
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | WEI Ning, LI Minglei, CHEN Guangyong, et al. Research on aircraft docking guidance localization based on LiDAR point cloud completion[J]. Journal of Radars, 2025, 14(3): 641–650. doi: 10.12000/JR25002

|
Research on Aircraft Docking Guidance Localization Based on LiDAR Point Cloud Completion
DOI: 10.12000/JR25002 CSTR: 32380.14.JR25002
More Information-
Abstract
The airport docking guidance system is essential for enhancing airport safety and operational efficiency. This study introduces a deep learning-based point cloud completion network designed for accurate aircraft localization using LiDAR technology. Initially, the aircraft parking process is simulated in a realistic virtual environment to generate complete point cloud data. Subsequently, partial point clouds caused by occlusions or sensor limitations are processed through the proposed network to reconstruct their complete geometric structures. Then the restored point cloud is aligned with a predefined aircraft model, enabling precise calculation of the aircraft’s center coordinates in the simulated coordinate system through spatial transformation. Experimental results demonstrate that the network effectively recovers structural details from incomplete point clouds, enabling accurate computation of aircraft centroid coordinates. This approach achieves high-precision position detection for aircraft during docking, showing significant potential for practical airport applications. The codes are available at: https://www.scidb.cn/anonymous/UXZFZkFm. -

-
References
[1] 韩万鹏, 蒙文, 李云霞, 等. 机场泊位引导系统的发展现状及关键技术分析[J]. 激光与红外, 2012, 42(3): 244–249. doi: 10.3969/j.issn.1001-5078.2012.03.002.HAN Wanpeng, MENG Wen, LI Yunxia, et al. Development status and key technical analysis of airport docking guide system[J]. Laser & Infrared, 2012, 42(3): 244–249. doi: 10.3969/j.issn.1001-5078.2012.03.002.[2] 任宁, 徐乃付. 泊位引导系统与A-SMGCS系统运行方式探究[C] 中国计算机用户协会网络应用分会2021年第二十五届网络新技术与应用年会论文集, 北京. 2021: 4. doi: 10.26914/c.cnkihy.2021.047813.REN Ning and XU Naifu. Study of operation mode of visual docking guidance system and A-SMGCS[C]. The 25th Annual Conference on Network New Technologies and Applications of the China Computer User Association Network Application Branch (p. 4), Beijing, China, 2021: 4. doi: 10.26914/c.cnkihy.2021.047813.[3] 张积洪, 李兴旺. 双目激光泊位引导系统[J]. 机械设计, 2015, 32(11): 88–91. doi: 10.13841/j.cnki.jxsj.2015.11.018.ZHANG Jihong and LI Xingwang. Binocular laser docking guidance system[J]. Machine Design, 2015, 32(11): 88–91. doi: 10.13841/j.cnki.jxsj.2015.11.018.[4] 魏红波. 组合精密进近着陆技术研究[J]. 现代导航, 2017, 8(01): 5–8. doi: 10.3969/j.issn.1674-7976.2017.01.002.WEI Hongbo. Technology research on integrated precise approach and landing[J]. Modern Navigation, 2017, 8(01): 5–8. doi: 10.3969/j.issn.1674-7976.2017.01.002.[5] 南晓虎, 丁雷. 深度学习的典型目标检测算法综述[J]. 计算机应用研究, 2020, 37(S2): 15–21.NAN Xiaohu and DING Lei. Review of typical target detection algorithms for deep learning[J]. Application Research of Computers, 2020, 37(S2): 15–21.[6] MITRA N J, PAULY M, WAND M, et al. Symmetry in 3D geometry: Extraction and applications[J]. Computer Graphics Forum, 2013, 32(6): 1–23. doi: 10.1111/cgf.12010.[7] SARKAR K, VARANASI K, STRICKER D. Learning quadrangulated patches for 3D shape parameterization and completion[C]. 2017 International Conference on 3D Vision (3DV), Qingdao, China, 2017: 383–392. doi: 10.1109/3DV.2017.00051.[8] SUNG M, KIM V G, ANGST R, et al. Data-driven structural priors for shape completion[J]. ACM Transactions on Graphics, 2015, 34(6): 175. doi: 10.1145/2816795.2818094.[9] QI C R, SU H, MO K, et al. Pointnet: Deep learning on point sets for 3d classification and segmentation[C]. The IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 2017: 652–660. doi: 10.1109/CVPR.2017.16.[10] QI C R, YI L, SU H, et al. Pointnet++: Deep hierarchical feature learning on point sets in a metric space[J]. Advances in neural information processing systems, 2017, 30. doi: 10.48550/arXiv.1706.02413.[11] YUAN W, KHOT T, HELD D, et al. Pcn: Point completion network[C]. 2018 international conference on 3D vision (3DV), IEEE, Verona, Italy, 2018: 728–737. doi: 10.1109/3DV.2018.00088.[12] CHANG A X, FUNKHOUSER T, GUIBAS L, et al. Shapenet: An information-rich 3d model repository [EB/OL]. https://arxiv.org/abs/1512.03012, 2015.[13] HUANG Zitian, YU Yikuan, XU Jiawen, et al. Pf-Net: Point fractal network for 3D point cloud completion[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 7659–7667. doi: 10.1109/CVPR42600.2020.00768.[14] PROKOP M, SHAIKH S A and KIM K S. Low overlapping point cloud registration using line features detection[J]. Remote Sensing, 2019, 12(1): 61. doi: 10.3390/rs12010061.[15] BESL P J and MCKAY N D. Method for registration of 3-D shapes[C]. SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures, Boston, USA, 1992: 586–606. doi: 10.1117/12.57955.[16] HAN Jianda, YIN Peng, HE Yuqing, et al. Enhanced ICP for the registration of large-scale 3D environment models: An experimental study[J]. Sensors, 2016, 16(2): 228. doi: 10.3390/s16020228.[17] 李仁忠, 杨曼, 田瑜, 等. 基于ISS特征点结合改进ICP的点云配准算法[J]. 激光与光电子学进展, 2017, 54(11): 111503. doi: 10.3788/LOP54.111503.LI Renzhong, YANG Man, TIAN Yu, et al. Point cloud registration algorithm based on the ISS feature points combined with improved ICP algorithm[J]. Laser & Optoelectronics Progress, 2017, 54(11): 111503. doi: 10.3788/LOP54.111503.[18] BIBER P and STRAßER W. The normal distributions transform: A new approach to laser scan matching[C]. Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), IEEE, Las Vegas, NV, USA, 2003, 3: 2743–2748. doi: 1 0.1109/IROS.2003.1249285.[19] 杨宜林, 李积英, 王燕, 等. 基于NDT和特征点检测的点云配准算法研究[J]. 激光与光电子学进展, 2022, 59(8): 0810016. doi: 10.3788/LOP202259.0810016.YANG Yilin, LI Jiying, WANG Yan, et al. Point cloud registration algorithm based on NDT and feature point detection[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0810016. doi: 10.3788/LOP202259.0810016.[20] 荆路, 武斌, 李先帅. 基于SAC-IA和NDT融合的点云配准方法[J]. 大地测量与地球动力学, 2021, 41(4): 378–381. doi: 10.14075/j.jgg.2021.04.010.JING Lu, WU Bin, and LI Xianshuai. Point cloud registration method based on SAC-IA and NDT fusion[J]. Journal of Geodesy and Geodynamics, 2021, 41(4): 378–381. doi: 10.14075/j.jgg.2021.04.010.[21] FEI Ben, YANG Weidong, CHEN Wenming, et al. Comprehensive review of deep learning-based 3D point cloud completion processing and analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 22862–22883. doi: 10.1109/TITS.2022.3195555.[22] 严璐, 顾昕. 激光雷达三维点云目标补全算法[J]. 电子技术与软件工程, 2022(5): 101–104. doi: 10.20109/j.cnki.etse.2022.05.025.YAN Lu and GU Xin. Deep learning on radar centric 3D object completion[J]. Electronic Technology & Software Engineering, 2022(5): 101–104. doi: 10.20109/j.cnki.etse.2022.05.025.[23] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. The 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 6000–6010.[24] GUO Menghao, CAI Junxiong, LIU Zhengning, et al. PCT: Point cloud transformer[J]. Computational Visual Media, 2021, 7: 187–199. doi: 10.1007/s41095-021-0229-5.[25] PAN Xuran, XIA Zhuofan, SONG Shiji, et al. 3D object detection with pointformer[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 7459–7468. doi: 10.1109/CVPR46437.2021.00738.[26] DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale[C]. International Conference on Learning Representations (ICLR). 2021. doi: 10.48550/arXiv.2010.11929.[27] WANG Yue, SUN Yongbin, LIU Ziwei, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics (TOG), 2019, 38(5): 146. doi: 10.1145/3326362.[28] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in neural information processing systems, 2017, 30. doi: 10.48550/arXiv.1706.03762.[29] YANG Yaoqing, FENG Chen, SHEN Yiru, et al. FoldingNet: Point cloud auto-encoder via deep grid deformation[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 206–215. doi: 10.1109/CVPR.2018.00029.[30] 李文博, 王琦, 高尚. 基于深度学习的红外小目标检测算法综述[J]. 激光与红外, 2023, 53(10): 1476–1484. doi: 10.3969/j.issn.1001-5078.2023.10.003.LI Wenbo, WANG Qi, GAO Shang. A review of infrared small target detection algorithms based on deep learning[J]. Laser & Infrared, 2023, 53(10): 1476–1484. doi: 10.3969/j.issn.1001-5078.2023.10.003.[31] FISCHLER M A and BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of Association for Computing Machinery, 1981, 24(6): 381–395.[32] LIU Jiang, ZHU Jiwen, YANG Jinling, et al. Three-dimensional point cloud registration based on ICP algorithm employing K-D tree optimization[C]. SPIE 10033, Eighth International Conference on Digital Image Processing (ICDIP 2016), Chengu, China, 2016: 100334D. doi: 10.1117/12.2248362. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

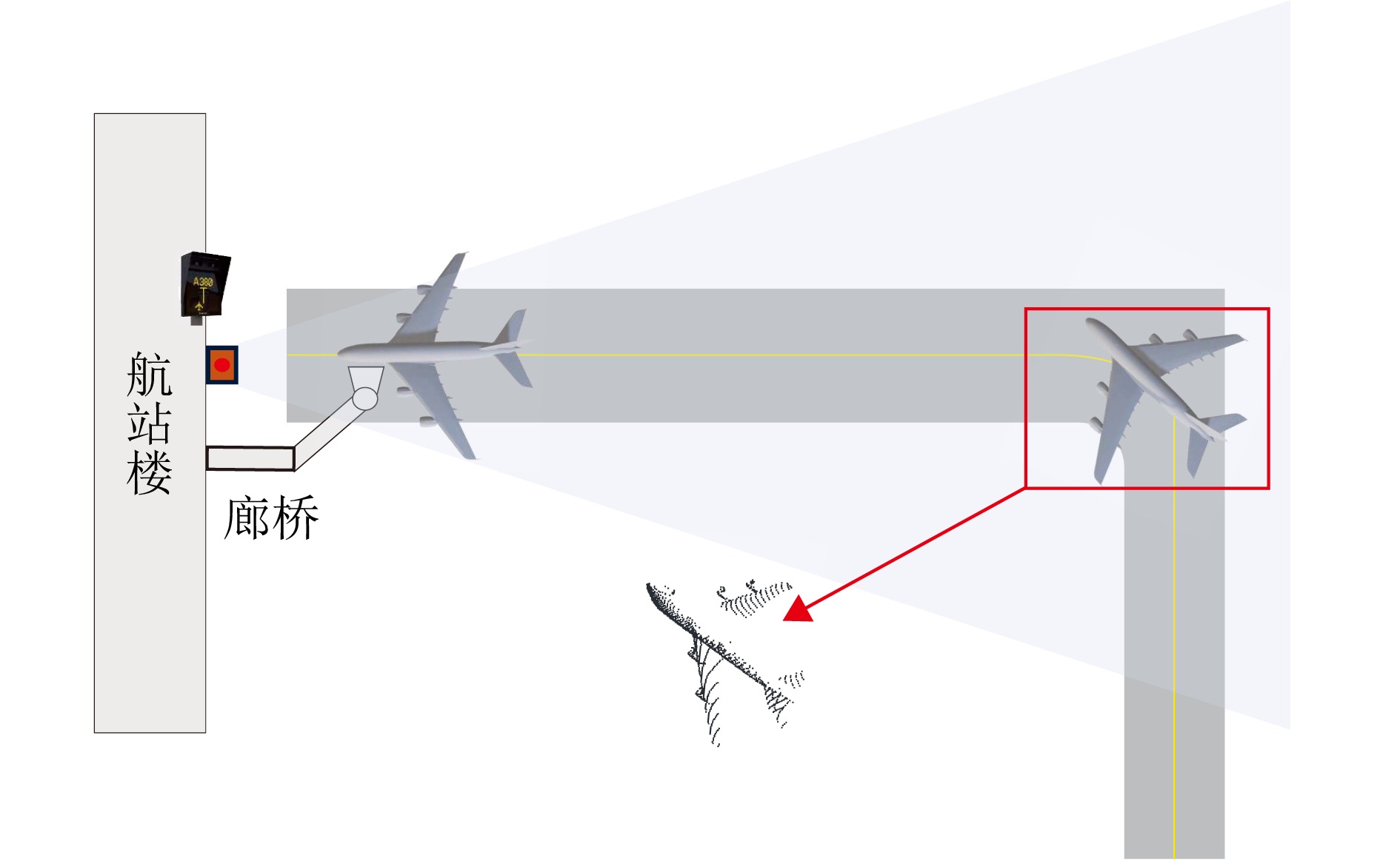
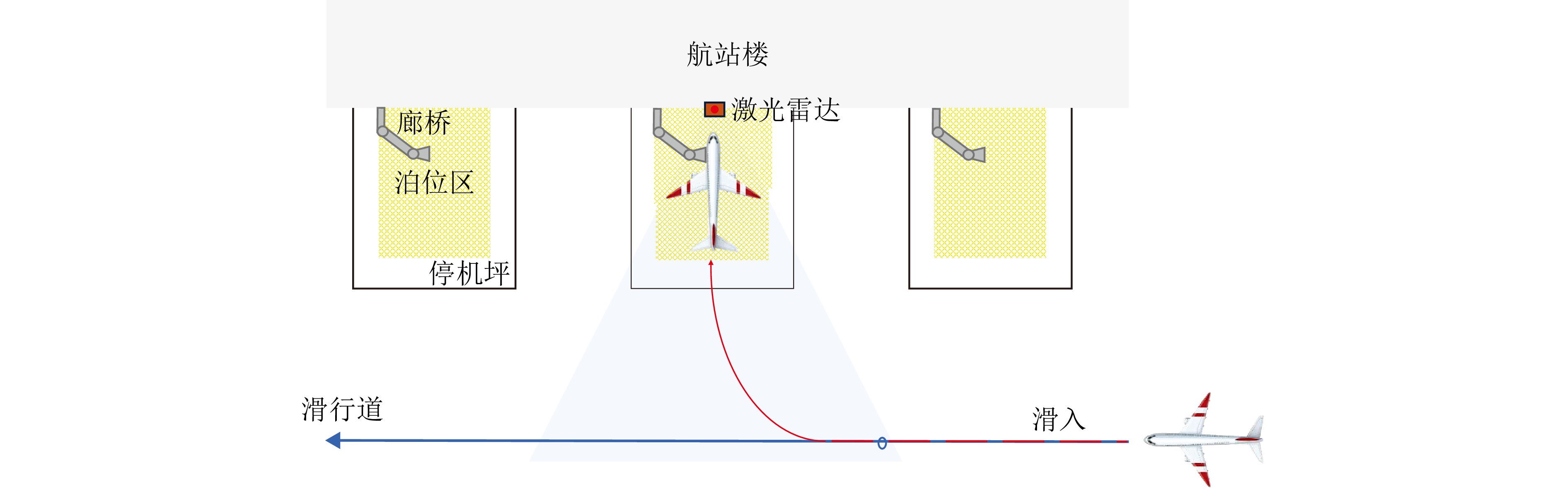
- Figure 1. Structure of airport docking guidance system
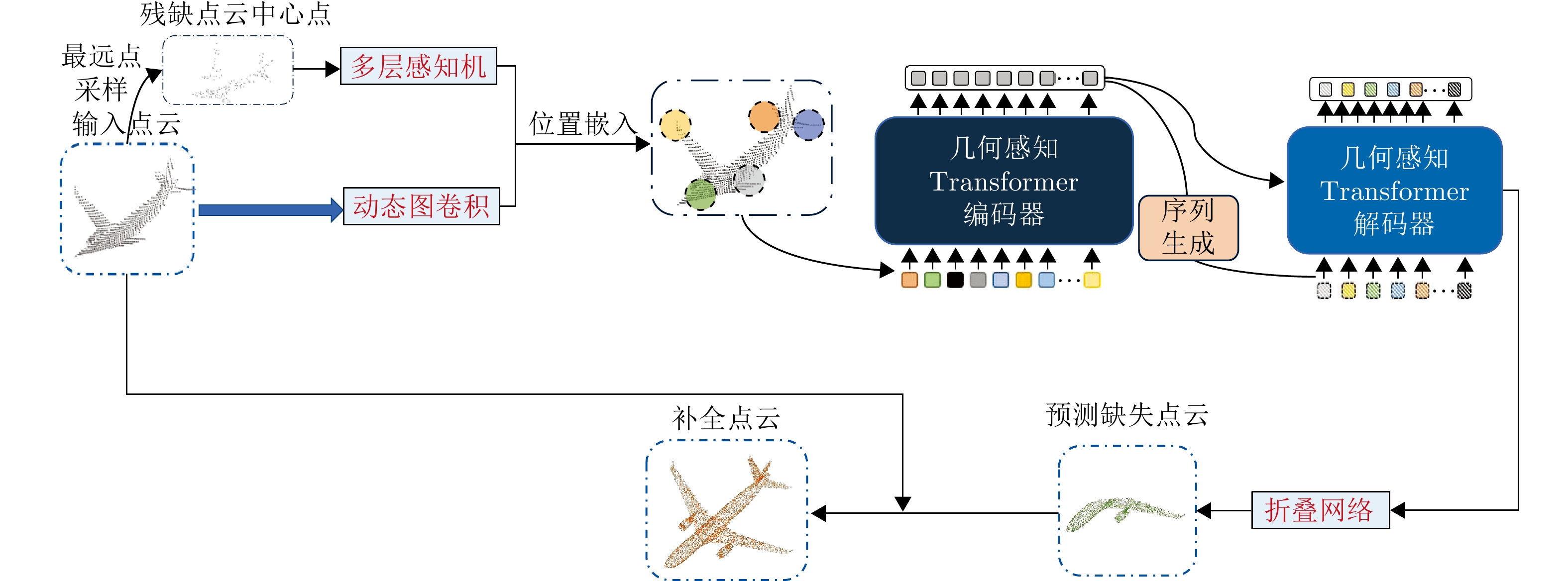
- Figure 2. Architecture of PointSimCompletiton network
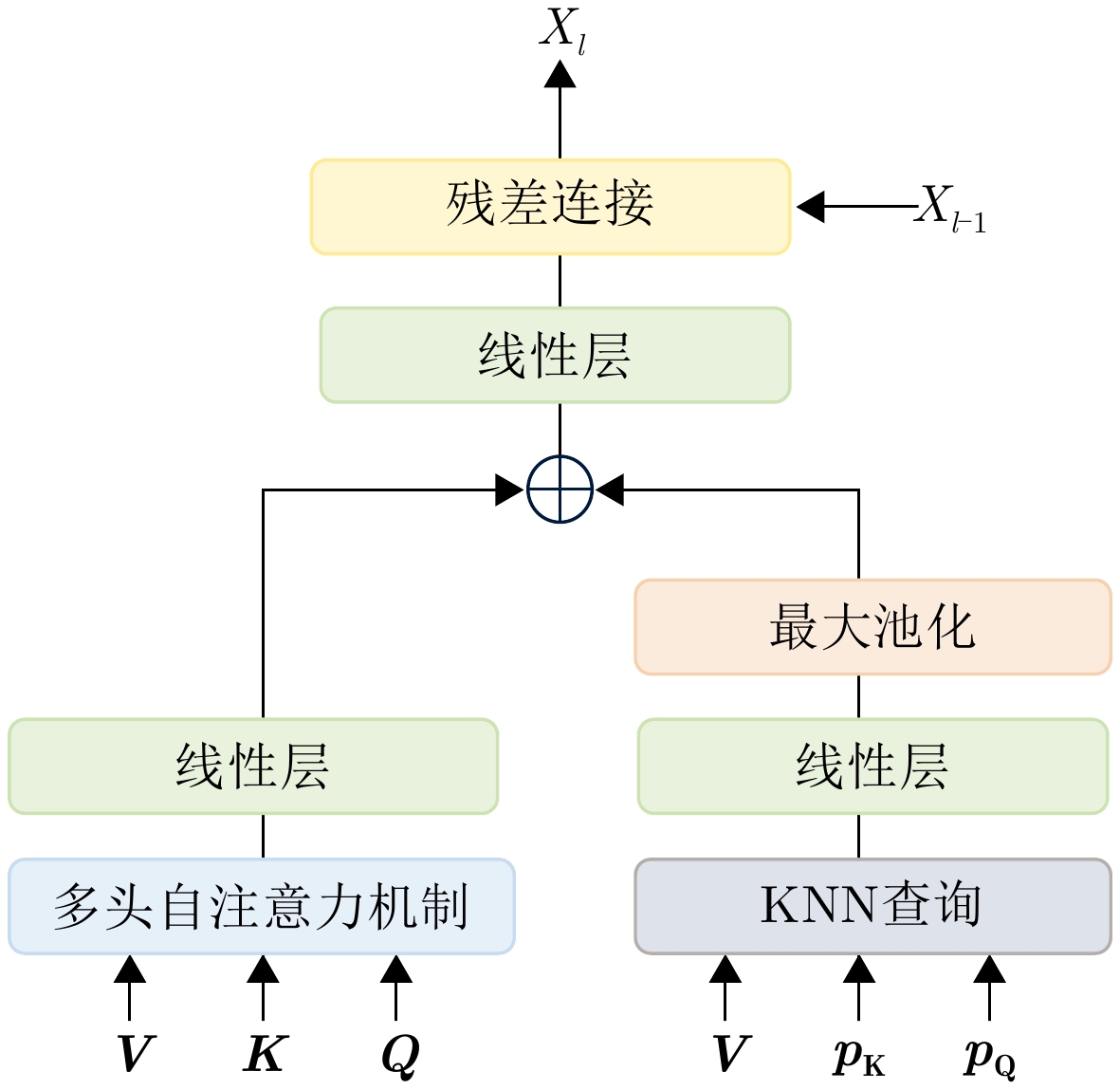
- Figure 3. Geometry-aware Transformer block
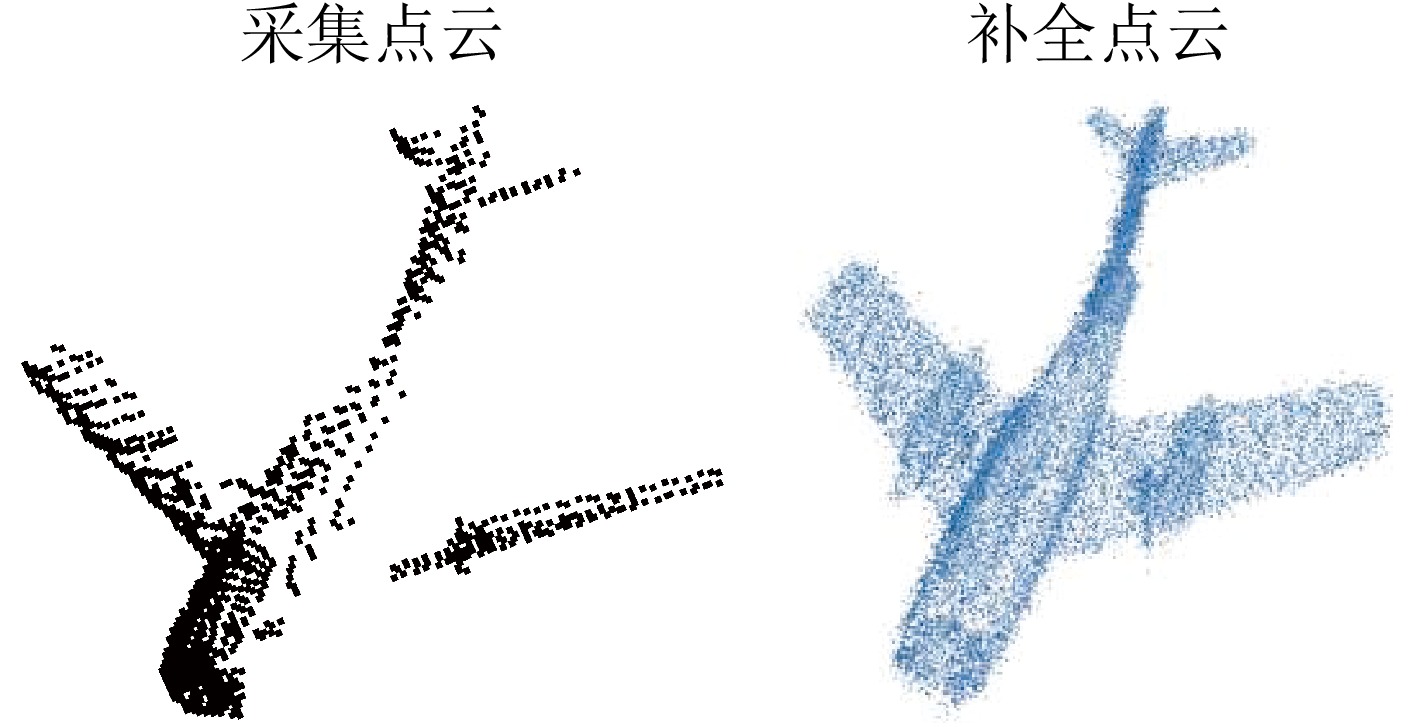
- Figure 4. Completion result of LiDAR point cloud based on simulation data
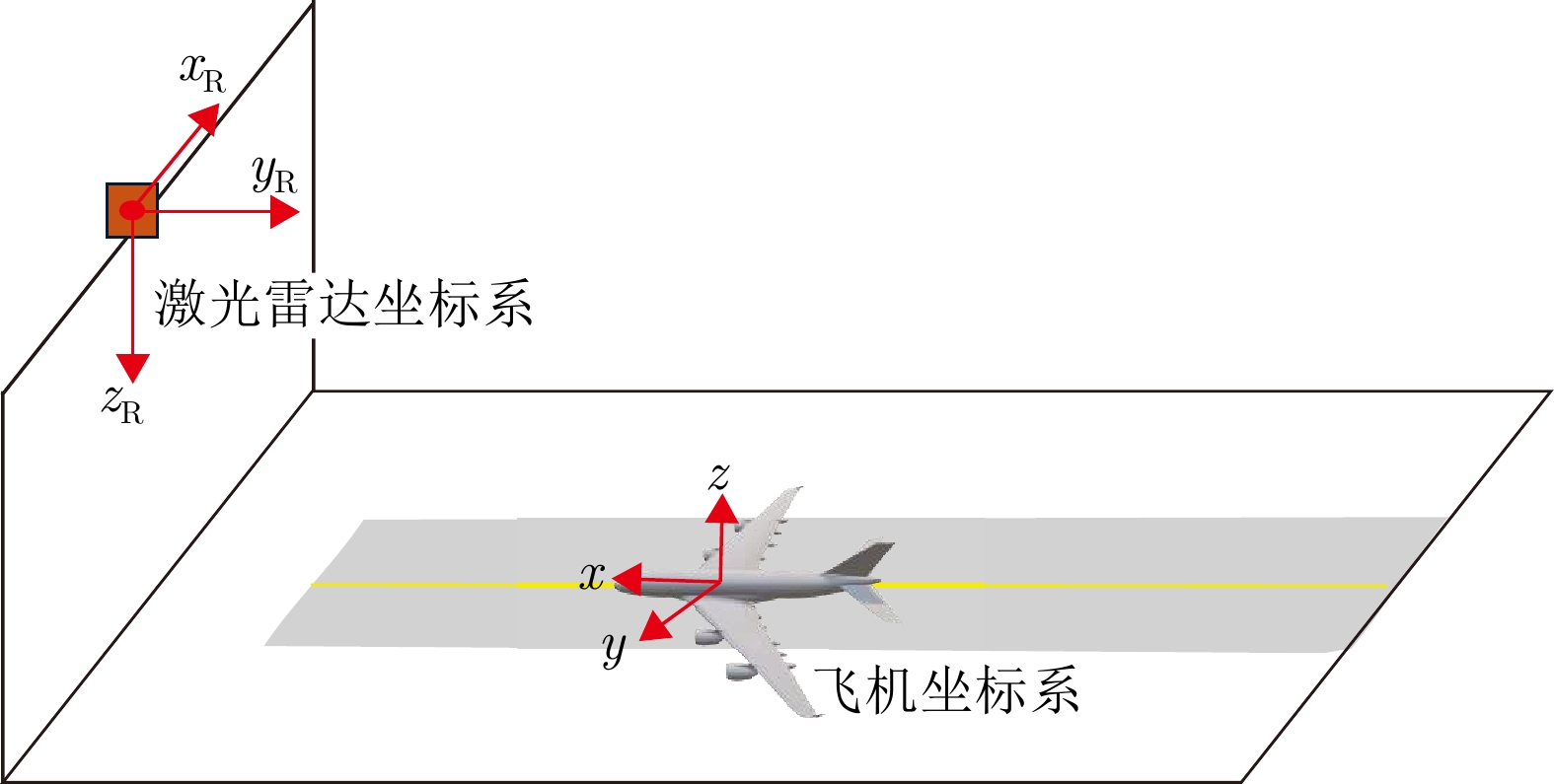
- Figure 5. Diagram of coordinates
- Figure 6. LiDAR simulation for aircraft docking process
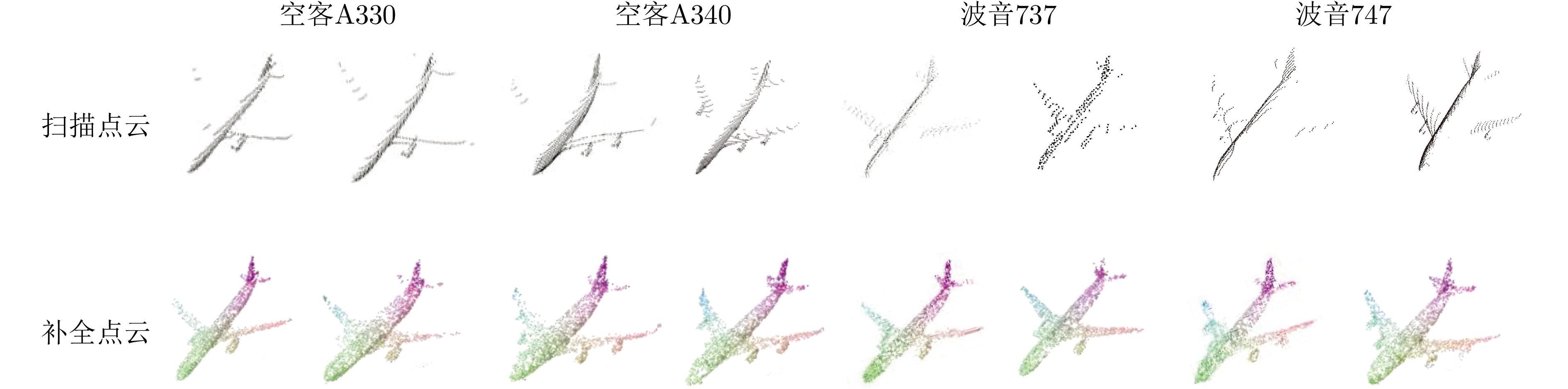
- Figure 7. Completion results of simulation point clouds for different aircraft models
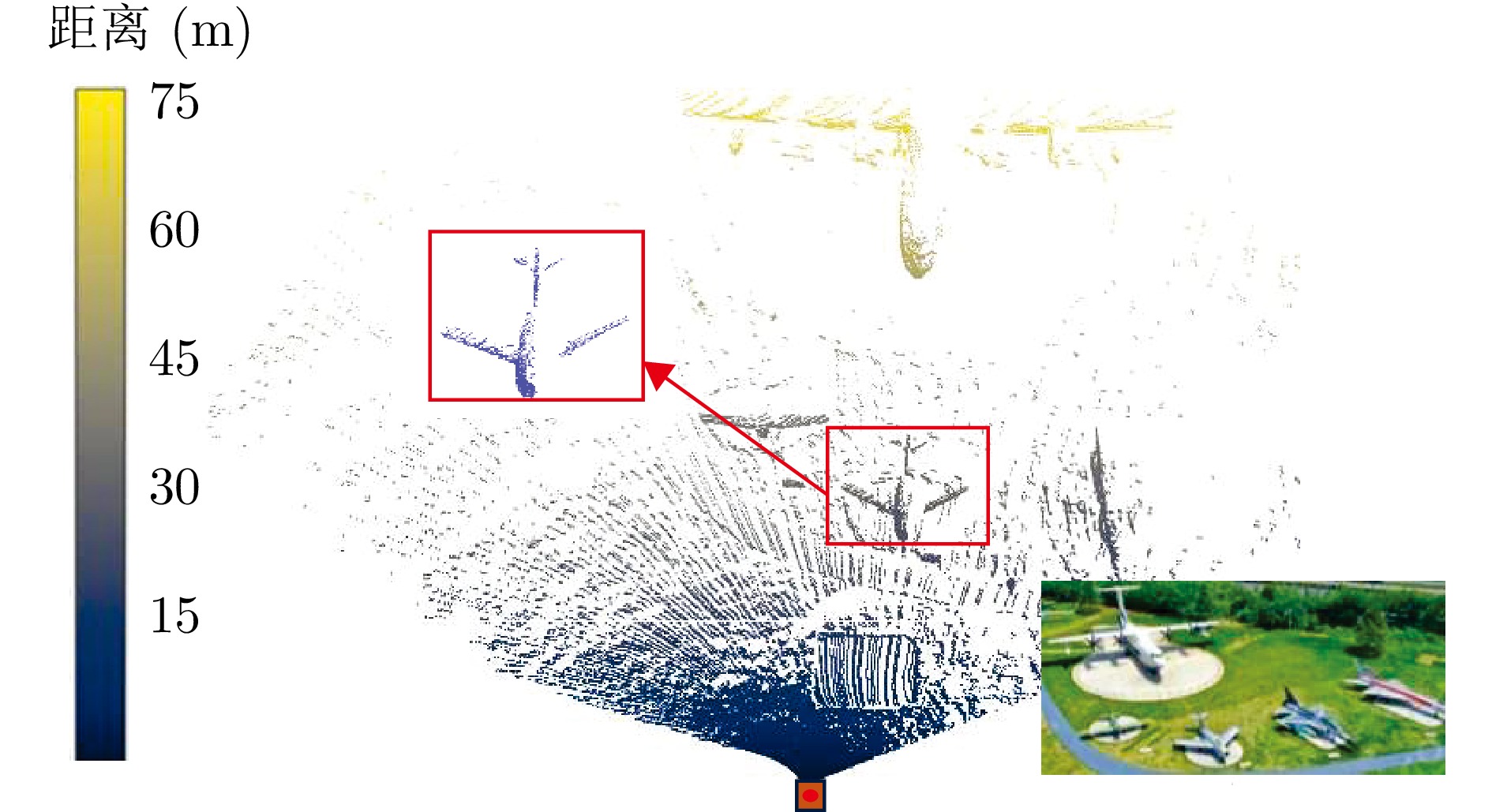
- Figure 8. Scanning point cloud of parking area
- Figure 9. Scanning point cloud and completion result
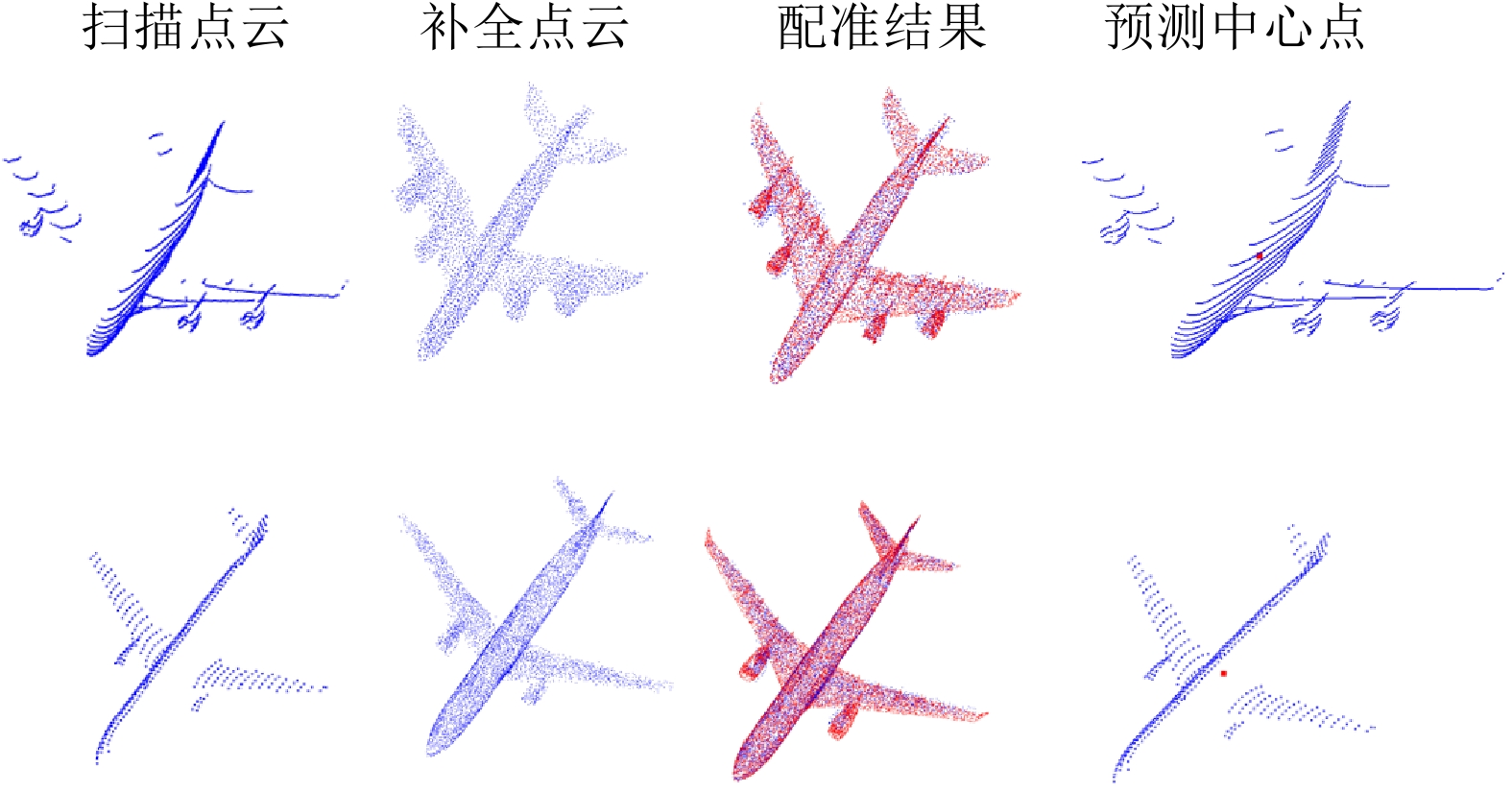
- Figure 10. Predicted centroid of simulation point cloud