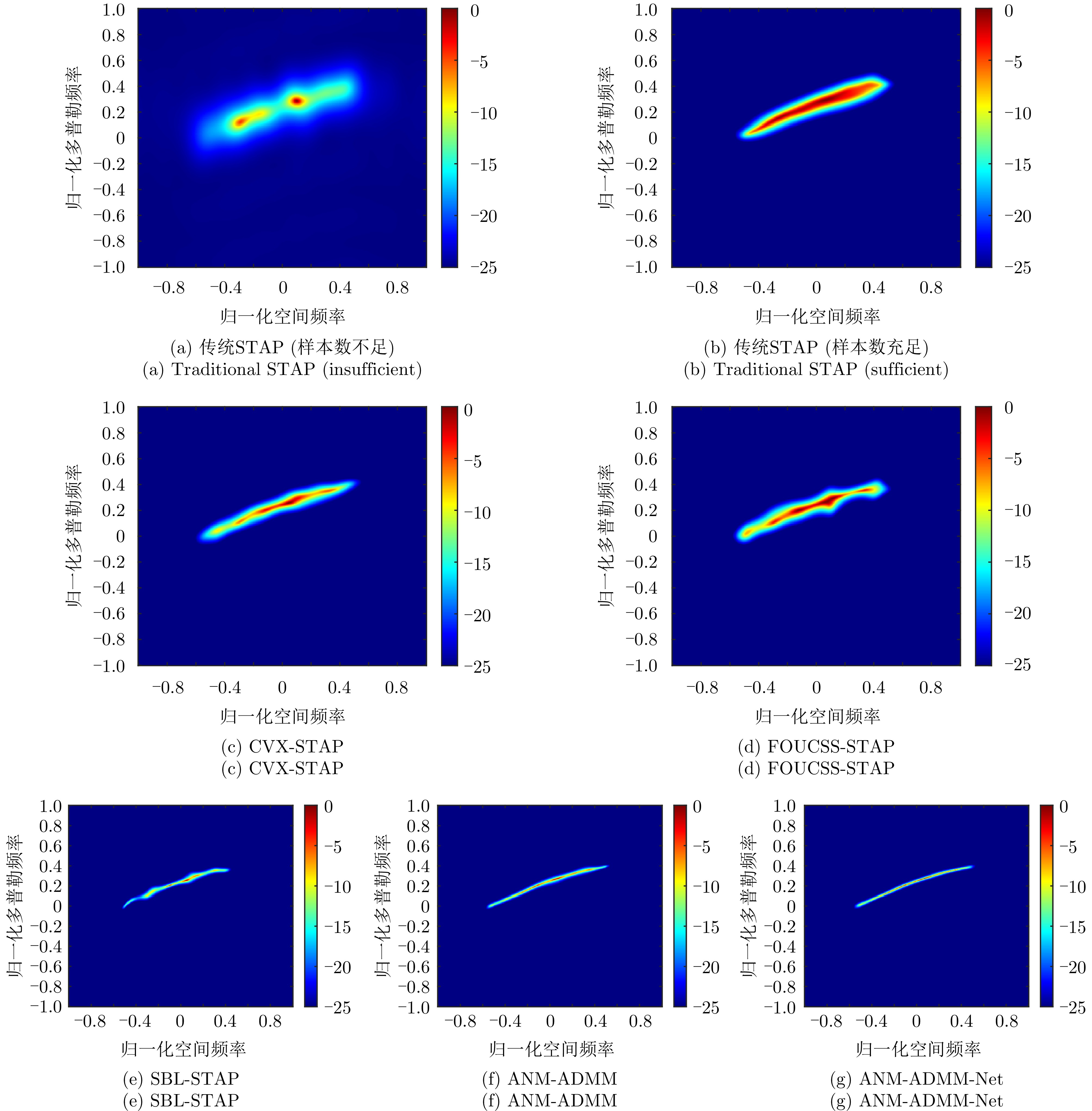
- Figure 10. Monostatic/Bistatic SAR space-time clutter power spectrum
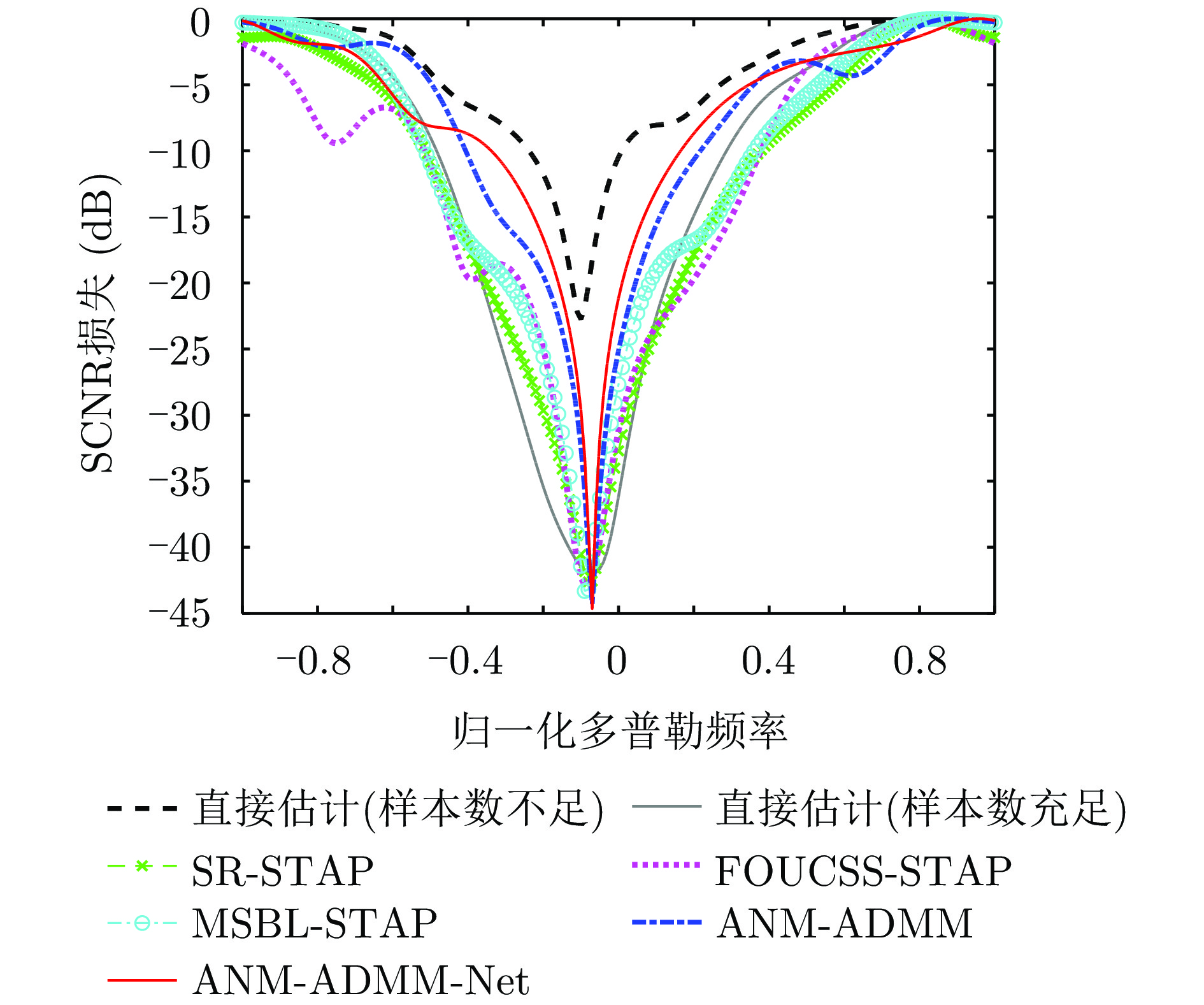
- Figure 11. comparison of SCNR loss of different algorithms
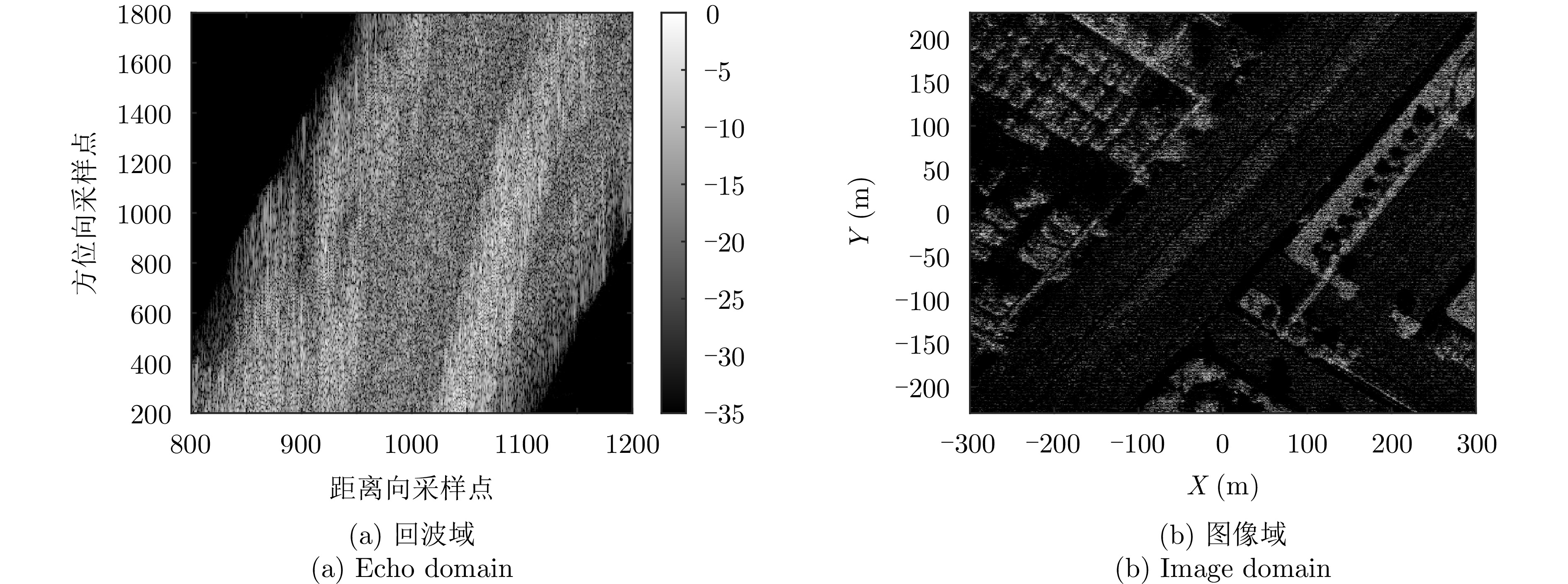
- Figure 12. Data results before clutter suppression
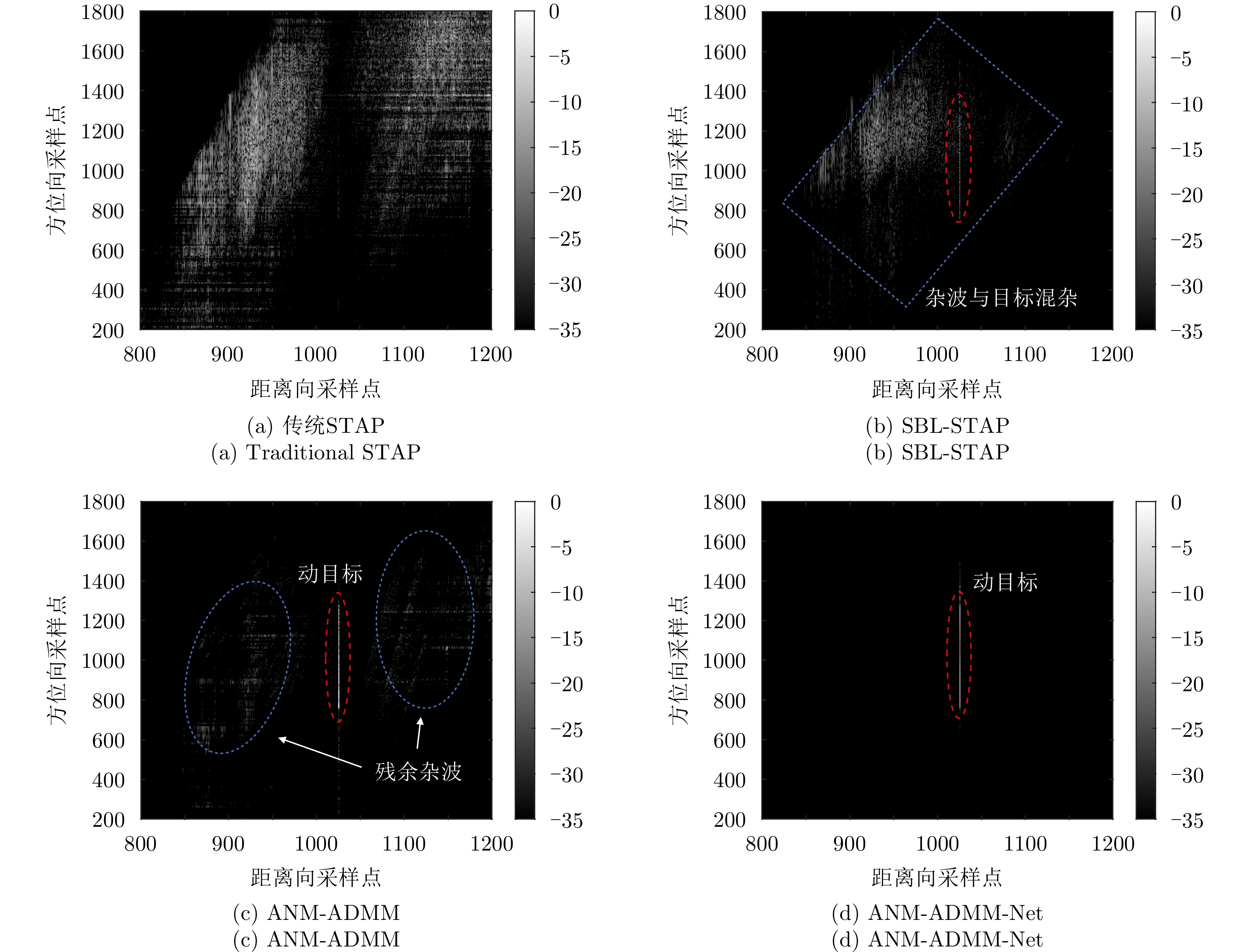
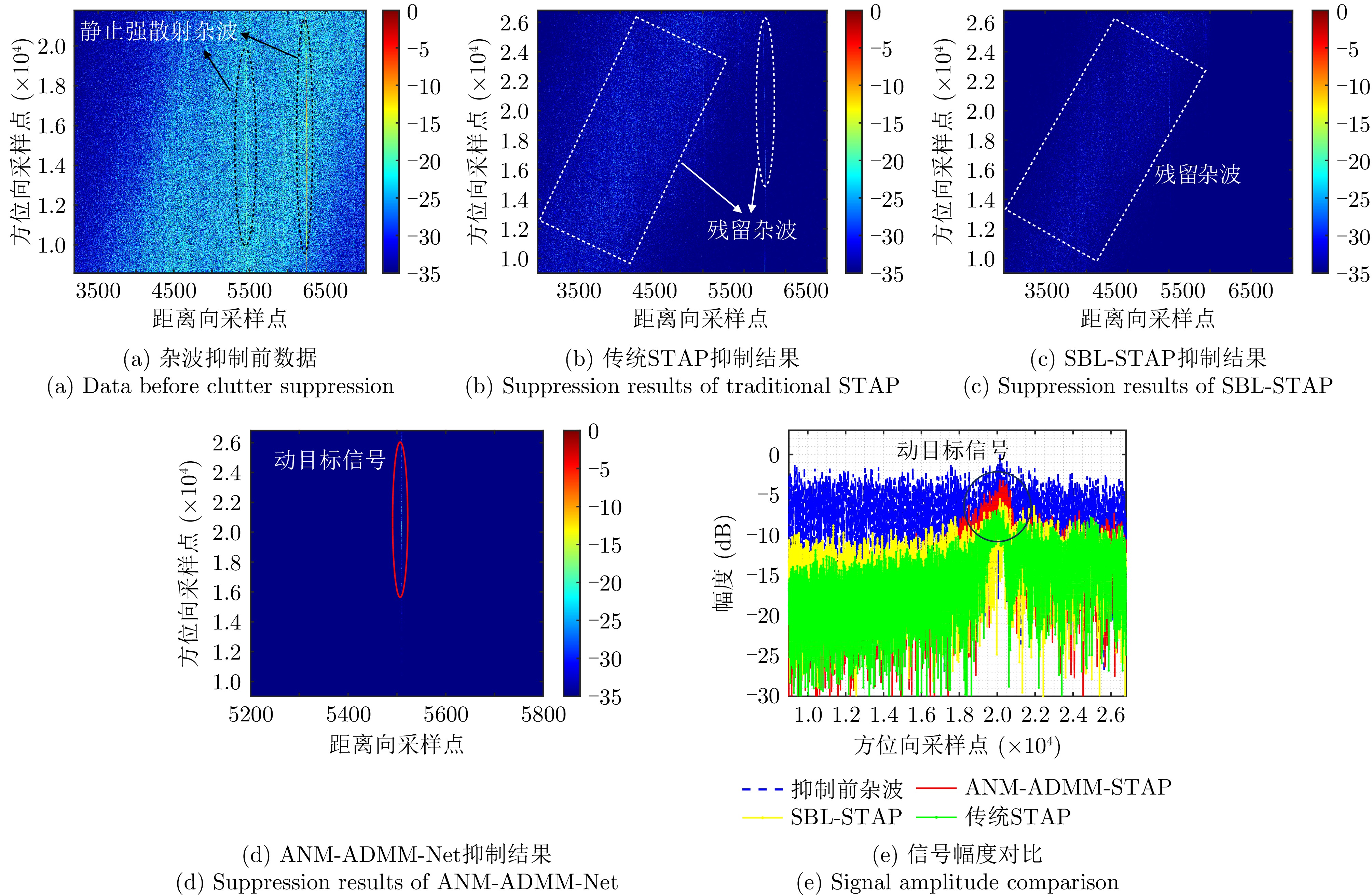
- Figure 13. Clutter suppression results in echo domain
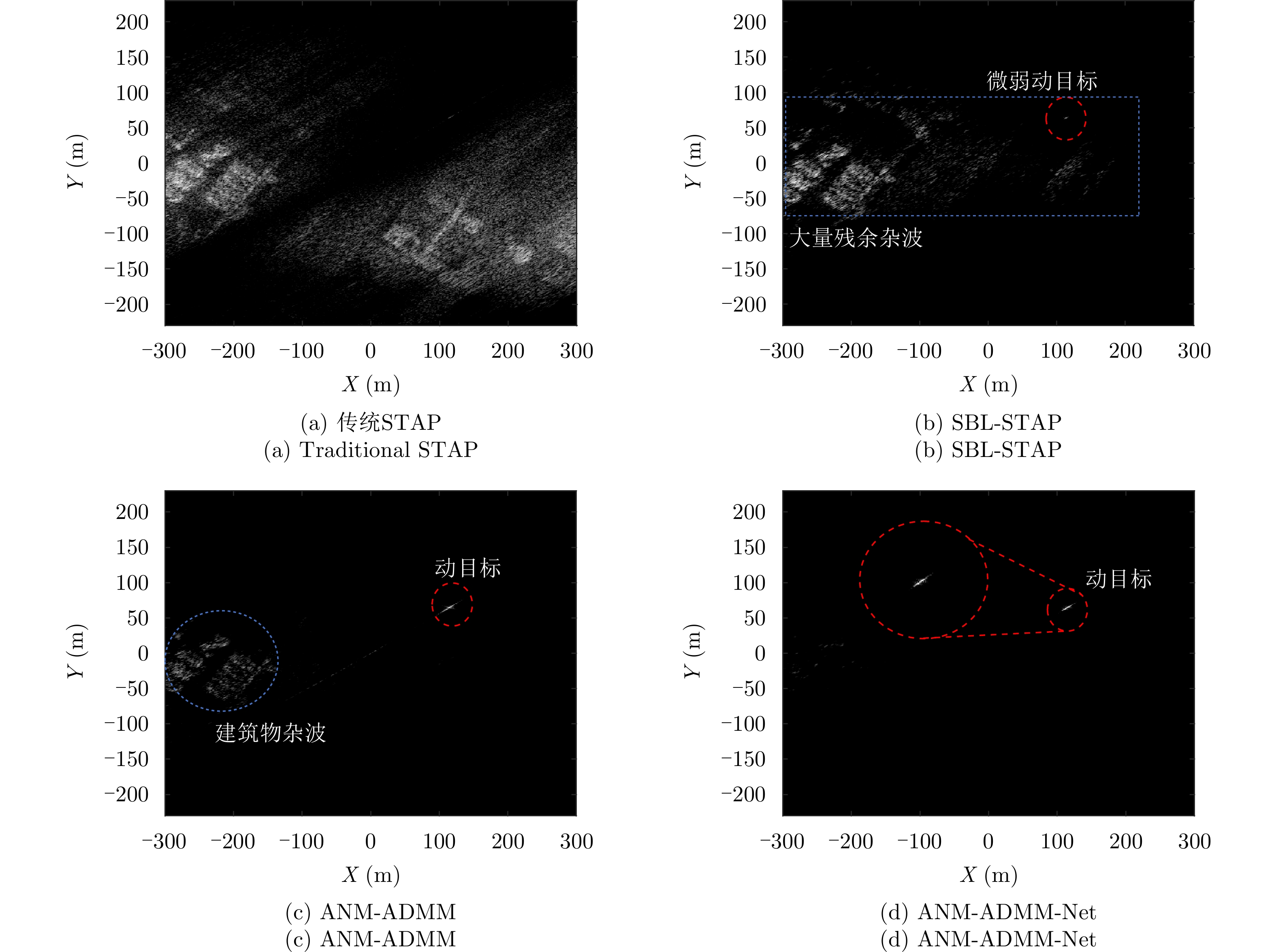
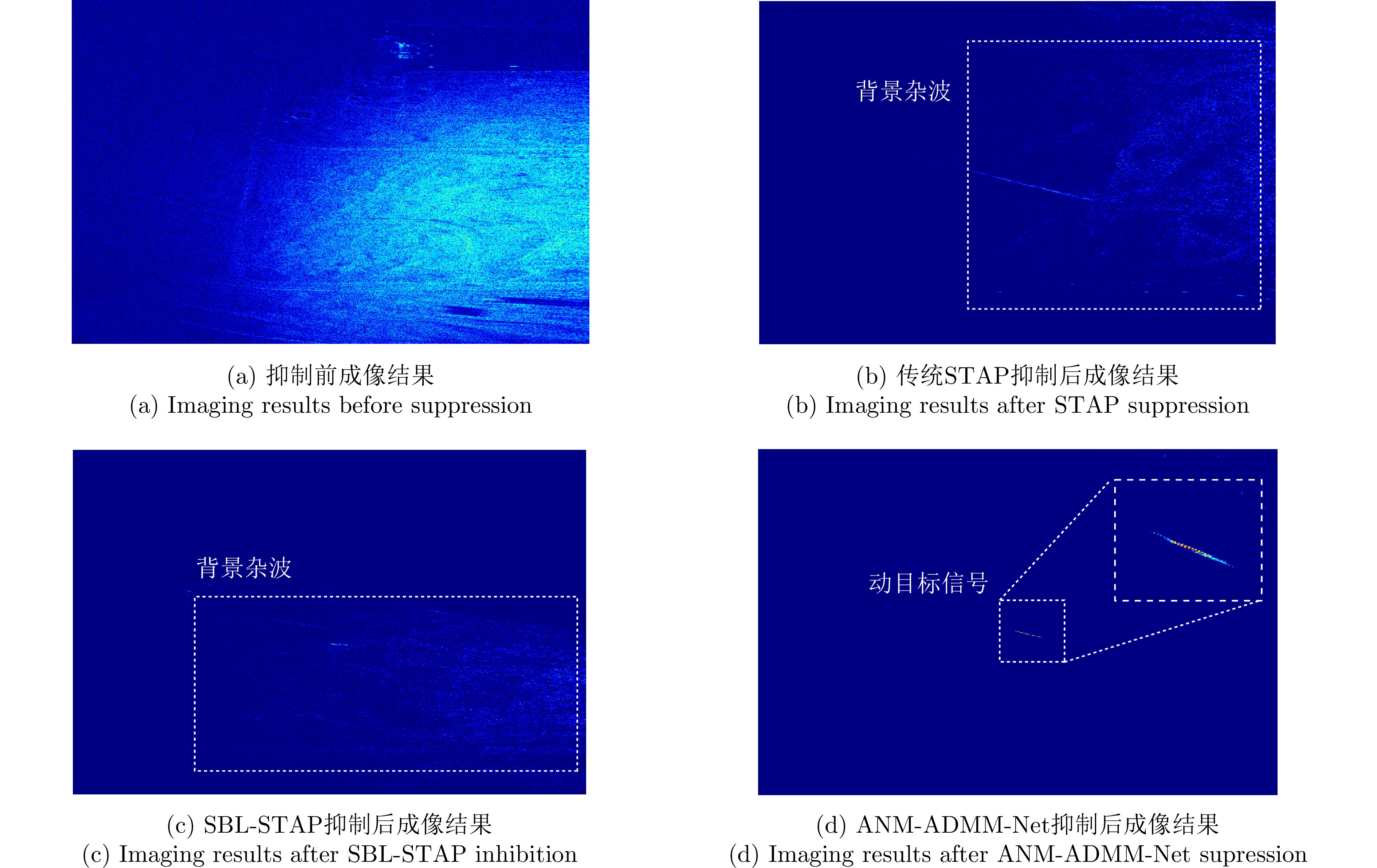
- Figure 14. Clutter suppression results in image domain
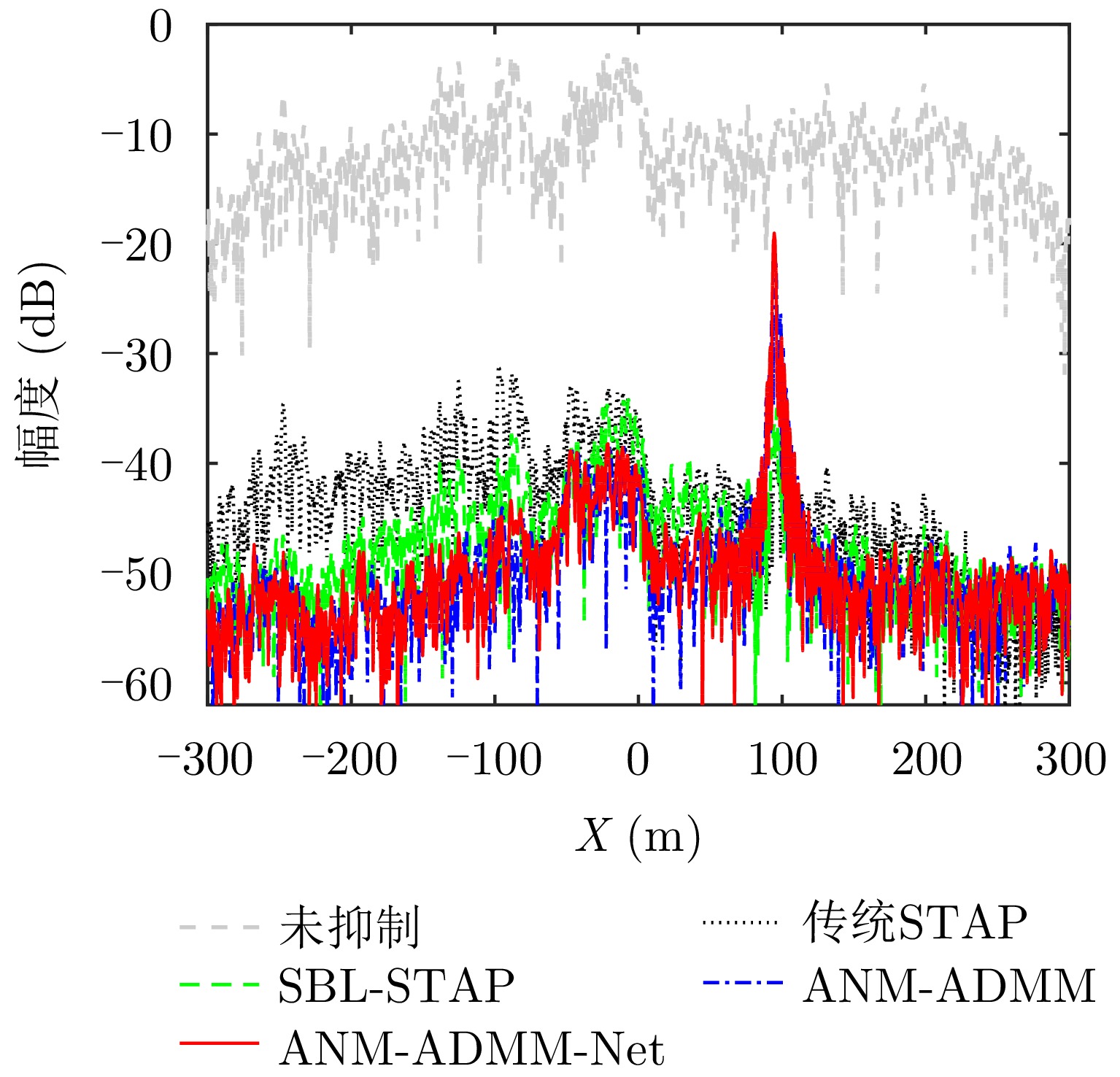
- Figure 15. Results of suppression by different methods
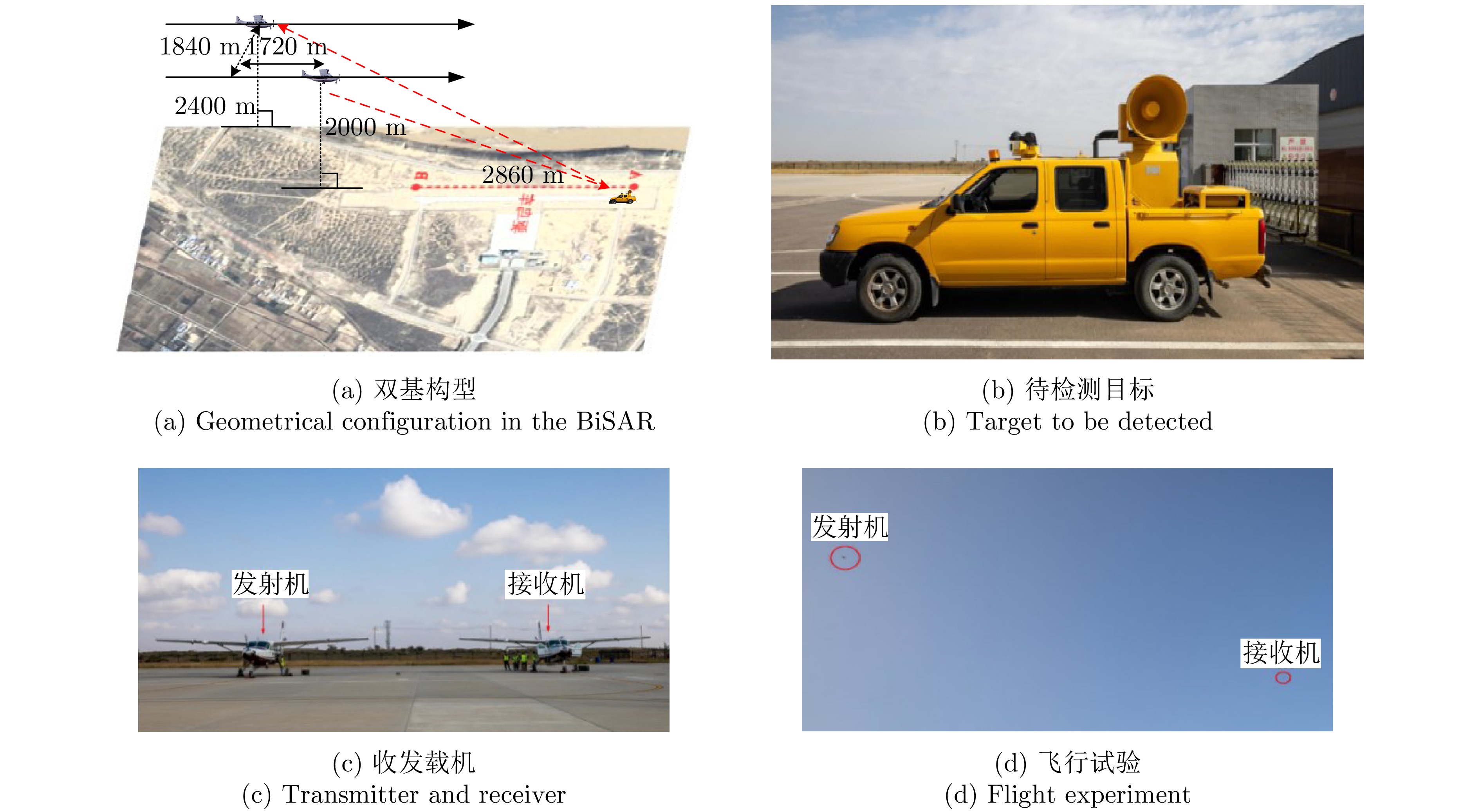
- Figure 16. Airborne forward looking BiSAR flight diagram
- Figure 17. Airborne forward looking BiSAR flight diagram
- Figure 18. Clutter suppression results in image domain